
Abstract
In this research, a mathematical derivation is made to develop a nonlinear dynamic model for the nonlinear frequency and chaotic responses of the multi-scale hybrid nano-composite reinforced disk in the thermal environment and subject to a harmonic external load. Using Hamilton’s principle and the von Karman nonlinear theory, the nonlinear governing equation is derived. For developing an accurate solution approach, generalized differential quadrature method (GDQM) and perturbation approach (PA) are finally employed. Various geometrically parameters are taken into account to investigate the chaotic motion of the viscoelastic disk subject to harmonic excitation. The fundamental and golden results of this paper could be that in the lower value of the external harmonic force, different FG patterns do not have any effects on the motion response of the structure. But, for the higher value of external harmonic force and all FG patterns, the chaos motion could be seen and for the FG-X pattern, the chaosity is more significant than other patterns of the FG. As a practical designing tip, it is recommended to choose plates with lower thickness relative to the outer radius to achieve better vibration performance.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A key issue in various engineering field is that the prediction of the properties, behavior, and performance of different systems is an important aspect [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]. Mechanical systems (MS) especially annular disks have many applications in different fields such as engineering, agriculture, and medicine [16,17,18,19]. MS and annular plates are classified based on a wide variety of applications such as geometry, application, and manufacturing process. In a class of MS strictures and disks such as resonators and generators, in which the fundamental part of the system oscillates, understanding the motion responses of the components of the structure becomes impressive [20,21,22,23,24,25,26,27,28,29]. Also, some researchers tried to predict the static and dynamic properties of different structures and materials via neural network solution [30,31,32,33,34,35,36].
In the last several decades, many researchers and engineers have focused their efforts on the development and analysis of complex materials and structures to satisfy needs of an enhanced structural response [15, 37,38,39,40,41,42,43,44,45,46]. Using these unconventional materials, in fact, higher levels of stiffness and strength have been obtained without increasing the weight. Similarly, improvements have been achieved in terms of thermal properties, corrosion resistance, and fatigue life. Since there are an infinite technology’s demands for the mechanical properties’ improvement, multi-scale HNC reinforcement increased the consideration of scientists in the case of design enhancement of practical composites [47,48,49,50]. The reinforcement scale highly depends on the aim of the engineer where the structure should be used. A range of composites manufactured by macroscale reinforcement including carbon fiber (CF) in a certain orientation to boost the performance of the structure mechanically. Recently, it is revealed that composites enriched by multi-scale HNC are much more beneficial in real engineering applications. Thereby, the dynamics of the composites enhanced by multi-scale HNC is a significant area of research [51, 52].
In the field of the linear mechanics of an annular disk, Ebrahimi and Rastgoo [53] explored solution methods to analyze the vibration performance of the FG circular plate covered with piezoelectric. As another survey, Ebrahimi and Rastgoo [54] studied flexural natural frequencies of FG annular plate coupled with layers made of piezoelectric materials. Shasha et al. [55] introduce a novel exact model on the basis of surface elasticity and Kirchhoff theory to determine the vibration performance of a double-layered micro-circular plate. The surface effect is captured in their model as the main novelty. The results obtained with the aid of their modified model showed that the vibration performance of the double-layered microstructure is quite higher than the single-layered one. Gholami et al. [56] employed a more applicable gradient elasticity theory with the capability of including higher order parameters and the size effect in the analysis of the instability of the FG cylindrical micro-shell. Their results confirmed that the radius to thickness ratio and size effect have a significant influence on the stability of the microsystem. On the basis of the FSD theory, Mohammadimehr et al. [57] conducted a numerical study on the dynamic and static stability performance of a composite circular plate by implementing GDQM. Moreover, they considered the thermo-magnet field to define the sandwich structure model. As another work, Mohammadimehr et al. [58] applied DQM in the framework of MCS to describe stress filed and scrutinize the dynamic stability of an FG boron nitride nanotube-reinforced circular plate. They claimed that using reinforcement in a higher volume fraction promotes the strength and vibration response of the structure. Nonlinear oscillation and stability of micro-circular plates subjected to electrical field actuation and mechanical force are studied by Sajadi et al. [59]. They concluded that pure mechanical load plays a more dominant role on the stability characteristics of the structure in comparison with the electro-mechanical load. Also, they confirmed the positive impact of AC or DC voltage on the stability of the system in different cases of application. To determine the critical angular speed of spinning circular shell coupled with a sensor at its end, Safarpour et al. [60] applied GDQM to analyze forced and free oscillatory responses of the structure on the base of thick shell theory. Through a theoretical approach, Wang et al. [61] obtained critical temperature and thermal load of a nanocircular shell. Safarpour et al. [62] introduced a numerical technique with high accuracy to study the static stability, forced and free vibration performance of a nanosized FG circular shell in exposure to thermal site. Also, with the aid of fuzzy and neuromethods, many researchers presented the stability of the complex and composite structures [63,64,65,66,67,68,69,70].
In the field of the nonlinear mechanics of a disk, Ansari et al. [71] reported a mathematical model for investigation of the nonlinear dynamic responses of the compositional disk which is rested on an elastic media. The composite disk which they modeled is a CNT-reinforced FG annular plate. They employed the thick shear deformation and von Karman theories for considering the nonlinearity. Gholami et al. [72] presented the nonlinear static behavior of graphene plate-reinforced annular plate under a dynamical load and the structure is covered with the Winkler–Pasternak media. They applied Newton–Raphson and modified GDQ methods to access the nonlinear bending behavior of the graphene-reinforced disk. Furthermore, a huge number of researches focused on the mechanical properties and nonlinear dynamic responses of the size-dependent beam structures [73,74,75,76,77,78,79,80]. Also, many studies reported the application of applied soft computing method for prediction of the behavior of complex system [81,82,83,84,85,86,87,88].
In the field of the chaotic behavior of different systems, Krysko et al. [89] claimed that the first research on the nonlinear mechanics motion and chaotic responses of a micro-shell is done by them. They employed the couple stress theory for consideration of the size effect and modeled the material property as an isotropic shell. In addition, they used von Kármán and Kirchhoff’s theories for serving the nonlinearity impacts. Their results that consideration the nonlocal and length scale parameter cause to have the periodic vibration responses instead of chaotic and quasi-harmonic. Ghayesh et al. [90] focused on the mathematical model for investigation of the chaotic responses of a geometrically imperfect nanotube which allows fluid flow from the inside of the tube with the aid of nonlocal beam theory. They used the nonlocal strain radiant theory for considering the influences of the size effect parameter and couple stresses due to small effects. Their results presented that increasing the geometric imperfection and velocity of fluid flow leads to see the chaotic responses. With the aid of perturbation and higher order shear deformation methods, Karimiasl [91] investigated the chaotic behaviors of a doubly curved panel which is reinforced with graphene and carbon nanotube. The research showed that increasing the curvature effect leads to decrease the chaosity of the system. Ghayesh et al. [92] presented the chaos response of the nanotube using the nonlocal strain radiant Pertopation technique. In addition, they assumed that fluid can flow through the structure and they considered the viscoelastic parameters. As a result, they found that the velocity of the fluid flow can play an important role on the chaos analysis. Farajpour et al. [93] studied the bifurcation responses of a clamped–clamped micro-shell under a harmonic force and embedded in a viscoelastic media. They employ the couple stress theory for considering the size effect. Chen et al. [94] presented the chaos motion of a bear which is used as a shaft in a rotor. They focused on the investigation of the effect of excitation force and damping on the phase and Poincare map of the tapered shaft. Farajpour et al. [95] did a research on the bifurcation behavior of a microbeam using size-dependent couple stress theory and Galerkin method. They modeled the fluid flow with the aid of Beskok–Karniadakis method. They found that the chaos motion can decline by employing an imperfection. Ghayesh et al. [96] developed a mathematical model for the investigation of the bifurcation responses of a viscoelastic microplate via couple stress theory and Kelvin–Voigt model. In their result, they bolded the effect of the viscoelastic parameter on the nonlinear responses of the system. With the aid of Runge–Kutta, couple stress theory, and Galerkin methods, Wang et al. [97] revealed the chaos behaviors of a microplate under an electroelastic actuator. As a remarkable result, they claimed that could develop a novel theory for studying the Poincare map and bifurcation diagram of the microplate. Farajpour et al. [98] presented the effect of the couple stress and viscoelastic parameters on the Poincare and phase map of the imperfect microbeam using Beskok–Karniadaki model. Yang et al. [99] gave out a presentation about the nonlinear dynamic behavior of the electrically reinforced shell under thermal loading with the aid of Runge–Kutta and von Kármán models. They showed that external voltage plays a remarkable effect on chaos responses of the system. Ghayesh and Farokhi [75] run out a research on the chaos motion of a geometrically imperfect microbeam under external axial load along the length of the beams. Krysko et al. [100] investigated the chaos responses of a spherical rectangular micro-/nanoshell based on the von Karman model, Hamilton energy principle, Galerkin, and Runge–Kutta method. By having an exact explorer into the literature, no one can claim that there is any research on the chaos responses of a disk or annular plate.
To the best of authors’ knowledge, none of the published articles focused on analyzing the chaotic responses of the multi-scale hybrid nano-composite-reinforced disk in the thermal environment and subjected to a harmonic external load. In this survey, the extended model of Halpin–Tsai micromechanics is applied to determine the elastic characteristics of the composite structure. A numerical approach is employed to solve differential governing equations for different cases of boundary conditions. Eventually, a complete parametric study is carried out to reveal the impact of some geometrical and physical parameters on the quasi-harmonic and chaotic responses of the multi-scale hybrid nano-composite-reinforced disk.
2 Theory and formulation
2.1 Problem description
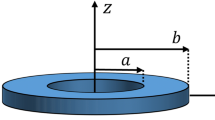
Figure 1 shows detail about the MHCD which is formulated for investigation of the chaotic behavior.

Geometry of a multi-hybrid reinforced composite disk in a thermal environment
The homogenization procedure is presented according to the Halpin–Tsai model. The effective properties can be formulated as follows:
The index of F, and NCM show fiber and nanocomposite matrix, respectively. Besides, have
The effective Young’s modulus of the nanocomposite with the aid of Halpin–Tsai–micromechanics theory can be presented as follows:
in which βdd and βdl are given by
Besides, the \(V_{\text{CNT}}^{*}\) can be formulated as follows:
Besides, the VCNT can be formulated as below:
Also, for \({\text{j = 1,2,}}...{,}Nt\), we have \(\xi_{j} = \left( {\frac{1}{2} + \frac{1}{{2N_{t} }} - \frac{j}{{N_{t} }}} \right)h\). For total volume fraction, we have
The effective shear module, Poisson’s ratio and mass density parameters of the nanocomposite matrix could be expressed as below:
Moreover, the expansion coefficients of the MHC is determined as
where \(\alpha^{\text{NCM}}\) which is equal to
2.2 Kinematic relations
The HOSD theory is chosen to define the corresponding displacement fields of the MHCD according to the subsequent relation:
Based on the conventional form of the high-order deformation theory [101], c1 is equal to 4/3h2. strain components would be written as
where \(\varepsilon_{\theta \theta }\) and \(\varepsilon_{RR}\) indicate the corresponding normal strains in θ and R directions. Also, \(\gamma_{RZ}\) presents the shear strain in the RZ plane. Equation (12) would be formulated as
2.3 Extended Hamilton’s principle
To acquire the governing equations and related boundary conditions, we can utilize Hamilton’s principle as below [17,18,19, 102,103,104,105,106,107]:
The following relation describes the components involved in the process of obtaining the strain energy of the aforementioned disk:
The resultants of the moment and force can be obtained as
The variation of the work done by external force can be formulated as follows:
where q can be defined as follows:
The applied work due damper coefficient can be presented as below:
Furthermore, the variation of the work induced by thermal gradient is formulated as
Force resultant of NT involved in Eq. (25) can be determined by the following relation:
It is worth noting that in this study, one pattern is considered for the temperature gradient across the thickness as
The first variation of the kinetic energy would be formulated as
where \(\left\{ {I_{i} } \right\} = \int\limits_{{ - \frac{h}{2}}}^{\frac{h}{2}} {\left\{ {z^{i} } \right\}\rho^{\text{NCM}} dz} ,\,\,\,i = 1:6\). Now by replacing Eqs. (25), (20), (19), (17) and (15) into Eq. (14) the motion equations of MHCD can be formulated as following equations:
The boundary conditions are obtained as below:
2.4 Governing equations
The stress–strain relation would be formulated as below [108,109,110,111,112,113]:
with
\(\theta\) is the orientation angle with [29, 64, 114,115,116,117,118,119,120,121,122,123]:
Finally, the governing equation of the MHCD can be obtained as follows:
with \(\int_{{ - \frac{h}{2}}}^{\frac{h}{2}} {\left\{ {z^{6} ,z^{5} ,z^{4} ,z^{3} ,z^{2} ,z^{1} ,1} \right\}} \overline{Q}_{ij} dz = \left\{ {G_{ij} ,F_{ij} ,E_{ij} ,D_{ij} ,C_{ij} ,B_{ij} ,A_{ij} } \right\}\). So, Eqs. (31a–c) can be formulated as follows (for details, see ‘Appendix’):
3 Procedure to obtain the solution
To study the vibrational characteristics of a cylindrical micropanel, the GDQM [22, 60, 63, 120, 124,125,126,127,128,129,130] method which is a computational technique is used. A weighted linear sum of the function at all the discrete mesh points estimates the nth-order derivatives of a function with respect to its relative discrete points which must be within the total length of the domain [28, 131,132,133,134,135,136,137]. Hence, this function can be expressed as
where g(r) are weighting coefficients of GDQM. From Eq. (33), it is apparent that calculating the weighting coefficients is the essential parts of DQM. To estimate the nth order derivatives of function along radius direction, two forms of DQM developed of GDQM are adopted in this study. Thus, the weighting coefficients are computed from the first-order derivative which is shown below [17,18,19]:
with
Likewise, the weighting coefficients for higher order derivatives can be calculated using the shown expressions.
In the presented research, the set of grid points is chosen as below:
For convenience, before solving the governing equation, displacement components are written in the following form to separate time and space variables:
Now, by substituting Eq. (38) into Eqs. (32a–c) and using Eq. (33) to solve the unknown functions u(t), w(t) and Øx(t) in terms of w(t), the nonlinear differential equation of disk can be driven as
where
subsequently, the panel linear oscillation can be defined as
and \(\overline{\omega }_{L} = \omega_{L} b^{2} \sqrt {\frac{{\rho_{m} }}{{E_{m} }}} { ,}\) where by initial boundary conditions can be identified as
By replacing the g(t) instead of W(t) in Eq. (39), and by considering F(t) and C equal to zero, we have the following equation:
in which
By implementing the homotopy perturbation method, solution for Eq. (44) can be given as
where \(\xi \in \left[ {0,1} \right]\) is an integrated variable When \(\xi = 0\), Eq. (45) will be representing linear differential relation which is shown as
where
Substituting Eq. (47) into Eq. (46), we get
Hence, computing Eq. (48a) results in
Utilizing Eqs. (48b, 49), the following expression can be achieved as shown below:
Hence, elimination in terms of \(g_{0} \left( t \right)\) will yield
in which the nonlinear form of the frequency of the MHCD would be formulated as
where \(A^{*} = \frac{W}{{h^{2} }},\)
3.1 Primary resonance
In this case, it is supposed that \({\omega }_{L}\) is near to \(\Omega\). So a parameter of σ is presented to illustrate the nearness of \(\Omega\) to \({\omega }_{0}\) as
To study the oscillations and bifurcations of the nonlinear system, the multi-scale method is presented to investigate the nonlinear vibration responses of the nanocomposite annular plate [138]. The uniformly approximate solutions of Eq. (39) are obtained as
where T0 = t and T1 = εt. The excitation in terms of \({T}_{0}\) and \({T}_{1}\) is expressed as
Then the derivatives with respect to t become
where \(D_{0} = \frac{\partial }{{\partial T_{0} }},\,\,\,D_{1} = \frac{\partial }{{\partial T_{1} }}\,\,\,{\text{and}}\,\,D_{0} D_{1} = \frac{{\partial^{2} }}{{\partial T_{0} \partial T}}\). Substituting Eqs. (55–57) into Eq. (39) and equating the coefficients of ε equal to zero yields the following differential equations:
The solution of Eq. (58a) can be suggested as
The governing equations for A are gained by requiring \({w}_{1}\) to be periodic in \({T}_{0}\) and extracting secular terms which are coefficients of \({e}^{\pm i{\upomega }_{0}{T}_{0}};\) the solvability equation will be determined as
where
Substituting Eq. (61) into Eq. (60) and separating real and imaginary parts, we have
Term \({T}_{1}\) can be eliminated by transforming Eqs. (62a–b) to an autonomous system considering:
and substituting Eq. (63) into Eqs. (62a–b) leads to
The point at \({a}^{^{\prime}}=0\) and \({\theta }^{^{\prime}}=0\) corresponds to a singular point of the system and illustrates the motion of the steady-state of the system. So, in the condition of steady state, we have
Squaring and adding these equations, one may obtain the frequency response equation:
Substituting Eqs. (65a–b) into Eq. (63) and substituting that result in Eq. (61) and substituting that result in Eq. (59) and Eq. (55), one may obtain the first approximation:
With this, the response of the amplitude (magnification factor) could be expressed as
The maximum value of the magnification factor could be found from differentiating Eq. (68a) with respect to \(\Omega\):
which can be solved for \(\frac{d\alpha }{d\Omega }\) as
This derivative vanishes (and so does \(\frac{dM}{d\Omega }\)) when
By considering \(\frac{d\Omega }{dM}=0\), the values of the critical points \({\Omega }_{1}\) and \({\Omega }_{2}\) can be obtained [139]. This condition can be found by following equation:
So
4 Periodic solutions, poincare sections, and bifurcations
4.1 Periodic solutions
The steady-state forced vibrations of the current study are periodic solutions. We suggested that
where \(x\in {\mathbb{R}}^{n},t\in {\mathbb{R}}\), is said to have a periodic solution (orbit) X of least period P if this solution satisfies X(\({x}_{0}={t}_{0})\) =X(\({x}_{0}={t}_{0}+{P}_{0})\) for all initial conditions \({x=x}_{0}\) on this orbit at \({t=t}_{0}\). To transform the Duffing equation into this form, it is first to recast as a system of first-order equations as follows [139]:
The following transformations, motivated by the method of variations of parameters
Finally, we have
4.2 Poincare section and poincare map
In this section, the second-order non-autonomous Eq. (39) can be converted to the autonomous system
Note that Duffing Eq. (78) is invariant under the transformation \({w}_{1}\rightarrow -{w}_{1},{w}_{2}\rightarrow -{w}_{2},t\rightarrow t-\frac{\pi }{\Omega }\). The state space of this system (the so-called extended state space) is the three-dimensional Euclidean space\({\mathbb{R}}\times {\mathbb{R}}\times {\mathbb{R}}={\mathbb{R}}^{3}\). Since the forcing is periodic with period T = \(\frac{2\pi }{\Omega }\), the solutions are invariant to a translation in time by T. This observation can be utilized to introduce an essential tool of nonlinear dynamics, the Poincare section. Starting at an initial time \({t=t}_{0}\), the points on a suitable surface (\(\sum ,\) the Poincare section) can be collected by stroboscopically monitoring the state variables at intervals of the period T can be recast in the following form:
where \(\theta =\frac{2\pi t}{T}\) (mod 2 \(\pi\)). Since the response at t = 0 and t = T can be considered to be identical, the state space of Eq. (79) is the cylinder \({\mathbb{R}}^{2}\times S\rightarrow\)S1. This topology results from the state space (\({w}_{1},\) \({w}_{2},t)\) with the points t = 0 and t = T ‘glued together’.
The normal vector n to this surface \(\sum ,\) is given by
and the positivity of the dot product.
4.3 Results
In the current study, MHC is a useful reinforcement that we used in this work. The properties of the reinforcement and pure epoxy are shown in Table 1 [140].
4.4 Validation study
Table 2 is presented for investigation of the validity in the present work by comparing our results with Ref. [141] for two geometrical parameters (a/b and h/b) in which they are shown in Fig. 1. Also, the validation is done for two boundary conditions (clamped–clamped and simply–simply). With respect to Table 2, we can claim that differences between our result and that in Ref. [141] is less than 2%.
4.5 Parametric study
Figure 2 represents and compares the variation of the associated mechanical properties (such as volume fraction of CNTs, elasticity modulus, mass density, Poisson’s ratio, shear modulus, and thermal expansion of the MHCD) of the annular plate for each FG distribution patterns across the thickness by considering equal MHCD particles weight fraction.

Through-the-thickness variation of mechanical properties \(\left( {{{\theta = }}\frac{{\pi }}{{4}},{{ W}}_{\text{CNT}} = 0.02,{{ V}}_{F} = 0.2} \right)\)
Figure 3 provides a presentation about the impact of the different CNT distribution patterns and the increasing large deflection parameter (A*) on the nonlinear frequency response of the simply–simply MHCD. The common result is that for every FG pattern, there is a direct relation between A* parameter and nonlinear dynamic response of the MHCD. For better understanding, increasing the A* parameter causes to increase the nonlinear natural frequency of the FG annular structures, exponentially. The main point which is come up from Fig. 3 is that for each value of the A* parameter, the highest and lowest nonlinear frequency is for the FG annular plate with FG-A and FG-X patterns, respectively, and this issue is decreased in the higher value of the A* parameter. For more detail, the best FG pattern for serving the highest nonlinear dynamic response of an MHCD-reinforced annular plat is FG-A.

Effects of CNT pattern on the nonlinear non-dimensional natural frequency of the simply–simply MHCD with b/a = 4, h/b = 0.3, Ti = 273 [K], To = 300 [K], UTR, \({{\theta = }}\frac{{\pi }}{{4}}\), WCNT = 0.02, VF = 0.2, Kp = 10 [MN/m] and Kw = 100 [MN/m3] for large deflection values
The effects of rising temperature patterns (uniform, power, sinusoidal) and A* parameter on the nonlinear non-dimensional natural frequency of the simply–simply supported MHCD-reinforced annular plate is presented in Fig. 4. According to this figure, for each value of the A* parameter, rising temperatures with sinusoidal and uniform patterns encounter us with an MHCD-reinforced annular plate which has the highest and lowest nonlinear natural frequency.

Effects of rising temperature on the nonlinear non-dimensional natural frequency of the simply-simply MHCD with b/a = 4, h/b = 0.3, Ti = 273 [K], To = 300 [K], \({{\theta = \pi }}/4\), WCNT = 0.02, VF = 0.2, Kp = 10 [MN/m] and Kw = 100 [MN/m3] for large deflection values
With consideration of the thermal environment, the influence of external harmonic force (\(\bar{F}\)) and different pattern of the multi-scale hybrid nanocomposites (FG-UD, FG-A, FG-V, and FG-X) on the time history on the planes (x,t), phase-plane on the planes (x,\(\dot{x}\)), and Poincaré maps on the planes (\({x}_{1}\),\({x}_{2}\)) of the MHC-reinforced disk with clamped–clamped boundary conditions, h/a = 0.1, FG-A, Ti = 273 [K], T0 = 300 [K], STR, ϴ = π/4, WCNT = 0.02, VF = 0.2,\(\bar{q}=2\), \(\overline{C}\)=0.01, Kp = 10 [MN/m] and Kw = 100 [MN/m3] are presented in Figs. 5,6,7and8.

The influence of \(\bar{F}\) on the time history on the planes (x,t), phase-plane on the planes (x,\(\dot{x}\)), and Poincaré maps on the planes (\({\mathrm{x}}_{1}\),\({x}_{2}\)) of the FG-UD pattern of the multi-scale hybrid nano-composite-reinforced disk with clamped–clamped boundary conditions

the influence of \(\bar{F}\) on the time history on the planes (x,t), phase-plane on the planes (x,\(\dot{x}\)), and Poincaré maps on the planes (\({x}_{1}\),\({x}_{2}\)) of the FG-A pattern of the multi-scale hybrid nano-composite-reinforced disk with clamped–clamped boundary conditions

the influence of \(\bar{F}\) on the time history on the planes (x,t), phase-plane on the planes (x,\(\dot{x}\)), and Poincaré maps on the planes (\({x}_{1}\),\({x}_{2}\)) of the FG-X pattern of the multi-scale hybrid nano-composite-reinforced disk with clamped–clamped boundary conditions

the influence of \(\bar{F}\) on the time history on the planes (x,t), phase-plane on the planes (x,\(\dot{x}\)), and Poincaré maps on the planes (\({x}_{1}\),\({x}_{2}\)) of the FG-V pattern of the multi-scale hybrid nano-composite-reinforced disk with clamped–clamped boundary conditions
According to Figs. 5,6,7and8, for all FG patterns, it could be seen that by increasing the value of the \(\bar{F}\) parameter, the motion and dynamic responses of the MHC-reinforced disk is changed from harmonic to the chaotic with respect to the time history, phase-plane, and Poincaré maps. By having a comparison between the above figures, it is clear that for all FG pattern, when \(\bar{F}=1,\) the motion behavior of the system is harmonic. For better understanding, in the lower value of the external harmonic force, different FG patterns do not have any effects on the motion response of the structure. But, for the higher value of external harmonic force and all FG patterns, the chaos motion could be seen and for the FG-X pattern, the chaosity is more significant than other patterns of the FG.
4.6 Conclusion
This was the fundamental research on the nonlinear sub- and supercritical complex dynamics of a multi-hybrid nanocomposite-reinforced disk in the thermal environment and subject to a harmonic external load. The displacement–strain of nonlinear vibration of the multi-scale laminated disk via third-order shear deformation (TSDT) theory and using von Karman nonlinear shell theory was obtained. Hamilton’s principle was employed to establish the nonlinear governing equations of motion, which was finally solved by the GDQM and PA. To examine the validity of the approach applied in this study, the numerical results were compared with those published in the available literature and a good agreement was observed between them. The numerical results revealed that
-
As a practical designing tip, it was recommended to choose plates with lower thickness relative to the outer radius to achieve better vibration performance.
-
In the lower value of the external harmonic force, different FG patterns did not have any effects on the motion response of the structure. But, for higher value of external harmonic force and all FG patterns the chaos motion could be seen, and for FG-X pattern, the chaosity was more significate than other patterns of the FG.
-
For each value of the A* parameter, rising temperatures with sinusoidal and uniform patterns encounter us with an MHCD-reinforced annular plate which had the highest and lowest nonlinear natural frequency.
Change history
09 June 2023
This article has been retracted. Please see the Retraction Notice for more detail: https://doi.org/10.1007/s00366-023-01859-y
Abbreviations
- h, R 0, and R i :
-
Thickness, inner, outer radius of the disk, respectively
- F and NCM:
-
Fiber and nanocomposite matrix, respectively
- \(\rho ,\,\,E,\,\nu ,\,\alpha \,\,\,and\,\,\,G\) :
-
Density, Young’s module, Poisson’s ratio, thermal expansion and shear parameters, respectively
- \(V_{\text{NCM}} ,{{ V}}_{F}\) :
-
Volume fractions of nanocomposite matrix and fiber, respectively
- \(E^{\text{CNT}}\), \(t^{\text{CNT}}\), \(l^{\text{CNT}}\), \(d^{\text{CNT}}\), and \(V_{\text{CNT}}\) :
-
Young’s module, thickness, length, diameter, and volume fraction of carbon nanotubes, respectively.
- \(V_{\text{CNT}}^{*} ,\,\,\,W_{\text{CNT}}\) :
-
Effective volume fraction and weight fraction of the CNTs, respectively
- Nt, V CNT :
-
Layer number and volume fraction of CNTs
- U, V, W :
-
Displacement fields of a disk
- u, w and Øx :
-
Displacements of the mid-surface in R and Z directions and rotations of the transverse normal around θ direction, respectively
- \(\varepsilon_{RR}\) and \(\varepsilon_{\theta \theta }\) :
-
Corresponding normal strains in \(R\) and \(\theta\) directions, respectively
- \(\gamma_{RZ}\) :
-
Shear strain in the \(RZ\) plane
- T, U, W :
-
Corresponding kinetic energy, strain energy of the system and the work done, respectively
- K W, C, N T :
-
Winkler coefficient, damping parameter, and thermal resistance force, respectively.
- q dynamic and F :
-
Dynamical force and force, respectively
- I i :
-
Mass inertias
- \(\sigma_{RR} \,\,and\,\,\sigma_{\theta \theta }\) :
-
Corresponding normal stress in R and \(\theta\) directions
- \(\tau_{RZ}\) :
-
Shear stress in the RZ plane
- \(Qij\), \({\bar{Q}}_{ij}\) and \(\theta\) :
-
Stiffness elements, stiffness elements related to orientation angle and the orientation angle, respectively
- \(\omega_{L} ,\,\,\overline{\omega }_{L}\) :
-
Linear non-dimensional linear natural frequencies, respectively
- \(\omega_{NL} ,\,\,\overline{\omega }_{NL}\) :
-
Nonlinear non-dimensional nonlinear natural frequencies, respectively
- C, P 1, P 2 and \(\gamma\) :
-
Damping coefficient, linear part of the w, nonlinear part (order one) of the w and nonlinear part (order two) of the w, respectively
- \(a\) :
-
Deflection which is dimensionless
- \(\Omega ,\,\,\,\sigma \,\,and\,\,\varepsilon\) :
-
Excitation frequency, detuning parameter and perturbation parameter, respectively
- T 0 and T 1 :
-
Excitation term
- \(\overline{q}\) :
-
The weakness form of the external force
- \(\overline{A}\,\,\text{and}\,\,A\) :
-
Unknown complex conjugate and complex functions, respectively.
- \(\omega_{0}\) :
-
Primary resonance
- \(\alpha \,\,\,\text{and}\,\,\,\beta\) :
-
Amplitude and phase, respectively
- M :
-
Magnification factor
References
Liu X, Zhou X, Zhu B, He K, Wang P (2019) Measuring the maturity of carbon market in China: an entropy-based TOPSIS approach. J Cleaner Product 229:94–103
Zhu B, Ye S, Jiang M, Wang P, Wu Z, Xie R, Chevallier J, Wei Y-M (2019) Achieving the carbon intensity target of China: a least squares support vector machine with mixture kernel function approach. Appl Energy 233:196–207
Zhu B, Su B, Li Y (2018) Input-output and structural decomposition analysis of India’s carbon emissions and intensity, 2007/08–2013/14. Appl Energy 230:1545–1556
Cao Y, Wang Q, Cheng W, Nojavan S, Jermsittiparsert K (2020) Risk-constrained optimal operation of fuel cell/photovoltaic/battery/grid hybrid energy system using downside risk constraints method. Int J Hydro Energy 45:14108–14118
Cao Y, Wang Q, Fan Q, Nojavan S, Jermsittiparsert K (2020) Risk-constrained stochastic power procurement of storage-based large electricity consumer. J Energy Storage 28:101183
Liu Y-X, Yang C-N, Sun Q-D, Wu S-Y, Lin S-S, Chou Y-S (2019) Enhanced embedding capacity for the SMSD-based data-hiding method. Signal Process 78:216–222
Zhang X, Zhang Y, Liu Z, Liu J (2020) Analysis of heat transfer and flow characteristics in typical cambered ducts. Int J Therm Sci 150:106226
Hu X, Ma P, Wang J, Tan G (2019) A hybrid cascaded DC–DC boost converter with ripple reduction and large conversion ratio. IEEE J Emerg Select Topics Power Electron 8(1):761–770
Hu X, Ma P, Gao B, Zhang M (2019) An integrated step-up inverter without transformer and leakage current for grid-connected photovoltaic system. IEEE Trans Power Electron 34(10):9814–9827
Wu X, Huang B, Wang Q, Wang Y (2020) High energy density of two-dimensional MXene/NiCo-LDHs interstratification assembly electrode: understanding the role of interlayer ions and hydration. Chem Eng J 380:122456
Guo L, Sriyakul T, Nojavan S, Jermsittiparsert K (2020) Risk-based traded demand response between consumers’ aggregator and retailer using downside risk constraints technique. IEEE Access 8:90957–90968
Cao B, Zhao J, Lv Z, Gu Y, Yang P, Halgamuge SK (2020) Multiobjective evolution of fuzzy rough neural network via distributed parallelism for stock prediction. IEEE Trans Fuzzy Syst 28(5):939–952
Wang G, Yao Y, Chen Z, Hu P (2019) Thermodynamic and optical analyses of a hybrid solar CPV/T system with high solar concentrating uniformity based on spectral beam splitting technology. Energy 166:256–266
Liu Y, Yang C, Sun Q (2020) Thresholds based image extraction schemes in big data environment in intelligent traffic management. IEEE Trans Intell Transp Syst. https://doi.org/10.1109/TITS.2020.2994386
Liu J, Liu Y, Wang X (2019) An environmental assessment model of construction and demolition waste based on system dynamics: a case study in Guangzhou. Environ Sci Pollut Res. https://doi.org/10.1007/s11356-019-07107-5
Ebrahimi F, Mahesh V (2019) Chaotic dynamics and forced harmonic vibration analysis of magneto-electro-viscoelastic multiscale composite nanobeam. Eng Comput. https://doi.org/10.1007/s00366-019-00865-3
Nadri S, Xie L, Jafari M, Bauwens MF, Arsenovic A, Weikle RM (2019) Measurement and extraction of parasitic parameters of quasi-vertical schottky diodes at submillimeter wavelengths. IEEE Microwave Wirel Compon Lett 29(7):474–476
Nadri S, Xie L, Jafari M, Alijabbari N, Cyberey ME, Barker NS, Lichtenberger AW (2018) Weikle RM A 160 GHz frequency Quadrupler based on heterogeneous integration of GaAs Schottky diodes onto silicon using SU-8 for epitaxy transfer. In: 2018 IEEE/MTT-S International Microwave Symposium-IMS. IEEE, pp 769–772. https://doi.org/10.1109/MWSYM.2018.8439536
Weikle RM, Xie L, Nadri S, Jafari M, Moore CM, Alijabbari N, Cyberey ME, Barker NS, Lichtenberger AW, Brown CL (2019) Submillimeter-wave schottky diodes based on heterogeneous integration of GaAs onto silicon. In: 2019 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM). IEEE, pp 1–2. https://doi.org/10.23919/USNC-URSI-NRSM.2019.8713040
Shariati M, Mafipour MS, Ghahremani B, Azarhomayun F, Ahmadi M, Trung NT, Shariati A (2020) A novel hybrid extreme learning machine–grey wolf optimizer (ELM-GWO) model to predict compressive strength of concrete with partial replacements for cement. Eng Comput. https://doi.org/10.1007/s00366-020-01081-0
Shariati M, Mafipour MS, Mehrabi P, Shariati A, Toghroli A, Trung NT, Salih MN (2020) A novel approach to predict shear strength of tilted angle connectors using artificial intelligence techniques. Eng Comput. https://doi.org/10.1007/s00366-019-00930-x
Shariati A, Ghabussi A, Habibi M, Safarpour H, Safarpour M, Tounsi A, Safa M (2020) Extremely large oscillation and nonlinear frequency of a multi-scale hybrid disk resting on nonlinear elastic foundation. Thin-Walled Struct 154:106840
Safa M, Sari PA, Shariati M, Suhatril M, Trung NT, Wakil K, Khorami M (2020) Development of neuro-fuzzy and neuro-bee predictive models for prediction of the safety factor of eco-protection slopes. Phys A 550:124046
Shariati M, Mafipour MS, Mehrabi P, Ahmadi M, Wakil K, Trung NT, Toghroli A (2020) Prediction of concrete strength in presence of furnace slag and fly ash using Hybrid ANN-GA (Artificial Neural Network-Genetic Algorithm). Smart Struct Syst 25(2):183–195
Armaghani DJ, Mirzaei F, Shariati M, Trung NT, Shariati M, Trnavac D (2020) Hybrid ANN-based techniques in predicting cohesion of sandy-soil combined with fiber. Geomech Eng 20(3):191–205
Shariati M, Mafipour MS, Haido JH, Yousif ST, Toghroli A, Trung NT, Shariati A (2020) Identification of the most influencing parameters on the properties of corroded concrete beams using an Adaptive Neuro-Fuzzy Inference System (ANFIS). Steel Compos Struct 34(1):155–170
Shariati M, Mafipour MS, Mehrabi P, Zandi Y, Dehghani D, Bahadori A, Shariati A, Trung NT, Salih MN, Poi-Ngian S (2019) Application of extreme learning machine (ELM) and genetic programming (GP) to design steel-concrete composite floor systems at elevated temperatures. Steel Compos Struct 33(3):319–332
Katebi J, Shoaei-parchin M, Shariati M, Trung NT, Khorami M (2019) Developed comparative analysis of metaheuristic optimization algorithms for optimal active control of structures. Eng Comput. https://doi.org/10.1007/s00366-019-00780-7
Shariati A, Habibi M, Tounsi A, Safarpour H, Safa M (2020) Application of exact continuum size-dependent theory for stability and frequency analysis of a curved cantilevered microtubule by considering viscoelastic properties. Eng Comput. https://doi.org/10.1007/s00366-020-01024-9
Moayedi H, Hayati S (2018) Applicability of a CPT-based neural network solution in predicting load-settlement responses of bored pile. Int J Geomechanics. https://doi.org/10.1061/(ASCE)GM.1943-5622.0001125
Moayedi H, Bui DT, Foong LK (2019) Slope stability monitoring using novel remote sensing based fuzzy logic. Sensors (Switzerland). https://doi.org/10.3390/s19214636
Moayedi H, Bui DT, Kalantar B, Osouli A, Gör M, Pradhan B, Nguyen H, Rashid ASA (2019) Harris hawks optimization: a novel swarm intelligence technique for spatial assessment of landslide susceptibility. Sensors (Switzerland). https://doi.org/10.3390/s19163590
Moayedi H, Mu’azu MA, Kok Foong L (2019) Swarm-based analysis through social behavior of grey wolf optimization and genetic programming to predict friction capacity of driven piles. Eng Comput. https://doi.org/10.1007/s00366-019-00885-z
Moayedi H, Osouli A, Nguyen H, Rashid ASA (2019) A novel Harris hawks’ optimization and k-fold cross-validation predicting slope stability. Eng Comput. https://doi.org/10.1007/s00366-019-00828-8
Yuan C, Moayedi H (2019) The performance of six neural-evolutionary classification techniques combined with multi-layer perception in two-layered cohesive slope stability analysis and failure recognition. Eng Comput. https://doi.org/10.1007/s00366-019-00791-4
Yuan C, Moayedi H (2019) Evaluation and comparison of the advanced metaheuristic and conventional machine learning methods for the prediction of landslide occurrence. Eng Comput. https://doi.org/10.1007/s00366-019-00798-x
Liu W, Zhang X, Li H, Chen J (2020) Investigation on the deformation and strength characteristics of rock salt under different confining pressures. Geotech Geol Eng. https://doi.org/10.1007/s10706-020-01388-1
Xu W, Qu S, Zhao L, Zhang H (2020) An improved adaptive sliding mode observer for a middle and high-speed rotors tracking. IEEE Trans Power Electron. https://doi.org/10.1109/TPEL.2020.3000785
Qu S, Zhao L, Xiong Z (2020) Cross-layer congestion control of wireless sensor networks based on fuzzy sliding mode control. Neural Comput Appl. https://doi.org/10.1007/s00521-020-04758-1
Zhang H, Qu S, Li H, Luo J, Xu W (2020) A moving shadow elimination method based on fusion of multi-feature. IEEE Access 8:63971–63982
Guo J, Zhang X, Gu F, Zhang H, Fan Y (2020) Does air pollution stimulate electric vehicle sales? Empirical evidence from twenty major cities in China. J Clean Prod 249:119372
Zeng H-B, Teo KL, He Y, Wang W (2019) Sampled-data-based dissipative control of TS fuzzy systems. Appl Math Model 65:415–427
Gao N-S, Guo X-Y, Cheng B-Z, Zhang Y-N, Wei Z-Y, Hou H (2019) Elastic wave modulation in hollow metamaterial beam with acoustic black hole. IEEE Access 7:124141–124146
Gao N, Wei Z, Hou H, Krushynska AO (2019) Design and experimental investigation of V-folded beams with acoustic black hole indentations. J Acoust Soc Am 145(1):EL79–EL83
Chen H, Zhang G, Fan D, Fang L, Huang L (2020) Nonlinear lamb wave analysis for microdefect identification in mechanical structural health assessment. Measurement 164:108026
Song Q, Zhao H, Jia J, Yang L, Lv W, Gu Q, Shu X (2020) Effects of demineralization on the surface morphology, microcrystalline and thermal transformation characteristics of coal. J Anal Appl Pyrol 145:104716
Salah F, Boucham B, Bourada F, Benzair A, Bousahla AA, Tounsi A (2019) Investigation of thermal buckling properties of ceramic-metal FGM sandwich plates using 2D integral plate model. Steel Compos Struct 33(6):805
Batou B, Nebab M, Bennai R, Atmane HA, Tounsi A, Bouremana M (2019) Wave dispersion properties in imperfect sigmoid plates using various HSDTs. Steel Compos Struct 33(5):699
Al-Maliki AF, Ahmed RA, Moustafa NM, Faleh NM (2020) Finite element based modeling and thermal dynamic analysis of functionally graded graphene reinforced beams. Adv Comput Design 5(2):177–193
Lal A, Jagtap KR, Singh BN (2017) Thermo-mechanically induced finite element based nonlinear static response of elastically supported functionally graded plate with random system properties. Adv Comput Design 2(3):165–194
Fantuzzi N, Tornabene F, Bacciocchi M, Dimitri R (2017) Free vibration analysis of arbitrarily shaped Functionally Graded Carbon Nanotube-reinforced plates. Compos B Eng 115:384–408
Chen S, Hassanzadeh-Aghdam M, Ansari R (2018) An analytical model for elastic modulus calculation of SiC whisker-reinforced hybrid metal matrix nanocomposite containing SiC nanoparticles. J Alloy Compd 767:632–641
Ebrahimi F, Rastgo A (2008) An analytical study on the free vibration of smart circular thin FGM plate based on classical plate theory. Thin-Walled Struct 46(12):1402–1408
Ebrahimi F, Rastgoo A (2008) Free vibration analysis of smart annular FGM plates integrated with piezoelectric layers. Smart Mater Struct 17(1):015044
Zhou S, Zhang R, Zhou S, Li A (2019) Free vibration analysis of bilayered circular micro-plate including surface effects. Appl Math Model 70:54–66
Gholami R, Darvizeh A, Ansari R, Pourashraf T (2018) Analytical treatment of the size-dependent nonlinear postbuckling of functionally graded circular cylindrical micro-/nano-shells. Iran J Sci Technol Trans Mech Eng 42(2):85–97
Mohammadimehr M, Emdadi M, Afshari H, Rousta Navi B (2018) Bending, buckling and vibration analyses of MSGT microcomposite circular-annular sandwich plate under hydro-thermo-magneto-mechanical loadings using DQM. Int J Smart Nano Mater 9(4):233–260
Mohammadimehr M, Atifeh SJ, Rousta Navi B (2018) Stress and free vibration analysis of piezoelectric hollow circular FG-SWBNNTs reinforced nanocomposite plate based on modified couple stress theory subjected to thermo-mechanical loadings. J Vib Control 24(15):3471–3486
Sajadi B, Alijani F, Goosen H, van Keulen F (2018) Effect of pressure on nonlinear dynamics and instability of electrically actuated circular micro-plates. Nonlinear Dyn 91(4):2157–2170
Ghabussi A, Ashrafi N, Shavalipour A, Hosseinpour A, Habibi M, Moayedi H, Babaei B, Safarpour H (2019) Free vibration analysis of an electro-elastic GPLRC cylindrical shell surrounded by viscoelastic foundation using modified length-couple stress parameter. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2019.1705166
Wang Z-W, Han Q-F, Nash DH, Liu P-Q (2017) Investigation on inconsistency of theoretical solution of thermal buckling critical temperature rise for cylindrical shell. Thin-Walled Struct 119:438–446
Safarpour H, Hajilak ZE, Habibi M (2019) A size-dependent exact theory for thermal buckling, free and forced vibration analysis of temperature dependent FG multilayer GPLRC composite nanostructures restring on elastic foundation. Int J Mech Mater Design. https://doi.org/10.1007/s10999-018-9431-8
Jermsittiparsert K, Ghabussi A, Forooghi A, Shavalipour A, Habibi M, won Jung D, Safa M (2020) Critical voltage, thermal buckling and frequency characteristics of a thermally affected GPL reinforced composite microdisk covered with piezoelectric actuator. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1748052
Shariati A, Mohammad-Sedighi H, Żur KK, Habibi M, Safa M (2020) Stability and dynamics of viscoelastic moving rayleigh beams with an asymmetrical distribution of material parameters. Symmetry 12(4):586
Mansouri I, Shariati M, Safa M, Ibrahim Z, Tahir M, Petković D (2019) Analysis of influential factors for predicting the shear strength of a V-shaped angle shear connector in composite beams using an adaptive neuro-fuzzy technique. J Intell Manuf 30(3):1247–1257
Shariati M, Mafipour MS, Mehrabi P, Bahadori A, Zandi Y, Salih MN, Nguyen H, Dou J, Song X, Poi-Ngian S (2019) Application of a hybrid artificial neural network-particle swarm optimization (ANN-PSO) model in behavior prediction of channel shear connectors embedded in normal and high-strength concrete. Appl Sci 9(24):5534
Trung NT, Shahgoli AF, Zandi Y, Shariati M, Wakil K, Safa M, Khorami M (2019) Moment-rotation prediction of precast beam-to-column connections using extreme learning machine. Struct Eng Mech 70(5):639–647
Toghroli A, Suhatril M, Ibrahim Z, Safa M, Shariati M, Shamshirband S (2018) Potential of soft computing approach for evaluating the factors affecting the capacity of steel–concrete composite beam. J Intell Manuf 29(8):1793–1801
Chahnasir ES, Zandi Y, Shariati M, Dehghani E, Toghroli A, Mohamad ET, Shariati A, Safa M, Wakil K, Khorami M (2018) Application of support vector machine with firefly algorithm for investigation of the factors affecting the shear strength of angle shear connectors. Smart Struct Syst 22(4):413–424
Sedghi Y, Zandi Y, Toghroli A, Safa M, Mohamad ET, Khorami M, Wakil K (2018) Application of ANFIS technique on performance of C and L shaped angle shear connectors. Smart Struct Syst 22(3):335–340
Ansari R, Torabi J, Hasrati E (2018) Axisymmetric nonlinear vibration analysis of sandwich annular plates with FG-CNTRC face sheets based on the higher-order shear deformation plate theory. Aerosp Sci Technol 77:306–319
Gholami R, Ansari R (2019) Asymmetric nonlinear bending analysis of polymeric composite annular plates reinforced with graphene nanoplatelets. Int J Multiscale Comput Eng 17(1):45–63
Ghayesh MH, Farokhi H, Alici G (2016) Size-dependent performance of microgyroscopes. Int J Eng Sci 100:99–111
Ghayesh MH (2018) Functionally graded microbeams: simultaneous presence of imperfection and viscoelasticity. Int J Mech Sci 140:339–350
Ghayesh MH, Farokhi H (2015) Chaotic motion of a parametrically excited microbeam. Int J Eng Sci 96:34–45
Gholipour A, Farokhi H, Ghayesh MH (2015) In-plane and out-of-plane nonlinear size-dependent dynamics of microplates. Nonlinear Dyn 79(3):1771–1785
Ghayesh MH, Amabili M, Farokhi H (2013) Three-dimensional nonlinear size-dependent behaviour of Timoshenko microbeams. Int J Eng Sci 71:1–14
Ghayesh MH, Farokhi H, Amabili M (2014) In-plane and out-of-plane motion characteristics of microbeams with modal interactions. Compos B Eng 60:423–439
Ghayesh MH, Farokhi H (2015) Nonlinear dynamics of microplates. Int J Eng Sci 86:60–73
Farokhi H, Ghayesh MH (2015) Thermo-mechanical dynamics of perfect and imperfect Timoshenko microbeams. Int J Eng Sci 91:12–33
Zhao X, Li D, Yang B, Ma C, Zhu Y, Chen H (2014) Feature selection based on improved ant colony optimization for online detection of foreign fiber in cotton. Appl Soft Comput 24:585–596
Wang M, Chen H (2020) Chaotic multi-swarm whale optimizer boosted support vector machine for medical diagnosis. Appl Soft Comput 88:105946
Zhao X, Zhang X, Cai Z, Tian X, Wang X, Huang Y, Chen H, Hu L (2019) Chaos enhanced grey wolf optimization wrapped ELM for diagnosis of paraquat-poisoned patients. Comput Biol Chem 78:481–490
Xu X, Chen H-L (2014) Adaptive computational chemotaxis based on field in bacterial foraging optimization. Soft Comput 18(4):797–807
Shen L, Chen H, Yu Z, Kang W, Zhang B, Li H, Yang B, Liu D (2016) Evolving support vector machines using fruit fly optimization for medical data classification. Knowl-Based Syst 96:61–75
Wang M, Chen H, Yang B, Zhao X, Hu L, Cai Z, Huang H, Tong C (2017) Toward an optimal kernel extreme learning machine using a chaotic moth-flame optimization strategy with applications in medical diagnoses. Neurocomputing 267:69–84
Xu Y, Chen H, Luo J, Zhang Q, Jiao S, Zhang X (2019) Enhanced Moth-flame optimizer with mutation strategy for global optimization. Inf Sci 492:181–203
Chen H, Zhang Q, Luo J, Xu Y, Zhang X (2020) An enhanced Bacterial Foraging Optimization and its application for training kernel extreme learning machine. Appl Soft Comput 86:105884
Krysko V Jr, Awrejcewicz J, Dobriyan V, Papkova I, Krysko V (2019) Size-dependent parameter cancels chaotic vibrations of flexible shallow nano-shells. J Sound Vib 446:374–386
Ghayesh MH, Farokhi H, Farajpour A (2019) Chaos in fluid-conveying NSGT nanotubes with geometric imperfections. Appl Math Model 74:708–730
Karimiasl M (2019) Chaotic dynamics of a non-autonomous nonlinear system for a smart composite shell subjected to the hygro-thermal environment. Microsyst Technol 25(7):2587–2607
Farajpour A, Ghayesh MH, Farokhi H (2020) Local dynamic analysis of imperfect fluid-conveying nanotubes with large deformations incorporating nonlinear damping. J Vibr Control. https://doi.org/10.1177/1077546319889493
Farajpour A, Ghayesh MH, Farokhi H (2018) Size-dependent bifurcations of microtubes conveying fluid flow embedded in a nonlinear elastic medium. In: 21st Australasian Fluid Mechanics Conference Adelaide, Australia 10–13 December 2018
Chen X, Hu J, Peng Z, Yuan C (2017) Bifurcation and chaos analysis of torsional vibration in a PMSM-based driven system considering electromechanically coupled effect. Nonlinear Dyn 88(1):277–292
Farajpour A, Ghayesh MH, Farokhi H (2019) A coupled nonlinear continuum model for bifurcation behaviour of fluid-conveying nanotubes incorporating internal energy loss. Microfluid Nanofluid 23(3):34
Ghayesh MH, Farokhi H, Farajpour A (2019) Viscoelastically coupled in-plane and transverse dynamics of imperfect microplates. Thin-Walled Struct. https://doi.org/10.1016/j.tws.2019.01.048
Wang X, Yuan J, Zhai H (2019) Analysis of bifurcation and chaos of the size-dependent micro–plate considering damage. Nonlinear Eng 8(1):461–469
Farajpour A, Farokhi H, Ghayesh MH (2019) Chaotic motion analysis of fluid-conveying viscoelastic nanotubes. Eur J Mech-A/Solids 74:281–296
Yang J, Zhou T (2019) Bifurcation and chaos of piezoelectric shell reinforced with BNNTs under electro-thermo-mechanical loadings. Acta Mech Solida Sin 32(1):120–132
Krysko VA-J, Papkova I, Krysko V (2019) Chaotic dynamics size-dependent flexible rectangular flat shells, vol 3. IOP Publishing, Bristol, p 032020 (In: Journal of Physics: Conference Series)
Pang R, Xu B, Kong X, Zou D (2018) Seismic fragility for high CFRDs based on deformation and damage index through incremental dynamic analysis. Soil Dyn Earthq Eng 104:432–436
Shariati A, Mohammad-Sedighi H, Żur KK, Habibi M, Safa M (2020) On the vibrations and stability of moving viscoelastic axially functionally graded nanobeams. Materials 13(7):1707
Moayedi H, Habibi M, Safarpour H, Safarpour M, Foong L (2019) Buckling and frequency responses of a graphen nanoplatelet reinforced composite microdisk. Int J Appl Mech. https://doi.org/10.1142/S1758825119501023
Moayedi H, Aliakbarlou H, Jebeli M, Noormohammadiarani O, Habibi M, Safarpour H, Foong L (2020) Thermal buckling responses of a graphene reinforced composite micropanel structure. Int J Appl Mech 12(01):2050010
Shokrgozar A, Safarpour H, Habibi M (2020) Influence of system parameters on buckling and frequency analysis of a spinning cantilever cylindrical 3D shell coupled with piezoelectric actuator. Proc Inst Mech Eng Part C 234(2):512–529
Habibi M, Mohammadi A, Safarpour H, Ghadiri M (2019) Effect of porosity on buckling and vibrational characteristics of the imperfect GPLRC composite nanoshell. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2019.1701490
Habibi M, Mohammadi A, Safarpour H, Shavalipour A (2019) Ghadiri M (2019) Wave propagation analysis of the laminated cylindrical nanoshell coupled with a piezoelectric actuator. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.1697932
Al-Furjan M, Habibi M, Safarpour H (2020) Vibration control of a smart shell reinforced by graphene nanoplatelets. Int J Appl Mech. https://doi.org/10.1142/S1758825120500660
Liu Z, Su S, Xi D (2020) Habibi M (2020) Vibrational responses of a MHC viscoelastic thick annular plate in thermal environment using GDQ method. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1784201
Shi X, Li J (2020) Habibi M (2020) On the statics and dynamics of an electro-thermo-mechanically porous GPLRC nanoshell conveying fluid flow. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1772088
Habibi M, Safarpour M, Safarpour H (2020) Vibrational characteristics of a FG-GPLRC viscoelastic thick annular plate using fourth-order Runge-Kutta and GDQ methods. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1779086
Al-Furjan M, Safarpour H, Habibi M, Safarpour M, Tounsi A (2020) A comprehensive computational approach for nonlinear thermal instability of the electrically FG-GPLRC disk based on GDQ method. Eng Comput. https://doi.org/10.1007/s00366-020-01088-7
Zhang X, Shamsodin M, Wang H, Noormohammadi Arani O, Khan AM, Habibi M, Al-Furjan M (2020) Dynamic information of the time-dependent tobullian biomolecular structure using a high-accuracy size-dependent theory. J Biomol Struct Dyn. https://doi.org/10.1080/07391102.2020.1760939
Cheshmeh E, Karbon M, Eyvazian A, Jung D, Tran T, Habibi M, Safarpour M (2020) Buckling and vibration analysis of FG-CNTRC plate subjected to thermo-mechanical load based on higher-order shear deformation theory. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1744005
Najaafi N, Jamali M, Habibi M, Sadeghi S, Jung D, Nabipour N (2020) Dynamic instability responses of the substructure living biological cells in the cytoplasm environment using stress-strain size-dependent theory. J Biomol Struct Dyn. https://doi.org/10.1080/07391102.2020.1751297
Oyarhossein MA, Aa A, Habibi M, Makkiabadi M, Daman M, Safarpour H, Jung DW (2020) Dynamic response of the nonlocal strain-stress gradient in laminated polymer composites microtubes. Sci Rep 10(1):5616. https://doi.org/10.1038/s41598-020-61855-w
Shamsaddini Lori E, Ebrahimi F, Elianddy Bin Supeni E, Habibi M, Safarpour H (2020) The critical voltage of a GPL-reinforced composite microdisk covered with piezoelectric layer. Eng Comput. https://doi.org/10.1007/s00366-020-01004-z
Moayedi H, Ebrahimi F, Habibi M, Safarpour H, Foong LK (2020) Application of nonlocal strain–stress gradient theory and GDQEM for thermo-vibration responses of a laminated composite nanoshell. Eng Comput. https://doi.org/10.1007/s00366-020-01002-1
Safarpour M, Ebrahimi F, Habibi M, Safarpour H (2020) On the nonlinear dynamics of a multi-scale hybrid nanocomposite disk. Eng Comput. https://doi.org/10.1007/s00366-020-00949-5
Shokrgozar A, Ghabussi A, Ebrahimi F, Habibi M, Safarpour H (2020) Viscoelastic dynamics and static responses of a graphene nanoplatelets-reinforced composite cylindrical microshell. Mech Based Design Struct Mach. https://doi.org/10.1080/15397734.2020.1719509
Ebrahimi F, Supeni EEB, Habibi M, Safarpour H (2020) Frequency characteristics of a GPL-reinforced composite microdisk coupled with a piezoelectric layer. Eur Phys J Plus 135(2):144
Ebrahimi F, Hashemabadi D, Habibi M, Safarpour H (2019) Thermal buckling and forced vibration characteristics of a porous GNP reinforced nanocomposite cylindrical shell. Microsyst Technol. https://doi.org/10.1007/s00542-019-04542-9
Adamian A, Safari KH, Sheikholeslami M, Habibi M, Al-Furjan M, Chen G (2020) Critical temperature and frequency characteristics of GPLs-reinforced composite doubly curved panel. Appl Sci 10(9):3251
Moayedi H, Darabi R, Ghabussi A, Habibi M, Foong LK (2020) Weld orientation effects on the formability of tailor welded thin steel sheets. Thin-Walled Struct 149:106669
Ghabussi A, Marnani JA, Rohanimanesh MS (2020) Improving seismic performance of portal frame structures with steel curved dampers. In: Structures. Elsevier, Amsterdam, pp 27–40
Safarpour M, Ghabussi A, Ebrahimi F, Habibi M, Safarpour H (2020) Frequency characteristics of FG-GPLRC viscoelastic thick annular plate with the aid of GDQM. Thin-Walled Struct 150:106683
Ghabussi A, Habibi M, NoormohammadiArani O, Shavalipour A, Moayedi H, Safarpour H (2020) Frequency characteristics of a viscoelastic graphene nanoplatelet–reinforced composite circular microplate. J Vibr Control. https://doi.org/10.1177/1077546320923930
Al-Furjan MSH, Habibi M, Dw J, Sadeghi S, Safarpour H, Tounsi A, Chen G (2020) A computational framework for propagated waves in a sandwich doubly curved nanocomposite panel. Eng Comput. https://doi.org/10.1007/s00366-020-01130-8
Al-Furjan M, Habibi M, Chen G, Safarpour H, Safarpour M, Tounsi A (2020) Chaotic oscillation of a multi-scale hybrid nano-composites reinforced disk under harmonic excitation via GDQM. Compos Struct 252:112737
Li J, Tang F, Habibi M (2020) Bi-directional thermal buckling and resonance frequency characteristics of a GNP-reinforced composite nanostructure. Eng Comput. https://doi.org/10.1007/s00366-020-01110-y
Shariati M, Toghroli A, Jalali A, Ibrahim Z (2017) Assessment of stiffened angle shear connector under monotonic and fully reversed cyclic loading. In: Proceedings of the 5th International Conference on Advances in Civil, Structural and Mechanical Engineering-CSM
Toghroli A, Shariati M, Karim MR, Ibrahim Z (2017) Investigation on composite polymer and silica fume–rubber aggregate pervious concrete. In: Fifth International Conference on Advances in Civil, Structural and Mechanical Engineering - CSM 2017, Zurich, Switzerland, 02–03 September, 2017. pp 95–99. https://doi.org/10.15224/978-1-63248-132-0-56
Ismail M, Shariati M, Abdul Awal ASM, Chiong CE, Sadeghipour Chahnasir E, Porbar A, Heydari A, Khorami M (2018) Strengthening of bolted shear joints in industrialized ferrocement construction. Steel Compos Struct 28(6):681–690
Nasrollahi S, Maleki S, Shariati M, Marto A, Khorami M (2018) Investigation of pipe shear connectors using push out test. Steel Compos Struct, Int J 27(5):537–543. https://doi.org/10.12989/scs.2018.27.5.537
Nosrati A, Zandi Y, Shariati M, Khademi K, Aliabad MD, Marto A, Mu'azu M, Ghanbari E, Mandizadeh M, Shariati A (2018) Portland cement structure and its major oxides and fineness. Smart Struct Syst 22(4):425–432. https://doi.org/10.12989/sss.2018.22.4.425
Paknahad M, Shariati M, Sedghi Y, Bazzaz M, Khorami M (2018) Shear capacity equation for channel shear connectors in steel-concrete composite beams. Steel Compos Struct 28(4):483–494. https://doi.org/10.12989/scs.2018.28.4.483
Zandi Y, Shariati M, Marto A, Wei X, Karaca Z, Dao D, Toghroli A, Hashemi MH, Sedghi Y, Wakil K (2018) Computational investigation of the comparative analysis of cylindrical barns subjected to earthquake. Steel Compos Struct Int J 28(4):439–447. https://doi.org/10.12989/scs.2018.28.4.439
Nayfeh AH (2011) Introduction to perturbation techniques. Wiley, Hoboken
Kovacic I, Brennan MJ (2011) The Duffing equation: nonlinear oscillators and their behaviour. Wiley, Hoboken
Ebrahimi F, Habibi S (2018) Nonlinear eccentric low-velocity impact response of a polymer-carbon nanotube-fiber multiscale nanocomposite plate resting on elastic foundations in hygrothermal environments. Mech Adv Mater Struct 25(5):425–438
Han J-B, Liew K (1999) Axisymmetric free vibration of thick annular plates. Int J Mech Sci 41(9):1089–1109
Funding
The study was funded by National Natural Science Foundation of China (51675148), The Outstanding Young Teachers Fund of Hangzhou Dianzi University (GK160203201002/003), and National Natural Science Foundation of China (51805475).
Author information
Authors and Affiliations
Corresponding authors
Additional information
This article has been retracted. Please see the retraction notice for more detail: https://doi.org/10.1007/s00366-023-01859-y
Appendix
Appendix
In Eqs. (32a–c), Lij and Mij are expressed as follows:
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Al-Furjan, M.S.H., Habibi, M., rahimi, A. et al. RETRACTED ARTICLE: Chaotic simulation of the multi-phase reinforced thermo-elastic disk using GDQM. Engineering with Computers 38 (Suppl 1), 219–242 (2022). https://doi.org/10.1007/s00366-020-01144-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-020-01144-2