
Abstract
In this study, an attempt has been made to evaluate and predict the blast-induced ground vibration by incorporating explosive charge per delay and distance from the blast face to the monitoring point using artificial neural network (ANN) technique. A three-layer feed-forward back-propagation neural network with 2-5-1 architecture was trained and tested using 130 experimental and monitored blast records from the surface coal mines of Singareni Collieries Company Limited, Kothagudem, Andhra Pradesh, India. Twenty new blast data sets were used for the validation and comparison of the peak particle velocity (PPV) by ANN and conventional vibration predictors. Results were compared based on coefficient of determination and mean absolute error between monitored and predicted values of PPV.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Drilling and blasting is one of the most economical methods used for the exploitation of economic minerals from the earth’s crust. A huge amount of money spent on mechanical breaking of rock and an increasing number of innovations, aimed at enabling expensive machines to cope up with hostile conditions, attest to the problems in the future of blasting and a hope that an economical replacement can be found. It takes a lot of energy to break rock. Energy in a blast, which is not used for rock breakage, is wasted in the form of ground vibration, air blast, fly rock, noise, dust dispersion, back break, etc. [6]. An extensive amount of research has been done to determine the safe levels of vibrations.
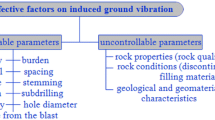
The ill effects of blasting, i.e., ground vibrations, air blasts, fly rocks, back breaks, noises, etc., are unavoidable and cannot be completely eliminated, but certainly can be minimized up to a permissible level to avoid damage to the surrounding environment with the existing structures [9, 10, 27]. Among all the ill effects, ground vibration is a major concern to the mine planners, designers and environmentalists [6]. A number of researchers have suggested various methods to minimize the ground vibration level during blasting. Ground vibration is directly related to the quantity of explosive used and the distance between the blast face and the monitoring point, as well as geological and geotechnical conditions of the rock units in the excavation area.
Geological and geotechnical conditions and the distance between the blast face and the monitoring point cannot be altered, but only one factor, i.e., quantity of explosive, can be estimated based on certain empirical formulae proposed by different researchers [1, 2, 5, 14, 21] to limit ground vibrations to a permissible limit. An appropriate and rock-friendly blasting can be the only alternative to the smooth progress of the rock removal process.
For a greater applicability of these characteristics to blasting, a lot of work has been carried out to find and suggest a definite model, which can be rock friendly. Progress has been made in recent years in the ability to predict the peak particle velocity (PPV), but the state of the art is deficient in many ways. On the basis of detailed investigation, a viable approach for the prediction is necessary, and an artificial intelligence (AI) comes in handy to fulfill this approach.
The artificial neural network (ANN) is a new branch of intelligence science and has developed rapidly since the 1980s. Nowadays, ANN is considered to be one of the intelligent tools to understand the complex problems. Neural network has the ability to learn from the pattern previously acquainted. Once the network has been trained, with sufficient number of sample data sets, it can make predictions, on the basis of its previous learning, about the output related to new input data set of similar pattern [12]. Due to its multidisciplinary nature, ANN is becoming popular among researchers, planners, designers, etc., as an effective tool for the accomplishment of their work. Therefore, ANN is being successfully used in many industrial areas as well as in research.
Maulenkamp and Grima [17] developed a model by which uniaxial compressive strength can be predicted from Equotip hardness. It has been reported that the prediction of uniaxial compressive strength by ANN is closer to the measured values. It is indicated by the consistency of the correlation coefficient for the different test sets. Yang and Zhang [28] investigated the point load testing with artificial neural network. Cai and Zhao [3] used ANN for tunnel design and optimal selection of the rock support measure and to ensure the stability of the tunnel. Singh et al. [24] predicted the strength property of schistose rocks by neural network.
The stability of the waste dump from the dump slope angle and dump height was investigated by Khandelwal and Singh [11]. They found very realistic results compared to the other analytical approach. Maity and Saha [16] assessed the damage in the structures from changes in the static parameters with the neural network. Singh et al. [23] predicted the P-wave velocity and anisotropic properties of rocks with the neural network.
Khandelwal and Singh [8] predicted the air overpressure from distance and sound pressure level using neural network and compared the findings with the United States Bureau of Mines (USBM) predictor (cube root-scaled distance) and multi-variate regression analysis (MVRA) equation. They found better results with ANN than with USBM and MVRA predictions. Tawadrous [26] used back-propagation neural network to predict the burden and spacing of the blast pattern using rock type, stratification, blasthole diameter, bench height, type of explosive, priming position, powder factor and fragmentation size. He trained the network using 43 case histories collected from the various literatures and validated it with 16 cases from operational quarries. He found very high correlation for the prediction of burden and spacing by ANN. Neaupane and Adhikari [20] predicted the ground movement around tunnels using ANN. Surface settlement above a tunnel and horizontal ground movement due to a tunnel construction were predicted with the help of tunnel diameter, depth to the tunnel axis, normalized volume loss, soil strength, groundwater characteristics and construction methods. The output variables were settlement and trough width. Parameters for the prediction of horizontal ground movement included diameter to depth ratio, unit weight of soil and cohesion. The network demonstrated a promising result and predicted the desired goal fairly successfully.
Monjezi and Dehghani [19] used ANN to study the back break at an iron ore mine of Iran, taking into consideration the burden, spacing, stemming, bench height, powder factor, pattern geometry, holes per row and rows per blast. Khandelwal and Singh [10] also studied the blast vibration and frequency using rock, blast design and explosive parameters with the help of ANN and compared their results with multi-variate regression analysis.
Mohamed [18] applied ANN for the prediction and control of blast vibration in a limestone quarry of Egypt. He used three different models having 1 parameter (scaled distance), 2 parameters (distance between blast face and monitoring point and maximum explosive charge per delay) and 15 input parameters (hole diameter, burden, spacing, bench height, hole inclination, maximum explosive charge per delay, total explosive per blast, explosive density, rock density, porosity, compressive strength, modulus of elasticity, distance between blast face and monitoring point, velocity of detonation and propagation wave velocity) to predict the PPV and found that the ANN model, which was based on the 15 number of inputs parameters gives better prediction of PPV over single or two input parameters. He also established that different models of neural networks give much better prediction of PPV than the scaling law model.
These applications demonstrate that the neural network models are superior in solving problems in which many complex parameters influence the process and results that are not fully understood and where historical or experimental data are available. The prediction of blast-induced ground vibrations is also of this type.
In the present investigation, few important and widely used conventional vibration predictors have been used to predict the peak particle velocity (PPV) and computed results are compared with actual field data. The same input–output data sets have been also used for the prediction with artificial neural network (ANN). The basic idea is to find the scope and suitability of the ANN for prediction of PPV over the widely used conventional vibration predictors.
2 Mechanism of ground vibration
When an explosive charge detonates in the blast hole, intense dynamic stresses are set up around it due to sudden acceleration of the rock mass by the detonating gas pressure on the wall of the blast hole. The strain waves transmitted to the surrounding rock sets up a wave motion in the ground [5]. The strain energy carried out by these strain waves fragments the rock mass due to different breakage mechanisms, such as crushing, radial cracking and reflection breakage in the presence of a free face. The crushed zone and radial fracture zone encompass a volume of permanently deformed rock. When the stress wave intensity diminishes to the level, where no permanent deformation occurs within the rock mass (i.e., beyond the fragmentation zone), strain waves propagate through the medium as elastic waves, oscillating the particles through which they travel (Fig. 1). These waves in the elastic zone are known as ground vibration, which closely conform to the visco-elastic behavior. The wave motion spreads concentrically from the blast site in all the directions and gets attenuated due to spreading of fixed energy over a greater mass of material and away from its origin [4]. Though the ground vibration attenuates exponentially with distance, due to the large quantity of explosive, it can still be high enough to cause damage to buildings and other man-made and natural structures by causing dynamic stresses that exceed the material strength [25].

Ground vibration due to blasting
3 The study area
The field study was conducted at three different open cast coal mines, namely PK OCP-III, GDK OCP-II and JVR OCP-I of the Sinagreni Collieries Company Limited (SCCL), Andhra Pradesh, India. The SCCL area is mostly covered by limestone of Pakhals in the western and southern parts and slowly grades into the sandstone of the Gondwana series in the northeasterly direction. The other geological units found within the project area are Talcher and Barakars. Kamthis are observed away from the project area in the northern and eastern directions.
The limestone is massive, flaggy and at places striking in the NW–SE direction, dipping toward NE with a dip amount varying from 35° to 40°. At the contact zone between limestone and sandstone, calcareous beds are observed that grades into sandstone. The sandstone is soft and coarse-grained. The various units of lower Gondwana abut each other in different directions due to structural disturbances in that area.
In general, this area consists of soft soil up to 2 m depth, followed by medium to coarse-grained gray sandstone overburden along with shale and thick coal bands of varying thickness of 17.67–49.58 m. The thickness of he top seam varies from 1.4 to 4.4 m, and the bottom seam thickness varies from 2.75 to 5.07 m. The partition thickness consists of mostly medium-grained gray sandstone and varies from 4.87 to 13.0 m.
4 The philosophy of artificial neural network
Artificial neural network (ANN) is a branch of the ‘artificial intelligence’, which also includes case-based reasoning, expert systems and genetic algorithms. The Classical statistics, Fuzzy logic and Chaos theory are also considered to be related fields. ANN is an information processing system simulating the structure and functions of the human brain. It is a highly interconnected structure that consists of many simple processing elements (called neurons) capable of performing massively parallel computation for data processing and knowledge representation. The neural network is first trained by processing a large number of input patterns and the corresponding output. The neural network is able to recognize similarities, when presented with a new input pattern after proper training and predicting the output pattern.
Neural networks are able to detect similarities in inputs, even though a particular input may never have been known previously. This property allows its excellent interpolation capabilities, especially when the input data is noisy (not exact). Neural networks may be used as an alternative for auto correlation, multivariable regression, linear regression, trigonometric and other statistical analysis techniques. A particular network can be defined using three fundamental components: transfer function, network architecture and learning law [13, 22]. One has to define these components, depending on the problem to be solved.
4.1 Network training
A network first needs to be trained before interpreting new information. A number of algorithms are available for training of neural networks, but the back-propagation algorithm is the most versatile and robust technique. It provides the most efficient learning procedure for multilayer neural networks. Also, the fact that back-propagation algorithms are especially capable of solving predictive problems makes them popular [17]. The feed-forward back-propagation neural network (BPNN) always consists of at least three layers: input layer, hidden layer and output layer. Each layer consists of a number of elementary processing units, called neurons, and each neuron is connected to the next layer through weights, i.e., neurons in the input layer will send their output as input to neurons in the hidden layer and similar is the connection between the hidden and output layer. The number of hidden layers and neurons in the hidden layer change according to the problem to be solved. The number of input and output neurons is the same as the number of input and output variables.
To differentiate between the various processing units, values called biases are introduced in the transfer functions. Except for the input layer, all neurons in the back-propagation network are associated with a bias neuron and a transfer function. The bias is much like a weight, except that it has a constant input of 1, while the transfer function filters the summed signals received from this neuron. These transfer functions are designed to map the net output of a neuron or layer to its actual output. The application of these transfer functions depends on the purpose of the neural network. The output layer produces the computed output vectors corresponding to the solution [12].
During training of the network, data are processed through the input layer to the hidden layer, until it reaches the output layer (forward pass). In this layer, the output is compared to the measured values (i.e., the “true” output). The difference or error between both is propagated back through the network (backward pass) updating the individual weights of the connections and the biases of the individual neurons. The input and output data are mostly represented as vectors called training pairs. The process as mentioned above is repeated for all the training pairs in the data set, until the network error converges to a threshold defined by a corresponding function, usually the root mean squared error (RMS) or summed squared error (SSE).
In Fig. 2, the jth neuron, in the hidden layer, is connected to a number of inputs

Back-propagation neural network [19]
The net input values in the hidden layer will be:
where x i input units, w ij weight on the connection of the ith input and jth neuron, θ j bias neuron (optional), and n number of input units.
So, the net output from the hidden layer is calculated using a logarithmic sigmoid function
The total input to the kth unit is:
where θ k bias neuron, w jk weight between jth neuron and kth output.
So, the total output from kth unit will be
In the learning process, the network is presented with a pair of patterns, an input pattern and a corresponding output pattern. The network computes its own output pattern using its (mostly incorrect) weights and thresholds. Now, the actual output is compared with the desired output. Hence, the error at any output in layer k is
where t k desired output, and O k actual output.
The total error function is given by:
Training of the network is basically a process of arriving at an optimum weight space for the network. The steepest descent error surface is made using the following rule:
where η learning rate parameter, and E error function.
The update of weights for the (n + 1)th pattern is given as:
Similar logic applies to the connections between the hidden and output layers [12]. This procedure is repeated with each pair of training case. Each pass through all the training patterns is called a cycle or epoch. The process is then repeated with as many epochs as needed until the error is within the user-specified goal. A schematic representation of the whole process is shown in Fig. 3 [19].

ANN process flowchart [19]
5 Data set
One of the most important stages in the ANN technique is data collection. The data was divided into training and validation data sets using sorting method to maintain statistical consistency. Data sets for validation were extracted at regular intervals from the sorted database and the remaining data sets were used for training and testing. In the present study, 150 blast vibration records were monitored at different vulnerable and strategic locations in and around the mines as per ISRM [7] standards, among which 20 data sets were chosen for validation of the network. The range of maximum explosive charge used per delay and distance of monitoring point from the blasting face is 75–6,000 kg and 35–8,400 m, respectively, whereas the range of PPV is 0.31–92.30 mm/s. A list of sample data for training and validation of the model is given in Tables 1 and 2, respectively.
6 Network architecture
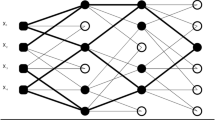
Feed-forward back-propagation neural network architecture (3-5-1) is adopted due to its appropriateness for the identification problem. Pattern matching is basically an input/output mapping problem. The closer the mapping, the better is the performance of the network.
A three-layer feed-forward back-propagation neural network was developed to predict the PPV. The input layer has two input neurons and the output layer has one neuron, while the hidden layer comprises five hidden neurons (Fig. 4). Training and testing of the network was carried out using 130 cases, whereas validation of the network was performed using 20 different cases.

Suggested ANN for the case study
All the input and output parameters were scaled between 0 and 1. Equation 10 was used for the scaling of input and output parameters.
The architecture of the network is tabulated below:
1. No. of input neurons: | 2 |
2. No. of output neurons: | 1 |
3. No. of hidden layers: | 1 |
4. No. of hidden neurons: | 5 |
5. No. of training epochs: | 700 |
6. No. of training datasets: | 130 |
7. No. of validation datasets: | 20 |
8. Error goal: | 0.0 |
7 Testing and validation of the ANN technique
To test and validate the ANN model, a data set, which was not used while training the network, was employed. The results are presented in this section to demonstrate the performance of the networks. Coefficient of determination (CoD) and mean absolute error (MAE) between the predicted and measured values is taken as the measure of performance.
As the Bayesian interpolation [15] was used, there was no danger of over-fitting or under-fitting problems. Figure 5 illustrates the measured and predicted PPV on the 1:1 slope line. All predicted data points were well within the 1:1 slope line. This clearly indicates the ability of ANN for the prediction of PPV. Here, CoD is as high as 0.919, whereas MAE is 0.352.

Measured versus ANN predicted PPV
8 Prediction by conventional predictors
Table 3 illustrates the various available conventional vibration predictor equations proposed by different researchers [1, 2, 5, 14, 21]. The site constants were determined from the multiple regression analysis of the previously mentioned 130 cases. The calculated values of site constants for the various predictor equations are given in Table 4.
Figures 6, 7, 8, 9 and 10 illustrate the relationship between the measured and predicted PPV by conventional predictor equations on a 1:1 slope line with their respective CoD. Here, CoD varies between 0.225 and 0.591. It is maximum for the Ambraseys–Hendron predictor, while minimum for the Langefors–Kihlstrom predictor.

Measured versus predicted PPV by USBM predictor

Measured versus predicted PPV by Langefors–Kihlstrom predictor

Measured versus predicted PPV by Ambraseys–Hendron predictor

Measured versus predicted PPV by Bureau of Indian Standard predictor

Measured versus predicted PPV by CMRI predictor
9 Results and discussion
Figure 11 shows a comparison between predicted PPV by ANN and conventional predictor equations. Here, prediction by ANN is closer to the measured PPV, whereas prediction by conventional predictors has a wide variation.

Comparison of PPV
All the conventional predictors have site-specific constants and these are not able to predict the safe charge for even other similar geo-mining conditions. The value of site constants also varied as the ground conditions changed. Moreover, these are derived based on only two parameters, i.e., maximum charge per delay and the distance from the monitoring point to the blast face. These empirical predictors are based on the linear relation between scaled distance and PPV. If the safe charge of explosive is calculated based on the above predictors, certainly one may face problems in controlling the ground vibration. This may, sometimes, result in either under or overestimation of the explosive requirement. The uses of any predictor without validation would cause damage to the surrounding and hinder the smooth working of the mine.
It can be seen that ANN demonstrates superiority over conventional vibration predictors. Table 5 shows the CoD and MAE of PPV predicted by ANN and conventional predictors. The prediction capability of ANN is quite remarkable and compares well to field observations.
10 Conclusions
Based on the study, it is established that the feed-forward back-propagation neural network approach seems to be the better option for close and appropriate prediction of PPV to protect the surrounding environment and structure. The use of any predictor without validation may invite further complications in the smooth conduct of mining operations. This study indicates that all conventional predictors used in the study either overestimate or underestimate the safe explosive charge that keeps the PPV under a safe limit. Both the predictions are not appropriate for the site, where populations reside in close vicinity of the mine. ANN results indicate very close agreement for the PPV with the field data sets as compared to conventional predictors. By adopting the ANN technique, PPV can be predicted prior to the blast. The blast design can be modified accordingly, so that any nuisance due to the blast can be minimized, as well as higher utilization of explosive energy can also be achieved. If more numbers of data sets are used in ANN, the prediction will be more accurate, because it does not follow the over-fitting and under-fitting law of curves as in the case of vibration predictors.
Considering the complexity of the relationship among the inputs and outputs, the results obtained by ANN are highly encouraging and satisfactory. ANN could learn new patterns that were not previously available in the training data set. ANN can also update knowledge over time as long as more training data sets are presented and can process information in parallel. Therefore, the technique results in a greater degree of accuracy than any other analysis techniques. Hence, the technique proves to be economical and easier in comparison to tedious expensive experimental work.
References
Ambraseys NR, Hendron AJ (1968) Dynamic behaviour of rock masses: rock mechanics in engineering practices. Wiley, London
Bureau of Indian Standard (1973) Criteria for safety and design of structures subjected to underground blast. ISI Bulletin IS-6922
Cai JG, Zhao J (1997) Use of neural networks in rock tunneling. In: Proceedings of computer methods and advances in geomechanics, IACMAG, China, pp 613–618
Dowding CH (1985) Blast vibration monitoring and control. Prentice-Hall Inc, Englewoods Cliffs
Duvall, WI, Petkof B (1959) Spherical propagation of explosion generated strain pulses in rock. USBM RI, 5483, p 21
Hagan TN (1973) Rock breakage by explosives, In: Proceedings of national symposium on rock fragmentation, Adelaide, pp 1–17
ISRM (1992) Suggested method for blast vibration monitoring. Int J Rock Mech Min Sci Geomech Abstr 29:145–146
Khandelwal M, Singh TN (2005) Prediction of blast-induced air overpressure in opencast mine. Noise Vib Worldw 36:7–16
Khandelwal M, Singh TN (2006) Prediction of blast-induced ground vibrations and frequency in opencast mine—a neural network approach. J Sound Vib 289:711–725
Khandelwal M, Singh TN (2009) Prediction of blast-induced ground vibrations using artificial neural network. Int J Rock Mech Min Sci 46:1214–1222
Khandelwal M, Singh TN (2002) Prediction of waste dump stability by an intelligent approach. In: National symposium on new equipment—new technology, management and safety, ENTMS, Bhubaneshwar, pp 38–45
Khandelwal M (2008) Evaluation and prediction of blast-induced ground vibration and frequency for surface mine—a neural network approach. Ph.D. Thesis, Indian Institute of Technology, Bombay, India
Kosko B (1994) Neural networks and fuzzy systems: a dynamical systems approach to machine intelligence. Prentice Hall, New Delhi
Langefors U, Kihlstrom B (1963) The modern technique of rock blasting. Wiley, New York
MacKay DJC (1992) Bayesian interpolation. Neural Comput 4:415–447
Maity D, Saha A (2004) Damage assessment in structure from changes in static parameters using neural networks. Sadhana 29:315–327
Maulenkamp F, Grima MA (1999) Application of neural networks for the prediction of the unconfined compressive strength (UCS) from Equotip Hardness. Int J Rock Mech Min Sci 36:29–39
Mohamed MT (2009) Artificial neural network for prediction and control of blasting vibrations in Assiut (Egypt) limestone quarry. Int J Rock Mech Min Sci 46:426–431
Monjezi M, Dehghani H (2008) Evaluation of effect of blasting pattern parameters on back break using neural networks. Int J Rock Mech Min Sci 45(8):1446–1453
Neaupane KM, Adhikari NR (2006) Prediction of tunneling-induced ground movement with the multi-layer perceptron. Int J Tunnel Undergr Space Technol 21:151–159
Pal Roy P (1993) Putting ground vibration predictors into practice. Colliery Guard 241:63–67
Simpson PK (1990) Artificial neural system—foundation, paradigm, application and implementations. Pergamon Press, New York
Singh TN, Kanchan R, Saigal K, Verma AK (2004) Prediction of P-wave velocity and anisotropic properties of rock using Artificial Neural Networks technique. J Sci Ind Res 63:32–38
Singh VK, Singh D, Singh TN (2001) Prediction of strength properties of some schistose rock. Int J Rock Mech Min Sci 38:269–284
Siskind DE, Stagg MS, Kopp, JW, Dowding CH (1980) Structure response and damage produced by ground vibration from surface mine blasting. USBM, RI, 8507, p. 74
Tawadrous AS (2006) Evaluation of artificial neural networks as a reliable tool in blast design. Int Soc Explos Eng 1:1–12
Wiss JF, Linehan PW (1978) Control of vibration and air noise from surface coal mines—III. Bureau of Mines. US Report No. OFR 103 (3)-79, p 623
Yang Y, Zhang Q (1997) Analysis for the results of point load testing with artificial neural network. In: Proceedings of computer methods and advances in geomechanics, IACMAG, China, pp 607–612
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Khandelwal, M., Lalit Kumar, D. & Yellishetty, M. Application of soft computing to predict blast-induced ground vibration. Engineering with Computers 27, 117–125 (2011). https://doi.org/10.1007/s00366-009-0157-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-009-0157-y