
Abstract
A novel charge-controlled memcapacitor 3D chaotic oscillator with two unstable equilibriums is proposed. Various dynamic properties of the proposed system are derived and investigated to show the existence of chaotic oscillations. Fractional-order analysis of the chaotic oscillator shows that the maximum value for the largest positive Lyapunov exponent is exhibited in fractional order. Adomian decomposition method is used to discretize the fractional-order system. Field-programmable gate arrays are used to realize the proposed oscillator. In addition, random number generator is designed by employing this novel chaotic system in its fractional-order form.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Designing new chaotic systems with interesting features has attracted lots of interest recently. Some of these chaotic systems can be categorized according to their equilibria: chaotic systems with no equilibrium points [1, 2], with only stable equilibria [3, 4], with curves of equilibria [5], with surfaces of equilibria [6, 7] and with non-hyperbolic equilibria [8, 9]. Some other examples unrelated to equilibria are chaotic systems with multiscroll attractors [10,11,12], with multistability [13,14,15], with different kinds of symmetry [16,17,18] and with the algebraically simplest equations [19,20,21,22].
Chua [23] introduced the fourth circuit element, popularly known as memristors, in 1971. Memristors are considered to be highly nonlinear with nonvolatile characteristics and can be implemented with nanoscale technologies [24,25,26,27]. Memristor-based chaotic oscillators have been widely investigated in the recent years. Some examples are circuits with two HP memristors in antiparallel [28], a current feedback op-amp-based memristor oscillators [29] and a practical implementation of memristor-based chaotic circuits with off-the-shelf components [30]. Also memristor-based chaotic circuit for pseudorandom number generation has been analyzed in a cryptography application study [31].
Recently many researchers have discussed about fractional-order calculus and its applications [32,33,34]. For example, fractional-order nonlinear systems with different control approaches have been investigated [35,36,37], and fractional-order memristor-based no equilibrium chaotic and hyperchaotic systems are proposed [38,39,40,41].
Implementation of chaotic and hyperchaotic system using field-programmable gate arrays (FPGAs) has been widely investigated [42,43,44]. Chaotic random number generators have been implemented in FPGA for applications in image cryptography [45] or FPGA-implemented Duffing oscillator-based signal detectors has been proposed [46].
In the next section, we introduce a memcapacitor-based 3D chaotic oscillator with two unstable equilibriums. In Sect. 3, we analyze it carefully through dissipativity, equilibrium points, Lyapunov exponents (LE), Kaplan–Yorke (KY) dimension, bifurcation, and bicoherence in detail. Section 4 deals with the circuit implementation of the memcapacitor chaotic system. In Sects. 5 and 6, fractional-order form of chaotic memcapacitor system and its dynamic analysis are presented. Sections 7 and 8 illustrate a FPGA-based practical application and random number generator design with the fractional-order chaotic system. Finally, conclusions are given in Sect. 9.
2 Problem formulation
Many memcapacitor models with piecewise linear, quadric and cubic functions have been discussed in the literature [47,48,49,50]. Some interesting properties such as hidden attractors [51,52,53,54], coexistence attractors [55,56,57] and extreme multistability [58,59,60,61] were found in the memcapacitor-based chaotic oscillators.
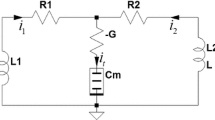
In this study, a novel memcapacitor chaotic oscillator (NMCO) with charge-controlled memcapacitor, discussed in [62], as shown in Fig. 1 is investigated.

Memcapacitor-based chaotic oscillator

a \(x-y\) plane, b \(x-z\) plane and c \(y-z\) plane phase portraits of system (3) when \(a_{1} = 1.638\), \(a_2 = -\,0.963\), \(a_3 = 4.5\), \(a_4 = 0.7\), \(a_5 = -\,0.4\) and \(a_6 = -\,1.75\)
In Fig. 1 R, L, G and C represent resistance, inductances, conductance and capacitance, respectively. \(C_{m} \)is the memcapacitor as discussed in [62, 63]. The current flowing through the circuit is \(i_G,i_R,i_{C_m},i_L\) applying Kirchhoff’s law to the circuit shown in Fig. 1,
where \(q_{C_m}\) represents the memcapacitor charge, and \(V_{C}\) and \(V_{Cm}\) represent voltage across capacitor and memcapacitor, respectively. Voltage of a charge-controlled memcapacitor can be written as:
where \(\alpha \) and \(\beta \) are memcapacitor parameters such that \(\alpha -\beta \sigma \) is the inverse of memcapacitance (\(C_m^{-1}\)) and \(\sigma =\sigma _0 +\int _t^\smallint {t}_0 (t)\mathrm{d}t\). If Eq. (2) is substituted into Eq. (1), it can be seen that Eq. (1) has four state variables namely: \(q_{C_m},V_C,\sigma \) and \(i_L\). If the initial value of \(\sigma \) is taken very small (i.e., close to zero), then \(\sigma \approx \int _{t_0}^{t}q_{cm}(t)\mathrm{d}t\). By taking time integral of Eq. (1), the number of state variable can be reduced to three. The time integral of Eq. (1) is
where \(\sigma \approx \int _{t_0}^{t}q_{cm}(t)\mathrm{d}t\), \(\varphi _{c} =\int v_{c}(t)\mathrm{d}t\), \(\varphi c_m =\int v_{m}(t)\mathrm{d}t\) and \(q_L =\int \imath _{L} (t)\mathrm{d}t\).
The time integral of memcapacitor voltage can be written as:
By substituting time integral of memcapacitor voltage given in Eq. (4) into Eq. (3), the following equation system is obtained
The state variables of Eq. (5) are \(\sigma ,\varphi _C\) and \(q_L \). Let us define new state variables as \(x=\sigma ,y=\varphi _c \) and \(z=-Rq_L \) and let us define \(\tau =\frac{t}{RC}\).
where the parameters are defined as \(a_1 =C\alpha (RG-1),a_2 =-\frac{C\beta }{2}(RG-1),a_3 =C,a_4 =\alpha ,a_5=-\frac{\beta }{2},a_6 =-\frac{R^{2}C}{L}\) and for the values of \(L=0.13H,C=3.57F,G=2.1,?R=211\Omega ,\alpha =0.7F^{-1}\) and \(\beta =0.8F^{-1}c^{-1}s^{-1}\), and the NMCO system shows chaotic oscillations and the corresponding parameter values are derived as, \(a_1 =1.638,a_2 =-\,0.936,a_3 =4.5,a_4 =0.7,a_5 =-\,0.4\) and \(a_6 =-\,1.75\). The initial conditions are chosen as [0.001, 0.001, 0.001]. Figure 2 shows the 2D phase portraits of system (6).
3 Dynamic analysis of hyperchaotic memcapacitor oscillator (NMCO)
The dynamic properties of the NMCO system namely dissipativity, equilibrium points, eigenvalues, Lyapunov exponents (LE) and Kaplan–Yorke (KY) dimension are derived and discussed in this section.
3.1 Dissipativity, equilibrium points, Lyapunov exponents and Kaplan–Yorke dimension
The divergence of Eq. (3) is
This shows that it is dissipative if \({<}x{>}\) be smaller than \(\frac{1-a_1 }{2a_2 }\), where \({<}x{>}\) represents the arithmetic average of x. Hence, the system volume is going to be reduced to zero, and the NMCO system (3) converges to a strange attractor of the system asymptotically. By equating\({{X}}=0\), the NMCO system (3) shows two equilibrium points \(E_1 =[0,0,0]\) and \(E_2 =[-a_1 /a_2,0,0]\). By calculating the characteristic equation of the system, it can be seen that both equilibria are unstable. The Jacobian method is employed in calculation of the LEs of the NMCO system. The numerical value of LEs of the NMCO system are
Since there is a positive LE in (5), the NMCO system (3) has chaotic solutions. The sum of LEs of the NMCO system (3) is given below which is negative.
The dissipativity of the NMCO system (3) can be shown with Eq. (6). The KY dimension of the NMCO system (3) is
which is fractional.
3.2 Bifurcation
To understand the parameter dependence of the NMCO system, we derive and investigate the bifurcation plots. By changing all of its six parameters, this NMCO system exhibits a familiar period doubling to enter chaos. However, for simplicity, only bifurcation diagram and Lyapunov exponents diagram with changing parameter \(a_1\) are shown in Fig. 3.

a Bifurcation diagram of system (3) with respect to parameter \(a_1\) (\(y_{\mathrm{max}}\) are the local maxima of y signal and the initial values are (0.1, 0.1, 0.1)) and b Lyapunov exponents of system (3) with respect to parameter \(a_1\). The rest of the parameters are \(a_2= -\,0.963\), \(a_3 = 4.5\), \(a_4 = 0.7\), \(a_5 = -\,0.\)4 and \(a_6 = -\,1.75\)

Bicoherence plot of NMCO system for state x with sampling frequency of 1.5 KHz
3.3 Bicoherence
Higher-order spectra have been used to study the nonlinear interactions between frequency modes [64, 65]. Let x(t) be a stationary random process defined as,
where w is the angular frequency, n is the frequency modal index and \(A_n \) are the complex Fourier coefficients. The power spectrum can be defined as,
and discrete bispectrum can be defined as,
If the modes are independent, then the average triple products of Fourier components is zero resulting in a zero bispectrum [64]. The study of bicoherence is to give an indication of the relative degree of phase coupling between triads of frequency components. There are two main reasons to employ bicoherence analysis. The first one is obtaining information about deviations due to Gaussianity and suppressing colored Gaussian noise. The second one is that signals with asymmetric nonlinearities can be detected and identified with bicoherence analysis. It is a third-order spectrum as it can be seen in Eq. (10), while as it can be seen in Eq. (9) power spectrum is a second order. Power spectrum and bispectrum can be defined as \({X}'\left( f \right) *X\left( f \right) \) and \(X\left( {f_j } \right) *X\left( {f_k } \right) *{X}'\left( {f_j +f_k } \right) \), respectively, where \(X\left( f \right) \) represents Fourier transform of x(t) and \({X}'\left( f \right) \) represents Fourier transform of conjugate of x(t). It can be understood that the bispectrum is a complex function of two frequencies \((f_j,f_k )\). Bicoherence is square of amplitude. To calculate the bispectrum, the time series are divided into M parts and each part has length of N. Then, their Fourier transforms and biperiodogram are calculated. Finally, they are averaged over all segments. Although the inputs of bicoherence functions are two different frequencies and their summation, the output of the function is one-dimensional. Hence, bicoherence can be considered as a function of sum of two frequencies. Pezeshki [66] gives autobispectrum of a chaotic system. Autobispectrum is calculated from the Fourier coefficients.
where \(w_n \) is the radian frequency and A is the Fourier coefficients. The square of bicoherence can be written as
where \(P(\omega _1)\) and \(P(\omega _2)\) are the power spectrums at \(f_1 \) and \(f_2 \).
Figures 4 and 5 show the bicoherence contours of the FONMCO system for state x and all states together, respectively. Yellow-colored parts show the multifrequency components contributing to the power spectrum. As it is shown in Figs. 4 and 5, the cross-bicoherence is nonzero and non-constant; hence, the state relationship is nonlinear. As shown in Fig. 4, the spectral power is very low as compared to the spectral power of all states together (Fig. 5) indicating the existence of multifrequency nodes. Also Fig. 5 shows the nonlinear coupling (straight lines connecting multiple frequency terms) between the states. The yellow shades/lines and non-sharpness of the peaks and the structure around the origin in figures indicate that the nonlinear relation of the states x, y, z is not of the quadratic nonlinearity. The most two dominant frequencies (\(f_1\), \(f_2\)) are selected to obtain bicoherence contour. As a reference frequency, the sampling frequency (\(f_s\)) is selected. To derive the power spectrum for individual frequencies, direct FFT is used and Hankel operator is used as the frequency mask. Hanning window is used as the FIR filter to separate the frequencies [40].

Bicoherence plot of NMCO system for all states with sampling frequency of 1.5 KHz
4 Circuit implementation of the memcapacitor chaotic system
There are many works in the literature related to electronic circuit designs [67,68,69,70,71,72,73,74,75,76,77]. In this section, the circuit design of memcapacitor chaotic system (3) is differently implemented in the oscilloscope as real-time engineering application. The chaotic memcapacitor in this work has been exhibited noise-like behaviors because its signal values are very low as shown in Fig. 2. So, chaotic system are firstly scaled to increase the signal values for electronic circuit application.
For scaling process, let \(X = 5x\), \(Y = 5y\), \(Z = 5z\), and then, setting the original state variables x, y, z as X, Y, Z the scaled chaotic memcapacitor system becomes as follows.
Finally, scaled chaotic memcapacitor system are given by
In Fig. 6 are shown the new phase portraits of scaled memcapacitor oscillator with increased amplitude values. After these processes, we can do electronic circuit design as real-time application.

2D and 3D phase portraits of the scaled memcapacitor oscillator (3): a \(x-y\), b \(x-z\), c \(y-z\), d \(x-y-z\)
The designed electronic circuit of the scaled memcapacitor chaotic system is given in Fig. 7. The circuit consists of basic electronic components such as resistors, capacitor, op-amps and multipliers.

Electronic circuit of the scaled chaotic memcapacitor system
\(\hbox {R}1=244~\hbox {k}\Omega \), \(\hbox {R}2=213~\hbox {k}\Omega \), \(\hbox {R}3 = 89~\hbox {k}\Omega \), \(\hbox {R}4=\hbox {R}5=100~\hbox {k}\Omega \), \(\hbox {R}6=570~\hbox {k}\Omega \), \(\hbox {R}7=500~k\Omega \), \(\hbox {R}8=\hbox {R}9=400~\hbox {k}\Omega \), \(\hbox {R}10=\hbox {R}11=100~\hbox {k}\Omega \), \(\hbox {R}13=228~\hbox {k}\Omega \), \(\hbox {R}14=\hbox {R}15=100~\hbox {k}\Omega \), \(\hbox {C}1=\hbox {C}2=\hbox {C}3=1~\hbox {nF}\), \(\hbox {Vn}=-\,15~\hbox {V}\), \(\hbox {Vp}=15~\hbox {V}\) were chosen. The oscilloscope outputs of memcapacitor chaotic system are shown in Fig. 8 for \(x-y\), \(x-z\) and \(y-z\) planes.

2D phase portraits of the chaotic memcapacitor on the oscilloscope. The initial conditions and parameter values are taken as in Sect. 2: a \(x-y\), b \(x-z\), c \(y-z\)
Also, the experimental circuit of the chaotic memcapacitor circuit is shown in electronic card in Fig. 9 for \(x-z\) plane.

Experimental circuit of the chaotic memcapacitor circuit
5 Fractional-order NMCO system (FONMCO)
In this section, modeling of the fractional-order form of the hyperchaotic memcapacitor oscillator (FONMCO) is introduced. Grunwald–Letnikov, Riemann–Liouville and Caputo [32,33,34] are the usually employed methods for the fractional-order differential operator. In the study, Grunwald–Letnikov (GL) method is employed and given as
where D refers to the fractional-order generalization, \(\Delta _h^q f(t)\) is generalized difference, h is the step size, a and t are limits, and q is the fractional order of the differential equation.
Equation (16) can be written as
where \(b_{j}\) is binomial and given as
In theory, calculation of fractional-order differential equation requires use of infinite memory, but in practice, the equation given below is used for the calculation.
where L and h represents the memory length sampling time, respectively.
Using (16)–(19), the FONMCO system is derived as,
where \(q_x,q_y,q_z\) are the fractional orders of the FONMCO system. The 2D phase portraits of the FONMCO system is given Fig. 10. The system parameters and the initial values are as same as in the system discussed in Sect. 2.

2D phase portraits of the FONMCO system, \(q=0.992\)
6 Dynamic analysis of the FONMCO chaotic systems
6.1 Bifurcation with fractional order
Some of the FONMCO system dynamic properties such as LEs and bifurcation remain similar to the that of the NMCO chaotic systems [38, 39] if \(q_x,q_y,q_z >0.983\). For a fractional-order system, investigation of bifurcation with fractional order is very important. As shown in Fig. 11, bifurcation of the FONMCO system for change in fractional order shows that the systems’ chaotic oscillations remain if \(q_i >0.983\) and when \(q=0.992\) the largest positive Lyapunov exponent is \(L_1 =0.118\), while for the integer-order case the largest Lyapunov exponent is \(L_1 =0.105\). Figure 12a–f shows the 2D phase portraits in \(X-Y\) plane for different fractional orders.

Fractional-order bifurcation plot

2D phase portrait (\(X-Y\) plane) of FONMCO system for different fractional orders a \(q= 0.999\), b \(q=0.995\), c \(q=0.992\), d \(q=0.990\), e \(q=0.985\), f \(q=0.983\)
6.2 Stability analysis
6.2.1 Commensurate order
For a q-order commensurate FONMCO system, the system shows chaotic oscillations if
where \(J_E\) is the Jacobian matrix at the equilibrium E and \(\lambda _i\) are the eigenvalues of the FONMCO system for \(i=1,2,3\). The eigenvalues must be in the unstable region and stability condition for the FONMCO system is \(q>\frac{2}{\pi }\tan ^{-1} \left( {\frac{\left| {\mathrm {Im}}\lambda \right| }{{\mathrm {Re}}\lambda }}\right) \). The NMCO system shows two equilibrium at \(E_1 =[0,0,0]\) and \(E_2 =[-\,1.75,0,0]\), and the characteristic equation for the commensurate orders \(q=0.99\) for the equilibrium point \(E_1\) is given by \(\lambda ^{297}+3\lambda ^{199}+2.638\lambda ^{198}+3\lambda ^{101}+5.276\lambda ^{100}+0.238\lambda ^{99}+\lambda ^{3}+2.638\lambda ^{2}+0.238\lambda +2.8665\) and at \(E_2\) is \(\lambda ^{297}+3\lambda ^{199}-0.638\lambda ^{198}+3\lambda ^{101}-1.276\lambda ^{100}+3.262\lambda ^{99}+\lambda ^{3}-0.638\lambda ^{2}+3.262\lambda -2.8665\).
6.2.2 Incommensurate order
The FONMCO system shows chaotic oscillations for the given condition below.
where M is the least common multiple (LCM) of the fractional orders. If \(q_x =0.99,q_y =0.99,q_z =0.98,q_w =0.98\), then \(M=100\). The characteristic equation of the system at the equilibriums is \(\det (\hbox {diag}[\lambda ^{Mq_x},\lambda ^{Mq_y},\lambda ^{Mq_z}]-J_E)=0\); then, we get \(\det (\hbox {diag}[\lambda ^{99},\lambda ^{99},\lambda ^{98}]-J_E )=0\) and the characteristic equation at equilibrium point \(E_1\) is \(\lambda ^{296}+\lambda ^{199}+3\lambda ^{198}+1.638\lambda ^{197}+2\lambda ^{101}+4.638\lambda ^{100}+1.876\lambda ^{99}+\lambda ^{3}+2.638\lambda ^{2}+0.238\lambda +2.8665\) and at the equilibrium point \(E_2\) is \(\lambda ^{296}+\lambda ^{199}+3\lambda ^{198}-1.638\lambda ^{197}+2\lambda ^{101}+1.362\lambda ^{100}+1.624\lambda ^{99}+\lambda ^{3}-0.638\lambda ^{2}+3.262\lambda -2.8665\). For the values of parameters mentioned in Sect. 2, the solution of the characteristic equation is approximated to \(\lambda _{296} =1.848\) and whose argument is zero and which is the minimum argument, and hence, the stability necessary condition becomes \(\frac{\pi }{200}-0>0\) which solves for \(0.0157>0\).
7 FPGA implementation of the FONMCO systems
The three main approaches to solve fractional-order chaotic systems are frequency-domain method [78], Adomian decomposition method (ADM) [79] and Adams–Bashforth–Moulton (ABM) algorithm [80]. Among these three methods, ADM is the most advantageous one for obtaining accurate results with less computational power [81, 82]. Hence, the proposed FONMCO system is implemented in FPGA by applying ADM scheme. The most challenging issue in the FPGA realization of the FONMCO system is that there is no available block for the fractional-order integrator in the system generator [39,40,41]. Because the ADM algorithm converges fast [82, 83], for obtaining FONMCO system solution the first 6 terms are taken. For real cases, it is impossible to find the accurate value of x when t takes larger values [84]. Hence, a discretization method in time is designed. That is to say, for a time interval of \(\hbox {ti}\) (initial time) to \(\hbox {tf}\) (final time), we divide the interval into (tn, tn+1) and we get the value of \(x(n + 1)\) at time \(\hbox {tn}+1\) by applying x(n) at time \(t_{n}n \) using the relation \(x(n+1)=F(x(n))\) [84]. We use the ADM method [79, 84] to discretize the fractional-order CA system for implementing in FPGA. The fractional-order discrete form of the dimensionless state equations for the FONMCO system can be given as,
where \(p_i^j\) are the Adomian polynomials with \(i=1,2,3\) and \(p_1^0 =x_n,p_2^0 =y_n,p_3^0 =z_n\). The Adomian first polynomial is derived as,
The Adomian second polynomial is derived as,
The Adomian third polynomial is derived as,

RTL schematics of the FONMCO system implemented in Kintex 7 (\(\hbox {Device}=7k160t~\hbox {Package}=\hbox {fbg}484\) S). The sampling time of the system is kept at 0.01 s to minimize the time slack errors. The entire system is configured for a 32-bit operation
The Adomian fourth polynomial is derived as,
The Adomian fifth polynomial is derived as,
The Adomian sixth polynomial is derived as,
where \(h =t n+1 - t n \) and \(\Gamma (\dot{)}\) is the gamma function. The fractional-order discretized system (21) is then implemented in FPGA, and the necessary Adomian polynomials are calculated using (22)–(27). For implementing in FPGA, the value of h is taken as 0.001 s and the initial values are fed into the forward register with fractional order \(q=0.992\) for FONMCO system. Figure 13 shows the RTL schematics of the FONMCO system implemented in Kintex 7. Figure 14a shows the power consumed by FONMCO system for order \(q=0.992\), and Fig. 14b shows the power consumed for various fractional orders and it can be seen that maximum power is consumed when the FONMCO system exhibits the largest Lyapunov exponent. Table 1 shows the resources consumed with the consumed clock frequencies, and Fig. 15 shows the 2D phase portraits of the FPGA-implemented FONMCO system.

a Power consumed by FONMCO system for \(q=0.998\), b power consumed by FONMCO system for various fractional orders. It can be seen that maximum power of 0.204 W is consumed for order \(q=0.998\) when the FONMCO system shows the largest Lyapunov exponents

2D phase portraits of the FPGA-implemented FONMCO system. The initial conditions and parameter values are taken as in Sect. 2, and the order of the system is \(q=0.992\); a X–Y plane, b X–Z plane, c Y–Z plane
8 Random number generator with FONMCO system
Random numbers are used in many areas, e.g., video games, encryption, drawing of lots and weather forecast simulations [85,86,87]. In the literature, jitter [88], metastable [89] and chaotic systems [70, 72, 76, 90,91,92,93,94,95] are also used as a source of entropy. In the paper, a design of random number generator (RNG) is realized with FONMCO whose entropy source is a chaotic system. The chaotic system used in the paper is fractional order and to the best knowledge of authors there is no this type of study in the literature. The fractional-order chaotic system used in random number generation is as follows.
\(q_{x},q_{y}\) and \(q_{z}\) values are fractional order of the system and all of these values are taken as 0.992. The phase portraits of the system are shown in Fig. 10. The both parameter values and initial conditions of the system are as same as in the non-fractional-order memcapacitor system.
Random number generator design steps with fractional-order chaotic system are as given in Algorithm 1. As it is given in the algorithm, for random number generation, order of the chaotic system and its parameter and initial values are needed. Any change in these parameters will result in generation of different random numbers. The addition of fractional order to the random number generation is an important factor for security. If the generated random numbers are used in encryption, the fractional order of the chaotic system has to be known exactly to regenerate the same random numbers. As a next step, after entering initial and parameter values, time step is determined in order to discretize time series of the fractional-order chaotic system and then discretized with RK4 which is differential equation solving method.
After the discretization process, the obtained floating-based x, y and z outputs is converted into 32-bit binary number; hence, random number generation process is realized. For the random number generation, the last 16 bits of output x, the last 12 bits of output y and the last 16 bits of output z are taken.
To evaluate the performance of the generated number series, NIST-800-22 tests [96] are employed. The NIST test is the most widely used test to evaluate randomness of the number series. In order to be considered successful in passing the NIST-800-22 tests, the P value must be greater than 0.001 for the all tests. The NIST-800-22 tests results of generated numbers from x, y and z outputs are given in Table 2.

9 Conclusions
A memcapacitor chaotic oscillator with two unstable equilibrium points is proposed and investigated. Dynamic properties of the proposed system are investigated. The fractional-order model of the proposed chaotic oscillator is derived and analyzed. The largest Lyapunov exponent of the system is found to exist in the fractional order. Adomian decomposition method is used to discretize the fractional-order system for implementing in FPGA. The fractional-order FPGA-implemented chaotic oscillator is investigated, and the power consumption analysis confirms the existence of the systems’ largest Lyapunov exponent in its fractional order.
References
Jafari, S., Sprott, J.C., Golpayegani, S.M.R.H.: Elementary quadratic chaotic flows with no equilibria. Phys. Lett. A 377(9), 699–702 (2013)
Wei, Z.: Dynamical behaviors of a chaotic system with no equilibria. Phys. Lett. A 376(2), 102–108 (2011)
Molaie, M., Jafari, S., Sprott, J.C., Golpayegani, S.M.R.H.: Simple chaotic flows with one stable equilibrium. Int. J. Bifurc. Chaos 23(11), 1350188 (2013)
Wang, X., Chen, G.: A chaotic system with only one stable equilibrium. Commun. Nonlinear Sci. Numer. Simul. 17(3), 1264–1272 (2012)
Barati, K., Jafari, S., Sprott, J.C., Pham, V.-T.: Simple chaotic flows with a curve of equilibria. Int. J. Bifurc. Chaos 26(12), 1630034 (2016)
Jafari, S., Sprott, J.C., Molaie, M.: A simple chaotic flow with a plane of equilibria. Int. J. Bifurc. Chaos 26(06), 1650098 (2016)
Jafari, S., Sprott, J.C., Pham, V.-T., Volos, C., Li, C.: Simple chaotic 3D flows with surfaces of equilibria. Nonlinear Dyn 86(2), 1349–1358 (2016)
Wei, Z., Sprott, J.C., Chen, H.: Elementary quadratic chaotic flows with a single non-hyperbolic equilibrium. Phys. Lett. A 379(37), 2184–2187 (2015)
Wei, Z., Zhang, W., Yao, M.: On the periodic orbit bifurcating from one single non-hyperbolic equilibrium in a chaotic jerk system. Nonlinear Dyn 82(3), 1251–1258 (2015)
Wang, L.: 3-scroll and 4-scroll chaotic attractors generated from a new 3-d quadratic autonomous system. Nonlinear Dyn 56(4), 453–462 (2009)
Munoz-Pacheco, J.M., Tlelo-Cuautle, E., Toxqui-Toxqui, I., Sanchez-Lopez, C., TrejoGuerra, R.: Frequency limitations in generating multi-scroll chaotic attractors using cfoas. Int. J. Electron. 101(11), 1559–1569 (2014)
Tlelo-Cuautle, E., Rangel-Magdaleno, J.J., Pano-Azucena, A.D., Obeso-Rodelo, P.J., Nunez-Perez, J.C.: FPGA realization of multi-scroll chaotic oscillators. Commun. Nonlinear Sci. Numer. Simul 27(1), 66–80 (2015)
Lai, Q., Chen, S.: Generating multiple chaotic attractors from sprott b system. Int. J. Bifurc. Chaos 26(11), 1650177 (2016)
Kengne, J., Negou, A.N., Tchiotsop, D.: Antimonotonicity, chaos and multiple attractors in a novel autonomous memristor-based jerk circuit. Nonlinear Dyn 88(4), 2589–2608 (2017)
Sharma, P.R., Shrimali, M.D., Prasad, A., Kuznetsov, N.V., Leonov, G.A.: Control of multistability in hidden attractors. Eur. Phys. J. Spec. Top. 224(8), 1485–1491 (2015)
Li, C., Hu, W., Sprott, J.C., Wang, X.: Multistability in symmetric chaotic systems. Eur. Phys. J. Spec. Top. 224(8), 1493–1506 (2015)
Sprott, J.C.: Symmetric time-reversible flows with a strange attractor. Int. J. Bifurc. Chaos 25(05), 1550078 (2015)
Sprott, J.C.: Simplest chaotic flows with involutional symmetries. Int. J. Bifurc. Chaos 24(01), 1450009 (2014)
Brummitt, C.D., Sprott, J.C.: A search for the simplest chaotic partial differential equation. Phys. Lett. A 373(31), 2717–2721 (2009)
Gottlieb, H.P.W., Sprott, J.C.: Simplest driven conservative chaotic oscillator. Phys. Lett. A 291(6), 385–388 (2001)
Sprott, J.C.: Simple chaotic systems and circuits. Am. J. Phys. 68(8), 758–763 (2000)
Sprott, J.C.: Some simple chaotic flows. Phys. Rev. E 50(2), R647 (1994)
Chua, L.: Memristor-the missing circuit element. IEEE Trans. Circuit Theory 18(5), 507–519 (1971)
Buscarino, A., Fortuna, L., Frasca, M., Gambuzza, L.V.: A gallery of chaotic oscillators based on HP memristor. Int. J. Bifurc. Chaos 23(05), 1330015 (2013)
Barboza, R., Chua, L.O.: The four-element chua’s circuit. Int. J. Bifurc. Chaos 18(04), 943–955 (2008)
Bao, B.-C., Liu, Z., Xu, J.-P.: Dynamical analysis of memristor chaotic oscillator (2010). http://wulixb.iphy.ac.cn/EN/abstract/abstract17028.shtml
Chua, L.O., Kang, S.M.: Memristive devices and systems. Proc IEEE 64(2), 209–223 (1976)
Buscarino, A., Fortuna, L., Frasca, M., Gambuzza, L.V.: A chaotic circuit based on hewlett-packard memristor. Chaos Interdiscip. J. Nonlinear Sci. 22(2), 023136 (2012)
Hong, Q.-H., Li, Z.-J., Zeng, J.-F., Zeng Y.-C.: Design and simulation of a memristor chaotic circuit based on current feedback op amp (2014)
Muthuswamy, B.: Implementing memristor based chaotic circuits. Int. J. Bifurc. Chaos 20(05), 1335–1350 (2010)
Corinto, F., Krulikovskyi, V., Haliuk, S.D.: Memristor-based chaotic circuit for pseudo-random sequence generators. In: Electrotechnical Conference (MELECON), 2016 18th Mediterranean, pp. 1–3. IEEE (2016)
Baleanu, D., Diethelm, K., Scalas, E., Trujillo, J.J.: Fractional Calculus: Models and Numerical Methods, vol. 5. World Scientific, Singapore (2016)
Zhou, Y., Wang, J.R., Zhang, L.: Basic Theory of Fractional Differential Equations. World Scientific, Singapore (2016)
Diethelm, Kai: The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type. Springer, Berlin (2010)
Aghababa, M.P.: Robust finite-time stabilization of fractional-order chaotic systems based on fractional lyapunov stability theory. J. Comput. Nonlinear Dyn. 7(2), 021010 (2012)
Boroujeni, E.A., Momeni, H.R.: Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Signal Process. 92(10), 2365–2370 (2012)
Zhang R., Gong J. (2014) Synchronization of the fractional-order chaotic system via adaptive observer. Syst. Sci. Control Eng. Open Access J. 2(1):751–754
Rajagopal, K., Guessas, L., Karthikeyan, A., Srinivasan, A., Adam, G.: Fractional order memristor no equilibrium chaotic system with its adaptive sliding mode synchronization and genetically optimized fractional order pid synchronization. Complexity 2017, (2017)
Rajagopal, K., Karthikeyan, A., Srinivasan, A.K.: FPGA implementation of novel fractional-order chaotic systems with two equilibriums and no equilibrium and its adaptive sliding mode synchronization. Nonlinear Dyn. 87(4), 2281–2304 (2017)
Rajagopal, K., Guessas, L., Vaidyanathan, S., Karthikeyan, A., Srinivasan, A.: Dynamical analysis and FIGA implementation of a novel hyperchaotic system and its synchronization using adaptive sliding mode control and genetically optimized PID control. Math. Probl. Eng. 2017, 7307452 (2017) . https://doi.org/10.1155/2017/7307452
Rajagopal, K., Karthikeyan, A., Duraisamy, P.: Hyperchaotic chameleon: fractional order FPGA implementation. Complexity (in press) https://www.hindawi.com/journals/complexity/aip/8979408
Tlelo-Cuautle, E., Pano-Azucena, A.D., Rangel-Magdaleno, J.J., Carbajal-Gomez, V.H., Rodriguez-Gomez, G.: Generating a 50-scroll chaotic attractor at 66 mhz by using fpgas. Nonlinear Dyn. 85(4), 2143–2157 (2016)
Wang, Q., Yu, S., Li, C., Lü, J., Fang, X., Guyeux, C., Bahi, J. M.: (2016) Theoretical design and FPGA-based implementation of higher-dimensional digital chaotic systems. IEEE Trans. Circuits Syst. I Regul. Pap. 63(3):401–412
Dong, E., Liang, Z., Du, S., Chen, Z.: Topological horseshoe analysis on a four-wing chaotic attractor and its fpga implement. Nonlinear Dyn. 83(1–2), 623–630 (2016)
Tlelo-Cuautle, E., Carbajal-Gomez, V.H., Obeso-Rodelo, P.J., Rangel-Magdaleno, J.J., Nunez-Perez, J.C.: FPGA realization of a chaotic communication system applied to image processing. Nonlinear Dyn. 82(4), 1879–1892 (2015)
Rashtchi, V., Nourazar, M.: FPGA implementation of a real-time weak signal detector using a duffing oscillator. Circuits Syst. Signal Process. 34(10), 3101–3119 (2015)
Wang, G.-Y., Jin, P.-P., Wang, X.-W., Shen, Y.-R., Yuan, F., Wang, X.-Y.: A flux-controlled model of meminductor and its application in chaotic oscillator. Chin. Phys. B 25(9), 090502 (2016)
Pershin, Y.V., Di Ventra, M.: Emulation of floating memcapacitors and meminductors using current conveyors. Electron. Lett. 47(4), 243–244 (2011)
Yu, D.S., Liang, Y., Chen, H., Iu, H.H.C.: Design of a practical memcapacitor emulator without grounded restriction. IEEE Trans. Circuits Syst. II Exp. Briefs 60(4), 207–211 (2013)
Fitch, A.L., Iu, H.H.C., Yu, D.S.: Chaos in a memcapacitor based circuit. In: Circuits and Systems (ISCAS), 2014 IEEE International Symposium on, pp. 482–485. IEEE (2014)
Rajagopal, K., Akgul, A., Jafari, S., Karthikeyan, A., Koyuncu, I.: Chaotic chameleon: Dynamic analyses, circuit implementation, fpga design and fractionalorder form with basic analyses. Chaos Solitons Fractals 103, 476–487 (2017)
Pham, V.-T., Volos, C., Jafari, S., Wang, X., Vaidyanathan, S.: Hidden hyperchaotic attractor in a novel simple memristive neural network. Optoelectron. Adv. Mater. Rapid. Commun. 8(11–12), 1157–1163 (2014)
Pham, V.T., Jafari, S., Vaidyanathan, S., Volos, C., Wang, X.: A novel memristive neural network with hidden attractors and its circuitry implementation. Sci. China Technol. Sci. 59(3), 358–363 (2016)
Pham, V.-T., Vaidyanathan, S., Volos, C.K., Jafari, S., Kuznetsov, N.V., Hoang, T.M.: A novel memristive time-delay chaotic system without equilibrium points. Eur. Phys. J. Spec. Top. 225(1), 127–136 (2016)
Wei, Z., Pehlivan, I.: Chaos, coexisting attractors, and circuit design of the generalized sprott c system with only two stable equilibria. Optoelectron. Adv. Mater. Rapid Commun. 6(7–8), 742–745 (2012)
Shahzad, M., Pham, V.-T., Ahmad, M.A., Jafari, S., Hadaeghi, F.: Synchronization and circuit design of a chaotic system with coexisting hidden attractors. Eur. Phys. J. Spec. Top. 224(8), 1637–1652 (2015)
Kengne, J., Njitacke, Z.T., Negou, A.N., Tsostop, M.F., Fotsin, H.B.F.: Coexistence of multiple attractors and crisis route to chaos in a novel chaotic jerk circuit. Int. J. Bifurc. Chaos 26(05), 1650081 (2016)
Bao, B., Jiang, T., Xu, Q., Chen, M., Wu, H., Hu, Y.: Coexisting infinitely many attractors in active band-pass filter-based memristive circuit. Nonlinear Dyn. 86(3), 1711–1723 (2016)
Bao, B.-C., Xu, Q., Bao, H., Chen, M.: Extreme multistability in a memristive circuit. Electron. Lett. 52(12), 1008–1010 (2016)
Bao, B.C., Bao, H., Wang, N., Chen, M., Xu, Q.: Hidden extreme multistability in memristive hyperchaotic system. Chaos Solitons Fractals 94, 102–111 (2017)
Bao, B., Jiang, T., Wang, G., Jin, P., Bao, H., Chen, M.: Two-memristorbased chuas hyperchaotic circuit with plane equilibrium and its extreme multistability. Nonlinear Dyn. 89, 1157 (2017). https://doi.org/10.1007/s11071-017-3507-0
Wang G, Shi C, Wang X, Yuan F.: Coexisting oscillation and extreme multistability for a memcapacitor-based circuit. Math. Probl. Eng. 2017, 6504969 (2017). https://doi.org/10.1155/2017/6504969
Wang, G., Jiang, S., Wang, X., Shen, Y., Yuan, F.: A novel memcapacitor model and its application for generating chaos. Math. Probl. Eng. 2016, (2016)
Leenaerts, D.M.W.: Higher-order spectral analysis to detect power-frequency mechanisms in a driven chua’s circuit. Int. J. Bifurc. Chaos 7(06), 1431–1440 (1997)
Pradhan, C., Jena, S.K., Nadar, S.R., Pradhan, N.: Higher-order spectrum in understanding nonlinearity in EEG rhythms. Comput. Math. Methods Med. 2012, 206857 (2012). https://doi.org/10.1155/2012/206857
Pezeshki, C., Elgar, S., Krishna, R.C.: Bispectral analysis of possessing chaotic motion. J. Sound Vib. 137(3), 357–368 (1990)
Li, C., Pehlivan, I., Sprott, J.C., Akgul, A.: A novel four-wing strange attractor born in bistability. IEICE Electron. Exp. 12(4), 1–12 (2015)
Akgul, A., Calgan, H., Koyuncu, I., Pehlivan, I., Istanbullu, A.: Chaosbased engineering applications with a 3d chaotic system without equilibrium points. Nonlinear Dyn. 84(2), 481–495 (2016)
Akgul, A., Pehlivan, I.: A new three-dimensional chaotic system without equilibrium points, its dynamical analyses and electronic circuit application. Tech. Gazette 23(1), 209–214 (2016)
Akgul, A., Moroz, I., Pehlivan, I., Vaidyanathan, S.: A new fourscroll chaotic attractor and its engineering applications. Optik Int. J. Light Electron Opt. 127(13), 5491–5499 (2016)
Akgul, A., Hussain, S., Pehlivan, I.: A new three-dimensional chaotic system, its dynamical analysis and electronic circuit applications. Optik Int. J. Light Electron Opt. 127(18), 7062–7071 (2016)
Jafari, M.A., Mliki, E., Akgul, A., Pham, V.-T., Kingni, S.T., Wang, X., Jafari, S.: Chameleon: the most hidden chaotic flow. Nonlinear Dyn. 88, 2303 (2017). https://doi.org/10.1007/s11071-017-3378-4
Hu, W., Akgul, A., Li, C., Zheng, T., Li, P.: A switchable chaotic oscillator with two amplitude-frequency controllers. J. Circuits Syst. Comput. 26(10), 1750158 (2017)
Wei, Z., Moroz, I., Sprott, J.C., Akgul, A., Zhang, W.: Hidden hyperchaos and electronic circuit application in a 5d self-exciting homopolar disc dynamo. Chaos Interdiscip. J. Nonlinear Sci. 27(3), 033101 (2017)
Kai, G., Zhang, W., Wei, Z.C., Wang, J.F., Akgul, A.: Hopf bifurcation, positively invariant set, and physical realization of a new four-dimensional hyperchaotic financial system. Math. Probl. Eng. 2017, (2017)
Volos, C., Akgul, A., Pham, V.-T., Stouboulos, I., Kyprianidis, I.: A simple chaotic circuit with a hyperbolic sine function and its use in a sound encryption scheme. Nonlinear Dyn. 89, 1047 (2017). https://doi.org/10.1007/s11071-017-3499-9
Akgul, A., Li, C., Pehlivan, I.: Amplitude control analysis of a four-wing chaotic attractor, its electronic circuit designs and microcontroller-based random number generator. J. Circuits Syst. Comput. 26, 1750190 (2017). https://doi.org/10.1142/S0218126617501900
Charef, A., Sun, H.H., Tsao, Y.Y., Onaral, B.: Fractal system as represented by singularity function. IEEE Trans. Autom. Control 37(9), 1465–1470 (1992)
Adomian, G.: A review of the decomposition method and some recent results for nonlinear equations. Math. Comput. Model. 13(7), 17–43 (1990)
Sun, H.H., Abdelwahab, A., Onaral, B.: Linear approximation of transfer function with a pole of fractional power. IEEE Trans. Autom. Control 29(5), 441–444 (1984)
Tavazoei, M.S., Haeri, M.: Unreliability of frequency-domain approximation in recognising chaos in fractional-order systems. IET Signal Process. 1(4), 171–181 (2007)
Shao-Bo He, Ke-Hui Sun, and Hui-Hai Wang. Solution of the fractional-order chaotic system based on adomian decomposition algorithm and its complexity analysis (2014). http://wulixb.iphy.ac.cn/EN/abstract/abstract57588.shtml
Caponetto, R., Fazzino, S.: An application of adomian decomposition for analysis of fractional-order chaotic systems. Int. J. Bifurc. Chaos 23(03), 1350050 (2013)
He, S., Sun, K., Wang, H.: Complexity analysis and dsp implementation of the fractional-order lorenz hyperchaotic system. Entropy 17(12), 8299–8311 (2015)
Bratley, P., Fox, B.L., Schrage, L.E.: A Guide to Simulation. Springer, Berlin (2011)
Jacoboni, C., Lugli, P.: The Monte Carlo Method for Semiconductor Device Simulation. Springer, Berlin (2012)
Akgul, A., Kacar, S., Aricioglu, B., Pehlivan, I.: Text encryption by using one-dimensional chaos generators and nonlinear equations. In: Electrical and Electronics Engineering (ELECO), 2013 8th International Conference on, pp. 320–323. IEEE (2013)
Tuncer, T., Avaroglu, E., Turk, M., Ozer, A.B.: Implementation of nonperiodic sampling true random number generator on FPGA. J. Microelectron. Electron. Compon. Mater. 44(4), 296–302 (2014)
Vasyltsov, I., Hambardzumyan, E., Kim, Y.-S., Karpinskyy, B.: Fast digital trng based on metastable ring oscillator. In: International Workshop on Cryptographic Hardware and Embedded Systems, pp. 164–180. Springer (2008)
Ergun, S., Ozoguz, S: A chaos-modulated dual oscillator-based truly random number generator. In: Circuits and Systems, 2007. ISCAS 2007. IEEE International Symposium on, pp. 2482–2485. IEEE (2007)
Yalcin ME, Suykens JAK, Vandewalle J (2004) True random bit generation from a double-scroll attractor. IEEE Trans. Circuits Syst. I Regul. Pap. 51(7):1395–1404
Stojanovski T, Kocarev L (2001) Chaos-based random number generators-part i: analysis [cryptography]. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 48(3):281–288
Stojanovski T., Pihl J., Kocarev L. (2001) Chaos-based random number generators-Part ii: practical realization. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 48(3):382–385
Callegari, S., Rovatti, R., Setti, G.: Embeddable adc-based true random number generator for cryptographic applications exploiting nonlinear signal processing and chaos. IEEE Trans. Signal Process. 53(2), 793–805 (2005)
Çavuşoǧlu, Ü., AkgÜl, A., Kaçar, S., Pehlivan, I., Zengin, A.: A novel chaos-based encryption algorithm over TCP data packet for secure communication. Secur. Commun. Netw 9(11), 1285–1296 (2016)
Rukhin, A., Soto, J., Nechvatal, J., Barker, E., Leigh, S., Levenson, M., Banks, D., Heckert, A., Dray, J., Vo, S. et al.: Statistical test suite for random and pseudorandom number generators for cryptographic applications, NIST special publication. (2010)
Acknowledgements
This work was partially supported by Sakarya University Scientific Research Projects Unit under Grants 2016-09-00-008, 2016-50-01-026. It was also partially supported by Iran National Science Foundation (No. 96000815). The authors thank Mr. Soroush Dehghan and Mr. Navid Hasanzadeh for help and comments which enhanced the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Rajagopal, K., Akgul, A., Jafari, S. et al. A chaotic memcapacitor oscillator with two unstable equilibriums and its fractional form with engineering applications. Nonlinear Dyn 91, 957–974 (2018). https://doi.org/10.1007/s11071-017-3921-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3921-3