
Abstract
In this research, electrically characteristics of a graphene nanoplatelet (GPL)-reinforced composite (GPLRC) microdisk are explored using generalized differential quadrature method. Also, the current microstructure is coupled with a piezoelectric actuator (PIAC). The extended form of Halpin–Tsai micromechanics is used to acquire the elasticity of the structure, whereas the variation of thermal expansion, Poisson’s ratio, and density through the thickness direction is determined by the rule of mixtures. Hamilton’s principle is implemented to establish governing equations and associated boundary conditions of the GPLRC microdisk joint with PIAC. The compatibility conditions are satisfied by taking perfect bonding between the core and PIAC into consideration. Maxwell’s equation is employed to capture the piezoelectricity effects. The numerical results revealed the important role of ratios of length scale and nonlocal to thickness, outer-to-inner ratio of radius (\(R_{\text{o}} /R_{\text{i}}\)), ratio of piezoelectric to core thickness (hp/h), and GPL weight fraction (\(g_{\text{GPL}}\)) on the critical voltage of the system. Another important consequence is that by increasing \(R_{\text{o}} /R_{\text{i}}\), the critical voltage of the smart structure increases more intensely in comparison with the \(g_{\text{GPL}}\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Reinforced laminated composites are increasingly used in various applications due to its outstanding features, namely high tensile strength, high modulus, and lightweight [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20]. Because of some important requirements in science and technology for promoting the mechanical response and performance of the systems, reinforcing with GPL attracted the attention of numerous researchers for providing an impressive enhancement in the construction of the practical composite structures. Also, frequency response is more important in many applications [21,22,23,24,25,26,27,28,29,30,31]. Suna et al. [32] performed a study to compare the fracture performance of the functionally graded (FG) cemented carbide in the presence and absence of GPL reinforcement. They concluded that the superb properties of GPLs in the content of nanocomposites can be considered as a barrier in the way of growing microcracks. Also, according to the results of an experimental study, Rafiee et al. [33] asserted that the composites reinforced with GPL present more strength in comparison with the structures employing SWCNT, DWCNT, and MWCNT as the reinforcement. In the current decade, exploring the dynamic response of GPL-reinforced nanostructures becomes the hot topic of many surveys as a consequence of remarkable progress in nanotechnologies. In this field of research, the stability and the vibrational response of a thermo-elastic circular plate are analyzed in Refs [11,12,13,14,15,16, 34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59]. Vibration, buckling, wave propagation, and bending responses of the nanocomposite-reinforced structures are investigated in Refs. [60,61,62,63,64,65].
High-speed rotation and exposure to the thermal site are considered as the main assumptions in the mathematical modeling of the system to acquire the critical spinning speed of thermos-whirling circular plates. The impressive effect of damping coefficients on the transient forced oscillation and stability of the FG circular plate with viscoelastic boundary edges is revealed by Alipour [66]. Within the framework of classical theory, Ebrahimi and Rastgoo [67] explored solution methods to analyze the vibration performance of the FG circular plate covered with piezoelectric. As another survey, Ebrahimi and Rastgoo [68] studied flexural natural frequencies of FG annular plate coupled with layers made of piezoelectric materials. Shasha et al. [69] introduce a novel exact model on the basis of surface elasticity and Kirchhoff theory to determine the vibration performance of a double-layered microcircular plate. The surface effect is captured in their model as the main novelty. The results obtained with the aid of their modified model showed that the vibration performance of the double-layered microstructure is quite higher than the single-layered one. On the basis of FSD theory, Mohammadimehr et al. [70] conducted a numerical study in the dynamic and static stability performance of a composite circular plate by implementing GDQM. Moreover, they considered the thermo-magnet field to define the sandwich structure model. As another work, Mohammadimehr et al. [71] applied DQM in the framework of MCS to describe stress filed and scrutinize the dynamic stability of an FG boron nitride nanotubes-reinforced circular plate. They claimed that using reinforcement in a higher volume fraction promotes the strength and vibration response of the structure. Nonlinear oscillation and stability of microcircular plates subjected to electrical field actuation and mechanical force are studied by Sajadi et al. [72]. They concluded that pure mechanical load plays a more dominant role on the stability characteristics of the structure in comparison with electromechanical load. Also, they confirmed the positive impact of AC or DC voltage on the stability of the system in different cases of application. In order to determine the critical angular speed of spinning circular shell coupled with sensor at its end, Safarpour et al. [36] applied GDQM to analyze forced and free oscillatory responses of the structure on the base of thick shell theory. Through a theoretical approach, Wang et al. [73] obtained critical temperature and thermal load of a nanocircular shell. Safarpour et al. [44] introduced a numerical technique with high accuracy to study the static stability, forced and free vibration performance of a nanosized FG circular shell in exposure to thermal site. In addition, some researchers showed that some geometrical and physical parameters have important role on the stability or instability of the structures [36,37,38,39, 40,41,42,43,44,45,46,47,48,49,50,51,52, 54, 74,75,77]. Based on the NSG theory, the nonlocal effects on the dynamic and static responses of the micro/nanostructure are presented in Refs. [61, 78,79,80,81,82,83,84,85].
Wang et al. [86] reported the nonlinear dynamic performance of size-dependent circular plates with the piezoelectric actuator in the exposure of a thermal site with the aid of MCS incorporated with surface elasticity theory to consider the size effects. They highlighted the considerable effect of geometrical nonlinearity on the dynamic characteristics of the system. By employing FSDT, NSGT, DQM, and Hamilton’s principle, Mahinzare et al. [87] presented a comprehensive parametric investigation in the size-dependent vibration performance of FG circular plate by considering the electro-elastic, thermal, and rotational effects. They showed the considerable impact of spinning velocity on the natural frequencies of nanosized systems. In another investigation, the same authors [88] studied the size-dependent vibration response of a spinning two-directional FG circular plate integrated with the PIAC on the basis of DQM, Hamilton’s principle, and FSDT. The results confirmed the high dependency of the dynamic performance of the circular plate to spinning load and external applied voltage. In a huge number of researches [79, 89,90,91,92,93,94,95,96], the results of nonlocal elasticity compared with those results by nonlocal strain gradient elasticity.
None of the published articles focused on analyzing the electrically analysis of the GPLRC microdisk joint with PIAC using NSGT. In this survey, the extended model of Halpin–Tsai micromechanics is applied to determine the elastic characteristics of the composite structure. A numerical approach is employed to solve differential governing motion equations for different cases of boundary conditions. Eventually, a complete parametric study is carried out to reveal the impact of \(R_{\text{o}} /R_{\text{i}}\), h/hp, applied voltage, and \(g_{\text{GPL}}\) on the critical voltage response of the GPLRC microdisk integrated with PIAC.
2 GPLRC microdisk
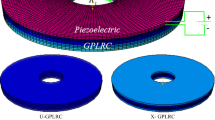
A GPLRC microdisk and coupled with the PIAC is depicted in Fig. 1. The volume fraction for four patterns is described by a specific function as expressed follows [97]:

GPLRC microdisk covered with piezoelectric layer
The parameters participated in Eqs. (1–4) are introduced in Ref. [97] in detail. The explicit relation between \(V_{\text{GPL}}^{*}\) and \(g_{\text{GPL}}\) can be described by:
in which \(\rho_{\text{GPL}}\) and \(\rho_{\text{m}}\) are corresponding mass density of GPL and polymer matrix, respectively. The effective elastic modulus of the structure is approximated with the extended model of Halpin–Tsai micromechanics [98]
Also, \(\xi_{L} = 2\frac{{L_{\text{GPL}} }}{{t_{\text{GPL}} }}\), \(\xi_{W} = 2\frac{{w_{\text{GPL}} }}{{t_{\text{GPL}} }}\), \(\eta_{L} = \frac{{\left( {{\raise0.7ex\hbox{${E_{\text{GPL}} }$} \!\mathord{\left/ {\vphantom {{E_{\text{GPL}} } {E_{M} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${E_{M} }$}}} \right) - 1}}{{\left( {{\raise0.7ex\hbox{${E_{\text{GPL}} }$} \!\mathord{\left/ {\vphantom {{E_{\text{GPL}} } {E_{M} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${E_{M} }$}}} \right) + \xi_{L} }}\) and \(\eta_{W} = \frac{{\left( {{\raise0.7ex\hbox{${E_{\text{GPL}} }$} \!\mathord{\left/ {\vphantom {{E_{\text{GPL}} } {E_{M} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${E_{M} }$}}} \right) - 1}}{{\left( {{\raise0.7ex\hbox{${E_{\text{GPL}} }$} \!\mathord{\left/ {\vphantom {{E_{\text{GPL}} } {E_{M} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${E_{M} }$}}} \right) + \xi_{W} }}\). Finally, by utilizing the well-known rule of mixture, corresponding Poisson’s ratio \(\nu_{c}\) and mass density \(\rho_{c}\) of the microcomposite consisted of GNP and polymer are approximated as:
2.1 Displacement fields in the circular plate
HOSD theory is chosen to define the corresponding displacement fields of the GPLRC disk according to the subsequent relation [82, 83, 90, 99,100,101,102,103,104,105,106,107,108,109,110,111]:
Based on the conventional form of HOSDT [112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129], c1 is equal to 4/3h2.
2.2 Strain–stress of core
According to HOSDT, one can formulate the strain–stress relations as follows:
and strain components would be written as:
2.3 Piezoelectric displacement fields
On the basis of HOSDT, the piezoelectric microdisk displacement fields can be obtained as follows:
2.4 Strain–stress of piezoelectric
The corresponding stress and strain tensors of the PIACs are associated with each other according to the following equations:
where sim, emij, and Qij in order stand for the dielectric and piezoelectric constants, and elasticity matrix. Em and Di indicate electric fields strength and electric displacements of the piezoelectric disk, respectively. Corresponding electric and magnetic field strength, i.e., Ex, Eθ, Ez, which are participated in Eqs. (12) and (13), would be formulated as:
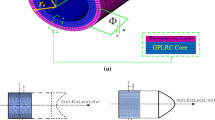
Wang [130] explored that the electric potential (\(\Phi (x,\theta ,z,t)\)) can be accounted as:
in which β = π/h and \(\phi_{0}\) stands for the initial external electric.
2.5 E-compatibility equations
Following relations present mathematical expression for the conditions of compatibility taking perfect bonding between the core and PIAC section and taken into consideration at \(z_{\text{p}} = - h_{\text{p}} /2\):
Based on Eq. (16), the displacement-dependent parameters are related to each other in the PIAC as follows:
2.6 Extended Hamilton’s principle
In order to acquire the governing equations and related boundary conditions, we can utilize Hamilton’s principle as follows:
the following relation describes the components involved in the process of obtaining the strain energy of the aforementioned microdisk:
where
The first variation of the external work applied by an external electrical load to the structure can be obtained as follows [51]:
where N Pi represents the external electric load which could be acquired as follows:
Eventually, differential equations of motion of the microstructure are extracted as follows:
where
and
Moreover, the parameters involved in the equation of the PIAC can be given as follows:
It should be noticed that based on the compatibility relation (Eq. 16), the number of corresponding unknown variables of the core is declined from 5 to 3. Thus, the total number of unknowns in the piezoelectric face sheet and the GPLRC core is reduced to 8.
2.7 NSG theory
In the present article, the size-dependent effects are captured in the mathematical model through NSG theory. According to the theory, corresponding stain and stress tensors of microstructure are correlated with each order as follows:
where \(\nabla^{2} = \partial^{2} /\partial \theta^{2} + \partial /R\partial \theta\), \(C_{ijck}\), \(\varepsilon_{ck}\), and \(t_{ij}\) are tensors of elasticity, strain, and stress of NSGT, respectively. According to NSGT, the tensor of stress would be presented by the subsequent relation [43]:
Based on Eq. (29), the extended form of the relation between stress and strain would be expressed as follows [131]:
Thus, the governing differential equations of motion of the microdisk in thermal environment joint with the PIAC are derived as follows:
Eventually, the related boundary conditions would be formulated as follows:
The governing equations of the smart microstructure are presented in the Appendix section.
2.8 Solution procedure
In order to explore the vibration performance of the microdisk in this survey, a numerical solution approach based on the well-known GDQM is followed. According to this method, the nth-order derivatives of a smooth function f would be obtained by the following expression [132]:
The weighting coefficients associated with nth-order derivative along the radius direction is defined as C(n). From Eq. (33), it is apparent that calculating the weighting coefficients is the essential parts of DQM. To estimate the nth-order derivatives of function along radius direction, two forms of DQM developed of GDQM are adopted in this study. Thus, the weighting coefficients are computed from the first-order derivative which is shown as
here,
Likewise, the weighting coefficients for higher-order derivatives can be calculated using the shown expressions.
Currently, in this research, a non-uniform batch of seeds is chosen in r axis which is shown as:
Considering the linear motion equations of the structure, we can obtain the total stiffness as follows:
where the subscripts b and d represent the boundary and domain grid points, respectively. Moreover, \(\delta\) denotes the vector of displacements. Equation (38) would be transformed into a standard form of eigenvalue problem:
2.9 Convergencey
A sufficient number of elements and grid points are essential for obtaining the accurate results in FEM and GDQM [55,56,57,58,59, 133,134,135,136,137,138,139,140,141,142,143,144,145,145]. To guarantee an acceptable accuracy in the results of GDQM, it is crucial to find a sufficient number of grid points. Accordingly, the convergence study is performed for different cases of boundary conditions and also hp/h ratio. As shown in Table 1, N = 17 as the number of grid points can provide the sufficient accuracy of GDQM results.
2.10 Validation
Numerical results from Table 3, for an isotropic circular plate and different geometrical parameters, were varied with those Ref. [146], to examine the efficiency and validity approach for this study. The maximal discrepancy, as entailed by the reconciliation reported in the table, is relatively 1% (Table 2).
3 Results
A GPL with a thickness of hGNP= 1.5 nm and radius of RGNP = 0.75 μm is used and presented in Table 3. It should be mentioned that the corresponding properties of piezoelectric material are provided in Table 4.
Figures 2, 3, and 4 show \(g_{\text{GPL}}\) and GPLRC pattern’s effects on the critical voltage of the microdisk under various boundary conditions.

Effects of different values and various distribution patterns of the GPL on the critical voltage of the GPLRC microdisk covered with a piezoelectric layer for simply–simply boundary conditions

Effects of different values and various distribution patterns of the GPL on the critical voltage of the GPLRC microdisk covered with a piezoelectric layer for clamped–simply boundary conditions

Effects of different values and various distribution patterns of the GPL on the critical voltage of the GPLRC microdisk covered with a piezoelectric layer for clamped–clamped boundary conditions
As a typical result which can label Figs. 2, 3, and 4, for S–S, C–S, and C–C boundary conditions and each GPLRC pattern, there is a direct or positive effect from on the critical voltage of the smart microdisk. According to these figures, the best pattern of the GPRC microdisk for having the highest critical voltage at all ranges of the parameter is pattern 3. For all patterns, the relation between parameter and critical voltage is linear, and when the boundary conditions are considered S–S, patterns 4 and 1 have not shown any effect on the critical voltage of the structure. As an astonishing result from Figs. 2, 3, and 4, when the boundary conditions change from S–S to C–C, the influence of GPL pattern on the critical voltage of the smart circular structure in all ranges of the parameter decreases.
Figures 5, 6, and 7 show the effects of different values of \(g_{\text{GPL}}\) and \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameters on the critical voltage of the smart microdisk.

Effects of different values of \(g_{\text{GPL}}\) and \({h \mathord{\left/{\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) on the critical voltage of the GPLRC microdisk covered with a piezoelectric sensor for simply–simply boundary conditions

Effects of different values of \(g_{\text{GPL}}\) and \({h \mathord{\left/{\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) on the critical voltage of the GPLRC microdisk covered with a piezoelectric sensor for clamped–simply boundary conditions

Effects of different values of \(g_{\text{GPL}}\) and \({h \mathord{\left/{\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) on the critical voltage of the GPLRC microdisk covered with a piezoelectric sensor for clamped–clamped boundary conditions
Accordion to Figs. 5, 6, and 7, for a specific value of the \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameter and all boundary conditions, by increasing the value of the \(g_{\text{GPL}}\), critical voltage of the structure increases linearly. As an astonishing result for the literature, there is a positive and direct relation between \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) and critical voltage of the structure. As a conclusion from Figs. 5, 6, and 7, when the rigidity of the structure increased, the influences of the \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameter on the critical voltage decrease. Besides, having an exact glance to these figures can find out an interesting result which as well as the positive effect from \(g_{\text{GPL}}\) on the critical voltage, by increasing \(g_{\text{GPL}}\) the positive impact of \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameter on the critical voltage of the structure has been intensified. For greater \(g_{\text{GPL}}\) parameter, the effect of \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameter on the critical voltage is more significant in comparison with at the lower value of it.
The main point of Table 5 is a presentation about the influences of the length scale (l/h) and Ro/h parameters on the critical voltage of the simply supported microcircular plate covered with a piezoelectric sensor. According to Table 5, as well as an indirect effect from Ro/h parameter on the frequency, increasing the length scale parameter encounters the structure with a weakness in the dynamic stability of the structure. By having an exact glance at Table 5, the negative effect from Ro/h on the critical voltage of the smart circular plate is much more remarkable in comparison with the same impact from the length scale parameter on the natural property of the structure. As a useful suggestion for applied nanoindustries, by dedicating exact attention to Table 5 can conclude that the highest critical voltage of the composite microdisk is seen when the GPLRC pattern is considered as pattern 1. More on this research, Figs. 8, 9, and 10 have an interview about the impacts of the \(g_{\text{GPL}}\) and \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) parameters on the critical voltage of the smart GPLRC microdisk. Correspondent to Figs. 8, 9, and 10, it would be a relevant result which both of \(g_{\text{GPL}}\) and \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) parameters have an enhancing effect on the static response or critical voltage of the microstructure. It is evident that the relation between \(g_{\text{GPL}}\) and critical voltage is direct and linear. In contrast, the relation between \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) and critical voltage is exponential, polynomial, and exponential for S–S, C–C, and C–S. For more comprehensive, it would be a useful suggestion for the literature, and by increasing the \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\), critical voltage of the smart structure increases more intensely in comparison with the \(g_{\text{GPL}}\).

Effects of \(g_{\text{GPL}}\) and \({{R_{\text{o}} } \mathord{\left/{\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) parameters on the critical voltage of the GPLRC microdisk covered with piezoelectric sensor for simply–simply boundary conditions

Effects of \(g_{\text{GPL}}\) and \({{R_{\text{o}} } \mathord{\left/{\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) parameters on the critical voltage of the GPLRC microdisk covered with piezoelectric sensor for clamped–simply boundary conditions

Effects of \(g_{\text{GPL}}\) and \({{R_{\text{o}} } \mathord{\left/{\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\) parameters on the critical voltage of the GPLRC microdisk covered with piezoelectric sensor for clamped–clamped boundary conditions
4 Conclusion
For the first time, electrically responses of a GPLRC-reinforced microdisk covered with PIAC were explored using the GDQ method and NSG theory. The compatibility conditions were extracted by assuming perfect bonding at the contact interface of the PIAC and the core. Also, the piezoelectricity of the face sheet is modeled with the aid of Maxwell’s equation. The results displayed that \(\Delta T\), \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\), different patterns of GPLs, and \(g_{\text{GPL}}\) have significant impact on the critical voltage responses of the GPLRC microdisk. The main results are that:
-
Changing from S–S to C–C, the influence of GPL pattern on the critical voltage decreases.
-
At the greater \(g_{\text{GPL}}\) parameter, the effect of \({h \mathord{\left/ {\vphantom {h {R_{\text{o}} }}} \right. \kern-0pt} {R_{\text{o}} }}\) parameter on the critical voltage is more significant in comparison with the lower value of it.
-
By increasing the hp/h, the critical voltage of the GPLRC microdisk covered with PIAC increases.
-
By increasing \({{R_{\text{o}} } \mathord{\left/ {\vphantom {{R_{\text{o}} } {R_{\text{i}} }}} \right. \kern-0pt} {R_{\text{i}} }}\), the critical voltage of the smart structure increases more intensely in comparison with the \(g_{\text{GPL}}\).
References
Safarpour M, Ghabussi A, Ebrahimi F, Habibi M, Safarpour H (2020) Frequency characteristics of FG-GPLRC viscoelastic thick annular plate with the aid of GDQM. Thin Walled Struct 150:106683
Safarpour M, Ebrahimi F, Habibi M, Safarpour H (2020) On the nonlinear dynamics of a multi-scale hybrid nanocomposite disk. Eng Comput. https://doi.org/10.1007/s00366-020-00949-5
Moayedi H, Habibi M, Safarpour H, Safarpour M, Foong L (2020) Buckling and frequency responses of a graphene nanoplatelet reinforced composite microdisk. Int J Appl Mech. https://doi.org/10.1142/S1758825119501023
Safarpour M, Rahimi A, Alibeigloo A (2019) Static and free vibration analysis of graphene platelets reinforced composite truncated conical shell, cylindrical shell, and annular plate using theory of elasticity and DQM. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1646137
Shahgholian-Ghahfarokhi D, Safarpour M, Rahimi A (2019) Torsional buckling analyses of functionally graded porous nanocomposite cylindrical shells reinforced with graphene platelets (GPLs). Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1666723
Bisheh H, Alibeigloo A, Safarpour M, Rahimi A (2019) Three-dimensional static and free vibrational analysis of graphene reinforced composite circular/annular plate using differential quadrature method. Int J Appl Mech 11:1950073
Safarpour M, Rahimi A, Alibeigloo A, Bisheh H, Forooghi A (2019) Parametric study of three-dimensional bending and frequency of FG-GPLRC porous circular and annular plates on different boundary conditions. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1701491
Rahimi A, Alibeigloo A, Safarpour M (2020) Three-dimensional static and free vibration analysis of graphene platelet–reinforced porous composite cylindrical shell. J Vib Control. https://doi.org/10.1177/1077546320902340
Wang Y, Zeng R, Safarpour M (2020) Vibration analysis of FG-GPLRC annular plate in a thermal environment. Mech Based Des Struct Mach 1–19
Shahgholian D, Safarpour M, Rahimi A, Alibeigloo A (2020) Buckling analyses of functionally graded graphene-reinforced porous cylindrical shell using the Rayleigh–Ritz method. Acta Mech 1–16
Qiao W, Yang Z, Kang Z, Pan Z (2020) Short-term natural gas consumption prediction based on Volterra adaptive filter and improved whale optimization algorithm. Eng Appl Artif Intell 87:103323
Qiao W, Yang Z (2019) Forecast the electricity price of US using a wavelet transform-based hybrid model. Energy 163:116704. https://doi.org/10.1016/j.energy.2019.116704
Qiao W, Yang Z (2019) Solving large-scale function optimization problem by using a new metaheuristic algorithm based on quantum dolphin swarm algorithm. IEEE Access 7:138972–138989
Qiao W, Tian W, Tian Y, Yang Q, Wang Y, Zhang J (2019) The forecasting of PM2. 5 using a hybrid model based on wavelet transform and an improved deep learning algorithm. IEEE Access 7:142814–142825
Qiao W, Yang Z (2019) Modified dolphin swarm algorithm based on chaotic maps for solving high-dimensional function optimization problems. IEEE Access 7:110472–110486
Qiao W, Huang K, Azimi M, Han S (2019) A novel hybrid prediction model for hourly gas consumption in supply side based on improved machine learning algorithms. IEEE Access 7:88218–88230. https://doi.org/10.1109/ACCESS.2019.2918156
Derazkola HA, Eyvazian A, Simchi A (2020) Modeling and experimental validation of material flow during FSW of polycarbonate. Mater Today Commun 22:100796
Eyvazian A, Hamouda A, Tarlochan F, Derazkola HA, Khodabakhshi F (2020) Simulation and experimental study of underwater dissimilar friction-stir welding between aluminium and steel. J Mater Res Technol. https://doi.org/10.1016/j.jmrt.2020.02.003
Eyvazian A, Hamouda AM, Aghajani Derazkola H, Elyasi M (2020) Study on the effects of tool tile angle, offset and plunge depth on friction stir welding of poly (methyl methacrylate) T-joint. Proc Inst Mech Eng Part B J Eng Manuf 234:773–787
Derazkola HA, Eyvazian A, Simchi A (2020) Submerged friction stir welding of dissimilar joints between an Al–Mg alloy and low carbon steel: thermo-mechanical modeling, microstructural features, and mechanical properties. J Manuf Process 50:68–79
Nadri S, Xie L, Jafari M, Alijabbari N, Cyberey ME, Barker NS et al (2018) A 160 GHz frequency quadrupler based on heterogeneous integration of GaAs Schottky diodes onto silicon using SU-8 for epitaxy transfer. In: 2018 IEEE/MTT-S international microwave symposium-IMS, 2018, pp 769–772
Jafari M, Moradi G, Shirazi RS, Mirzavand R (2017) Design and implementation of a six-port junction based on substrate integrated waveguide. Turk J Electr Eng Comput Sci 25:2547–2553
Alkhatib SE, Tarlochan F, Eyvazian A (2017) Collapse behavior of thin-walled corrugated tapered tubes. Eng Struct 150:674–692
Hedayati R, Ziaei-Rad S, Eyvazian A, Hamouda AM (2014) Bird strike analysis on a typical helicopter windshield with different lay-ups. J Mech Sci Technol 28:1381–1392
Mozafari H, Eyvazian A, Hamouda AM, Crupi V, Epasto G, Gugliemino E (2018) Numerical and experimental investigation of corrugated tubes under lateral compression. Int J Crashworthiness 23:461–473
Eyvazian A, Akbarzadeh I, Shakeri M (2012) Experimental study of corrugated tubes under lateral loading. Proc Inst Mech Eng Part L J Mater Des Appl 226:109–118
Eyvazian A, Habibi MK, Hamouda AM, Hedayati R (2014) Axial crushing behavior and energy absorption efficiency of corrugated tubes. Mater Des 1980–2015(54):1028–1038
Eyvazian A, Tran T, Hamouda AM (2018) Experimental and theoretical studies on axially crushed corrugated metal tubes. Int J Non Linear Mech 101:86–94
Dastjerdi AA, Shahsavari H, Eyvazian A, Tarlochan F (2019) Crushing analysis and multi-objective optimization of different length bi-thin walled cylindrical structures under axial impact loading. Eng Optim 51:1884–1901
Sadighi A, Eyvazian A, Asgari M, Hamouda AM (2019) A novel axially half corrugated thin-walled tube for energy absorption under axial loading. Thin Walled Struct 145:106418
Eyvazian A, Taghizadeh SA, Hamouda AM, Tarlochan F, Moeinifard M, Gobbi M (2019) Buckling and crushing behavior of foam-core hybrid composite sandwich columns under quasi-static edgewise compression. J Sandw Struct Mater. https://doi.org/10.1177/1099636219894665
Sun J, Zhao J (2018) Multi-layer graphene reinforced nano-laminated WC-Co composites. Mater Sci Eng A 723:1–7
Rafiee MA, Rafiee J, Wang Z, Song H, Yu Z-Z, Koratkar N (2009) Enhanced mechanical properties of nanocomposites at low graphene content. ACS Nano 3:3884–3890
Zhong R, Wang Q, Tang J, Shuai C, Qin B (2018) Vibration analysis of functionally graded carbon nanotube reinforced composites (FG-CNTRC) circular, annular and sector plates. Compos Struct 194:49–67
Yang Y, Wang Z, Wang Y (2018) Thermoelastic coupling vibration and stability analysis of rotating circular plate in friction clutch. J Low Freq Noise Vib Active Control 38:558–573. https://doi.org/10.1177/1461348418817465
Ghabussi A, Ashrafi N, Shavalipour A, Hosseinpour A, Habibi M, Moayedi H et al (2019) Free vibration analysis of an electro-elastic GPLRC cylindrical shell surrounded by viscoelastic foundation using modified length-couple stress parameter. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1705166
Habibi M, Mohammadi A, Safarpour H, Ghadiri M (2019) Effect of porosity on buckling and vibrational characteristics of the imperfect GPLRC composite nanoshell. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1701490
Habibi M, Mohammadi A, Safarpour H, Shavalipour A, Ghadiri M (2019) Wave propagation analysis of the laminated cylindrical nanoshell coupled with a piezoelectric actuator. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1697932
Ebrahimi F, Mohammadi K, Barouti MM, Habibi M (2019) Wave propagation analysis of a spinning porous graphene nanoplatelet-reinforced nanoshell. Waves Random Complex Media. https://doi.org/10.1080/17455030.2019.1694729
Shokrgozar A, Safarpour H, Habibi M (2019) Influence of system parameters on buckling and frequency analysis of a spinning cantilever cylindrical 3D shell coupled with piezoelectric actuator. Proc Inst Mech Eng Part C J Mech Eng Sci 234(2):512–529. https://doi.org/10.1177/0954406219883312
Habibi M, Taghdir A, Safarpour H (2019) Stability analysis of an electrically cylindrical nanoshell reinforced with graphene nanoplatelets. Compos B Eng 175:107125
Mohammadgholiha M, Shokrgozar A, Habibi M, Safarpour H (2019) Buckling and frequency analysis of the nonlocal strain–stress gradient shell reinforced with graphene nanoplatelets. J Vib Control 25:2627–2640
Ebrahimi F, Habibi M, Safarpour H (2019) On modeling of wave propagation in a thermally affected GNP-reinforced imperfect nanocomposite shell. Eng Comput 35:1375–1389
Safarpour H, Hajilak ZE, Habibi M (2019) A size-dependent exact theory for thermal buckling, free and forced vibration analysis of temperature dependent FG multilayer GPLRC composite nanostructures restring on elastic foundation. Int J Mech Mater Des 15:569–583
Hashemi HR, Alizadeh AA, Oyarhossein MA, Shavalipour A, Makkiabadi M, Habibi M (2019) Influence of imperfection on amplitude and resonance frequency of a reinforcement compositionally graded nanostructure. Waves Random Complex Media. https://doi.org/10.1080/17455030.2019.1662968
Ebrahimi F, Hashemabadi D, Habibi M, Safarpour H (2019) Thermal buckling and forced vibration characteristics of a porous GNP reinforced nanocomposite cylindrical shell. Microsyst Technol 26:1–13. https://doi.org/10.1007/s00542-019-04542-9
Mohammadi A, Lashini H, Habibi M, Safarpour H (2019) Influence of viscoelastic foundation on dynamic behaviour of the double walled cylindrical inhomogeneous micro shell using MCST and with the aid of GDQM. J Solid Mech 11:440–453
Habibi M, Hashemabadi D, Safarpour H (2019) Vibration analysis of a high-speed rotating GPLRC nanostructure coupled with a piezoelectric actuator. Eur Phys J Plus 134:307
Pourjabari A, Hajilak ZE, Mohammadi A, Habibi M, Safarpour H (2019) Effect of porosity on free and forced vibration characteristics of the GPL reinforcement composite nanostructures. Comput Math Appl 77:2608–2626
Habibi M, Mohammadgholiha M, Safarpour H (2019) Wave propagation characteristics of the electrically GNP-reinforced nanocomposite cylindrical shell. J Braz Soc Mech Sci Eng 41:221
Safarpour H, Pourghader J, Habibi M (2019) Influence of spring-mass systems on frequency behavior and critical voltage of a high-speed rotating cantilever cylindrical three-dimensional shell coupled with piezoelectric actuator. J Vib Control 25:1543–1557
Ebrahimi F, Hajilak ZE, Habibi M, Safarpour H (2019) Buckling and vibration characteristics of a carbon nanotube-reinforced spinning cantilever cylindrical 3D shell conveying viscous fluid flow and carrying spring-mass systems under various temperature distributions. Proc Inst Mech Eng Part C J Mech Eng Sci 233:4590–4605
Esmailpoor Hajilak Z, Pourghader J, Hashemabadi D, Sharifi Bagh F, Habibi M, Safarpour H (2019) Multilayer GPLRC composite cylindrical nanoshell using modified strain gradient theory. Mech Based Des Struct Mach 45:521–545
Safarpour H, Ghanizadeh SA, Habibi M (2018) Wave propagation characteristics of a cylindrical laminated composite nanoshell in thermal environment based on the nonlocal strain gradient theory. Eur Phys J Plus 133:532
Gao W, Dimitrov D, Abdo H (2018) Tight independent set neighborhood union condition for fractional critical deleted graphs and ID deleted graphs. Discrete Contin Dyn Syst S 12:711–721
Gao W, Guirao JLG, Basavanagoud B, Wu J (2018) Partial multi-dividing ontology learning algorithm. Inf Sci 467:35–58
Gao W, Wang W, Dimitrov D, Wang Y (2018) Nano properties analysis via fourth multiplicative ABC indicator calculating. Arab J Chem 11:793–801
Gao W, Wu H, Siddiqui MK, Baig AQ (2018) Study of biological networks using graph theory. Saudi J Biol Sci 25:1212–1219
Gao W, Guirao JLG, Abdel-Aty M, Xi W (2019) An independent set degree condition for fractional critical deleted graphs. Discrete Contin Dyn Syst S 12:877–886
Medani M, Benahmed A, Zidour M, Heireche H, Tounsi A, Bousahla AA et al (2019) Static and dynamic behavior of (FG-CNT) reinforced porous sandwich plate using energy principle. Steel Compos Struct 32:595–610
Karami B, Shahsavari D, Janghorban M, Tounsi A (2019) Resonance behavior of functionally graded polymer composite nanoplates reinforced with graphene nanoplatelets. Int J Mech Sci 156:94–105
Draoui A, Zidour M, Tounsi A, Adim B (2019) Static and dynamic behavior of nanotubes-reinforced sandwich plates using (FSDT). J Nano Res 57:117–135. https://doi.org/10.4028/www.scientific.net/JNanoR.57.117
Bakhadda B, Bouiadjra MB, Bourada F, Bousahla AA, Tounsi A, Mahmoud S (2018) Dynamic and bending analysis of carbon nanotube-reinforced composite plates with elastic foundation. Wind Struct 27:311–324
Eyvazian A, Hamouda AM, Tarlochan F, Mohsenizadeh S, Dastjerdi AA (2019) Damping and vibration response of viscoelastic smart sandwich plate reinforced with non-uniform graphene platelet with magnetorheological fluid core. Steel Compos Struct 33:891
Motezaker M, Eyvazian A (2020) Post-buckling analysis of Mindlin cut out-plate reinforced by FG-CNTs. Steel Compos Struct 34:289
Alipour M (2018) Transient forced vibration response analysis of heterogeneous sandwich circular plates under viscoelastic boundary support. Arch Civ Mech Eng 18:12–31
Ebrahimi F, Rastgo A (2008) An analytical study on the free vibration of smart circular thin FGM plate based on classical plate theory. Thin Walled Struct 46:1402–1408
Ebrahimi F, Rastgoo A (2008) Free vibration analysis of smart annular FGM plates integrated with piezoelectric layers. Smart Mater Struct 17:015044
Zhou S, Zhang R, Zhou S, Li A (2019) Free vibration analysis of bilayered circular micro-plate including surface effects. Appl Math Model 70:54–66
Mohammadimehr M, Emdadi M, Afshari H, Rousta Navi B (2018) Bending, buckling and vibration analyses of MSGT microcomposite circular-annular sandwich plate under hydro-thermo-magneto-mechanical loadings using DQM. Int J Smart Nano Mater 9:233–260
Mohammadimehr M, Atifeh SJ, Rousta Navi B (2018) Stress and free vibration analysis of piezoelectric hollow circular FG-SWBNNTs reinforced nanocomposite plate based on modified couple stress theory subjected to thermo-mechanical loadings. J Vib Control 24:3471–3486
Sajadi B, Alijani F, Goosen H, van Keulen F (2018) Effect of pressure on nonlinear dynamics and instability of electrically actuated circular micro-plates. Nonlinear Dyn 91:2157–2170
Wang Z-W, Han Q-F, Nash DH, Liu P-Q (2017) Investigation on inconsistency of theoretical solution of thermal buckling critical temperature rise for cylindrical shell. Thin Walled Struct 119:438–446
Shokrgozar A, Ghabussi A, Ebrahimi F, Habibi M, Safarpour H (2020) Viscoelastic dynamics and static responses of a graphene nanoplatelets-reinforced composite cylindrical microshell. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2020.1719509
Ebrahimi F, Supeni EEB, Habibi M, Safarpour H (2020) Frequency characteristics of a GPL-reinforced composite microdisk coupled with a piezoelectric layer. Eur Phys J Plus 135:144
Moayedi H, Aliakbarlou H, Jebeli M, Noormohammadi Arani O, Habibi M, Safarpour H et al (2019) Thermal buckling responses of a graphene reinforced composite micropanel structure. Int J Appl Mech. https://doi.org/10.1142/S1758825120500106
Esmailpoor Hajilak Z, Pourghader J, Hashemabadi D, Sharifi Bagh F, Habibi M, Safarpour H (2019) Multilayer GPLRC composite cylindrical nanoshell using modified strain gradient theory. Mech Based Des Struct Mach 47:521–545
Karami B, Janghorban M, Tounsi A (2019) Galerkin’s approach for buckling analysis of functionally graded anisotropic nanoplates/different boundary conditions. Eng Comput 35:1297–1316
Alimirzaei S, Mohammadimehr M, Tounsi A (2019) Nonlinear analysis of viscoelastic micro-composite beam with geometrical imperfection using FEM: MSGT electro-magneto-elastic bending, buckling and vibration solutions. Struct Eng Mech 71:485–502
Karami B, Janghorban M, Tounsi A (2019) Wave propagation of functionally graded anisotropic nanoplates resting on Winkler–Pasternak foundation. Struct Eng Mech 70:55–66
Karami B, Janghorban M, Tounsi A (2019) On exact wave propagation analysis of triclinic material using three-dimensional bi-Helmholtz gradient plate model. Struct Eng Mech 69:487–497
Karami B, Janghorban M, Shahsavari D, Tounsi A (2018) A size-dependent quasi-3D model for wave dispersion analysis of FG nanoplates. Steel Compos Struct 28:99–110
Karami B, Janghorban M, Tounsi A (2018) Nonlocal strain gradient 3D elasticity theory for anisotropic spherical nanoparticles. Steel Compos Struct 27:201–216
Karami B, Janghorban M, Tounsi A (2018) Variational approach for wave dispersion in anisotropic doubly-curved nanoshells based on a new nonlocal strain gradient higher order shell theory. Thin Walled Struct 129:251–264
Karami B, Janghorban M, Tounsi A (2017) Effects of triaxial magnetic field on the anisotropic nanoplates. Steel Compos Struct 25:361–374
Wang K, Wang B, Zhang C (2017) Surface energy and thermal stress effect on nonlinear vibration of electrostatically actuated circular micro-/nanoplates based on modified couple stress theory. Acta Mech 228:129–140
Mahinzare M, Alipour MJ, Sadatsakkak SA, Ghadiri M (2019) A nonlocal strain gradient theory for dynamic modeling of a rotary thermo piezo electrically actuated nano FG circular plate. Mech Syst Signal Process 115:323–337
Mahinzare M, Ranjbarpur H, Ghadiri M (2018) Free vibration analysis of a rotary smart two directional functionally graded piezoelectric material in axial symmetry circular nanoplate. Mech Syst Signal Process 100:188–207
Berghouti H, Adda Bedia E, Benkhedda A, Tounsi A (2019) Vibration analysis of nonlocal porous nanobeams made of functionally graded material. Adv Nano Res 7:351–364
Boutaleb S, Benrahou KH, Bakora A, Algarni A, Bousahla AA, Tounsi A et al (2019) Dynamic analysis of nanosize FG rectangular plates based on simple nonlocal quasi 3D HSDT. Adv Nano Res 7:191
Hamza-Cherif R, Meradjah M, Zidour M, Tounsi A, Belmahi S, Bensattalah T (2018) Vibration analysis of nano beam using differential transform method including thermal effect. J Nano Res 54:1–14. https://doi.org/10.4028/www.scientific.net/JNanoR.54.1
Youcef DO, Kaci A, Benzair A, Bousahla AA, Tounsi A (2018) Dynamic analysis of nanoscale beams including surface stress effects. Smart Struct Syst 21:65–74
Bouadi A, Bousahla AA, Houari MSA, Heireche H, Tounsi A (2018) A new nonlocal HSDT for analysis of stability of single layer graphene sheet. Adv Nano Res 6:147
Bellifa H, Benrahou KH, Bousahla AA, Tounsi A, Mahmoud S (2017) A nonlocal zeroth-order shear deformation theory for nonlinear postbuckling of nanobeams. Struct Eng Mech 62:695–702
Bounouara F, Benrahou KH, Belkorissat I, Tounsi A (2016) A nonlocal zeroth-order shear deformation theory for free vibration of functionally graded nanoscale plates resting on elastic foundation. Steel Compos Struct 20:227–249
Al-Basyouni K, Tounsi A, Mahmoud S (2015) Size dependent bending and vibration analysis of functionally graded micro beams based on modified couple stress theory and neutral surface position. Compos Struct 125:621–630
Song M, Kitipornchai S, Yang J (2017) Free and forced vibrations of functionally graded polymer composite plates reinforced with graphene nanoplatelets. Compos Struct 159:579–588
De Villoria RG, Miravete A (2007) Mechanical model to evaluate the effect of the dispersion in nanocomposites. Acta Mater 55:3025–3031
Liu W, Zhang Z, Chen J, Jiang D, Fei W, Fan J, Li Y (2020) Feasibility evaluation of large-scale underground hydrogen storage in bedded salt rocks of China: a case study in Jiangsu province. Energy 9:117348. https://doi.org/10.1016/j.energy.2020.117348
Bouhadra A, Tounsi A, Bousahla AA, Benyoucef S, Mahmoud S (2018) Improved HSDT accounting for effect of thickness stretching in advanced composite plates. Struct Eng Mech 66:61–73
Zarga D, Tounsi A, Bousahla AA, Bourada F, Mahmoud S (2019) Thermomechanical bending study for functionally graded sandwich plates using a simple quasi-3D shear deformation theory. Steel Compos Struct 32:389–410
Boukhlif Z, Bouremana M, Bourada F, Bousahla AA, Bourada M, Tounsi A et al (2019) A simple quasi-3D HSDT for the dynamics analysis of FG thick plate on elastic foundation. Steel Compos Struct 31:503–516
Boulefrakh L, Hebali H, Chikh A, Bousahla AA, Tounsi A, Mahmoud S (2019) The effect of parameters of visco-Pasternak foundation on the bending and vibration properties of a thick FG plate. Geomech Eng 18:161–178
Mahmoudi A, Benyoucef S, Tounsi A, Benachour A, Adda Bedia EA, Mahmoud S (2019) A refined quasi-3D shear deformation theory for thermo-mechanical behavior of functionally graded sandwich plates on elastic foundations. J Sandw Struct Mater 21:1906–1929
Zaoui FZ, Ouinas D, Tounsi A (2019) New 2D and quasi-3D shear deformation theories for free vibration of functionally graded plates on elastic foundations. Compos B Eng 159:231–247
Younsi A, Tounsi A, Zaoui FZ, Bousahla AA, Mahmoud S (2018) Novel quasi-3D and 2D shear deformation theories for bending and free vibration analysis of FGM plates. Geomech Eng 14:519–532
Benchohra M, Driz H, Bakora A, Tounsi A, Adda Bedia E, Mahmoud S (2018) A new quasi-3D sinusoidal shear deformation theory for functionally graded plates. Struct Eng Mech 65:19–31
Abualnour M, Houari MSA, Tounsi A, Mahmoud S (2018) A novel quasi-3D trigonometric plate theory for free vibration analysis of advanced composite plates. Compos Struct 184:688–697
Atmane HA, Tounsi A, Bernard F (2017) Effect of thickness stretching and porosity on mechanical response of a functionally graded beams resting on elastic foundations. Int J Mech Mater Des 13:71–84
Draiche K, Tounsi A, Mahmoud S (2016) A refined theory with stretching effect for the flexure analysis of laminated composite plates. Geomech Eng 11:671–690
Bousahla AA, Houari MSA, Tounsi A, Adda Bedia EA (2014) A novel higher order shear and normal deformation theory based on neutral surface position for bending analysis of advanced composite plates. Int J Comput Methods 11:1350082
Chaabane LA, Bourada F, Sekkal M, Zerouati S, Zaoui FZ, Tounsi A et al (2019) Analytical study of bending and free vibration responses of functionally graded beams resting on elastic foundation. Struct Eng Mech 71:185–196
Bourada F, Bousahla AA, Bourada M, Azzaz A, Zinata A, Tounsi A (2019) Dynamic investigation of porous functionally graded beam using a sinusoidal shear deformation theory. Wind Struct 28:19–30
Liu W, Zhang X, Fan J, Li Y, Wang L (2020) Evaluation of potential for salt cavern gas storage and integration of brine extraction: cavern utilization, Yangtze River Delta region. Nat Resour Res. https://doi.org/10.1007/s11053-020-09640-4
Meksi R, Benyoucef S, Mahmoudi A, Tounsi A, Adda Bedia EA, Mahmoud S (2019) An analytical solution for bending, buckling and vibration responses of FGM sandwich plates. J Sandw Struct Mater 21:727–757
Bourada F, Amara K, Bousahla AA, Tounsi A, Mahmoud S (2018) A novel refined plate theory for stability analysis of hybrid and symmetric S-FGM plates. Struct Eng Mech 68:661–675
Zine A, Tounsi A, Draiche K, Sekkal M, Mahmoud S (2018) A novel higher-order shear deformation theory for bending and free vibration analysis of isotropic and multilayered plates and shells. Steel Compos Struct 26:125–137
Fourn H, Atmane HA, Bourada M, Bousahla AA, Tounsi A, Mahmoud S (2018) A novel four variable refined plate theory for wave propagation in functionally graded material plates. Steel Compos Struct 27:109–122
Attia A, Bousahla AA, Tounsi A, Mahmoud S, Alwabli AS (2018) A refined four variable plate theory for thermoelastic analysis of FGM plates resting on variable elastic foundations. Struct Eng Mech 65:453–464
Chikh A, Tounsi A, Hebali H, Mahmoud S (2017) Thermal buckling analysis of cross-ply laminated plates using a simplified HSDT. Smart Struct Syst 19:289–297
Menasria A, Bouhadra A, Tounsi A, Bousahla AA, Mahmoud S (2017) A new and simple HSDT for thermal stability analysis of FG sandwich plates. Steel Compos Struct 25:157–175
El-Haina F, Bakora A, Bousahla AA, Tounsi A, Mahmoud S (2017) A simple analytical approach for thermal buckling of thick functionally graded sandwich plates. Struct Eng Mech 63:585–595
Abdelaziz HH, Meziane MAA, Bousahla AA, Tounsi A, Mahmoud S, Alwabli AS (2017) An efficient hyperbolic shear deformation theory for bending, buckling and free vibration of FGM sandwich plates with various boundary conditions. Steel Compos Struct 25:693–704
Bellifa H, Bakora A, Tounsi A, Bousahla AA, Mahmoud S (2017) An efficient and simple four variable refined plate theory for buckling analysis of functionally graded plates. Steel Compos Struct 25:257–270
Fahsi A, Tounsi A, Hebali H, Chikh A, Adda Bedia E, Mahmoud S (2017) A four variable refined nth-order shear deformation theory for mechanical and thermal buckling analysis of functionally graded plates. Geomech Eng 13:385–410
Bousahla AA, Benyoucef S, Tounsi A, Mahmoud S (2016) On thermal stability of plates with functionally graded coefficient of thermal expansion. Struct Eng Mech 60:313–335
Boukhari A, Atmane HA, Tounsi A, Adda Bedia E, Mahmoud S (2016) An efficient shear deformation theory for wave propagation of functionally graded material plates. Struct Eng Mech 57:837–859
Beldjelili Y, Tounsi A, Mahmoud S (2016) Hygro-thermo-mechanical bending of S-FGM plates resting on variable elastic foundations using a four-variable trigonometric plate theory. Smart Struct Syst 18:755–786
Attia A, Tounsi A, Bedia E, Mahmoud S (2015) Free vibration analysis of functionally graded plates with temperature-dependent properties using various four variable refined plate theories. Steel Compos Struct 18:187–212
Wang Q (2002) On buckling of column structures with a pair of piezoelectric layers. Eng Struct 24:199–205
Reddy JN (2004) Mechanics of laminated composite plates and shells: theory and analysis. CRC Press, Boca Raton
Shu C (2012) Differential quadrature and its application in engineering. Springer, Berlin
Moayedi H, Darabi R, Ghabussi A, Habibi M, Foong LK (2020) Weld orientation effects on the formability of tailor welded thin steel sheets. Thin Walled Struct 149:106669
Ghazanfari A, Soleimani SS, Keshavarzzadeh M, Habibi M, Assempuor A, Hashemi R (2019) Prediction of FLD for sheet metal by considering through-thickness shear stresses. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1662310
Alipour M, Torabi MA, Sareban M, Lashini H, Sadeghi E, Fazaeli A et al (2019) Finite element and experimental method for analyzing the effects of martensite morphologies on the formability of DP steels. Mech Based Des Struct Mach. https://doi.org/10.1080/15397734.2019.1633343
Hosseini S, Habibi M, Assempour A (2018) Experimental and numerical determination of forming limit diagram of steel–copper two-layer sheet considering the interface between the layers. Modares Mech Eng 18:174–181
Habibi M, Hashemi R, Ghazanfari A, Naghdabadi R, Assempour A (2018) Forming limit diagrams by including the M–K model in finite element simulation considering the effect of bending. Proc Inst Mech Eng Part L J Mater Des Appl 232:625–636
Habibi M, Payganeh G (2018) Experimental and finite element investigation of titanium tubes hot gas forming and production of square cross-section specimens. Aerosp Mech J 14:89–99
Habibi M, Hashemi R, Tafti MF, Assempour A (2018) Experimental investigation of mechanical properties, formability and forming limit diagrams for tailor-welded blanks produced by friction stir welding. J Manuf Process 31:310–323
Habibi M, Ghazanfari A, Assempour A, Naghdabadi R, Hashemi R (2017) Determination of forming limit diagram using two modified finite element models. Mech Eng 48:141–144
Ghazanfari A, Assempour A, Habibi M, Hashemi R (2016) Investigation on the effective range of the through thickness shear stress on forming limit diagram using a modified Marciniak–Kuczynski model. Modares Mech Eng 16:137–143
Habibi M, Hashemi R, Sadeghi E, Fazaeli A, Ghazanfari A, Lashini H (2016) Enhancing the mechanical properties and formability of low carbon steel with dual-phase microstructures. J Mater Eng Perform 25:382–389
Fazaeli A, Habibi M, Ekrami A (2016) Experimental and finite element comparison of mechanical properties and formability of dual phase steel and ferrite–pearlite steel with the same chemical composition. Metall Eng 19(2):84–93
Shamloofard M, Assempour A (2019) Development of an inverse isogeometric methodology and its application in sheet metal forming process. Appl Math Model 73:266–284
Shamloofard M, Movahhedy MR (2015) Development of thermo-elastic tapered and spherical superelements. Appl Math Comput 265:380–399
Han J-B, Liew K (1999) Axisymmetric free vibration of thick annular plates. Int J Mech Sci 41:1089–1109
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The governing equations of the structure are presented as follows:
The GDQ form can be given as follows:
Rights and permissions
About this article

Cite this article
Shamsaddini Lori, E., Ebrahimi, F., Elianddy Bin Supeni, E. et al. The critical voltage of a GPL-reinforced composite microdisk covered with piezoelectric layer. Engineering with Computers 37, 3489–3508 (2021). https://doi.org/10.1007/s00366-020-01004-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-020-01004-z