
Abstract
The purpose of this paper is to investigate an extended KdV equation in (2+1)-dimensions which cannot be directly bilinearized. The equation contains many important integrable models as its special cases. On the basis of the exchange identities for Hirota’s bilinear operators and the existing research results, a bilinear Bäcklund transformation is presented for the extended equation. And then, associated with the obtained bilinear Bäcklund transformations, we derive a Lax pair and a modified equation in detail, which implies that the introduced equation is also integrable. Finally, two kinds of nonsingular rational solutions are generated from the nonlinear superposition formula and arbitrary travelling wave solutions. The first class of rational solutions shows us that the presented equation possesses a general class of lump solutions with negative coefficients of two second-order linear dispersion terms. The second class of nonsingular rational solutions is essentially travelling wave solutions due to special solution structures of the presented equation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It is known that the Kadomtsev–Petviashvili-I (KPI) equation
is a (2+1)-dimensional extension of the integrable Korteweg-de Vries (KdV) equation [1]. The KdV and KP equations are two of the most significant mathematical models which possess abundant exact solutions in nonlinear science. The integrable positive KP hierarchy associated with the Lax operator of the KPI Eq. (1.1) is introduced in Ref [2, 3]. The first four forms can be expressed as follows:
Note that third Eq. (1.2c) is just the KPI equation by setting \(t_3=t\), and fourth Eq. (1.2d) can be reduced to an equivalent expression of the normal KdV equation when \(y=x\). Besides, under the potential \(u=\phi _x\) and \(t_4=\frac{1}{24}t\), fourth Eq. (1.2d) is read as
which is named the (2+1)-dimensional Date–Jimbo–Kashiwara–Miwa (DJKM) equation [4, 5]. Because these two equations are the generalizations of the KdV equation in (2+1)-dimensions, a novel integrable KdV system
has been firstly constructed by Lou [6]. This equation is also called as the cKP3–4 equation, to reflect the combination of the third member and fourth member in the positive KP hierarchy. The Lax pair
and the dual Lax pair
have been proposed directly, which can indicate the integrability of the cKP3–4 Eq. (1.4). Furthermore, it has been found that the combined equation may possess soliton molecules and the missing D’Alembert-type solutions [6]. Some important properties such as the Painlevé property, Schwartz form and symmetry reductions for the cKP3–4 Eq. (1.4) have been discussed [7].
Motivated by these facts, we would like to investigate an extended form for the integrable cKP3–4 Eq. (1.4), written as
where \(a,b,c,\gamma\) and \(\delta\) are arbitrary real constants, which satisfy \(c\gamma (a^2+b^2)\ne 0\) to ensure the nonlinearity of the considered equation. By taking the choice
it is easy to see that the above form is just the cKP3–4 Eq. (1.4). For \(\delta \ne 0\), the considered model equation includes the KP equation and the (2+1)-dimensional DJKM equation as its special cases. For \(\delta = 0\), in the case
Equation (1.7) reduces to the (2+1)-dimensional generalized breaking soliton equation
which was firstly proposed by Xu and can pass the Painlevé test [8]. In particular, using the potential \(u=\phi _x\) and setting \(a=0, b=1,e=-2\), Eq. (1.10) transforms into the Bogoyavlenskii–Schiff (BS) equation, or named breaking soliton equation
which was introduced by Calogero and Degasperis [9]. This equation was also studies by Bogoyavlenskii and Schiff in different methods [10,11,12]. For all we know, the Painlevé property, integrability and various exact solutions of these two equations have been widely investigated [13,14,15,16,17,18,19]. For example, bilinear Bäcklund transformations, Lax pairs and infinitely many conservation laws have been constructed for the (2+1)-dimensional breaking soliton equation by using the binary Bell polynomial approach [20].
In various physical fields, the KP Eq. (1.1) is widely used to characterize the propagation of weakly dispersive and small amplitude waves in (2+1)-dimensions [1]. Besides, the breaking soliton Eq. (1.11) is a significant model to describe the (2+1)-dimensional interaction of a long wave propagating along the x-axis and a Riemann wave propagating along the y-axis [10, 11]. As an extended form of these two equations, we believe that the generalized Eq. (1.7) should have potential applications in many areas of nonlinear science. The extended form (1.7) can also be applied to physics as a way to model real (2+1)-dimensional shallow water waves due to the negative coefficients of two second-order linear dispersion terms.
As well-known, Hirota’s bilinear method is a pretty effective tool in the study of nonlinear integrable equations. Hirota bilinear forms play a crucial role in presenting exact solutions, particularly multi-soliton solutions. Most of nonlinear integrable equations can be written in bilinear forms. However, it was further found that some nonlinear evolution equations cannot be directly transformed into a bilinear form. For instance, the (2+1)-dimensional DJKM Eq. (1.3) does not possess a simple bilinear expression like the KdV equation in (1+1)-dimensions, and it has a trilinear form given by previous studies [4, 5, 21,22,23].
In this paper, we would like to study some integrable properties of the generalized Eq. (1.7) which can be given by a trilinear form instead of the bilinear form. The framework of this paper is as below. Firstly, a general multi-parameter bilinear Bäcklund transformation will be derived with the help of appropriate bilinear exchange formulas. The resulting bilinear Bäcklund transformation can be converted into the corresponding Lax pairs. Secondly, a generic class of lump solutions will be built from the existing nonlinear superposition formula when \(\delta <0\) to the extended nonlinear model Eq. (1.7). Our conclusions and remarks will be given in the last section.
2 Bilinear Bäcklund transformation and Lax pair
It is obvious that under the transformation
the extended form (1.7) can be given by
The trilinear Eq. (2.2) does not exist a direct bilinear form, whereas can be written as
where the Hirota bilinear differential operators are defined by
with \(n_1\) and \(n_2\) being arbitrary nonnegative integers [24].
In mathematical physics, bilinear Bäcklund transformations are significantly helpful to search for exact solutions to nonlinear equations, and they can connect with Lax pairs and construct the modified soliton equation [25,26,27,28,29,30,31]. In the following, let us present a bilinear Bäcklund transformation for the trilinear Eq. (2.3).
Theorem 2.1
Suppose that f and \(f'\) are two different solutions to the trilinear Eq. (2.3). Then, we have the following multi-parameter Bäcklund transformation to Eq. (2.3):
where \(\tilde{\delta } =\pm \sqrt{\delta }\), \(\lambda ,\mu\) are two arbitrary constants and \(\kappa (y,t)\) is an arbitrary function.
Proof
Let us first introduce a key function
By using the exchange identities (A.1)-(A.7) for Hirota’s bilinear operators in Appendix A in turn, \(P_1\) can be expressed as
\(\square\)
where we have applied (2.4a) in the above derivation. Let us second consider another key function
According to the bilinear Bäcklund transformation presented by Hu and Li [4, 5] for the (2+1)-dimensional DJKM Eq. (1.3) and using (2.42.4a), a similar direct computation leads to (see Appendix B for details)
Moreover, we have
Therefore, the system of bilinear equations (2.4) guarantees \(P_1+P_2=0.\) This shows that the system (2.4) presents a Bäcklund transformation for the trilinear Eq. (2.3).
We remark that if \(\tilde{\delta }=0\), the system (2.4) reduces to the Bäcklund transformations given in Refs. [8, 14] by choosing appropriate parameters. Next, we will derive a Lax pair for Eq. (1.7), based on the above bilinear Bäcklund transformation. Taking
and applying the following identities:
the bilinear Bäcklund transformation (2.4) can be transformed into the following system:
A direct computation shows that system (2.12) becomes
where
We can check that the compatibility condition \([L_1,L_2]=0\) of the above system generates Eq. (1.7), which means system (2.14) can be regarded as a Lax pair of Eq. (1.7).
For simplicity, in the following discussion of this section, we adopt \(\lambda =\mu =\kappa (y,t)=0\) in the bilinear Bäcklund transformation (2.4). It is easily checked that system (2.13) becomes
which is equivalent to the Lax pair (1.5) or the dual Lax pair (1.6) to the cKP3–4 equation, under the choice (1.8). By the dependent variable transformation
the bilinear Bäcklund transformation (2.4) can be transformed into the following coupled system:
where \(\tilde{\delta }=\pm \sqrt{\delta }.\) By eliminating \(\rho\) and then taking the derivative with respect to x at both ends of the resulting equation, the coupled system (2.17) yields
which can be regarded as a modified form of Eq. (1.7). In particular, setting \(\delta =0\) and introducing the new dependent variable \(\varpi\) by \(\varpi =\phi _x\), the corresponding modified equation is
which is called as the (2+1)-dimensional modified KdV-CBS equation [32] and can be reduced to the modified KdV equation in the case of \(y=x\).
In addition, since the left-hand side of (2.4a) may be written as
the bilinear equation \((\tilde{\delta }D_{y}+D_{x}^{2})f\cdot f'=0\) is equivalent to
by using the following related variable transformation
This shows that formula (2.21) connects the solution u of the extended KdV Eq. (1.7) and the solution \(\phi\) of Eq. (2.18).
3 Lump solutions with \(\delta \ne 0\)
Lump solutions are a kind of analytical rational solutions, which decay to zero in all directions in space. In particular, such solutions play a crucial role in revealing complex nonlinear phenomena in scientific fields such as nonlinear optics, ocean engineering, plasmas and fluid mechanics [33]. Hence, the study on the lump solution of nonlinear soliton equations can help us understand a variety of interesting phenomena and the related physical mechanisms in nature. It is reported that many kinds of methods can generate lump solutions, such as symbolic computations with Maple [21, 34,35,36,37], the long wave limit approach [22, 38, 39], the Hirota bilinear method and the use of nonlinear superposition formulae [25]. In this section, by using the nonlinear superposition formula associated with the bilinear Bäcklund transformation in Theorem 2.1, we would like to explore lump solutions for the extended KdV Eq. (1.7) with \(\delta \ne 0\). Now, let us set \(\lambda =0\) for convenience and rewrite (2.4) symbolically by \(f{\mathop {\rightarrow }\limits ^{\mu }}f'\). We have the following nonlinear superposition formula of Eq. (2.3):
Theorem 3.1
[4, 5, 40] Let \(f_{0}\) be a nonzero solution of Eq. (2.3) and assume that \(f_1\) and \(f_2\) are two nonzero solutions given by the bilinear Bäcklund transformation (2.4) such that \(f_{0}{\mathop {\rightarrow }\limits ^{\mu _{i}}}f_{i} (i=1,2)\). Then, \(f_{12}\) defined by
is a new solution to Eq. (2.3) which is interrelated to \(f_1\) and \(f_2\) under system (2.4) with parameters \(\mu _2\) and \(\mu _1\) , respectively. Here, \(\hat{c}\) is a nonzero real constant.
This theorem might be proved via a similar way to the one in the previous works [4, 5, 40]. Thus, we omit its proof in this paper.
In what follows, we take
where \(k _i, l_i, m_i, i=1, 2,\) are parameters to be determined, and \(\xi _i,\zeta _{i},i=1, 2,\) are arbitrary constants. By employing the bilinear Bäcklund transformation (2.4), we get
Applying Theorem 3.1 and choosing \(\hat{c}=\frac{2}{\mu _2-\mu _1}\) in (3.1), a new solution of Eq. (2.3) is presented as follows:
Upon selecting
and substituting (3.3) into (3.4), then \(f_{12}\) has the following form:
To establish lump solutions, we take
where the asterisk denotes the complex conjugate. Substituting (3.2), (3.3) and (3.7) into (3.6) generates the following class of rational solutions:
where \(r_3,d_3\) and d are given by
where \(r_1d_2-r_2d_1\ne 0\) and the other parameters involved are arbitrary. Clearly, the conditions
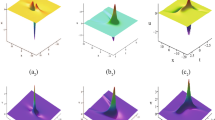
guarantee that the above class of function solutions is always positive. We remark that the class of function solutions reduces to the polynomial solutions of the extended bilinear second KP equation given by the long wave limit approach [22]. Under the constraint (3.10), the transformation (2.1) presents the following lump solutions to the extended form (1.7):
where \(f_{12}\) is defined by (3.8) and (3.9). Figures 1 and 2 exhibit three-dimensional plots and curves of the lump solutions (3.11) with choices of the involved parameters. We see that the lump solution u has a peak and two valleys, and decays algebraically in all directions in the (x, y)-plane.


It is worth noting that extended Eq. (1.7) may possess abundant solution structures. We can also see if the analytic function \(f=f(x,y,t)\) in expression (2.2) satisfies
then the function f solves the trilinear Eq. (2.2). Thus, the trilinear Eq. (2.2) has the following solutions in the form
where k is an arbitrary nonzero real constant, h is arbitrary and \(F(\eta )\) is an arbitrary function. As an example, let us consider a class of polynomial function solutions to the trilinear Eq. (2.2) in the form
where the real constants \(k_1\) and \(k_2\) satisfy \(k_1^2+ k_2^2\ne 0\), but the constants \(h_i, 1\le i \le 3,\) are all arbitrary. It is easy to observe that the solutions in (3.14) are positive if the parameter \(h_3>0\) holds, and so the transformation in (2.1) with (3.13) present the nonsingular rational solutions u and v for the extended Eq. (1.7):
where
Note that solution (3.15) is just a special case of the arbitrary travelling wave with
which needs to satisfy \(ab\ne 0\). Besides, this solution does not tend to zero in the direction \(x-ay/b-2a^3\delta t/cb^2= \mathrm {constant}\), which yields the plane lump solution from [41]. The three-dimensional plots and curves generated by nonsingular rational solution (3.15) with the specific parameters are made by using Maple plot tools in Figs. 3 and 4.

Profile of u in the lump solution (3.15) with parameters: \(k_1 = 1, k_2 = 2, h_1=1,h_2=2, h_3=5, a = -2, b = 1,c = -1,\gamma =1,\delta =-1, t = 1\): (a) 3D plot, (b) contour plot and (c) y-curves

4 Concluding remarks
In summary, some meaningful integrable properties of the extended Eq. (1.7) have been explored, by means of a trilinear form. We first have computed a bilinear Bäcklund transformation to Eq. (1.7), based on the exchange identities for Hirota’s bilinear operators and the existing research results. And then, associated with the obtained bilinear Bäcklund transformations, we have also derived a Lax pair and a modified equation to Eq. (1.7) in detail. Lastly, two kinds of nonsingular rational solutions have been generated from the nonlinear superposition formula and arbitrary travelling wave solutions. The first class of rational solutions shows us that Eq. (1.7) possesses a general class of lump solutions with \(\delta <0\), while the second class of nonsingular rational solutions is essentially travelling wave solutions due to special solution structures of Eq. (1.7).
We point out that the generalized Eq. (1.7) includes many important nonlinear soliton equations as its special cases, such as the DJKM equation, the BS equation, the extended second KP equation and the generalized breaking soliton equation [4,5,6, 8, 14, 21, 22]. It is extremely important in soliton theory to search for nonlinear integrable systems and investigate their integrable characteristics. On the one hand, our work extends the above-mentioned equations to a new one which possesses many interesting integrable properties. The compatibility condition \([L_1,L_2] = 0\) of the general system (2.14) can generate the corresponding integrable equation with the selection of coefficients a, b, c and \(\delta\), which provides new (2+1)-dimensional nonlinear integrable equations to describe nonlinear phenomena in mathematical physics. On the other hand, the presented result enriches the existing theory on lumps to nonlinear soliton equations, adding new examples of employing trilinear forms to search for lump solutions.
As far as we know, there is still a lot of work to do with Eq. (1.7), which is worth studying in depth. As Lou described in Ref. [6], some interesting exact solutions are also valid for the extended Eq. (1.7) with \(\delta \ne 0\), such as soliton molecule solutions and the D’Alembert-type solutions [6, 42,43,44,45]. Moreover, recent works exhibit that many (2+1)-dimensional nonlinear equations possess interaction solutions between lump or lump-type solutions and other kinds of exact solutions [36]. Therefore, it is meaningful for the extended Eq. (1.7) to look for interaction solutions including lump-kink interaction solutions and lump-soliton interaction solutions [46]. Another interesting work is to investigate Hirota N-soliton conditions [47,48,49] and linear superposition solutions [50] to the introduced Eq. (1.7), which will be carried out in our future research.
Data Availability
All data supporting the findings of this study are included in this published article.
References
B.B. Kadomtsev, V.I. Petviashvili, Sov. Phys. Dokl. 15, 539 (1970)
S.Y. Lou, J. Phys. A Math. Gen. 26, 4387 (1993)
W.X. Ma, J. Phys. A Math. Gen. 25, 5329 (1992)
X.B. Hu, Y. Li, Acta Math. Sci. 11, 164 (1991) (in Chinese)
X.B. Hu, Y. Li, J. Grad. Sch. USTC 6, 8 (1989) (in Chinese)
S.Y. Lou, China Phys. B 29, 080502 (2020)
X.B. Wang, M. Jia, S.Y. Lou, China Phys. B 30(1), 010501 (2021)
G.Q. Xu, Appl. Math. Lett. 50, 16 (2015)
F. Calogero, A. Degasperis, Nuovo Cimento B 32, 201 (1976)
O.I. Bogoyavlenskii, Math. USSR Izv. 34, 245 (1990)
O.I. Bogoyavlenskii, Math. USSR Izv. 36, 129 (1991)
J. Schiff, Painlevé Transendents, Their Asymptotics and Physical Applications (Plenum Press, New York, 1992), p. 393
A.M. Wazwaz, Phys. Scr. 81, 035005 (2010)
X. Lü, W.X. Ma, C.M. Khalique, Appl. Math. Lett. 50, 37 (2015)
S.Y. Lou, H.Y. Ruan, Commun. Theor. Phys. 26, 51 (1996)
X.L. Yong, Z.Y. Zhang, Y.F. Chen, Phys. Lett. A 372, 6273 (2008)
Z.Y. Yan, H.Q. Zhang, Comput. Math. Appl. 44, 1439 (2002)
S.J. Yu, K. Toda, N. Sasa, T. Fukuyama, J. Phys. A Math. Gen. 31, 3337 (1998)
Y.T. Gao, B. Tian, Comput. Math. Appl. 30, 97 (1995)
E.G. Fan, K.W. Chow, J. Math. Phys. 52, 023504 (2011)
W.X. Ma, L.Q. Zhang, Pramana J. Phys. 94, 43 (2020)
L. Cheng, Y. Zhang, W.X. Ma, J.Y. Ge, Math. Comput. Simulation 187, 720 (2021)
S.J. Yu, K. Toda, T. Fukuyama, J. Phys. A Math. Gen. 31(50), 10181 (1998)
R. Hirota, The Direct Method in Soliton Theory (Cambridge University Press, Cambridge, 2004)
X.B. Hu, H.W. Tam, J. Nonlinear Math. Phys. 8, 149 (2001)
W.X. Ma, A. Abdeljabbar, Appl. Math. Lett. 25, 1500 (2012)
X. Lü, Y.F. Hua, S.J. Chen, X.F. Tang, Commun. Nonlinear Sci. Numer. Simul. 95, 105612 (2021)
S.J. Chen, W.X. Ma, X. Lü, Commun. Nonlinear Sci. Numer. Simul. 83, 105135 (2020)
P.F. Han, T. Bao, Nonlinear Dyn. 108, 2513 (2022)
P.F. Han, T. Bao, Eur. Phys. J. Plus 137, 216 (2022)
X.J. He, X. Lü, M.G. Li, Anal. Math. Phys. 11, 4 (2021)
Y.H. Wang, H. Wang, Nonlinear Dyn. 89, 235 (2017)
M.J. Ablowitz, P.A. Clarkson, Solitons, Nonlinear Evolution Equations and Inverse Scattering (Cambridge University Press, Cambridge, 1991)
W.X. Ma, S. Manukure, H. Wang, S. Batwa, Mod. Phys. Lett. B 35, 2150160 (2021)
J.W. Xia, Y.W. Zhao, X. Lü, Commun. Nonlinear Sci. Numer. Simul. 90, 105260 (2020)
X. Lü, S.J. Chen, Nonlinear Dyn. 103, 947 (2021)
Y. Zhou, S. Manukure, M. Mcanally, J. Geom. Phys. 167, 104275 (2021)
J. Satsuma, M.J. Ablowitz, J. Math. Phys. 20, 1496 (1979)
L. Cheng, Y. Zhang, W.X. Ma, J.Y. Ge, Eur. Phys. J. Plus 135, 379 (2020)
X.B. Hu, J. Phys. A Math. Gen. 30, 8225 (1997)
X.L. Yong, Y.N. Chen, Y.H. Huang, W.X. Ma, East Asian J. Appl. Math.10, 420 (2020)
Q.L. Zhao, S.Y. Lou, M. Jia, Commun. Theor. Phys. 72, 085005 (2020)
S.Y. Lou, J. Phys. Commun. 4, 041002 (2020)
M. Jia, S.Y. Lou, Chaos. Solitons and Fractals 140, 110135 (2020)
Z.W. Yan, S.Y. Lou, Commun. Nonlinear Sci. Numer. Simul. 91, 105425 (2020)
P.F. Han, T. Bao, Eur. Phys. J. Plus 136, 925 (2021)
W.X. Ma, Partial Differ. Equ. Appl. Math. 5, 100220 (2022)
W.X. Ma, Math. Comput. Simulation 190, 270 (2021)
W.X. Ma, X.L. Yong, X. Lü, Wave Motion 103, 102719 (2021)
P.F. Han, Y. Zhang, Nonlinear Dyn. 109, 1019 (2022)
Acknowledgements
The authors express their sincere thanks to the Referees and Editors for their valuable comments. This work is supported by the National Natural Science Foundation of China (No.51771083) and Jinhua Polytechnic Key Laboratory of Crop Harvesting Equipment Technology of Zhejiang Province.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendices
Appendix A
We list the following relevant exchange identities for Hirota’s bilinear operators, which come from the general exchange formula (see [24] for details):
Appendix B
By applying (A.1), (A.2), (A.3), (A.5), (2.4a), (A.6), (A.8), (A.5), (A.4), (A.5), (A.9), (A.8), (2.4a), (A.5), (A.4) and (A.8) in Appendix A in turn, expression (2.8) is derived as follows:
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Cheng, L., Ma, W.X., Zhang, Y. et al. Integrability and lump solutions to an extended (2+1)-dimensional KdV equation. Eur. Phys. J. Plus 137, 902 (2022). https://doi.org/10.1140/epjp/s13360-022-03076-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-022-03076-w