
Abstract
Active researches on the water waves have been done, and water waves are essentially complex waves controlled by gravity field and surface tension. Using the Hirota bilinear method, two bilinear auto-Bäcklund transformations of the extended (3+1)-dimensional shallow water wave equation are derived explicitly. The hyperbolic cosine-function solution and cosine-function solution are obtained by means of bilinear auto-Bäcklund transformations. Five linear superposition formulas of this equation are given and proved. All the results depend on the coefficients of the equation and the linear superposition relationship. Thereafter, we perform a numerical simulation to trace and study the dynamical behaviors of the linear superposition solutions via their three-dimensional profiles using symbolic calculation system Mathematica codes.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Shallow water wave equations have been considered as the models in which the depth of the water is much smaller than the wave length of the disturbance of the free surface [1, 2]. Shallow water wave equations are one of the important models of nonlinear evolution equations (NLEEs), which are widely used in mathematical physics [3, 4]. For instance, the acoustic problem of wave propagation in discontinuous media [3]. The horizontal velocity and the height away from the equilibrium position of water waves depend on the dispersion power of sea water waves [4]. In order to better understand the physical mechanism of natural phenomena described by NLEEs [5,6,7,8], it is particularly important to analyze the analytical solutions of NLEEs [9,10,11]. There exist many significant methods to find the analytical solutions of NLEEs, including tanh function and the sine-cosine method [12], variable-coefficient three-wave approach [13], Darboux transformation [14,15,16], Bäcklund transformation [17, 18], bilinear neural network method [19, 20], multiple exp-function method [21, 22], Lie group method [23,24,25,26,27], Hirota bilinear method [28,29,30] and many others.
A new extended (3+1)-dimensional shallow water wave equation [31] is introduced by Wazwaz as follows:
where \(u=u(x,y,z,t)\) is a function of the three scaled spatial variables x, y, z and the temporal variable t, with \(\lambda _{1},\lambda _{2},\lambda _{3}\) and \(\lambda _{4}\) are constants. Equation (1) is used to simulate the dynamic behaviors of water wave propagation in oceanography and atmospheric science. It is proved that the extended terms do not destroy the integrability of Eq. (1). Painlevé analysis was performed on Eq. (1) and the compatibility conditions were checked. Multiple soliton solutions and lump solutions of Eq. (1) are formally derived. The effects caused by the extended terms were obvious on the dispersion relations and the phase shifts as well [31]. Special cases of Eq. (1) have been investigated as follows:
-
(1)
Setting \(\partial _{y}=\partial _{x},\psi =-u_{x},\lambda _{1}=\lambda _{2}=\lambda _{3}=\lambda _{4}=0\) in Eq. (1) gives the famous Korteweg-de Vries (KdV) equation [32]
$$\begin{aligned} \begin{aligned} \psi _{t}+\psi _{xxx}+6\psi \psi _{x}=0. \end{aligned} \end{aligned}$$(2)KdV equation describing the long waves in shallow water under the gravity, waves in a nonlinear lattice, ion-acoustic and magneto-acoustic waves in a plasma [32].
-
(2)
When we restrict u to being z-independent and \(\lambda _{4}=0\). Equation (1) has been reduced to the extended (2+1)-dimensional shallow water wave equation with constant coefficients [31]
$$\begin{aligned} \begin{aligned}&u_{yt}+u_{xxxy}-3u_{xx}u_{y}-3u_{x}u_{xy}+\lambda _{1}u_{xx}\\&\quad +\lambda _{2}u_{yy}+\lambda _{3}u_{xy}=0. \end{aligned} \end{aligned}$$(3)Equation (3) is used to simulate the dynamic behaviors of water wave propagation in oceanography and atmospheric science. The integrability of Eq. (3) is studied by Painlevé analysis method, and multiple soliton solutions and lump solutions are obtained [31].
-
(3)
When we restrict u to being z-independent and \(\lambda _{2}=\lambda _{4}=0\). Equation (1) has been reduced to the (2+1)-dimensional extended shallow water wave equation [33]
$$\begin{aligned}&u_{yt}+u_{xxxy}-3u_{xx}u_{y}-3u_{x}u_{xy}\nonumber \\&\quad +\lambda _{1}u_{xx}+\lambda _{3}u_{xy}=0. \end{aligned}$$(4)Equation (4) simulates the nonlinear waves in shallow water and the (2+1)-dimensional interaction of the Riemann wave propagating along the y-axis and a long wave propagating along the x-axis in plasma physics and weakly dispersive media. By applying the long wave limit method to the N-soliton solutions, the multiple lump solutions of Eq. (4) are gained [33].
-
(4)
When we restrict u to being z-independent and \(\lambda _{1}=\lambda _{2}=\lambda _{3}=\lambda _{4}=0\). Equation (1) has been reduced to the (2+1)-dimensional Boiti-Leon-Manna-Pempinelli equation [34]
$$\begin{aligned} \begin{aligned} u_{yt}+u_{xxxy}-3u_{xx}u_{y}-3u_{x}u_{xy}=0. \end{aligned} \end{aligned}$$(5)Equation (5) describes the interaction of a Riemann wave propagating along the y-axis and a long wave propagating along the x-axis in a fluid. Some exact solutions of Eq. (5) are obtained, including kinky periodic solitary-wave solutions, periodic soliton solutions and kink solutions [34].
Many studies have revealed that nonlinear waves will exhibit more complex and fascinating dynamic characters, as the spatial dimension of system increases [35,36,37,38]. For linear systems, different linear superposition forms produce generalized solutions of linear problems. Linear superposition has an impact on the applications of nonlinear models in the real world, but the principle of linear superposition can be applied to some specific nonlinear models [39]. Specifically, it is transformed into bilinear form, and its characteristics are used to study the linear superposition solutions. In several areas of applied science and ocean engineering, investigations of superposition solutions have been played a vital role for demonstrating wave character of nonlinear problems [40]. The innovation of this paper lies in the construction of several formulas of new types of superposition solutions, which are proved to be valid under superposition relations. The trajectories and dynamic evolution of some superimposed solutions are analyzed in detail. The analysis of its properties is closer to the real physical phenomena in complex environment.
The paper is synchronized in the following manner: Section 2 deals with the bilinear form in order to obtain two bilinear auto-Bäcklund transformations of Eq. (1). The hyperbolic cosine-function solution and cosine-function solution are obtained by means of bilinear auto-Bäcklund transformations. In Sect. 3, we give and prove three superposition solutions for Eq. (1), including exponential function superposition solutions, trigonometric function superposition solutions, hybrid solution among trigonometric functions and exponential functions. In Sect. 4, we study the superposition formulas of two kinds of function product solutions, which are exponential function product type superposition solutions and trigonometric function product type superposition solutions. The derived results are studied with the aid of graphics. At last, Sect. 5 ends with the concluding remarks of the findings.
2 Bilinear auto-Bäcklund transformations
To study the bilinear auto-Bäcklund transformations, we need to get the bilinear form for Eq. (1) at first. Under the dependent variable transformation
where f is a real function of x, y, z and t, \(u_{0}(z,t)\) is an undetermined function of z and t. Equation (1) has been converted into the following bilinear form
with R(x, y, z, t), F(x, y, z, t) are real functions with respect to variables x, y, z and t, where \(D_{x}\), \(D_{y}\), \(D_{z}\), \(D_{t}\) are the bilinear operators defined by Hirota [41]
with \(n_{1}\), \(n_{2}\), \(n_{3}\) and \(n_{4}\) being the non-negative integers. Suppose there is another solution g to bilinear form (7)
where g is a real function of x, y, z and t. In order to search for certain bilinear auto-Bäcklund transformations between the solutions f and g of bilinear form (7) for Eq. (1), consider the following form
We use the exchange identities of the following Hirota bilinear operators [41]
with
and
Selecting different exchange identities for the Hirota bilinear operator, we get two different types of bilinear auto-Bäcklund transformations and soliton solutions for Eq. (1) as follows:
Case I Substituting expressions (11) and (12) into Eq. (10) and assuming that
we derive that
with \(\rho _{1}\) is the real constant. Taking \(P_{1}=0\), the decoupling of Eq. (15) gives rise to an alternative bilinear auto-Bäcklund transformation for Eq. (1) as
We select \(f=1\) as a solution for bilinear form (7) and solve bilinear auto-Bäcklund transformation (16) to obtain the following equations
Assuming that \(g=\cosh (a_{1}x+b_{1}y+c_{1}z+d_{1}t)\) and solving Eq. (17), we get the parameters relationship in solution g as follows:
where \(a_{1},b_{1},c_{1}\) and \(d_{1}\) are the real constants. Thus, the corresponding hyperbolic cosine-function solution for Eq. (1) is
Case II Substituting expressions (11) and (13) into Eq. (10) and supposing that
we can derive
where \(\rho _{2}\) is the real constant. Taking \(P_{2}=0\), it is concluded that the second bilinear auto-Bäcklund transformation associated with Eq. (1) can be constructed as
Taking \(f=1\) as a solution for bilinear form (7) and solving bilinear auto-Bäcklund transformation (22), we get
Assuming that \(g=\cos (a_{2}x+b_{2}y+c_{2}z+d_{2}t)\) and solving Eq. (23), we obtain the parameters relationship in solution g as follows:
Thus, the corresponding cosine-function solution for Eq. (1) is
Bilinear auto-Bäcklund transformation is an effective algorithm for solving NLEEs, and it turns the problem of solving equations into pure algebraic operation [42, 43]. It can be seen that the two kinds of bilinear auto-Bäcklund transformations (16) and (22) are obtained through different exchange identities, and the process of applying bilinear auto-Bäcklund transformation to solve the analytical solutions is the same. With the help of two kinds of bilinear auto-Bäcklund transformations, the hyperbolic cosine-function solution (19) and cosine-function solution (25) are obtained by assuming different forms of solutions. Similarly, it can be assumed that there are different forms of solutions, and then the parameters relationship can be given by using bilinear auto-Bäcklund transformation. Therefore, the method provides an effective idea for solving the analytical solutions of various NLEEs.
3 Linear superposition formula of solutions
It is well known that for the physical systems frequently characterized by NLEEs, there is no linear superposition formula of solutions. At present, the corresponding nonlinear superposition formula is given by means of Bäcklund transformation method [44]. Based on the Hirota bilinear method, bilinear neural network framework expands to more than one hidden layer to construct test functions [45]. By using the symbolic computation software Maple, periodic-type I, II, and III solutions of the new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation are obtained [45]. Starting from the potential forms constructed by the mastersymmetry approach, the special decompositions and some linear superpositions of the BKP hierarchy and the dispersionless BKP hierarchy are analyzed [46]. The above methods provide some feasible ideas for constructing the linear superposition formula of solutions.
3.1 Linear superposition formula of exponential function type
Firstly, we assume the new test functions of multiple exponential functions, hyperbolic cosine functions and hyperbolic sine functions.
where \(k_{i},\alpha _{i},\beta _{i},\gamma _{i},\omega _{i}\) are all the real constants, N is a positive integer.
Theorem
Assuming that the exponential test functions \(f_{A1}\), \(f_{A2}\) and \(f_{A3}\) (26) are solutions of bilinear form (7), one of the following four linear superposition relationships must be satisfied:
Proof
By employing the properties of D-operator, substituting the exponential test functions (26) and the linear superposition relationship (27) into bilinear form (7), we have
then the exponential test functions \(f_{A1}\), \(f_{A2}\) and \(f_{A3}\) (26) are solutions of bilinear form (7). Similarly, the linear superposition relationships (28), (29) and (30) are true. Therefore, these linear superposition relationships are sufficient for the existence of solutions in bilinear form (7). One can directly prove this theorem. \(\square \)
Substituting relational formula \(f_{A1}\) (26) and the linear superposition relationship (30) into transformation (6), the N-order hyperbolic cosine function superposition solutions of Eq. (1) can be obtained.
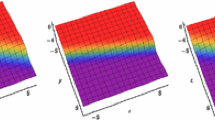
Numerical simulations are performed to illustrate the properties of N-order hyperbolic cosine function superposition solutions through graphical forms. By setting N = 3 in N-order hyperbolic cosine function superposition solutions (32), the three-dimensional dynamic graphs of interaction between peaked soliton and two bending kink waves are successfully depicted in Fig. 1. Figure 1 is plotted by considering arbitrary constants as \(\lambda _{1}=\lambda _{2}=1,\lambda _{3}=\lambda _{4}=-1,k_{1}=\beta _{1}=1.5,k_{2}=2,k_{3}=1,\beta _{2}=-0.3, \beta _{3}=-1.5,\omega _{1}=-0.5,\omega _{2}=-1.2,\omega _{3}=1.8\) and function as \(u_{0}(z,t)=4{{\mathrm{sech}}}(\frac{1}{2}z^{2}+\frac{1}{2}t^{2})\) in 3-order hyperbolic cosine function superposition solutions (32). Figure 1 shows the interaction phenomenon of splitting into two bending kink waves due to the collision between two kink waves and the peaked soliton. With the increase of parameter x and the decrease of parameter y, two kink waves move along the positive direction of the z axis and collide with the peak soliton. It can be seen from Fig. 1b that the collision leads to the reduction of the peak value of the peaked soliton, and the two kink waves are split into two bending kink waves. When the parameters continue to change, the bending length of one of the bending kink waves gradually increases, and the peak of the peaked soliton cannot be recovered as shown in Fig. 1c. It also means that waves can constructively or destructively interfere under the effect of linear superposition.

(Color online) Interaction between the peaked soliton and two kink waves via N-order hyperbolic cosine function superposition solutions (32). a x = 2, y = 6, b x = 6, y = 2, and c x = 10, y \(=-\)2
Substituting relational formula \(f_{A3}\) (26) and the linear superposition relationship (27) into transformation (6), the N-order exponential function superposition solutions of Eq. (1) can be obtained.
Figure 2 demonstrates the intensity distribution of the N-order exponential function superposition solutions (33) under the conditions N = 4. The corresponding parameters in Fig. 2 are \(\lambda _{1}=\lambda _{2}=1,\lambda _{3}=\lambda _{4}=-1,k_{1}=k_{2}=1, k_{3}=k_{4}=2,\alpha _{1}=-1.3,\alpha _{2}=-0.1,\gamma _{1}=-1,\gamma _{2}=0.8,\alpha _{3}=1.6,\gamma _{3}=-0.3,\alpha _{4}=0.2,\gamma _{4}=-0.8, u_{0}(z,t)=\tanh (z)\). With the increase of parameter t and the decrease of parameter y, three adjacent kink waves advance at a certain angle along the positive direction of z-axis and the negative direction of x-axis. When parameter y and parameter t are equal, three adjacent kink waves collide with one kink wave, resulting in the fission of three kink waves. Then, three kink waves split into two kink waves and the distance is getting farther and farther. This process shows that the deformation of multiple waves cannot be recovered due to their collision, but their amplitude has not changed. Similarly, more kinds of exponential function type solutions can be obtained by means of relational formula (26) and the linear superposition relationships (27), (28), (29), (30), which are omitted here.

(Color online) Interaction between three kink waves and one kink wave via N-order exponential function superposition solutions (33). a y = 8, t = 0, b y = t = 4, and c y = 0, t = 8
N-order hyperbolic cosine function superposition solutions (32) and N-order exponential function superposition solutions (33) are all analytical solutions. Figures 1 and 2 analyze the collision between kink waves and peaked soliton, as well as the collision between multiple kink waves. Kink waves are produced by the collision of water waves, which is very helpful to the study of water wave interaction [47].
3.2 Linear superposition formula of trigonometric function type
In this subsection, we choose the new test functions of multiple cosine functions and sine functions.
where \(h_{j},m_{j},n_{j},p_{j},q_{j}\) are all the real constants, M is a positive integer.
Remark 3.1
Assuming that the trigonometric test functions \(f_{B1}\) and \(f_{B2}\) (34) are solutions of bilinear form (7), it is necessary to meet one of the following four constraint conditions:
Substituting relational formula \(f_{B1}\) (34) and the linear superposition relationship (35) into transformation (6), corresponding M-order cosine function superposition solutions of Eq. (1) appear as
Similarly, more kinds of trigonometric function type solutions can be obtained by means of relational formula (34) and the constraint conditions (35), (36), (37), (38), which are omitted here.
3.3 Linear superposition formula of trigonometric function and exponential function type
Select the test functions formed by the combination of three exponential function types (26) and two trigonometric function types (34). Assume that the six superposition solutions of bilinear form (7) are as follows
where \(k_{i},\alpha _{i},\beta _{i},\gamma _{i},\omega _{i},h_{j},m_{j},n_{j},p_{j},q_{j}\) are all the real constants, N and M are positive integers.
Remark 3.2
The superposition solutions \(f_{Ci}(i=1,2,3,4,5,6)\) (40) are composed of exponential functions \(f_{A1},f_{A2},f_{A3}\) (26) and trigonometric functions \(f_{B1},f_{B2}\) (34). Then \(f_{Ci}(i=1,2,3,4,5,6)\) (40) are solutions of bilinear form (7), which must satisfy the linear superposition relationships (27), (28), (29), (30) and (35), (36), (37), (38). There are 16 kinds of superposition relations, we only choose the following two cases and the rest are omitted.
Substituting relational formula \(f_{C1}\) (40) and the linear superposition relationship (41) into transformation (6), corresponding hybrid solution between N-order hyperbolic cosine functions and M-order cosine functions of Eq. (1) appear as
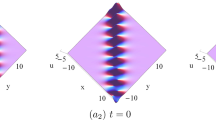
By setting N = M = 2 and considering the parameters \(\lambda _{1}=\lambda _{2}=1,\lambda _{3}=\lambda _{4}=-1,k_{1}=k_{2}=1,h_{1}=2,h_{2}=-3, \beta _{1}=0.27,\omega _{1}=-1.4,\beta _{2}=1.6,\omega _{2}=0.6,m_{1}=-0.5,p_{1}=-0.2,m_{2}=1.4,p_{1}=0.2,u_{0}(z,t)=0.1\) in hybrid solution between N-order hyperbolic cosine functions and M-order cosine functions (43). The localized characteristics and energy distribution of interaction between two rogue waves and two kink waves are shown clearly in Fig. 3. The rogue wave consists of an upward peak and a downward valley. As parameters y and t change, two rogue waves generated by the collision of two kink waves move at a certain angle along the negative direction of x axis and the positive direction of z axis. It can be seen from Fig. 3b that the amplitude of two rogue waves decreases with the change of parameters y and t. Subsequently, the shape of two rogue waves and two kink waves does not change and the amplitude changes as shown in Fig. 3c.

(Color online) Interaction between two rogue waves and two kink waves via hybrid solution between N-order hyperbolic cosine functions and M-order cosine functions (43). a y = 10, t \(= -\)2, b y = 6, t = 2, and c y = 2, t = 6

(Color online) Interaction between breather wave and two bell-shaped waves via hybrid solution among N-order exponential functions and M-order cosine functions (44). a x \(= -\)4, y = 12, b x = y = 4, and c x = 12, y \(=-\) 4
Substituting auxiliary function \(f_{C5}\) (40) and the linear superposition relationship (42) into transformation (6), corresponding hybrid solution among N-order exponential functions and M-order cosine functions of Eq. (1) appear as
Derived result of hybrid solution among N-order exponential functions and M-order cosine functions (44) at N = 2, M = 1 and \(\lambda _{1}=\lambda _{2}=1,\lambda _{3}=\lambda _{4}=-1,k_{1}=1,k_{2}=h_{1}=1.5,\alpha _{1}=0.5,\alpha _{2}=-0.5,\gamma _{1}=-2,\gamma _{2}=2, n_{1}=0.3,q_{1}=1.5,u_{0}(z,t)={{\mathrm{sech}}}(t^{2}+z)+{{\mathrm{sech}}}(t^{2}-z)\) reveals interaction between breather wave and two bell-shaped waves profile. It is obvious from Fig. 4 that the breather wave is composed of two adjacent humps with periodicity on both sides of the horizontal plane, two bell-shaped waves intersect to form a bright soliton. As the parameters x and y change, the breather wave moves along the positive direction of the z-axis, and its amplitude decreases after colliding with the bright soliton.
Hybrid solution between N-order hyperbolic cosine functions and M-order cosine functions (43), hybrid solution among N-order exponential functions and M-order cosine functions (44) are all analytical solutions. Figures 3 and 4 analyze the interaction between rogue waves and kink waves, as well as the interaction between breather wave and bell-shaped waves. The mechanism of rogue waves can be regarded as the high-amplitude waves generated by the collision of multi-solitons [48, 49]. It rises from an approximately constant background plane before reaching the maximum amplitude, and then gradually drops back the initial background plane [50]. Since the center of gravity of water waves fluctuates up and down, the results show that periodic waveform, the constructed bell-shaped waves and breather waves can help better understand the hydrodynamics of water waves in ocean engineering [51].
4 Linear superposition formula of function product type
This section mainly introduces two kinds of function product superposition theorems, including exponential function product superposition solutions and trigonometric function product superposition solutions.
4.1 Linear superposition formula of exponential function product type
In this subsection, we choose the new test functions which are composed of the product of exponential functions, hyperbolic cosine functions and hyperbolic sine functions.
where \(k_{i},a_{i},b_{i},c_{i},d_{i},e_{i},g_{i},r_{i},s_{i}\) are all the real constants, N is a positive integer.
Remark 4.1
Assuming that the exponential product test functions \(f_{D1},f_{D2},f_{D3},f_{D4},f_{D5}\) and \(f_{D6}\) (45) are solutions of bilinear form (7), one of the following four linear superposition relationships must be satisfied:
Substituting auxiliary function \(f_{D1}\) (45) and the linear superposition relationship (46) into transformation (6), corresponding N-order cosh\(\times \)cosh function solutions of Eq. (1) appear as
For the N-order cosh\(\times \)cosh function solutions (50) with N = 2, the three-dimensional dynamic graphs of 2-order cosh\(\times \)cosh function solutions are successfully depicted in Fig. 5. Figure 5 is plotted by taking arbitrary parameters as \(\lambda _{1}=\lambda _{2}=1,\lambda _{3}=\lambda _{4}=-1,k_{1}=k_{2}=1,a_{1}=-0.7,a_{2}=0.9,c_{1}=0.5,c_{2}=r_{1}=2,e_{1}=-0.3,e_{2}=-0.7,r_{2}=-1.2, u_{0}(z,t)=0\). With the increase of parameter y and the decrease of parameter t, four bending kink waves collide with each other and their shapes change. Figure 5b shows that four bending kink waves are fused into two kink waves under extrusion. Then, four bending kink waves split under mutual collision and the amplitude did not change in the whole process. Using relational formulas (45) and the linear superposition relationships (47), (48), (49), we can obtain another exponential product superposition solutions for Eq. (1). Here, we omit them.

(Color online) Interaction between four bending kink waves via N-order cosh\(\times \)cosh function solutions (50). a y = 1, t = 7, b y = 5, t = 3, and c y= 9 , t\(=-\)1
4.2 Linear superposition formula of trigonometric function product type
Here, we assume the new test functions which are composed of the product of cosine functions and sine functions.
where \(h_{j},\alpha _{j},\beta _{j},\gamma _{j},\omega _{j},m_{j},n_{j},p_{j},q_{j}\) are all the real constants, M is a positive integer.
Remark 4.2
Assuming that the trigonometric product test functions \(f_{E1},f_{E2}\) and \(f_{E3}\) (51) are solutions of bilinear form (7), it is necessary to meet one of the following four constraint conditions:
Substituting auxiliary function \(f_{E1}\) (51) and the linear superposition relationship (52) into transformation (6), corresponding M-order cos\(\times \)cos function solutions of Eq. (1) appear as
Using relational formulas (51) and the linear superposition relationships (53), (54), (55), we can obtain another trigonometric product superposition solutions for Eq. (1). Here, we do not propose this part. It is essential to investigate the behavior of waves in nonlinear sciences. Therefore, we analyze some linear superposition solutions given by Eqs. (32), (33), (43), (44) and (50). Through the symbolic calculation system Mathematica and selecting appropriate parameters for numerical simulation, the properties of the evolution profiles of these wave expressions are studied. The results are helpful to the study of shallow water waves and provide a new way to explain the physical properties of nonlinear phenomena.
5 Conclusion
It is generally believed that waves play a pervasive role in nature. The formation and propagation of waves have important applications in water waves, seismic waves, gravitational waves and mechanical waves. With the help of symbolic computation, we have studied the extended (3+1)-dimensional shallow water wave equation in this work. Through the Hirota bilinear method, two kinds of bilinear auto-Bäcklund transformations are given and two different types of solutions are obtained, including the hyperbolic cosine-function solution and cosine-function solution. Through the homoclinic test method, five kinds of linear superposition formulas are given. However, according to the particularity of undetermined coefficients in Eq. (1), this method cannot be applied to all NLEEs. The results obtained by this method have important practical significance for explaining the nonlinear physical phenomena of some important models.
The interactions of different types of superposition solutions are studied by means of three-dimensional diagram. Figure 1 shows the interaction phenomenon of splitting into two bending kink waves due to the collision between two kink waves and the peaked soliton. One can evidently observe from Fig. 2 that the collision between three adjacent kink waves and one kink wave leads to the splitting of three kink waves into two bending kink waves. Figure 3 exhibits the interaction phenomenon of two kink waves colliding with each other to generate two rogue waves. The interaction phenomenon of bright soliton generated by the intersection of breather wave and two bell-shaped waves are found from Fig. 4. The interaction phenomenon of collision and fusion of four bending kink waves as shown in Fig. 5.
Our findings confirm the existence of some possible special linear superposition solutions in nonlinear systems and add the richness of analytical solutions. In the future work, the generalized bilinear form is obtained based on the generalized bilinear differential operators [52], and then some new linear superposition solutions are studied. With the help of the physics-informed neural networks [53] and bilinear neural network method [54], the diversity of analytical solutions can be enriched. The existence of these linear superposition solutions in nonlinear systems provides a new idea for us to analyze nonlinear phenomena. Naturally, we hope that the linear superposition principle can find different types of superposition solutions as much as possible, so as to enrich our understanding of nonlinear systems.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Gao, X.Y., Guo, Y.J., Shan, W.R.: Long waves in oceanic shallow water: symbolic computation on the bilinear forms and Bäcklund transformations for the Whitham-Broer-Kaup system. Eur. Phys. J. Plus 135, 689 (2020)
Shen, Y., Tian, B., Liu, S.H.: Solitonic fusion and fission for a (3+1)-dimensional generalized nonlinear evolution equation arising in the shallow water waves. Phys. Lett. A 405, 127429 (2021)
Muñoz, J.C., Ruzhansky, M., Tokmagambetov, N.: Wave propagation with irregular dissipation and applications to acoustic problems and shallow waters. J. Math. Pures Appl. 123, 127–147 (2019)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Beholding the shallow water waves near an ocean beach or in a lake via a Boussinesq-Burgers system. Chaos Solitons Fractals 147, 110875 (2021)
Osman, M.S., Machado, J.A.T.: New nonautonomous combined multi-wave solutions for (2+1)-dimensional variable-coefficients KdV equation. Nonlinear Dyn. 93(2), 733–740 (2018)
Wang, X., Wei, J.: Antidark solitons and soliton molecules in a (3+1)-dimensional nonlinear evolution equation. Nonlinear Dyn. 102, 363–377 (2020)
Zhang, R.F., Li, M.C., Yin, H.M.: Rogue wave solutions and the bright and dark solitons of the (3+1)-dimensional Jimbo-Miwa equation. Nonlinear Dyn. 103, 1071–1079 (2021)
Chen, S.J., Lü, X.: Lump and lump-multi-kink solutions in the (3+1)-dimensions. Commun. Nonlinear Sci. Numer. Simul. 109, 106103 (2022)
Manafian, J., Ilhan, O.A., Avazpour, L., Alizadeh, A.: N-lump and interaction solutions of localized waves to the (2+1)-dimensional asymmetrical Nizhnik-Novikov-Veselov equation arise from a model for an incompressible fluid. Math. Meth. Appl. Sci. 43, 9904–9927 (2020)
Osman, M.S.: On multi-soliton solutions for the (2+1)-dimensional breaking soliton equation with variable coefficients in a graded-index waveguide. Comput. Math. Appl. 75(1), 1–6 (2018)
Lü, X., Chen, S.J.: New general interaction solutions to the KPI equation via an optional decoupling condition approach. Commun. Nonlinear Sci. Numer. Simul. 103, 105939 (2021)
Wazwaz, A.M.: The Camassa-Holm-KP equations with compact and noncompact travelling wave solutions. Appl. Math. Comput. 170, 347–360 (2005)
Liu, J.G., Zhu, W.H., Zhou, L.: Breather wave solutions for the Kadomtsev-Petviashvili equation with variable coefficients in a fluid based on the variable-coefficient three-wave approach. Math. Meth. Appl. Sci. 43(1), 458–465 (2020)
Wang, X., Wang, L.: Darboux transformation and nonautonomous solitons for a modified Kadomtsev-Petviashvili equation with variable coefficients. Comput. Math. Appl. 75(12), 4201–4213 (2018)
Ye, R.S., Zhang, Y.: General soliton solutions to a reverse-time nonlocal nonlinear Schrödinger equation. Stud. Appl. Math. 145(2), 197–216 (2020)
Wang, X., Li, J.N., Wang, L., Kang, J.F.: Dark-dark solitons, soliton molecules and elastic collisions in the mixed three-level coupled Maxwell-Bloch equations. Phys. Lett. A 432, 128023 (2022)
Gao, X.Y.: Bäcklund transformation and shock-wave-type solutions for a generalized (3+1)-dimensional variable-coefficient B-type Kadomtsev-Petviashvili equation in fluid mechanics. Ocean Eng. 96, 245–247 (2015)
Liu, S.H., Tian, B., Wang, M.: Painlevé analysis, bilinear form, Bäcklund transformation, solitons, periodic waves and asymptotic properties for a generalized Calogero-Bogoyavlenskii-Konopelchenko-Schiff system in a fluid or plasma. Eur. Phys. J. Plus 136, 917 (2021)
Zhang, R.F., Li, M.C., Gan, J.Y., Li, Q., Lan, Z.Z.: Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos Solitons Fractals 154, 111692 (2022)
Zhang, R.F., Li, M.C., Albishari, M., Zheng, F.C., Lan, Z.Z.: Generalized lump solutions, classical lump solutions and rogue waves of the (2+1)-dimensional Caudrey-Dodd-Gibbon-Kotera-Sawada-like equation. Appl. Math. Comput. 403, 126201 (2021)
Osman, M.S.: Nonlinear interaction of solitary waves described by multi-rational wave solutions of the (2+1)-dimensional Kadomtsev-Petviashvili equation with variable coefficients. Nonlinear Dyn. 87, 1209–1216 (2016)
Nisar, K.S., Ilhan, O.A., Abdulazeez, S.T., Manafian, J., Mohammed, S.A., Osman, M.S.: Novel multiple soliton solutions for some nonlinear PDEs via multiple exp-function method. Res. Phys. 21, 103769 (2021)
Kumar, V., Gupta, R.K., Jiwari, R.: Lie group analysis, numerical and non-traveling wave solutions for the (2+1)-dimensional diffusion-advection equation with variable coefficients. Chin. Phys. B 23(3), 030201 (2014)
Gupta, R.K., Kumar, V., Jiwari, R.: Exact and numerical solutions of coupled short pulse equation with time-dependent coefficients. Nonlinear Dyn. 79, 455–464 (2015)
Kumar, S., Kumar, A.: Lie symmetry reductions and group invariant solutions of (2+1)-dimensional modified Veronese web equation. Nonlinear Dyn. 98(3), 1891–1903 (2019)
Kumar, S., Kumar, A., Wazwaz, A.M.: New exact solitary wave solutions of the strain wave equation in microstructured solids via the generalized exponential rational function method. Eur. Phys. J. Plus 135(11), 870 (2020)
Benoudina, N., Zhang, Y., Khalique, C.M.: Lie symmetry analysis, optimal system, new solitary wave solutions and conservation laws of the pavlov equation. Commun. Nonlinear Sci. Numer. Simul. 94, 105560 (2021)
Wazwaz, A.M., El-Tantawy, S.A.: Solving the (3+1)-dimensional KP-Boussinesq and BKP-Boussinesq equations by the simplified Hirota’s method. Nonlinear Dyn. 88, 3017–3021 (2017)
Ma, W.X., Zhou, Y.: Lump solutions to nonlinear partial differential equations via Hirota bilinear forms. J. Differ. Equ. 264, 2633–2659 (2018)
Chen, S.J., Lü, X., Tang, X.F.: Novel evolutionary behaviors of the mixed solutions to a generalized Burgers equation with variable coefficients. Commun. Nonlinear Sci. Numer. Simul. 95, 105628 (2021)
Wazwaz, A.M.: New integrable (2+1)- and (3+1)-dimensional shallow water wave equations: multiple soliton solutions and lump solutions. Int. J. Numer. Method H 32, 138–149 (2022)
Wazwaz, A.M.: Construction of solitary wave solutions and rational solutions for the KdV equation by Adomian decomposition method. Chaos Solitons Fractals 12, 2283–2293 (2001)
He, L.C., Zhang, J.W., Zhao, Z.L.: M-lump and interaction solutions of a (2+1)-dimensional extended shallow water wave equation. Eur. Phys. J. Plus 136, 192 (2021)
Tang, Y.N., Zai, W.J.: New periodic-wave solutions for (2+1)- and (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equations. Nonlinear Dyn. 81, 249–255 (2015)
Kumar, S., Kumar, D., Kumar, A.: Lie symmetry analysis for obtaining the abundant exact solutions, optimal system and dynamics of solitons for a higher-dimensional Fokas equation. Chaos Solitons Fractals 142, 110507 (2021)
Zhang, R.F., Bilige, S.D., Liu, J.G., Li, M.C.: Bright-dark solitons and interaction phenomenon for p-gBKP equation by using bilinear neural network method. Phys. Scr. 96, 025224 025224 (2021)
Chen, S.J., Lü, X., Li, M.G., Wang, F.: Derivation and simulation of the M-lump solutions to two (2+1)-dimensional nonlinear equations. Phys. Scr. 96, 095201 (2021)
He, X.J., Lü, X.: M-lump solution, soliton solution and rational solution to a (3+1)-dimensional nonlinear model. Math. Comput. Simul. 197, 327–340 (2022)
Khare, A., Saxena, A.: Linear superposition for a class of nonlinear equations. Phys. Lett. A 377, 2761–2765 (2013)
Tan, W., Zhang, W., Zhang, J.: Evolutionary behavior of breathers and interaction solutions with M-solitons for (2+1)-dimensional KdV system. Appl. Math. Lett. 101, 106063 (2020)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, New York (2004)
Lü, X., Hua, Y.F., Chen, S.J., Tang, X.F.: Integrability characteristics of a novel (2+1)-dimensional nonlinear model: painlevé analysis, soliton solutions, Bäcklund transformation, Lax pair and infinitely many conservation laws. Commun. Nonlinear Sci. Numer. Simul. 95, 105612 (2021)
Shen, Y., Tian, B.: Bilinear auto-Bäcklund transformations and soliton solutions of a (3+1)-dimensional generalized nonlinear evolution equation for the shallow water waves. Appl. Math. Lett. 122, 107301 (2021)
Hu, X.B., Bullough, R.: A Bäcklund transformation and nonlinear superposition formula of the Caudrey-Dodd-Gibbon-Kotera-Sawada hierarchy. J. Phys. Soc. Jpn. 67, 772–777 (1998)
Qiao, J.M., Zhang, R.F., Yue, R.X., Rezazadeh, H., Seadawy, A.R.: Three types of periodic solutions of new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation via bilinear neural network method. Math. Meth. Appl. Sci. (2022). https://doi.org/10.1002/mma.8131
Hao, X.Z., Lou, S.Y.: Decompositions and linear superpositions of B-type Kadomtsev-Petviashvili equations. Math. Meth. Appl. Sci. (2022). https://doi.org/10.1002/mma.8138
Gao, X.Y., Guo, Y.J., Shan, W.R.: Bilinear forms through the binary Bell polynomials, N solitons and Bäcklund transformations of the Boussinesq-Burgers system for the shallow water waves in a lake or near an ocean beach. Commun. Theor. Phys. 72, 095002 (2020)
Wang, X., Wei, J., Geng, X.G.: Rational solutions for a (3+1)-dimensional nonlinear evolution equation. Commun. Nonlinear Sci. Numer. Simul. 83, 105116 (2020)
Zhang, R.F., Li, M.C.: Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 108, 521–531 (2022)
Ohta, Y., Yang, J.K.: Rogue waves in the Davey-Stewartson I equation. Phys. Rev. E 86, 036604 (2012)
Han, P.F., Bao, T.: Higher-order mixed localized wave solutions and bilinear auto-Bäcklund transformations for the (3+1)-dimensional generalized Konopelchenko-Dubrovsky-Kaup-Kupershmidt equation. Eur. Phys. J. Plus 137, 216 (2022)
Ma, W.X.: Generalized bilinear differential equations. Stud. Nonlinear Sci. 2, 140 (2011)
Raissi, M., Perdikaris, P., Karniadakis, G.E.: Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 378, 686–707 (2019)
Zhang, R.F., Bilige, S.D.: Bilinear neural network method to obtain the exact analytical solutions of nonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 95, 3041–3048 (2019)
Acknowledgements
The authors deeply appreciate the anonymous reviewers for their helpful and constructive suggestions, which can help improve this paper further. This work was supported by the National Natural Science Foundation of China (Grant Nos. 11371326 and 11975145).
Funding
There was no funding for this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the research effort and the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Han, PF., Zhang, Y. Linear superposition formula of solutions for the extended (3+1)-dimensional shallow water wave equation. Nonlinear Dyn 109, 1019–1032 (2022). https://doi.org/10.1007/s11071-022-07468-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07468-6