
Abstract
This study introduces the multivariate generalized exponential rational integral function (MGERIF) approach for solving the Hirota bilinear problem in 2 + 1 dimensions. Motivated by the generalized exponential rational function method, MGERIF method proves to be a powerful tool for finding solutions involving exponential, trigonometric, and hyperbolic functions. The solutions we found using MGERIF method have important applications in different scientific domains, including nonlinear optics, plasma physics, fluid dynamics, mathematical physics, and condensed matter physics. To illuminate the physical significance of the derived solutions, we employ three-dimensional (3D) and contour plots, exploring various parameter choices. This visualization approach enhances our understanding of the obtained solutions and facilitates a comprehensive discussion on their potential applications in real-world phenomena. By employing MGERIF method, we contribute to the advancement of methodologies for solving integrable systems, offering a valuable framework for exploring the rich landscape of nonlinear phenomena in various physical contexts.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear partial differential equations (NLPDEs) play a pivotal role in describing a wide array of complex phenomena across various scientific disciplines, physics, biology, and engineering [1,2,3,4,5,6,7,8,9]. Their significance lies in capturing intricate behaviors that linear equations often fail to model adequately. In the field of NLPDEs, the Hirota bilinear equation stands out as a particularly intriguing and challenging problem. This equation, embedded in a (2 + 1)-dimensional framework, has attracted considerable attention due to its relevance in understanding nonlinear wave interactions and soliton dynamics. While several existing methods have been employed to tackle nonlinear PDEs, such as: exp-function method [10], Hirota bilinear method [11,12,13], New extended direct algebraic method [14], the tan-cot method [15], the inverse \(\left( \frac{G'}{G}\right) \)-expansion method [16], solitary wave ansatz method [17], the unified solver method [18], the improved \(tan(\frac{\phi (\xi )}{2})\)-expansion method [19], the generalized Riccati equation mapping method [20], Sine-Gordan equation expansion method [21], the Darboux transformations methods [22], the Weierstrass elliptic function method [23], Lie symmetry method [24], Sardar sub-equation method [25,26,27], and many more [28,29,30,31,32]. In this work, we focus on using the multivariate generalized exponential rational integral function to extract the solutions of the (2 + 1)-D Hirota bilinear problem [33]:
where \(c_i\)’s \((1\le i\le 2)\) are arbitrary constants. The Hirota bilinear equation uses in the study of nonlinear wave interactions and soliton dynamics. Its relevance extends to various scientific disciplines, including physics, plasma physics, and nonlinear optics. Soliton solutions of the Hirota bilinear equation are known for their stability and ability to maintain their shape during propagation, making them crucial in describing certain physical phenomena. In recent years many researchers have worked on this equation, which are as follows: In their study, Hua et al. [34] explored two categories of interaction solutions: lump-kink and lump-soliton. These were achieved by combining two positive quadratic functions with either an exponential function or two positive quadratic functions with a hyperbolic cosine function in the bilinear equation. Lu and Ma [35] have discussed the lump solutions and the rogue waves for the Hirota bilinear equation in the context of positive quadratic function solutions. They have presented the sufficient and necessary conditions for analyticity and rational localization of the lumps. Mandal et al. [36] explored an extended version of the generalized (2 + 1)-dimensional Hirota bilinear equation, unveiling nonlinear wave phenomena in diverse fields such as shallow water, oceanography, and nonlinear optics. Their investigation encompassed a thorough examination of integrability aspects, employing the Bell polynomial form to establish the Hirota bilinear form and Bäcklund transformations. The utilization of the Cole-Hopf transformation facilitated the derivation of Lax pairs through the direct linearization of the coupled system involving binary Bell polynomials. Furthermore, the study unveiled an array of infinite conservation laws derived from the two-field condition inherent in the generalized (2 + 1)-dimensional Hirota bilinear equation. Mandal et al. also presented expressions for one-soliton, two-soliton, and three-soliton solutions emanating from the Hirota bilinear equation.
This article is structured into multiple sections, each devoted to exploring how the multivariate generalized exponential rational integral function is applied to the (2 + 1)-D Hirota bilinear equation, elucidating the consequential results. The first section provides a historical overview of the Hirota bilinear equation, offering insights into its origins and development. The second section focuses on the key steps of the proposed method for investigating nonlinear partial differential equations. In the third section, we apply the MGERIF method to the Hirota bilinear equation, obtaining various families of solutions. The fourth section discusses the physical interpretation of the solutions for different parameter choices. Finally, the fifth section briefly concludes our work.
2 Multivariate generalized exponential rational integral function approach
This section introduces an innovative and highly efficient approach referred to as the multivariate generalized exponential rational integral function method. The MGERIF method stands out for its exceptional capability to yield novel and analytical solutions to nonlinear partial differential equations (NLPDEs). This distinctive approach is elucidated with the foundational support of the generalized exponential rational function (GERF) [37, 38] method. The significance of MGERIF lies in its ability to tackle NLPDEs, providing a powerful tool for addressing complex mathematical problems.
-
In general NLPDEs can be written as
$$\begin{aligned} P(R,R_{x},R_{y},R_{t},R_{xx},R_{xt},...)=0, \end{aligned}$$(2)where \(R=R(x,y,t)\) is a solution of Eq. (2) with the independent variables x,y and t.
-
To reduce the Eq. (2), we consider the transformation
$$\begin{aligned}&R=R(x,y,t)=S(\vartheta ),\nonumber \\&\vartheta =a _1x+a _2y+a _3 t+a _4, \end{aligned}$$(3)where \(a_1, a_2, a_3,\) and \(a_4\) are arbitrary constants. Making use of transformation (3) into (2), then the reduced nonlinear ordinary differential equation (NLODE) can be recast as
$$\begin{aligned} P(S(\vartheta ), S'(\vartheta ), S''(\vartheta ),...)=0, \end{aligned}$$(4)with \(S'=\frac{dS}{d\vartheta },~S''=\frac{d^2S}{d\vartheta ^2},~\cdots \) etc.
-
To simplify the NLODE (4), we propose a solution of the form
$$\begin{aligned} S(\vartheta )&={\mathcal {H}}_0+\sum _{i=1}^{N}{\mathcal {H}}_{i}\left( \underbrace{\int \int \cdots \int }_{i} U(\vartheta ) \, d\vartheta \, d\vartheta \cdots \, d\vartheta \right) ^{i}\nonumber \\&\quad +\sum _{i=1}^{N}{\mathcal {P}}_{i}\left( \underbrace{\int \int \cdots \int }_{i} U(\vartheta ) \, d\vartheta \, d\vartheta \cdots \, d\vartheta \right) ^{-i}. \end{aligned}$$(5)Here, \(U(\vartheta )\), which appears in the solution, is defined as
$$\begin{aligned} U(\vartheta )=\frac{k_1 e^{m_1\vartheta }+k_2 e^{m_2\vartheta }}{k_3 e^{m_3\vartheta }+k_4 e^{m_4\vartheta }}. \end{aligned}$$(6) -
In order to satisfy Eq. (1), it is crucial to determine the appropriate values for arbitrary parameters such as \(k_j, m_j\), \((1 \le j \le 4)\), \({\mathcal {H}}_0\), \({\mathcal {H}}_i\) and \({\mathcal {P}}_i\) \((1 \le i \le N)\) to be determined in such a way Eq. (1) satisfies.
-
Additionally, the value of N, which represent the order of the method, is determined by applying the homogeneous balancing principle to both the highest order derivative term and the nonlinear term within NLODE (4).
-
Placing (5) into (4) with (6), we arrive at an algebraic equation \(Q(\Theta _1,\Theta _2,\Theta _3,\Theta _4)=0.\) Here, \(\Theta _j=e^{m_j\vartheta },\) for \(1\le j \le 4.\) Thereafter, we are making each of the coefficient of function in Q to zero.
-
After applying mathematical simplifications through software like Mathematica, we can determine the specific values of the variables \({\mathcal {H}}_0\), \({\mathcal {H}}_i\) and \({\mathcal {P}}_i\) \((1 \le i \le N)\). Once these values are determined, we can substitute them into Eqs. (5) and (6), allowing us to obtain exact soliton solutions for the Eq. (4).
3 Remark:
The introduce method offers a systematic and effective approach for obtaining exact soliton solutions to NLPDEs of the form given in Eq. (2). By employing a transformation and subsequent reducing the NLPDE to a nonlinear ODE in terms of a new variable, the method allows for the systematic simplification of the problem. The proposed solution structure in Eq. (5), involving a series expansion with integrals of a specific function \(U(\vartheta )\), provides a flexible framework to capture the complex dynamics of the underlying equation.
4 Applications of MGERIF method
In this section, we employ the MGERIF method to derive analytic wave solutions for the Hirota Bilinear equation. To initiate this process, we utilize a wave transformation for the Eq. (1), expressed as:
This translation transforms the Hirota Bilinear equation into the following equation:
By carefully balancing the terms involving \(S^{(4)}\) and \(SS''\) in Eq. (8), we determine that \(N=2\). Consequently, the trial solution is given by
Substituting this trial solution into (8) and applying the MGERIF technique with computational software such as Mathematica, we obtain a set of solutions for the Hirota Bilinear equation.
5 1. The familiar sine representation:
Setting the parameters to \([k_1,k_2,k_3,k_4]=[1,-1,i,i]\) and \({[m_1,m_2,m_3,m_4]=[i,-i,0,0]}\), Eq. (6) transforms into the standard form of the sine function
After incorporating Eq. (10) into Eq. (9), we are able to establish the expression for \(S(\vartheta )\):
Case 1.1:
Substituting the specified constants into Eq. (11), allows us to derive the solution to Eq. (8) as
Hence, using Eq. (12) within the expression (7), allows us to determine the exact invariant solution to the Hirota bilinear equaion
Case 1.2:
Substituting the specified constants into Eq. (11), allows us to derive the solution to Eq. (8) as
Hence, using Eq. (14) within the expression (7), allows us to determine the exact invariant solution to the Hirota bilinear equaion

Visualization of Eq. (15): real, imaginary and absolute components
Case 1.3:
Substituting the specified constants into Eq. (11), allows us to derive the solution to Eq. (8) as
Hence, using Eq. (16) within the expression (7), allows us to determine the exact invariant solution to the Hirota bilinear equaion

Visualization of Eq. (17): real, imaginary and absolute components
Case 1.4:
Substituting the specified constants into Eq. (11), allows us to derive the solution to Eq. (8) as
Hence, using Eq. (18) within the expression (7), allows us to determine the exact invariant solution to the Hirota bilinear equaion
6 2. The familiar cosine representation:
Setting the parameters to \([k_1,k_2,k_3,k_4]=[1,1,1,1]\) and \({[m_1,m_2,m_3,m_4]=[i,-i,0,0]}\), Eq. (6) transforms into the standard form of the cosine function
By plugging in Eq. (20) into Eq. (9), we can determine the specific form for \(S(\vartheta )\):
Case 2.1:
The solution to Eq. (8) can be obtained by inserting these given constants into Eq. (11):
Hence, from Eq. (22) in the context of expression (7), we obtain
Case 2.2:
The solution to Eq. (8) can be obtained by inserting these given constants into Eq. (11):
Hence, from Eq. (24) in the context of expression (7), we obtain

Visualization of Eq. (25): real, imaginary and absolute components
Case 2.3:
The solution to Eq. (8) can be obtained by inserting these given constants into Eq. (11):
Hence, from Eq. (26) in the context of expression (7), we obtain

Visualization of Eq. (27): real, imaginary and absolute components
Case 2.4:
The solution to Eq. (8) can be obtained by inserting these given constants into Eq. (11):
Hence, from Eq. (28) in the context of expression (7), we obtain
7 3. The familiar exponential representation:
Setting the parameters to \([k_1,k_2,k_3,k_4]=[2,2,2,2]\) and \([m_1,m_2,m_3,m_4]=[2/5,2/5,0,0]\), Eq. (6) transforms into the standard form of the exponential function
By replacing Eq. (30) with Eq. (9), the structure of \(S(\vartheta )\) can be deduced as:
Case 3.1:
Utilizing the provided set of constant in Eq. (31), we can deduce a solution for Eq. (8) as
Equations (32) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 3.2:
Utilizing the provided set of constant in Eq. (31), we can deduce a solution for Eq. (8) as
Equations (34) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 3.3:
Utilizing the provided set of constant in Eq. (31), we can deduce a solution for Eq. (8) as
Equations (36) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 3.4:
Utilizing the provided set of constant in Eq. (31), we can deduce a solution for Eq. (8) as
Equations (38) and (7) yield the soliton solution for the Hirota Bilinear equation:
8 4. The familiar cosine hyperbolic representation:
Setting the parameters to \([k_1,k_2,k_3,k_4]=[i,i,i,i]\) and \([m_1,m_2,m_3,m_4]=[1,-1,0,0]\), Eq. (6) transforms into the standard form of the cosine hyperbolic function
Plugging Eq. (40) into Eq. (9), we can derive the expression for \(S(\vartheta )\) as:
Case 4.1:
By inserting the given constants into Eq. (41), we can derive the solution of Eq. (8) as:
Therefore, the soliton solution for the Hirota Bilinear equation can be found through Eqs. (42) and (7):
Case 4.2:
By inserting the given constants into Eq. (41), we can derive the solution of Eq. (8) as:
Therefore, the soliton solution for the Hirota Bilinear equation can be found through Eqs. (44) and (7):
Case 4.3:
By inserting the given constants into Eq. (41), we can derive the solution of Eq. (8) as:
Therefore, the soliton solution for the Hirota Bilinear equation can be found through Eqs. (46) and (7):

Visualization of Eq. (47): real, imaginary and absolute components
Case 4.4:
By inserting the given constants into Eq. (41), we can derive the solution of Eq. (8) as:
Therefore, the soliton solution for the Hirota Bilinear equation can be found through Eqs. (48) and (7):
9 5. The familiar sine hyperbolic representation:
Setting the parameters to \([k_1,k_2,k_3,k_4]=[2i,-2i,4i,4i]\) and \([m_1,m_2,m_3,m_4]=[1/2,-1/2,0,0]\), Eq. (6) transforms into the standard form of the sine hyperbolic function
Upon inserting Eq. (50) into Eq. (9), the expression for \(S(\vartheta )\) becomes:
Case 5.1:
Utilizing the provided set of constant in Eq. (51), we can deduce a solution for Eq. (8) as
Equations (52) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 5.2:
Utilizing the provided set of constant in Eq. (51), we can deduce a solution for Eq. (8) as
Equations (54) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 5.3:
Utilizing the provided set of constant in Eq. (51), we can deduce a solution for Eq. (8) as
Equations (56) and (7) yield the soliton solution for the Hirota Bilinear equation:
Case 5.4:
Utilizing the provided set of constant in Eq. (51), we can deduce a solution for Eq. (8) as
Equations (58) and (7) yield the soliton solution for the Hirota Bilinear equation:
10 Physical discussion
To deepen our comprehension of the obtained solutions, we have provided visual representation through 3D plots and corresponding contour plots. These graphical illustrations offer insights into the behavior of the solutions, showcasing their variations based on carefully chosen parameters.
-
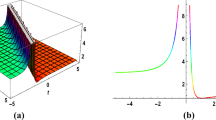
In Fig. 1, we depict the lumps corresponding to the real and imaginary components of the solution (15) for the choice of parameters (a)–(d) \(a_1=2;a_2=i;a_4=1;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=0.2 i;\) at \(t=0.1\) (b)–(e) \(a_1=2;a_2=i;a_4=3;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=2;\) at \(t=0.1\) respectively, while the absolute part represents the multi-solitons for (c)–(f) \(a_1=2;a_2=5 i;a_4=3 i;c_2=3;{\mathcal {H}}_0=0.25;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=2 i;\) at \(t=0.02\).
-
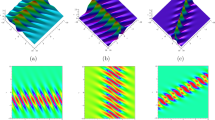
The real and imaginary parts of the solution (17) are visualized as lumps in Fig. (2). The absolute part exhibits the multi-soliton profile with different parameter configurations: (a)–(d) \(a_1=2;a_2=2 i;a_4=1;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=2;{\mathcal {P}}_2=2 i;\) at \(t=0.01\) (b)–(e) \(a_1=2;a_2=2 i;a_4=1;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=2;{\mathcal {P}}_2=1;\) at \(t=0.01\) and (c)–(f) \(a_1=3 i;a_2=2;a_4=i;c_2=0.5;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=2 i;{\mathcal {P}}_2=2;\) at \(t=0.03\).
-
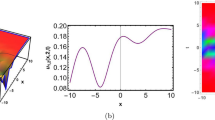
The lumps corresponding to the real and imaginary parts of the solution (25) are shown in Fig. (3). The absolute part presents a soliton profile with different parameter values: (a)–(d) \(a_1=2;a_2=i;a_4=0.3;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3 i;\) at \(t=1\) (b)–(e) \(a_1=2;a_2=i;a_4=0.3;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3;\) at \(t=2\) and (c)–(f) \(a_1=2;a_2=i;a_4=0.3;c_2=2 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3;\) at \(t=2\). Here in this figure, we have study the behavior of the solution for full plot range and with no plot range that represent the different dynamics.
-
In Fig. (4), we observe the lumps representing the real and imaginary parts of the solution (27). The absolute part demonstrates a multi-soliton profile for the following parameter choices: (a)–(d) \(a_1=2.2;a_2=3 i;a_4=1.25;c_2=3 i;{\mathcal {H}}_0=0.02;{\mathcal {H}}_1=0.023;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3 i;{\mathcal {P}}_2=2 i;\) at \(t=0.01\) (b)-(e) \(a_1=2;a_2=3 i;a_4=0.4 i;c_2=5;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=7 i;{\mathcal {P}}_2=2 i;\) at \(t=0.03\) and (c)-(f) \(a_1=2;a_2=3 i;a_4=0.4 i;c_2=5 i;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=7;{\mathcal {P}}_2=2 i;\) at \(t=0.3\).
-
Figure (5) displays the lumps for the real component and interaction of lumps and peakon for the imaginary component of the solution (49). The absolute part shows a multi-soliton profile under the parameter configurations: (a)–(d) \(a_1=2;a_2=2 i;a_4=0.02;c_2=3;{\mathcal {H}}_0=2;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3 i;{\mathcal {P}}_2=2.1 i;\) at \(t=1.5\) (b)–(e) \(a_1=2;a_2=2 i;a_4=0.7;c_2=5;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3 i;{\mathcal {P}}_2=2.1 i;\) at \(t=1.5\) and (c)–(f) \(a_1=2;a_2=2 i;a_4=0.7;c_2=5;{\mathcal {H}}_0=0;{\mathcal {H}}_1=0;{\mathcal {H}}_2=0;{\mathcal {P}}_1=3 i;{\mathcal {P}}_2=2.1 i;\) at \(t=1.5\).
11 Conclusion
In conclusion, we have presented a novel method for solving NLPDEs, specifically focusing on the (2 + 1)-dimension Hirota bilinear equation. We have designated the approach as the multivariate generalized exponential rational integral function. We applied this method to the Hirota bilinear equation, demonstrating its effectiveness in finding solutions. The obtained solutions were visualized through 3D and contour plots, providing a comprehensive understanding of the behavior of the solutions. Overall, our proposed method offers a systematic and powerful approach to tackle NLPDEs, particularly showcasing its applicability to the Hirota bilinear equation. The accuracy and efficiency of our method were verified through computational software Mathematica, validating its potential as a valuable tool in the domain of nonlinear differential equations. Future work could involve extending the proposed method to other classes of nonlinear partial differential equations, exploring its applicability and efficiency in diverse mathematical contexts. Additionally, further research could focus on developing numerical techniques for real-time simulations and exploring potential applications in physical systems or interdisciplinary fields. Validating the method on a broader range of benchmark problems and comparing its performance with existing approaches would contribute to establishing its robustness and versatility.
Data availability statement
The data that supports the results of the research is given in the publication.
References
Wazwaz, A.M.: New (3 + 1)-dimensional Painlevé integrable fifth-order equation with third-order temporal dispersion. Nonlinear Dyn. 106, 891–897 (2021)
Wazwaz, A.M.: Two new integrable fourth-order nonlinear equations: multiple soliton solutions and multiple complex soliton solutions. Nonlinear Dyn. 94, 2655–2663 (2018)
Li, B.Q., Wazwaz, A.M., Lan, Y.: Soliton resonances, soliton molecules to breathers, semi-elastic collisions and soliton bifurcation for a multi-component Maccari system in optical fiber. Opt. Quantum Electron. 56, 573 (2024)
Kumar, S., Dhiman, S.K.: Exploring cone-shaped solitons, breather, and lump-forms solutions using the lie symmetry method and unified approach to a coupled breaking soliton model. Phys. Scripta 99(2), 025243 (2024)
Kumar, S., Mohan, B.: A novel analysis of Cole–Hopf transformations in different dimensions, solitons, and rogue waves for a (2 + 1)-dimensional shallow water wave equation of ion-acoustic waves in plasmas. Phys. Fluids 35(12), 127128 (2024)
Kumar, S., Ma, W.X., Kumar, A.: Lie symmetries, optimal system and group-invariant solutions of the (3+1)-dimensional generalized KP equation. Chin. J. Phys. 69, 1–21 (2021)
Rehaman, S.U., Bilal, M., Ahmad, J.: Highly dispersive optical and other soliton solutions to fiber Bragg gratings with the application of different mechanisms. Modern Phys. Lett. B 36(28), 2250193 (2022)
Bilal, M., Rehaman, S.U., Ahmad, J.: Analysis in fiber Bragg gratings with Kerr law nonlinearity for diverse optical soliton solutions by reliable analytical techniques. Modern Phys. Lett. B 36(23), 2250122 (2022)
Wazwaz, A.M.: The tan h method: solitons and periodic solutions for the Dodd–Bullough–Mikhailov and the Tzitzeica–Dodd–Bullough equations. Chaos Solitons Fractals 25(1), 55–63 (2005)
He, J.H., Wu, X.H.: Exp-function method for nonlinear wave equations. Chaos solitons Fractals 30, 700–708 (2006)
Kumar, S., Mohan, B., Kumar, R.: Lump, soliton, and interaction solutions to a generalized two-mode higher-order nonlinear evolution equation in plasma physics. Non-linear Dyn. 110, 693–704 (2022). https://doi.org/10.1007/s11071-022-07647-5
Wazwaz, A.M.: Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh-coth method. Appl. Math. Comput. 190(1), 633–640 (2007)
Bilal, M., Rehaman, S.U., Ahmad, J.: Lump-periodic, some interaction phenomena and breather wave solutions to the (2+1)-rth dispersionless Dym equation. Modern Phys. Lett. B 36(2), 2150547 (2022)
Rehman, H.U., Ullah, N., Imran, M.A., Akgul, A.: Optical Solitons of Two Non-linear Models in Birefringent Fibres Using Extended Direct Algebraic Method. Int. J. Appl. Comput. Math. 7, 227 (2021). https://doi.org/10.1007/s40819-021-01180-6
Al-Shaeer, M.J.A.R.A.: Solutions for nonlinear partial differential equations by Tan-Cot method. IOSR J. Math. (IOSR-JM) 5(3), 6–11 (2013)
Kumar, S., Niwas, M.: Exploring lump soliton solutions and wave interactions using new Inverse \((G^{\prime }/G)\)-expansion approach: applications to the (2+1)-dimensional nonlinear Heisenberg ferromagnetic spin chain equation. Nonlinear Dyn. (2023). https://doi.org/10.1007/s11071-023-08937-2
Zayed, E.M.E., Nowehy, A.G.A.: The solitary wave ansatz method for finding the exact bright and dark soliton solutions of two nonlinear Schrodinger equations. J. Assoc. Arab Univ. Basic Appl. Sci. 24, 184–190 (2017)
Boulaaras, S.M., Rehman, H.U., Iqbal, I., Sallah, M., Qayyum, A.: Unveiling optical solitons: Solving two forms of nonlinear Schrodinger equations with unified solver method. Optik 295, 171535 (2023)
Ilhan, O.A., Manafian, J., Alizadeh, A., et al.: New exact solutions for nematicons in liquid crystals by the \(tan({\phi }/{2})\)-expansion method arising in fluid mechanics. Eur. Phys. J. Plus. 135, 313 (2020)
Kumar, S., Niwas, M.: New optical soliton solutions and a variety of dynamical wave profiles to the perturbed Chen–Lee–Liu equation in optical fbers. Opt. Quantum Electron. 55(418), 1–25 (2023)
Bilal, M., Ren, J., Inc, M., Alhefthi, R.K.: Optical soliton and other solutions to the nonlinear dynamical system via two efficient analytical mathematical schemes. Opt. Quantum Electron. 55, 938 (2023)
Guo, B., Ling, L., Liu, Q.P.: Nonlinear Schrödinger equation: generalized Darboux transformation and rogue wave solutions. Phys. Rev. E 85(2), 026607 (2012)
Saied, E.A., AbdEl-Rahman, R.G., Ghonamy, M.I.: A generalized Weierstrass elliptic function expansion method for solving some nonlinear partial differential equations. Comput. Math. Appl. 58, 1725–1735 (2009)
Dhiman, S.K., Kumar, S.: Different dynamics of invariant solutions to a generalized (3+1)-dimensional Camassa–Holm–Kadomtsev–Petviashvili equation arising in shallow water-waves. J. Ocean Eng. Sci. (2022). https://doi.org/10.1016/j.joes.2022.06.019
Chou, D., Rehman, H.U., Amer, A., Amer, A.: New solitary wave solutions of generalized fractional Tzitzéica type evolution equations using Sardar sub equation method. Opt. Quantum Electron. 55, 1148 (2023)
Rehman, H.U., Inc, M., Asjad, M.I., Habib, A.: New soliton solutions for the space-time fractional modified third order Korteweg–de Vries equation. J. Ocean Eng. Sci. (2022). https://doi.org/10.1016/j.joes.2022.05.032
Asjad, M.I., Ullah, N., Rehman, H.U., Baleanu, D.: Optical solitons for conformable space-time fractional non linear model. J. Math. Comput. Sci. 27, 28–41 (2022)
Islam, M.T., Sarkar, T.R., Abdullah, F.A., Aguliar, J.F.G.: Distinct optical soliton solutions to the fractional Hirota Maccari system through two separate strategies. Optik 300, 171656 (2024)
Islam, M.T., Sarkar, S., Alsaud, H., Inc, M.: Distinct wave profiles relating to a coupled of Schrödinger equations depicting the modes in optics. J. Opt. Quantum Electron. 56, 492 (2024)
Durur, Y.H., Duran, S., Islam, M.T.: Ample felicitous wave structures for fractional foam drainage equation modeling for fluid-flow mechanism. Comput. Appl. Math. 41(4), 174 (2022)
Islam, M.T., Akter, M.A., Aguilar, J.F.G., Akbar, M.A., Careta, E.P.: Novel optical solitons and other wave structures of solutions to the fractional order nonlinear Schrodinger equations. J. Opt. Quantum Electron. 54, 520 (2022)
Islam, M.T., Sarkar, T.R., Abdullah, F.A., Gómez-Aguilar, J.F.: Characteristics of dynamic waves in incompressible fluid regarding nonlinear Boiti–Leon–Manna–Pempinelli model. Phys. Scripta 98(8), 085230 (2023)
Ismael, H.F., Nabi, H.R., Sulaiman, T.A., Shah, N.A., Eldin, S.M., Bulut, H.: Hybrid and physical interaction phenomena solutions to the Hirota bilinear equation in shallow water waves theory. Results Phys. 53, 106978 (2023)
Hua, Y.F., Guo, B.L., Ma, W.X., Lü, X.: Interaction behavior associated with a generalized (2+1)-dimensional Hirota bilinear equation for nonlinear waves. Appl. Math. Model. 74, 184–198 (2019)
Lü, X., Ma, W.X.: Study of lump dynamics based on a dimensionally reduced Hirota bilinear equation. Nonlinear Dyn. (2016). https://doi.org/10.1007/s11071-016-2755-8
Mandal, U.K., Malik, S., Kumar, S., Das, A.: A generalized (2+1)-dimensional Hirota bilinear equation: integrability, solitons and invariant solutions. Nonlinear Dyn. 111, 4593–4611 (2023)
Ghanbari, B., Inc, M.: A new generalized exponential rational function method to find exact special solutions for the resonance nonlinear Schrödinger equation. Eur. Phys. J. Plus. 133, 142 (2018)
Bilal, M., Rehaman, S.U., Ahmad, J.: Dispersive solitary wave solutions for the dynamical soliton model by three versatile analytical mathematical methods. Eur. Phys. J. Plus. 137, 676 (2022)
Acknowledgements
The authors extend their thanks to the Editor and reviewers for their valuable and helpful recommendations for improving this manuscript. This work has been under an undergraduate Research Project initiative by Shyama Prasad Mukherji College for Women, University of Delhi. The authors would like to grateful the Principal and college administration for providing the necessary facilities, time, and resources for this research project. The author, Sachin Kumar acknowledges the Institution of Eminence of the University of Delhi, India, for financial support for this research through the Faculty Research Program Grant - IoE (Ref. No./IoE/2023-24/12/FRP).
Funding
None.
Author information
Authors and Affiliations
Contributions
All the authors have agreed and given their consent for the publication of this research paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors state that there is no conflict of interest.
Ethics approval and consent to participate
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Niwas, M., Kumar, S., Rajput, R. et al. Exploring localized waves and different dynamics of solitons in (2 + 1)-dimensional Hirota bilinear equation: a multivariate generalized exponential rational integral function approach. Nonlinear Dyn 112, 9431–9444 (2024). https://doi.org/10.1007/s11071-024-09555-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09555-2