
Abstract
This paper investigates the anti-synchronization of fractional-order memristive chaotic circuits (FMCC) with time delay via an impulsive control scheme. Based on the Mittag-Leffler function, the impulsive control principle and the Lyapunov stability theory, several criteria are adopted to derive the impulsive anti-synchronization of FMCC with time delay. Finally, numerical examples are exploited to verify the effectiveness of the theoretical analysis, and some discussions about the stable region are given.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Memristor (short for memory resistor) was first discovered by Chua in 1971, which was the fourth basic circuit element of the passive two-terminal and had full rights to use the other three classic circuits, such as existing inductors, resistors and capacitors [1]. In the following years, the concept of memristor had not been proved experimentally until 2008 when a memristor being constructed by the physical component was published by the authors in the Hewlett–Packard laboratory [2, 3]. The resistance value of the memristor depends on the magnitude and polarity of the voltage. Specifically, the current resistance will be remembered when the voltage is off. Because of memristor’s characteristics, its potential applications of the chaotic system with memristor have been discovered in quite a few fields such as cryptography [4], image encryption [5] and filters [6]. Therefore, the behaviors and properties of memristor arouse much attention from a number of researches.
As known to all, fractional calculus theory is an ancient and fresh concept extensively used in the nonlinear dynamical systems and in the fields of physics, ecology, machinery, engineering and biology [7,8,9]. Concerned by a number of researchers [10, 11], fractional differential equation is identified as the generalization of the integral-order differential equation and the form in which all physical phenomena are presented. Its practical applications have great correlation with the dynamical behaviors, especially the stability of models. As a result, the synchronization of fractional differential equation has become one of the most active areas of research. The dynamical behaviors of fractional-order systems can be revealed in lots of chaotic systems, such as fractional-order Lü system, fractional-order Lorenz system and fractional-order Chua system [12]. In addition, fractional-order systems are able to generate more accurate result than other integer-order systems, which arouses great interest of researchers [13,14,15].
Meanwhile, as investigated by many scholars [16,17,18], the chaotic synchronization of dynamic systems is applicable in many scientific fields such as bioengineering [19], electromagnetic field [20, 21], secure communication [22] and cryptography [23]. A variety of synchronization methods have been put forward for fractional-order chaotic systems, such as period intermittent control method [24], active control method [25], sliding mode control method [26] and impulsive control method [27,28,29,30,31]. Impulse as a frequently used method in chaotic system contributes to system stabilization. Some researchers investigated the impulsive synchronization of some complex dynamical systems [32, 33]; some reported that of the memristive chaotic system [34,35,36]. In addition, the synchronization of fractional chaotic systems via impulsive control scheme was proposed in some papers [37,38,39,40,41]. However, there is no study on the anti-synchronization problem of FMCC with time delay via impulsive control method.
Under this context, this paper attempts to study anti-synchronization strategy of FMCC with time delay via impulsive control, the criteria condition of which is proposed via Lyapunov stability theory and impulsive control principle. Meanwhile, some discussions about the stable region are given by numerical analysis and several feasible suggestions for improvement are put forward.
This paper is structured as follows. Section 2 describes the model formulation, fundamental definitions and lemmas. The anti-synchronization for FMCC with time delay via impulsive control scheme is realized in Sect. 3. The influential factors of the stable region are discussed in Sect. 4, followed by some numerical examples that illustrate the correctness of theoretical method. The results and suggestions are put forward in the last section.
2 Preliminaries
In this paper, let \(R^{n}\) denotes the n-dimensional Euclidean space, \(x = \left( {x_{1} ,x_{2} ,x_{3} ,x_{4} } \right)^{T} \in R^{4}\), \(y = \left( {y_{1} ,y_{2} ,y_{3} ,y_{4} } \right)^{T} \in R^{4}\). In this section, some fundamental definitions and lemmas are recalled, and the mathematic model of FMCC with time delay is introduced.
2.1 Definitions and lemmas
Definition 1
[42] The Caputo fractional derivative of order q for function \(u\left( t \right)\) is defined by
where \(t \ge 0, m \in Z^{ + } , m - 1 < q < m,\) and \(\varGamma \left( \cdot \right)\) is the gamma function, that is, \(\varGamma \left( \tau \right) = \mathop \int \limits_{0}^{\infty } t^{\tau - 1} e^{ - t} {\text{d}}t\).
Moreover, when \(0 < q < 1\),
For simplicity, we denote \(D^{q} u\left( t \right)\) as the \({}_{0}^{c} D_{t}^{q} u\left( t \right)\) and describe all of the following Caputo operators.
Definition 2
[42] The Mittag-Leffler function is defined by
where \(q > 0\) and \(t \in C\).
Lemma 1
[43] For\(u\left( t \right) \in R^{n}\)is continuous and differentiable function, there is an inequality below
Lemma 2
[44] For\(x \in R^{ + }\)and\(0 < q < 1\), \(E_{q} \left( x \right)\)is the monotone increasing function.
Lemma 3
[45] Suppose that\(x\left( t \right) = \left( {x_{1} \left( t \right),x_{2} \left( t \right), \ldots ,x_{n} \left( t \right)} \right)^{T} \in R^{n}\)and\(y\left( t \right) = (y_{1} \left( t \right),y_{2} \left( t \right), \ldots y_{n} \left( t \right))^{T} \in R^{n}\), for all\(D = \left( {r_{ij} } \right)_{n \times n}\), the following inequality holds:
where\(s_{\hbox{max} } = \frac{1}{2}\left\| D \right\|_{\infty } = \frac{1}{2}\max_{i = 1}^{n} \left( {\mathop \sum \nolimits_{j = 1}^{n} \left| {r_{ij} } \right|} \right)\), \(\bar{s}_{\hbox{max} } = \frac{1}{2}\left\| D \right\|_{1} = \frac{1}{2}\max_{j = 1}^{n} \left( {\mathop \sum \nolimits_{i = 1}^{n} \left| {r_{ij} } \right|} \right)\).
Lemma 4
[46] Suppose\(V\left( t \right)\)be a continuous nonnegative function on\(\left[ {t_{0} - \tau , t_{0} } \right]\)satisfying the following inequality:
where\(0 < q < 1\), \(\bar{V}\left( t \right) = \max_{t - \tau \le s \le t} \left\{ {V\left( s \right)} \right\}\)and\(\vartheta > 0\)is a constant. Then
2.2 Model description
Based on the chaotic circuit with one memristor of [47] shown in Fig. 1, let \(x_{1} = u_{1} , x_{2} = u_{2} , x_{3} = i_{3} , x_{4} = \phi , \alpha = \frac{1}{{C_{1} }}, \beta = \frac{1}{L}, C_{2} = 1, R = 1, \gamma = r/L, \xi = G\) and \(\tau\) is the time delay in the current transmission. The mathematic model of memristive chaotic system can be described by

Chua’s chaotic circuits with a flux-controlled memristor
Similar to [47], the flux-controlled memristor is defined by
where \(W\left( \phi \right)\) is the memductance, \(\phi\) is flux, and \(a\) and \(b\) are constants.
Referring to the above model, the new fractional-order chaotic system with memristor according to (1) is described as
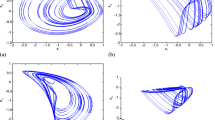
Usually, in order to get the phenomenon of chaos, we set \(q = 0.985, a = 12/11, b = 1/11, \alpha = 10, \beta = 14, \gamma = 0.1, \xi = 2.2\) and \(\tau = 0.02\); then, the simulation is done with the initial value \(\left( {0, 0.1, 0, 0} \right)^{T}\) to system (4), and the simulation results are shown in Fig. 2.

Chaotic attractor of FMCC, (a)\(x_{1} \left( t \right), x_{2} \left( t \right)\); (b)\(x_{2} \left( t \right), x_{3} \left( t \right)\); (c)\(x_{2} \left( t \right), x_{4} \left( t \right)\) and (d)\(x_{1} \left( t \right), x_{4} \left( t \right)\)
Let \(x = \left( {x_{1} ,x_{2} ,x_{3} ,x_{4} } \right)^{T}\), system (4) can be written as
where
and \(a,b,\gamma ,\xi ,\alpha ,\beta\) are positive constants.
To investigate the impulsive anti-synchronization of FMCC with time delay, the drive system can be rewritten as
In order to achieve anti-synchronization, we construct the following response system with impulsive control
where \(C_{k} \in R^{4 \times 4}\) is the impulsive control matrix and \(t_{k}\) is the impulsive instants which satisfy \(t_{1} \le t_{2} \le \cdots \le t_{k}\).
For systems (6) and (7), let the error states \(e\left( t \right) = y\left( t \right) + x\left( t \right)\), where \(e\left( t \right) = \left( {x_{1} \left( t \right) + y_{1} \left( t \right),x_{2} \left( t \right) + y_{2} \left( t \right),x_{3} \left( t \right) + y_{3} \left( t \right),x_{4} \left( t \right) + y_{4} \left( t \right)} \right)^{T}\). Then, the error dynamical system between drive system (6) and response system (7) is described by
where
3 Main result
In this section, the anti-synchronization problem of FMCC with time delay via an impulsive strategy is investigated.
Assumption 1
Because chaotic systems have bounded states regardless of the initial states, we assume that the following assumptions hold:
where \(M_{1} , M_{2} ,M_{3} ,M_{4}\) are real constants.
Remark 1
Based on the chaotic theory, the state of the chaotic system is bound, and many of the published articles use this assumption, such as [27, 31, 33].
Theorem 1
Let\(\rho\)is spectral radius, \(C_{k}\)is Hermite matrix, \(\hat{A} = \left\| A \right\|_{2} , d_{k}\)is the largest eigenvalue of matrix\(\left( {I + C_{k} } \right)^{T} \left( {I + C_{k} } \right).\)If there exists a constant\(\eta > 1\)such that the following conditions hold:
where\(\delta = 2\left( {\hat{A} + 3\alpha bM_{1} M_{4} + s_{\hbox{max} } + \bar{s}_{\hbox{max} } } \right)\), \(s_{\hbox{max} } = \frac{1}{2}\left\| B \right\|_{\infty }\), \(\bar{s}_{\hbox{max} } = \frac{1}{2}\left\| B \right\|_{1}\), and\(\tau_{k} = t_{k } - t_{k-1}\), \(k = 1,2, \ldots\), then the trivial solution of error dynamical system (8) is asymptotically stable, which implies that systems (6) and (7) achieve anti-synchronization.
Proof
Construct the following Lyapunov-like function
Take a time derivative of \(V\left( t \right)\) along \(e\left( t \right)\) of system (12). From Lemma 1, for \(t \in \left( {t_{k} ,t_{k + 1} } \right]\), we get
From Lemma 3, we have
where \(\bar{V}\left( t \right) = \max_{t - \tau \le s \le t} \left\{ {V\left( s \right)} \right\}\). From Lemma 4,
Put \(\delta\) into Eq. (16), we have
When \(t = t_{k},k \in N\), we have
Therefore, from inequalities (18) and (19), we have
For \(t \in \left( {t_{0} ,t_{1} } \right]\), it follows from inequality (20) that
When \(t = t_{1}\), we have
Similarly, for \(t \in \left( {t_{1} ,t_{2} } \right]\), we have
When \(t = t_{2}\), we have
In general, when \(t = t_{k}\), we have
and for \(t \in \left( {t_{k} ,t_{k + 1} } \right]\), we have
According to the condition (H2), when \(k \to \infty\), we have
Consequently, \(\left\| {e\left( t \right)} \right\| \to 0\) as \(k \to \infty\). It follows that the trivial solution of error dynamical system (8) is asymptotically stable, which implies that system (7) is anti-synchronized with system (6). This completes the proof.
Remark 2
Recently, there has been a small number of works about the impulsive anti-synchronization of the fractional-order chaotic circuit, but these research findings are without considering the effect of time delay and memristor. Compared with [34,35,36,37,38], we consider a fractional-order delayed chaotic circuit under with memristor. The condition of impulsive anti-synchronization between master–slave systems is achieved. Figures 3, 4 and 5 show that the control scheme is effective.

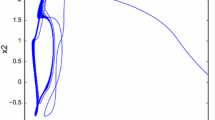
Dynamical behaviors of systems (6) and (7) without impulsive control matrix, \(q = 0.985\), (a)\(x_{1} \left( t \right), y_{1} \left( t \right)\); (b)\(x_{2} \left( t \right), y_{2} \left( t \right)\); (c)\(x_{3} \left( t \right), y_{3} \left( t \right)\); (d)\(x_{4} \left( t \right), y_{4} \left( t \right)\)

Dynamical behaviors of systems (6) and (7) with impulsive control matrix, \(q = 0.985, k_{b} = 1.6, \tau_{k} = 0.01\), (a)\(x_{1} \left( t \right), y_{1} \left( t \right)\); (b)\(x_{2} \left( t \right), y_{2} \left( t \right)\); (c)\(x_{3} \left( t \right), y_{3} \left( t \right)\); (d)\(x_{4} \left( t \right), y_{4} \left( t \right)\)

4 Numerical simulations
In this section, some numerical simulations are presented to verify and demonstrate the proposed theoretical approach; and the connection of stable region is given later. The simulations are run on MATLAB program based on the predictor–corrector algorithm [48] for fractional-order differential equations.
4.1 Anti-synchronization of FMCC under impulsive control
To facilitate the description of impulsive property, the impulsive matrix is denoted as \(C_{k} = {\text{diag}}\left( { - k_{b} , - k_{b} , - k_{b} , - k_{b} } \right),\) which \(k_{b}\) refers to the impulsive coupling strength. On the basis of Fig. 2, when \(M_{1} = 3\), and \(M_{4} = 1.8\) are selected, \(\delta = 69.6\) is obtained. According to the condition (H1) of Theorem 1, the result of \(0 \le k_{b} \le 2\) is got. Moreover, after setting \(\tau_{k} = 0.01, q = 0.985, \eta = 1.1,\) and \(k_{b} = 1.6\), by MATLAB calculation program, we get
then, the condition (H2) of Theorem 1 holds. The initial values of system (6) and system (7) are set to be \(\left( {0,\,0.1,\,0,\,0} \right)^{T}\) and \(\left( { - 0.5,\,0,\,0.5,\, - 0.5} \right)^{T}\), respectively. It follows from Theorem 1 that system (7) is anti-synchronized with system (6) under the impulsive control matrix \(B_{k}\).
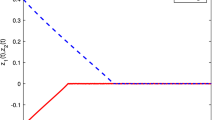
Figure 3 illustrates the time evolution curves between system (6) and system (7) without impulsive control matrix \(C_{k}\), indicating that both systems have different state trajectories over time. Figure 4 gives the state trajectories of systems (6) and (7) with impulsive control matrix \(C_{k}\). Figure 5 depicts the error dynamics of the two systems with impulsive control matrix \(C_{k}\), suggesting the feasibility of implementing impulsive anti-synchronization in limited time.
4.2 The analysis of stable region
Figure 6 displays the stable region about impulsive interval \(\tau_{k}\) and order \(q\) with different \(k_{b}\). Under the condition (H2) of Theorem 1 when \(\eta = 1.1\) and \(\delta = 69.6\), the stable region about \(\tau_{k}\) increases with order \(q\) from 0 to 1.

Estimation of the stable region about \(\tau_{k}\) and \(q\), when \(\eta = 1.1\), \(\delta = 69.6\)
With different \(\tau_{k}\), the stable region of impulsive coupling strength \(k_{b}\) and order \(q\) is shown in Fig. 7. Obviously, a larger stable region can be obtained with a bigger \(q\).

Estimation of the stable region about \(k_{b}\) and \(q\), when \(\eta = 1.1\), \(\delta = 69.6\)
Under some fixed values of \(\eta\) when \(q = 0.985\), the stable region with impulsive coupling strength \(k_{b}\) and impulsive interval \(\tau_{k}\) is displayed in Fig. 8. It shows that \(\tau_{k}\) goes infinity when \(k_{b} = 1\). This is because the condition (H2) of Theorem 1 is always satisfied if \(d_{k} = 0\).

Estimation of the stable region about \(k_{b}\) and \(\tau_{k}\), when \(q = 0.985\), \(\delta = 69.6\)
5 Results and discussions
In this paper, the anti-synchronization of FMCC with time delay has been achieved in finite time based on Lyapunov stability theories and principle of impulsive control. The results are given not only by theoretical analysis, but also by numerical simulation. Under the conditions of Theorem 1, some discussions about the stable region have been obtained. With fixed impulsive coupling strength, a larger stable region for FMCC with time delay is obtained at smaller impulsive interval \(\tau_{k}\) and the bigger fractional order \(q\) where \(0 < q < 1\). Because the discussed chaotic system with memristor takes into account impulsive interval, impulsive coupling strength and fractional order, it is practical and attractive in understanding the chaotic system with memristor. This study will have potential applications to cryptography, filters and image encryption.
References
L O Chua IEEE Circuit Theory 18(5) 507 (1971)
D B Strukov, G S Snider, D R Stewart and R S.Williams Nature 453 80 (2008)
J M Tour and T He Nature 453 42 (2008)
X L Shi, S K Duan, L D Wang, T W Huang and C D Li Neurocomputing 166(C) 487 (2015)
B Wang, F C Zou and J Cheng Optik 154 538 (2017)
Y B Zhao, X Z Zhang, J Xu and Y C Guo Chaos Solitons Fractals 81(A) 315 (2015)
R Hilfer (New Jersey: World Scientific) (2001)
K Moaddy, A G Radwan, K N Salama, S Momani and I Hashim Comput. Math. Appl. 64(10) 3329 (2012)
D Tripathi, S K Pandey and S Das Appl. Math. Comput. 215(10) 3645 (2010)
A Kumar and S Kumar Proc Natl Acad. Sci. Sect. A Phys. Sci. 1–12 (2017)
G A Anastassiou, I K Argyros and S Kumar Fundam. Inform. 151 241 (2017)
L X Yang and J Jiang Discrete Dyn. Nat. Soc. 3 485 (2013)
H L Li, C Hu, Y L Jiang, Z L Wang and Z D Teng Chaos Solitons Fractals 92 142 (2016)
X D Ding, J D Cao, X Zhao and F E Alsaadi Neural Process. Lett. 46 561 (2017)
R Rakkiyappan, G Velmurugan and J D Cao Nonlinear Dyn. 78(4) 2823 (2014)
J D Cao, R Sivasamy and R Rakkiyappan Circuits Syst. Signal Process. 35 811 (2016)
J Ma, A H Zhang, Y F Xia and L P Zhang Appl. Math. Comput. 215(9) 3318 (2010)
X Y Wang, X L Gao and L L Wang. Int. J. Mod. Phys. A 27(09) 1350033 (2013)
R L Magin Crit. Rev. Biomed. Eng. 32 195 (2004)
J Ma, L Mi, P Zhou, Y Xu and T Hayat. Appl. Math. Comput. 307 321 (2017)
J Ma, F Q Wu and C N Wang Int. J. Mod. Phys. B 31(2) 1650251 (2016)
T Yang and L O Chua IEEE Circuits Syst. 44(10) 976 (1997)
J Garcíaojalvo and R Roy. Phys. Rev. Lett. 86(22) 5204 (2001)
W G Xia and J D Cao Chaos 19(1) 013120 (2009)
S K Agrawal, M Srivastava and S Das Chaos Solitons Fractals 45(6) 737 (2012)
H Q Wu, L F Wang, P F Niu and Y Wang Neurocomputing 235(C) 264 (2017)
W Xiong and J J Huang Adv. Differ. Equ. 101 (2016)
I Stamova and G Stamov. Commun. Nonlinear Sci. 19(3) 702 (2014)
I Stamova Nonlinear Dyn. 77(4) 1251 (2014)
Q J Zhang, J A Lu and J C Zhao Commun. Nonlinear Sci. 15(4) 1063 (2010)
X Y Wang, Y L Zhang, D Lin and N Zhang Chin. Phys. B 20 030506 (2011)
W H Chen, Z Y Jiang, J C Zhong and X M Lu. J Frankl. I 351 4084 (2014)
J Q Lu, Z D Wang, J D Cao, D W C Ho and J Kurths Int. J. Bifurc. Chaos 22(07) 1250176 (2012)
H G Wu, S Y Chen and B C Bao Acta Phys. Sin. 64(3) 030501 (2015)
A Chandrasekar and R Rakkiyappan Neurocomputing 173 1348 (2016)
I Petras. IEEE Trans Circuits II 57(12) 975 (2010)
J G Liu Chin. Phys. B 22 060501 (2013)
W Ma, C Y Li, Y J Wu Chaos 26(8) 084311 (2016)
I Stamova Appl. Math. Comput. 237(3) 605 (2014)
I Stamova and G Stamov Functional and Impulsive Differential Equations of Fractional Order (2017)
F Wang, Y Q Yang, A H Hu and X Y Xu Nonlinear Dyn. 82(4) 1979 (2015)
I Podlubny Mathematics in Science and Engineering (1999).
N Aguila-Camacho, M A Duarte-Mermoud and J A Gallegos Commun. Nonlinear Sci. 19(9) 2951 (2014)
M Saigo, R K Saxena and A A Kilbas. Integr. Transf. Spec. Funct. 15(1) 31 (2004)
S Liang, R C Wu and L P Chen. Physica A 444, 49–62 (2016)
F Wang and Y Q Yang Physica A 482, 158–172 (2017)
B C Bao, W Hu, J P Xu, Z Liu and L Zhou Acta Phys. Sin. 60(12) 1775 (2011)
K Diethelm, N J Ford and A D Freed Nonlinear Dyn. 29 3 (2002)
Acknowledgements
This work is supported by the National Science Foundation of China (Grants Nos. 51777180, 11771376).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Meng, F., Zeng, X. & Wang, Z. Impulsive anti-synchronization control for fractional-order chaotic circuit with memristor. Indian J Phys 93, 1187–1194 (2019). https://doi.org/10.1007/s12648-019-01386-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-019-01386-x