
Abstract
This paper is concerned with the global Mittag-Leffler synchronization schemes for the Caputo type fractional-order BAM neural networks with multiple time-varying delays and impulsive effects. Based on the delayed-feedback control strategy and Lyapunov functional approach, the sufficient conditions are established to ensure the global Mittag-Leffler synchronization, which are described as the algebraic inequalities associated with the network parameters. The control gain constants can be searched in a wider range following the proposed synchronization conditions. The obtained results are more general and less conservative. A numerical example is also presented to illustrate the feasibility and effectiveness of the theoretical results based on the modified predictor–corrector algorithm.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus was firstly proposed by Leibniz in 1695 (see [1, 2] and references therein). As a natural generalization of the classical calculus, the subject of fractional calculus has attracted much interest and attention from a lot of scholars and researchers. Because the fractional-order operators have the nonlocal feature and weakly singular kernels, the fractional-order models can provide a powerful tool to characterize the hereditary and memory properties of various phenomena and processes such as viscoelastic materials [3], market dynamics [4], physics [5], diffusion [6], control systems [7] and biological systems [8] and so on.
As we all know, the stability problem is a very important performance measure for any dynamical system. Recently, the various kinds of stability problems for fractional-order differential systems including Mittag-Leffler stability [9], asymptotic stability [10] and uniform stability [11] have been widely discussed. For example, Li et al. [9] investigated the Mittag-Leffler stability and generalized Mittag-Leffler stability of nonlinear fractional-order dynamic systems based on Lyapunov direct method and Mittag-Leffler function. Li et al. [12] discussed the global Mittag-Leffler stability of coupled system of fractional-order differential equations on network by using graph theory and the Lyapunov method. Wu et al. [13] proposed linear state feedback control law and partial state feedback control law to Mittag-Leffler stabilize the fractional-order BAM neural networks based on Lyapunov approach. On the other hand, time delay phenomenon is almost an inevitable problem in the practical systems, which often has an important on the dynamics of systems [14]. Liu et al. [15] investigated the Mittag-Leffler stability of nonlinear fractional neutral singular systems under Caputo and Riemann–Liouville derivatives.
In the past few decades, the neural networks were extensively applied to solve some signal processing, image processing and optimal control problems including cellular neural networks [16], Hopfield neural networks [17], recurrent neural networks [18, 19], Cohen-Grossberg neural networks [20], bidirectional associative memory (BAM) neural networks [21], and complex-valued neural networks [19, 22,23,24] and so on. In 1987, Kosko first introduced the double layers BAM neural network models (see [25]). The remarkable feature of BAM neural networks contains the close relation of the neurons between the U-layer and V-layer. That is, the neurons in one layer are fully interconnected to the one in the other layer, but there are not any interconnection among neurons in the same layer. Recently, we note that the fractional-order operators have been introduced to neural networks to establish the fractional-order neural networks by many researchers in [26,27,28,29,30,31,32]. Compared with the integer-order neural network models, the fractional-order ones could better describe the dynamical behaviors of the neurons. Many important results have been presented with regard to the various classes of stability analysis of fractional-order neural networks such as uniform stability [26, 29], delay-independent stability [27], finite-time stability [28], asymptotic stability [30, 31] and Mittag-Leffler stability [32].
The synchronization of dynamical systems mainly refers to a dynamical process wherein many chaotic systems modify a given property of their motion to a common behaviour due to a coupling or to a forcing. In [33,34,35,36,37,38,39,40,41], the authors discussed the various synchronization schemes for the integer-order network systems such as exponential synchronization [33, 34], adaptive synchronization [35], finite-time synchronization [36, 37], fixed-time synchronization [38], cluster synchronization [39], pinning-controlled synchronization [40] and impulsive synchronization [41]. It is worth mentioning that many researchers have been devoted to investigating the synchronization problems for fractional-order neural networks [42,43,44] and fractional-order delayed neural networks [32, 45,46,47,48,49,50]. The various effective control approaches have been applied to deal with synchronization problems concerning the integer-order or fractional-order neural networks such as distributed control [39], impulsive control [40], linear feedback control [42, 45], sliding model control [43, 44], adaptive feedback control [46, 47], adaptive pinning control [48] and linear delay feedback control [49]. Many real systems in physics, engineering, chemistry, biology, and information science, may experience abrupt changes as certain instants. This kind of impulsive behaviors can be modelled by impulsive systems [21, 22, 30, 32, 51]. For instance, Stamova [32] studied the global Mittag-Leffler synchronization of impulsive fractional-order neural networks with time-varying delays, while the interconnection effects of the neurons between U-layer and V-layer were not involved in the network model. Chen et al. [42] discussed the global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks, in which the impulsive effects and delay factor are not been considered. Rajivganthi et al. [47] discussed the adaptive synchronization and finite-time synchronization of Caputo fractional-order memristor-based BAM delayed neural networks, yet the impulsive effects are not been taken into account.
Compared with the advances of the integer-order delayed neural networks [16,17,18,19,20,21,22,23,24, 33,34,35,36,37,38,39,40,41], the research on the dynamical behaviours of fractional-order delayed neural networks is still at the stage of developing and exploiting [32, 45,46,47,48,49,50]. To the best of our knowledge, there are few results on the fractional-order BAM neural networks with multiple time-varying delays and impulsive effects. Motivated by the above discussions, this paper will consider the global Mittag-Leffler synchronization for Caputo fractional-order neural networks with multiple time-varying delays and impulsive effects. The main challenges and contributions of this paper are summarized as follows:
-
The differentiability of the neuron activation functions and time-varying delay functions in the addressed system are not necessarily required. The presented results are less conservative and more general.
-
The considered BAM network includes impulsive effects, multiple time-varying delays, fractional-order derivative and the interconnection effects of the neurons between U-layer and V-layer and so on. We sufficiently take into account the impact of these factors on the synchronization schemes of the network systems.
-
The delayed-feedback control strategy and Lyapunov functional approach are applied to derive global Mittag-Leffler synchronization conditions between fractional master system and slave system. The control gain constants can be searched in a wider range following the Mittag-Leffler synchronization conditions.
-
The global Mittag-Leffler synchronization conditions are described as the algebraic inequalities, which are concise and easy to test. The numerical simulations of an illustrative example are presented to show the validity and feasibility of the theoretical results based on the modified predictor–corrector algorithm [52].
2 Preliminaries and Model Description
In this section, we recall some definitions and related properties of fractional calculus. Moreover, a class of Caputo type fractional-order bidirectional associative memory (BAM) neural network models with multiple time-varying delays and impulsive effects is presented.
Definition 2.1
[2] The Riemann–Liouville fractional integral of order q for a function f is defined as:
where \(q>0, t\geqslant t_0\). The Gamma function \(\Gamma (q)\) is defined by the integral
The composition property with Riemann–Liouville fractional integral can be described by
The Caputo fractional operator often plays a key role in the dynamics analysis of fractional-order systems, and the expression form of the initial value problems is similar to integer-order systems. Therefore, we deal with fractional-order BAM delayed neural networks with Caputo derivative in this paper , whose definition and properties are given below.
Definition 2.2
[2] The Caputo fractional derivative of order q for a function f is defined as
where \(0\leqslant m-1<q<m, m\in {\mathbb {Z}}^{+}\). Particularly, for \(0<\alpha <1\) case, one can get
According to Definition 2.2, for any constants \(L_1\in {\mathbb {R}}\) and \(L_2\in {\mathbb {R}}\), the linearity of Caputo’s fractional derivative is described by
In this paper, we are devoted to discussing a class of Caputo type fractional-order BAM neural networks with multiple time-varying delays and impulsive effects described by the states equations
There are two layers \(U=\{x_1, x_2, \ldots , x_n\}\) and \(V=\{y_1, y_2, \ldots , y_m\}\) in the fractional network system (1); \(x_i(t)\) and \(y_j(t)\) denote the membrane voltages of i-th neuron in the U-layer and the membrane voltages of j-th neuron in the V-layer, respectively; \(_{0}^{C}D_{t}^{\alpha } x_i(\cdot )\) denotes the order \(\alpha \) Caputo type fractional derivatives of \(x_i(\cdot )\) with \(0<\alpha <1\); \(a_i>0\) and \({\overline{a}}_j>0\) mean the decay coefficients of signals from neurons \(x_i\) to \(y_j\); \(f_i(\cdot )\) and \(g_j(\cdot )\) are the activation functions for neurons; \(b_{ij}, c_{ij}, {\overline{b}}_{ji}\) and \({\overline{c}}_{ji}\) represent the weight coefficients of the neurons; \(I_i\) and \({\overline{I}}_j\) denote external input of U-layer and V-layer, respectively; \(\tau _{ij}(t)\) and \(\sigma _{ji}(t)\) are the transmission time-varying delays at time t from neuron to another; Moreover, the impulsive moments \(\big \{t_k|k=1,2,\ldots \big \}\) satisfy \(0=t_0<t_1<t_2<\cdots<t_k<\cdots ,\ t_k\rightarrow +\infty \) as \(k\rightarrow +\infty \), and
\(x_i(t_k^+)\) and \(x_i(t_k^-)\) represent the right and left limits of \(x_i(t)\) at \(t=t_k\), respectively; \(x_i(t_k^-)=x_i(t_k)\) and \(y_j(t_k^-)=y_j(t_k)\) imply that \(x_i(t)\) and \(y_j(t)\) are both left continuous at \(t=t_k\). Correspondingly, the state vector of fractional-order network system can be denoted by
Throughout this paper, we make the following assumption conditions.
H1 The neuron activation functions \(f_i(\cdot )\) and \(g_j(\cdot )\) are Lipschitz continuous. That is, there exist positive constants \(L_i^f, L_j^g\in {\mathbb {R}}^+\) such that
where \(L_i^f, L_j^g\in {\mathbb {R}}^+\) are Lipschitz constants.
H2 The impulsive operators \(\gamma _{k}^{(1)}(\cdot )\) and \(\gamma _{k}^{(2)}(\cdot )\) satisfy
where \(\lambda _{ik}^{(1)}\in (0,2)\ (i=1,2,\ldots , n;\ k=1,2,\ldots ),\) and \(\lambda _{jk}^{(2)}\in (0,2)\ (j=1,2,\ldots , m;\ k=1,2,\ldots )\).
H3 The variable delay functions \(\tau _{ij}(\cdot )\) and \(\sigma _{ji}(\cdot )\) are continuous and bounded on the interval \([0,+\infty )\). That is, there exists a positive constant \(\tau {>}0\) such that \( \tau _{ij}(t), \sigma _{ji}(t)\in [0,\tau ].\)
The main advantage of Caputo derivative is that the initial conditions for Caputo fractional-order differential equations take on the same expression form as the integer-order differential equations (see [1, 2]). Therefore, the initial conditions associated with Caputo type fractional-order BAM network system (1) can be expressed as:
where \(\varphi _i(t),\ \phi _j(t)\) denote the real-valued piecewise continuous functions defined on \([-\tau ,0]\) with the norm given by
In order to realize the global Mittag-Leffler synchronization between fractional-order master neural network and slave neural network, we refer to fractional-order network system (1) as the master system, and fractional-order slave system is described as the following form:
with the initial conditions \({\overline{x}}_i(t)={\overline{\varphi }}_i(t), \ {\overline{y}}_j(t)={\overline{\phi }}_j(t),\ t\in [-\tau ,0].\)
Let \(e_i(t)={\overline{x}}_i(t)-x_i(t),\ {\overline{e}}_j(t)={\overline{y}}_j(t)-y_j(t)\ (i=1,2,\ldots ,n;\ j=1,2,\ldots ,m)\) be the synchronization errors. From fractional master system (1) and fractional slave system (6), we can obtain fractional error system
where \(g_j\big ({\overline{e}}_j(t)\big )=g_j\big ({\overline{y}}_j(t)\big )-g_j\big (y_j(t)\big ),\ f_i\big (e_i(t)\big )=f_i\big (x_i(t)\big )-f_i\big (x_i(t)\big )\).
Similar to the discussions of the equilibrium solution to integer-order differential systems, noting that Caputo fractional-order derivative of a nonzero constant is equal to zero, then we can define the equilibrium solution of system (1) as follows:
Definition 2.3
A constant vector \(({x^*}^T,{y^*}^T)^T=(x_1^*, x_2^*,\ldots , x_n^*, y_1^*, y_2^*, \ldots , y_m^* )^T\in {\mathbb {R}}^{n+m}\) is an equilibrium solution of system (1) if and only if \(x^*=(x_1^*, x_2^*,\ldots , x_n^*)^T\) and \(y^*=(y_1^*, y_2^*,\ldots , y_m^*)^T\) satisfy the following equations:
and the impulsive jumps \(\gamma _{k}^{(1)}\Big (x_i(t_k)\Big )\) and \(\gamma _{k}^{(2)}\Big (y_j(t_k)\Big )\) satisfy
In what follows, we introduce the definition of global Mittag-Leffler synchronization and a basic lemma, which will be used to the proof of the main results.
Definition 2.4
Fractional master system (1) achieves global Mittag-Leffler synchronization with fractional slave system (6) under the control inputs \(u_i(t)\) and \(v_j(t)\), if and only if there exist two positive constants \(\lambda >0\) and \(M\geqslant 1\) such that fractional error system (7) satisfies the following inequality
where \((\varphi ,\phi )\) and \(({\overline{\varphi }}, {\overline{\phi }})\) are different initial values of master system (1) and slave system (6), respectively.
Lemma 2.1
[42] Let V(t) be a continuous function on \([0,+\infty )\) and satisfies
where \(0<\alpha <1\) and \(\lambda \) is a constant. Then
Remark 2.1
The main purpose of this paper is devoted to investigating the global Mittag-Leffler synchronization problem for Caputo type fractional-order BAM delayed neural networks. It should be pointed out that the differentiability of the neuron activation functions \(f_i(\cdot ), g_j(\cdot )\) and time-varying delay functions \(\tau _{ij}(\cdot ), \sigma _{ji}(\cdot )\) in system (1) are not necessarily required.
Remark 2.2
The remarkable feature of BAM neural networks includes the complex relations of the neurons between the U-layer and V-layer. Several factors such as the multiple time-varying delays, impulsive effects and fractional order derivative \(\alpha \in (0,1)\) bring the significant challenge to the analysis of dynamical behaviours. In this paper, a delayed-feedback control strategy will be designed to overcome these difficulties to achieve global Mittag-Leffler synchronization between fractional master system (1) and fractional slave system (6).
3 Global Mittag-Leffler Synchronization Schemes
In this section, we discuss the global Mittag-Leffler synchronization schemes for fractional-order BAM neural networks with multiple variable delays and impulsive effects. By designing a set of delayed feedback controllers, the global Mittag-Leffler synchronization between fractional master system (1) and fractional slave system (6) is achieved based on fractional calculus theory and Lyapunov functional approach.
Choosing the delay-feedback control strategy for fractional slave system (6) by the following forms:
where \( \eta _i>0, \ {\overline{\eta }}_j>0,\ \beta >0\) are all control gains to be determined, and \(\text {sgn}(\cdot )\) denotes the sign function.
Combining fractional error system (7) with the linear feedback controllers (9) and condition (H2) yields the following fractional error system

where \(g_j\big ({\overline{e}}_j(t)\big )=g_j\big ({\overline{y}}_j(t)\big )-g_j\big (y_j(t)\big ),\ f_i\big (e_i(t)\big )=f_i\big ({\overline{x}}_i(t)\big )-f_i\big (x_i(t)\big )\), \(\lambda _{ik}^{(1)}\in (0,2),\ \lambda _{jk}^{(2)}\in (0,2).\)
According to Definition 2.3, we immediately know that \((e_i^{\ *},{\overline{e}}_j^{\ *})^T=(0,0,\ldots ,0)^T\in {\mathbb {R}}^{n+m}\) is an equilibrium solution of error system (10). The impulsive operators also satisfy
In what follows, the global Mittag-Leffler synchronization results are derived between fractional master system (1) and fractional slave system (6) based on the delayed feedback controllers (9).
Theorem 3.1
Suppose that the conditions (H1)–(H3) hold, then fractional master system (1) can achieve Mittag-Leffler synchronization with fractional slave system (4) under the delayed feedback controllers (9), if there exist two positive constants \(\omega _1, \omega _2\) such that \(\omega _2>\omega _1>0\), where
Proof
Suppose \(\big (x^T(t),y^T(t)\big )^T=\big (x_1(t),\ldots ,x_n(t),y_1(t),\ldots ,y_m(t)\big )^T\) is a solution of fractional master system (1) with the initial value \(\big (\varphi ^T(0),\phi ^T(0)\big )^T=\big (\varphi _1(0),\ldots ,\varphi _n(0),\phi _1(0),\ldots ,\phi _m(0)\big )^T\). Corresponding, let \(\big ({\overline{x}}^T(t),{\overline{y}}^T(t)\big )^T=\big ({\overline{x}}_1(t),\ldots ,{\overline{x}}_n(t),{\overline{y}}_1(t),\ldots ,{\overline{y}}_m(t)\big )^T\) be a solution of slave system (4) with the initial value \(\big ({\overline{\varphi }}^T(0),{\overline{\phi }}^T(0)\big )^T=\big ({\overline{\varphi }}_1(0),\ldots ,{\overline{\varphi }}_n(0),{\overline{\phi }}_1(0),\ldots ,{\overline{\phi }}_m(0)\big )^T\) satisfying \(e_i(0)\ne 0,\ {\overline{e}}_j(0)\ne 0 \) for \(i=1,2,\ldots ,n; \ j=1,2,\ldots ,m.\)
Obviously, \((e_i^{\ *},{\overline{e}}_j^{\ *})^T=(0,0,\ldots ,0)^T\in {\mathbb {R}}^{n+m}\) is an equilibrium solution of fractional error system (10). Choosing a piecewise continuous Lyapunov functional by the following forms
By carrying out the following discussions of two cases, we can obtain the time fractional derivative of \(V\big (t,e,{\overline{e}}\big )\) along the trajectories of fractional error system (10):
Case 1 For \(t=t_k\), from (2) and (H2), one has
Note that \(\lambda _{ik}^{(1)}\in (0,2),\ \lambda _{jk}^{(2)}\in (0,2)\ (i=1,2,\ldots ,n;\ j=1,2,\ldots , m;\ k=1,2,\ldots )\), then
Therefore
Case 2 For \(t\ne t_k\), that is, \(t\in [t_{k-1},t_k)\), similar to the discussions of the single layer fractional neural networks in [32], from (12) we obtain the upper right Caputo fractional derivative
The applications of Definition 2.2 yield that the following inequalities
where \(\text {sgn}\big (\cdot )\) denotes the sign function. Then, we can obtain the fractional-order derivatives along the solutions of first equation and third equation of system (10),
It follows from (H1) that

where \(i=1,2,\ldots ,n;\ j=1,2,\ldots ,m.\) Combining (16) with (18) yields that
By computations, from (19) one can get
where \(\tau _{ij}(t), \sigma _{ji}(t)\in [0,\tau ]\) in (H3), and \(\omega _1, \omega _2\) are defined in (11) as follows:
According to the above estimate, we know that any solution \((e^T(t),{\overline{e}}^T(t))^T\) of fractional error system (10) satisfies the following Razumikhin condition (see [51])
Note that \(\omega _2>\omega _1>0\), then there exists a real positive number \(\lambda \) such that \(0<\lambda \leqslant \omega _2-\omega _1\). Thus, we have
Combining (131415) and (21), it follows from Lemma 2.1 that
Hence
According to Definition 2.4, fractional master system (1) achieves global Mittag-Leffler synchronization with fractional slave system (6) under the delayed feedback controllers \(u_i(t)\) and \(v_j(t)\) in (9). This completes the proof of Theorem 3.1.\(\square \)
Note that global Mittag-Leffler stability implies globally asymptotic stability (see [9]), then we can get global asymptotical complete synchronization result between fractional master system (1) and fractional slave system (6). Similar to the proof of Theorem 3.1, we have the following result.
Theorem 3.2
Suppose that the conditions (H1)–(H3) hold, then fractional master system (1) can achieve global asymptotic synchronization with fractional slave system (6) based on the delayed feedback controllers (9), if there exist two positive constants \(\omega _1, \omega _2\) such that \(\omega _2>\omega _1>0\), where
Remark 3.1
Theorem 3.1 presents the global Mittag-Leffler synchronization conditions between master system (1) and fractional slave system (6) under the delayed feedback controllers (9), which reveals the close relations between the network coefficients, neuron activation functions and delayed-feedback control gain constants. The global Mittag-Leffler synchronization conditions are described as the algebraic inequalities, which are easy to achieve global Mittag-Leffler synchronization by choosing the appropriate control gain constants \(\eta _i, {\overline{\eta }}_j\) and \(\beta \).
Remark 3.2
In [33,34,35,36,37,38,39,40,41], the authors focused on discussing the various synchronization schemes for integer-order neural networks including exponential synchronization [33, 34], adaptive synchronization [35], finite-time synchronization [36, 37], fixed-time synchronization [38], cluster synchronization [39], pinning-controlled synchronization [40] and impulsive synchronization [41]. As a generalization of exponential synchronization with the integer-order derivative, this paper is devoted to investigating global Mittag-Leffler synchronization scheme with the fractional-order derivative.
Remark 3.3
The various effective control approaches have been applied to deal with synchronization problems concerning the integer-order or fractional-order neural networks such as distributed control [39], impulsive control [40], linear feedback control [42, 45], sliding model control [43, 44], adaptive feedback control [46, 47], adaptive pinning control [48] and linear delay feedback control [49]. In this paper, the delayed feedback controllers (9) are designed to achieve global Mittag-Leffler synchronization between fractional master system (1) and fractional slave system (6). The main advantage of the proposed strategy is that the control gain parameters \(\eta _i, {\overline{\eta }}_j\) and \(\beta \) can be searched in a wider range following the Mittag-Leffler synchronization conditions (11).
Remark 3.4
In the past few decades, the bidirectional associative memory (BAM) neural networks were extensively studied in [20, 21, 30, 47]. For instance, Rajivganthi et al. [47] have discussed the adaptive synchronization and finite-time synchronization of Caputo fractional-order memristor-based BAM delayed neural networks, yet the impulsive effects are not been taken into account. It should be pointed out that finite-time stability and global Mittag-Leffler stability are mutually independent concepts, because finite-time stability does not contain Mittag-Leffler synchronization, and vise versa (see [9, 28]). Stamova [32] studied the global Mittag-Leffler synchronization of impulsive fractional-order neural networks with time-varying delays, while the interconnection effects of the neurons between U-layer and V-layer were not involved in the network model. Chen et al. [42] discussed the global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks, in which the impulsive effects and delay factor are not been considered. In addition, the global Mittag-Leffler stability implies global asymptotic stability, but global asymptotic stability does not contain global Mittag-Leffler stability. Therefore, under the conditions of Theorem 3.1, fractional master system (1) and fractional slave system (6) can achieve globally asymptotic synchronization.
4 An Numerical Example
In this section, a numerical example for Caputo type fractional-order BAM neural networks with multiple time-varying delays and impulsive effects is given to illustrate the effectiveness and feasibility of the theoretical results. The MATLAB toolbox and modified predictor–corrector algorithm (see [52]) will be applied to deal with the numerical simulations.
Example 4.1
Consider the four-state Caputo fractional-order BAM neural network model with multiple time-varying delays and impulsive effects described by the following state equations
where \(\alpha \in (0,1)\) and
From above parameters, we know that \(\tau =2\), \(\lambda _{ik}^{(1)}=0.3\in (0,2)\ (i=1,2),\ \lambda _{jk}^{(2)}=0.5\in (0,2)\ (j=1,2),\) and
Choosing (24) as fractional master system, the corresponding slave system can be written as
In what follows, we will apply Theorems 3.1 and 3.2 to design the suitable delayed-feedback controllers (9), such that fractional master system (24) and fractional slave system (25) can achieve global Mittag-Leffler synchronization and globally asymptotic synchronization.
In fact, we can choose the delayed-feedback controllers as follows:
Then, we can obtain the following fractional error system with the delayed-feedback controllers (26)

By computations, we get
Thus, the conditions \(\omega _2>\omega _1>0\) and (H1)–(H3) in Theorems 3.1 and 3.2 are satisfied.

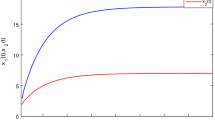
Trajectories of state norm for system (27) with different fractional order. a\(\alpha =0.4\). b\(\alpha =0.8\)

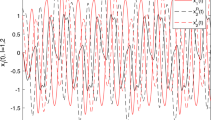
State trajectories of error system (27) with different fractional order. a\(\alpha =0.4\). b\(\alpha =0.8\)
For numerical simulations, the trajectories of state norm for fractional error system (27) are depicted with different order \(\alpha =0.4\) and \(\alpha =0.8\) in Fig. 1, which shows that the state norm \(\Vert e(t)\Vert +\Vert {\overline{e}}(t)\Vert \) asymptotically converges to zero. At the same time, we find an interesting phenomenon that the convergence speed of the state norm \(\Vert e(t)\Vert +\Vert {\overline{e}}(t)\Vert \) is faster and faster with the increasing of the order \(\alpha \in (0,1)\) with regard to Caputo fractional derivative. Furthermore, the asymptotic behaviors of system (27) are presented by the state trajectories with different fractional order \(\alpha =0.4\) and \(\alpha =0.8\) in Fig. 2. It can be directly observed that fractional master system (24) can achieve global Mittag-Leffler synchronization and globally asymptotic synchronization with fractional slave system (25) under the delayed-feedback controllers (26). Therefore, Theorems 3.1 and 3.2 are verified by means of the numerical simulations in Figs. 1 and 2.
Remark 4.1
By choosing the suitable delayed-feedback controllers (25), we have achieved global Mittag-Leffler synchronization and globally asymptotic synchronization between master system (24) and slave system (26). The control gain parameters can be flexibly chosen in terms of (11). The modified predictor–corrector algorithm (see [52]) has been applied to deal with the numerical simulations by the MATLAB toolbox. The numerical simulations in Example 4.1 further confirm the feasibility and effectiveness of the theoretical results.
5 Conclusions
In this paper, the global Mittag-Leffler synchronization and globally asymptotic synchronization for a class of Caputo fractional BAM with multiple time-varying delays and impulsive effects are investigated. The sufficient conditions are derived to ensure the global Mittag-Leffler synchronization and globally asymptotic synchronization based on delayed-feedback control strategy and Lyapunov functional approach, which are described as the algebraic inequalities in terms of network parameters. The control gain constants can be searched in a wider range following the proposed synchronization conditions. The differentiability of the neuron activation functions and time-varying delay functions in the addressed fractional network system are not necessarily required. Therefore, the proposed results are more general and less conservative than the ones in the existing literature. A numerical example is also presented to illustrate the feasibility and effectiveness of the theoretical results.
References
Podlubny I (1999) Fractional differential equations. Academic Press, New York
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier, Amsterdam
Shimizu N, Zhang W (1999) Fractional calculus approach to dynamic problems of viscoelastic materials. JSME Int J Ser C Mech Syst Mach Elem Mach Elem Manuf 42:825–837
Laskin N (2000) Fractional market dynamics. Phys A 287(3–4):482–492
Hilfer R (2000) Applications of fractional calculus in physics. World Scientific, Singapore
Metzler R, Klafter J (2000) The random walk’s guide to anomalous diffusion: a fractional dynamics approach. Phys Rep 339(1):1–77
Baleanu D (2012) Fractional dynamics and control. Springer, Berlin
Magin R (2010) Fractional calculus models of complex dynamics in biological tissues. Comput Math Appl 59(5):1586–1593
Li Y, Chen YQ, Podlubny I (2010) Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput Math Appl 59(5):1810–1821
Liu S, Wu X, Zhang YJ, Yang R (2017) Asymptotical stability of Riemann–Liouville fractional neutral systems. Appl Math Lett 86(1):65–71
Duarte-Mermoud MA, Aguila-Camacho N, Gallegos JA, Castro-Linares R (2015) Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun Nonlinear Sci Numer Simul 22(1–3):650–659
Li HL, Jiang YL, Wang ZL, Zhang L, Teng ZD (2015) Global Mittag–Leffler stability of coupled system of fractional-order differential equations on network. Appl Math Comput 270:269–277
Wu AL, Zeng ZG, Song XG (2016) Global Mittag–Leffler stabilization of fractional-order bidirectional associative memory neural networks. Neurocomputing 177:489–496
Li XD, Zhang XI, Song SJ (2017) Effect of delayed impulses on input-to-state stability of nonlinear systems. Automatica 76:378–382
Liu S, Li XY, Jiang W, Zhou XF (2012) Mittag–Leffler stability of nonlinear fractional neutral singular systems. Commun Nonlinear Sci Numer Simul 17(10):3961–3966
Jia RW (2017) Finite-time stability of a class of fuzzy cellular neural networks with multi-proportional delays. Fuzzy Set Syst 319:70–80
Aouiti C, M’Hamdi MS, Cao JD, Alsaedi A (2017) Piecewise pseudo almost periodic solution for impulsive generalised high-order Hopfield neural networks with leakage delays. Neural Process Lett 45(2):615–648
Wang ZS, Liu L, Shan QH, Zhang HG (2017) Stability criteria for recurrent neural networks with time-varying delay based on secondary delay partitioning method. IEEE Trans Neural Netw Learn Syst 26(10):2589–2595
Gong WQ, Liang JL, Cao JD (2015) Matrix measure method for global exponential stability of complex-valued recurrent neural networks with time-varying delays. Neural Netw 70:81–89
Xiong WJ, Shi YB, Cao JD (2017) Stability analysis of two-dimensional neutral-type Cohen–Grossberg BAM neural networks. Neural Comput Appl 28(4):703–716
Wang F, Yang YQ, Xu XY, Li L (2017) Global asymptotic stability of impulsive fractional-order BAM neural networks with time delay. Neural Comput Appl 28(2):345–352
Song QK, Yan H, Zhao ZJ, Liu YR (2016) Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw 79:108–116
Gong WQ, Liang JL, Zhang CJ, Cao JD (2016) Nonlinear measure approach for the stability analysis of complex-valued neural networks. Neural Process Lett 44(2):539–554
Song QK, Shu HQ, Zhao ZJ, Liu YR, Alsaadie FE (2017) Lagrange stability analysis for complex-valued neural networks with leakage delay and mixed time-varying delays. Neurocomputing 244:33–41
Kosko B (1987) Adaptive bidirectional associative memories. Appl Opt 26(23):4947–4960
Song C, Cao JD (2014) Dynamics in fractional-order neural networks. Neurocomputing 142:494–498
Zhang H, Ye RY, Cao JD, Alsaedi A (2017) Delay-independent stability of Riemann-Liouville fractional neutral-type delayed neural networks. Neural Process Lett. https://doi.org/10.1007/s11063-017-9658-7
Ding XS, Cao JD, Zhao X, Alsaadi FE (2017) Finite-time stability of fractional-order complex-valued neural networks with time delays. Neural Process Lett 46(2):561–580
Li RX, Cao JD, Alsaedi A, Alsaadi FE (2017) Stability analysis of fractional-order delayed neural networks. Nonlinear Anal Model Control 22(4):505–520
Zhang H, Ye RY, Cao JD, Alsaedi A (2017) Existence and globally asymptotic stability of equilibrium solution for fractional-order hybrid BAM neural networks with distributed delays and impulses. Complexity 2017:1–13
Zhang H, Ye RY, Liu S, Cao JD, Alsaedi A, Li XD (2018) LMI-based approach to stability analysis for fractional-order neural networks with discrete and distributed delays. Int J Syst Sci 49(3):537–545
Stamova I (2014) Global Mittag–Leffler stability and synchronization of impulsive fractional-order neural networks with time-varying delays. Nonlinear Dyn 77(4):1251–1260
Yang XS, Cao JD, Liang JL (2017) Exponential synchronization of memristive neural networks with delays: interval matrix method. IEEE Trans Neural Netw Learn Syst 28(8):1878–1888
Li XF, Fang JA, Li HY (2017) Exponential synchronization of memristive chaotic recurrent neural networks via alternate output feedback control. Asian J Control. https://doi.org/10.1002/asjc.1562
Wu EL, Yang XS (2016) Adaptive synchronization of coupled nonidentical chaotic systems with complex variables and stochastic perturbations. Nonlinear Dyn 84(1):261–269
Wu YY, Cao JD, Li QB, Alsaedi A, Alsaadi FE (2017) Finite-time synchronization of uncertain coupled switched neural networks under asynchronous switching. Neural Netw 85:128–139
Zhou C, Zhang WL, Yang XS, Xu C, Feng JW (2017) Finite-time synchronization of complex-valued neural networks with mixed delays and uncertain perturbations. Neural Process Lett 46(1):271–291
Yang XS, Lam J, Ho DWC, Feng ZG (2017) Fixed-time synchronization of complex networks with impulsive effects via non-chattering control. IEEE Trans Automat Control 62(11):5511–5521
Hu AH, Cao JD, Hu MF, Guo LX (2016) Distributed control of cluster synchronisation in networks with randomly occurring non-linearities. Int J Syst Sci 47(11):2588–2597
He WL, Qian F, Cao JD (2017) Pinning-controlled synchronization of delayed neural networks with distributed-delay coupling via impulsive control. Neural Netw 85:1–9
Xiong WJ, Zhang D, Cao JD (2017) Impulsive synchronisation of singular hybrid coupled networks with time-varying nonlinear perturbation. Int J Syst Sci 48(2):417–424
Chen JJ, Zeng ZG, Jiang P (2014) Global Mittag–Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw 51:1–8
Ding ZX, Shen Y (2016) Projective synchronization of nonidentical fractional-order neural networks based on sliding mode controller. Neural Netw 76:97–105
Wu HQ, Wang LF, Niu PF, Wang Y (2017) Global projective synchronization in finite time of nonidentical fractional-order neural networks based on sliding mode control strategy. Neurocomputing 235:264–273
Zheng MW, Li LX, Peng HP, Xiao JH, Yang YX, Zhao H (2017) Finite-time projective synchronization of memristor-based delay fractional-order neural networks. Nonlinear Dyn 89(4):2641–2655
Bao HB, Park JH, Cao JD (2015) Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn 82(3):1343–1354
Rajivganthi C, Rihan FA, Lakshmanan S, Rakkiyappan R, Muthukumar P (2016) Synchronization of memristor-based delayed BAM neural networks with fractional-order derivatives. Complexity 21:412–426
Wang F, Yang YQ, Hu MF, Xu XY (2015) Projective cluster synchronization of fractional-order coupled-delay complex network via adaptive pinning control. Phys A 434:134–143
Bao HB, Park JH, Cao JD (2016) Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw 81:16–28
Gu YJ, Yu YG, Wang H (2016) Synchronization for fractional-order time-delayed memristor-based neural networks with parameter uncertainty. J Frankl Inst 353(15):3657–3684
Yan JR, Shen JH (1999) Impulsive stabilization of impulsive functional differential equations by Lyapunov–Razumikhin functions. Nonlinear Anal Theory Methods Appl 37(2):245–255
Bhalekar S, Daftardar-Gejji V (2011) Apredictor–corrector scheme for solving nonlinear delay differential equations of fractional order. J Fract Calc Appl 1(5):1–9
Author information
Authors and Affiliations
Corresponding author
Additional information
This work is jointly supported by the National Natural Science Fund of China (11301308, 61573096, 61272530, 61374183), the Fund of Jiangsu Provincial Key Laboratory of Networked Collective Intelligence (BM2017002), the 333 Engineering Fund of Jiangsu Province of China (BRA2015286), the Natural Science Fund of Anhui Province of China (1608085MA14), the Key Project of Natural Science Research of Anhui Higher Education Institutions of China (gxyqZD2016205, KJ2015A152), and the Natural Science Youth Fund of Jiangsu Province of China (BK20160660).
Rights and permissions
About this article

Cite this article
Ye, R., Liu, X., Zhang, H. et al. Global Mittag-Leffler Synchronization for Fractional-Order BAM Neural Networks with Impulses and Multiple Variable Delays via Delayed-Feedback Control Strategy. Neural Process Lett 49, 1–18 (2019). https://doi.org/10.1007/s11063-018-9801-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-018-9801-0