
Abstract
In this article, the fixed-time synchronization for competitive neural networks (CNNs) with Gaussian-wavelet-type activation functions and discrete delays is investigated. Firstly, in terms of Lyapunov stability theory and inequality technique, simple synchronization conditions are obtained by designing some feedback controllers. Secondly, the activation functions adopted in CNNs are Gaussian-wavelet-type activation functions for the first time, which have great preponderance in network optimization and storage capacity. Furthermore, the settling time with upper bound of the system to achieve fixed-time synchronization can be explicitly evaluated, which is irrelevant to the initial value of the system. Finally, the theoretical results which we derived are attested to be indeed feasible in terms of two numerical simulations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
During the past decades, the research of neural networks has reached an unprecedented upsurge because of the extensive application of neural networks in a wide range of territories, such as pattern recognition, signal processing and associative memory [1,2,3,4,5]. In particular, CNNs attract a myriad of scholar’s interest [6,7,8]. We understand that lateral inhibitory neural networks with deterministic Hebbian learning laws can simulate the dynamics of the cognitive map of the cerebral cortex without being supervised synaptic modification. Subsequently, Cohen and Grossberg [9] proposed the CNNs model to simulate cell inhibition in neurobiology. Meyer-Bäse [10] put forward the CNNs with different indices at the same time. CNNs are unsupervised learning neural networks, which can simulate biological neural network system to conduct information processing by means of excitability, coordination, inhibition and competition between neurons. The input node and output node of the neural networks are completely connected, which have the characteristics of simple structure, fast operation speed and simple learning algorithm.
In competitive neural networks, when one neuron is excited, it will inhibit other neurons through its branches, which can cause competition between neurons. When more than one neuron is suppressed, the most excited neurons get rid of the inhibition of other neurons to emerge as the winner of the competition. Competitive neural networks have two state models: one state describes the dynamical behavior of neural network state changes, which is frequent and neural network is active, and the corresponding memory model is called short-term memory (STM). Another type of state variable describes the dynamical behavior of cell synaptic changes caused by external stimulation, such changes are relatively slow, and the corresponding memory model is called long-term memory (LTM). Competitive neural networks have a substantial of applications in different industries, and these applications mainly depend on their dynamical behavior, such as stability, multi-stability, synchronization and so on [11,12,13,14,15]. In [11], the author proved the existence and uniqueness of the equilibrium point in the CNNs which consider the influence of time scale parameters by using the Lipschitz method.
Activation function is an indispensable factor in the research of neural networks which have different dynamical behaviors for different activation functions. In a great deal of literatures, the main activation functions used are monotonically increasing and piecewise linear functions. In [16], another kind of non-monotonic piecewise linear activation functions which are called GWTAFs were introduced. It was proved that GWTAFs of neural networks have more equilibrium points. In [17], GWTAFs can prevent the system from falling into the crisis of local minimum and effectively improve the performance of network optimization. So, neural networks with GWTAFs have great preponderance in network optimization and storage capacity, it is necessary to research the neural networks with GWTAFs.
Synchronization represents that the state of coupled system tends to be consistent. In [18], researchers studied the competitive neural networks model of nonsmooth function and proved the existence and uniqueness of system equilibrium point based on nonsmooth analysis technology, and obtained the condition of network exponential stability. In [19], authors researched the memristor-based recurrent network model and obtained the sufficient conditions of exponential synchronization. Until now, many results have been derived for asymptotic synchronization [20,21,22,23,24,25,26]. In these papers, the synchronization time tends to infinity. In the actual situation, due to the restriction of time and resource, the asymptotic synchronization can not be well applied in practice. So many researchers shifted their attention to another kind of synchronization, namely, finite-time synchronization. It means that the system can achieve synchronization in a finite time [27,28,29,30,31,32,33]. Recently, in [34], in order to save communication resources, a novel quantized controller was designed to study the finite-time cluster synchronization of cellular neural networks. However, one disadvantage of finite-time synchronization is that its settling time depends on the initial conditions of the system. It is inconvenient in many application fields, for example, in a great deal of engineering territories, it’s difficult to get the initial conditions. In order to settle this problem, Polyakov [35] came up with fixed-time synchronization, and the settling time is a constant with upper bound irrelevant to initial value. On account of this feature, fixed-time synchronization has been widely used in signal communication [36,37,38,39,40,41]. Recently, in [42], the fixed-time synchronization of quaternion-valued memristive neural networks were studied, it has more complex dynamic behavior than traditional neural networks. Till now, there are no results about fixed-time synchronization of competitive neural networks with GWTAFs. Inspired by the above reasons, we study the problem of fixed-time synchronization of CNNs with Gaussian-wavelet-type activation functions. The main contributions are summarized in the following three aspects:
-
(1)
By designing some feedback controllers, simple synchronization conditions are obtained;
-
(2)
According to the correlative structure of competitive neural networks, the fixed-time synchronization of CNNs is gained by means of Lyapunov stability theory and inequality technique;
-
(3)
We first study the fixed-time synchronization problem of CNNs with GWTAFs, which have great preponderance in network optimization and storage capacity than general activation functions.
The following is the main structure of this article. The model and concepts are described in part 2. Fixed-time synchronization with different controllers is discussed in part 3. In part 4, numerical simulation shows the validity of the conclusion. The conclusion is described in part 5.
Notations \(\dot{x}(t)\) is the derivative of x(t). Any given vector \(x=(x_1, x_2, \dots , x_m)^T \in {\mathbb {R}}^m\), it’s norm can be defined as \(\Vert x\Vert =\max _{1\le k\le m} \{|x_k|\}\). Let the \(C((-\infty ,0],{\mathbb {R}}^m)\) is a continuous mapping from \((-\infty , 0]\) to \({\mathbb {R}}^m\) in Banach space, where norm is defined as \(\Vert \phi \Vert =\max _{1\le k\le m} \{sup_{s\in (-\infty , 0]}\phi _k(s)\}\), and \(\phi (s)=(\phi _1(s), \dots , \phi _m(s))^T \in {\mathbb {R}}^m\).
2 Preliminaries and model description
The equations for CNNs with GWTAFs and discrete delays are considered as the master system:
where m and i represent the number of the STM states and constant external stimulus, respectively. \(x_k (t)\) denotes state vector of neuron current, and \(h_{kd}(t)\) is synaptic transfer efficiency; \(\omega _d\) is the constant external stimulus; \(B_k\) is the strength of the external stimulus; \(D_{kd}\) and \(D_{kd}^{\tau }\) represent the connection weight and connection weight with feedback delay; \(I_k\) is the constant input; \(\mu _k>0,\alpha _k\ge 0\), \( \beta _k\ge 0\) are constants, and \(\tau _d(t)\) is discrete delay, which satisfies \(0\le \tau _d (t)\le \upsilon \), where \(\upsilon =\max _{1\le d\le m} \{sup_{t\in \mathbb {R}} \tau _d(t)\}\). \(f_d(\cdot )\) represent the GWTAFs, the following is the specific expression (Fig. 1):
where \(a_d, b_d, c_d, d_d, u_d, \lambda _{1,d}, \lambda _{2,d}, \lambda _{3,d}, \phi _{1,d}, \phi _{2,d}, \phi _{3,d}, U_d\) are constants with \(-\infty<a_d<b_d<c_d<d_d<\infty , \lambda _{1,d},\lambda _{3,d}>0, \lambda _{2,d}<0, u_d=f_d(c_d), U_d=f_d(b_d), d= 1, 2, \dots ,m\).

Gaussian-wavelet-type activation function (2)
Let \(S_k(t)=\sum _{d=1}^{i}h_{kd}(t) \omega _d=\omega ^{T} h_k(t)\), where \(\omega =(\omega _1, \omega _2, \dots , \omega _i)^{T}, h_k(t)=(h_{k1}(t), h_{k2}(t), \dots , h_{ki}(t))^T.\) Suppose input stimulus \(\omega \) can be normalized \(|\omega |^2=\omega _1^2+\cdots +\omega _i^2=1\).
It is obvious that the activation function \(f_d(t)\) in (2) satisfies Lipschitz condition, and the Lipschitz constant is \(\gamma _d=max\{|\omega _{1d}|, |\omega _{2d}|,|\omega _{3d}|\},d= 1, 2, \dots ,m\). The simplified equation is as below:
Suppose system (1) meets initial conditions:
Design the slave system as
where \(\zeta _k(t), \nu _k(t) \) are controllers. The corresponding initial values of the system (4) meet the conditions:
The errors are defined as \(e_k(t)=y_k(t)-x_k(t), z_k(t)=R_k(t)-S_k(t)\). The error systems can be obtained by subtracting system (4) from system (3) as follows:
where \(Q_k(t)=\sum \nolimits _{d=1}^{m}\{D_{kd}(f_d(y_d(t))-f_d(x_d(t)))+D_{kd}^{\tau }(f_d(y_d(t-\tau _d(t)))-f_d(x_d(t-\tau _d(t))))\}\), and \(f_k(e_k(t))=f_k(y_k(t))-f_k(x_k(t))\).
In order to prove the theoretical results, the following assumption is indispensable.
Assumption 1
Let \(D_k^{*}>0\) and \(D_k^{*}\ge \max \{D_{kd},D_{kd}^{\tau }\}, k= 1,2,\dots ,m,d=1,2,\dots ,i.\)
Lemma 1
By Assumption 1 we can get \( |Q_k(t)| \le \pi _k\), where \(\pi _k=\sum \nolimits _{d=1}^{m} 4U_dD_k^{*}\), \(U_d\) is maximum of the activation function \(f_d(t)\).
Proof
Based on the Assumption 1, \(D_k^{*}\ge \max \{D_{kd},D_{kd}^{\tau }\}, k= 1, 2, \dots , m, d= 1, 2, \dots , i, Q_k(t)=\sum \nolimits _{d=1}^{m}\{D_{kd}(f_d(y_d(t))-f_d(x_d(t)))+D_{kd}^{\tau }(f_d(y_d(t-\tau _d (t)))-f_d(x_d(t-\tau _d(t))))\}\), so \(|Q_k(t)|\le \sum \nolimits _{d=1}^{m} D_k^{*}\{ |(f_d(y_d(t))-f_d(x_d(t)))|+|(f_d(y_d(t-\tau _d(t)))-f_d(x_d(t-\tau _d(t))))|\}\). \(U_d\) is the maximum value of the activation functions, so we conclude that \(|Q_k(t)| \le \sum \nolimits _{d=1}^{m} 4U_dD_k^{*}\). \(\square \)
Lemma 2
[32] If \(a_1, a_2, \dots , a_m \ge 0, 0<p\le 1, q>1,\) we can get the result
Definition 1
[40] Let \(L(t)=(e_1(t), e_2(t), \dots , e_m(t), z_1(t), z_2(t), \dots , z_m(t))^T\). If there is a constant \(t^{*} (L(0))> 0\), which satisfies \(\lim \nolimits _{t\rightarrow t^{*} (L(0)) }\Vert L(t)\Vert =0\) and \(\Vert L(t)\Vert \equiv 0\) for \(\forall t>t^{*} (L(0))\), thus master-slave systems (3)–(4) realize finite-time synchronization, where \(t^{*} (L(0))\) is the settling time.
Definition 2
[36] If master–slave systems (3)–(4) meet the following two conditions, fixed-time synchronization can be achieved.
-
(a)
Master–slave systems obtain finite-time synchronization;
-
(b)
For any initial synchronization error L(0), there is a constant \(T_{max} >0\), which satisfies \(t^{*} (L(0))\le T_{max}\).
Lemma 3
[35] Suppose that \(V(\cdot ) : \mathbb {R}^n \rightarrow \mathbb {R}_{+} \cup \{0\}\) is a continuous radically unbounded function and satisfies the conditions:
-
(1)
\(V(x) = 0 \Leftrightarrow x=0\);
-
(2)
Any solution L(t) of error system (5) satisfies
$$\begin{aligned} {\dot{V}}(L(t))\le -aV^p(L(t)-bV^q(L(t)) \end{aligned}$$for some \(a, b>0, 0\le p\le 1\) and \( q>1\). So the error system (5) reach fixed-time stability, where \(T_{max}=\frac{1}{a(1-p)}+\frac{1}{b(q-1)}\).
Lemma 4
[41] Let \(V(\cdot ) : \mathbb {R}^n \rightarrow \mathbb {R}_{+} \cup \{0\}\) is a continuous radically unbounded function and meets the next two conditions:
-
(1)
\(V(x)=0\Leftrightarrow x=0\);
-
(2)
Any solution L(t) of error system (5) meets
$$\begin{aligned} {\dot{V}}(L(t))\le -aV^p(L(t))-bV^q(L(t)), \end{aligned}$$for some \(a, b>0, p=1-\frac{1}{2u}\) and \(q=1+\frac{1}{2u}\), where \(u>1.\) So the error system (5) can achieve fixed-time stability, where \(T_{max}=\frac{\pi u}{\sqrt{ab}}.\)
3 Main results
In order to make the master–slave systems realize fixed-time synchronization, design the corresponding feedback controller as
where \(j_{2k} ,c_{1k}\), and \(c_{2k}\) need satisfy some conditions, \(j_{1k}, l_{1k}\) and \(l_{2k}\) are positive constants, and \(p>1\).
Theorem 1
Suppose the Assumption 1 is satisfied, if \(j_{2k},c_{1k}\) and \(c_{2k}\) satisfy
System (3) and system (4) get fixed-time synchronization under controller (6), in addition,
where
Proof
Construct the function:
where
According to Lipschitz condition, we can get the \(f_k(e_k(t))\le \gamma _ke_k(t).\)
Then computing the derivative of \(V_1(t)\),
Calculating the derivative of \(V_2(t)\) by Lemma 1,
Therefore,
Combining (7) with (13), followed by the corresponding result,
According to Lemma 2,
where
The conditions in Lemma 3 are satisfied, so system (5) can obtain fixed-time synchronization, where
The proof is complete. \(\square \)
Then let’s think about another controller:
where \(j_{2k}, c_{1k},\) and \(c_{2k}\) needs satisfy some conditions, \(h_{1k}, h_{2k}, l_{1k}\) and \(l_{2k}\) are some non-negative constants, and \( 0<q<1, p>1\).
Theorem 2
If Assumption 1 is satisfied and \(j_{2k}\), \(c_{1k},\)\(c_{2k}\) satisfy the following conditions:
System (3) and system (4) under controller (17) get fixed-time synchronization, moreover,
where \(h=2^{\frac{q+1}{2}}\min \{\min \nolimits _k\{h_{1k}\},\min \nolimits _k \{h_{2k}\}\}\), \( l= m^{\frac{1-p}{2}}\min \{\min \nolimits _k\{l_{1k}\},\min \nolimits _k\{l_{2k}\}\}\).
Proof
Considering a similar functional
where
In the same way, we can get
Then through Lemma 2
where \(h= 2^{\frac{q+1}{2}}min\{min_k\{h_{1k}\},min_k \{h_{2k}\}\}\), \( l= m^{\frac{1-p}{2}}min\{min_k\{l_{1k}\},min_k\{l_{2k}\}\}\). Based on Lemma 3, The error system (5) gets fixed-time stability. In addition,
This completes the proof.\(\square \)
Corollary 1
Assume the conditions given in Theorem 2 are always true. If p and q in controller (17) satisfy the following expressions:
where \(u>1\), then \(\frac{q+1}{2}=1-\frac{1}{2u},\frac{p+1}{2}=1+\frac{1}{2u}\). According to the Lemma 4, the error system (5) gets fixed-time stability. Moreover, \(T_{max}\) can be calculated
where
Remark 1
In controllers (6) and (17), \(sign(e_k(t))\) and \(sign(z_k(t))\) are discontinuous functions, for this reason, it is difficult to be used in engineering. So we use the continuous functions \(\frac{e_k(t)}{e_k(t)+\phi }\), \(\frac{z_k(t)}{z_k(t)+\varphi }\) to replace them, where \(\phi >0\), \(\varphi >0 \).
4 Numerical simulation
Example 1
Consider the CNNs with GWTAFs and discrete delays model (24) with the following parameters: \( m = 2, \mu _1=0, \mu _2=2,\alpha _1=\alpha _2=1,\beta _1=\beta _2=1,B_1=B_2=1,D_{11}=0.25,D_{12}=-0.4,D_{11}^\tau =-1.5,D_{12}^\tau =-0.1,D_{21}=-1.9,\)\(D_{22}=0.5,D_{21}^\tau =-0.2,D_{22}^\tau =-2.3,I_1=sin(t),I_2=cos(t), \tau _1(t)=\tau _2(t)=2\),
The initial values of the system (1) meet the following conditions
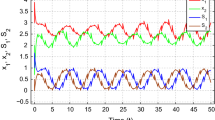
The initial values of corresponding slave system (4) are \(y_1(t)=2, y_2(t)=1, R_1(t)=1.5, R_2(t)=2, t\in [-2,0]\). The output of systems (3) and (4) without controllers is showed in Fig. 2.
Choosing \(j_{11} = j_{12}= 1, c_{11} = 7.5, c_{12} = 3.5, l_{11} = l_{12} = 0.25, j_{21} = 4.5, j_{22} = 10.7, c_{21} = 1, c_{22} = 0.5, l_{21} = l_{22} = 0.25, q= 1.5\) as parameters of controller (6). System (3) and system (4) under the controller (6) get fixed-time synchronization, and \(T_{max}\approx 10.93\). In Fig. 3, the error system converges to 0 within \(T_{max}\). So Theorem 1 is valid.

State trajectories of error system without control

State trajectories of error system under the controller (6)
Example 2
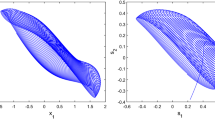
Consider the same model in the example 1, \(m = 2, \mu _1=0,\mu _2=2, D_{11}=0.25, D_{12}=-0.14, D_{11}^\tau =-1.5, D_{12}^\tau =-0.1, D_{21}=-1.9, D_{22}=0.5, D_{21}^\tau =-0.2, D_{22}^\tau =-2.3, B_1=B_2=1, \alpha _1=\alpha _2=1,\)\( \beta _1=\beta _2=1, I_1(t)=sin(t), I_2(t)=cos(t).\)\(f_1(t)\) and \(f_2(t)\) have the same expression in (24), \(\tau _1=\tau _2=2\). The initial conditions of systems (3)–(4) are \(x_1(t)=-3, x_2(t)=3, S_1(t)=-2.1, S_2(t)=6, t\in [-2,0]\), \(y_1(t)=4, y_2(t)=1.5, R_1(t)=3.5, R_2(t)=2.2, t\in [-2,0].\)
Selecting the parameters in controller (17) as follows: \(c_{11}=0.5,c_{12}=3.5,h_{11}=h_{12}=0.5,l_{11}=l_{12}=0.25,j_{21}=4.5,j_{22}=10.7,c_{21}=1,c_{22}=3.5,h_{21}=h_{22}=0.5,l_{21}=l_{22}=0.25,p=1.5,q=0.5.\) It is observed from Fig. 4 that the master and slave systems (3)–(4) without controllers eventually diverge. In Fig. 5, we see that the master-slave systems with controller (17) realize synchronization, and \(T_{max}\approx 11.9.\)

State trajectories of error system without control

State trajectories of error system under the controller (17)
5 Conclusion
In this article, the problem of fixed-time synchronization for CNNs with GWTAFs and discrete delays has been researched. Simple synchronization conditions are obtained by designing some uncomplicated feedback controllers. The neural networks with GWTAFs can optimize the neural network effectively and have more storage capacity. The settling time of fixed-time synchronization is irrelevant to the initial values of the system. Finally, the theoretical results which we derived are attested to be indeed feasible by two numerical examples. Further research is mainly on fixed-time synchronization of QVNNs with event-triggered control.
References
Cao, J.: An estimation of the domain of attraction and convergence rate for Hopfield continuous feedback neural networks. Phys. Lett. A 325(5), 370–374 (2004)
Lu, J., Cao, J.: Synchronization-based approach for parameters identification in delayed chaotic neural networks. Physica A Stat. Mech. Appl. 382(2), 672–682 (2007)
Song, Q., Yu, Q., Zhao, Z., Liu, Y., Fuad, E.: Boundedness and global robust stability analysis of delayed complex-valued neural networks with interval parameter uncertainties. Neural Netw. 103, 55–62 (2018)
Cao, J., Feng, G., Wang, Y.: Multistability and multiperiodicity of delayed Cohen–Grossberg neural networks with a general class of activation functions. Physica D Nonlinear Phenom. 237(13), 1734–1749 (2008)
Wang, L., Song, Q., Liu, Y., Zhao, Z., Alsaadi, F.E.: Global asymptotic stability of impulsive fractional-order complex-valued neural networks with time delay. Neurocomputing 243, 49–59 (2017)
Nie, X., Cao, J.: Multistability of second-order competitive neural networks with nondecreasing saturated activation functions. IEEE Trans. Neural Netw. 22(11), 1694–1708 (2011)
Duan, L., Huang, L.: Global dynamics of equilibrium point for delayed competitive neural networks with different time scales and discontinuous activations. Neurocomputing 123(13), 318–327 (2014)
Ye, M., Zhang, Y.: Complete convergence of competitive neural networks with different time scales. Neural Process. Lett. 21(1), 53–60 (2005)
Cohen, M., Grossberg, S.: Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans. Syst. Man Cybern. 13(5), 815–826 (1983)
Meyer-Bäse, A., Ohl, F., Scheich, H.: Singular perturbation analysis of competitive neural networks with different time scales. Neural Comput. 8(8), 1731–1742 (1996)
Gu, H., Jiang, H., Teng, Z.: Existence and global exponential stability of equilibrium of competitive neural networks with different time scales and multiple delays. J. Frankl. Inst. 347(5), 719–731 (2010)
Meyer-Bäse, A., Roberts, R., Thümmler, V.: Local uniform stability of competitive neural networks with different time-scales under vanishing perturbations. Neurocomputing 73(4), 770–775 (2010)
Meyer-Bäse, A., Botella, G., Rybarska-Rusinek, L.: Stochastic stability analysis of competitive neural networks with different time-scales. Neurocomputing 118(11), 115–118 (2013)
Nie, X., Cao, J.: Multistability of competitive neural networks with time-varying and distributed delays. Nonlinear Anal. Real World Appl. 10(2), 928–942 (2009)
Meyer-Bäse, A., Roberts, R., Yu, H.: Robust stability analysis of competitive neural networks with different time-scales under perturbations. Neurocomputing 71(1), 417–420 (2007)
Nie, X., Cao, J., Fei, S.: Multistability and instability of delayed competitive neural networks with nondecreasing piecewise linear activation functions. Neurocomputing 45, 799–821 (2019)
Zhao, L., Sun, M., Cheng, J., Xu, Y.: A novel chaotic neural network with the ability to characterize local features and its application. IEEE Trans. Neural Netw. 20(4), 735–742 (2009)
Yang, X., Huang, C., Cao, J.: An LMI approach for exponential synchronization of switched stochastic competitive neural networks with mixed delays. Neural Comput. Appl. 21(8), 2033–2047 (2012)
Wu, A.: Synchronization control of a class of memristor-based recurrent neural networks. Inf. Sci. 183(1), 106–116 (2012)
Huang, T., Li, C., Yu, W., Chen, G.: Synchronization of delayed chaotic systems with parameter mismatches by using intermittent linear state feedback. Nonlinearity 22(3), 569–584 (2009)
Yang, X., Cao, J., Long, Y., Rui, W.: Adaptive lag synchronization for competitive neural networks with mixed delays and uncertain hybrid perturbations. IEEE Trans. Neural Netw. 21(10), 1656–1667 (2010)
Lu, H., Amari, S.I.: Global exponential stability of multitime scale competitive neural networks with nonsmooth functions. IEEE Trans. Neural Netw. 17(5), 1152–64 (2006)
Yang, X., Cao, J., Liang, J.: Exponential synchronization of memristive neural networks with delays: interval matrix method. IEEE Trans. Neural Netw. Learn. Syst. 28(8), 1878–1888 (2017)
Lu, J., Ho, D.W.C., Cao, J., Jürgen, K.: Exponential synchronization of linearly coupled neural networks with imulsive disturbances. IEEE Trans. Neural Netw. 22(2), 329–336 (2011)
Abdurahman, A., Jiang, H., Teng, Z.: Finite-time synchronization for memristor-based neural networks with time-varying delays. Neural Netw. 69(3), 20–28 (2015)
Feng, Y., Yang, X., Song, Q., Cao, J.: Synchronization of memristive neural networks with mixed delays via quantized intermittent control. Appl. Math. Comput. 339, 874–887 (2018)
Li, H., Cao, J., Jiang, H., Alsaedi, A.: Finite-time synchronization and parameter identification of uncertain fractional-order complex networks. Physica A Stat. Mech. Appl. 533, 122027 (2019)
Zhang, S., Yang, Y., Sui, X., Xu, X.: Finite-time synchronization of memristive neural networks with parameter uncertainties via aperiodically intermittent adjustment. Physica A Stat. Mech. Appl. 534, 122258 (2019)
Yang, X., Cao, J., Song, Q., Chen, X., Feng, J.: Finite-time synchronization of coupled Markovian discontinuous neural networks with mixed delays. Circuits Syst. Signal Process. 352(10), 4382–4406 (2015)
Bao, H., Cao, J.: Finite-time generalized synchronization of nonidentical delayed chaotic systems. Nonlinear Anal. Model. Control 21(3), 306–324 (2016)
Li, Y., Yang, X., Shi, L.: Finite-time synchronization for competitive neural networks with mixed delays and non-identical perturbations. Neurocomputing 57(8), 0925–2312 (2016)
Polyakov, A., Efimov, D., Perruquetti, W.: Robust stabilization of MIMO systems in finite/fixed time. Int. J. Robust Nonlinear Control 26(1), 69–90 (2016)
Liu, X., Cao, J., Yu, W., Song, Q.: Nonsmooth finite-time synchronization of switched coupled neural networks. IEEE Trans. Cybern. 46(10), 2360–2371 (2016)
Tang, R., Yang, X., Wan, X.: Finite-time cluster synchronization for a class of fuzzy cellular neural networks via non-chattering quantized controllers. Neural Netw. 113, 79–90 (2019)
Polyakov, A.: Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 57(8), 2106–2110 (2012)
Deng, H., Bao, H.: Fixed-time synchronization of quaternion-valued neural networks. Physica A Stat. Mech. Appl. 527, 121351 (2019)
Cao, J., Li, R.: Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci. China Inf. Sci. 60(3), 032201 (2017)
Hu, C., Yu, J., Chen, Z., Jiang, H., Huang, T.: Fixed-time stability of dynamical systems and fixed-time synchronization of coupled discontinuous neural networks. Neural Netw. 89, 74–83 (2017)
Chen, C., Li, L., Peng, H., Yang, Y.: Fixed-time synchronization of memristor-based BAM neural networks with time-varying discrete delay. Neural Netw. 96, 47–54 (2017)
Bhat, S.P., Bernstein, D.S.: Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38(3), 751–766 (2000)
Parsegov, S.E., Polyakov, A.E., Shcherbakov, P.S.: Nonlinear fixed-time control protocol for uniform allocation of agents on a segment. Dokl. Math. 87(1), 133–136 (2013)
Wei, R., Cao, J.: Fixed-time synchronization of quaternion-valued memristive neural networks with time delays. Neural Netw. 113, 1–10 (2019)
Acknowledgements
This work was jointly supported by the National Natural Science Foundation of China under Grant Nos. 61973258 and 61573291, and the National Natural Science Foundation of Chongqing under Grant No. cstc2019jcy-msxmX0452.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhou, J., Bao, H. Fixed-time synchronization for competitive neural networks with Gaussian-wavelet-type activation functions and discrete delays. J. Appl. Math. Comput. 64, 103–118 (2020). https://doi.org/10.1007/s12190-020-01346-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-020-01346-3
Keywords
- Fixed-time synchronization
- Competitive neural networks
- Gaussian-wavelet-type activation functions
- Discrete delays