
Abstract
This paper investigates the fixed-time synchronization problems for competitive neural networks with proportional delays and impulsive effect. The concerned network involves two coupling terms, i.e., long-term memory and short-term memory, which leads to the difficulty to the dynamics analysis. Based on Lyapunov functionals, the differential inequalities and for the objective of making the settling time independent of initial condition, a novel criterion guaranteeing the fixed-time synchronization of addressed system is derived. Finally, two examples and their simulations are given to demonstrate the effectiveness of the obtained results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, various neural networks (NNs) such as cellular neural networks, Hopfield neural networks, bidirectional associative memory neural networks, and competitive neural networks have been extensively studied in both theory and application, and they have been successfully applied to signal processing, pattern recognition, associative memory, optimization problems, [1,2,3,4] and multiscale modeling [5,6,7,8]. For example, the authors in [5] present an artificial NNs-based multiscale method for coupling continuum and molecular simulations. In [6], the authors investigated the development of a neural network approach in conjunction with molecular dynamics simulations.
One of the popular NNs is competitive neural networks (CompNNs) which is introduced by Cohen and Grossberg [9] in 1983. Recently, Meyer-Bäse [10] proposed in 1996 the so-called CompNNs with different time scales. So, CompNNs with different time scales are extensions of Hopfield neural networks [11, 12], Grossberg’s shunting network [13] and Amaris model for primitive neuronal competition [14], which model the dynamics of cortical cognitive maps with unsupervised synaptic modifications. In the model of CompNNs, there are two types of state variable: that of the (STM: short-term memory) describing the fast neural activity and that (LTM: long-term memory) describing the slow unsupervised synaptic modifications.
Recently, the study of the dynamics of delayed CompNNs has been widely studied due to their important theoretical significance. On the other hand, much attention has been devoted to analyzing the synchronization of CompNNs, for example, Lou and Cui [15] studied the exponential synchronization of CompNNs by using the Lyapunov functional method and linear matrix inequality techniques. In [16] the authors introduced an adaptive feedback controller to show the complete synchronization of CompNNs with different time scales and stochastic perturbations by using the Salle-type invariance principle. By using stochastic analysis approaches and designing adaptive feedback controller, Gan et al. [17] investigated the exponential synchronization of stochastic CompNNs with different time scales, mixed time-varying delays.
In addition, time delays particularly time-varying delay can be encountered in the implementations of NNs, and the existence of time delays occurs in the response and communication time of neurons. So, it is very important to introduce the dynamics of artificial neural networks with delay [18]. Note that the delays are used in NNs models, coefficients are often constant, and delays are bounded. Contrary to the distributed delay [19,20,21] are the bounded time-varying delay [22,23,24,25,26,27,28] and the constant time delay [29]. The proportional delay \(\tau (t)=(1-q)t\) (pantograph delay factor q is a constant and satisfies \(0<q<1\)) is time-varying, less conservative, unbounded and more widely applied in real world [30].
On the other hand, in view of the importance of the control for delayed NNs, finite-time synchronization requires the master and the slave system remain completely identical after some finite time, which is called the “settling time” [31, 32]. The problem of finite-time synchronization of CompNNs is studied in [33, 34]. In [33], the authors investigated the finite-time synchronization of CompNNs with mixed delays and non-identical perturbations by using Lyapunov–Krasovskii functionals. Note that the settling time in [33] is dependent on the initial values of the coupled CompNNs.
In [34], the authors studied the finite-time synchronization of delayed CompNNs with discontinuous neuron activations by using the theory of differential inclusions, inequality techniques, nonsmooth analysis and a generalized finite-time convergence theorem and the settling time is dependent on the initial conditions. So, in practical applications, the initial conditions of the NNs must be given in advance, which limits practical applications since the knowledge of initial conditions may be difficult to adjust or even impossible to estimate [35]. To avoid this problem, we define a new concept known by the name “fixed-time stability” which was studied in [35, 36]. Fixed-time synchronization means that the system is globally finite-time synchronized and the settling time is bounded for any initial states, that is to say that the convergence settling time is independent of the initial conditions.
Motivated by the above discussions, in this paper, we study the fixed-time synchronization of CompNNs with proportional delays and impulsive effect by using Lyapunov functionals and inequality technique. Based on the fixed-time convergence theory, we establish some new and useful sufficient conditions on the fixed-time synchronization of the addressed system. The proposed controller in this paper can be used to practically secure communication with chaotic nodes, i.e., sender and receiver. The main contributions of this paper are listed as follows: (1) Sufficient conditions are obtained to guarantee that the CompNNs with proportional delays can be synchronized in fixed time; (2) the settling time of the synchronization is bounded for any initial states; (3) from the viewpoint of time delay, CompNNs with proportional delays are different from delayed CompNNs models in [33, 34], so those results in [33, 34] cannot be directly applied to the system given in this paper; (4) it is shown theoretically and numerically that the designed feedback controllers are effective. The rest of the paper is organized as follows. In Sect. 2 we will present the model of CompNNs with proportional delays. In Sect. 3 we will introduce some necessary definitions and lemmas, which will be used in the paper. In Sect. 4 some sufficient conditions are derived ensuring the fixed-time synchronization results. In Sect. 5 an example and their simulations are given to illustrate the effectiveness of our theoretical results. In Sect. 7 we give a brief conclusion.
2 Model description, notations and hypotheses
For convenience, let \({\mathbb {R}}\) denote the set of real numbers. \({\mathbb {R}}^{n}\) denotes the set of all n-dimensional real vectors (real numbers).
For any \(\{x_i\}=(x_1,x_2,\ldots ,x_n)\in {\mathbb {R}}^{n}\), \(\Vert x\Vert \) is the square norm defined by \(\Vert x\Vert =\big ( \sum\nolimits_{j=1}^{n}x^2_i\big )^\frac{1}{2}\). For a bounded and continuous function h(t), let \(h^+\), \(h^-\) be defined as
Consider the following competitive neural networks with proportional delays:
where \(n\ge 2\), \(t\ge t_0\) \(i,j=1,2\ldots ,n\), \(x_i(.)\) is the neuron current activity level; \(m_{ij}(.)\) is the synaptic efficiency; \(a_i(.)\), \({\widetilde{e}}_i(.)>0\) are the time variable of the neuron; \(b_{ij}(.)\) and \(c_{ij}(.)\) represent the connection weight and the synaptic weight of delayed feedback between the \(i{{\text {th}}}\) neuron and the \(j{{\text {th}}}\) neuron, respectively; \(y_j\) is the constant external stimulus; \(f_j(x_j(.))\) is the output of neurons; \(I_i(t)\), \(J_i(t)\) denote the external inputs on the ith neuron at time t; \(B_i(.)>0\) is the strength of the external stimulus; \(\theta _j\) are proportional delay factors and satisfy \(0<\theta _j<1\) and \(\theta _jt=t-(1-\theta _j)t\), in which \((1-\theta _j)\) correspond to the time delays required in processing and transmitting a signal from the \(j{\text {th}}\) cell to the \(i{\text {th}}\) neuron, and \((1-\theta _j)t\rightarrow +\infty \) as \(t\rightarrow +\infty \); \(\varepsilon \) is a fast time scale decided by STM and \(\varepsilon >0\), \(x_i(t^+_k)=\lim _{t\rightarrow t^+}x_i(t)\), \(m_{ij}(t^+_k)=\lim _{t\rightarrow t^+}m_{ij}(t)\), \(x_i(t^-_k)=\lim _{t\rightarrow t^-}x_i(t)\), \(m_{ij}(t^-_k)=\lim _{t\rightarrow t^-}m_{ij}(t)\). For simplicity, it is assumed that \(x_i(t^-_k)=x_i(t_k)\) and \(m_{ij}(t^-_k)=m_{ij}(t^k)\), which means \(y_i(t)\) and \(Z_i(t)\) are left continuous at each \(t_k\). The moments of impulse satisfy \(t_1<t_2<\cdots<t_k<\cdots \) and \(\lim _{k\rightarrow +\infty }t_k=+\infty \). In this paper, taking \(\varepsilon =1\) for convenience. After settling \(S_i(t)= \sum\nolimits_{j=1}^{n}y_jm_{ij}(t)=m_i(t)^Ty\), where \(y=(y_1,\ldots ,y_n)^T\), \(m_i(t)=(m_{i1}(t),\ldots ,m_{in}(t))^T\) then (1) can be written as
where \(i,j=1,2\ldots ,n\), \(|y|^2=y^2_1+y^2_2+\cdots +y^2_n\) is a constant without loss of generality, the input stimulus y is assumed to be a normalized vector with unit magnitude \(|y|^2=1\), then (2) are simplified as
The initial conditions of system (3) are given by
where \(\rho _i= \max\nolimits_{1\le j\le n}\{p_{j}\}\), \(\varphi _i(s),\;\phi _i(s)\in C([-\rho _it_0,t_0],{\mathbb {R}}^n)\) with \(C([-\rho _it_0,t_0],{\mathbb {R}}^n)\) denotes the Banach space of all continuous functions mapping \([-\rho _it_0,t_0]\) into \({\mathbb {R}}^n\).
To derive the main results, we assume that the following conditions hold:
- \({\mathbf (H1)} \):
-
The activation functions \(f_j\) satisfy the Lipschitz condition, i.e., there exist constant \(L^f_j>0\), such that \(|f_j(x)-f_j(y)|\le L^f_j|x-y|\), \(x,y\in {\mathbb {R}}\), for \(j=1,2,\ldots ,n\).
In this work, we will make drive-response chaotic neural networks with delays achieve synchronization in fixed-time by designing some effective controllers. The corresponding response system of (3) can be rewritten in the following form of an impulsive differential equation:
where \(y_i=(y_1,y_2,\ldots ,y_n)^T\), \(Z_i=(Z_1,Z_2,\ldots ,Z_n)^T\) are the response state scalar of the \(i{\text {th}}\) node, \(R_i=(R_1,R_2,\ldots ,R_n)^T\) and \(Q_i=(Q_1,Q_2,\ldots ,Q_n)^T\) donates the controller that will be appropriately designed for fixed-time synchronization objective, \(i=1,2,\ldots ,n\).
Define error states \(e_i(t)=y_i(t)-x_i(t)\) and \(\varepsilon _i(t)=Z_i(t)-S_i(t)\), we can derive the following error system
where \(F_j(e_j(t))=f_j(y_j(t))-f_j(x_j(t))\) and \(F_j(e_j(p_{j}t))=f_j(y_j(p_{j}t))-f_j(x_j(p_{j}t))\).
Remark 1
Based on Assumption \({\mathbf (H1) }\), we conclude that \(F_j(.)\) satisfies: \(|F(e_j(t))|\le L^f_j|e_j(t)|\).
3 Definitions and lemmas
In this section, we introduce some definitions and state some preliminary results
Definition 1
Let \(V: {\mathbb {R}}^{2n}\rightarrow {\mathbb {R}}_+\), then V is said to belong to class \({\mathcal {V}}\) if
-
(1)
V is continuous on each of the sets \((t_k,t_{k+1}]\times {\mathbb {R}}^{2n}\) for \(z\in {\mathbb {R}}^{2n}\), \(k\in {\mathbb {N}}\) and \(V(t,z)=\lim\nolimits_{t,z}\rightarrow (t^+_k,c)V(t^+_k,c)\) exists.
-
(2)
V is locally Lipschitzian in z.
Definition 2
The competitive neural network is said to be fixed-time synchronization if for any initial condition, there exists a settling-time function \(T(z_0)\) such that: \( \lim\nolimits_{t\rightarrow T(z_0)}\Vert e(t)\Vert =0\), \(\lim\nolimits_{t\rightarrow T(z_0)}\Vert \varepsilon (t)\Vert =0\), and \(e(t)=0\), \(\varepsilon (t)=0\), where the settling-time function is bounded, i.e., there exist constant \(T_{\max }> 0\) such that \(T(z_0)\le T_{\max },\;\;\forall z_0\in {\mathbb {R}}^{2n}\).
Lemma 1
[35] Let \(x=(x_1,x_2,\ldots ,x_n)\ge 0\), \(0<p\le 1\), \(q>1\) the following two inequalities hold: \(\sum \nolimits _{i=1}^{n}x^p_i\ge \bigg (\sum \nolimits _{i=1}^{n}x_i\bigg )^p\), \(\sum \nolimits _{i=1}^{n}x^q_i\ge n^{1-q}\bigg (\sum \nolimits _{i=1}^{n}x_i\bigg )^q\).
Lemma 2
[37] Let \(V(x(t))\in {\mathcal {V}}\) be positive definite and radially unbounded function. Assume that the following conditions are satisfied :
where \(\alpha ,\;\beta >0\), \(0<p\le 1\), \(q>1\), then the system (6) is globally fixed-time stable and the settling time bounded by
4 Main results
In this section, we will address the controller design problem for fixed time for competitive neural networks with proportional delay and impulsive perturbation.
4.1 Fixed-time synchronization with delay-dependent feedback controller
In this section, we will derive some criteria to guarantee the fixed-time synchronization between drive system (3) and response system (5). First, a delayed feedback controller is defined as follows:
where \(0<\alpha <1\), \(\beta >1,\) \(\lambda _{p},\;\rho _{p}\), \(p=1,2,3\) are the parameters to be designed later.
Theorem 1
Under Assumption (H1),the drive-response systems (3) and (5) will achieve fixed-time synchronization under controller (9) if the following conditions hold
moreover, the finite time \(t_1\)for synchronization satisfies
Proof
Consider the following Lyapunov function:
Calculating the derivative \({\dot{V}}(t)\) along the solution of system (6), we have
By using (10), and Lemma 1, we have
When \(t = t_k\), it can be obtained from (12) that
Thus, by Lemma 2, the error system (6) will converge to zero within \(t_1\), that is, the master–slave systems (3) and (5) achieve the fixed-time synchronization and the settling time is given as \(t_1\). \(\square \)
Remark 2
Note that, in Theorem 1, by designing a special fixed-time controller, we achieved the fixed-time synchronization between two chaotic competitive neural networks. On the other hand, the used control (9) is somehow expensive and not easily applicable. Below, we will modify the controller (9) to improve the applicability of our results.
- \({\mathbf (H2)} \) :
-
The activation functions \(f_j\) are bounded, i.e., there exist constant \(M_j>0\), such that \(|f_j(.)|\le M_j\), for \(j=1,2,\ldots ,n\).
4.2 Fixed-time synchronization with delay-independent feedback controller
Let the following delay-independent feedback controller :
Theorem 2
Under the assumptions (H1)–(H2), the drive-response systems (3) and (5) will achieve fixed-time synchronization under controller (16), if (10) is satisfied and
moreover, the settling time \(t_1\) for synchronization is the same as defined in Theorem 1.
Proof
Using the same Lyapunov function that defined in (12) and calculating the derivative \({\dot{V}}(t)\) along the solution of system (6) we have
Using the same discussion method as in Theorem 1, one can get that
from condition of Theorem 2 and Lemma 1, we get
When \(t = t_k\), it can be obtained from (12) that
Thus, by Lemma 2, the error system (6) will converge to zero within \(t_1\), that is, the master–slave systems (3) and (5) achieve the fixed-time synchronization and the settling time is given as \(t_1\). \(\square \)
Remark 3
Note that, the competitive neural networks models studied in [33, 34] are considered with constant coefficients. In this paper, we study the model with time-varying coefficients and without impulse. In addition, our models include models in [33, 34] as special cases when \(p_i=q_i=0\), \(a_i(t)=a_i\), \(e_i(t)=e_i\), \(B_i(t)=B_i\), \(b_{ij}(t)=b_{ij}\), \(c_{ij}(t)=c_{ij}\), \(I_i(t)=I_i\) and \(J_i(t)=0\). So, our results have been shown to be the generalization of existing results reported recently in the literature.
Remark 4
In the designed control inputs used in this works, discontinuous terms \(sgn(e_i(t))\) and \(sgn(\varepsilon_i(t))\) will result in undesirable chattering phenomenon which is undesirable in practice. In real applications, in order to attenuate the unfavorable chattering, the discontinuous terms \(sgn(e_i(t))\) and \(sgn(\varepsilon_i(t))\) are approximated by \(\frac{e_i(t)}{e_i(t)+\kappa }\) and \(\frac{\varepsilon_i(t)}{\varepsilon_i(t)+\overline{\kappa }}\), respectively, where \(\kappa >0\) and \(\overline{\kappa }>0\) are sufficiently small.
5 Numerical example
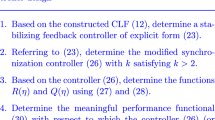
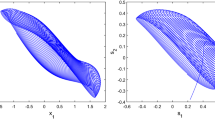
In this section, numerical example is given to show the effectiveness of the obtained theoretical analysis. Consider the following competitive neural networks with proportional delays as follows:
and the slave system described as
for \(i=1,2\), where \(a_i(t)=3+0.1\sin (t)\), \(e_i(t)=2+1.5\cos (t),\) \(I_1(t)=\sin (0.9t),\) \(I_2(t)=\cos (0.9t),\) \(J_1(t)=\sin (0.8t),\) \(J_1(t)=\cos (0.8t),\) \(\theta _j=0.5\), \(p_i=q_i=0.8,\) the activation function is described by \(f_i(x)=\tanh (x)\) and
Figure 1 presents the chaotic trajectory of (22) with initial value \(x(0)=(0.5,-0.5)^T\), \(S(0)=(0.25,-0.25)^T\).

Trajectories of x(t) and S(t) of (22)
According to the conditions presented in Theorem 1, choose \(\lambda _1=1.5200\ge -a^-_1+\frac{1}{2}L^f_1+ \sum\nolimits_{j=1}^{2}\frac{1}{2}|b_{1j}|^+L^f_j + \sum\nolimits_{j=1}^{2}\frac{1}{2}|b_{j1}|^+L^f_1+\frac{1}{2}|B_1|^+=1.5200,\;\; \lambda _1=1.5200\ge -a^-_2+\frac{1}{2}L^f_2+ \sum\nolimits_{j=1}^{2}\frac{1}{2}|b_{2j}|^+L^f_j + \sum\nolimits_{j=1}^{2}\frac{1}{2}|b_{j2}|^+L^f_2+\frac{1}{2}|B_2|^+=1.0200,\;\; \rho _1=0.1500\ge -{\tilde{e}}^-_1+\frac{1}{2}L^f_1+\frac{1}{2}|B_1|^+=0.1500,\;\; \rho _1=0.1500\ge -{\tilde{e}}^-_2+\frac{1}{2}L^f_2+\frac{1}{2}|B_2|^+=0.1500,\;\; \lambda _2=1.2>0,\; \lambda _3=1.1>0,\; \rho _2=1.1>0,\;\rho _3=1.2>0,\; \alpha =0.5,\;\beta =2.\) Thus, the control inputs of the slave system are formulated as
-
Under controller (9) the state trajectories of master/salve system are illustrated in Figs. 2, 3, 4 and 5.
-
Under controller (9) and the initial conditions \(e_1(0)=-6\), \(e_2(0)=6\), \(\varepsilon _1(0)=-4\), \(\varepsilon _2(0)=4\), the evolution of the synchronization errors is described in Fig. 6.
-
The settling time for synchronization is estimated by 1.5766.





Synchronization errors \(e_1(t)\), \(e_2(t)\), \(\varepsilon _1(t)\) and \(\varepsilon _2(t)\) under controller (9)
Remark 5
In Theorems 1–2, some auxiliary parameters \(\lambda _1\), \(\lambda _2\), \(\lambda _3\), \(\rho _1,\) \(\rho _2,\) and \(\rho _3,\) are introduced to cut down the conservatism of (10) and (11).
In practice, these parameters can be properly selected to improve the feasibility and generality of the obtained results. In addition, by choosing suitable values of these parameters, the above conditions can be always satisfied for different values of the system’s coefficients. On the other hand, when the coefficients of the system are given, the values of these parameters can be adjusted to reduce the values of the control coefficients. In general, the values of the auxiliary parameters are randomly given first (e.g., \(\lambda _1=\lambda _2=\lambda _3=\rho _1=\rho _2=\rho _3=1\)), and then adjusted appropriately according to the actual situation. As for whether an effective algorithm can be used to select these auxiliary parameters, it is still a valuable research issue.
6 Discussion and comparisons
A laterally inhibited NNs with a deterministic signal Hebbian learning law, which can model the dynamics of cortical cognitive maps with unsupervised synaptic modifications, were recently proposed and its global asymptotic stability was studied in Meyer-Bäse et al. [10, 38]. In this model, there are two types of state variables, the short-term memory variables (STM) describing the fast neural activity and the long-term memory (LTM) variables describing the slow unsupervised synaptic modifications. Thus, there are two time scales in these neural networks, in which one corresponds to the fast changes of the neural network states and another corresponds to the slow changes of the synapses by external stimuli.
Recently, many authors studied the synchronization of competitive neural networks like exponential synchronization [39], adaptive lag synchronization [40], general decay lag synchronization [41] and finite-time synchronization [42]. In practical execution, the fixed-time synchronization is more realistic and valuable. To the best of our knowledge, no such result has been proved on finite-time synchronization between impulsive competitive neural networks with time delays. Comparing with previous published results, this paper reports the optimality in settling time of synchronization. In addition, the proportional delays and impulsive effect are considered for fixed-time synchronization of delayed competitive neural networks. Thus, they can implement the abundance of flexibility and freedom in practical applications for system.
On the other hand, the fixed-time synchronization of impulsive competitive neural networks has not been seen; hence the obtained Theorems 1 and Theorem 2 are substantially new and the explored criteria can be easily expanded to the impulsive effects of study on the fixed-time synchronization of the other kinds of neural networks such as BAM neural networks, Cohen–Grossberg neural networks, and Cohen–Grossberg BAM neural networks.
7 Conclusion and future works
This paper focuses on the fixed-time synchronization problem for a class of competitive neural networks with proportional delays. Using Lyapunov functionals and analytical techniques, we obtain some sufficient conditions for the fixed-time synchronization of the master and slave of addressed systems. To the best of our knowledge, this is the first paper to study the fixed-time synchronization for CompNNs with proportional delays. Finally, an illustrated example with their simulations is given to demonstrate the effectiveness of the theoretical results.
In the present paper, we demonstrate that two different chaotic nonlinear competitive neural networks with proportional delays can be synchronized in fixed-time. In [43] the authors investigated the finite-time synchronization of neural networks with discrete and distributed delays by using periodically intermittent memory feedback control, in addition an application to secure communication is given. Therefore, studying the application of fixed-time synchronization in secure communication will be our future research interest.
References
Alimi AM, Aouiti C, Chérif F, Dridi F, M’hamdi MS (2018) Dynamics and oscillations of generalized high-order Hopfield neural networks with mixed delays. Neurocomputing. https://doi.org/10.1016/j.neucom.2018.01.061
Aouiti C, Assali EA, Gharbia IB, El Foutayeni Y (2019) Existence and exponential stability of piecewise pseudo almost periodic solution of neutral-type inertial neural networks with mixed delay and impulsive perturbations. Neurocomputing 357:292–309
Rajchakit G, Saravanakumar R (2016) Exponential stability of semi-Markovian jump generalized neural networks with interval time-varying delays. Neural Comput Appl. https://doi.org/10.1007/s00521-016-2461-y
Ma Y, Zheng Y (2016) Delay-dependent stochastic stability for discrete singular neural networks with Markovian jump and mixed time-delays. Neural Comput Appl. https://doi.org/10.1007/s00521-016-2414-5
Asproulis N, Drikakis D (2013) An artificial neural network-based multiscale method for hybrid atomistic-continuum simulations. Microfluidics Nanofluidics 15(4):559–574
Asproulis N, Drikakis D (2009) Nanoscale materials modelling using neural networks. J Comput Theoret Nanosci 6(3):514–518
Asproulis N, Kalweit M, Drikakis D (2012) A hybrid molecular continuum method using point wise coupling. Adv Eng Softw 46(1):85–92
Kalweit M, Drikakis D (2008) Coupling strategies for hybrid molecular-continuum simulation methods. Proc Inst Mech Eng Part C J Mech Eng Sci 222(5):797–806
Cohen MA, Grossberg S (1983) Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans Syst Man Cybern 5:815–826
Meyer-Bäse A, Ohl F, Scheich H (1996) Singular perturbation analysis of competitive neural networks with different time scales. Neural Comput 8(8):1731–1742
Hopfield J (1982) Neural networks and physical systems with emergent collective computational abilities. Proc Natl Acad Sci USA 79:2554–2558
Hopfield JJ (1984) Neurons with graded response have collective computational properties like those of two-state neurons. Proc Natl Acad Sci 81(10):3088–3092
Grossberg S (1976) Adaptive pattern classification and universal recoding: I. Parallel development and coding of neural feature detectors. Biol Cybern 23(3):121–134
Amari SI (1983) Field theory of self-organizing neural nets. IEEE Trans Syst Man Cybern 5:741–748
Lou X, Cui B (2007) Synchronization of competitive neural networks with different time scales. Phys A 380:563–576
Gu H (2009) Adaptive synchronization for competitive neural networks with different time scales and stochastic perturbation. Neurocomputing 73:350–356
Gan Q, Hu R, Liang Y (2012) Adaptive synchronization for stochastic competitive neural networks with mixed time-varying delays. Commun Nonlinear Sci Numer Simul 17:3708–3718
Aouiti C, Gharbia IB, Cao J, M’hamdi MS, Alsaedi A (2018) Existence and global exponential stability of pseudo almost periodic solution for neutral delay BAM neural networks with time-varying delay in leakage terms. Chaos Solitons Fractals 107:111–127
Aouiti C, M’hamdi MS, Chérif F, Alimi AM (2017) Impulsive generalised high-order recurrent neural networks with mixed delays: stability and periodicity. Neurocomputing. https://doi.org/10.1016/j.neucom.2017.11.037
Aouiti C, Coirault P, Miaadi F, Moulay E (2017) Finite time boundedness of neutral high-order Hopfield neural networks with time delay in the leakage term and mixed time delays. Neurocomputing. https://doi.org/10.1016/j.neucom.2017.04.048
Li X (2009) Existence and global exponential stability of periodic solution for impulsive Cohen–Grossberg-type BAM neural networks with continuously distributed delays. Appl Math Comput 215(1):292–307
Aouiti C, M’hamdi MS, Cao J, Alsaedi A (2017) Piecewise pseudo almost periodic solution for impulsive generalised high-order Hopfield neural networks with leakage delays. Neural Process Lett 45(2):615–648
Aouiti C, M’hamdi MS, Touati A (2017) Pseudo almost automorphic solutions of recurrent neural networks with time-varying coefficients and mixed delays. Neural Process Lett 45(1):121–140
Aouiti C, Assali EA, Gharbia IB (2019) Pseudo almost periodic solution of recurrent neural networks with D operator on time scales. Neural Process Lett 50(1):297–320
Aouiti C (2016) Neutral impulsive shunting inhibitory cellular neural networks with time-varying coefficients and leakage delays. Cognit Neurodyn 10(6):573–591
Mhamdi MS, Aouiti C, Touati A, Alimi AM, Snasel V (2016) Weighted pseudo almost-periodic solutions of shunting inhibitory cellular neural networks with mixed delays. Acta Math Sci 36(6):1662–1682
Aouiti C (2016) Oscillation of impulsive neutral delay generalized high-order Hopfield neural networks. Neural Comput Appl. https://doi.org/10.1007/s00521-016-2558-3
Li X, Cao J (2010) Delay-dependent stability of neural networks of neutral type with time delay in the leakage term. Nonlinearity 23(7):1709
Cao J, Wang J (2005) Global asymptotic and robust stability of recurrent neural networks with time delays. IEEE Trans Circuits Syst I Regul Pap 52(2):417–426
Zhou L, Zhao Z (2016) Exponential stability of a class of competitive neural networks with multi-proportional delays. Neural Process Lett 44(3):651–663
Abdurahman A, Jiang H, Teng Z (2016) Finite-time synchronization for fuzzy cellular neural networks with time-varying delays. Fuzzy Sets Syst 297:96–111
Wang W (2017) Finite-time synchronization for a class of fuzzy cellular neural networks with time-varying coefficients and proportional delays. Fuzzy Sets Syst. https://doi.org/10.1016/j.fss.2017.04.005
Li Y, Yang X, Shi L (2016) Finite-time synchronization for competitive neural networks with mixed delays and non-identical perturbations. Neurocomputing 185:242–253
Duan L, Fang X, Yi X, Fu Y (2017) Finite-time synchronization of delayed competitive neural networks with discontinuous neuron activations. Int J Mach Learn Cybern 9(10):1649–1661
Cao J, Li R (2017) Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci China Inf Sci 60(3):032201
Polyakov A (2012) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Li H, Li C, Huang T, Zhang W (2018) Fixed-time stabilization of impulsive Cohen–Grossberg BAM neural networks. Neural Netw 98:203–211
Meyer-Baese A, Pilyugin SS, Chen Y (2003) Global exponential stability of competitive neural networks with different time scales. IEEE Trans Neural Netw 14(3):716–719
Gong S, Yang S, Guo Z, Huang T (2019) Global exponential synchronization of memristive competitive neural networks with time-varying delay via nonlinear control. Neural Process Lett 49(1):103–119
Yang X, Cao J, Long Y, Rui W (2010) Adaptive lag synchronization for competitive neural networks with mixed delays and uncertain hybrid perturbations. IEEE Trans Neural Netw 21(10):1656–1667
Sader M, Abdurahman A, Jiang H (2019) General decay lag synchronization for competitive neural networks with constant delays. Neural Process Lett 50(1):445–457
Duan L, Zhang M, Zhao Q (2019) Finite-time synchronization of delayed competitive neural networks with different time scales. J Inf Optim Sci 40(4):813–837
Yang F, Mei J, Wu Z (2016) Finite-time synchronisation of neural networks with discrete and distributed delays via periodically intermittent memory feedback control. IET Control Theory Appl 10(14):1630–1640
Acknowledgements
The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work through research groups program [grant number R.G.P.1/129/40].
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Aouiti, C., Assali, E., Chérif, F. et al. Fixed-time synchronization of competitive neural networks with proportional delays and impulsive effect. Neural Comput & Applic 32, 13245–13254 (2020). https://doi.org/10.1007/s00521-019-04654-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-019-04654-3