
Abstract
In addition to all benefits of blasting in mining and civil engineering applications, blasting has some undesirable impacts on surrounding areas. Blast-induced air-overpressure (AOp) is one of the most important environmental impacts of blasting operation which may cause severe damage to nearby residents and structures. Hence, it is a major concern to predict and subsequently control the AOp due to blasting. This paper presents an adaptive neuro-fuzzy inference system (ANFIS) model for prediction of blast-induced AOp in quarry blasting sites. For this purpose, 128 blasting operations were monitored in three quarry sites, Malaysia. Several models were constructed to obtain the optimum model in which each model involved five inputs and one output. Values of maximum charge per delay, powder factor, burden to spacing ratio, stemming length, and distance between monitoring station and blast face were set as input parameters to predict AOp. For comparison purposes, considering the same data, AOp values were predicted through the pre-developed artificial neural network (ANN) model and multiple regression (MR) technique. The results demonstrated the superiority of the ANFIS model to predict AOp compared to other methods. Moreover, results of sensitivity analysis indicated that the maximum charge per delay and powder factor and distance from the blast face are the most influential parameters on AOp.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Blasting is the most common technique to excavate and break down of rocks. This technique is frequently used in mining, quarrying and civil engineering applications such as dam or road construction. Rock is blasted into smaller pieces in different mining operations such as quarrying and open pit mining, or into large blocks for some civil engineering applications (Bhandari 1997). While blast-holes are exploded independently, a cylindrical plug of broken ground is produced around each blast-hole. The size of this plug depends on explosive gases pressure and the time for which they act in the radial cracks growing from the blast-hole. The pressure is released by creating the radial cracks and fissures to the free surface and also venting through the stemming.
When explosives are detonated, pressure waves of air-blast are produced and these phenomena continued in a few seconds (Wharton et al. 2000). In each blasting operation, about 20 to 30 % of the produced energy by explosive is utilized for rock crushing and displacement. The rest of the energy produced by explosive is wasted and produces undesirable environmental impacts such as flyrock, air-overpressure (AOp), ground vibration and back-brak (Khandelwal and Singh 2006; Monjezi et al. 2011; Tonnizam Mohamad et al. 2012; Jahed Armaghani et al. 2013; Tonnizam Mohamad et al. 2013; Ghoraba et al. 2015; Ebrahimi et al. 2015; Shirani Faradonbeh et al. 2015). AOp arises from blasting and it may cause damages to nearby residents and surrounding structures (Hopler 1998; Hajihassani et al. 2014).
Several empirical equations have been proposed to predict AOp. According to National Association of Australian State (1983), AOp from confined blast-hole charges can be estimated using the following empirical formula:
in which, P is AOp in kilopascals, E is mass of charge in kilogram, and d is distance from center of blast-hole in meter. McKenzie (1990) recommended an equation to describe the decay of AOp as follows:
in which, dB is decibel reading with a linear of flat weighting, D is distance, and W is the weight of explosive (in kilogram). The cube-root scaled distance factor (SD) is a method to estimate blast-induced AOp. The relationship between SD and two parameters including distance and explosive charge weight per delay is formulated as below:
in which, D is the distance (in meter or feet) and W is the weight of explosive (in kilogram or pound) and SD is the scaled distance factor. The form of the prediction equation of AOp is as follow:
in which, AOp is measured in pascal or dB, SD is the scaled distance factor and H and β are the site factors. This equation is widely used in surface blasting to predict AOp (Hustrulid 1999; Kuzu et al. 2009). The site factor values, H and β, for some blasting conditions are tabulated in Table 1.
Kuzu et al. (2009) established a new empirical relationship between AOp and two parameters including the distance and charge weight. They used 98 AOp recorded from quarry blasting operations under different conditions and demonstrated the proposed equation predicts AOp with reasonable accuracy. Segarra et al. (2010) provided a new AOp prediction equation based on monitoring data in two quarries. They used a data set comprising of 122 AOp records as well as other blasting parameters at distances less than 400 m in 41 blasting works. Based on Eq. 4, effects of two other parameters namely A f (the influence of the azimuth of the measurement point with respect to the bench face) and A s (the effect of the blast initiation) were considered to develop a new equation for AOp prediction. Eventually, the accuracy of 32 % for their proposed model was obtained in predicting AOp. In addition, the proposed model was validated using five new blasting data with 22.6 % accuracy.
Besides, the use of soft computing methods for AOp prediction has been reported in several researches. Khandelwal and Singh (2005) presented an artificial neural network (ANN) approach to predict AOp by using charge per delay and distance from the blast-face. They demonstrated that ANN provides high performance capacity for prediction of AOp. Mohamed (2011) predicted AOp using fuzzy inference system (FIS) and ANN by using two parameters including the distance and charge per delay. They compared the results with the values obtained by regression analysis and observed field data and concluded that the ANN and fuzzy models have accurate prediction compared to regression analysis. Khandelwal and Kankar (2011) predicted AOp due to blasting using 75 datasets obtained from three mines by support vector machine (SVM) method. They compared AOp values predicted by SVM with the results of generalized predictor equation and demonstrated that the SVM method yields more accurate results in comparison to generalized predictor. A new approach was developed by Hajihassani et al. (2014) based on hybrid particle swarm optimization (PSO) and ANN model to predict AOp induced by quarry blasting. The measured AOp values were compared with the results of the empirical formula to evaluate the accuracy of the presented PSO-based ANN model. The results demonstrated that the presented approach is an applicable tool to predict AOp with high degree of accuracy. Table 2 presents some studies with their performances in predicting AOp using soft computing techniques.
In this paper, an adaptive neuro-fuzzy inference system (ANFIS) is developed to predict AOp induced by blasting in quarry sites. For the sake of comparison, AOp values are also predicted by a pre-developed ANN and multiple regression (MR) models.
Theory of blast-induced AOp
The explosion is produced once the pressure reactive gases reach the sonic velocity due to the shock wave of chemical reaction (Baker et al. 1983). The gas pressure velocity is increased quickly when the explosive detonation happens in the blast-hole. Consequently, the gas pressure suddenly loads surrounding rocks which produces a compressive shock pulse and moves rapidly away from the borehole. The pressure in terms of blasting is mainly indicated with shock and gas mechanisms (Roy 2005).
AOp is produced by a large shock wave from explosion point into the free surface. Consequently, the AOp is a shock wave which is refracted horizontally by density variations in the atmosphere. The atmospheric pressure waves of AOp consist of an audible high frequency and sub-audible low-frequency sound. In general, in blasting operations, AOp waves are created from following sources (Wiss and Linehan 1978; Siskind et al. 1980; Morhard 1987).
-
Air pressure pulse which is displacement of the rock at bench face
-
Rock pressure pulse which is induced by ground vibration
-
Gas release pulse which is the escape of gases through rock fractures
-
Stemming release pulse which is the escape of gases from the blasthole when the stemming is ejected
AOp is known in terms of sound which is measured with pascal (Pa) or decibels (dB) (Kuzu et al. 2009). The lower boundary of detectable sound for human ear is 20 Hz and below than that it is unhearable. Hence, it is undeniable that there is a concussion possibility for human with sound more than 20 Hz. In addition, if the AOp waves energy exceed the atmospheric pressure (194 dB, or 65.4 N), the surrounding structures may be affected with some damages. The level of AOp of the possibility of structural damage is 180 dB and windows break is between140 and 170 dB. The allowable limitation of decibel value for AOp is 134 dB (Griffiths et al. 1978; Kuzu et al. 2009). Therefore, it should be attempted to keep the AOp level below 120 dB in blasting operations.
AOp is influenced by several parameters. According to Khandelwal and Kankar (2011), blast geometry, maximum charge per delay, distance and vegetation are the foremost influential parameters of AOp. Furthermore, AOp is influenced by other parameters such as atmospheric conditions, over-charging, weak strata and conditions arise from secondary blasting (Siskind et al. 1980; Dowding 2000; Segarra et al. 2010). However, AOp induced by blasting is not easy to predict as the same blast design can produce different results in different cases.
Data collection and monitoring
A total number of 128 blasting works from three granite quarry sites in Malaysia are investigated and AOp values are monitored in each operation. Table 3 shows the description of the three quarry sites which are placed near to Johor, Malaysia. In these quarries, blast holes of 75 and 89 mm diameter with average length of 19.1 m are vertically drilled. ANFO is utilized as the main explosive material and dynamite is used as initiation. Fine gravels are used as the stemming material. Figures 1 and 2 show the location of the granite sites and a view of Kulai quarry site, respectively.

Location of the investigated sites

A view of Kulai quarry site
Data monitoring is carried out over six month to collect blasting data. The blasting parameters including stemming length, spacing, burden, powder factor, maximum charge per delay and hole depth and diameter are measured during blasting operations. Utilizing the microphones connected to the AOp channels, AOp values are monitored in each blasting operation (see Fig. 3). This instrument records AOp values ranging from 88 dB (7.25 × 10−5 psi or 0.5 Pa) to 148 dB (0.0725 psi or 500 Pa). The distance between monitoring point and the blast-face is ranged between 115 to 680 m in different blasting operations.

AOp monitoring in blasting sites
ANN approach for AOp prediction
ANNs include a series of parallel interconnected processing units named neuron or node. There are some activation functions which transfer the activation signal between neurons. However, performance of an ANN system is significantly related to architecture including number of hidden layer and the neurons in the hidden layer (Dreyfus 2005). In terms of the structure, ANNs are divided into two types; feed-forward and recurrent ANNs. Among these, feed-forward (FF) neural network is the most commonly-used ANN type in a wide range of science and engineering as reported by many researchers (e.g. Haykin 1999; Engelbrecht 2007). Study by Shahin et al. (2002) suggests that this type of ANN can be implemented when there is no time-dependent variable in defining ANNs.
In FF ANN, normally, the nodes are categorized into several layers. Using the connections, a signal moves throughout the input to the output layer(s). Haykin (1999) and Monjezi et al. (2012a) reported that Multi-Layer Perceptron (MLP) neural network is one of the most popular feed-forward ANNs. Typically, MLP ANNs comprise at least three layers known as input, hidden and output layers which are interconnected through connection weights (Veelenturf Leo 1995; Hagan et al. 1996). Compared to other types of ANNs, feed-forward MLP ANN is not complicated to implement (Marto et al. 2014). Du et al. (2002) and Kalinli et al. (2011) reported on the high efficiency of MLP-ANNs in approximating various functions in high-dimensional spaces. MLP has successfully been utilized in numerous field-of-engineering problems (Tonnizam Mohamad et al. 2014). Nevertheless, the ANN needs to be trained before interpreting the results. Back-propagation (BP) algorithm is the most commonly used algorithm to train the system and it can adjust the network weights during learning process (Kosko 1994; Rezaei et al. 2012). Fundamentally, BP learning consists of forward and backward passes in various layers of the network. The input pattern is applied to the neurons and outputs are produced. The error correction is conducted if the outputs of the network are different from the desired values. This action is conducted through the adjustment of weights and biases in which BP algorithm utilized for this purpose (Simpson 1990). At the end, the network error can be calculated using several performance indices, e.g., root mean square error (RMSE) and value account for (VAF). More details of the BP algorithm can be seen in the classic artificial intelligence books (Fausett 1994).
As mentioned earlier, blasting parameters of 128 blasting operations are measured in three quarry sites and AOp values are monitored in each operation. The collected data is used to train and subsequently verify the accuracy of ANN in predicting AOp induced by blasting. According to Siskind et al. (1980), maximum charge per delay and distance from blast-face are the most effective parameters on AOp. In addition, as presented in Table 2, widely used input parameters are maximum charge per delay and distance from blast-face. Apart from that, other blasting parameters such as burden, spacing, stemming, and powder factor are affected in result of AOp (Khandelwal and Kankar 2011; Tonnizam Mohamad et al. 2012; Hajihassani et al. 2014). Therefore, in this study, powder factor (PF), maximum charge per delay (MC), stemming length (ST), burden to spacing ratio (BS), and distance between monitoring station and blast face (D) are selected as network inputs for prediction of AOp. Input and output parameters used in the modeling as well as their statistical information are listed in Table 4.
In this research, all datasets are distributed randomly into two different datasets namely testing and training. To do this, 80 % of the datasets is used to train the system while the rest of 20 % is considered to check the performances of the network. Using the following equation, the datasets are normalized:
where Xnorm is the normalized value of the measured parameter; X is the measured value, Xmax and Xmin are the maximum and minimum values of the measured parameters in the dataset, respectively.
In order to achieve a superior performance of the ANN model, it is necessary to determine the optimum network architecture. Normally, hidden layer numbers and number of neurons in hidden layer can be defined as network architecture. According to Hornik et al. (1989), a network with one hidden layer can be utilized in any continuous function. Hence, one hidden layer is used for ANN modeling of this study. The number of neurons in the hidden layer is the most critical task in the ANN architecture (Sonmez et al. 2006; Sonmez and Gokceoglu 2008). As can be seen in Table 5, several relationships have been proposed for determining the number of neurons in the hidden layer by several researchers. According to this table, for AOp prediction, the number of neurons which might be utilized in the hidden layer varies between 2 and 9. To achieve the optimum number of neurons in the hidden layer, following the trial and error method, several networks with different training and testing datasets are trained and tested. The results of analyses in terms of coefficient of determination (R 2) and RMSE are tabulated in Table 6. According to this table, model number 3 with 4 hidden nodes (iteration 2) indicates higher performances in prediction of AOp among other models and therefore, this model is chosen as the best ANN model. It is worth mentioning that in construction of ANN models, the learning rate and momentum coefficient are set to be 0.05 and 0.9, respectively.
AOp prediction through ANFIS
Adaptive neuro-fuzzy inference system (ANFIS) developed by Jang (1993) based on FIS model. ANFIS is a universal predictor with the capability to approximate any real continuous functions (Jang et al. 1997). ANFIS works based on the construction of a set of if-then fuzzy rules with proper membership functions to produce the required output data. In general, a FIS is generated based on five functioning blocks including: several if-then fuzzy rules, a database to define the membership functions, a decision-making element to conduct the inference operations on the rules, a fuzzification interface to convert the inputs utilizing linguistic values and finally, a defuzzification interface to convert the fuzzy results into an output.
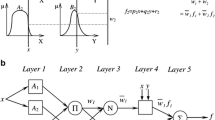
ANFIS integrates the philosophies of artificial neural networks (ANNs) and FIS and therefore, potentially presents all benefits of them in a unique framework. Through the hybrid learning, ANFIS is able to evaluate the relationships between inputs and target data by determining the optimum distribution of membership functions. Sezer et al. (2014) mentioned that a typical ANFIS often is composed of one input layer, one output layer and four hidden layers. It is worth noting that the number of hidden nodes in ANFIS reflects the rule numbers. It should be mentioned that ANFIS implements Takagi and Sugeno’s (1985) type rules (Jang et al. 1997). Generally, the aforementioned type of rules is more flexible in solving complex problems as this point was highlighted by Jin and Jiang (1999). In fact, in contrary to Mamdany fuzzy rules, the consequent part of Takagi and Sugeno fuzzy rules is often a linear function of input variables. Figure 4 shows a basic ANFIS architecture. According to this figure, ANFIS architecture consists of two parts including premise and consequent parts.

a Sugeno fuzzy model with two rules, b equivalent ANFIS architecture (Jang 1993)
To explain the modeling procedure by ANFIS, it is supposed that the FIS under consideration consists of two inputs (x, y) and one output (f) and the rule base includes two fuzzy rule set “if-then” as bellow:
where \( {p}_1 \), \( {p}_2,\kern0.5em {q}_1 \), \( {q}_2,\ {r}_1 \) and \( {r}_2 \) are linear parameters and A1, A2, B1 and B2 are non-linear parameters (see Fig. 4b). According to Jang (1993) and Jang et al. (1997), an ANFIS with five layers and two rules can be explained as follows:
Layer I: Every node i in layer I produces a membership grade of a linguistic label. For example, the node function of the ith node is:
in which \( {Q}_i^1 \) and \( x \) are the membership function and input to node i respectively. Ai is the linguistic label related to node i and \( {\sigma}_1,{v}_i, \) \( {b}_i \) are parameters that make changes in the form of the membership functions. The existing parameters in this layer are related to the premise part, as in Fig. 4a.
Layer II: Each node in layer II computes the firing strength of each rule through multiplication:
Layer III: The ratio of firing strength of the ith rule to the sum of firing strengths of all rule is obtained in this layer.
Layer IV: Every node i in this layer is a node function whereas W t is the output of layer III. Parameters of this layer are related to consequent part.
Layer V: The incoming signals are summed in this layer and form the overall output.
ANFIS as a superior model has been extensively-used in different fields of geotechnical engineering (Grima et al. 2000; Iphar et al. 2008; Yilmaz and Yuksek 2009; Sezer et al. 2014). Grima et al. (2000) utilized this technique to predict penetration rate of tunnel boring machine. Ground vibration resulting from blasting was successfully predicted by ANFIS in the study conducted by Iphar et al. (2008). In addition, Yilmaz and Yuksek (2009) and Jahed Armaghani et al. (2014a) applied ANFIS to predict uniaxial compressive strength (UCS) of the rock samples.
To predict blast-induced AOp, an ANFIS-based model is developed. This model utilized five input parameters which are chosen same as the input parameters in the ANN model, as tabulated in Table 4. All datasets were distributed randomly to training (80 %) and testing (20 %) datasets same as the ANN analysis. In order to determine the optimum number of fuzzy rules, using the trial and error method, several models with different membership function combinations of 2, 3, 4, and 5 are trained and evaluated. Finally, it is found that each input with 3 membership functions yields superior results among other models concerning the root mean squared error (RMSE). Therefore, ANFIS model with total number of 243 fuzzy rules (3 × 3 × 3 × 3 × 3) shows the best performance to predict AOp. To obtain the best performance of the selected ANFIS model, this model is trained and tested utilizing different training and testing datasets and the results are tabulated in Table 7. Considering the results of both training and testing datasets, model number 2 indicates higher prediction performances among all 5 models and therefore, this model is selected for AOp prediction.
In the modeling process, the Gaussian membership function which is the most common membership function in fuzzy systems is utilized (Jahed Armaghani et al. 2014a). The characterizations of the proposed ANFIS-based model are tabulated in Table 8. The linguistic variables for the input parameters are assigned as low (L), medium (M), and high (H). Figures 5, 6, 7, 8, and 9 show the membership functions assigned for the input parameters in the proposed ANFIS model.

Membership functions assigned for powder factor

Membership functions assigned for maximum charge per delay

Membership functions assigned for stemming length

Membership functions assigned for burden to spacing ratio

Membership functions assigned for distance
Multiple regression analysis
Multiple regression (MR) analysis is utilized to propose relationships between independent and dependent variables. By performing regression analysis, parameters of a function which are best fitted to a set of data observation are determined. In fact, regression analysis measures the degree of influence of the independent or input parameters on dependent or output parameter. For the bivariate regression, the dependent variable can be calculated using the simple equation as follows:
where a is constant, y and x are dependent and independent parameters, respectively. This type of equation could be extended to a multiple variable concept as follows:
where x 1, x 2, x 3, … x n are different independent variables to predict y.
MR technique has been widely-used to solve the problems in different fields of engineering. In the case of geotechnical engineering, many researchers have been performed this method as well. Gokceoglu and Zorlu (2004) utilized this method for proposing a multiple equation to predict strength of rock samples. Bahrami et al. (2011) proposed a MR equation for prediction of rock fragmentation resulting from blasting operation. Shear strength parameters (C and ϕ) of rock were predicted using LMR technique in the study conducted by Jahed Armaghani et al. (2014b).
To apply MR analysis for AOp prediction, AOp is considered to be the product of the five parameters (same as the ANN analysis). The statistical software package Microsoft Excel 2013 is used for regression analysis and Eq. 13 is produced. Table 9 shows the statistical information regarding the developed MR predictive model.
Results and discussion
In this study, an attempt has been made to show the capability of the applied methods (MR, ANN, and ANFIS) in predicting AOp. The models of ANFIS, ANN, and MR are constructed using five input parameters (i.e., PF, MC, ST, BS, and D). The graph of predicted AOp values using MR approach against the monitored AOp values for all 128 datasets is illustrated in Fig. 10. As shown in this figure, the relatively low R 2 value equal to 0.766 and high RMSE value equal to 6.599 reveal the low reliability of the MR method to predict AOp. In addition, Fig. 11 shows the predicted AOp values by performing ANN model plotted against the monitored AOp values for training and testing datasets. The R 2 and RMSE values of 0.913 and 4.191 for training, and 0.920 and 4.092 for testing datasets show that the ANN approach is able to predict AOp with relatively suitable accuracy. Furthermore, in prediction of AOp by ANFIS, R 2 and RMSE values of 0.973 and 2.285 for training, and 0.958 and 2.492 for testing datasets suggest the superiority of this model in AOp prediction (see Fig. 12).

Monitored and predicted values of AOp though MR analysis

Monitored and predicted values of AOp though ANN analysis for training and testing datasets

Monitored and predicted values of AOp though ANFIS analysis for training and testing datasets
In this study, RMSE and amount of value account for (VAF) are computed to control the capacity performance of the predictive models as:
where, y and y′ are the obtained and estimated values, respectively, and N is the total number of data. The model will be excellent if the RMSE is zero and VAF is 100. Performance indices obtained by predictive models for all 128 datasets are shown in Table 10. In addition, to demonstrate capability of the developed models in predicting AOp, several empirical models including Siskind et al. (1980), Hopler (1998) and Kuzu et al. (2009) from all presented models in Table 1 are selected to predict measured values of AOp. As shown in Table 10, the ANFIS predictive model can provide higher performance in prediction of AOp compared to other developed models as well as previous empirical models. For instance, in the case of R 2, values of 0.653, 0.634, and 0.689 for Siskind et al. (1980), Hopler (1998) and Kuzu et al. (2009) models, respectively, indicate lower prediction capacities of empirical models, while these values are obtained as 0.766, 0.914, and 0.971 for MR, ANN and ANFIS models, respectively. In addition, a large difference can be seen between RMSE results of empirical and developed models. Predicted AOp values using Siskind et al. (1980), Hopler (1998) and Kuzu et al. (2009) models, respectively, against measured AOp values are shown in Figs. 13, 14, and 15.

Predicted values of AOp using Siskind et al. (1980) model against monitored AOp

Predicted values of AOp using Hopler (1998) model against monitored AOp

Predicted values of AOp using Kuzu et al. (2009) model against monitored AOp
Sensitivity analysis
Sensitivity analysis is a technique to evaluate the most effective input parameters on output(s). To apply this, the cosine amplitude method can be utilized (Jong and Lee 2004). This method is illustrated in the following equation:
where x i and x j represent input and output parameters, respectively, and n is the number of all datasets.
Monjezi et al. (2012b) used this technique for in order to show the effects of different parameters on UCS of the rock. Effective parameters on bearing capacity of the pile were obtained by CAM in the study conducted by Momeni et al. (2014). Rezaei et al. (2012) utilized this method in obtaining influential parameters on burden in blasting operations.
Based on Eq. 16, a series of analyses were performed on input and output parameters. Figure 16 shows the strengths of the relations (r ij values) between AOp and input parameters. As it can be seen in this figure, the most influential parameters on AOp are maximum charge per delay (MC), and distance from the blast face (D).

Strength of relations for input parameters
Conclusion
An ANFIS model is developed to predict AOp induced by blasting in quarry sites. In order to obtain the optimum performance, several models are trained and tested using measured data. To construct the models, 128 datasets including influential parameters on AOp are measured from three granite quarry sites in Malaysia. Each dataset is associated with one AOp recorded from corresponding blasting operation. In addition, utilizing the same input and output parameters, AOp values are predicted using pre-developed ANN and MR methods. The results demonstrated the superiority of the proposed ANFIS model to predict AOp induced by blasting among other predictive models. It can be concluded that the proposed ANFIS model is able to be used as an accurate and applicable approach for estimation of AOp induced by blasting in quarry sites.
References
Bahrami A, Monjezi M, Goshtasbi K, Ghazvinian A (2011) Prediction of rock fragmentation due to blasting using artificial neural network. Eng Comput 27(2):177–181
Baker WE, Cox PA, Kulesz JJ, Strehlow RA, Westine PS (1983) Explosion hazards and evaluation. Elsevier Science
Bhandari S (1997) Engineering Rock Blasting Operations. A.A. Balkema, Netherlands
Dowding CH (2000) Construction vibrations. In: Dowding, editor, pp 204–207
Dreyfus G (2005) Neural Networks: methodology and application, 2nd edn. Springer, Berlin Heidelberg
Du KL, Lai AKY, Cheng KKM, Swamy MNS (2002) Neural methods for antenna array signal processing: a review. Signal Process 82:547–561
Ebrahimi E, Monjezi M, Khalesi MR, Jahed Armaghani D (2015) Prediction and optimization of back-break and rock fragmentation using an artificial neural network and a bee colony algorithm. Bull Eng Geol Environ. doi:10.1007/s10064-015-0720-2
Engelbrecht AP (2007) Computational intelligence: an introduction. Wiley
Fausett, LV (1994) Fundamentals of Neural Networks: Architecture, Algorithms and Applications: Prentice-Hall, Englewood Cliffs
Ghoraba S, Monjezi M, Talebi N, Moghadam MR, Jahed Armaghani D (2015) Prediction of ground vibration caused by blasting operations through a neural network approach: a case study of Gol-E-Gohar Iron Mine, Iran. J Zhejiang Univ Sci A. doi:10.1631/jzus.A1400252
Gokceoglu C, Zorlu K (2004) A fuzzy model to predict the uniaxial compressive strength and the modulus of elasticity of a problematic rock. Eng Appl Artif Intell 17:61–72
Griffiths MJ, Oates JAH, Lord P (1978) The propagation of sound from quarry blasting. J Sound Vib 60:359–370
Grima MA, Bruines PA, Verhoef PNW (2000) Modeling tunnel boring machine performance by neuro-fuzzy methods. Tunn Undergr Space Technol 15(3):260–269
Hagan MT, Demuth HB, Beale MH (1996) Neural network design. Pws Pub, Boston
Hajihassani M, Jahed Armaghani D, Sohaei H, Tonnizam Mohamad E, Marto A (2014) Prediction of airblast-overpressure induced by blasting using a hybrid artificial neural network and particle swarm optimization. Appl Acoust 80:57–67
Hajihassani M, Jahed Armaghani D, Monjezi M, Mohamad ET, Marto A (2015) Blast-induced air and ground vibration prediction: a particle swarm optimization-based artificial neural network approach. Environ Earth Sci. doi:10.1007/s12665-015-4274-1
Haykin S (1999) Neural networks, 2nd edn. Prentice-Hall, Englewood Cliffs
Hopler RB (1998) Blasters' Handbook. International Society of Explosives Engineers
Hornik K, Stinchcombe M, White H (1989) Multilayer feedforward networks are universal Approximators. Neural Netw 2:359–366
Hustrulid WA (1999) Blasting principles for open pit mining: General design concepts. Balkema
Iphar M, Yavuz M, Ak H (2008) Prediction of ground vibrations resulting from the blasting operations in an open-pit mine by adaptive neuro-fuzzy inference system. Environ Geol 56:97–107
Jahed Armaghani D, Hajihassani M, Tonnizam Mohamad E, Marto A, Noorani SA (2013) Blasting-induced flyrock and ground vibration prediction through an expert artificial neural network based on particle swarm optimization. Arab J Geosci. doi:10.1007/s12517-013-1174-0
Jahed Armaghani D, Tonnizam Mohamad E, Momeni E, Narayanasamy MS, Mohd For MA (2014a) An adaptive neuro-fuzzy inference system for predicting unconfined compressive strength and Young’s modulus: a study on Main Range granite. Bull Eng Geol Environ. doi:10.1007/s10064-014-0687-4
Jahed Armaghani D, Hajihassani M, Yazdani BB, Marto A, Tonnizam Mohamad E (2014b) Indirect measure of shale shear strength parameters by means of rock index tests through an optimized artificial neural network. Measurement 55:487–498
Jahed Armaghani D, Hajihassani M, Monjezi M, Mohamad ET, Marto A, Moghaddam MR (2015) Application of two intelligent systems in predicting environmental impacts of quarry blasting. Arab J Geosci. doi:10.1007/s12517-015-1908-2
Jang RJS (1993) Anfis: adaptive-network-based fuzzy inference system. IEEE Trans Syst Man Cybern 23:665–685
Jang RJS, Sun CT, Mizutani E (1997) Neuro-fuzzy and soft computing. PTR Prentice Hall
Jin Y, Jiang J (1999) Techniques in neural-network based fuzzy system identification and their application to control of complex systems. Fuzzy theory systems, techniques and applications. Academic Press, New York, pp 112–128
Jong YH, Lee CI (2004) Influence of geological conditions on the powder factor for tunnel blasting. Int J Rock Mech Min Sci 41:533–538
Kaastra I, Boyd M (1996) Designing a neural network for forecasting financial and economic time series. Neuro Comput 10:215–236
Kalinli A, Acar MC, Gunduz Z (2011) New approaches to determine the ultimate bearing capacity of shallow foundations based on artificial neural networks and ant colony optimization. Eng Geol 117:29–38
Kanellopoulas I, Wilkinson GG (1997) Strategies and best practice for neural network image classification. Int J Remote Sensing 18:711–725
Khandelwal M, Kankar PK (2011) Prediction of blast-induced air overpressure using support vector machine. Arab J Geosci 4:427–433
Khandelwal M, Singh TN (2005) Prediction of blast induced air overpressure in opencast mine. Noise Vibration Worldwide 36:7–16
Khandelwal M, Singh TN (2006) Prediction of blast induced ground vibrations and frequency in opencast mine: a neural network approach. J Sound Vib 289:711–725
Kosko B (1994) Neural networks and fuzzy systems: a dynamical systems approach to machine intelligence. Prentice Hall, New Delhi, pp 12–17
Kuzu C, Fisne A, Ercelebi SG (2009) Operational and geological parameters in the assessing blast induced airblast-overpressure in quarries. Appl Acoust 70:404–411
Marto A, Hajihassani M, Jahed Armaghani D, Tonnizam Mohamad E, Makhtar AM (2014) A Novel Approach for Blast-Induced Flyrock Prediction Based on Imperialist Competitive Algorithm and Artificial Neural Network. Sci World J Article ID 643715
Masters T (1994) Practical neural network recipes in C++. Academic Press, Boston
McKenzie C (1990) Quarry blast monitoring: technical and environmental perspectives. Quarry Manag 17:23–34
Mohamed MT (2011) Performance of fuzzy logic and artificial neural network in prediction of ground and air vibrations. Int J Rock Mech Min Sci 48:845–851
Momeni E, Nazir R, Jahed Armaghani D, Maizir H (2014) Prediction of pile bearing capacity using a hybrid genetic algorithm-based ANN. Measurement 57:122–131
Monjezi M, Bahrami A, Varjani AY, Sayadi AR (2011) Prediction and controlling of flyrock in blasting operation using artificial neural network. Arab J Geosci 4:421–425
Monjezi M, Khoshalan HA, Varjani AY (2012a) Prediction of flyrock and back-break in open pit blasting operation: a neuro-genetic approach. Arab J Geosci 5:441–448
Monjezi M, Khoshalan HA, Razifard M (2012b) A neuro-genetic network for predicting uniaxial compressive strength of rocks. Geotech Geol Eng 30(4):1053–1062
Morhard RC (1987) Explosives and Rock Blasting. Atlas Powder Company
National Association of Australian State Road Authorities (1983) Explosives in Roadworks - A Users Guide. NAASRA, Sydney
Rezaei M, Monjezi M, Moghaddam SG, Farzaneh F (2012) Burden prediction in blasting operation using rock geomechanical properties. Arab J Geosci 5:1031–1037
Ripley BD (1993) Statistical aspects of neural networks. In: Barndoff- Neilsen OE, Jensen JL, Kendall WS (eds) Networks and chaos-statistical and probabilistic aspects. Chapman & Hall, London, pp 40–123
Roy PP (2005) Rock blasting: effects and operations. Taylor & Francis, US
Segarra P, Domingo JF, López LM, Sanchidrián JA, Ortega MF (2010) Prediction of near field overpressure from quarry blasting. Appl Acoust 71:1169–1176
Sezer EA, Nefeslioglu HA, Gokceoglu C (2014) An assessment onproducing synthetic samples by fuzzy C-means for limitednumber of data in prediction models. Appl Soft Comput 24:126–134
Shahin MA, Maier HR, Jaksa MB (2002) Predicting settlement of shallow foundations using neural networks. J Geotech Geoenviron Eng 128:785–793
Shirani Faradonbeh R, Monjezi M, Jahed Armaghani D (2015) Genetic programing and non-linear multiple regression techniques to predict backbreak in blasting operation. Eng Comput. doi:10.1007/s00366-015-0404-3
Simpson PK (1990) Artificial neural system-foundation, paradigm, application and implementations. Pergamon Press, New York
Siskind DE, Stachura VJ, Stagg MS, Kopp JW (1980) Structure response and damage produced by airblast from surface mining. United States Bureau of Mines, Twin Cities Research Center
Sonmez H, Gokceoglu C (2008) Discussion on the paper by H. Gullu and E. Ercelebi “A neural network approach for attenuation relationships: An application using strong ground motion data from Turkey”. Eng Geol 97:91–93
Sonmez H, Gokceoglu C, Nefeslioglu HA, Kayabasi A (2006) Estimation of rock modulus: for intact rocks with an artificial neural network and for rock masses with a new empirical equation. Int J Rock Mech Min Sci 43:224–235
Takagi T, Sugeno M (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Trans Syst Man Cybern 15:116–132
Tonnizam Mohamad E, Hajihassani M, Jahed Armaghani D, Marto A (2012) Simulation of blasting-induced air overpressure by means of artificial neural networks. Int Rev Model Simul 5:2501–2506
Tonnizam Mohamad E, Jahed Armaghani D, Hajihassani M, Faizi K, Marto A (2013) A simulation approach to predict blasting-induced flyrock and size of thrown rocks. Electr J Geotech Eng 18:365–374
Tonnizam Mohamad E, Jahed Armaghani D, Momeni E, Alavi Nezhad Khalil Abad SV (2014) Prediction of the unconfined compressive strength of soft rocks: a PSO-based ANN approach. Bull Eng Geol Environ. doi:10.1007/s10064-014-0638-0
Veelenturf Leo PJ (1995) Analysis and applications of artificial neural networks. Prentice hall, London
Wang C (1994) A theory of generalization in learning machines with neural application. PhD thesis, The University of Pennsylvania, USA
Wharton RK, Formby SA, Merrifield R (2000) Airblast TNT equivalence for a range of commercial blasting explosives. J Haz Mater 79:31–39
Wiss JF, Linehan PW (1978) Control of vibration and blast noise from surface coal mining, Wiss, Janney. Elstner and Associates, Inc., Northbrook
Yilmaz I, Yuksek G (2009) Prediction of the strength and elasticity modulus of gypsum using multiple regression ANN, and ANFIS models. Int J Rock Mech Min Sci 46:803–810
Acknowledgments
The authors would like to extend their appreciation to the Government of Malaysia and Universiti Teknologi Malaysia for the FRGS grant no. 4F406 and for providing the required facilities that made this research possible.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jahed Armaghani, D., Hajihassani, M., Sohaei, H. et al. Neuro-fuzzy technique to predict air-overpressure induced by blasting. Arab J Geosci 8, 10937–10950 (2015). https://doi.org/10.1007/s12517-015-1984-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12517-015-1984-3