
Abstract
This paper considers asymptotic synchronization in an array of complex-variable chaotic systems, where node systems exhibit nonidentical nonlinear dynamics and subject to different stochastic perturbations. The effects of the differences among the node systems are overcome by designing a special adaptive discontinuous controller. By using Lyapunov stability theorem and stochastic properties, sufficient conditions are obtained to guarantee the synchronization. Finally, numerical simulations are given to show the effectiveness of the theoretical results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the literature, synchronization of coupled chaotic systems (CCSs) with real variables has attracted considerable attention in different areas including biological, information processing and secure communications [1–5]. At the same time, many effective control methods have been proposed to investigate synchronization of CCSs with real variables, such as impulsive control [6], state feedback control [7–9] and adaptive control [10–12], among which adaptive control receives widespread attention since its control gains can be automatically adjusted according to some designed update law.
Recently, increasing attention has been attracted to synchronization and control of CVCSs due to the fact that the CVCSs can evolve in different directions with a constant intersection angle and have wide applications in many fields such as optoelectronics, filtering, imaging, speech synthesis, computer vision and remote sensing [13–15]. For example, Wu et al. [16] investigated complex projective synchronization in coupled dynamical systems with complex variables based on a proper feedback controller. Liu et al. [17] investigated robust adaptive full-state hybrid synchronization of chaotic complex-valued systems with unknown parameters and nonidentical external disturbances. Combination synchronization of three chaotic systems with complex variables was investigated in [18]. Drive-response synchronization for a class of complex-variable chaotic systems with uncertain parameters was studied in [19] via adaptive and impulsive controls.
It should be noted that the node systems in the above-mentioned papers concerning CVCSs are identical. From practical point of view, it is not always reasonable to assume that all the nodes in a network are identical since some real-world complex networks may consist of different type nodes and the nodes usually have different physical parameters [20]. Although there are some results on synchronization of coupled real-valued chaotic systems with nonidentical node systems in the literature [9, 21], to the best of our knowledge, few papers consider the issue of synchronization in an array of CVCSs with nonidentical nodes. On the other hand, stochastic perturbations to node systems are always unavoidable and may also be nonidentical since the effects of environments on each node system are different. Theoretically, it is difficult to synchronize a network with both nonidentical node systems and nonidentical stochastic perturbations, which can further improve the security of the transmitted signals in a network. However, seldom author considers synchronization of networks coupled with nonidentical complex-valued chaotic systems suffered to nonidentical stochastic perturbations.
Motivated by the above discussions, this paper aims to investigate synchronization in an array of coupled nonidentical CSCVs and nonidentical stochastic perturbations. A simple adaptive discontinuous controller is designed to overcome the effects of the differences among the coupled nodes and synchronize the network onto a nonidentical chaotic system with complex variables. Based on Lyapunov stability theorem and stochastic theory, sufficient conditions are obtained to ensure the synchronization. Numerical simulations are given to show the effectiveness of the theoretical results.
The rest of this paper is organized as follows. In Sect. 2, a network coupled with nonidentical CSCVs with different stochastic perturbations is proposed. Some necessary assumptions and lemmas are also given in this section. In Sect. 3, synchronization of the network is studied. Then, numerical simulations are given in Sect. 4 to demonstrate the effectiveness of theoretical results. Finally, Sect. 5 gives conclusions.
2 Notations
The notations in this paper are quite standard. \(\mathbb {C}^n\) denotes a set of n-dimensional complex vectors. For \(x\in \mathbb {C}^n\), \(x^R\) and \(x^I\) denote the real and imaginary parts of x, respectively, \(\bar{x}\) denotes the complex conjugate of x, \(\Vert .\Vert \) is the Euclidean norm, i.e., \( \Vert x\Vert =\sqrt{x^T \bar{x}}\), and \(\mathbb {R}^n\) denotes the n-dimensional Euclidean space. The superscript T denotes transposition of a matrix or vector. \(I_n\) is the \(n\times n\) identity matrix. \(A=(a_{ij})_{N\times N}\) denotes matrix of N-dimension, \(\Vert A\Vert =\sqrt{\lambda _{\max }(A^T \bar{A})}\), \(\lambda _{\max }(A)\) means the largest eigenvalue of A, \(A^s=\frac{1}{2}(\bar{A}+A^T)\). Moreover, let \((\Omega , \mathcal {F}, \{\mathcal {F}_t\}_{t\ge 0},P)\) be a complete probability space with filtration \(\{\mathcal {F}_t\}_{t\ge 0}\) that satisfy the usual conditions (i.e., the filtration contains all P-null sets and is right continuous). Denote by \(L_{\mathcal {F}_0}^P([-\kappa ,0];\mathbb {C}^n)\) the family of all \(\mathcal {F}_0\)-measurable \(C([-\kappa ,0];\mathbb {C}^n)\)-valued random variables \(\zeta =\{\zeta (s):-\kappa \le s\le 0 \}\) such that \(\mathrm {sup}_{-\kappa \le s\le 0}\mathbb {E}\Vert \zeta (s)\Vert ^p<\infty \), where \(\mathbb {E}\{.\}\) stands for the mathematical expectation with respect to the given probability measure P.
3 Preliminaries
Consider a network coupled with CVCSs which is described as follows:
where \(x_i(t)=(x_{i1} (t),x_{i2} (t),\dots ,x_{in} (t))^{T}\in \mathbb {C}^{n}\) is an n-dimensional complex vector with \(x_{il}(t)=x_{il}^R(t)+j x_{il}^I(t)\), \(l=1,2,\dots ,n\), \(x_{il}^R(t)\) and \(x_{il}^I(t)\) are real and imaginary parts of \(x_{il}\), respectively, \(j=\sqrt{-1}\); \(f_i:\mathbb {C}^n\rightarrow \mathbb {C}^n\) is nonlinear complex-valued vector function, where \(f_i\) can be different from \(f_j\) if \(i\ne j\). \(\delta _i(t)\) is the noise intensity matrix function; \(\omega _i(t)=(\omega _{i1}, \omega _{i2}, \dots , \omega _{in})\in R^n\) is a vector-form Wiener process defined on a complete probability space \((\Omega ,\mathcal {F},\mathcal {F}_{t\ge 0},P)\); \(U_i(t)\) is the controller to be designed; the constant matrix \(\Lambda =(\Lambda _{ij})_{n\times n}\) describes the inner-coupling matrix of the network; \(\varrho \) represents the coupling strength; matrix \(A=(a_{ij})_{N\times N}\) stands for the coupling of the whole network. If there is a connection from node i to node j \((i\ne j)\), then \(a_{ij}>0\); otherwise, \(a_{ij}=0\) \((i\ne j)\) and the diagonal elements of matrix A are defined as \(a_{ii}=-\sum _{j=1, j\ne i}^N a_{ij}\).
Our goal is to synchronize the states of the network (1) onto the complex-variable manifold:
where \(y(t)=(y_1(t),y_2(t),\dots ,y_n(t))^{T}\in \mathbb {C}^{n}\), \(g(y(t))=(g_1(y(t)),g_2(y(t)),\dots ,g_n(y(t)))\in \mathbb {C}^n\).
Definition 1
[22]. The coupled network (1) is said to be globally asymptotically synchronized onto (2) if
hold for any given initial condition.
Let \(e_i(t)=x_i(t)-y(t)\), \(i=1,2,\dots ,N\). It can obtain the following error system by subtracting (2) from (1).
where \(\overline{f}_i(e_i(t))=f_i(x_i(t))-f_i(y(t))\), \(\Sigma _i(t)=f_i(y(t))-f(y(t))\).
For convenience of study, the error system (3) is separated into real and imaginary parts. Let \(e_i(t)=e_i^R(t)+je_i^I(t)\), \(\overline{f}_i(e_i(t))=\overline{f}_i^R(e_i(t))+j\overline{f}_i^I(e_i(t))\), and \(U_i(t)=U_i^R(t)+jU_i^I(t)\), \(\Sigma _i(t)=\Sigma _i^R(t)+j\Sigma _i^I(t)\), \(\delta _i(t)=\delta _i^R(t)+j\delta _i^I(t)\). Then the following two real-valued systems can be obtained from (3):
Denote \(z(t)=(z_1(t),\dots ,z_N(t),z_{N+1}(t),\dots ,z_{2N}(t))^T=((e^R(t))^T,(e^I(t))^T)^T\). It follows from (4) and (5) that
where \((\hat{f}_1(z_1(t)),\dots ,\hat{f}_1(z_N(t))\), \(\hat{f}_{N+1}(z_{N+1}(t)),\dots ,\) \(\hat{f}_{2N}(z_{2N}(t)))^T= (\overline{f}_1^R(e_1^R(t)),\dots \), \(\overline{f}_N^R(e_N^R(t)),\) \(\overline{f}_1^I(e_1^I(t)), \dots ,\overline{f}_N^I(e_N^I(t))\), \(\overline{A}=(\overline{a}_{kj})_{2N\times 2N}=\mathrm {diag}(A,A)\), \((\bar{U}_1(t),\dots ,\bar{U}_N(t),\bar{U}_{N+1}(t),\dots ,\bar{U}_{2N}(t)),=(U_1^R(t),\dots ,U_N^R(t),U_1^I(t),\dots ,U_N^I(t)\), \((\overline{\Sigma }_1(t),\dots ,\overline{\Sigma }_N(t),\overline{\Sigma }_{N+1}(t),\dots ,\overline{\Sigma }_{2N}(t))= (\Sigma _1^R(t),\dots ,\Sigma _N^R(t),\Sigma _1^I(t),\dots ,\Sigma _N^I(t))\).
As far as the authors’ knowledge, most of the existing results on synchronization of coupled CVCSs only focus on identical node systems. Obviously, synchronization control of coupled nonidentical CVCSs is more difficult than that of coupled CVCSs with identical nodes. In order to obtain synchronization criterion for the network (1), the complex-variable error system (3) has been transformed into real-variable error system (6). To proceed our study, the following assumptions are needed.
\((H_{1})\) There exist nonnegative constants \(h_k\) such that \(\Vert \hat{f}_k(u)\Vert \le h_k \Vert u\Vert \), where \(u\in \mathbb {R}^{n}\), \(k=1,2,\dots ,2N\).
\((H_{2})\) There exist nonnegative constants \(\mu _{kj}\) such that, for \(k=1,2,\dots ,2N\),
\((H_{3})\) Systems (1) and (2) are chaotic, and there exist positive constants \(M_{kj}\), \(\overline{M}_j\) such that \(|f_{kj}(y(t))|\le M_{kj}\), \(|f_j(y(t))|\le \overline{M}_j\), \(k=1,2,\dots ,2N\), \(j=1,2,\dots ,n\).
As for Wiener process, the following properties are useful [2, 23].
(1) \(\mathbb {E}\{\bar{\sigma }_k(t)\mathrm {d}\bar{\omega }_k\}=0, (\bar{\sigma }_k(t)\mathrm {d}\bar{\omega }_k)^T(\bar{\sigma }_k(t)\mathrm {d}\bar{\omega }_k)=\mathrm {trace}(\bar{\sigma }_k(t)^T\bar{\sigma }(t))\mathrm {d}t\);
(2) Suppose that \(V=V(x(t))\) is a scalar function, which \(x=(x_1,x_2,\dots ,x_n)^T\). The differential form of V is obtained as
In expansion of the above equation, the following algebraic operation is used: \(\mathrm {d}t\mathrm {d}t=0\), \(\mathrm {d}t \mathrm {d}\bar{\omega }_{kj}=0\), \(\mathrm {d}\bar{\omega }_{kj} \mathrm {d}\bar{\omega }_{kj}=dt\), \(\mathrm {d}\bar{\omega }_{kj}\mathrm {d}\bar{\omega }_{kl}=0\) \((j\ne l)\).
4 Main results
In this section, based on the Lyapunov stability theorem, general criterion for synchronization of coupled nonidentical CVCSs will be obtained. Rigorous mathematical proofs are also given.
Theorem 1
Suppose that conditions \((H_{1})-(H_{3})\) are satisfied. Then, with the controller
and adaptive law
the network (1) can be globally asymptotically synchronized onto (2), where \(\alpha >1\), \(\varepsilon _k>0\), \(\eta _k>0\) are small constants, and \(\mathrm {sign}(\cdot )\) is the sign function.
Proof
Consider the following Lyapunov function:
Differentiating V(t) along the solution of (6) and taking the expectations on both sides, one obtains that
It can be obtained from \((H_{1})\) and \((H_{2})\) that
where \(\rho _{\min }\) is the minimum eigenvalue of \(\Lambda ^s\).
By (10) and \((H_{3})\), one has
where \(q_k\ge \max (M_{kj}+\overline{M}_j)\), \(k=1,2,\dots ,2N, j=1,2,\dots ,n\).
The inequalities (10) and (11) imply that
where \(\overline{z}(t)=(\Vert z_1(t)\Vert ,\Vert z_2(t)\Vert ,\dots ,\Vert z_{2N}(t)\Vert )^T\), \(\widetilde{A}=(\tilde{a}_{kj})_{2N\times 2N}\), \(\tilde{a}_{kj}=\bar{a}_{kj},k\ne j\), \(\tilde{a}_{kk}=\frac{\rho _{\min }}{\Vert \Lambda \Vert }\bar{a}_{kk}\), \(H=\mathrm {diag}(h_1,h_2,\dots ,h_{2N})\), \(\bar{P}=\mathrm {diag}(p_1,p_2,\dots ,p_{2N})\), \(\Phi =(\mu _{kj})_{2N\times 2N}\).
Let \(p_k=h_k+\lambda _{\max }(\Vert \Lambda \Vert \widetilde{A}+\Phi )+1\), \(k=1,2,\dots ,2N\). One has
Hence,
This completes the proof. \(\square \)
When the node systems in the network (1) and the isolated system (2) are identical, the following corollary 1 can be directly obtained from Theorem 1.
Corollary 1
Assume that the conditions \((H_{1})-(H_{3})\) are satisfied and \(\hat{f}_1(z_1(t))=\hat{f}_2(z_2(t))=\dots =\hat{f}_{2N}(z_{2N}(t))\). Then the coupled system (1) can be globally asymptotically synchronized onto (2) with the controller (7) and adaptive law (8)
Remark 1
From the proof of Theorem 1, one can see that the discontinuous term \(\alpha \beta _k(z_k(t))\) in controller (7) plays an important role in realizing the synchronization. The inequality (11) shows that the discontinuous term can overcome the effect of nonidentical dynamics. Since node systems in real-world networks are always nonidentical, Theorem 1 is more general than those in [16–19].
5 Numerical examples
In this section, we provide one example to show that our theoretical results obtained above are effective.
Consider Chen system complex variables which are described as [24]:
where \(y(t)=(y_{1}(t),y_{2}(t),y_{3}(t))^{T}\), \(y_1(t)\) and \(y_2(t)\) are complex variables, \(y_3(t)\) is real, \(\overline{g}(y(t))=[0,-y_1(t)y_3(t), \frac{\overline{y}_1(t)y_2(t)+y_1(t)\overline{y}_2(t)}{2}]^T\),
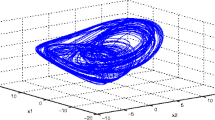
Figure 1 shows the chaotic trajectory of (15) with initial value \(y(0)=(12+j,10+4*j,15)^T\).

Trajectory of (15) with initial conditions: \(y_{1}(0)=12+j, y_{2}(0)=10+4*j, y_{3}(0)=15\)
Complex-valued Lorenz system is presented as [25]:
where \(x(t)=(x_{1}(t),x_{2}(t),x_{3}(t))^{T}\), \(x_1(t)\) and \(x_2(t)\) are complex variables, \(x_3(t)\) is real, \(\widetilde{f}(x(t))=[0,-x_1(t)x_3(t),\frac{\overline{x}_1(t)x_2(t)+x_1(t)\overline{x}_2(t)}{2}]^T\),
Figure 2 presents the chaotic trajectory of (16) with initial value \(x(0)=(4+j,3+5*j,8)^T\).

Trajectory of (16) with initial conditions: \(x_{1}(0)=4+j, x_{2}(0)=3+5*j, x_{3}(0)=8\)
Complex-valued L\(\ddot{u}\) system is described by [26]
where \(x(t)=(x_{1}(t),x_{2}(t),x_{3}(t))^{T}\), \(x_1(t)\) and \(x_2(t)\) are complex variables, \(x_3(t)\) is real, \(\check{f}(x(t))=[0,-x_1(t)x_3(t),\frac{\overline{x}_1(t)x_2(t)+x_1(t)\overline{x}_2(t)}{2}]^T\),

Trajectory of (17) with initial conditions: \(x_{1}(0)=8+j, x_{2}(0)=5+4*j, x_{3}(0)=7\)

The time responses of the synchronization errors \(z_{k1}(t)\) (left) and \(z_{k2}(t)\) (right), \(k=1,2,\dots ,20\) in (19)
Figure 3 describes the chaotic trajectory of (17) with initial value \(x(0)=(8+j,5+4j,7)^T\).
Consider a controlled network consisting of the above two types of nonidentical chaotic nodes (16) and (17) as follows:
where \(x_i(t)=(x_{i1}(t),x_{i2}(t),x_{i3}(t))^T\), \(\Lambda =\mathrm {diag}(1,1,1)\), \(\varrho =1\), the noise intensity function matrix is \(\delta _i(t)=\mathrm {diag}(x_{i1}(t)-x_{i+1,1}(t),x_{i2}(t)-x_{i+1,2}(t),x_{i3}(t)-x_{i+1,3}(t)) \), and the outer coupling matrix A is
and
It follows that

The time responses of the synchronization errors \(z_{k3}(t)\), \(k=1,2,\dots ,20\) in (19)

The trajectories of control gains \(l_k(t)\) (left) and \(\beta _k(t)\) (right), \(k=1,2,\dots ,20.\) of (7)
It is easy to see that \(\hat{f}_i(z_i(t))\) satisfies the condition \((H_1)\). Figures 1, 2 and 3 show that the states of the considered systems are finite, which implies that the assumption \((H_3)\) is satisfied. Now we verify the assumption \((H_2)\). From the noise intensity function matrix in (18), one has that
Hence \((\mathrm {H}_2)\) is satisfied.
According to Theorem 1, (18) can be synchronized onto (15) under the controller (7) with update law (8).
Taken parameters in the numerical simulations are: Step length is 0.0001, \(\Lambda =\mathrm {diag}(1,1,1)\), \(l_k=2\), \(\beta _k=1\), \(k=1,2,\dots ,20\), \(\varepsilon _k=0.005\), \(\eta _k=2.5\), \(k=1,2,\dots ,10\), \(\varepsilon _k=0.001\), \(\eta _k=2.2\), \(k=11,12,\dots ,20\) \(\alpha =6\). Choosing the initial values of chaotic system randomly in the interval \([-3,3]\), we obtain the simulation results shown in Figs. 4 and 5, which demonstrate that the synchronization is realized. Figure 6 presents the time evolution of the control gains \(l_k(t)\), \(\beta _k(t)\), \(k=1,2,\dots ,20\), from which one can see that all the control gains approach to some constants when the synchronization has been realized.
6 Conclusions
Synchronization of coupled nonidentical complex-valued chaotic systems suffered to different stochastic perturbations has been investigated in this paper. The designed adaptive controller can restrict the effects of the nonidentical dynamics and nonidentical stochastic perturbations. Based on Lyapunov stability theorem and the properties of stochastic differential equations, several synchronization criteria have been derived. Some existing results on synchronization of coupled identical chaotic systems with complex variables are extended. Numerical simulations verify the effectiveness of the theoretical results.
References
Liao, T.L., Huang, N.S.: An observer-based approach for chaotic synchronization with applications to secure communications. IEEE Trans. Circuits Syst. I 46(9), 1144–1150 (1999)
Yang, X.S., Cao, J.D.: Stochastic synchronization of coupled neural networks with intermittent control. Phys. Lett. A 373(36), 3259–3272 (2009)
Strogatz, S.H., Stewart, I.: Coupled oscillators and biological synchronization. Sci. Am. 269(6), 102–109 (1993)
Ma, J., Song, X., Jin, W., Wang, C.: Autapse-induced synchronization in a coupled neuronal network. Chaos Solitons Fractals 80, 31–38 (2015)
Abeles, M., Prut, Y., Bergman, H., Vaadia, E.: Synchronization in neuronal transmission and its importance for information processing. Prog. Brain Res. 102, 395–404 (1994)
Yang, X.S., Yang, Z.C., Nie, X.B.: Exponential synchronization of discontinuous chaotic systems via delayed impulsive control and its application to secure communication. Commun. Nonlinear Sci. Numer. Simul. 19(5), 1529–1543 (2014)
Kristian, H.M., Frank, L.L., Michael, S.: Distributed static output-feedback control for state synchronization in networks of identical LTI systems. Automatica 53, 282–290 (2015)
Jin, X.Z., Yang, G.H.: Robust synchronization control for complex networks with disturbed sampling couplings. Commun. Nonlinear Sci. Numer. Simul. 19(6), 1985–1995 (2014)
Yang, X.S., Wu, Z.Y., Cao, J.D.: Finite-time synchronization of complex networks with nonidentical discontinuous nodes. Nonlinear Dyn. 73(4), 2313–2327 (2013)
Sun, H.Y., Li, N., Zhao, D.P., Zhang, Q.L.: Synchronization of complex networks with coupling delays via adaptive pinning intermittent control. Int. J. Autom. Comput. 10(4), 312–318 (2013)
Ma, J., Zhang, A.H., Xia, Y.F., et al.: Optimize design of adaptive synchronization controllers and parameter observers in different hyperchaotic systems. Appl. Math. Comput. 215(9), 3318–3326 (2010)
Yang, X.S., Cao, J.D., Long, Y., Rui, W.R.: Adaptive lag synchronization for competitive neural networks with mixed delays and uncertain hybrid perturbations. IEEE Trans. Neural Netw. 21(10), 1656–1667 (2010)
Tanaka, G., Aihara, K.: Complex-valued multistate associative memory with nonlinear multilevel functions for gray-level image reconstruction. IEEE Trans. Neural Netw. 20(9), 1463–1473 (2009)
Tripathi, B.K., Kalra, P.K.: On efficient learning machine with root-power mean neuron in complex domain. IEEE Trans. Neural Netw. 22(5), 727–738 (2011)
André, R.B., Dalcimar, C., Odemir, M.B.: Texture analysis and classification: a complex network-based approach. Inf Sci 219(10), 168–180 (2013)
Wu, Z.Y., Duan, J.Q., Fu, X.C.: Complex projective synchronization in coupled chaotic complex dynamical systems. Nonlinear Dyn. 69, 771–779 (2012)
Liu, P., Liu, S.T.: Robust adaptive full state hybrid synchronization of chaotic complex systems with unknown parameters and external disturbances. Nonlinear Dyn. 70(1), 585–599 (2012)
Sun, J.W., Cui, G.Z., Wang, Y.F., Shen, Y.: Combination complex synchronization of three chaotic complex systems. Nonlinear Dyn. 79(2), 953–965 (2015)
Liu, D.F., Wu, Z.Y., Ye, Q.L.: Adaptive impulsive synchronization of uncertain drive-response complex-variable chaotic systems. Nonlinear Dyn. 75, 209–216 (2014)
Zhao, J., Hill, D.J., Liu, T.: Synchronization of dynamical networks with nonidentical nodes: criteria and control. IEEE Trans. Circuits Syst. I 58(3), 584–594 (2011)
Lu, W.L., Liu, B., Chen, T.P.: Cluster synchronization in networks of coupled nonidentical dynamical systems. Chaos 20(1), 013120 (2010)
Yang, X.S., Cao, J.D., Lu, J.: Synchronization of randomly coupled neural networks with Markovian jumping and time-delay. IEEE Trans. Circuits Syst. I 60(2), 363–376 (2013)
Salarieh, H., Alasty, A.: Adaptive synchronization of two chaotic systems with stochastic unknown parameters. Commun. Nonlinear Sci. Numer. Simul. 14(2), 508–519 (2009)
Mahmoud, G.M., Bountis, T., Mahmoud, E.E.: Active control and global synchronization of the complex Chen and Lü systems. Int. J. Bifurc. Chaos 17(12), 4295–4308 (2007)
Aly, S., Qahtani, A.A., Khenous, H.B., Mahmoud, G.: Impulsive control and synchronization of complex Lorenz systems. Abstract and Applied Analysis. art. ID: 932327 (2014)
Wu, Z.Y., Liu, D.F., Ye, Q.L.: Pinning impulsive synchronization of complex-variable dynamical network. Commun. Nonlinear Sci. Numer. Simul. 20(1), 273–280 (2015)
Acknowledgments
This work is supported by the National Natural Science Foundation of China (NSFC) (Grant No. 61263020).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wu, E., Yang, X. Adaptive synchronization of coupled nonidentical chaotic systems with complex variables and stochastic perturbations. Nonlinear Dyn 84, 261–269 (2016). https://doi.org/10.1007/s11071-015-2433-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2433-2