
Abstract
In this paper, synchronization analysis and parameters identification issues are explored for uncertain delayed fractional-order BAM neural networks. By designing pertinent state feedback control strategies and parameters updated laws, some ample criteria are procured for ensuring the finite-time synchronization and the Mittag-Leffler synchronization of the considered networks via exploiting the Lyapunov function theory, fractional calculus theory and inequality analysis techniques, meanwhile, the settling time of finite-time synchronization is given, which relates to the initial values. Moreover, parameters identification is actualized triumphantly for uncertain or unknown parameters. Finally, numerical examples are provided to show the availability of the theoretical results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Generally speaking, neural networks (NNs) are comprised of a great deal of interconnected neural units that are present in natural and artificial systems, including power grid, financial system and biological network [1,2,3], etc. In recent decades, NNs have become an irreplaceable tool to dissect practical issues in diverse disciplines, such as digital communication, industrial manufacture, image recognition and engineering fields [4,5,6,7,8]. Kosko [9] in 1987 proposed bidirectional associative memory NNs (BAMNNs), which make up two layers of hetero associative neurons. Each layer is connected to each others by neurons, and one layer is connected to another, there is no direct interconnection between the same layer elements. Unlike the ecumenic NNs with only the one layer, it is the fact that BAMNNs with two layers that can implement more effectively and quickly handle some practical problems. For example, BAMNNs can be highly accurate simulation the human brain thanks to forming excellent performance in parallel processing aspect. More scholars have concentrated on the theme of BAMNNs and some remarkable papers have been published in [10,11,12,13,14] owing to the potential applications in pattern recognition, chemical processes, associative memory, optimization problems and electrical engineering [15,16,17,18], etc. In addition, in the electronic NNs, it is noted that the time delay will inescapably engender owing to the limited exchanging speeds of data processing and amplifier circuitry [19], the influence of delay has also been taken into account for BAMNNs.
It is well known that the fractional-order (FO) calculus, as an extension of the integer order (IO) calculus, has been brought into focus due to wide range of applications in image encryption, viscoelastic systems, mathematical biology and science engineering [20,21,22]. These days, FO calculus becomes a kinetic research motif because FO calculus can describe precisely dynamic behavior, which opens up entirely possibilities for science development. It is worth emphasizing that the ascendency from the fact that FO calculus offers an exceptional facility for depicting the memory and heritability of diverse materials and processes compared with the conventional IO calculus. Furthermore, the introduction of the FO calculus into the controlled system produces degrees of freedom, which can ameliorate the elasticity of controller design. Recently, serval dynamics analysis results for fractional-order neural networks (FONNs) have been obtained in [23,24,25,26,27,28] and references therein. Among which, the synchronization analysis of FONNs has captured gigantic attention.
It is the fact remarkably that massive applications of FONNs rest with their essential properties, expressly synchronization. Synchronization, which represents interesting collective dynamics and delineates the state of two or more systems, tends to be concordant. Synchronization phenomenon, as the most essential performance quota, has become a hot subject due to stupendous potential applications in distrinct realms, such as in secure communication, pattern recognition, information science and industrial automation [29,30,31]. From the complex view of the system structure, fractional-order BAMNNs (FOBAMNNs) can display prosperous dynamical behaviors. Nowadays, the multitudinous synchronization problems for FOBAMNNs containing Mittag-Leffler synchronization [32], fixed-time synchronization [33], quasi-synchronization [34] and so on have been divulged by the various control strategies. However, to our best knowledge, the novel and effectual measures for the synchronization analysis of delayed FOBAMNNs (DFOBAMNNs) are still lacking, which has evoked our research enthusiasms.
There is no doubt that the precise value of parameter cannot be procured because of the disturbances in the measurement errors and the added perturbations, which bring about system parameter uncertainties. One should note that parameter uncertainties should be noticed in the research of dynamical behaviors because they can destroy the synchronization and some other excellent properties. Most previous works on the thesis that the system parameters are affirmatory in advance have been obtainable. However, there are very few efforts about the synchronization issues for uncertain DFOBAMNNs, this research gap has bestirred us to explore the challenging tasks of synchronization for uncertain DFOBAMNNs. To address this problem, the following questions are naturally raised: whether uncertain DFOBAMNNs can reach the finite-time synchronization and Mittag-Leffler synchronization based on pertinent state feedback control strategies and parameters update laws? If we can get synchronization conditions, how to devise the fitting controllers and to dispose of the delay terms.
Vigorously provoked by the above discussions, we attempt to delve the problems of synchronization analysis and parameters identification for uncertain DFOBAMNNs. The main novelty of this paper is reflected in the following aspects. (1) The copious existing synchronization problems for BAMNNs neglect the element of parameter uncertainties, uncertain DFOBAMNN model is established in this paper. (2) In this paper, we not only ponder the influences of parameter uncertainties in BAMNNs, but also consider the time delay effects in BAMNNs, i.e., the parameter uncertainties and time delay are brought into FOBAMNNs. (3) The novel controllers and parameters updated laws are designed. (4) The synchronization and parameters identification issues of uncertain DFOBAMNNs are firstly investigated, some sufficient criteria are procured to guarantee the synchronization and to actualize parameters identification for uncertain DFOBAMNNs.
The remainder of the paper is organized in brief as follows. In Sect. 2, system description and preliminary knowledge are given. In Sect. 3, the synchronization and parameters identification for uncertain DFOBAMNNs are addressed through designing two novel controllers. In Sect. 4, two examples are provided to illustrate the effectiveness of the results. Finally, conclusion is clarified in Sect. 5.
2 Preliminaries and model description
Notations: \(\mathbb {R}\) denotes the set of real numbers, \(\mathbb {N}^+=\{1,2,3,\cdots \}\) is the set of the positive integer, \(\Vert h\Vert _1=\sum \nolimits _{\varrho =1}^n|h_\varrho |\) represents the 1-norm of h, \(\mathcal {A}=\{1,2,\cdots ,n\}\), \(\mathcal {B}=\{1,2,\cdots ,m\}\), \(\mathrm {sign}(\cdot )\) shows the standard symbolic function.
2.1 Preliminaries
In order to derive our main results of this paper, some useful definitions and lemmas are proposed, which will smoothly promote the proof of the results in the sequel.
Definition 1
[35] The fractional integral of order \(\eta\) for function h(t) is defined as
where \(\Gamma (\cdot )\) is the Gamma function, and \(\Gamma (\eta )=\int _0^{+\infty }{\rho }^{\eta -1}e^{-\rho }d{\rho }.\)
Definition 2
[35] Caputo fractional derivative of order \(\eta\) for function h(t) is described by
Definition 3
[35] The Mittag-Leffler function with a parameter \(\eta >0\) is denoted by
Lemma 1
[35] Let \(t \ge t_0,\) then \(E_\eta (\rho (t-t_0)^\eta )\) is monotonically non-increasing and \(0 \le E_\eta (\rho (t- t_0)^\eta )\le 1\) for \(\rho \le 0.\)
Lemma 2
[36] If \(h(t)\in C([t_0,+\infty ],\mathbb {R})\) describes a continuously differentiable function, for any \(0<\eta <1\), then the following inequality holds
Lemma 3
[28] Let u(t), v(t) be two nonnegative continuous functions and satisfy
where \(0<\eta <1,\Upsilon >0\) and \(\hbar >0,\) then
In particular, when the constant term \(\hbar =0\), the following corollary will be yielded based on the Lemma 3.
Corollary 1
Let u(t), v(t) be two nonnegative continuous functions and satisfy
where \(0<\eta <1,\Upsilon >0\), then
Proof
It follows from (1) that there exists a nonnegative function \(\Phi (t)\) satisfying
it is obvious that the inequality (1) above is a simple modification based on Lemma 5 in [28], then the rest testify is similar to Lemma 5 in [28], here is omitted.
Lemma 4
[38]. Let h(t) be a continuous function on \(t\in [t_0,+\infty )\), which satisfies
where \(0<\eta <1\), \(\imath \in \mathbb {R}\), then
2.2 Model description
In the real world, the system parameter may not be precisely known. Hence, it is necessary to identify the uncertain parameter. Next, we consider a uncertain DFOBAMNN, which is proposed by
where \(\eta \in (0,1)\), \(t\ge 0\), \(h=1, 2,\cdots , m\) and \(j = 1, 2,\cdots , n\), \(\begin{gathered} x(t) = (x_{1} (t),x_{2} (t), \cdots ,x_{n} (t))^{T} \hfill \\ y(t) = (y_{1} (t),y_{2} (t), \cdots ,y_{m} (t))^{T} \hfill \\ \end{gathered}\), \(x_h(t)\), \(y_j(t)\) denote the state vectors of the hth neuron in the x-layer and jth neuron in the y-layer at time t, \(a_h, \alpha _j >0\) represent decay rate coefficients of neuron, \(c_{jh}, d_{jh}\) and \(\beta _{hj}, b_{hj}\) indicate the synaptic connection parameters of unknown or uncertain between the neurons in the two layers at time t and \(t-\kappa\), respectively, \(f_j, g_h\) are the activation functions of the neurons at time t and \(t-\kappa\), \(\Theta _h(t), \Theta _j(t)\) stand for the external inputs, \(\kappa \ge 0\) is the constant time delay. The initial conditions associated with (3) are
where \(h\in \mathcal {A}, j\in \mathcal {B}\), \(\psi _h(s), \phi _j(s)\in C([t_0-\kappa ,t_0],\mathbb {R})\).
Hypothesis 1
For any \(\Re _1, \Re _2 \in \mathbb {R}\), there exist \(F_j>0\) and \(G_h>0\) such that
where \(h\in \mathcal {A}, j\in \mathcal {B}\).
Hypothesis 2
For any \(h\in \mathcal {A}, j\in \mathcal {B}\), there exist positive constants F, G such that \(|f_j(\cdot )|\le F\), \(|g_h(\cdot )|\le G\).
Remark 1
The Lipschitz conditions in Hypothesis 1, which were widely used in much of the existing literature works in [39, 40], are essential in studying the synchronization and stability issues of uncertain networks, including traditional activation functions, piecewise linear function and the sigmoid function and so on.
In this paper, we will reach the derive-response synchronization, for convenience, we regard the uncertain DFOBAMNN (3) as the drive system, and the controlled response system can be denoted by
where we assume that \(\check{c}_{jh}, \check{d}_{jh}\) and \(\check{\beta }_{hj}\), \(\check{b}_{hj}\) are the estimated values of the unknown parameters \(c_{jh}, d_{jh}\) and \(\beta _{hj}, b_{hj}\), respectively, other parameters are the same as those shown in uncertain DFOBAMNN (3), \(U_h(t), U_j(t)\) denote the devised controllers that will realize the synchronization of uncertain DFOBAMNNs (3) and (5). The initial conditions of (5) can be depicted as
where \(h\in \mathcal {A}, j\in \mathcal {B}\), \(\tilde{\psi }_h(s), \tilde{\phi }_j(s)\in C([t_0-\kappa ,t_0],\mathbb {R})\).
Definition 4
Uncertain DFOBAMNNs (3) and (5) are said to achieve finite-time synchronization together with designing proper controller, if there exists a constant \(0<\tilde{t} <+\infty\) such that \( \lim _{{t \to \tilde{t}}} \Vert \tilde{x}_h(t)-x_h(t)\Vert +\Vert \tilde{y}_j(t)-y_j(t)\Vert =0\) and \(\Vert \tilde{x}_h(t)-x_h(t)\Vert +\Vert \tilde{y}_j(t)-y_j(t)\Vert \equiv 0\) for all \(t>\tilde{t}\).
Definition 5
For any solutions \(x_1(t), x_2(t)\) and \(y_1(t), y_2(t)\) of uncertain DFOBAMNNs (3) and (5) with different initial values denoted by \(x_{10}, x_{20}\) and \(y_{10}, y_{20}\) if there exist two positive constants P and \(m_0\) such that
then uncertain DFOBAMNNs (3) and (5) can achieve Mittag-Leffler synchronization.
Define synchronization error signals \(z_h(t)\) and \(e_j(t)\), where \(z_h(t)=\tilde{x}_h(t)-x_h(t), e_j(t)=\tilde{y}_j(t)-y_j(t)\), from (3) and (5), the dynamics of synchronization errors \(z_h(t), e_j(t)\) can be expressed by
3 Main results
In this section, by taking advantage of the constructed properly Lyapunov functions and devising state feedback controllers, several sufficient criteria are derived to reach Mittag-Leffler synchronization and finite-time synchronization for uncertain DFOBAMNNs (3) and (5).
To study the synchronization behaviors and parameters identification for uncertain DFOBAMNNs (3) and (5), distinct state feedback controls are proposed to synchronize uncertain DFOBAMNNs (3) and (5) with different initial conditions. Based on diverse control strategies, some theoretical results are developed for uncertain DFOBAMNNs (3) and (5). Next, in order to realize Mittag-Leffler synchronization, we design the following state feedback control protocol
where \(k_h, l_h\) and \(\sigma _j, \epsilon _j\) are the positive control gains and updated laws of the parameters \(\check{c}_{jh}, \check{d}_{jh}\) and \(\check{\beta }_{hj}, \check{b}_{hj}\) are taken as
where \(\xi _{h}, \mu _{j}\) are arbitrary tunable constants.
3.1 Mittag-Leffler synchronization control
In this subsection, based on Hypotheses 1 and 2 as well as the idea that the parameters are uncertain, state feedback controller is provided to achieve Mittag-Leffler synchronization.
Theorem 1
Let Hypotheses 1 and 2 hold, then uncertain DFOBAMNNs (3) and (5) can realize Mittag-Leffler synchronization based on state feedback controller (8) and adaptive law (9), control gains \(k_{h}, l_{h}, \sigma _j, \epsilon _j\) are constants, which satisfy the following conditions:
Proof
Introducing the following Lyapunov function
where
By applying Lemma 2 and Hypotheses 1 and 2, the Caputo derivative of V(t) along the trajectory of (7) with state feedback controller (8) and parameters updated laws (9) can be derived as
Correctly choosing \(l_h, \epsilon _j, \xi _h\) and \(\mu _j\) such that \(l_h>\sum \nolimits _{j=1}^nb_{hj}G_h\), \(\epsilon _j>\sum \nolimits _{h=1}^md_{jh}F_j\), \(\xi _h>F\), \(\mu _j>G\). Applying those to (17) yields
where \(\Xi = \min \{\Xi _1,\Xi _2 \}\), \({\Xi }_1=\min \limits _{h\in \mathcal {A}}\Big \{a_h+k_h- \sum\nolimits_{{j = 1}}^{n} {\beta _{{hj}} } G_{h} \Big \}>0\), \({\Xi }_2=\min \limits _{j\in \mathcal {B}}\Big \{\alpha _j+\sigma _j-\ \sum\nolimits_{{h = 1}}^{m} {c_{{jh}} } F_{j} \Big \}>0\), it can be concluded from the inequality (18) and Corollary 1 that
which implies that
where \(V_1(t_0)=\sum \nolimits _{h=1}^m|z_h(t_0)|+\sum\nolimits _{j=1}^n|e_j(t_0)|\), \(V_2(t_0)= \sum \nolimits _{h=1}^m\sum\nolimits _{j=1}^n\big (|\check{c}_{jh}-c_{jh}|+|\check{d}_{jh}-d_{jh}|+|\check{\beta }_{hj}-\beta _{hj}|+|\check{b}_{hj}-b_{hj}|\big )\). Thus, uncertain DFOBAMNNs (3) and (5) can realize Mittag-Leffler synchronization and the unknown parameters \(c_{jh}, d_{jh}\) and \(\beta _{hj}, b_{hj}\) can be triumphantly identified by \(\check{c}_{jh}, \check{d}_{jh}\) and \(\check{\beta }_{hj}, \check{b}_{hj}\) based on the controller (8) and adaptive law (9), the proof is completed.
3.2 Finite-time synchronization control
In the following subsection, it is the aim to derive some sufficient criteria studying finite-time synchronization problem for uncertain DFOBAMNNs (3) and (5) via proposed delayed state feedback control. In order to achieve the finite-time synchronization, the delayed state feedback controller is described by
where \(p_h,q_j\) are the control gains, \(\lambda _h, \omega _j\) depict the tunable positive constants. The parameters are adapted according to the following rules:
Remark 2
On the one hand, it is worth mentioning that the third terms about symbolic function the above controller (21) are based on the finite-time control protocol, that is to say, by adding the third terms to the control law (21), we can reach finite-time synchronization. Otherwise, the synchronization time is infinite, which is commonly called asymptotic synchronization. On the other hand, it should be noticed that the global Mittag-Leffler synchronization suggests the global asymptotical synchronization.
Theorem 2
Under Hypothesis 1, uncertain DFOBAMNNs (3) can reach finite-timely synchronized onto (5) under the control law (21) and the adaptive law (22) if the control parameters satisfy
and
In addition, the settling time \(\tilde{t}\) of finite-time synchronization is given by
where \(\lambda =\min \limits _{i\in \mathcal {A}}{\lambda _h}\), \(\omega =\min \limits _{j\in \mathcal {B}}{\omega _j}\).
Proof
We construct the following function
where
According to the Lemma 2 and Hypothesis 1, the Caputo derivative of W(t) along the trajectory of (7) with state feedback controller (21) and parameters updated laws (22) can be evaluated
We choose \(H_1=\min \limits _{h\in \mathcal {A}}\Big (a_h+p_h- \left( {a_{h} + p_{h} - \sum\nolimits_{{j = 1}}^{n} {|\beta _{{hj}} |G_{h} } } \right) \Big ) { > } 0\), \(H_2=\min \limits _{j\in \mathcal {B}}\Big (\alpha _j+q_j- \sum\nolimits_{{h = 1}}^{m} {|c_{{jh}} |F_{j} } \Big ){ > }0\) leading to
where \(\lambda =\min \limits _{i\in \mathcal {A}}{\lambda _h}\), \(\omega =\min \limits _{j\in \mathcal {B}}{\omega _j}\). For (30), there exists a nonnegative function \(\daleth (t)\) satisfying
it follows from Definition 1 and (31) that
Using \({\Gamma ({\eta })}>0\), \((t-{\rho })^{{\eta }-1}\daleth ({\rho })>0\), for any \(\rho \in (t_0,t)\), lead to \(_{t_0}D_{t}^{-\eta }\daleth (t)\ge 0\), then
Denote \(S(t)=W(t_0)-\frac{(\lambda +\omega )(t-t_0)^\eta }{\Gamma ({\eta +1})}\), it is the fact that S(t) is the strictly increasing function, thus \(S(t)=0\) if and only if
\(S(t)\le 0\) for any \(t\ge \tilde{t}\), thus \(W(t)\le S(t)\le 0\) for any \(t\ge \tilde{t}\), and W(t) is a nonnegative function, thus \(W(t)\equiv 0\) for any \(t\ge \tilde{t}\). Therefore, \(\sum\nolimits_{{h = 1}}^{n} {z(t)| + } \sum\nolimits_{{j = 1}}^{m} | e(t)| \equiv 0\) for \(t\ge \tilde{t}\), through Definition 5, uncertain DFOBAMNNs (3) and (5) can achieve synchronization in a finite time under delayed state feedback controller (21) and adaptive rule (22).
Remark 3
The theoretical results obtained in Theorems 1 and 2 show that the controllers (8) and (21) can solve Mittag-Leffler synchronization and finite-time synchronization as well as parameters identification problems with the help of adapted laws (9) and (22), respectively, if the parameters meet conditions (10)–(13), (23)–(24). In other words, our main purposes can also be achieved despite the system synaptic connection parameters \(c_{jh}, d_{jh}\) and \(\beta _{hj}, b_{hj}\) cannot be known in advance.
Expressly, if \(\lambda _h=0, \omega _j=0\) in state feedback controller (21), then controller (21) is degenerated into the following form:
For the case, we can further get the following corollary.
Corollary 2
Under hypothesis 1, uncertain DFOBAMNNs (3) can reach asymptotically synchronized onto (5) under the control law (35) and the adaptive law (22) if the control parameters satisfy
and
Proof
Considering the following Lyapunov function
where
the rest testify is similar to Theorem 2, here is omitted.
Remark 4
It is the fact that the integer calculus is a special case of the fractional calculus, and the exponential function can be regarded as the form of the integer order of the Mittag-Leffler function. Thus, when \(\eta =1\), the theoretical results of this paper also hold, then the synchronization and parameters identification for uncertain DFOBAMNNs are discussed in the framework of integer order. It is worth emphasizing that time delay term is added to the controller adopted in this paper, which makes our theoretical results get very smoothly. If otherwise, it is impossible. This suggests that time delay plays an important role in studying dynamics behavior for uncertain DFOBAMNNs.
Remark 5
For the sake of identifying the uncertain parameters, the conditions in the Theorems 1 and 2 must be met. When synchronization is implemented, i.e., \(\tilde{x}_h(t)-x_h(t)=z_h(t)\rightarrow 0\) and \(\tilde{y}_j(t)-y_j(t)=e_j(t)\rightarrow 0\), as \(t\rightarrow \infty\), the dynamics of error system (7) can be briefed in the following form:
Based on the linearly independence in the Advanced Algebra, accurate identification of the unknown parameters \(\check{c}_{jh}, \check{d}_{jh}\) and \(\check{\beta }_{hj}, \check{b}_{hj}\), which is equivalent to the function elements \({f_j(\tilde{y}_j(t)), f_j(\tilde{y}_j(t-\kappa ))}\) and \({g_h(\tilde{x}_h(t)), g_h(\tilde{x}_h(t-\kappa ))},\) is linearly independent, respectively.
Remark 6
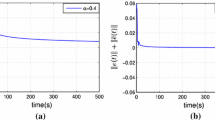
On the whole, the conclusion we can get from Fig. 9 is that the convergence rate of \(\Vert e(t)\Vert +\Vert z(t)\Vert\) reduces as the order \(\eta\) enlarges.
4 Numerical simulation
In this section, two examples are presented to demonstrate our Theorems 1, 2, respectively.
Example 1
Consider two-dimensional uncertain DFOBAMNN as follows:
where \(\eta =0.98\), functions \(f(s)=g(s)=\tan h(s)\), intercalating the parameters as \(a_1 = a_2=0.5, \alpha _1 = \alpha _2=0.5, x=(x_1, x_2)^T, y=(y_1, y_2)^T, \Theta =(0,0)^T, G=G_h=F_j=F=1, \kappa =0.2\), the initial values are taken as \(x(s)=[3,2]^T\) and \(y(s)=[2,4]^T\) for all \(s\in [-0.2, 0]\). The connective weights are defined as
Figs. 1 and 2 exhibit the time evolution of the state trajectories of uncertain DFOBAMNN (42).

Time responses of \(x_1(t)\) and \(x_2(t)\) with \(\omega\)=0.98

Time responses of \(y_1(t)\) and \(y_2(t)\) with \(\omega\)=0.98
The corresponding response system is denoted by
with
where \(\check{c}_{jh}, \check{d}_{jh}, \check{\beta }_{hj}\) and \(\check{b}_{hj}\) are the estimations of parameters \(c_{jh}, d_{jh}, \beta _{hj}, b_{hj}\), respectively.
In the following, the control strategies (8)–(9) can be applied to identify the uncertain parameters, we choose \(\xi _1=\xi _2=5, \mu _1=\mu _1=5\), \(k_h=\sigma _j=1.6\), \(l_h=\epsilon _j=8\) for \(h,j=1,2\). For convenience, we presume only the eight parameters\(c_{11}=3, c_{22}=1.2, d_{11}=4.3, d_{22}=2.2, \beta _{11}=2.5, \beta _{22}=7.3, b_{11}=5, b_{22}=1.6\) will be identified, we take the initial conditions as \([\check{c}_{11}(0), \check{c}_{22}(0), \check{d}_{11}(0), \check{d}_{22}(0)]^T=[1,1,1.2,1.2]\), \([\check{\beta }_{11}(0), \check{\beta }_{22}(0), \check{b}_{11}(0), \check{b}_{22}(0)]^T=[0.8,0.8,0.8,0.8]\). By calculation, the conditions of Theorem 1 are satisfied. Fig. 3 depicts that the synchronization errors converge to zero. Fig. 4 displays the identification trajectory of unknown parameters, which all the unknown parameters can be triumphantly identified, the evaluation of unknown parameters can converge to certain constants. Figs. 1, 2, 3 and 4 prove our theoretical result of Theorem 1.

Time responses of synchronization errors \(e_1\), \(e_2\) and \(z_1\), \(z_2\) under controller (8)

Identification for unknown parameters \(\check{c}_{jh}\), \(\check{d}_{jh}\), \(\check{\beta }_{hj}\) and \(\check{b}_{hj}\) under controller (8)
Example 2
The two-dimensional uncertain DFOBAMNN is described by
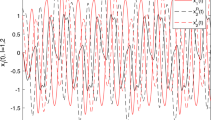
where \(\eta =0.97\), functions \(f(s)=g(s)=\tan h(s)\), we take the parameters as \(a_1 = a_2=1, \alpha _1 = \alpha _2=2, x=(x_1, x_2)^T, y=(y_1, y_2)^T, \Theta =(0,0)^T, G=G_h=F_j=F=1, \kappa =0.2\), the initial values are selected as \(x(s)=[-0.2,-0.3]^T\) and \(y(s)=[-0.1,-0.4]^T\) for all \(s\in [-0.2, 0]\). The connective weights are presented by
Figs. 5 and 6 display the time evolution of the state trajectories of uncertain DFOBAMNN (44).

Time responses of \(x_1(t)\) and \(x_2(t)\) with \(\omega\)=0.97

Time responses of \(y_1(t)\) and \(y_2(t)\) with \(\omega\)=0.97
In order to substantiate the validity of Theorem 2, we suppose that parameters \(c_{jh}, d_{jh}, \beta _{hj}, b_{hj}\) are unknown, then the corresponding controlled system is denoted by
with
where \(\check{c}_{jh}, \check{d}_{jh}, \check{\beta }_{hj}\) and \(\check{b}_{hj}\) are the estimations of parameters \(c_{jh}, d_{jh}, \beta _{hj}, b_{hj}\), respectively.
In addition, the controller (21) is taken as \(p_h=q_j=5\), \(\lambda _h=\omega _j=0.5\) for \(h,j=1,2\). For simplicity, we presume only the eight parameters \(c_{11}=2.8, c_{22}=4, d_{11}=4.6, d_{22}=3.9, \beta _{11}=3, \beta _{22}=1, b_{11}=1.5, b_{22}=2.3\) need to be identified, we choose the initial conditions as \([\check{c}_{11}(0), \check{c}_{22}(0), \check{d}_{11}(0), \check{d}_{22}(0)]^T=[1.2,1.2,1.4,1.4]\),\([\check{\beta }_{11}(0), \check{\beta }_{22}(0), \check{b}_{11}(0), \check{b}_{22}(0)]^T=[0.6,0.6,0.8,0.8]\) Fig. 7 exhibits that the synchronization errors converge to zero in a finite time, thus, we can conclude that the uncertain DFOBAMNNs (44) and (45) can be synchronized in finite time through state feedback control (21) and parameter updated law (22). From Fig. 8, it can be clearly seen that all the unknown system parameters \(\check{c}_{jh}, \check{d}_{jh}, \check{\beta }_{hj}\) and \(\check{b}_{hj}\) are successfully identified, respectively. From Figs. 5, 6, 7 and 8, we can conclude the validity of the result of Theorem 2 via designing method.

Time responses of synchronization errors \(e_1\), \(e_2\) and \(z_1\), \(z_2\) under controller (21)

Identification for unknown parameters \(\check{c}_{jh}\), \(\check{d}_{jh}\), \(\check{\beta }_{hj}\) and \(\check{b}_{hj}\) under controller (21)

The evolutions of \(\Vert e(t)\Vert +\Vert z(t)\Vert\) with \(\eta = 0.98,\eta = 0.68,\eta = 0.38\)
5 Conclusion
In this paper, the synchronization for uncertain DFOBAMNNs has been discussed and the unknown parameters have been identified triumphantly. By applying Lyapunov function and inequality technique, some sufficient conditions on uncertain DFOBAMNNs are derived to ensure the finite-time synchronization and the Mittag-Leffler synchronization as well as parameters identification. Moreover, the settling time of the finite-time synchronization is estimated. Our results improve existing results about the synchronization in FO Lyapunov framework as special cases without considering unknown parameters. In addition, the measures in this paper can also be extended to investigate the synchronization for other NNs with parameters uncertainties and time delays. Finally, the feasibilities of the theoretical results are showed by proposing numerical examples. How to apply the results in practices, such as the associative memory, machine learning and so on, synchronization problem for memristor-based NNs with parameters uncertainties and time delays, will be our future research topics.
References
He X, Ho D, Huang T, Yu J, Abu-Rub H, Li C (2018) Second-order continuous-time algorithms for economic power dispatch in smart grids. IEEE Trans Syst Man Cybern Syst 48:1482–1492
Xu W, Cao J, Xiao M, Ho D, Wen G (2015) A new framework for analysis on stability and bifurcation in a class of neural networks with discrete and distributed delays. IEEE Trans Cyber 45:2224–2236
Li X, Rakkiyappan R, Velmurugan G (2015) Dissipativity analysis of memristor-based complex-valued neural networks with time-varying delays. Inf Sci 294:645–665
Hoppensteadt F, Izhikevich E (2000) Pattern recognition via synchronization in phase-locked loop neural networks. IEEE Trans Neural Netw Learn Syst 11:734–738
Chien T, Liao T (2005) Design of secure digital communication systems using chaotic modulation, cryptography and chaotic synchronization. Chaos Solitons Fract 24:241–255
Wu Y, Li Y, He S, Guan Y (2020) Sampled-data synchronization of network systems in industrial manufacture. IEEE Trans Syst Man Cybern Syst 50:3210–3219
Shen H, Zhu Y, Zhang L, Park J (2017) Extended dissipative state estimation for Markov jump neural networks with unreliable links. IEEE Trans Neural Netw Learn Syst 28:346–358
Wang L, Dong T, Ge M (2019) Finite-time synchronization of memristor chaotic systems and its application in image encryption. Appl Math Comput 347:293–305
Kosko B (1987) Adpative bidirecctional associative memoreis. Appl Opt 26:4947–4960
Cao J, Ying W (2014) Matrix measure strategies for stability and synchronization of inertial BAM neural network with time delays. Neural Netw 53:165–172
Chen S, Li H, Kao Y, Zhang L, Hu C (2021) Finite-time stabilization of fractional-order fuzzy quaternion-valued BAM neural networks via direct quaternion approach. J Frankl Inst 358:7650–7673
Anbuvithya R, Mathiyalagan K, Sakthivel R, Prakash P (2015) Non-fragile synchronization of memristive BAM networks with random feedback gain fluctuations. Commun Nonlinear Sci Numer Simul 29:427–440
Ali M, Saravanakumar R, Cao J (2016) New passivity criteria for memristor-based neutral-type stochastic BAM neural networks with mixed time-varying delays. Neurocomputing 171:1533–1547
Xiao J, Wen S, Yang X, Zhong S (2020) New approach to global Mittag-Leffler synchronization problem of fractional-order quaternion-valued BAM neural networks based on a new inequality. Neural Netw 122:320–337
Lakshmanan S, Lim C, Nahavandi S, Prakash M, Balasubramaniam P (2017) Dynamical analysis of the Hindmarsh-Rose neuron with time delays. IEEE Trans Neural Netw Learn Syst 28:1953–1958
Tanaka G, Aihara K (2009) Complex-valued multistate associative memory with nonlinear multilevel functions for gray-level image reconstruction. IEEE Trans Neural Netw Learn Syst 20:1463–1473
Prakash M, Balasubramaniam P, Lakshmanan S (2016) Synchronization of Markovian jumping inertial neural networks and its applications in image encryption. Neural Netw 83:86–93
Xu C, Liu Z, Liao M, Li P, Xiao Q, Yuan S (2021) Fractional-order bidirectional associate memory (BAM) neural networks with multiple delays: The case of Hopf bifurcation. Math Comput Simul 182:471–494
Li X, Rakkiyappan R (2013) Impulsive controller design for exponential synchronization of chaotic neural networks with mixed delays. Commun Nonlinear Sci Numer Simul 18:1515–1523
Li H, Zhang L, Hu C, Jiang Y, Teng Z (2017) Dynamical analysis of a fractional-order predator-prey model incorporating a prey refuge. J Appl Math Comput 54:435–449
Wu G, Deng Z, Baleanu D, Zeng D (2019) New variable-order fractional chaotic systems for fast image encryption. Chaos 29:083103
Li R, Wu H (2018) Adaptive synchronization control based on QPSO algorithm with interval estimation for fractional-order chaotic systems and its application in secret communication. Nonlinear Dyn 92:935–959
Li H, Hu C, Zhang L, Jiang H, Cao J (2021) Non-separation method-based robust finite-time synchronization of uncertain fractional-order quaternion-valued neural networks. Appl Math Comput 409:126377
Yang X, Li C, Song Q, Chen J, Huang J (2018) Global Mittag-Leffler stability ang synchronization analisis of fractional-order quaternion-valued neural networks with linear threshold neurons. Neural Netw 105:88–103
Li H, Hu C, Zhang L, Jiang H, Cao J (2022) Complete and finite-time synchronization of fractional-order fuzzy neural networks via nonlinear feedback control. Fuzzy Sets Syst 443:50–69
Chen L, Cao J, Wu R, Machado J, Lopes A, Yang H (2017) Stability and synchronization of fractional-order memristive neural networks with multiple delays. Neural Netw 94:76–85
Yan H, Qiao Y, Duan L, Miao J (2022) New inequalities to finite-time synchronization analysis of delayed fractional-order quaternion-valued neural networks. Neural Comput Appl 34:9919–9930
Li H, Hu C, Cao J, Jiang H, Alsaedi A (2019) Quasi-projective and complete synchronization of fractional-order complex-valued networks with time delays. Neural Netw 118:102–109
Lakshmanan S, Prakash M, Lim C, Rakkiyappan R, Balasubramaniam P, Nahavandi S (2018) Synchronization of an inertial neural network with time-varying delays and its application to secure communication. IEEE Trans Neural Netw Learn Syst 29:195–207
Liu S, Zhang F (2014) Complex function projective synchronization of complex chaotic system and its applications in secure communication. Nonlinear Dyn 76:1087–1097
Wang X, Liu X, She K, Zhong S (2017) Finite-time lay synchronization of master-slave complex dynamical networks with unknown signal propagaton delays. J Frankl Inst 354:4913–4929
Xiao J, Zhong S, Li Y, Xu F (2017) Finite-time Mittag-Leffler synchronization of fractional-order memristive BAM neural networks with time delays. Neurocomputing 219:431–439
Chen C, Li L, Peng H, Yang Y (2017) Fixed-time synchronization of memristor-based BAM neural networks with time-varying discrete delay. Neural Netw 96:47–54
Pratap A, Raja R, Cao J, Rihan Fathalla A, Seadawy Aly R (2020) Quasi-pinning synchronization and stabilization of fractional order BAM neural networks with delays and discontinuous neuron activations. Chaos Solitons Fract 131:109491
Kilbas A, Srivastava H, Trujillo J (2006) Theory and application of fractional differential equations. Elsevier, New York
Zhang S, Yu Y, Wang H (2015) Mittag-Leffler stability of fractional-order hopfield neural networks. Nonlinear Anal Hybrid Syst 16:104–121
Yu J, Hu C, Jiang H (2015) Corrogendum to projective synchronization for fractional-order hopfield neural networks. Neural Netw 67:152–154
Li H, Jiang Y, Wang Z, Zhang L, Teng Z (2015) Mittag-Leffler stability of coupled system of fractional-order differential equations on network. Appl Math Comput 207:269–277
Zhang Y, Tan K (2004) Multistability of discrete-time recurrent neural networks with unsaturating piecewise linear activation functions. IEEE Trans Neural Netw Learn Syst 15:329–336
Chua L, Yang L (1988) Cellular neural networks: theory. IEEE Trans Cricuits Syst 35:1257–1272
Acknowledgements
This work is supported by the Tianshan Youth Program-Training Program for Excellent Young Scientific and Technological Talents (Grant No. 2019Q017), Project Funded by China Postdoctoral Science Foundation (Grant No. 2018M632205), the Scientific Research Program of the Higher Education Institution of Xinjiang (Grant Nos. XJEDU2017S001, XJEDU2021I002), the National Natural Science Foundation of China (Grant Nos. 11702237, 11861065, 61866036, 61963033).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, J., Li, HL., Zhang, L. et al. Synchronization analysis and parameters identification of uncertain delayed fractional-order BAM neural networks. Neural Comput & Applic 35, 1041–1052 (2023). https://doi.org/10.1007/s00521-022-07791-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07791-4