
Abstract
In this paper, we study a three-dimensional stochastic vegetation–water model in arid ecosystems, where the soil water and the surface water are considered. First, for the deterministic model, the possible equilibria and the related local asymptotic stability are studied. Then, for the stochastic model, by constructing some suitable stochastic Lyapunov functions, we establish sufficient conditions for the existence and uniqueness of an ergodic stationary distribution \(\varpi (\cdot )\). In a biological interpretation, the existence of the distribution \(\varpi (\cdot )\) implies the long-term persistence of vegetation under certain conditions. Taking the stochasticity into account, a quasi-positive equilibrium \(\overline{D}^*\) related to the vegetation-positive equilibrium of the deterministic model is defined. By solving the relevant Fokker–Planck equation, we obtain the approximate expression of the distribution \(\varpi (\cdot )\) around the equilibrium \(\overline{D}^*\). In addition, we obtain sufficient condition \(\mathscr {R}_0^E<1\) for vegetation extinction. For practical application, we further estimate the probability of vegetation extinction at a given time. Finally, based on some actual vegetation data from Wuwei in China and Sahel, some numerical simulations are provided to verify our theoretical results and study the impact of stochastic noise on vegetation dynamics.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Desertification, as a process of land degradation, is formed by human activity structure and irregular climatic variations under the condition of arid and semi-arid areas (London and Unep 1994). In recent few decades, land desertification has been one of the worldwide ecological environmental issues and become increasingly serious (Hautier et al. 2015). According to statistics reported by the United Nation’s Division for Sustainable Development (UNDSD), land desertification has led to a decline in living standards of approximately 25% of the world’s population (Chen et al. 2021; Dai 2013). Worse yet, the area of semi-arid regions in recent years is at least 7% larger than that in 1960s (Huang et al. 2016). In particular, the total area of arid and semi-arid land accounts for about 24.6% of China (Li et al. 2004). Thus, an urgent task is to provide effective strategies to prevent land desertification and prompt the restoration of degraded ecosystems.
Theoretically, mathematical modeling is an important tool for studying the mechanism of desertification formation and providing some dynamical schemes to curb land desertification (Chen et al. 2021; Shnerb et al. 2003; May 1977; Marinov et al. 2013; Gilad et al. 2007; Saco et al. 2007; Kefi et al. 2008, 2010; Sun et al. 2013). Taking the evaporation of water and the consumption of herbivores into account, Shnerb et al. (2003) initially proposed a two-dimensional vegetation–water model, namely the S2003 model. Marinov et al. (2013) further studied the global stability of the possible equilibria of the S2003 model and obtained the existence of non-trivial periodic vegetation states when the rainfall rate maintains at an appropriate level. But in fact, most of the rain first falls on the soil surface and become soil water through the infiltration, then being absorbed by the plants through the capillary action of plant roots (Gilad et al. 2007). In this sense, Saco et al. (2007) introduced two monotonically increasing concave functions to describe the water infiltration and the capillary action of plant roots, respectively. Considering the additional root-augmentation feedback, Kefi et al. (2008, 2010) further established a three-variable vegetation–water model that distinguishes between soil water and surface water, which is usually named as K2008 model. Moreover, they analyzed the possible mechanism and bistability of desertification formation under three future climatic scenarios predicted by the Hadley Center Cox et al. (2000). Recently, Chen et al. (2021) applied the K2008 model to study the influences of temperature and precipitation change on the vegetation patterns of Wuwei (37.4N, 103.1E) in China. Moreover, it was numerically proved that the K2008 model can well describe the local vegetation state according to the local image of Wuwei taken from Google Earth.
However, the majority of the research results obtained by these models above are mainly experimental results, and there is a lack of quantitative analysis of the desertification restoration problem. That is to say, some theoretical dynamical behavior of a vegetation–water model should be analyzed for better practical application in arid and semi-arid ecosystems, such as long-term persistence of vegetation, vegetation extinction and the related mean extinction time. Thus, in this paper, we will show some dynamical analysis for the existing vegetation–water models with good applicability (K2008 model as a case). Motivated by the idea of K2008 model mentioned in Chen et al. (2021), Kefi et al. (2008), Kefi et al. (2010), let P(t), W(t) and S(t) be the vegetation density \((\hbox {g}/\hbox {m}^2)\), soil water volume (mm) and surface water volume (mm) at time t, respectively. A deterministic vegetation–water model with non-runoff then takes the following form:
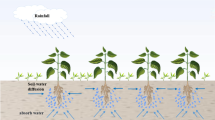
where \(R_\mathrm{esp}\) is the average loss rate including consumption of herbivores and autotrophic respiration in plants. \(r_\mathrm{w}\) denotes the average loss rate of soil water due to drainage and evaporation. R is the average rainfall rate. The infiltration capacity \(I_\mathrm{r}\) of water is denoted by the term \(\frac{\alpha (P+k_2w_0)S}{P+k_2}\) with the maximum infiltration rate \(\alpha \) and the infiltration saturation constant \(k_2\). Moreover, \(w_0\in (0,1)\) is the measure of the infiltration contrast between vegetated and bare soils. The term \(\frac{q\alpha _2g_{\mathrm{H}_2\mathrm{O}}\text {WP}}{W+k_1}\) denotes the water conductance capacity \(T_\mathrm{r}\), which results from the difference between saturated and actual specific humidity. \(\alpha _2\) is the conversion rate of roots, q denotes the positive humidity difference, and \(k_1\) is the half-saturated constant of water uptake. \(g_{\mathrm{co}_2}\) and \(g_{\mathrm{H}_2\mathrm{O}}\) separately denotes the leaf conductance to \(\hbox {CO}_2\) and \(\hbox {H}_2\hbox {O}\), which satisfy \(g_{\mathrm{H}_2\mathrm{O}}=\gamma g_{\mathrm{co}_2}\) with \(\gamma \) denoting the conversion coefficient for the molecular diffusivities of \(\hbox {CO}_2\) and \(\hbox {H}_2\hbox {O}\) Kefi et al. (2008). The term \(\frac{c\alpha _2g_{\mathrm{co}_2}WP}{W+k_1}\) describes the carbon gain capacity of vegetation biomass, where c is the carbon gain rate. In addition, the units of the above parameters are presented in Table 1, and the relevant schematic diagram of system (1.1) is shown in Fig. 1.
In this paper, we define a critical value by \({\mathscr {R}}_0=\frac{c\alpha _2g_{\mathrm{co}_2}R}{(R+r_\mathrm{w}k_1)R_\mathrm{esp}}\). By a standard argument (Chen et al. 2021; Kefi et al. 2008), system (1.1) has a vegetation-free equilibrium \(D_0=(P_0,W_0,S_0)=(0,\frac{R}{r_\mathrm{w}},\frac{R}{\alpha w_0})\), which always exists. In addition to the equilibrium \(D_0\), a unique vegetation-positive equilibrium \(D^*=(P^*,W^*,S^*)=(\frac{c}{q\gamma }(\frac{R}{R_\mathrm{esp}}-\frac{r_\mathrm{w}k_1}{c\alpha _2g_{\mathrm{co}_2}-R_\mathrm{esp}}),\frac{k_1R_\mathrm{esp}}{c\alpha _2g_{\mathrm{co}_2}-R_\mathrm{esp}},\frac{R(P^*+k_2)}{\alpha (P^*+k_2w_0)})\) will exist in system (1.1) when \(c\alpha _2g_{\mathrm{co}_2}>R_\mathrm{esp}\) and \(R>\frac{r_\mathrm{w}k_1R_\mathrm{esp}}{c\alpha _2g_{\mathrm{co}_2}-R_\mathrm{esp}}\), which are equivalent to \({\mathscr {R}}_0>1\).

The schematic diagram of deterministic vegetation–water system (1.1)
It should be noted that the system (1.1) is established under a constant ecological environment. However, due to a continuous spectrum of disturbances in the actual situation (Beddington and May 1977), many of the main parameters in vegetation evolution, such as the rainfall rate, the intensity of grazing and the photosynthetic capacity, are not constants but rather fluctuate around some average values (Guttal and Jayaprakash 2007). Thus, it is important to study randomly perturbed vegetation–water models (Pan et al. 2022). So far, only a few stochastic vegetation–water models have been formulated to analyze the impact of stochastic noise on vegetation dynamics (Guttal and Jayaprakash 2008; Zhang et al. 2019; Han et al. 2014; Pan et al. 2020; Zhang et al. 2020). Specifically, Guttal and Jayaprakash (2008) established a two-dimensional stochastic vegetation–water model with density-dependent effect, which is usually named as G2008 model. Recently, considering the random perturbations of the density-dependent effect and the rainfall rate, Zhang et al. (2019) developed a modified version of the G2008 model, and studied the transient dynamic properties of the stochastic system in terms of two important indexes including the first escape probability (FEP) and the mean first exit time (MFET). Moreover, it was numerically proved that the increase of noise intensity decreases basin stability of the vegetation–water system. Considering adding two factors, the pulse control strategy and the random perturbation of the growth response function of vegetation, in the G2008 model, Zhang et al. (2020) obtained the sufficient conditions for vegetation persistence and extinction in the mean sense. Based on the ecological model with runoff mentioned in Liu et al. (2019) and the linear perturbation approach proposed by Imhof and Walcher (2005), Pan et al. (2020) established a two-dimensional stochastic vegetation–water system with runoff, and theoretically obtained the sufficient and necessary conditions for the system’s near-optimal control problem (i.e., higher vegetation density and water density can be obtained at the lowest cost). Clearly, all the dimensions of the above stochastic vegetation–water models are no more than two dimensions.
As far as we know, no relevant investigations concerning the impact of stochastic noise on three-dimensional system (1.1) have been published yet, which is possibly resulted from the complexity of the system. Thus, in this paper, we will examine a stochastic version of system (1.1) from both transient and stationary dynamics perspectives. In practice, the loss rate \(R_\mathrm{esp}\) of vegetation, the loss rate \(r_\mathrm{w}\) of soil water and the rainfall rate R are three key parameters of vegetation evolution. In this sense, \(R_\mathrm{esp}\), \(r_\mathrm{w}\) and R should be regarded as three random variables \({\widetilde{R}}_\mathrm{esp}\), \({\widetilde{r}}_\mathrm{w}\) and \({\widetilde{R}}\), respectively. Currently, the linear and second-order perturbation approaches are two well-established ways of introducing stochastic noise into biologically realistic dynamic models (Zhang and Zhang 2020; Liu et al. 2020; Cai et al. 2017; Zu et al. 2018; Han et al. 2020; Liu and Jiang 2018; Liu et al. 2018). Inspired by the fact, we assume that \({\widetilde{R}}_\mathrm{esp}\), \({\widetilde{r}}_\mathrm{w}\) and \({\widetilde{R}}\) separately fluctuate around the average values \(R_\mathrm{esp}\), \(r_\mathrm{w}\) and R, and satisfy
where \(B_i(t)\ (i=1,2,3)\) are three independent Brownian motions with \(\sigma _i>0\) denoting their intensities. The expressions (i)–(ii) can be derived by the linear perturbation approach (Liu et al. 2020; Cai et al. 2017), and the form of (iii) is based on the second-order perturbation approach (Zu et al. 2018; Liu and Jiang 2018). From (i), for any time interval \([t,t+\tau )\), \(-{\widetilde{R}}_\mathrm{esp}\tau \) is normally distributed with mean \({\mathbb {E}}(-{\widetilde{R}}_\mathrm{esp}\tau )=-R_\mathrm{esp}\tau \) and variance Var\((-{\widetilde{R}}_\mathrm{esp}\tau )=\sigma _1^2\tau \). Hence, the stochastic term \(-{\widetilde{R}}_\mathrm{esp}\tau \) will fluctuate around an average value \(-R_\mathrm{esp}\tau \) for some small \(\tau \), and its variance (i.e., the fluctuation intensity) will tend to zero if \(\tau \rightarrow 0\), implying that (i) is a biologically reasonable assumption involved in the stochasticity. The analysis of (ii) can be completely analogous to (i). Moreover, the relevant biological explanation of (iii) can be obtained from Zu et al. (2018), Han et al. (2020) and is omitted here.
Thus, we replace \(-R_\mathrm{esp}dt\), \(-r_\mathrm{w}dt\) and Rdt in system (1.1) with \(-{\widetilde{R}}_\mathrm{esp}dt\), \(-{\widetilde{r}}_\mathrm{w}dt\) and \({\widetilde{R}}dt\), respectively. Combined with (i)–(iii), the stochastic version of system (1.1) then takes the following form:
where \(B_i(t)\) and \(\sigma _i\ (i=1,2,3)\) are the same as above. Moreover, \(B_i(t)\ (i=1,2,3)\) are all defined on a complete probability space \( \{\Omega ,{\mathscr {F}},\{{\mathscr {F}}_t\}_{t\ge 0},{\mathbb {P}}\} \) with an increasing and right continuous \(\sigma \)-field filtration \( \{{\mathscr {F}}_t\}_{t\ge 0} \) (Mao 1997).
The primary purpose of this paper is to investigate system (1.2) from both long-term and transient dynamics perspectives. In the study of long-term dynamics of vegetation, on the one hand, the stability of the positive equilibrium state, which means that the vegetation in the deterministic model can stably coexist with other environmental variables (Marinov et al. 2013), is a very important topic in ecological protection. On the other hand, when stochastic noise is taken into account, the positive equilibrium states of most stochastic ecological models will no longer exist. Hence, there is a need to investigate the stability of the “stochastic positive equilibrium state” of stochastic vegetation–water models, namely the existence of a stationary distribution of their stochastic solutions (Pan et al. 2022). However, to the best of our knowledge, no relevant theoretical analysis has been reported yet in terms of the stability of the equilibria \(D_0\) and \(D^*\) in the deterministic system (1.1) and the existence of a stationary distribution of the stochastic system (1.2). To this end, in this paper, we will try to fill the gap. Furthermore, to better predict the statistical characteristics of vegetation dynamics in arid ecosystems, such as the index FEP (Zhang et al. 2020a) of basin stability, the probability density function of the stationary distribution should be studied. In fact, the density function is determined by the Fokker–Planck equation, but the equation will often be difficult to solve for complex stochastic models. Thus, some new techniques should be developed to overcome the difficulty.
In the study of transient dynamics of vegetation, an interesting but challenging problem is to estimate the average residence time of the solution trajectory escaping from high vegetation state to low vegetation state even bare vegetation state (i.e., extinction) (Zhang et al. 2019), which can provide an early warning to make people take some effective measures such as artificial rainfall, to suppress the emergence of land desertification. So far, very few studies have directly analyzed the impact of stochastic noise on the average residence time of the state shifts of vegetation, and these analysis are only established under the stationary state shifts of several one-dimensional vegetation model (Zhang et al. 2020a, b). For example, Zhang et al. (2020a) first used a new signal, the maximum of the stationary probability density function (SPDF), to derive the analytical expression of the MFET escaping from high vegetation state to low vegetation state. In the present paper, we will generalize these results above to obtain the probability of vegetation extinction of system (1.2) at any given time, which is a new mathematical attempt in the study of transient dynamics of vegetation.
In comparison with the existing results, our main innovations and contributions are as follows. To better study the impact of stochastic noise on vegetation dynamics, we first use the Routh–Hurwitz criterion (Ma et al. 2015) to obtain the local stability of the equilibria \(D_0\) and \(D^*\) of system (1.1). Using Assumption (B) in Khasminskii (2011) and the strong law of large numbers (Lipster 1980), we construct some appropriate stochastic Lyapunov functions to obtain a critical value \({\mathscr {R}}_0^H\) and prove that system (1.2) has a unique ergodic stationary distribution if \({\mathscr {R}}_0^H>1\). Using novel techniques (i.e., combining Lemma 2.6 in Zhou et al. (2021) and the transformation theory of matrix algebra), we further derive an approximate expression of a local density function of the stationary distribution and combine a number of numerical examples to illustrate that the approximate local density function has a good global fitting effect for the realistic probability density function under some small stochastic noises. Another critical value \({\mathscr {R}}_0^E\) is defined, and it is theoretically proved that the vegetation will be exponentially extinct for any positive initial conditions when \({\mathscr {R}}_0^E<1\). Furthermore, the exact expression of the probability of vegetation extinction of system (1.2) at any given time is derived based on the stochastic comparison theorem (Ikeda and Watanade 1977). Under the precise condition that required in practical need, we estimate the maximal extinction time of vegetation.
The rest of our paper is organized as follows. We introduce some necessary mathematical notations and lemmas in Sect. 2. In Sect. 3, the existence and uniqueness of an ergodic stationary distribution \(\varpi (\cdot )\) of the solution of system (1.2) is studied. By defining a quasi-positive equilibrium \({\overline{D}}^*\) related to \(D^*\), Sect. 4 shows that the stationary distribution around the equilibrium \({\overline{D}}^*\) can be approximated by a log-normal distribution. Moreover, the explicit form of its log-normal density function is obtained. In Sect. 5, we establish sufficient criterion \({\mathscr {R}}_0^E<1\) for vegetation extinction, and the probability of extinction at a given time is calculated. Using some actual data from Sahel, Yushu and Wuwei, Sect. 6 shows some numerical simulations to verify our theoretical results, and the impact of stochastic noise on the vegetation stability is investigated. Conclusion and further discussion are shown in Sect. 7. The local stability of deterministic system (1.1) is discussed in “Appendix A.”
2 Preliminary
Throughout this paper, unless otherwise specified, let \({\mathbb {R}}^l\) and \(||\cdot ||\) be the l-dimensional Euclidean space and the Euclidean norm, respectively. We define \({\mathbb {R}}_+^l=\{(x_1,...,x_l)\in {\mathbb {R}}^l|x_j>0,1\le j\le l\}\). If A is vector or matrix, its transpose is denoted by \(A^\mathrm{T}\). If A is a square matrix, let \(A^{-1}\) and \(\phi _A(\cdot )\) be its inverse matrix and characteristic polynomial, respectively. If A is a real symmetric matrix, we define
For any \((a_1,a_2,...,a_l)\in {\mathbb {R}}^l\), let \(a_1\vee a_2\vee ...\vee a_n:=\max _{1\le i\le n}\{a_i\}\) and \(a_1\wedge a_2\wedge ...\wedge a_n:=\min _{1\le i\le n}\{a_i\}\). The one-dimensional standard normal distribution function is denoted by \(\Phi (\cdot )\), namely \(\Phi (x)=\frac{1}{\sqrt{2\pi }}\int _{-\infty }^{x}\hbox {e}^{-\frac{t^2}{2}}dt\), where \(x\in {\mathbb {R}}\). Let \(\Phi ^{-1}(\chi ):=\Phi _{\chi }\) be the \(\chi \)-quantile of \(\Phi (\cdot )\), such as \(\Phi _{0.975}=1.96\) and \(\Phi _{0.01}=-2.326\). \({\mathbb {P}}\{\cdot \}\) denotes the probability measure of the complete probability space \( \{\Omega ,{\mathscr {F}},\{{\mathscr {F}}_t\}_{t\ge 0},{\mathbb {P}}\} \). Moreover, we define \(Q(t)=(P(t),W(t),S(t))^T\) as the solution of system (1.2) with the initial value \((P(0),W(0),S(0))^T=Q(0)\).
By a standard argument (Zhou et al. 2021) and the Routh–Hurwitz criterion (Ma et al. 2015), we obtain the following:
Definition 2.1
(Ma et al. 2015) A is called a three-dimensional Hurwitz matrix if and only if A has all negative real part eigenvalues, that is, \(a_1>0\), \(a_3>0\) and \(a_1a_2-a_3>0\), where \(a_i\ (i=1,2,3)\) are the coefficients of \(\phi _A(\lambda )=\lambda ^3+a_1\lambda ^3+\cdots +a_2\lambda +a_3\). In this case, we write \(A\in {\overline{RH}}(3)\).
Lemma 2.1
(Zhou et al. 2021) For any three-dimensional real matrices \( A=(a_{ij})_{3\times 3}\), \(\varLambda _0=\mathrm{diag}\{\delta _1^2,\delta _2^2,\delta _3^2\}\), where \(\delta _k\ne 0\ (k=1,2,3)\). If \(\Sigma _0\) is a symmetric matrix, for the three-dimensional algebraic equation
If \(A\in {\overline{RH}}(3)\), then \(\Sigma _0\) is unique and \(\Sigma _0\succ {\mathbf {0}}\).
Let Z(t) be a homogeneous Markov process satisfying the following stochastic differential equation (SDE):
where the drift term \(b(Z):\ {\mathbb {R}}^l\rightarrow {\mathbb {R}}^l\) and the diffusion term \(f(Z)=(f_j^{(i)}(Z))_{l\times l}:\ {\mathbb {R}}^l\rightarrow {\mathbb {R}}^{l\times l}\) are both Borel measurable. \(f_j^{(i)}(Z)\) denotes the ith element of the jth column of the diffusion term \(f(\cdot )\). \({\overline{B}}(t)\) denotes a l-dimensional Brownian motion defined on the probability space \( \{\Omega ,{\mathscr {F}},\{{\mathscr {F}}_t\}_{t\ge 0},{\mathbb {P}}\}\). By a standard argument (Khasminskii 2011; Gard 1988), system (2.2) has a diffusion matrix \( F_0(Z)=f(Z)f^T(Z):=(\psi _{ij})_{l\times l} \), where \( \psi _{ij}=\sum _{k=1}^{n}f_k^{(i)}(Z)f_k^{(j)}(Z)\).
Lemma 2.2
(Khasminskii 2011; Zhu and Yin 2007; Gard 1988) If there exists a bounded domain \( {\mathbb {G}}_0\subset {\mathbb {R}}^l \) with a regular boundary \( \varGamma _0\) satisfying the following conditions:
\( ({\mathscr {A}}_1) \). There is a non-negative \( C^2 \)-Lyapunov function V(z) such that \( {\mathscr {L}}V(z) \) is negative for any \(z\in {\mathbb {R}}^l\setminus {\mathbb {G}}_0\),
\( ({\mathscr {A}}_2) \). There is a positive number \( m_0 \) such that \( \sum _{i,j=1}^{l}\psi _{ij}(z)\zeta _i\zeta _j\ge m_0||\zeta ||^2,\ \forall \ z\in {\mathbb {G}}_0;\zeta =(\zeta _1,...,\zeta _l)\in {\mathbb {R}}^l\),
then the Markov process Z(t) of system (2.2) is ergodic and has a unique stationary distribution \(\vartheta (\cdot )\) on \({\mathbb {R}}^l\), or rather Z(t) has a unique ergodic stationary distribution \(\vartheta (\cdot )\) on \({\mathbb {R}}^l\). In addition, by the ergodicity theorem Nguyen et al. (2020) and the strong law of large numbers, one has
where \(r(\cdot )\) be an integrable function with respect to the distribution \(\vartheta (\cdot )\).
In practical terms, \(P,\ W\) and S represent the numbers of different kinds of subpopulations, which means that the solution Q(t) of system (1.2) should be global and non-negative. Hence, we must first give the existence and uniqueness of global solution to systems (1.2). Since the proof is similar to that of Theorem 2.1 in Gao et al. (2021), we omit it here and only state the related result.
Lemma 2.3
For any initial value \(Q(0)\in {\mathbb {R}}_+^3\), system (1.2) has a unique solution Q(t) on \( t\ge 0 \) and the solution will remain in \( {\mathbb {R}}_+^3 \) with probability 1, namely \((P(t),W(t),S(t))\in {\mathbb {R}}_+^3\) for any \(t\ge 0\) almost surely (a.s.).
From now on, unless specifically stated, we always assume that \(Q(0)\in {\mathbb {R}}_+^3\) for system (1.2).
3 Existence of Ergodic Stationary Distribution
In this section, we will investigate the stability of stochastic positive equilibrium state of system (1.2), i.e., the existence of an ergodic stationary distribution of system (1.2). First, we define
Theorem 3.1
If \({\mathscr {R}}_0^H>1\), then the solution Q(t) of system (1.2) has a unique ergodic stationary distribution \(\varpi (\cdot )\) on \({\mathbb {R}}_+^3\).
Proof
By Lemma 2.3, we determine that system (1.2) has a unique global positive solution \(Q(t)\in {\mathbb {R}}_+^3\). Hence, all of the descriptions of the space \({\mathbb {R}}^l\) of Lemma 2.2 should be modified as \({\mathbb {R}}_+^3\) in the following proof. We divide the proof of Theorem 3.1 into three steps. The first step is to construct a suitable \(C^2\)-Lyapunov function V(P, W, S). The second is to use the function V(P, W, S) to verify condition \(({\mathscr {A}}_1)\) in Lemma 2.2, and the third is to prove condition \(({\mathscr {A}}_2)\) in Lemma 2.2.
Step 1. We define a \(C^2\)-Lyapunov function \(\overline{V}(P,W,S):\ {\mathbb {R}}_+^3\rightarrow {\mathbb {R}}\) by
where \(V_1(P,W,S)=-\ln P+b_1(W+S)-b_2\ln W-b_3\ln S\), \(V_2(P,W,S)=\frac{1}{\theta +1}(P+\frac{cW}{q\gamma }+\frac{2cS}{q\gamma })^{\theta +1}\) and \(V_3(W,S)=-\ln W-\ln S\). The positive constants \(b_i\ (i=1,2,3)\) are determined in (3.5), and \(M_0>0\) is a sufficiently large constant satisfying the inequality (3.8). In addition, \(\theta >0\) satisfies the following condition:
Note that the function \({{\overline{V}}}(P,W,S)\) tends to \(\infty \) as (P, W, S) approaches the boundary of \({\mathbb {R}}_+^3\) or as \(||(P,W,S)||\rightarrow \infty \). Thus, there exists a point \((P^0,W^0,S^0)\) in the interior of \({\mathbb {R}}_+^3\), at which \({{\overline{V}}}(P,W,S)\) will be minimized. A non-negative \(C^2\)-Lyapunov function V(P, W, S) can then be constructed as follows:
Applying the Itô’s formula (cf. Mao 1997) to \(-\ln W\), \(-\ln S\) and \(W+S\), we calculate that
Combining (3.2)–(3.4), we have
Let
The solution of the above equations is unique, and it is
Then, we obtain
Let \(f_1(W)=\frac{c\alpha _2g_{\mathrm{co}_2}W}{W+k_1}\) and \(f_2(P)=\frac{\alpha (P+k_2w_0)}{P+k_2}\), it can be noticed that \(f_2(P)\) is monotonically increasing function defined on \([0,\infty )\). Thus, \(f_2(P)\ge f_2(0)=\alpha w_0\). By defining \(\beta _1=(R_\mathrm{esp}\wedge r_w\wedge \frac{\alpha w_0}{2})\) and \(\beta _2=1\wedge (\frac{c}{q})^{\theta +1}\), we combine the Itô’s formula and (3.1) to obtain
where
We choose \(M_0>0\), which satisfies the condition \(M_0\ge \frac{2(\varTheta _0+r_w+\alpha w_0)+\sigma _2^2+\sigma _3^2+4}{(2R_\mathrm{esp}+\sigma _1^2)({\mathscr {R}}_0^H-1)}\). That is,
According to (3.2)–(3.3) and (3.6)–(3.8), we then obtain that
where \(\beta _3:=M_0(b_4+\frac{b_3\alpha }{k_2}+\frac{b_2q\alpha _2\gamma g_{\mathrm{co}_2}}{k_1})+\frac{q\alpha _2\gamma g_{\mathrm{co}_2}}{k_1}+\frac{\alpha }{k_2}>0\).
Step 2. We define the bounded closed set
where \(\epsilon \in (0,1)\) is a sufficiently small constant satisfying the following inequalities:
where \(\varTheta _1=\sup _{P\in {\mathbb {R}}_+^1}\{\beta _3P-\frac{\beta _0\beta _2}{4}P^{\theta +1}\}<\infty \).
Next, we need to divide \({\mathbb {R}}_+^3\setminus {\mathbb {G}}_{\epsilon }\) into the following six subsets:
Clearly, \({\mathbb {R}}_+^3\setminus {\mathbb {G}}_{\epsilon }=\bigcup _{l=1}^{6}{\mathbb {G}}_{l,\epsilon }\). Below we verify that \({\mathscr {L}}V(Q(t))\le -1\) for any \( Q(t)\in {\mathbb {R}}_+^3\setminus {\mathbb {G}}_{\epsilon }\), the relevant proof can be divided into five cases.
Case 1. If \(Q(t)\in \bigcup _{i=1}^{2}{\mathbb {G}}_{i,\epsilon }\), combining (3.9)–(3.10), we have
Case 2. If \(Q(t)\in {\mathbb {G}}_{3,\epsilon }\), by (3.9) and (3.11), we have
Case 3. If \(Q(t)\in {\mathbb {G}}_{4,\epsilon }\), by (3.9) and (3.12), we obtain
Case 4. If \(Q(t)\in {\mathbb {G}}_{5,\epsilon }\), combining (3.9) and (3.13), we obtain
Case 5. If \(Q(t)\in {\mathbb {G}}_{6,\epsilon }\), in view of (3.9) and (3.13), we obtain
In summary, for a sufficiently small \(\epsilon \) satisfying the inequalities (3.10)–(3.13), we determine that
This implies that the condition \(({\mathscr {A}}_1)\) in Lemma 2.2 holds when \({\mathscr {R}}_0^H>1\).
Step 3. For any given \(Q(t)\in {\mathbb {G}}_{\epsilon }\), the diffusion matrix of system (1.2) is as follows:
Obviously, \(F_0(Q(t))\succ {\mathbf {0}}\) for any \(t\ge 0\), which means that the smallest eigenvalue of \(F_0(Q(t))\) is bounded away from zero. Thus, we can determine a positive number \(K_0:=\inf _{Q(t)\in {\mathbb {G}}_{\epsilon }}\{\sigma _1^2P^2\wedge \sigma _2^2W^2\wedge \sigma _3^3S^2\}\) satisfying
Thus, the condition \(({\mathscr {A}}_2)\) in Lemma 2.2 is verified.
According to the above three steps, if \({\mathscr {R}}_0^H>1\), the solution Q(t) is ergodic and has a unique stationary distribution \(\varpi (\cdot )\). This completes the proof of Theorem 3.1. \(\square \)
Remark 3.1
Clearly, \({\mathscr {R}}_0^S\le {\mathscr {R}}_0\), and the sign holds if and only if \(\sigma _1=\sigma _2=\sigma _3=0\). As shown before in Section 1, by Theorems 3.1 and the local stability of the positive equilibrium \(D^*\) (i.e., Theorem A.2), \({\mathscr {R}}_0^S\) can be regarded as the unified critical value for determining the persistence of vegetation of systems (1.1) and (1.2).
4 Probability Density Function
By Theorem 3.1, we obtain that the solution Q(t) has an ergodic stationary distribution \(\varpi (\cdot )\) if \({\mathscr {R}}_0^H>1\). In this section, we will employ the similar method as in Zhou et al. (2021), Han et al. (2020) to study the approximate expression of the probability density function of the stationary distribution \(\varpi (\cdot )\). Before this, we define
Moreover, two main transformations of system (1.2) should be first presented.
4.1 Logarithmic Transformation of System (1.2)
Let \(z_1=\ln P\), \(z_2=\ln W\) and \(z_3=\ln S\). Applying the Itô’s formula to \(z_i\), \(i=1,2,3\), we have
Similar to the vegetation-positive equilibrium \(D^*\) of deterministic system (1.1), we define a quasi-positive equilibrium \({{\overline{D}}}^*=({{\overline{P}}}^*,{{\overline{W}}}^*,\overline{S}^*)^T\), which satisfies the following:
By direct calculation, we obtain that \(\overline{W}^*\!=\!\frac{k_1(R_\mathrm{esp}\!+\!\frac{\sigma _1^2}{2})}{c\alpha _2g_{\mathrm{co}_2}-(R_\mathrm{esp}\!+\!\frac{\sigma _1^2}{2})}\), \({{\overline{S}}}^*\!=\!\frac{2R(\overline{P}^*\!+\!k_2)}{(2\alpha \!+\!\sigma _3^2){{\overline{P}}}^*+k_2(2\alpha w_0+\sigma _3^2)}\), and \({{\overline{P}}}^*\) is the root of the nonlinear equation
Let \(F(p):=\frac{q\gamma (R_\mathrm{esp}+\frac{\sigma _1^2}{2})p}{c}+\frac{\sigma _3^2R(p+k_2)}{(2\alpha +\sigma _3^2)p+k_2(2\alpha w_0+\sigma _3^2)}\), where \(p\ge 0\). If \({\mathscr {R}}_1^C\ge 0\), we have
This implies that F(p) is a monotonically increasing function on \([0,\infty )\). Thus, Eq. (4.3) has at most one positive root. Clearly, \({\mathscr {R}}_0^H\le {\mathscr {R}}_0^C\le {\mathscr {R}}_0\), which means that \({\mathscr {R}}_0^C>1\) if \({\mathscr {R}}_0^H>1\). Moreover, if \({\mathscr {R}}_0^H>1\), we easily obtain that \(c\alpha _2g_{\mathrm{co}_2}>(R_\mathrm{esp}+\frac{\sigma _1^2}{2})\),
and (ii) \(R-\frac{k_1(r_w+\frac{\sigma _2^2}{2})(R_\mathrm{esp}+\frac{\sigma _1^2}{2})}{c\alpha _2g_{\mathrm{co}_2} -(R_\mathrm{esp}+\frac{\sigma _1^2}{2})}-F(\infty )=-\infty \).
In summary, if \({\mathscr {R}}_0^H>1\) and \({\mathscr {R}}_1^C\ge 0\), the solution of Eq. (4.3) is unique and \(\overline{D}^*\in {\mathbb {R}}_+^3\). In this sense, we define \(\overline{D}^*=(\hbox {e}^{z_1^*},\hbox {e}^{z_2^*},\hbox {e}^{z_3^*})^T\), i.e., \(z_1^*=\ln \overline{P}^*\), \(z_2^*=\ln {{\overline{W}}}^*\) and \(z_3^*=\ln {{\overline{S}}}^*\).
If there is no environmental noise, \({{\overline{D}}}^*\) coincides with \(D^*\) in deterministic system (1.1). In addition, the conditions \({\mathscr {R}}_0^H>1\) and \({\mathscr {R}}_1^C\ge 0\) are equivalent to \({\mathscr {R}}_0>1\). Thus, \({{\overline{D}}}^*\) and \({\mathscr {R}}_1^C\ge 0\) are biologically reasonable assumptions involved in the stochasticity.
4.2 Linearized Transformation of System (4.1)
We define \(B(t)=(B_1(t),B_2(t),B_3(t))^\mathrm{T}\) and \(X(t)=(x_1,x_2,x_3)^\mathrm{T}\), where \(x_i=z_i-z_i^*\), \(i=1,2,3\). Then, the linearized equation of system (4.1) around the equilibrium \((z_1^*,z_2^*,z_3^*)^T\) is as follows:
where \(a_{12}=\frac{c\alpha _2g_{\mathrm{co}_2}k_1{{\overline{W}}}^*}{(\overline{W}^*+k_1)^2}>0\), \(a_{21}=\frac{q\alpha _2\gamma g_{\mathrm{co}_2}\overline{P}^*}{{{\overline{W}}}^*+k_1}-\frac{\alpha k_2(1-w_0)\overline{P}^*{{\overline{S}}}^*}{({{\overline{P}}}^*+k_2)^2{{\overline{W}}}^*}\), \(a_{22}=\frac{\alpha ({{\overline{P}}}^*+k_2w_0){{\overline{S}}}^*}{(\overline{P}^*+k_2){{\overline{W}}}^*}-\frac{q\alpha _2\gamma g_{\mathrm{co}_2}\overline{P}^*{{\overline{W}}}^*}{({{\overline{W}}}^*+k_1)^2}\), \(a_{23}=\frac{\alpha ({{\overline{P}}}^*+k_2w_0){{\overline{S}}}^*}{(\overline{P}^*+k_2){{\overline{W}}}^*}>0\), \(a_{31}=\frac{\alpha k_2(1-w_0)\overline{P}^*}{({{\overline{P}}}^*+k_2)^2}>0\) and \( a_{33}=\frac{R}{\overline{S}^*}>0\).
4.3 Local Density Function of Stationary Distribution \(\varpi (\cdot )\)
By the theory of Gardiner (1983), for any time t, the transient density function \(\Psi (X(t),t)\) of the solution X(t) of system (4.4) is determined by the following Fokker–Planck equation Jordan et al. (1998):
where \(A_0^{(i)}\) denotes the ith row vector of \(A_0\), \(i=1,2,3\). By the standard argument of Mao (1997) and Roozen (1989), system (4.4) with the initial value X(0) has a unique explicit solution \(X(t)=\hbox {e}^{A_0t}X(0)+\int _{0}^{t}\hbox {e}^{A_0(t-\varsigma )}\varLambda dB(\varsigma )\). Note that \(\varLambda \) is a constant matrix, thus \(\int _{0}^{t}\hbox {e}^{A_0(t-\varsigma )}\varLambda dB(\varsigma )\) follows a Gaussian distribution, implying that system (4.4) has a unique invariant (or stationary) Gaussian distribution \({\mathbb {F}}(\cdot )\) and the distribution of the solution X(t) will approach \({\mathbb {F}}(\cdot )\) as \(t\rightarrow \infty \). For simplicity, let \(\Psi ^*(X(t))=\chi _0\hbox {e}^{-\frac{1}{2}X^TLX}\) be the density function of \({\mathbb {F}}(\cdot )\), where \(\chi _0\) satisfies the normalization condition and L is a real symmetric matrix. In this sense, the transient density function \(\Psi (X(t),t)\) will converge to the invariant density function \(\Psi ^*(X(t))\), that is, \(\lim _{t\rightarrow \infty }\int _{{\mathbb {R}}^3}|\Psi (X(t),t)-\Psi ^*(X(t))|dX=0\) (Liu et al. 2020; Lin and Jiang 2014). Combining \(\frac{\partial \Psi ^*(X(t))}{\partial t}=0\) and Eq. (4.5), the invariant density function \(\Psi ^*(X(t))\) satisfies the following equation:
Substituting the expression of \(\Psi ^*(X(t))\) into Eq. (4.6), L satisfies the following real algebraic equation:
We consider the following auxiliary algebraic equation:
If we can prove that \(\Sigma \) in (4.7) is unique and positive definite, then \(L=\Sigma ^{-1}\succ {\mathbf {0}}\). By Lemma 2.1, we determine that \(A_0\in {\overline{RH}}(3)\) is the necessary condition for \(\Sigma \succ {\mathbf {0}}\). By direct calculation, we have
where \(\lambda _1=a_{22}+a_{33}\), \(\lambda _2=a_{22}a_{33}+a_{12}a_{21}\) and \(\lambda _3=a_{12}(a_{23}a_{31}+a_{21}a_{33})\). Combined with Definition 2.1, we get that \(A_0\in {\overline{RH}}(3)\) if and only if \(\lambda _1>0\), \(\lambda _3>0\) and \(\lambda _1\lambda _2-\lambda _3>0\). In view of the second equality of Eq. (4.2), one can see that
which implies that \(\lambda _1=a_{22}+a_{33}>0\). We consider the following necessary assumption:
Assumption 4.1
\({\mathscr {R}}_1^C\ge 0\), \(\lambda _3>0\) and \(\lambda _1\lambda _2-\lambda _3>0\).
It is evident that \(A_0\in {\overline{RH}}(3)\) if Assumption 4.1 holds. Moreover, we define an important critical value by \(\Delta =\frac{a_{23}a_{31}+a_{21}(a_{33}-a_{22})}{a_{31}}\).
Theorem 4.1
Under Assumption 4.1, if \({\mathscr {R}}_0^H>1\), then the stationary distribution \(\varpi (\cdot )\) around the equilibrium \({{\overline{D}}}^*\) approximately has a log-normal probability density function \({\mathbb {k}}(P,W,S) \) which take form of
where \(\Sigma \succ {\mathbf {0}}\), and the special form of \(\Sigma \) is given as follows.
(i) If \(\Delta =0\), then
(ii) If \(\Delta \ne 0\), then
with
and \(\delta _1=(a_{31}\sigma _1)^2\), \(\delta _2=(a_{12}a_{31}\sigma _2)^2\), \(\delta _3=(a_{12}a_{23}\sigma _3)^2\).
Proof
Note that \(\varLambda ^2=\hbox {diag}\{\sigma _1^2,\sigma _2^2,\sigma _3^2\}\), where \(\sigma _i^2>0\ (\forall \ i=1,2,3)\). Combined with Lemma 2.1, we obtain that \(\Sigma \) is unique and positive definite under Assumption 4.1, implying that \(L\succ {\mathbf {0}}\). Thus, we compute that \(\chi _0=(2\pi )^{-\frac{3}{2}}|\Sigma |^{-\frac{1}{2}}\). Moreover, the solution X(t) of system (4.4) has a stationary normal distribution \({\mathbb {F}}(\cdot )\). By Theorem 3.1, the solution \((P(t),W(t),S(t))^T\) of system (1.2) has a unique stationary distribution \(\varpi (\cdot )\) when \({\mathscr {R}}_0^H>1\). In view of the transformation \(X(t)=(\ln \frac{P(t)}{{\overline{P}}^*},\ln \frac{W(t)}{{\overline{W}}^*},\ln \frac{S(t)}{{\overline{S}}^*})^T\) and the relationship between systems (1.2) and (4.4), we determine that the stationary distribution \(\varpi (\cdot )\) around the equilibrium \({\overline{D}}^*\) can be approximated by a log-normal distribution. That is to say, the stationary distribution \(\varpi (\cdot )\) around the equilibrium \({\overline{D}}^*\) approximately has a log-normal density function \({\mathbb {k}}(P,W,S)\) and it is
To prove Theorem 4.1, we only need to obtain the explicit form of \(\Sigma \) in Eq. (4.7). Using the finite independent superposition principle, let \(\Sigma _i\ (i=1,2,3)\) be the solutions of the following algebraic equations, respectively:
where \(\varLambda _1=\hbox {diag}\{1,0,0\}\), \(\varLambda _2=\hbox {diag}\{0,1,0\}\) and \( \varLambda _3=\hbox {diag}\{0,0,1\}\). Obviously, \(\Sigma =\sigma _1^2\Sigma _1+\sigma _2^2\Sigma _2+\sigma _3^2\Sigma _3\). The explicit form of \(\Sigma \) is derived by the following three steps.
Step 1. Consider the algebraic equation
For the following first elimination matrix \(H_1\), by letting \( C_1=H_1A_0H_1^{-1} \), we obtain
where \(\Delta \) is the same as that in Theorem 4.1. We consider the following two cases of \(\Delta \):
Case 1. If \(\Delta =0\), i.e., \(a_{23}a_{31}=a_{21}(a_{22}-a_{33})\), then \(\lambda _3=a_{12}a_{21}a_{22}\). By Assumption 4.1, we determine that \(a_{12}a_{21}>0\). Let \(\widetilde{C}_1=J_1C_1J_1^{-1}\), where the standardized transformation matrix \(J_1\) and \({{\widetilde{C}}}_1\) are obtained by
According to Zhou et al. (2021), \({{\widetilde{C}}}_1\) is a standard \(R_2\) matrix. In view of \((J_1H_1)\varLambda _1^2(J_1H_1)^T=a_{31}^2\varLambda _1\), Eq. (4.9) can then be equivalently transformed into
Using Lemma 5 of Han et al. (2020), we obtain
Thus, \( \Sigma _1=a_{31}^2(J_1H_1)^{-1}\varPi _1[(J_1H_1)^{-1}]^T\succeq {\mathbf {0}}\).
Case 2. If \( \Delta \ne 0 \), we define \( {\widehat{C}}_1=\widehat{J}_1C_1{\widehat{J}}_1^{-1} \), where \({\widehat{C}}_1\) and the new standardized transformation matrix \({\widehat{J}}_1\) are derived by
where \(\lambda _i\ (i=1,2,3)\) are the same as those in Theorem 4.1. By Han et al. (2020), \({\widehat{C}}_1\) is a standard \(R_1\) matrix. A direct calculation shows that \((\widehat{J}_1H_1)\varLambda _1^2(\widehat{J}_1H_1)^T=(a_{31}\Delta )^2\varLambda _1\). Then, Eq. (4.9) can be equivalently transformed into
As shown in Lemma 2.3 of Zhou et al. (2021), we can determine that \(\frac{1}{(a_{31}\Delta )^2}({\widehat{J}}_1H_1)\Sigma _1(\widehat{J}_1H_1)^T:=\varPi _0\succ {\mathbf {0}}\) and
Thus, \( \Sigma _1=(a_{21}\Delta )^2(\widehat{J}_1H_1)^{-1}\varPi _0[({\widehat{J}}_1H_1)^{-1}]^T\succ {\mathbf {0}}\).
Step 2. Consider the following algebraic equation:
Let \(C_2=H_2A_0H_2^{-1}\), where the second elimination matrix \(H_2\) and \(C_2\) are
By a method similar to that shown in Case 2 of Step 1, we construct a standardized transformation matrix \(J_2\) as follows:
Let \({{\widetilde{C}}}_2=J_2C_2J_2^{-1}\), a direct calculation shows that \({{\widetilde{C}}}_2={\widehat{C}}_1\), that is, \({{\widetilde{C}}}_2\) is also a standard \(R_1\) matrix. Combined with \((J_2H_2)\varLambda _2(J_2H_2)^T=(a_{12}a_{31})^2\varLambda _1\), we can then transform Eq. (4.15) into
Combining (4.13)–(4.14), the solution of Eq. (4.17) is unique and it is
Thus, \( \Sigma _2=(a_{12}a_{31})^2(J_2H_2)^{-1}\varPi _0[(J_2H_2)^{-1}]^T\succ {\mathbf {0}}\).
Step 3. Consider the following algebraic equation:
Similarly, we define \( C_3=(J_3H_3)A_0(J_3H_3)^{-1}\), where the third elimination \(H_3\) and standardized transformation matrix \(J_3\) are
By direct calculation, we obtain that \(C_3={\widehat{C}}_1\) and \((J_3H_3)\varLambda _3(J_3H_3)^T=(a_{12}a_{23})^2\varLambda _1\). Thus, Eq. (4.18) can be equivalently rewritten as
By Eqs. (4.13) and (4.17), we easily get that
implying that \( \Sigma _3=(a_{12}a_{23})^2(J_3H_3)^{-1}\varPi _0[(J_3H_3)^{-1}]^T\succ {\mathbf {0}}\).
According to the above three steps, the explicit form of \(\Sigma \) shown in Theorem 4.1 can be obtained by the definitions of \(\delta _i\ (i=1,2,3)\).
In summary, the stationary distribution \(\varpi (\cdot )\) around the equilibrium \({\overline{D}}^*\) approximately has a three-dimensional log-normal density function \({\mathbb {k}}(P,W,S)\) which shown in (4.8). This completes the proof of Theorem 4.1. \(\square \)
Remark 4.1
If \({\mathscr {R}}_0^H>1\), Theorem 3.1 shows that all of the distributions of the subpopulations P(t), W(t) and S(t) will separately converge to the corresponding stationary marginal distributions \(\mu _1(P)\), \(\mu _2(W)\) and \(\mu _3(S)\) of \(\varpi (\cdot )\) as \(t\rightarrow \infty \). By letting \(\Sigma =(\rho _{ij})_{3\times 3}\), we then combine Theorem 4.1 to obtain that the distribution \(\mu _1(P)\) around \({\overline{P}}^*\) approximately has a log-normal density function \(\ell _1(P)\). Moreover, the distribution \(\mu _2(W)\) around \({\overline{W}}^*\) approximately has a log-normal density function \(\ell _2(W)\) and the distribution \(\mu _3(S)\) around \({\overline{S}}^*\) approximately has a log-normal density function \(\ell _3(S)\), where
5 Vegetation Extinction
As is well known, a major concern of ecological protection is how to prevent vegetation extinction in arid ecosystems. In this section, we will first establish sufficient conditions for the exponential extinction of vegetation of system (1.2).
Theorem 5.1
If \({\mathscr {R}}_0^E:=\frac{c\alpha _2g_{\mathrm{co}_2}}{R_\mathrm{esp}+\frac{\sigma _1^2}{2}}<1\), then the vegetation of system (1.2) will die out with probability 1, namely \(\lim _{t\rightarrow \infty }P(t)=0\) a.s. Moreover,
which means that the exponential decay rate of vegetation is at least \((R_\mathrm{esp}+\frac{\sigma _1^2}{2})({\mathscr {R}}_0^E-1)\) in the long term.
Proof
Applying the Itô’s formula to \(\ln P(t)\), we have
Integrating from 0 to t and dividing by t on both sides of (5.2), we obtain
Using the strong law of large numbers for the local martingale (Lipster 1980), we have
Taking the superior limit of \(t\rightarrow \infty \) on both sides of (5.3), (5.1) can then be proved by (5.4), which implies that \(\lim _{t\rightarrow \infty }P(t)=0\) a.s. and the exponential decay rate of vegetation P(t) of system (1.2) is at least \((R_\mathrm{esp}+\frac{\sigma _1^2}{2})({\mathscr {R}}_0^E-1)\) in the long term. Thus, the proof of Theorem 5.1 is completed. \(\square \)
Remark 5.1
Clearly, \({\mathscr {R}}_0^H\le {\mathscr {R}}_0^E\). By Theorems 3.1 and 5.1, we can determine that the impact of stochastic noise on long-time stability of vegetation system is generally negative. Specifically, for some stochastic noises satisfying the condition \(({\mathscr {R}}_0^H\le ){\mathscr {R}}_0^E<1<{\mathscr {R}}_0\), the vegetation P(t) of deterministic system (1.1) may be persistent, but it will go to extinction in the stochastic system (1.2).
Theorem 5.1 presents a criterion \({\mathscr {R}}_0^E<1\) for the extinction of vegetation in system (1.2). However, if the average extinction time is large, then this criterion may be not useful in practice. In this sense, when \({\mathscr {R}}_0^E<1\), we need to estimate the probability of vegetation extinction at a given time. In practical terms, we usually select a critical value \(\epsilon \) as an index of the extinction of vegetation in an arid ecosystem. That is, we think that the vegetation P(t) is extinct if \(P(t)\le \epsilon \) for any \(t\ge t_0(\epsilon )\).
Theorem 5.2
For any \(\epsilon >0\), if \({\mathscr {R}}_0^E<1\), then the vegetation \(P(t)\ (t>0)\) of system (1.2) follows:
where \(\beta =(R_\mathrm{esp}+\frac{\sigma _1^2}{2})(1-{\mathscr {R}}_0^E)>0\). In particular, if \(\epsilon \le P(0)\), then for some sufficiently small \(\delta \in (0,1)\), one has
Proof
We consider the following auxiliary one-dimensional SDE:
with the initial value \(U(0)=\ln P(0)\). Let U(t) be the solution of Eq. (5.5), by direct calculation, Eq. (5.5) has a unique explicit solution
Since \(B_1(t)\) is a standard Brownian motion, we obtain that \(B_1(0)=0\) and \(B_1(t)\sim {\mathbb {N}}(0,t)\) for any \(t>0\), which means that \(\int _{0}^{t}\sigma _1dB_1(\varsigma )=B_1(t)\) and \(\frac{B_1(t)}{\sqrt{t}}\sim {\mathbb {N}}(0,1)\). Thus,
Applying the comparison theorem of one-dimensional SDE (Ikeda and Watanade 1977), we then obtain from Eqs. (5.2) and (5.5) that \(\ln P(t)\le U(t)\) for any \(t>0\) a.s. Combining (5.6), one can see that
In particular, if \(\epsilon \le P(0)\), we define \(\varphi (t)=\frac{\beta t+\ln \epsilon -\ln P(0)}{\sigma _1\sqrt{t}}\ (t>0)\). It is clear to see that \(\varphi (t)\) and \(\Phi (\varphi (t))\) are both monotonically increasing functions on \((0,\infty )\). Note that \(\lim _{t\rightarrow \infty }\Phi (\varphi (t))=\Phi (\infty )=1\). Combined with (5.7), we determine that for any small \(\delta \in (0,1)\), there exists a constant \(t_{\epsilon }^{(1-\delta )}=\frac{(\sigma _1\Phi _{1-\delta }+\sqrt{\sigma _1^2\Phi _{1-\delta }^2+4\beta \ln \frac{P(0)}{\epsilon }})^2}{4\beta ^2}\) such that \(\varphi (t_{\epsilon }^{(1-\delta )})=\Phi _{1-\delta }\) and
Hence, this completes the proof of Theorem 5.2. \(\square \)
Remark 5.2
By (5.8), \(t_{\epsilon }^{(1-\delta )}\) is an increasing function with respect to P(0), which implies that the initial value P(0) has a negative influence on the extinction of vegetation in system (1.2). In practice, the initial state of the vegetation in an arid ecosystem is not usually considered an extinction state. Thus, we need to choose the index \(\epsilon \) satisfying \(\epsilon \le P(0)\). Combining Theorem 5.2 and \(\Phi _{0.999}=3.09\), we can determine that the probability of vegetation extinction is at least \(99.9\%\) when \(t\ge t_{\epsilon }^{(0.999)}=\frac{(3.09\sigma _1+\sqrt{9.5481\sigma _1^2+4\beta \ln \frac{P(0)}{\epsilon }})^2}{4\beta ^2}\). This implies that \(t_\mathrm{e}^{(0.999)}\) can be regarded as the maximal extinction time of vegetation if the probability of error does not exceed \(0.1\%\). In summary, we call \(t_{\epsilon }^{(1-\delta )}\) the maximum vegetation extinction time in the sense of at least probability \(1-\delta \).
6 Numerical Simulations
In this section, we will introduce Milstein’s higher-order method (Higham 2001) to verify our theoretical results. For any finite time interval \([0,T_0]\), the corresponding discretization equation of system (1.2) on \(t\in [0,T_0]\) is obtained as follows:
where \(\xi _j\), \(\eta _j \) and \( \zeta _j\ (j=1,2,...,n)\) are three independent random variables which follow the Gaussian distribution \( {\mathbb {N}}(0,1) \). n is the total number of iterations, \(\Delta t\) is the length of one iteration step. Moreover, \((P^j,W^j,S^j)^T\) is the value of the jth iteration of the discretized equation. Based on some actual experimental data from Wuwei in China (from 2001 to 2019) (Chen et al. 2021), Yushu in China (from 1951 to 2008) (Yang et al. 2016) and Sahel (from 2002 to 2007) (Kefi et al. 2008), the corresponding average physiological parameters in system (1.2) are shown in Table 1.
Throughout the remainder of this section, we choose \( \Delta t=0.001\) days. By a standard argument (Chen et al. 2021; Kefi et al. 2008, 2010), we obtain that \(R_\mathrm{esp}\) and q are both monotonically increasing functions of the air temperature \(T_\mathrm{e}\). In addition, c is a monotonically increasing function with respect to the air \(\hbox {CO}_2\) concentration \((C_\mathrm{a})\). They satisfy:
where \(R_\mathrm{b}\) is the respiration per unit of vegetation biomass (\(\hbox {day}^{-1}\)), \(Q_{10}\) is a Michaelis function and \(m_0\) is the coefficient of conversion of photosynthesis (mol) into vegetation biomass (g). Rh is the air relative humidity. According to Chen et al. (2021), Kefi et al. (2008), the values of these parameters are given by \(R_b=0.1\), \(Q_{10}=1.6\), \(Rh=40\%\) and \(m_0=4.8\). Using (6.1), the corresponding climatic parameters in Wuwei, Yushu and Sahel are obtained and shown in Table 2. To better study the mechanism of desertification formation, some future climatic scenarios in arid ecosystems should be introduced. Thus, Table 2 also presents two future climatic scenarios RCP4.5 and RCP8.5 of Wuwei.
By means of different combinations of stochastic noise and climatic parameters, we will numerically focus on the following four aspects:
(i) The equilibria and related stability of deterministic system (1.1).
(ii) The impact of stochastic noise and rainfall rate on vegetation dynamics of system (1.2).
(iii) The existence of the ergodic stationary distribution \(\varpi (\cdot )\) of system (1.2) under \({\mathscr {R}}_0^H>1\), and the explicit expression and the local fitting effect of the approximate probability density function of the stationary distribution \(\varpi (\cdot )\).
(iv) Vegetation extinction and the expected extinction time of system (1.2) under \({\mathscr {R}}_0^E<1\).
Remark 6.1
As is well known, the unique stationary distribution \(\varpi (\cdot )\) under \({\mathscr {R}}_0^H>1\) denotes a long-time, stochastic, positive steady state of the vegetation of system (1.2) and is a distribution function defined in infinite time. The existence of the distribution \(\varpi (\cdot )\) cannot be directly verified due to the finite number of iterations of the computer simulation. According to Zhou et al. (2021), for any finite time interval \([0,T_0]\), if \({\mathscr {R}}_0^H>1\), system (1.2) will have a transient distribution function \({\widetilde{\varpi }}(\cdot ,T_0)\) that relies on the variable \(T_0\), and the function \({\widetilde{\varpi }}(\cdot ,T_0)\) can reflect most of the dynamic behavior of \(\varpi (\cdot )\). In addition, for some sufficiently large \(T_0\), \({{\widetilde{\varpi }}}(\cdot ,T_0)\) will fluctuate around \(\varpi (\cdot )\) and satisfies \(\lim _{T_0\rightarrow \infty }{{\widetilde{\varpi }}}(\cdot ,T_0)=\varpi (\cdot )\)Zhou et al. (2021). Hence, we will use the transient distribution function \({\widetilde{\varpi }}(\cdot ,T_0)\) with a large enough time interval and a sufficient number of iterations to indirectly examine the existence of the distribution \(\varpi (\cdot )\) of system (1.2) under \({\mathscr {R}}_0^H>1\).
6.1 Equilibria and Related Stability of Deterministic System (1.1)
In this section, we select the initial value of deterministic system (1.1) and the total time of iterations as \((P(0),W(0),S(0))^T=(500,40,5)^T\) and \(T_0=400\) days, respectively. Next, we will use system (1.1) to describe the vegetation dynamics of Wuwei, Yushu and Sahel.
Example 6.1
According to the relevant climatic parameters of Sahel in Table 2, we compute that \({\mathscr {R}}_0=0.8033\). By Theorem A.1, system (1.1) has an LAS vegetation-free equilibrium \(D_0\), which implies that the vegetation P in Sahel will go to extinction (i.e., \(P(t)\rightarrow 0\) as \(t\rightarrow \infty \)) without human intervention. Figure 2a–c can illustrate it. Using the climatic parameters of Wuwei in Table 2, a direct calculation shows that \({\mathscr {R}}_0=3.5883\) and \({\mathscr {R}}_1=7.5494\times 10^{16}\). According to Theorem A.2, system (1.1) has an LAS vegetation-positive equilibrium \(D^*\). This means that the vegetation in Yushu will be persistent, which is supported in Fig. 2d–f. For the climatic parameters of Wuwei, we have \({\mathscr {R}}_0=2.5196\) and \({\mathscr {R}}_1=1.0023\times 10^{16}\). Figure 2g–i shows that the vegetation in Wuwei will have a stable positive equilibrium state, which is consistent with Theorem A.2.

a–c The solution of system (1.1) with the climatic parameters of Sahel; d–f the solution of system (1.1) with the climatic parameters of Yushu; g–i: the solution of system (1.1) with the climatic parameters of Wuwei. All the observation interval are [0, 400] (day), and the number of observations in the interval [0, 400] is 400, 000
6.2 Impact of Rainfall Rate R
It is well known that semi-arid area refers to climate type area with average annual precipitation between 200 and 500 mm (i.e., \(0.5479\le R\le 1.3699\)). Similar to Sect 6.1, we will use stochastic system (1.2) to describe the vegetation dynamics of Sahel. Moreover, let \((P(0),W(0),S(0))^T=(500,40,5)^T\) be the initial value of system (1.2).
Example 6.2
We fix \(T_0=1600\) days and consider three cases of the noise intensity:
Using the variable-controlling approach, we will fix the values of the \(\hbox {CO}_2\) concentration and air temperature in Sahel. That is, \(R_\mathrm{esp}\equiv 0.23303\), \(c\equiv 1440\) and \(q\equiv 0.0179\). Figure 3 presents the variation trends of \({\mathscr {R}}_0^H\) with different \(R\in [0.4,3]\). According to Theorem 3.1, we can determine that the rainfall rate is helpful for the persistence of vegetation in Sahel for all cases (i)–(iii). In particular, under case (i), we can take some effective measures such as artificial rainfall, to make \(R\ge 1.656\ (mm\) \(\hbox {day}^{-1})\) to maintain vegetation persistence in Sahel. Moreover, we consider the following four cases of R under case (i):
Figure 4 shows the corresponding variation trends of the vegetation P(t) and soil water W(t) of system (1.2) under case (i). Clearly, we obtain from Fig. 4a that the vegetation of system (1.2) will shift from a dense state to a sparse state or even desertification as the value of R decreases.
Based on the expression of \({\mathscr {R}}_0^H\), Figs. 3 and 4, we conclude that the rainfall rate has a positive influence on prompting the persistence of vegetation. Furthermore, the critical value R satisfying \({\mathscr {R}}_0^H>1\) will increase as the noise intensity increases. This implies that the impact of the holistic noise intensity \((\sigma _1,\sigma _2,\sigma _3)\) on vegetation persistence is negative.

The variation trends of \({\mathscr {R}}_0^H\) with different rainfall rates \(R\in [0.4,3]\) and different cases of noise intensity, where case (i): \((\sigma _1,\sigma _2,\sigma _3)=(0.01,0.01,0.01)\), case (ii): \((\sigma _1,\sigma _2,\sigma _3)=(0.04,0.04,0.04)\) and case (iii): \((\sigma _1,\sigma _2,\sigma _3)=(0.1,0.1,0.1)\). Other fixed parameters: \((R_\mathrm{esp},c,q)=(0.23303,1440,0.0179)\)

The diagram tracks variation trends of vegetation P(t) and soil water W(t) of system (1.2) with different rainfall rates \(R=2.6\), 2.2, 1.8 and 1.4. Other parameters are the same as in Fig. 3. The observation interval is [0, 1600] (day), and the number of observations in the interval [0, 1600] is 1, 600, 000
6.3 Impact of Noise Intensities \(\sigma _i\ (i=1,2,3)\)
According to Sect. 6.2, we will separately study the impacts of \(\sigma _1\), \(\sigma _2\) and \(\sigma _3\) on vegetation dynamics. Note that the values of \({\mathscr {R}}_0^H\) and \({\mathscr {R}}_0^E\) are both affected by the noise intensity \(\sigma _1\); thus, the impact of \(\sigma _1\) should be emphatically analyzed.
6.3.1 Impact of \(\sigma _1\)
In this subsection, we will study the dynamical behavior of system (1.2) based on the climatic data from Wuwei. For simplicity, we assume that \(\sigma _2=\sigma _3\). Figure 5 shows the color phase diagrams for the variation trends of \({\mathscr {R}}_0^H\) and \({\mathscr {R}}_0^E\) with different stochastic noises \((\sigma _1,\sigma _2)\subseteq [0,1]\times [0,1]\). Combined with Theorems 3.1 and 5.1, for any initial value \((P(0),W(0),S(0))^T\in {\mathbb {R}}_+^3\), the vegetation will be coexistent with the water environment in the long term if \((\sigma _1,\sigma _2)\subseteq [0,0.2]\times [0,0.2]\), but it will go to extinction when \(\sigma _1\ge 0.92\).

The color phase diagrams for the variation trends of \({\mathscr {R}}_0^H\) and \({\mathscr {R}}_0^E\) with different noise intensities \((\sigma _1,\sigma _2)\subseteq [0,1]\times [0,1]\) (Color figure online)
Example 6.3
We select the initial value \((P(0),W(0),S(0))^T=(1250,2,3)^T\) and \(\sigma _2=0.001\). As shown in Fig. 5, we consider the following five cases of \(\sigma _1\):
For case (i), a direct calculation shows that \({\mathscr {R}}_0^H=2.5182\). On the one hand, according to Theorem 3.1, the solution Q(t) of system (1.2) has a unique stationary distribution \(\varpi (\cdot )\). Based on Remark 6.1, we select the observation interval as [0, 50, 000] (day), i.e., \(T_0=50{,}000\) days. The corresponding marginal frequency histograms of P, W and S with respect to the transient distribution \({\widetilde{\varpi }}(\cdot ,50{,}000)\) are shown in the right-hand column of Fig. 6. This indirectly verifies the existence of the distribution \(\varpi (\cdot )\). Furthermore, the left-hand column of Fig. 6 presents the corresponding solutions of systems (1.1) and (1.2) within 5000 days. On the other hand, we compute that \({\mathscr {R}}_1^C=5.2596\times 10^{-6}\), \({\overline{D}}^*=(100036023.45,1.1158,4.2500)^T\), \(\lambda _3=0.0084\) and \(\lambda _1\lambda _2-\lambda _3=0.1409\). By Theorem 4.1, the distribution \(\varpi (\cdot )\) around \({\overline{D}}^*\) approximately has a three-dimensional log-normal density function \({\mathbb {k}}(P,W,S)\). Combined with \(\Delta =-3.2260\times 10^7\), we obtain that
Then, it follows from Remark r4.1 that \({\mathbb {k}}(P,W,S)\) has the following three marginal density functions:
To verify the correctness of Theorem 4.1 and study the local fitting effect of \({\mathbb {k}}(P,W,S)\), based on the command “ksdensity(\(\cdot ,\cdot \))” in MATLAB (MathWorks, R2019b), we plot the frequency histogram fitting curves of P, W and S at the iteration time equals to \(10{,}000,\ 20{,}000\) and 40, 000 days, each in a different color. Clearly, the above functions \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) all almost coincide with the corresponding three fitting curves, see Fig. 7. To conceptualize this more intuitively, we assume the three fitting curves of (P, W, S) as \((\hslash _1(P,j),\hslash _2(W,j),\hslash _3(S,j))\ (j=10{,}000,20{,}000,40{,}000)\). In the observation interval of the value of (P, W, S) in Fig. 7, by selecting 5000 equidistant observation points, we further define \(e_\mathrm{a}^{(m)}(P,i)\), \({\overline{e}}_\mathrm{a}(P,i)\) and \({\overline{e}}_\mathrm{r}(P,i)\) as the maximum and average absolute errors, and the average relative error between the functions \(\ell _1(P)\) and \(\hslash _1(P,i)\), respectively, \(i=10{,}000\), 20, 000, 40, 000. The relevant notations for the variables W and S can be similarly defined. Table 3 shows the corresponding error values of (P, W, S) at different iteration times. Evidently, all the average relative errors inspected are less than 5%. This together with Fig. 7 means that the fitting effect of \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) for the corresponding theoretical marginal densities of the distribution \(\varpi (\cdot )\) is not only local but also global. That is to say, the global density function of the distribution \(\varpi (\cdot )\) can be greatly approximated by \({\mathbb {k}}(P,W,S)\). Thus, Theorem 4.1 and \({\mathbb {k}}(P,W,S)\) are well verified. Additionally, we plot the functions \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) in the right-hand column of Fig. 6. They also have a good approximation for the marginal frequency histograms of the transient distribution \({\widetilde{\varpi }}(\cdot ,50{,}000)\).

The left-hand column shows the solutions of deterministic system (1.1) and of stochastic system (1.2) on \(t\in [0,5000]\) (day). The right-hand column presents the frequency histograms with 50, 000, 000 iteration points (i.e., \(T_0=50{,}000\) days), and the marginal densities \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) of the approximate density function \({\mathbb {k}}(P,W,S)\). Fixed parameters: \((P(0),W(0),S(0))^T=(1250,2,3)^T\), \(\sigma _1=0.01\), \(\sigma _2=\sigma _3=0.001\)

The blue, green and black lines separately represent the frequency histogram fitting curves of the subpopulations P, W and S with the iteration time equals to 10, 000, 20, 000 and 40, 000 days of the total time \(T_0\). The red lines denote the corresponding marginal densities \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) of the approximate density function \({\mathbb {k}}(P,W,S)\). All of the parameter values are the same as in Fig. 6 (Color figure online)
For case (ii), we obtain that \({\mathscr {R}}_0^H=2.3884\), \({\overline{D}}^*=(92606371.95,1.1909,4.2501)^T\), \({\mathscr {R}}_1^C=5.5721\times 10^{-6}\), \(\lambda _3=0.008\) and \(\lambda _1\lambda _2-\lambda _3=0.1247\). Thus, by Theorems 3.1 and 4.1, the solution Q(t) of system (1.2) still has a unique stationary distribution \(\varpi (\cdot )\), and \(\varpi (\cdot )\) around the equilibrium \({\overline{D}}^*\) approximately has a log-normal density function \({\mathbb {k}}(P,W,S)\). In this example, we still select \(T_0=50{,}000\) days. Then by calculation, we have \(\Delta =-2.4673\times 10^7\ne 0\), and the marginal densities of the function \({\mathbb {k}}(P,W,S)\) are obtained by \(\ell _1(P)=\frac{1.366}{P}\hbox {e}^{-5.8617(\ln \frac{P}{92606371.95})^2}\), \(\ell _2(W)=\frac{1.7184}{W}\hbox {e}^{-9.2764(\ln \frac{W}{1.1909})^2}\) and \(\ell _3(S)=\frac{252.313}{S}\hbox {e}^{-200000(\ln \frac{S}{4.2501})^2}\).
Analogous to case (i), we first plot the frequency histograms of P, W and S with respect to the transient distribution \({\widetilde{\varpi }}(\cdot ,50{,}000)\), see the right-hand column of Fig. 8. Evidently, the existence of the distribution \(\varpi (\cdot )\) are indirectly verified. Compared with the above functions \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\), Fig. 9 presents the frequency histogram fitting curves of the subpopulations P, W and S at the iteration time equals to \(10{,}000,\ 20{,}000\) and 40, 000 days of the total time \(T_0\), each in a different color. Moreover, we still select 5000 equidistant observation points in the observation interval of the value of (P, W, S) in Fig. 9, and the corresponding errors \(e_\mathrm{a}^{(m)}(\cdot ,\cdot )\), \({\overline{e}}_\mathrm{a}(\cdot ,\cdot )\) and \({\overline{e}}_\mathrm{r}(\cdot ,\cdot )\) of (P, W, S) at different iteration times are presented in Table 4. It can be easily noticed from Fig. 9 and Table 4 that the functions \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) all almost coincide with the corresponding three fitting curves. Thus, the local approximate density function \({\mathbb {k}}(P,W,S)\) has a good global fitting effect for the theoretical density function of the distribution \(\varpi (\cdot )\). These verify \({\mathbb {k}}(P,W,S)\) and Theorem 4.1 again.

The left-hand column shows the solutions of deterministic system (1.1) and of stochastic system (1.2) on \(t\in [0,5000]\) (day). The right-hand column presents the frequency histograms with the iteration time \(T_0=50{,}000\) days, and the marginal densities \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) of the approximate density function \({\mathbb {k}}(P,W,S)\). A fixed parameter: \(\sigma _1=0.1\). The other fixed parameter values and the observation interval are the same as Fig. 6

The blue, green and black lines separately denote the frequency histogram fitting curves of the subpopulations P, W and S with the iteration time equals to 10, 000, 20, 000 and 40, 000 days of the total time \(T_0\). The red lines represent the marginal densities \(\ell _1(P)\), \(\ell _2(W)\) and \(\ell _3(S)\) of the approximate density function \({\mathbb {k}}(P,W,S)\). All of the parameter values are the same as in Fig. 8
For cases (iii)–(v), Fig. 10 presents the corresponding variation trends of the vegetation P(t) of system (1.2). It is clear that the vegetation of system (1.2) will go to extinction for all cases (iii)–(v). Moreover, as the noise intensity \(\sigma _1\) increases, the extinction time decreases. In particular, we compute \({\mathscr {R}}_0^H=0.3881\) and \({\mathscr {R}}_0^E=0.8446\) under case (v). Combined with the green line in Fig. 10, Theorem 5.1 is well verified.

Computer simulations for variation trends of vegetation P(t) of system (1.2) with different noise intensities \(\sigma _1=0.6\), 0.8 and 1. The observation interval is [0, 200] (day), and the number of observations in the interval [0, 200] is 200, 000. The other fixed parameter values and the observation interval are the same as Fig. 6
In summary, we obtain that the impact of noise intensity \(\sigma _1\) on vegetation stability of system (1.2) is generally negative. Specifically, based on cases (i)–(ii), Figs. 7 and 9, it has numerically shown that for some small \(\sigma _1\), the vegetation P(t) will be persistent and the solution Q(t) of system (1.2) has a unique stationary distribution. As the value of \(\sigma _1\) increases, the marginal distribution of the vegetation P(t) will become more scattered (see the right-hand columns of Figs. 6, 8), and even the vegetation will die out exponentially for some large \(\sigma _1\) (see Fig. 10). Below we will further study the impacts of the initial value P(0) and noise intensity \(\sigma _1\) on the extinction time of vegetation when \({\mathscr {R}}_0^E<1\).
Example 6.4
We fix \((W(0),S(0),\sigma _2,\sigma _3)=(40,5,0.01,0.01)\) and consider the following eight cases of the parameters \((P(0),\sigma _1)\), which include: (i) (10, 000, 1), (ii) (5000, 1), (iii) (2000, 1), (iv) (1000, 1), (v) (10, 000, 1.1), (vi) (5000, 1.1), (vii) (2000, 1.1) and (viii) (1000, 1.1).
According to Theorem 5.2, we choose the index of vegetation extinction as \(\epsilon =10\ (g/m^2)\). Combined with the expression of the maximum extinction time \(t_{\epsilon }^{(1-\delta )}\) of vegetation in (5.8), Table 5 presents the corresponding values of \({\mathscr {R}}_0^E\), \(t_{\epsilon }^{(0.90)}\) and \(t_{\epsilon }^{(0.99)}\) under different cases (i)–(viii).
For cases (i)–(iv), Fig. 11 presents the corresponding variation trends of vegetation P(t) of system (1.2) with the iteration time \(T_0=800\) days. Similarly, for cases (v)–(viii), the corresponding variation trends of vegetation P(t) with the iteration time \(T_0=300\) days are shown in Fig. 12. Combining Table 5, Figs. 11 and 12, we determine that the impacts of initial value P(0) and noise intensity \(\sigma _1\) have negative and positive effects on the extinction time of vegetation, respectively. That is to say, the vegetation P(t) of system (1.2) will die out faster as P(0) decreases or \(\sigma _1\) increases. Furthermore, it is clear that the vegetation P(t) will go to extinction when \(t\ge t_{\epsilon }^{(0.99)}\) for all cases (i)–(viii). This means that \(t_{\epsilon }^{(0.99)}\) can be used as a vegetation extinction time index applied in practice for some large \(\sigma _1\). In this sense, Theorem 5.2 is well verified.

The solid blue, red, green and purple lines separately represent the variation trends of vegetation P(t) of system (1.2) with the initial values \(P(0)=10{,}000\), 5000, 2000 and \(1000\ (\hbox {g}/\hbox {m}^2)\). The dotted blue line is the measure of vegetation extinction. The dotted black and pink lines denotes the maximum extinction time of vegetation in the sense of at least probabilities \(90\%\) and \(99\%\), respectively. Fixed parameters: \((W(0),S(0),\sigma _1,\sigma _2,\sigma _3)=(40,5,1,0.01,0.01)\). All the observation interval is [0, 800] (day), and the number of observations in the interval [0, 800] is 800, 000 (Color figure online)

The solid blue, red, green and purple lines separately represent the variation trends of vegetation P(t) of system (1.2) with the initial values \(P(0)=10{,}000\), 5000, 2000 and \(1000\ (\hbox {g}/\hbox {m}^2)\). The dotted blue line is the measure of vegetation extinction. The dotted black and pink lines denote the maximum extinction time of vegetation in the sense of at least probabilities \(90\%\) and \(99\%\), respectively. A fixed parameter: \(\sigma _1=1.1\). The other fixed parameter values are the same as Fig. 11. All the observation interval is [0, 300] (day), and the number of observations in the interval [0, 300] is 300, 000 (Color figure online)
6.3.2 Impact of \(\sigma _2\) and \(\sigma _3\)
In this subsection, we will analyze the vegetation dynamics of system (1.2) based on the climatic data from Yushu.
Example 6.5
Using the variable-controlling approach, we fix \(Q(0)=(200,20,5)^T\) and \(T_0=400\) days and consider the following seven cases of \((\sigma _2,\sigma _3)\):
Moreover, we select two special values of \(\sigma _1\), which includes: (I) \(\sigma _1=0.05\) and (II) \(\sigma _1=0.1\). Figure 13 shows the corresponding variation trends of vegetation P(t) of system (1.2) under different cases (i)–(vii). Note that \({\mathscr {R}}_0^H\) will decrease as the noise intensity \(\sigma _i\) increases, \(i=1,2,3\). Combined with \({\mathscr {R}}_0^H=1.0178\) when \((\sigma _1,\sigma _2,\sigma _3)=(0.1,0.35,0.35)\), we obtain that the vegetation P(t) of system (1.2) will be persistent for all cases (i)–(vii), which is supported in Fig. 13. On the one hand, it follows from Fig. 13a, c that the vegetation biomass will decrease slightly as the noise intensity \(\sigma _2\) increases. This implies that \(\sigma _2\) has a minor negative effect on vegetation growth. On the other hand, it can be noticed from Fig. 13b, d that the larger noise intensity \(\sigma _3\) is, the larger fluctuation (i.e., the larger variance) of the vegetation P(t) of system (1.2) is. Thus, the increase of noise intensity \(\sigma _3\) decreases the stability of stochastic positive equilibrium state of the vegetation of system (1.2).

The diagram (a): Computer simulations for variation trends of vegetation P(t) of system (1.2) with different \(\sigma _2=0.001\) 0.05, 0.2 and 0.35 under \((\sigma _1,\sigma _3)=(0.05,0.001)\); The diagram (b): Computer simulations for variation trends of vegetation P(t) of system (1.2) with different \(\sigma _3=0.001\) 0.05, 0.2 and 0.35 under \((\sigma _1,\sigma _2)=(0.05,0.001)\); The diagram (c): Computer simulations for variation trends of vegetation P(t) of system (1.2) with different \(\sigma _2=0.001\) 0.05, 0.2 and 0.35 under \((\sigma _1,\sigma _3)=(0.1,0.001)\); The diagram (d): Computer simulations for variation trends of vegetation P(t) of system (1.2) with different \(\sigma _3=0.001\) 0.05, 0.2 and 0.35 under \((\sigma _1,\sigma _2)=(0.1,0.001)\). Fixed parameters: \(Q(0)=(200,20,5)^T\). All the observation interval are [0, 400] (day)
6.4 Dynamical Analysis of Vegetation Under Future Climatic Scenarios
To better get a view of the trend of vegetation evolution, in this section, the dynamical behavior of vegetation P(t) of system (1.2) is investigated based on two future climatic scenarios RCP4.5 and RCP8.5 of Wuwei.
Example 6.6
We select \((P(0),W(0),S(0))^T=(1250,20,3)^T\), \((\sigma _1,\sigma _2,\sigma _3)=(0.05,0.001,0.001)\) and \(T_0=50{,}000\) days. A direct calculation shows that \({\mathscr {R}}_0^H=3.0013\) and \(\ell _1(P)=\frac{2.8866}{P}\hbox {e}^{-26.178(\ln P-18.5418)^2}\) under the scenario RCP4.5, and \({\mathscr {R}}_0^H=2.4434\) and \(\ell _1(P)=\frac{2.9653}{P}\hbox {e}^{-27.624(\ln P-17.9229)^2}\) under the scenario RCP8.5. According to Remark r4.1 and Theorems 3.1, the vegetation P(t) of system (1.2) will be persistent and has a unique stationary marginal distribution \(\mu _1(P)\) under both the scenarios RCP4.5 and RCP8.5. Then, by Theorem 4.1, the corresponding density function of the distribution \(\mu _1(P)\) around \({\overline{P}}^*\) can be approximated by \(\ell _1(P)\). Figure 14a, b presents the variation trends of vegetation P(t) of system (1.2) on \(t\in [0,4000]\) (day), the frequency histogram of vegetation with the iteration time \(T_0=50{,}000\) days, and the function \(\ell _1(P)\) under the scenario RCP4.5. The corresponding simulations under the scenario RCP8.5 are shown in Fig. 14c, d. Analogous to Example 6.3, Fig. 15 shows the frequency histogram fitting curves of vegetation P at the iteration time equals to \(10{,}000,\ 20{,}000\) and 40, 000 days of the total time \(T_0\), each in a different color. By selecting 5000 equidistant observation points in the observation interval of the vegetation value in Fig. 15, Table 6 provides the corresponding values of some error types between the functions \(\ell _1(P)\) and \(\hslash _1(P,\cdot )\). In this example, it is clear to see that the local approximate marginal density \(\ell _1(P)\) has a good global fitting effect for the density function of the distribution \(\mu _1(P)\). Furthermore, the vegetation state under the scenario RCP4.5 is more dense than that under the scenario RCP8.5, which implies that RCP4.5 may be a suitable climatic condition for vegetation growth than RCP8.5. Combining Figs. 3 and 4, one further obtains that as the global CO\(_{2}\) concentration rise, the climate conditions in Wuwei can be improved by implementing measures to increase annual precipitation, such as artificial rainfall, to improve the luxuriance and stability of vegetation in the future.

Figure 14a shows simulation of vegetation P(t) in deterministic system (1.1) and stochastic system (1.2) on \(t\in [0,4000]\) (day) and under the scenario RCP4.5; Fig. 14b presents the frequency histogram with the iteration time \(T_0=50{,}000\) days, and the approximate density function \(\ell _1(P)\) of vegetation under the scenario RCP4.5; Fig. 14c shows simulation of vegetation P(t) in deterministic system (1.1) and stochastic system (1.2) on \(t\in [0,4000]\) (day) and under the scenario RCP8.5; Fig. 14d presents the frequency histogram with the iteration time \(T_0=50{,}000\) days, and the approximate density function \(\ell _1(P)\) of vegetation under the scenario RCP8.5. Fixed parameters: \((\sigma _1,\sigma _2,\sigma _3)=(0.05,0.001,0.001)\) and \(Q(0)=(1250,2,3)^T\)

The blue, green and black lines separately denote the frequency histogram fitting curves of vegetation P with the iteration time equals to 10, 000, 20, 000 and 40, 000 days of the total time \(T_0\). The red lines represent the corresponding approximate density curve \(\ell _1(P)\) of vegetation P. All of the parameter values are the same as in Fig. 14
7 Discussions
In this paper, we investigate the interactions between the vegetation and two kinds of water environments including surface water and soil water. Taking the stochastic noise into account, a three-dimensional stochastic vegetation–water system (i.e., system (1.2)) is the first to be proposed and investigated, providing a mathematical feasible way for ecology research.
First, for its deterministic system (1.1), the local asymptotic stability of equilibria are obtained. Then for the stochastic system (1.2), we characterize the vegetation stability from both long-term and transient behavior perspectives. For the long-term behavior of vegetation, we obtain sufficient condition \({\mathscr {R}}_0^H>1\) for the existence and uniqueness of an ergodic stationary distribution \(\varpi (\cdot )\). This implies that the vegetation will be persistent when \({\mathscr {R}}_0^H>1\). Moreover, we define a quasi-endemic equilibrium \({\overline{D}}^*\) of system (1.2). A novelty of this paper is that it theoretically derives an approximate expression (4.8) of the probability density function of the distribution \(\varpi (\cdot )\) around the equilibrium \({\overline{D}}^*\), and it has numerically shown that the local approximate density function \({\mathbb {k}}(\cdot )\) in (4.8) has a good global fitting effect for the density function of the distribution \(\varpi (\cdot )\) under some small stochastic noises (see Figs. 7, 9, 15). For the transient behavior of vegetation, we establish sufficient condition \({\mathscr {R}}_0^E<1\) for the exponential extinction of vegetation. Another novelty of this paper is that it derives the exact expression of the probability of vegetation extinction at any given time under \({\mathscr {R}}_0^E<1\). Moreover, the maximum vegetation extinction time \(t_{\epsilon }^{(1-\delta )}\) in the sense of at least probability \(1-\delta \) is obtained, and its rationality is verified based on some actual data from semi-arid ecosystems. Finally, both the theoretical results and numerical simulations show that the stochastic noises have a negative effect on vegetation density and stability, and may even lead to vegetation extinction. Thus, in practical terms, it is necessary to measure the environmental noise intensity to better monitor vegetation state and provide some effective strategies to maintain vegetation stability (via Theorems 3.1, 4.1, 5.1).
Several remaining interesting but challenging issues deserve further consideration. First, a value gap exists between the parameters \({\mathscr {R}}_0^H\) and \({\mathscr {R}}_0^E\). In other words, for some sets of parameters satisfying neither Theorem 3.1 (\({\mathscr {R}}_0^H>1\)) nor Theorem 5.1 (\({\mathscr {R}}_0^E<1\)), the dynamical behavior of vegetation of system (1.2) is unknown. Thus, we need to explore other effective ways to close this value gap in the future. Second, the numerical simulations show a good global fitting effect of the local approximate density function \({\mathbb {k}}(P,W,S)\) for some small stochastic noises. For better practical application, we need to investigate the continuous dependence on small stochastic noises of solution for Fokker–Planck equation, to obtain the global approximation error between \({\mathbb {k}}(P,W,S)\) and the realistic density function of the distribution \(\varpi (\cdot )\) for the same initial distribution. This work is currently underway. Certainly, for some large stochastic noises, the corresponding approximate density function with good fitting effect should also be investigated and constructed. Furthermore, it is interesting to introduce other types of stochastic noise, such as impulsive perturbations (Zhang et al. 2020a; Wang et al. 2014), mean-reverting Ornstein–Uhlenbeck processes (Pan et al. 2022; Zhang and Yuan 2021; Zhao et al. 2015), colored noises (Zhang et al. 2020; Zhou et al. 2021), into system (1.2). The motivation is that the dynamics of vegetation may encounter sudden environmental changes and human interventions (Pan et al. 2020). To this end, based on the actual situation of different arid ecosystems, the corresponding vegetation–water system with suitable type of stochastic noise should be established and analyzed, and that is one of our future research directions.
Data Availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Beddington, J.R., May, R.M.: Harvesting natural populations in a randomly fluctuating environment. Science 197(4302), 463–465 (1977)
Cai, Y., Kang, Y., Wang, W.: A stochastic SIRS epidemic model with nonlinear incidence rate. Appl. Math. Comput. 305, 221–240 (2017)
Chen, Z., Wua, Y., Feng, G., Qian, Z., Sun, G.: Effects of global warming on pattern dynamics of vegetation: Wuwei in China as a case. Appl. Math. Comput. 390, 125666 (2021)
Cox, P.M., Betts, R.A., Jones, C.D., et al.: Acceleration of global warming due to carbon-cycle feedbacks in a coupled climate model. Nature 408, 184–187 (2000)
Dai, A.: Increasing drought under global warming in observations and models. Nat. Clim. Change 3(1), 52–58 (2013)
Gao, M., Jiang, D., Hayat, T., Alsaedi, A.: Stationary distribution and extinction for a food chain chemostat model with random peturbation. Math. Meth. Appl. Sci. 44, 1013–1028 (2021)
Gard, T.C.: Introduction to Stochastic Differential Equations. Marcel Dekker INC, New York (1988)
Gardiner, C.W.: Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences. Springer, Berlin (1983)
Gilad, E., von Hardenberg, J., Provenzale, A., et al.: A mathematical model of plants as ecosystems engineers. J. Theor. Biol. 244, 680–691 (2007)
Guttal, V., Jayaprakash, C.: Impact of noise on bistable ecological systems. Ecol. Model. 201, 420–8 (2007)
Guttal, V., Jayaprakash, C.: Changing skewness: an early warning signal of regime shifts in ecosystems. Ecol. Lett. 11, 450–60 (2008)
Han, Q., Yang, T., Zeng, C., et al.: Impact of time delays on stochastic resonance in an ecological system describing vegetation. Phys. A 408, 96–105 (2014)
Han, B., Jiang, D., Hayat, T., et al.: Stationary distribution and extinction of a stochastic staged progression AIDS model with staged treatment and second-order perturbation. Chaos Soliton Fract. 140, 110238 (2020)
Han, B., Jiang, D., Zhou, B., et al.: Stationary distribution and probability density function of a stochastic SIRSI epidemic model with saturation incidence rate and logistic growth. Chaos Soliton Fract. 142(5), 110519 (2020)
Hautier, Y., Tilman, D., Isbell, F., et al.: Anthropogenic environmental changes affect ecosystem stability via biodiversity. Science 348(6232), 336–340 (2015)
Higham, D.J.: An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 43, 525–546 (2001)
Huang, J., Ji, M., Xie, Y., et al.: Global semi-arid climate change over last 60 years. Clim. Dyn. 46, 1131–1150 (2016)
Ikeda, N., Watanade, S.: A comparison theorem for solutions of stochastic differential equations and its applications. Osaka J. Math. 14, 619–633 (1977)
Imhof, L., Walcher, S.: Exclusion and persistence in deterministic and stochastic chemostat models. J. Differ. Equ. 217, 26–53 (2005)
Jordan, R., Kinderlehrer, D., Otto, F.: The variational formulation of the Fokker–Planck equation. SIAM J. Math. Anal. 29(1), 1–17 (1998)
Kefi, S., Rietkerka, M., Katul, G.G.: Vegetation pattern shift as a result of rising atmospheric \(\text{ CO}_2\) in arid ecosystems. Theor. Popu. Biol. 74, 332–344 (2008)
Kefi, S., Eppinga, M.B., de Ruiter, P.C., Rietkerk, M.: Bistability and regular spatial patterns in arid ecosystems. Theor. Ecol. 3, 257–269 (2010)
Khasminskii, R.: Stochastic Stability of Differential Equations. Springer, Berlin (2011)
Li, X., Liu, X., Ma, Z.: Analysis on the drought characteristics in the main arid regions in the world since recent hundred-odd years. Arid Zone Res. 21, 97–103 (2004)
Lin, Y., Jiang, D.: Threshold behavior in a stochastic SIS epidemic model with standard incidence. J. Dyn. Differ. Equ. 26(4), 1079–1094 (2014)
Lipster, R.: A strong law of large numbers for local martingales. Stochastics 3, 217–228 (1980)
Liu, Q., Jiang, D.: Periodic solution and stationary distribution of stochastic predator-prey models with higher-order perturbation. J. Nonlinear Sci. 28, 423–442 (2018)
Liu, Q., Jiang, D., Hayat, T., et al.: Dynamics of a stochastic predator-prey model with stage structure for predator and Holling Type II functional response. J. Nonlinear Sci. 28, 1151–1187 (2018)
Liu, C., Li, L., Wang, Z., Wang, R.: Pattern transitions in a vegetation system with cross-diffusion. Appl. Math. Comput. 342, 255–262 (2019)
Liu, Q., Jiang, D., Hayat, T., et al.: Stationary distribution and extinction of a stochastic HIV-1 infection model with distributed delay and logistic growth. J. Nonlinear. Sci. 30(1), 369–395 (2020)
Liu, G., Qi, H., Chang, Z., Meng, X.: Asymptotic stability of a stochastic May mutualism system. Comput. Math. Appl. 79(3), 735–745 (2020)
London, N., Unep, N.: United nations convention to combat desertification in countries experiencing serious drought and/or desertification, particularly in Africa. Document A/AC. 241/27, 12. 09. 1994 with Annexes, New York, NY (1994)
Ma, Z., Zhou, Y., Li, C.: Qualitative and Stability Methods for Ordinary Differential Equations. Science Press, Beijing (2015). (in Chinese)
Mao, X.: Stochastic Differential Equations and Applications. Horwood Publishing, Chichester (1997)
Marinov, K., Wang, T., Yang, Y.: On a vegetation pattern formation model governed by a nonlinear parabolic system. Nonlinear Anal. Real World Appl. 14, 507–525 (2013)
May, R.M.: Thresholds and breakpoints in ecosystems with a multiplicity of stable states. Nature 269(5628), 471–477 (1977)
Nguyen, D.H., Yin, G., Zhu, C.: Long-term analysis of a stochastic SIRS model with general incidence rates. SIAM J. Appl. Math. 80, 814–838 (2020)
Pan, S., Zhang, Q., Anke, M.: Near-optimal control of a stochastic vegetation–water system with reaction diffusion. Math. Meth. Appl. Sci. 43(9), 6043–6061 (2020)
Pan, S., Zhang, Q., Anke, M.: Stationary distribution of a stochastic vegetation–water system with reaction–diffusion. Appl. Math. Lett. 123, 107589 (2022)
Roozen, H.: An asymptotic solution to a two-dimensional exit problem arising in population dynamics. SIAM J. Appl. Math. 49, 1793 (1989)
Saco, P.M., Willgoose, G.R., Hancock, G.R.: Eco-geomorphology of banded vegetation patterns in arid and semi-arid regions. Hydrol. Earth Syst. Sci. 11, 1717–1730 (2007)
Shnerb, N.M., Sarah, P., Lavee, H., Solomon, S.: Reactive glass and vegetation patterns. Phys. Rev. Lett. 90(3), 038101 (2003)
Sun, G., Li, L., Zhang, Z.: Spatial dynamics of a vegetation model in an arid flat environment. Nonlinear Dyn. 73(4), 2207–2219 (2013)
Wang, F., Wang, X., Zhang, S., Ding, C.: On pulse vaccine strategy in a periodic stochastic SIR epidemic model. Chaos Soliton Fract. 66, 127–135 (2014)
Yang, D., Liu, Y., Cai, Z., et al.: The spatial and temporal distribution of carbon dioxide over China based on GOSAT observations. Chin. J. Atmos. Sci. 40(3), 541–550 (2016)
Zhang, X., Yuan, R.: A stochastic chemostat model with mean-reverting Ornstein–Uhlenbeck process and Monod–Haldane response function. Appl. Math. Comput. 394, 125833 (2021)
Zhang, H., Zhang, T.: The stationary distribution of a microorganism flocculation model with stochastic perturbation. Appl. Math. Lett. 103, 106217 (2020)
Zhang, H., Xu, W., Lei, Y., Qiao, Y.: Early warning and basin stability in a stochastic vegetation–water dynamical system. Commun. Nonlinear. Sci. Numer. Simul. 77, 258–270 (2019)
Zhang, H., Liu, X., Xu, W.: Threshold dynamics and pulse control of a stochastic ecosystem with switching parameters. J. Frankl. Inst. 358(1), 516–532 (2020)
Zhang, H., Xu, W., Han, P., Qiao, Y.: Stochastic dynamic balance of a bi-stable vegetation model with pulse control. Phys. A 556, 124809 (2020)
Zhang, H., Xu, W., Guo, Q., et al.: First escape probability and mean first exit time for a time-delayed ecosystem driven by non-Gaussian colored noise. Chaos Soliton Fract. 135, 109767 (2020)
Zhao, Y., Yuan, S., Ma, J.: Survival and stationary distribution analysis of a stochastic competitive model of three species in a polluted environment. Bull. Math. Biol. 77(7), 1285–1326 (2015)
Zhou, B., Jiang, D., Dai, Y., et al.: Stationary distribution and probability density function of a stochastic SVIS epidemic model with standard incidence and vacinnation. Chaos Soliton Fract. 143, 110601 (2021)
Zhou, B., Han, B., Jiang, D., et al.: Ergodic stationary distribution and extinction of a hybrid stochastic SEQIHR epidemic model with media coverage, quarantine strategies and pre-existing immunity under discrete Markov switching. Appl. Math. Comput. 410, 126388 (2021)
Zhu, C., Yin, G.: Asymptotic properties of hybrid diffusion systems. SIAM J. Control. Optim. 46, 1155–1179 (2007)
Zu, L., Jiang, D., O’Regan, D., et al.: Ergodic property of a Lotka–Volterra predator-prey model with white noise higher order perturbation under regime switching. Appl. Math. Comput. 330, 93–102 (2018)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (No. 11871473) and Shandong Provincial Natural Science Foundation (No. ZR2019MA010, ZR2019MA006).
Author information
Authors and Affiliations
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by Philipp M Altrock.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. (Local stability of system (1.1))
Appendix A. (Local stability of system (1.1))
In this section, we will focus on the local stability of the equilibria \(D_0\) and \(D^*\) of system (1.1).
Theorem A.1
If \({\mathscr {R}}_0<1\), the vegetation-free equilibrium \(D_0\) of system (1.1) is locally asymptotically stable (LAS), but it is unstable when \({\mathscr {R}}_0>1\).
Proof
The Jacobi matrix of system (1.1) at the equilibrium \(D_0\) is
By direct calculation, the characteristic polynomial of \(D_0\) is
Clearly, \(J(D_0)\) has three real eigenvalues \(y_1=R_\mathrm{esp}({\mathscr {R}}_0-1)\), \(y_2=-r_w<0\) and \(y_3=-\alpha w_0<0\). If \({\mathscr {R}}_0<1\), then \(J(D_0)\in {\overline{RH}}(3)\). Combining Definition 2.1 and the Routh–Hurwitz criterion (Ma et al. 2015), we obtain that \(E_0\) is LAS when \({\mathscr {R}}_0<1\). Conversely, if \({\mathscr {R}}_0>1\), we get that \(y_1=R_\mathrm{esp}({\mathscr {R}}_0-1)>0\), implying that \(D_0\) is unstable. This completes the proof of Theorem A.1. \(\square \)
Next, we define a critical value by
Theorem A.2
If \({\mathscr {R}}_0>1\) and \({\mathscr {R}}_1\ge 0\), the vegetation-positive equilibrium \(D^*\) is LAS.
Proof
Similar to Theorem A.1, the Jacobi matrix of system (1.1) at the equilibrium \(D^*\) is
where \(a_{12}=\frac{c\alpha _2g_{\mathrm{co}_2}k_1P^*}{(W^*+k_1)^2}>0\), \(a_{21}=\frac{\alpha k_2(1-w_0)S^*}{(P^*+k_2)^2}-\frac{q\alpha _2\gamma g_{\mathrm{co}_2}W^*}{W^*+k_1}\), \(a_{22}=\frac{q\alpha _2\gamma g_{\mathrm{co}_2}k_1P^*}{(W^*+k_1)^2}+r_w>0\), \(a_{23}=\frac{\alpha (P^*+k_2w_0)}{P^*+k_2}>0\) and \(a_{31}=\frac{\alpha k_2(1-w_0)S^*}{(P^*+k_2)^2}>0\). A direct calculation shows that
where \(l_1=a_{22}+a_{23}>0\), \(l_2=a_{22}a_{23}-a_{12}a_{21}\) and \(l_3=a_{12}a_{23}(a_{31}-a_{21})\).
If \({\mathscr {R}}_0>1\), we determine that \(P^*=\frac{c(R+r_\mathrm{w}k_1)({\mathscr {R}}_0-1)}{q\gamma (c\alpha _2g_{\mathrm{co}_2}-R_\mathrm{esp})}\) and \(a_{31}-a_{21}=\frac{q\alpha _2\gamma g_{\mathrm{co}_2}W^*}{W^*+k_1}>0\), which means that \(l_3>0\). Moreover, if \({\mathscr {R}}_1\ge 0\), by the equality \(R=\frac{\alpha (P^*+k_2w_0)S^*}{P^*+k_2}\), we have
Combined with \(a_{21}<a_{31}\), we obtain that \(l_2=a_{22}a_{23}-a_{12}a_{21}>a_{22}a_{23}-a_{12}a_{31}\ge 0\) and
According to the Routh–Hurwitz criterion, we determine that \(J(D^*)\in {\overline{RH}}(3)\). Thus, \(D^*\) is LAS when \({\mathscr {R}}_0>1\) and \({\mathscr {R}}_1\ge 0\). This completes the proof of Theorem A.2. \(\square \)
Rights and permissions
About this article

Cite this article
Zhou, B., Han, B., Jiang, D. et al. Stationary Distribution, Extinction and Probability Density Function of a Stochastic Vegetation–Water Model in Arid Ecosystems. J Nonlinear Sci 32, 30 (2022). https://doi.org/10.1007/s00332-022-09789-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00332-022-09789-7
Keywords
- Stochastic vegetation–water model
- Climatic variations
- Stationary distribution
- Ergodicity
- Probability density function
- Extinction