
Abstract
Blasting, as the most frequently used method for hard rock fragmentation, is a hazardous aspect in mining industries. These operations produce several undesirable environmental impacts such as ground vibration, air-overpressure (AOp), and flyrock in the nearby environments. These environmental impacts may cause injury to human and damage to structures, groundwater, and ecology of the nearby area. This paper is aimed to predict the blasting environmental impacts in granite quarry sites through two intelligent systems, namely artificial neural network (ANN) and adaptive neuro-fuzzy inference system (ANFIS). For this purpose, 166 blasting operations at four granite quarry sites in Malaysia were investigated and the values of peak particle velocity (PPV), AOp, and flyrock were precisely recorded in each blasting operation. Considering some model performance indices including coefficient of determination (R 2), value account for (VAF), and root mean square error (RMSE), and also using simple ranking procedure, the best models for prediction of PPV, AOp, and flyrock were selected. The results demonstrated that the ANFIS models yield higher performance capacity compared to ANN models. In the case of testing datasets, the R 2 values of 0.939, 0.947, and 0.959 for prediction of PPV, AOp, and flyrock, respectively, suggest the superiority of the ANFIS technique, while in predicting PPV, AOp, and flyrock using ANN technique, these values are 0.771, 0.864, and 0.834, respectively.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Blasting is a common technique of rock fragmentation in quarry and mining operations as well as some civil engineering applications such as tunneling and road construction. In quarry operations, blasting consists of drilling several rows of blast-holes almost parallel to the free face of the bench. These operations create several environmental impacts such as air overpressure, ground vibration, flyrock, and back-break around the blasting zone (Monjezi and Dehghani 2008; Fisne et al. 2011; Jahed Armaghani et al. 2013; Hajihassani et al. 2014a; Ebrahimi et al. 2015). There are some empirical equations for prediction of these environmental impacts. Nevertheless, these equations just consider limited numbers of influential parameters on them whereas these impacts are also affected by other effective factors such as blast geometry and geological conditions (Douglas 1989; Singh and Singh 2005). As a result, empirical approaches are not accurate enough, while sometimes prediction of the environmental impact values with higher accuracy is essential to minimize environmental damage due to blasting operations (Jahed Armaghani et al. 2013; Hajihassani et al. 2014a).
Ground vibration is defined as a wave motion which spreads away from the blast to nearby areas (Khandelwal and Singh 2009; Bakhshandeh Amnieh et al. 2012). The ground vibrations can be determined in terms of peak particle velocity (PPV) and frequency. As mentioned in several standards (Bureau of Indian Standard 1973), PPV is considered as a vibration index, which is an important indicator to control the structural damage criteria. High ground vibration can cause damage to the surrounding structures, groundwater, and ecology of the nearby area (Singh and Singh 2005; Monjezi et al. 2010a; Hajihassani et al. 2014b). Several parameters such as blast design, distance between the blast-face and monitoring point, rock mass mechanical properties, explosive charge weight per delay, and geological conditions are the most influential parameters on ground vibration induced by blasting (Wiss and Linehan 1978; Khandelwal and Singh 2006).
Air overpressure (AOp) is created by a large shock wave from explosion point to the free surface. The pressures of AOp waves contain an audible high-frequency and subaudible low-frequency sound. Normally, four main sources can cause AOp waves in blasting operations: air pressure pulse which is rock displacement at bench face, rock pressure pulse which is induced by ground vibration, gas release pulse which is the escape of gases through rock fractures, and finally stemming release pulse which is the escape of gases from the blasthole when the stemming is ejected (Wiss and Linehan 1978; Siskind et al. 1980; Morhard 1987). AOp may cause damage to structures and should be kept below critical ranges (Kuzu et al. 2009; Rodriguez et al. 2010). AOp is influenced by several factors such as explosive charge weight per delay, blast geometry, distance between blast-face and monitoring point, length of stemming, geological discontinuities, and blasting direction (Konya and Walter 1990; Khandelwal and Kankar 2011).
Excessive random throw of rock fragments beyond the blast safety area can be defined as flyrock (Khandelwal and Monjezi 2013; Raina et al. 2014). In the mechanism of flyrock, three parameters namely rock mass mechanical strength, charge confinement, and explosive energy distribution are in an affective relationship to each other and any mismatch between these parameters can create flyrock (Bajpayee et al. 2004). When flyrock happens, huge energy is used to throw the rock rather than creation of fragmented rock (Roy 2005). Flyrock induced by blasting can cause damage to structures and injury to human (Kecojevic and Radomsky 2005; Roy 2005; Khandelwal and Monjezi 2013). Inadequate burden and spacing, inadequate stemming, inaccurate drilling, overloaded holes, excessive powder factor, and unfavorable geological conditions may produce flyrock (Hemphill 1981; Bhandari 1997).
Utilizing soft computing methods such as artificial neural network (ANN) (Khandelwal et al. 2011; Tonnizam Mohamad et al. 2012; Monjezi et al. 2013a), fuzzy inference system (FIS) (Mohamed 2011), and adaptive neuro-fuzzy inference system (ANFIS) (Iphar et al. 2008) for prediction of blasting environmental impacts are recently highlighted in literatures. In this study, two intelligent systems namely ANN and ANFIS were used to predict blasting environmental impacts including PPV, AOp, and flyrock using the datasets obtained from four granite quarry sites in Malaysia.
Prediction methods of blasting environmental impacts
Peak particle velocity
Various empirical predictors have been established to predict PPV by several scholars (Duvall and Petkof 1959; Langefors and Kihlstrom 1963; Davies et al. 1964; Bureau of Indian Standard 1973; Ghosh and Daemen 1983; Roy 1993). However, in a particular blasting, predicted PPV values obtained by these predictors are different and there is no homogeneity in their results. Furthermore, these empirical predictors only consider two influential parameters including charge per delay and distance from blast-face whereas PPV is also influenced by other effective parameters such as blast geometry and geological conditions (Jahed Armaghani et al. 2013).
Apart from the empirical predictors, soft computing techniques have been extensively used to predict PPV. ANN and regression analysis were applied to predict PPV by Singh and Singh (2005). They demonstrated that ANN is a more accurate technique in comparison to regression analysis for PPV prediction. Fisne et al. (2011) utilized fuzzy logic approach and classical regression analysis to predict PPV using 33 datasets obtained from Akdaglar quarry in Turkey. In their research, charge weight and distance from blast-face were considered as input parameters. They concluded that the predicted PPVs obtained from fuzzy model were much closer to the measured values in comparison to those predicted by statistical models. Monjezi et al. (2013a) predicted PPV values using different empirical equations and ANN technique. They compared the computed results with the actual field data obtained from Shur River Dam in Iran. Finally, they found that the results of ANN model are more accurate in comparison to those of empirical equations. In the other study, Saadat et al. (2014) predicted 69 PPV values obtained from Gol-E-Gohar iron mine in Iran by using ANN. For the sake of comparison, they compared the ANN results with common empirical approaches and multiple linear regression (MLR). It was found that the ANN approach performs better in comparison to empirical and MLR models.
Air overpressure
Many attempts have been made to develop empirical approach for prediction of AOp induced by blasting. Rodriguez et al. (2007) established semi-empirical method for prediction of AOp due to blasting outside a tunnel. Their method was surveyed with several cases, and they found that it can be used under different conditions. A new empirical relationship for prediction of AOp was developed by Kuzu et al. (2009) using two parameters including the distance between blast-face and monitoring point as well as weight of explosive materials. They concluded that the proposed equation predicts AOp with reasonable degree of accuracy. Segarra et al. (2010) proposed a new AOp predictive equation using recorded data from two quarries. AOp values were measured from 122 records in 40 blasting operations in the rocks with low to very low strength. Finally, they presented a predictive equation with 32 % of accuracy.
In addition to empirical methods, the use of soft computing approaches for AOp prediction is recently highlighted. An ANN model was presented for prediction of AOp by Khandelwal and Singh (2005) using weight of explosive as well as distance between blast-face and monitoring point. They compared the ANN results with the US Bureau of Mines (USBM) predictor and MLR technique and concluded that the ANN yields better estimation of AOp values compared to other methods. Mohamed (2011) used ANN and FIS to predict AOp. He compared the results of predictive models with the values obtained by regression analyses and observed field data. From that study, it was found that the ANN and fuzzy models are accurate predictive models for AOp estimation. Support vector machine (SVM) technique was applied to predict AOp by Khandelwal and Kankar (2011) using 75 datasets obtained from three mines in India. They compared AOp values predicted by SVM with the results of generalized predictor equation. The results demonstrated that the estimated values of AOp using SVM are much closer to the actual values. A combination of PSO and ANN approaches was presented to predict AOp by Hajihassani et al. (2014a). Two empirical formulas were also established to predict AOp values using distances of 300 and 600 m. Finally, they found that the PSO-ANN technique is an applicable tool to predict AOp with high degree of accuracy.
Flyrock
Several empirical equations have been established by some researchers to predict flyrock distance. An empirical equation based on hole and rock diameters was developed by Lundborg et al. (1975) as follows:
in which L m is the maximum throw of the rock (m), D is hole diameter (in.), and T b is the rock size (m). Another equation was proposed using stemming length and burden parameters by Gupta (1990), as given below:
where L is the ratio of stemming length to burden, and D is the distance of thrown fragments (m). Ghasemi et al. (2012a) developed an empirical equation for flyrock prediction using dimensional analysis as follows:
where B is burden, S is spacing, S t is stemming, H is blasthole length, D is diameter of blasthole, P is powder factor, and Q is mean charge per blasthole. Coefficient of determination (R 2) equals to 0.83 shows the high prediction performance of the proposed equation.
In another empirical study, Trivedi et al. (2014) proposed an equation to predict flyrock distance using multivariate regression analysis. To do this, they monitored 95 blasting operations of four opencast limestone mines in India and relevant blasting parameters were recorded. Proposed flyrock equation is as follows:
where q I is linear charge concentration, q is specific charge, σ c is unconfined compressive strength, ST is stemming length, B is burden, and RQD is rock quality designation. R 2 of 0.815 was obtained for their developed model.
Apart from the empirical methods, prediction of flyrock using artificial intelligent methods has been reported by many researchers. Monjezi et al. (2011b) predicted 192 datasets of flyrock induced by basting operations by using ANN. From their study, it was found that the ANN technique can predict flyrock with high degree of accuracy. Rezaei et al. (2011) used FIS model to predict flyrock and compared the FIS results with conventional statistical approaches. They clearly found that the efficiency of the developed FIS model is much better than that of statistical models. Ghasemi et al. (2012b) predicted flyrock distance using two predictive models namely ANN and FIS models. They indicated that both models are able to predict flyrock distance in which the FIS model yields higher performance in comparison to the ANN approach. Neuro-genetic predictive model was utilized to predict flyrock and back-break by Monjezi et al. (2012). They compared the proposed model with the regression analysis and concluded that the proposed model is a better tool in prediction of flyrock. Amini et al. (2012) presented two intelligent approaches namely SVM and ANN to estimate flyrock distance. They used hole diameter, hole length, burden, spacing, stemming, powder factor, and specific drilling as inputs. After comparison, it was found that the SVM method is more precise than ANN technique. In the other study of flyrock prediction, Khandelwal and Monjezi (2013) used SVM and MLR techniques to estimate flyrock of Soungun Copper Mine, Iran. After comparison of these methods, they introduced SVM as a better option for close flyrock prediction. Table 1 shows some recent studies with their performances in predicting PPV, AOp, and flyrock induced by blasting.
Artificial neural network
The ANN is a soft computation technique inspired by the human brain information process. A typical ANN consists of three main constituents, namely learning rule, network architecture, and transfer function (Simpson 1990). There are two major types of ANN: recurrent and feed-forward. Shahin et al. (2002) recommend that if there is no time-dependent parameter in the ANN, the feed-forward (FF)-ANN can be employed. The multilayer perceptron (MLP) neural network is one of the most well-known FF-ANNs (Haykin 1999; Rezaei et al. 2012; Monjezi et al. 2013b). MLP consists of a number of nodes or neurons in three layers (input, hidden, and output) linked to each other by weights. Du et al. (2002) and Kalinli et al. (2011) reported on the high efficiency of MLP-ANNs in approximating various functions in high-dimensional spaces. Nevertheless, the ANN needs to be trained before interpreting the results. Among many kinds of learning algorithms to train MLP-FF, the back-propagation (BP) algorithm is the most extensively utilized (Dreyfus 2005). In a BP-ANN, the imported data in the input layer starts to propagate to hidden neurons through connection weights (Kuo et al. 2010). The input from each neuron in the previous layer, I i , is multiplied by an adjustable connection or weight, W ij . At each node, the sum of the weighted input signals is computed and then, this value is added to a threshold value known as the bias value, B ij (see Eq. 6). To create the output of the neuron, the combined input, J i , is passed through a nonlinear transfer function f (J j ), such as a sigmoidal function (see Eq. 7). However, in general, the output of each neuron provides the input to the next layer neuron. This procedure is continued until the output is generated. To achieve the error, the created output is checked against the desired output. The BP training can change the weights between the neurons iteratively in a way that minimizes the root mean square error (RMSE) of the system. More details of the BP algorithm can be seen in the classic artificial intelligence books (Fausett 1994).
Adaptive neuro-fuzzy inference system
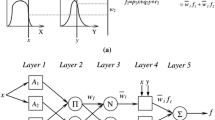
ANFIS developed based on the Takagi and Sugeno (1985) FIS by Jang (1993). ANFIS is considered as a universal predictor which is able to approximate real continuous functions Jang et al. (1997). In fact, ANFIS integrates the principles of ANN and FIS and, therefore, potentially presents all benefits of them in a unique framework. By determining the optimum distribution of membership functions, ANFIS is able to analyze the relationships between the input and target data using the hybrid learning. As in Fig. 1a, ANFIS structure consists of premise and consequent parts. The equivalent architecture of ANFIS including five layers is shown in Fig. 1b. Regarding the applicability of ANFIS in prediction of the nonlinear relationship between input and output data, it has been widely used in various applications of engineering.

a Sugeno fuzzy model with two rules; b equivalent ANFIS architecture (Jang et al. 1997)
In order to describe the procedure of ANFIS, it is assumed that the FIS under consideration consists of two inputs (x, y) and one output (f) and the rule base includes two fuzzy rule set “if-then” as follows (Jang 1993):
-
Rule I
If x is A1 and y is B1, then f 1 = p 1 x + q 1 y + r 1
-
Rule II
If x is A2 and y is B2, then f 2 = p 2 x + q 2 y + r 2
in which p i , q i , and r i are the consequent parameters to be settled. According to Jang (1993) and Jang et al. (1997), an ANFIS with five layers and two rules can be described as follows:
-
Layer I
Every node i in layer I produces a membership grade of a linguistic label. For example, the node function of the ith node is
$$ {Q}_i^1={\mu}_{Ai}(x)=\frac{1}{1+{\left[{\left(\frac{x-{v}_i}{\sigma_1}\right)}^2\right]}^{b_i}} $$(8)in which Q 1 i and x are the membership function and input to node i, respectively. Ai is the linguistic label related to node i, and σ 1, v i , b i are parameters that make changes in the shape of the membership function. The existing parameters in this layer are related to the premise part (see Fig. 1a).
-
Layer II
Each node in layer II computes the firing strength of each rule via multiplication:
$$ \begin{array}{cc}\hfill {Q}_i^2={w}_i={\mu}_{Ai}(x).{\mu}_{Bi}(y)\hfill & \hfill i=1,\ 2\hfill \end{array} $$(9) -
Layer III
The ratio of firing strength of the ith rule to the sum of firing strengths of all rules is calculated in this layer.
$$ \begin{array}{cc}\hfill {Q}_i^3={W}_i=\frac{w_i}{{\displaystyle {\sum}_{j=1}^2}{w}_j}\hfill & \hfill i=1,\ 2\hfill \end{array} $$(10) -
Layer IV
Every node i in layer IV is a node function whereas W i is the output of layer III. Parameters of this layer are related to consequent part.
$$ {Q}_i^4={W}_i{f}_i={W}_i\left({p}_ix+{q}_iy+{r}_i\right) $$(11) -
Layer V
The incoming signals are summed in this layer and form the overall output.
$$ {Q}_i^5=\mathrm{Overall}\kern0.5em \mathrm{output}={\displaystyle \sum }{W}_i{f}_i=\frac{{\displaystyle \sum }{w}_i{f}_i}{{\displaystyle \sum }{w}_i} $$(12)
Site description and data collection
To provide a sufficient number of datasets for prediction of blasting environmental impacts, four granite quarry sites were studied in Johor area, Malaysia. Table 2 shows the descriptions of these sites. The purpose of blasting operation in these quarries is to produce aggregate with capacity of 160,000 to 380,000 t per month. Depending on the weather conditions, 6 to 12 blasting operations are carried out per month in these quarries.
The minimum bench height of 10 m was investigated in Kulai quarry whereas maximum bench height (28 m) was observed is Bukit Indah quarry. A range of rock mass weathering zones from moderately weathered (MW) to completely weathered (CW) was identified in Taman Bestari, Senai Jaya, Kulai and Bukit Indah quarries (Alavi Nezhad Khalil Abad et al. 2014). In addition to mentioned weathered zones, residual soil (RS) was investigated only in Bukit Indah quarry. In identification of weathering zones, suggested method proposed by International Society of Rock Mechanics (ISRM 2007) was utilized. Schmidt hammer test was also conducted based on ISRM (2007) in order to estimate rock mass strength. Range of Schmidt hammer rebound values (Rn) was obtained between 19 and 37. Furthermore, values of 40.7 and 99.8 were obtained as minimum and maximum of uniaxial compressive strength (UCS), respectively. It should be noted that the uniaxial compression tests were conducted on limited block samples collected from the quarries. As a jointing degree or fracturing of the rock mass, RQD can be used to represent the geological discontinuities. RQD is measured as a percentage of the drill core in lengths of 100 mm or more. This parameter was measured in the selected blasting operations. Minimum and maximum values of 22.5 and 61.25, respectively, were achieved for RQD results.
A total number of 166 blasting operations were investigated, and related parameters of blasting were measured. Various blasting parameters including spacing, burden, stemming length, maximum charge per delay, powder factor, and distance from the blast-face were recorded. It should be mentioned that hole diameter of 115 mm was used for all blasting operations. ANFO and dynamite are used as the main explosive material and initiation, respectively. The blastholes are stemmed using fine gravels.
In each blasting, PPV and AOp values were recorded using VibraZEB seismograph with transducers for PPV and AOp measurement. The AOp values were monitored using linear L-type microphones connected to the AOp channels of recording units. The VibraZEB records AOp values ranging from 88 dB (7.25 × 10−5 psi or 0.5 Pa) to 148 dB (0.0725 psi or 500 Pa). The microphones have an operating frequency response from 2 to 250 Hz, which is adequate to measure AOp accurately in the frequency range critical for structures and human hearing. The distance between the monitoring point and the center of blast-face ranged from 65 to 710 m. To measure the flyrock distances in quarry sites, the surface of benches were colored and two video cameras were placed to monitor the flyrock projections. After each blasting, the relevant videos were reviewed to find the locations of the maximum flied rocks. According to Table 1, the widely used input parameters in predicting PPV and AOp are maximum charge per delay and distance from the blast-face. In addition, according to Siskind et al. (1980), the most effective parameters on PPV and AOp are maximum charge per delay and distance from blast-face. In the case of flyrock, the extensively utilized input parameters are burden, spacing, stemming length, powder factor, and maximum charge per delay (see Table 1). Moreover, several researchers obtained these parameters as the most influential one on flyrock resulting from blasting (e.g., Monjezi et al. 2010b, 2011b, 2013b; Rezaei et al. 2011). Therefore, in this study, maximum charge per delay and distance from the blast-face were used as model inputs for prediction of PPV and AOp, while burden to spacing ratio (having effects of both burden and spacing), stemming length, powder factor, and maximum charge per delay were set as input parameters in predicting flyrock distance. Summary of the measured data is tabulated in Table 3. Figures 2, 3, and 4 illustrate the frequency distributions of PPV, AOp, and flyrock distance used in this study.

Frequency distribution of measured PPV values

Frequency distribution of measured AOp values

Frequency distribution of measured flyrock distances
Application of intelligent systems in predicting PPV, AOP, and flyrock
To predict PPV, AOp, and flyrock induced by quarry blasting, two intelligent systems namely ANN and ANFIS were developed. As mentioned earlier, maximum charge per delay and distance from the blast-face were selected as inputs to predict PPV and AOp, while maximum charge per delay, distance from the blast-face, burden to spacing ratio, and stemming length were set as input parameters for flyrock prediction. The modeling procedures of the ANN and ANFIS techniques are described in the following sections.
Prediction of PPV, AOp, and flyrock using ANN
An attempt was made to predict PPV, AOp, and flyrock using ANN technique. To do this, all data were normalized in the range of (0,1) using the following equation:
where X is the measured value, Xnorm represents the normalized value of the measured parameter, and Xmin and Xmax are the minimum and maximum values of the measured parameters in the dataset. The performance of the ANN models depends strongly on the suggested architecture of the network as mentioned in the studies by Hush (1989) and Kanellopoulas and Wilkinson (1997). Therefore, determination of the optimal architecture is required to design an ANN model. The network architecture is defined as the number of hidden layer(s) and the number of nodes in each hidden layer(s). According to various researchers (e.g., Hecht-Nielsen 1987; Hornik et al. 1989; Baheer 2000), one hidden layer can solve any complex function in a network. Hence, in this study, one hidden layer was selected to construct the ANN models. In addition, determining neuron number(s) in the hidden layer is the most critical task in the ANN architecture as stated by Sonmez et al. (2006) and Sonmez and Gokceoglu (2008). Table 4 tabulates some equations related to determination of number of neuron proposed by several scholars. Based on this table, the number of hidden neuron in the range of 1 to 5 should be used for PPV and AOp prediction (using two inputs and one output), while this range is between 1 and 9 for flyrock prediction (using four inputs and one output).
In this study, all datasets were divided randomly to training and testing datasets. The idea behind using some data for testing is to check the performance capacity of the developed model. In the studies by Swingler (1996) and Looney (1996), testing dataset was recommended as 20 and 25 % of whole dataset, respectively, while a range of 20 to 30 % of whole data was suggested for testing in the study by Nelson and Illingworth (1990). Considering these recommendations, 20 % (33 datasets) of whole datasets (166 datasets) was selected randomly as testing datasets, whereas the remaining 133 datasets were used for training the system. In order to determine the optimum number of neurons in the hidden layer, several ANN models were constructed using one hidden layer and mentioned number of hidden neurons for prediction of PPV, AOp, and flyrock as presented in Table 5. In this table, five iterations were modeled for each hidden node in all outputs and average results of these iterations were presented. According to average results, considering R 2 value of both training and testing datasets, model nos. 5, 4, and 6 outperform the other ANN models for prediction of PPV, AOp, and flyrock, respectively. Hence, in construction of ANN models, values of 5, 4, and 6 were selected as number of hidden neurons to predict PPV, AOp, and flyrock.
In the next step of ANN modeling, five different datasets were selected to develop ANN models for prediction of PPV, AOp, and flyrock. A visual basic code was written to choose the random datasets through the randomizer function (Zorlu et al. 2008). Using the suggested ANN structure for each output and five different randomly selected datasets, totally 15 ANN models were constructed for all outputs (see Tables 6, 7, and 8). The testing datasets were also simulated for each train as shown in these tables. It should be noted that in constructing ANN models in this study, using trial-and-error procedure and recommended values in different studies (Yagiz et al. 2009; Jahed Armaghani et al. 2014), the learning rate and momentum coefficient were considered as 0.1 and 0.9, respectively.
Prediction of PPV, AOp, and flyrock using ANFIS
To develop a predictive ANFIS model in predicting environmental impacts of blasting, 166 quarry blasting operations were investigated results of these operations were used. In ANFIS analyses, similar to ANN modeling, the best architecture should be determined. To this aim, using a trial-and-error procedure, several ANFIS models were built to determine the number of fuzzy rules in predicting PPV, AOp, and flyrock separately. The Gaussian membership function, as a well-known membership function in fuzzy systems, was employed in the modeling (Jahed Armaghani et al. 2014). Eventually, each input parameter with seven fuzzy rules outperforms the other ANFIS models in predicting PPV and AOp, while the value of 3 was obtained for prediction of flyrock. Therefore, a number of 49 fuzzy rules (7 × 7) show the best performance for PPV and AOp prediction and 81 fuzzy rules (3 × 3 × 3 × 3) indicate the best performance for flyrock prediction. In determining the number of fuzzy rules, the results of RMSE were only considered. The linguistic variables were set as very very low (VVL), very low (VL), low (L), medium (M), high (H), very high (VH), and very very high (VVH) in modeling PPV and AOp, while these linguistic variables were assigned as L, M, and H for flyrock prediction.
In the next step, considering the suggested ANFIS structure, using the same selected datasets in ANN modeling, 15 ANFIS models were constructed for all output as shown in Tables 6, 7, and 8. In addition, these models were checked using the data assigned for testing datasets. Figures 5, 6, and 7 show the normalized membership functions of input parameters for prediction of PPV, AOp, and flyrock, respectively. The presented membership functions were assigned after training the system. Furthermore, for the output, a linear type of membership function was utilized. It is worth noting that the RMSE results were not decreased after epoch numbers of 10, 14, and 45 for best models of PPV, AOp, and flyrock, respectively. In this study, all ANN and ANFIS models were constructed using Matlab version 7.14.0.739 (Demuth et al. 2009).

Membership functions assigned for the input parameters of PPV: a maximum charge per delay and b distance

Membership functions assigned for the input parameters of AOp: a maximum charge per delay and b distance

Membership functions assigned for the input parameters of flyrock: a burden to spacing ratio, b stemming, c powder factor, and d maximum charge per delay
Analysis of the results
In this research, two nonlinear techniques namely ANN and ANFIS were developed to predict environmental impacts of quarry blasting including PPV, AOp, and flyrock distance. During the modeling process of this study, all 166 datasets were randomly divided to five different datasets (training and testing) for development of intelligent models. Some performance indices including R 2, amount of value account for (VAF), and RMSE were computed to check the capacity performance of all predictive models:
where y, y′, and ỹ are the measured, predicted, and mean of the y values, respectively, N is the total number of data, and P is the number of predictors. Theoretically, the model will be excellent if the VAF is 100 and RMSE is zero. Results of models performance indices (R 2, RMSE, and VAF) for all randomly selected datasets based on training and testing are presented in Tables 6, 7, and 8 in predicting PPV, AOp, and flyrock, respectively. High performances of the training dataset indicate that the learning step of the models is successful if the testing dataset reveals that the model generalization ability is satisfactory. As it can be seen in Tables 6, 7, and 8, selecting the best models is too difficult. To overcome this difficulty, a simple ranking procedure suggested by Zorlu et al. (2008) was used to select the best models. A ranking value was calculated and assigned for each training and testing dataset separately (see Tables 6, 7, and 8). Each performance index was ordered in its class and highest rating was assigned to the best result. For instance, in the case of PPV (see Table 6), R 2 values of the train datasets for ANN technique were obtained as 0.806, 0.785, 0.790, 0.779, and 0.762, respectively. Therefore, their ratings were assigned as 5, 3, 4, 2, and 1, respectively. This procedure was repeated for all performance indices. After this process, the obtained ratings for each dataset (training and testing) were summed, separately. For example, for prediction of PPV (see Table 6), the rating values of ANN training dataset 1 were 5 for R 2, 5 for RMSE, and 5 for VAF, so the performance rating was computed as 15. The final stage of selecting the best models is to calculate the total rank by summing up the rank value of each dataset (training and testing). Total ranking of training and testing datasets for two intelligent systems in predicting blasting environmental impacts is shown in Table 9. According to this table, model nos. 2 and 3 exhibited the best performance of PPV prediction for ANN and ANFIS techniques, respectively, while model nos. 5 and 2 yielded the best results of ANN and ANFIS, respectively, in predicting AOp. In addition, the best ANN and ANFIS models for prediction of flyrock distance are model nos. 3 and 1, respectively. Based on the presented results, considering both training and testing datasets, the prediction performances of the ANFIS models are higher than the ANN models.
The graphs of predicted PPV, AOp, and flyrock using the ANN and ANFIS techniques against their measured values for training and testing datasets are shown in Figs. 8, 9, and 10, respectively. As shown in these figures, the ANFIS model can perform better in the prediction of blasting environmental impacts in comparison to ANN predictive models. In these figures, R 2 values of testing datastets equal to 0.939, 0.947, and 0.959 for prediction of PPV, AOp, and flyrock, respectively, suggest the superiority of the ANFIS technique in predicting blasting environmental impacts, while implementing ANN model, these values are 0.771, 0.864, and 0.834 in predicting PPV, AOp, and flyrock, respectively.

Correlation between normalized measured and predicted values of PPV using ANN and ANFIS techniques

Correlation between normalized measured and predicted values of AOp using ANN and ANFIS techniques

Correlation between normalized measured and predicted values of flyrock distance using ANN and ANFIS techniques
Summary and conclusion
Two intelligent systems (ANN and ANFIS) were developed to predict blasting environmental impacts using 166 datasets obtained from four granite quarry sites in Malaysia. For this purpose, the blasting parameters such as burden, spacing, stemming, powder factor, and maximum charge per delay, as well as environmental impacts including PPV, AOp, and flyrock were precisely recorded in each blasting event. Several ANN and ANFIS models were constructed to predict environmental impacts of quarry blasting. In this study, based on previous researches, maximum charge per delay and distance from the blast-face were used as inputs for prediction of PPV and AOp, while burden to spacing ratio, stemming length, powder factor, and maximum charge per delay were set as input parameters in predicting flyrock distance. Considering some model performance indices including R 2, RMSE, and VAF and also using simple ranking method, the best ANN and ANFIS models were selected among all constructed models. The results indicated that the ANFIS technique can provide higher performance capacity in predicting blasting environmental impacts compared to ANN model. R 2 values of testing datastets equal to 0.939, 0.947, and 0.959 for prediction of PPV, AOp, and flyrock, respectively, suggest the higher performance capacity of the ANFIS technique in predicting blasting environmental impacts, while in predicting PPV, AOp, and flyrock performing ANN approach, these values are 0.771, 0.864, and 0.834, respectively. Although all proposed models in this study are applicable for prediction of blasting environmental impacts, they can be used depending on the condition. When higher accuracy is required, the ANFIS model would be the proper alternative as it combines the advantages of the ANN and FIS techniques to demonstrate a high prediction capacity in nonlinear engineering problems.
References
Alavi Nezhad Khalil Abad SV, Mohamad ET, Komoo I, Kalatehjari R (2014) A typical weathering profile of granitic rock in Johor, Malaysia based on joint characterization. Arab J Geosci. doi:10.1007/s12517-014-1345-7
Amini H, Gholami R, Monjezi M, Torabi SR, Zadhesh J (2012) Evaluation of flyrock phenomenon due to blasting operation by support vector machine. Neural Comput Applic 21(8):2077–2085
Baheer I (2000) Selection of methodology for modeling hysteresis behavior of soils using neural networks. J Comput Aided Civ Infrastruct Eng 5(6):445–463
Bajpayee TS, Rehak TR, Mowrey GL, Ingram DK (2004) Blasting injuries in surface mining with emphasis on flyrock and blast area security. J Saf Res 35(1):47–57
Bakhshandeh Amnieh H, Mozdianfard MR, Siamaki A (2010) Predicting of blasting vibrations in Sarcheshmeh copper mine by neural network. Saf Sci 48(3):319–325
Bakhshandeh Amnieh H, Siamaki A, Soltani S (2012) Design of blasting pattern in proportion to the peak particle velocity (PPV): Artificial neural networks approach. Saf Sci 50:1913–1916
Bhandari S (1997) Engineering rock blasting operations. Taylor & Francis, Boca Raton
Bureau of Indian Standard (1973) Criteria for safety and design of structures subjected to underground blast. ISI Bull IS-6922
Davies B, Farmer IW, Attewell PB (1964) Ground vibrations from shallow sub-surface blasts. The Engineer, London, pp 553–559
Demuth H, Beale M, Hagan M (2009) MATLAB Version 7.14.0.739; Neural Network Toolbox for Use with Matlab. The Mathworks
Douglas E (1989) An investigation of blasting criteria for structural and ground vibrations. Master’s Thesis: Ohio University
Dreyfus G (2005) Neural Networks: methodology and application. Springer Berlin, Heidelberg
Du KL, Lai AKY, Cheng KKM, Swamy MNS (2002) Neural methods for antenna array signal processing: a review. Signal Process 82:547–561
Duvall WI, Petkof B (1959) Spherical propagation of explosion of generated strain pulses in rocks. USBM, RI-5483
Ebrahimi E, Monjezi M, Khalesi MR, Jahed Armaghani D (2015) Prediction and optimization of back-break and rock fragmentation using an artificial neural network and a bee colony algorithm. Bull Eng Geol Environ. doi:10.1007/s10064-015-0720-2
Fausett LV (1994) Fundamentals of neural networks: architecture, algorithms and applications. Englewood Cliffs, Prentice-Hall
Fisne A, Kuzu C, Hüdaverdi T (2011) Prediction of environmental impacts of quarry blasting operation using fuzzy logic. Environ Monit Assess 174:461–470
Ghasemi E, Sari M, Ataei M (2012a) Development of an empirical model for predicting the effects of controllable blasting parameters on flyrock distance in surface mines. Int J Rock Mech Min Sci 52:163–170
Ghasemi E, Amini H, Ataei M, Khalokakaei R (2012b) Application of artificial intelligence techniques for predicting the flyrock distance caused by blasting operation. Arab J Geosci. doi:10.1007/s12517-012-0703-6
Ghasemi E, Ataei M, Hashemolhosseini H (2013) Development of a fuzzy model for predicting ground vibration caused by rock blasting in surface mining. J Vib Control 19(5):755–770
Ghoraba S, Monjezi M, Talebi N, Moghadam MR, Jahed Armaghani D (2015) Prediction of ground vibration caused by blasting operations through a neural network approach: a case study of Gol-E-Gohar Iron Mine, Iran. J Zhejiang Univ Sci A. doi:10.1631/jzus.A1400252
Ghosh A, Daemen JK (1983) A simple new blast vibration predictor. In: Proceedings of the 24th US symposium on rock mechanics, College Station, Texas; pp. 151–161
Gupta RN (1990) Surface blasting and its impact on environment. In: Trivedy NJ, Singh BP (eds) Impact of mining on environment. Ashish Publishing House, New Delhi, pp 23–24
Hajihassani M, Jahed Armaghani D, Marto A, Tonnizam Mohamad E (2014a) Ground vibration prediction in quarry blasting through an artificial neural network optimized by imperialist competitive algorithm. Bull Eng Geol Environ. doi:10.1007/s10064-014-0657-x
Hajihassani M, Jahed Armaghani D, Sohaei H, Tonnizam Mohamad E, Marto A (2014b) Prediction of airblast-overpressure induced by blasting using a hybrid artificial neural network and particle swarm optimization. Appl Acoust 80:57–67
Haykin S (1999) Neural Networks: 2nd ed. Englewood Cliffs, Prentice-Hall
Hecht-Nielsen R (1987) Kolmogorov’s mapping neural network existence theorem. In: Proceedings of the First IEEE International Conference on Neural Networks, San Diego, CA, USA, pp. 11–14
Hemphill GB (1981) Blasting operations. McGraw-Hill, New York
Hornik K, Stinchcombe M, White H (1989) Multilayer feedforward networks are universal Approximators. Neural Netw 2:359–366
Hush DR (1989) Classification with neural networks: a performance analysis. In: Proceedings of the IEEE International Conference on Systems Engineering. Dayton, OH, USA, pp. 277–280
Iphar M, Yavuz M, Ak H (2008) Prediction of ground vibrations resulting from the blasting operations in an open-pit mine by adaptive neuro-fuzzy inference system. Environ Geol 56:97–107
ISRM (2007) In: Ulusay and Hudson (eds) The complete ISRM suggested methods for rock characterization, testing and monitoring: 1974–2006. Suggested methods prepared by the commission on testing methods, International Society for Rock Mechanics
Jahed Armaghani D, Hajihassani M, Mohamad ET, Marto A, Noorani SA (2013) Blasting-induced flyrock and ground vibration prediction through an expert artificial neural network based on particle swarm optimization. Arab J Geosci. doi:10.1007/s12517-013-1174-0
Jahed Armaghani D, Tonnizam Mohamad E, Momeni E, Narayanasamy MS, Mohd Amin MF (2014) An adaptive neuro-fuzzy inference system for predicting unconfined compressive strength and Young’s modulus: a study on Main Range granite. Bull Eng Geol Environ. doi:10.1007/s10064-014-0687-4
Jang RJS (1993) Anfis: adaptive-network-based fuzzy inference system. IEEE Trans Syst Man Cybern 23:665–685
Jang RJS, Sun CT, Mizutani E (1997) Neuro-fuzzy and soft computing. Prentice-Hall, Upper Saddle River, p 614
Kaastra I, Boyd M (1996) Designing a neural network for forecasting financial and economic time series. Neurocomputing 10:215–236
Kalinli A, Acar MC, Gunduz Z (2011) New approaches to determine the ultimate bearing capacity of shallow foundations based on artificial neural networks and ant colony optimization. Eng Geol 117:29–38
Kanellopoulas I, Wilkinson GG (1997) Strategies and best practice for neural network image classification. Int J Remote Sens 18:711–725
Kecojevic V, Radomsky M (2005) Flyrock phenomena and area security in blasting-related accidents. Saf Sci 43(9):739–750
Khandelwal M, Kankar PK (2011) Prediction of blast-induced air overpressure using support vector machine. Arab J Geosci 4:427–433
Khandelwal M, Monjezi M (2013) Prediction of flyrock in open pit blasting operation using machine learning method. Int J Min Sci Technol 23(3):313–316
Khandelwal M, Singh TN (2005) Prediction of blast induced air overpressure in opencast mine. Noise Vib Control Worldw 36:7–16
Khandelwal M, Singh TN (2006) Prediction of blast induced ground vibrations and frequency in opencast mine-a neural network approach. J Sound Vib 289:711–725
Khandelwal M, Singh TN (2009) Prediction of blast-induced ground vibration using artificial neural network. Int J Rock Mech Min Sci 46:1214–1222
Khandelwal M, Kumar DL, Yellishetty M (2011) Application of soft computing to predict blast-induced ground vibration. Eng Comput 27(2):117–125
Konya CJ, Walter EJ (1990) Surface blast design. Prentice Hall, Englewood Cliffs
Kuo RJ, Wang YC, Tien FC (2010) Integration of artificial neural network and MADA methods for green supplier selection. J Clean Prod 18(12):1161–1170
Kuzu C, Fisne A, Ercelebi SG (2009) Operational and geological parameters in the assessing blast induced airblast-overpressure in quarries. Appl Acoust 70:404–411
Langefors U, Kihlstrom B (1963) The modern technique of rock blasting. Wiley, New York
Li DT, Yan JL, Zhang L (2012) Prediction of Blast-Induced Ground Vibration Using Support Vector Machine by Tunnel Excavation. Appl Mech Mater 170:1414–1418
Looney CG (1996) Advances in feed-forward neural networks: demystifying knowledge acquiring black boxes. IEEE Trans Knowl Data Eng 8(2):211–226
Lundborg N, Persson A, Ladegaard-Pedersen A, Holmberg R (1975) Keeping the lid on flyrock in open-pit blasting. Eng Min J 176:95–100
Marto A, Hajihassani M, Jahed Armaghani D, Tonnizam Mohamad E, Makhtar AM (2014) A novel approach for blast-induced flyrock prediction based on imperialist competitive algorithm and artificial neural network. Sci World J. Article ID 643715
Masters T (1994) Practical neural network recipes in C++. Academic Press, Boston
Mohamadnejad M, Gholami R, Ataei M (2012) Comparison of intelligence science techniques and empirical methods for prediction of blasting vibrations. Tunn Undergr Space Technol 28:238–244
Mohamed MT (2011) Performance of fuzzy logic and artificial neural network in prediction of ground and air vibrations. Int J Rock Mech Min Sci 48(5):845–851
Monjezi M, Dehghani H (2008) Evaluation of effect of blasting pattern parameters on back break using neural networks. Int J Rock Mech Min Sci 45:1446–1453
Monjezi M, Ahmadi M, Sheikhan A, Bahrami M, Salimi AR (2010a) Predicting blast-induced ground vibration using various types of neural networks. Soil Dyn Earthq Eng 30:1233–1236
Monjezi M, Bahrami A, Yazdian Varjani A (2010b) Simultaneous prediction of fragmentation and flyrock in blasting operation using artificial neural networks. Int J Rock Mech Min Sci 47:476–480
Monjezi M, Bahrami A, Yazdian Varjani A, Sayadi AR (2011a) Prediction and controlling of flyrock in blasting operation using artificial neural network. Arab J Geosci 4:421–425
Monjezi M, Ghafurikalajahi M, Bahrami A (2011b) Prediction of blast-induced ground vibration using artificial neural networks. Tunn Undergr Space Technol 26(1):46–50
Monjezi M, Amini Khoshalan H, Yazdian Varjani A (2012) Prediction of flyrock and backbreak in open pit blasting operation: a neurogenetic approach. Arab J Geosci 5(3):441–448
Monjezi M, Hasanipanah M, Khandelwal M (2013a) Evaluation and prediction of blast-induced ground vibration at Shur River Dam, Iran, by artificial neural network. Neural Comput Applic 22:1637–1643
Monjezi M, Mehrdanesh A, Malek A, Khandelwal M (2013b) Evaluation of effect of blast design parameters on flyrock using artificial neural networks. Neural Comput Applic 23:349–356
Morhard RC (ed) (1987) Explosives and rock blasting. Atlas Powder Company
Nelson M, Illingworth WT (1990) A practical guide to neural nets. Addison-Wesley, Reading
Paola JD (1994) Neural network classification of multispectral imagery. MSc thesis, The University of Arizona, USA
Raina AK, Murthy VMSR, Soni AK (2014) Flyrock in bench blasting: a comprehensive review. Bull Eng Geol Environ. doi:10.1007/s10064-014-0588-6
Rezaei M, Monjezi M, Yazdian Varjani A (2011) Development of a fuzzy model to predict flyrock in surface mining. Saf Sci 49:298–305
Rezaei M, Monjezi M, Moghaddam SG, Farzaneh F (2012) Burden prediction in blasting operation using rock geomechanical properties. Arab J Geosci 5:1031–1037
Ripley BD (1993) Statistical aspects of neural networks. In: Barndoff- Neilsen OE, Jensen JL, Kendall WS (eds) Networks and chaos-statistical and probabilistic aspects. Chapman & Hall, London, pp 40–123
Rodriguez R, Toraño J, Menindez M (2007) Prediction of the airblast wave effects near a tunnel advanced by drilling and blasting. Tunn Undergr Space Technol 22:241–251
Rodriguez R, Lombardia C, Torno S (2010) Prediction of the air wave due to blasting inside tunnels: approximation to a ‘phonometric curve’. Tunn Undergr Space Technol 25:483–489
Roy PP (1993) Putting ground vibration predictors into practice. Colliery Guardian 241:63–67
Roy PP (2005) Rock blasting effects and operations. Taylor & Francis, Boca Raton
Saadat M, Khandelwal M, Monjezi M (2014) An ANN-based approach to predict blast-induced ground vibration of Gol-E-Gohar iron ore mine, Iran. J Rock Mech Geotech Eng 6:67–76
Segarra P, Domingo JF, Lopez LM, Sanchidrian JA, Ortega MF (2010) Prediction of near field overpressure from quarry blasting. Appl Acoust 71:1169–1176
Shahin MA, Maier HR, Jaksa MB (2002) Predicting settlement of shallow foundations using neural networks. J Geotech Geoenviron Eng 128(9):785–793
Simpson PK (1990) Artificial neural system: foundation, paradigms, applications and implementations. Pergamon, New York
Singh TN, Singh V (2005) An intelligent approach to prediction and control ground vibration in mines. Geotech Geolog Eng 23:249–262
Siskind DE, Stachura VJ, Stagg MS, Koop JW (1980) In: Siskind DE, editor. Structure response and damage produced by airblast from surface mining. United States Bureau of Mines
Sonmez H, Gokceoglu C (2008) Discussion on the paper by H. Gullu and E. Ercelebi “A neural network approach for attenuation relationships: An application using strong ground motion data from Turkey. Eng Geol 97:91–93
Sonmez H, Gokceoglu C, Nefeslioglu HA, Kayabasi A (2006) Estimation of rock modulus: for intact rocks with an artificial neural network and for rock masses with a new empirical equation. Int J Rock Mech Min Sci 43:224–235
Swingler K (1996) Applying neural networks: a practical guide. Academic Press, New York
Takagi T, Sugeno M (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Trans Syst Man Cybern 15:116–132
Tonnizam Mohamad E, Hajihassani M, Jahed Armaghani D, Marto A (2012) Simulation of Blasting-Induced Air Overpressure by Means of Artificial Neural Networks. Int Rev Model Simul 5(6):2501–2506
Tonnizam Mohamad E, Jahed Armaghani D, Hajihassani M, Faizi K, Marto A (2013) A Simulation Approach to Predict Blasting-Induced Flyrock and Size of Thrown Rocks. Electron J Geotech Eng 18:365–374
Trivedi R, Singh TN, Raina AK (2014) Prediction of blast-induced flyrock in Indian limestone mines using neural networks. J Rock Mech Geotech Eng 6(5):447–454
Wang C (1994) A theory of generalization in learning machines with neural application. PhD thesis, The University of Pennsylvania, USA
Wiss JF, Linehan PW (1978) Control of vibration and air noise from surface coal Mines-III. US Bureau of Mines Report OFR 103(3)-79, p. 623
Yagiz S, Gokceoglu C, Sezer E, Iplikci S (2009) Application of two non-linear prediction tools to the estimation of tunnel boring machine performance. Eng Appl Artif Intell 22(4):808–814
Zorlu K, Gokceoglu C, Ocakoglu F, Nefeslioglu HA, Acikalin S (2008) Prediction of uniaxial compressive strength of sandstones using petrography-based models. Eng Geol 96(3):141–158
Acknowledgments
The authors would like to extend their appreciation to the Universiti Teknologi Malaysia for UTM Research University Grant No. 01H88 and provide required facilities that made this research possible.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jahed Armaghani, D., Hajihassani, M., Monjezi, M. et al. Application of two intelligent systems in predicting environmental impacts of quarry blasting. Arab J Geosci 8, 9647–9665 (2015). https://doi.org/10.1007/s12517-015-1908-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12517-015-1908-2