
Abstract
This paper aims to study the finite-time synchronization (FTS) of fractional-order delayed memristor-based Cohen–Grossberg neural networks (FODMCGNNs). Firstly, on the basis of the inequality on fractional-order derivative of the composite function, a novel fractional-order finite-time inequality is established; it extends the existing one and can be employed to discuss the FTS of fractional-order differential systems. More importantly, it is demonstrated theoretically that the estimated settling time by this inequality is more accurate than that with the existing one. Subsequently, on the basis of this novel inequality, the designed feedback controllers, and the fractional-order power law inequality, two novel criteria are obtained to ensure the FTS of FODMCGNNs. Finally, three examples are given to verify the correctness and advantage of the obtained results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the past decades, neural networks (NNs) have attracted much attention on account of their potential applications in agriculture, medical image-based diagnosis, manipulator motion generation, fault diagnosis of mechanical intelligence, and so on. Cohen–Grossberg neural network (CGNN) was first proposed in 1983 [7], which includes numerous models such as evolutionary, population biology, and neurobiology theory. It can be seen as the generalization of some classical NNs such as cellular NNs, Hopfield NNs, and bidirectional associative memory NNs [3]. Hence, CGNNs have been extensively investigated by many researchers [17].
Fractional-order calculus has attracted more and more interest due to its wide application prospects in uncertain financial market, cancer treatment, blood ethanol concentration systems, and so on. Fractional-order calculus possesses more degrees of freedom and infinite memory in comparison with integer-order calculus. Hence, it can describe many systems better. Consequently, fractional-order calculus has been incorporated into CGNNs to form fractional-order Cohen–Grossberg neural networks (FOCGNNs). Recently, FOCGNNs have been widely explored and many valuable contributions on them have been made [11, 26].
The memristor is a two-terminal electrical component relating magnetic flux and electric charge. It was first put forward by Chua [6] and realized by HP labs [25]. The memristor has been extensively investigated for hardware implementation of NNs on account of the superiorities of functional similarity to the biological synapse, low power consumption, nanometer size, and fast switching speed [34]. Hence, the memristor is introduced to simulate the synapse in the FOCGNNs to form fractional-order memristor-based Cohen–Grossberg neural networks (FOMCGNNs). Recently, FOMCGNNs have been a hot topic and some remarkable works on FOMCGNNs have been reported [1, 28].
Synchronization of FOMCGNNs has been paid much attention owing to its wide practical applications in image encryption, cryptography, HIV infection model, secure communications, and so on. Up to now, plenty of contributions have been made on synchronization, such as Mittag–Leffler synchronization, quasi-synchronization, asymptotic synchronization, and exponential synchronization, which are all concerned with synchronization error within the infinite-time interval. As reported in [29], most real systems only operate within a limited time interval. Hence, more and more efforts have been made to investigate the finite-time synchronization (FTS) of fractional-order systems and a great deal of valuable research achievements have been reported until now. In [2], the FTS of fractional-order systems was first investigated by using fractional nonsingular terminal sliding mode technique. In [9], the FTS of fractional-order real valued memristor-based neural networks was studied by the fractional-order Gronwall inequality. In [35], the FTS of complex-valued fractional-order neural networks was investigated by some developed fractional-order inequalities. In [31], the FTS of quaternion-valued fractional-order neural networks was investigated on the basis of some established fractional-order differential inequalities. Overall, the above discussed FTS can be divided into two categories. The first category of FTS means that the synchronization error tends to zero in a limited time. The second category of FTS means that the synchronization error does not exceed the given bounds within a limited time interval. The first category of FTS is investigated in this article.
Due to finite processing speeds and information transmission among the units, time delays are universally involved in neural networks, which may bring about some undesirable phenomenon such as chaos, oscillation, and even instability [8]. Therefore, it is necessary and significant to study the FTS of fractional-order delayed memristor-based Cohen–Grossberg neural networks (FODMCGNNs). Recently, some contributions have been made to the FTS of FODMCGNNs. In [36], on the basis of the fractional-order Gronwall inequality, the first kind of FTS of FODMCGNNs was investigated. In [16], the second kind of FTS of FODMCGNNs was investigated with the aid of inequality skills. However, the results in [16] are connected with a certain imperfection. Specifically, the FTS criteria were established on the basis of unreliable inequality and equality, respectively. The detailed discussion can be found in Remarks 7 and 8.
It is widely known that the integer-order finite-time inequality (IOFTI) is a main tool of FTS theory for ordinary differential systems [19], a very natural idea is to extend the IOFTI to the corresponding FO case to explore the FTS of fractional-order differential systems (FODSs). Nowadays, various kinds of IOFTIs have been generalized to the fractional-order finite-time inequalities (FOFTIs) to study the FTS of FODSs [32]. For example, the FOFTI \({}^c_{t_0}D^{\nu }_t V(t) \le -b\) has been established to investigate the FTS of various FO complex networks [23]. The FOFTI \({}^c_{t_0}D^{\nu }_t V(t) \le -\delta V(t)-\epsilon \) has been developed to study the FTS of various FO neural networks [21]. Recently, an attempt [15, Property 3] has been made to generalize the classical first-order inequality \( V'(t)\le -\delta V(t)-\epsilon V^{\vartheta }(t)\) with \(0<\vartheta <1\) in [24] to the fractional-order case \({}^c_{t_0}D^\nu _t V(t)\le -\delta V(t)-\epsilon V^{\vartheta }(t)\) with \(0<\vartheta <1\). However, the FOFTI has additional features over the IOFTI [33]. The commonly used theoretical basis, which was used in the proof of [15, Property 3], \({}^c_{t_0}D^\nu _t h^{\alpha }(t)=\frac{\Gamma (2-\nu )\Gamma (1+\alpha )}{\Gamma (1+\alpha -\nu )}\) \(h^{\alpha -1}(t){}^c_{t_0}D^\nu _t h(t)\) may be not applicable. As a result, the FOFTI, which is based on this particular equality, appears to be uncertain and raises questions about its validity. In summary, the theory of FOFTI is still in its infancy and remains to be developed further. The main difficulty is that the existing widely used theoretical basis is difficult to establish the novel FOFTI. It is still a challenging task to develop the novel FOFTI by studying the FTS of FODMCGNNs and reducing the conservativeness of the results.
Motivated by the aforementioned discussions, the FTS of FODMCGNNs will be investigated by the novel FOFTI, the designed feedback controllers, and the fractional-order power law inequality. The key points for our contributions include:
-
(i)
A novel fractional-order finite-time inequality is established; it extends the existing one and can be employed to investigate the FTS of FODSs.
-
(ii)
With the help of the novel fractional-order finite-time inequality, the designed feedback controllers, and the fractional-order power law inequality, two novel criteria are obtained to ensure the FTS of FODMCGNNs.
-
(iii)
It is demonstrated theoretically that the estimated settling time obtained by our developed novel inequality is more accurate than the existing one (see Remark 5).
The rest of this article is arranged as follows. Preliminaries on fractional-order calculus are provided in Sect. 2. Besides, the considered FODMCGNNs are also presented. In Sect. 3, a novel fractional-order finite-time inequality is established. Based on this developed inequality, the designed feedback controllers, and the fractional-order power law inequality, two novel FTS criteria of FODMCGNNs are obtained. In Sect. 4, three examples are provided to support the theoretical results. Conclusions are given in Sect. 5.
Notations: \(\mathbb {N}_\imath =\{\imath ,\imath +1,\imath +2,\ldots \}\), \(\mathbb {N}_\imath ^\jmath =\{\imath ,\imath +1,\imath +2,\ldots ,\jmath \}\), where \(\jmath ,\imath \in \mathbb {R}\) and \(\jmath -\imath \in \mathbb {N}_1\). For \(w=(w_1,w_2,\ldots ,w_m)^{\textrm{T}}\in \mathbb {R}^{m}\), \(\Vert w\Vert =\sum _{i=1}^{m}|w_i|\). \(\textrm{sign}(w)\) is the sign function of \(w\in \mathbb {R}\). \(\mathbb {R}\), \(\mathbb {R}^{+}\) are the set of real numbers, the set of nonnegative numbers, respectively. \(\mathbb {R}^{m}\) is the m-dimensional Euclidean space. \({\mathscr {C}}^m([0,+\infty ),\mathbb {R})\) represents a set of continuous m-order differentiable functions from \([0,+\infty )\) into \(\mathbb {R}\).
2 Preliminaries and problem formulation
2.1 Preliminaries
Definition 1
[22] The Caputo derivative of the function \(w \in {\mathscr {C}}^1([t_0,t], \mathbb {R})\) with \(\kappa \)-order is given by
where \(\kappa \in (0,1)\), \(\Gamma (\cdot )\) is the gamma function.
Lemma 1
[27] Assume \({w}\in {\mathscr {C}}^1(\mathbb {R}, \mathbb {R})\) and \(\upsilon \in {\mathscr {C}}^1\)
\(([t_0,+\infty ),\mathbb {R})\). If w is convex on \(\mathbb {R}\) and \(\kappa \in (0,1)\), then
Lemma 2
[21] Suppose that \(V \in {\mathscr {C}}^1([t_0,+\infty ),\mathbb {R})\),
where \(0<\kappa <1\), \(\lambda \ne 0\) and \( \mu \) are constants. Then
where \(E_{\kappa }(z)=\sum _{i=0}^{\infty }\frac{z^i}{\Gamma (i\kappa +1)}\) is the Mittag–Leffler function.
Lemma 3
[14] For \(a,b>0\), \(\xi ,\eta >1\), and \(1/\xi +1/\eta =1\), one has
Lemma 4
[32] (Fractional-order power law inequality) Suppose that \(\kappa \in (0,1)\), \({\widetilde{p}}\ge 1\), and the function \(f\in {\mathscr {C}}^1(\mathbb {R}, \mathbb {R})\). Then one has
Lemma 5
[20] If there exists a positive definite function \(V \in {\mathscr {C}}^1([t_0,+\infty ),\mathbb {R}^+)\) such that
where \(0<\kappa <1\), \(\mu >0\), then one has \(\lim _{t\rightarrow t^\star } V (t) = 0\) and \(V (t) = 0\) for all \(t\ge t^\star \), where
Lemma 6
[12, Lemma 1] Assume that \(\delta >0\), \(\epsilon >0\), \(0<\mu <1\), and \({\widetilde{U}}\in \mathbb {R}^n\) is a neighborhood of the origin. If there exists a positive definite function \(V \in {\mathscr {C}}^1({\widetilde{U}},\mathbb {R}^+)\) such that
then one has \(\lim _{t\rightarrow t^*} V (t) = 0\) and \(V (t) = 0\), \(t\ge t^*\), where
2.2 Problem formulation
Consider the following FODMCGNNs
and
where \(k\in \mathbb {N}_1^n\), the fractional-order \(\kappa \in (0,1)\); \(d_k(\cdot )\) denotes the amplification function, \(c_k(\cdot )\) is the well-behaved function, \(x_k(\cdot )\), \(y_k(\cdot )\) represent the states of the k-th neuron, \(h_i(\cdot )\) and \(g_i(\cdot )\) stand for the activation functions, \(a_{ki}(\cdot )\) and \(b_{ki}(\cdot )\) are the memristive synaptic connection weights, the constant \(\rho >0\) is the transmission delay, \(J_k\) represents constant external inputs.
On the basis of the feature of memristor [36], let
where \(a_{ki}^{\diamond }\), \(a_{ki}^{\diamond \diamond }\), \(b_{ki}^{\diamond }\), \(b_{ki}^{\diamond \diamond }\), \(k,i\in \mathbb {N}_1^n\) are constants, the switching jumps \(\mathcal {T}_k>0\).
Since the FODMCGNNs (3) and (4) are discontinuous, the solution of the FODMCGNNs (3) and (4) cannot be defined via the classical solutions. To investigate the solutions of the FODMCGNNs (3) and (4), the solutions of the FODMCGNNs (3) and (4) have to be considered in Filippov’s sense [13]. Hence, the FODMCGNNs (3) and (4) can be transformed into the their differential inclusion form via differential inclusions and the set-valued maps. Based on this, one defines the set-valued maps as follows:
where the convex closure of a set is denoted as co; \(K[a_{lk}(x_k(t))]\), \(K[b_{lk}(x_k(t-\hbar ))]\), \(K[a_{lk}(y_k(t))]\), and \(K[b_{lk}(y_k(t-\hbar ))]\) are all closed, convex and compact about \(x_k(t)\), \(x_k(t-\hbar )\), \(y_k(t)\), and \(y_k(t-\hbar )\).
On the basis of the theory of differential inclusions and the set-valued maps, the FODMCGNNs (3) and (4) can be rewritten as
and
respectively.
According to differential inclusions theory and the set-valued map, there exist \({\widetilde{a}}_{ki}(x_i(t))\in K[a_{ki}(x_i(t))]\), \({\widetilde{b}}_{ki}(x_i(t-\rho )) \in K[b_{ki}(x_i(t-\rho ))]\), \({\widehat{a}}_{ki}(y_i(t)) \in K[a_{ki}(y_i(t))]\) and \({\widehat{b}}_{ki}(y_i(t-\rho ))\in K[b_{ki}(y_i(t-\rho ))]\) such that the FODMCGNNs (3) and (4) can be rewritten as
and
Let \(z_k(t)=y_k(t)- x_k(t)\). Then the synchronization error system is
Definition 2
FODMCGNNs (3) and (4) are finite-time synchronized if there exists a constant \({\tilde{t}}>0\) satisfying
In addition, \(t^*=\inf \{t|z_k(t)=0, \; t\ge t_0\}\) is the settling time.
In order to realize the FTS between the FODMCGNNs (3) and (4), the following assumptions are given.
Assumption 1
[20] There exist positive constants \({\underline{d}}_k\), \({\bar{d}}_k\), \({\widetilde{d}}_k\) such that
and
for \(x(t),y(t)\in \mathbb {R}\), \(k\in \mathbb {N}_1^n\).
Assumption 2
[20] There exists a constant \(\zeta _k>0\) such that
for \(x(t),y(t)\in \mathbb {R}\), \(k\in \mathbb {N}_1^n\).
Assumption 3
[20] There exist positive constants \({\bar{h}}_k\), \({\bar{g}}_k\), \(H_k\), \(G_k\) satisfying
for \(x(t),y(t)\in \mathbb {R}\), \(k\in \mathbb {N}_1^n\).
Lemma 7
[10] Let \(\breve{a}_{ki}=\max \{|{a}^\diamond _{ki}|,|{a}^{\diamond \diamond }_{ki}| \}\). \(\breve{b}_{ki}=\max \{|{b}^\diamond _{ki}|,|{b}^{\diamond \diamond }_{ki}|\}\). Then one has
for \(x_k(t),x_i(t),x_i(t-\rho ),y_k(t),y_i(t),y_i(t-\rho )\in \mathbb {R}\), \(k,i\in \mathbb {N}_1^n\).
The objective of this paper is to establish two novel FTS criteria between FODMCGNN (3) and FODMCGNN (4) under the designed feedback controllers.
3 Main results
3.1 Novel fractional-order finite-time inequality
Remark 1
In [15, Property 3], to discuss the FTS of memristive neural networks with the fractional-order \(0<\nu <1\), the inequality
was established on the basis of the commonly used equality
where \(0<\nu < 1,\alpha \ge 1\). In fact, the equality (13) may be not applicable. For example, let \(h(t)=t\), \(\alpha =2\), \(t=1\), \(\nu =0.6\), \(t_0=0\). Then one has
and
It can be seen from (14) and (15) that the equality (13) may be not feasible. Consequently, the inequality (12) seems questionable to be used to investigate the FTS of FODMCGNNs.
Now that the equality (12) seems questionable, it is interesting and important to establish a novel one. With the help of the inequality on fractional-order derivative of composite function (Lemma 1), a novel fractional-order finite-time inequality can be derived as follows.
Lemma 8
If there exists a positive definite function \(V\in {\mathscr {C}}^1\) \(([t_0,+\infty ),\mathbb {R}^+)\) such that
where \(0<\nu <1\), \(\delta \ne 0\), \(\epsilon >0\), \(\epsilon +\delta V^{1+\vartheta }(t_0)>0\), and \(\vartheta \ge 0\), then one has \(\lim _{t\rightarrow t^*} V (t) = 0\) and \(V (t) = 0\), \(t\ge t^*\), where
\(T_1^*\) is the unique root of the equation
Proof
Let \(\hbar (\upsilon )=\upsilon ^{1+\vartheta }\) and \(\upsilon (t)=V(t)\). It follows from \(\vartheta \ge 0\) that \(\hbar (\upsilon )\) is convex on \(\mathbb {R}\). Therefore, from Lemma 1 one has
With the help of Lemma 2, one has for \(t\ge t_0\)
i.e., for \(t\ge t_0\)
Let
For \(\delta >0\), one has that \(E_{\nu }\big (-\delta (1+\vartheta )(t-t_0)^{\nu }\big )\) is a monotonically decreasing function. In addition, it follows from \(\epsilon +\delta V^{1+\vartheta }(t_0)>0\) that \(\frac{\epsilon }{\delta }+V^{1+\vartheta }(t_0)>0\). Then \(\Psi (t)\) is a monotonically decreasing function.
For \(\delta <0\), one has that \(E_{\nu }\big (-\delta (1+\vartheta )(t-t_0)^{\nu }\big )\) is a monotonically increasing function. In addition, it follows from \(\epsilon +\delta V^{1+\vartheta }(t_0)>0\) that \(\frac{\epsilon }{\delta }+V^{1+\vartheta }(t_0)<0\). Then \(\Psi (t)\) is a monotonically decreasing function.
Therefore, \(\Psi (t)\) is monotonically decreasing function for any \(\delta \ne 0\). Through verification, one has \(\Psi (T_1)= 0\). It follows from the inequality (19) that
Furthermore, from squeeze theorem in [4, Theorem 4.2.7], one has
where
\(T_1^*\) is the unique root of the equation
If there exists \({\tilde{t}}\ge T_1\) such that \(V({\tilde{t}})>0\), then from the inequality (19) and the fact that \(\Psi (t)\) is monotonically decreasing function, one has
which is a contradiction.
Thus, one has
The proof of Lemma 8 is completed. \(\square \)
Remark 2
If \(\delta >0\), then from (20) one has \(0<E_\nu (z)<1\). Furthermore, from [30, Lemma 3] one has \(T_1^*<0\), which leads to \(\frac{-T_1^*}{\delta (1+\vartheta )}>0\). If \(\delta <0\), then from (20) one has \(E_\nu (z)>1\). Furthermore, from [30, Lemma 3] one has \(T_1^*>0\), which also leads to \(\frac{-T_1^*}{\delta (1+\vartheta )}>0\). All in all, for these two cases one both has \(T_1>t_0\).
When \(\vartheta =0\) in Lemma 8, one has the following Corollary 1.
Corollary 1
If there exists a positive definite function \(V \in {\mathscr {C}}^1([t_0,+\infty ),\mathbb {R}^+)\) such that
where \(0<\nu <1\), \(\delta >0\), \(\epsilon >0\), and \(\epsilon +\delta V(t_0)>0\), then one has \(\lim _{t\rightarrow t^*} V (t) = 0\) and \(V (t) = 0\), \(t\ge t^*\), where
\(T_2^*\) is the unique root of the equation
Remark 3
Evidently, the estimation (22) in Corollary 1 is consistent with the result given in [31, Lemma 5]. Therefore, result in Lemma 8 generalizes the one in the existing literature.
Remark 4
When \(0<V(t_0)\le 1\), \(\epsilon >0\), and \(\delta >0\), one has that \(\frac{\epsilon }{\epsilon +\delta V^{1+\vartheta }(t_0)}\) is increasing with respect to \(\vartheta \). On the other hand, \(E_\nu (\cdot )\) is a monotonically increasing function, so one also has that \(T_1^*\) is monotonically increasing with respect to \(E_\nu (T_1^*)(=\frac{\epsilon }{\epsilon +\delta V^{1+\vartheta }(t_0)})\). Therefore, when \(0<V(t_0)\le 1\), \(\epsilon >0\), and \(\delta >0\), \(T_1^*\) is monotonically increasing with respect to \(\vartheta \).
Remark 5
From Remark 2 one has \(T_1^*<0\) when \(\delta >0\), which combined with the conclusion of Remark 4, one has that for \(0<V(t_0)\le 1\), \(\epsilon >0\), and \(\delta >0\), the estimated settling time \(T_1(\vartheta )=t_0+\big (\frac{-T_1^*}{\delta (1+\vartheta )}\big )^{\frac{1}{\nu }}\) is monotonically decreasing with respect to \(\vartheta \). Furthermore, since \(\vartheta \ge 0\), one has \(T_1(\vartheta )\le T_1(0)\). That is to say, when \(0<V(t_0)\le 1\), \(\epsilon >0\), and \(\delta >0\), the estimated settling time \(T_1(\vartheta )\) given by the inequality (16) is more accurate than the one \(T_1(0)=T_2\) given by Corollary 1 [31, Lemma 5].
When \(\nu =1\) in Lemma 8, one has the following Corollary 2.
Corollary 2
If there exists a positive definite function \(V\in {\mathscr {C}}^1([t_0,+\infty ),\mathbb {R}^+)\) such that
where \(\delta \ne 0\), \(\epsilon >0\), \(\epsilon +\delta V^{1+\vartheta }(t_0)>0\), and \(\vartheta \ge 0\), then one has \(\lim _{t\rightarrow t^*} V (t) = 0\) and \(V (t) = 0\), \(t\ge t^*\), where
Remark 6
From the proof of Lemma 8 one has that the result in Lemma 8 is also valid for \(\delta <0\) and \(\epsilon +\delta V^{1-\mu }(t_0)>0\). Therefore, combing Lemma 6 and Corollary 2, one has the following Corollary 3.
Corollary 3
If there exists a positive definite function \(V \in {\mathscr {C}}^1({\widetilde{U}},\mathbb {R}^+)\) such that
where \({\widetilde{U}}\in \mathbb {R}^n\) is a neighborhood of the origin, \(\delta \ne 0\), \(\epsilon >0\), \(\epsilon +\delta V^{1+\vartheta }(t_0)>0\), and \(\vartheta <1\), then one has \(\lim _{t\rightarrow t^*} V (t) = 0\) and \(V (t) = 0\), \(t\ge t^*\), where
3.2 FTS of FODMCGNNs
In this subsection, two novel FTS criteria of FODMCGNN are obtained by the novel fractional-order finite-time inequality, the designed feedback controllers, and the fractional-order power law inequality.
In order to achieve the FTS between the FODMCGNN (3) and FODMCGNN (4), the following feedback controller is designed,
where \(k\in \mathbb {N}_1^n\), \(\varrho \ge {\widetilde{p}}\ge 1\), \(\gamma \), \(\ell \), \(\chi \), \(\eta \) are positive constants.
Theorem 1
Under the feedback controller (25) and Assumptions 1–3, the FODMCGNNs (3) and (4) can be finite-time synchronized if
where
and
In addition, the settling time \(t^*\) is evaluated as
where \(T_1^*\) is the unique root of the equation
Proof
Construct the Lyapunov function
Then from Lemma 4 one has
From Lemma 7 and Assumption 3, one has
Similarly, one has
It follows from Lemma 3 that
and
In addition,
Using the inequality skill in [18, Theorem 1], one has
Let
and
It follows from Lemma 8 that the FODMCGNNs (3) and (4) can be finite-time synchronized under the feedback controller (25) if the condition (26) is satisfied. The settling time \(t^*\) is evaluated as
where \(T_1^*\) is the unique root of the equation
The proof of Theorem 1 is completed. \(\square \)
Especially, for \(\varrho ={\widetilde{p}}\), the inequality (42) is reduced to the inequality \({}^c_{t_0}D^{\kappa }_t {\widehat{V}}_{{\widetilde{p}}}(t)\le -\varsigma {\widehat{V}}_{{\widetilde{p}}}(t)-{\widetilde{p}}n\chi \), which has the same form with the inequality (21) in [31, Lemma 5]. Using the similar skills in the proof of Theorem 1, one has the following corollary.
Corollary 4
Under Assumptions 1–3 and the feedback controller (25), the FODMCGNNs (3) and (4) can be finite-time synchronized if
The settling time \(t^*\) is evaluated by
where \(T_2^*\) is the unique root of the equation
Remark 7
In [16, Theorem 2], the fractional-order derivative of Lyapunov function \(V(t)=\sum _{k=1}^{n}|z_k(t)|^{{\widetilde{p}}}\) was estimated by the equality (13). However, the equality (13) may be not applicable and the corresponding counterexample can be found in Remark 1. Therefore, the FTS criterion in [16, Theorem 2] may also not be feasible.
Remark 8
In [16, Theorem 1], the FTS of FODMCGNNs was discussed by the following inequality \(E_{\kappa }(t)\le \frac{1}{\kappa }e^{t^{\frac{1}{\kappa }}}\). However, this inequality may be not applicable. For example, letting \(\kappa =0.322\), \(t=3\), one has \(E_{\kappa }(t)- \frac{1}{\kappa }e^{t^{\frac{1}{\kappa }}}=4.9297>0\). Therefore, the FTS criterion in [16, Theorem 1] may not be feasible.
Especially, for \(\varrho ={\widetilde{p}}=1\), motivated by [20], the following modified feedback controller with the sign function is designed to realize the FTS between the FODMCGNNs (3) and the FODMCGNNs (4):
where \(k\in \mathbb {N}_1^n\), \(\gamma \), \(\ell \), \(\eta \) are positive constants. Similar to the proof of Theorem 1, one has the following result.
Theorem 2
Under Assumptions 1–3 and the feedback controller (39), the FODMCGNNs (3) and (4) can be finite-time synchronized if
where
The settling time \(t^*\) is evaluated by
where \(T_3^*\) is the unique root of the equation
Proof
Let
Similar to the proof of Theorem 1, one has
It follows from Corollary 1 that the FODMCGNNs (3) and (4) can be finite-time synchronized under the feedback controller (39) if the condition (40) is satisfied. The settling time \(t^*\) is evaluated as
where \(T_3^*\) is the unique root of the equation
\(\square \)
From the proof of Theorem 2, one has the following corollary in terms of Lemma 5.
Corollary 5
Under Assumptions 1–3 and the feedback controller (39), the FODMCGNNs (3) and (4) can be finite-time synchronized if
and
The settling time \(t^*\) is evaluated by
4 Numerical examples
In this section, on the basis of predictor-corrector algorithm [5], three examples are presented to demonstrate the correctness and advantage of the obtained results.
Example 1
Consider the FODMCGNNs (3) and (4) with the following parameters: \(\kappa =0.95\), \(n=2\), \(t_0=0\), \(\rho =0.2\), \(\mathcal {J}_k=0.01\), \(d_k(x_k(t))=0.1\sin (x_k(t))+0.2\), \(c_k(x_k(t))=0.2\cos (x_k(t))\), \(h_i(x_i(t))=0.1\) \(\tanh (x_i(t))\), \(g_i(x_i(t-\rho ))=0.1\tanh (x_i(t-\rho ))\), \(\psi _1(t)=0.1,\psi _2(t)=-0.2\), \(\phi _1(t)=-0.1\), \(\phi _2(t)=0.2\), \(t\in [-0.2,0]\), \(k,i\in \mathbb {N}_1^2\),
By a simple calculation, one has \(\breve{a}_{11}=1.3\), \(\breve{a}_{12}=1.2\), \(\breve{a}_{21}=1.1\), \(\breve{a}_{22}=1.7\), \(\breve{b}_{11}=3.1\), \(\breve{b}_{12}=1.4\), \(\breve{b}_{21}=1.1\), \(\breve{b}_{22}=2.3\). It is easy to verify that Assumptions 1–3 are satisfied. In addition, one can gain \(H_k=G_k=0.1\), \({\bar{d}}_k=0.3\), \({\widetilde{d}}_k=0.1\), \(\zeta _k=0.06\), \({\bar{h}}_k={\bar{g}}_k=0.1\).
In the following, we show the advantage of Theorem 1 in comparison with Corollary 4 when \({\widetilde{p}}=1\). For the controller parameters \(\gamma \), \(\ell \), \(\eta \), \(\chi \) given in Table 1, by a simple calculation one has \({\widehat{V}}_{{\widetilde{p}}}(0)=0.6\), \(\varsigma =0.8240\). If one chooses different parameters \(\varrho =1.1\) and \(\varrho =1\), then one has \({\widetilde{p}}n\chi +\varsigma {\widehat{V}}_{{\widetilde{p}}}^{\varrho /{\widetilde{p}}}(0)= 2.4698>0\) and \({\widetilde{p}}n\chi +\varsigma {\widehat{V}}_{{\widetilde{p}}}(0)=2.4944>0\), respectively. Hence, the conditions (26) and (38) in Theorem 1 and Corollary 4 are satisfied, respectively. According to Theorem 1 and Corollary 4, one both has the FODMCGNNs (3) and (4) are finite-time synchronized, and the estimated settling times are \(t^*_1=0.2123\) and \(t^*_2= 0.2463\), respectively. It is obvious that \(t^*_1\) in Theorem 1 is less than \(t_2^*\) in Corollary 4. Therefore, for \({\widetilde{p}}=1\) Theorem 1 obtained by Lemma 8 is less conservative than Corollary 4 obtained by [31, Lemma 5].
Similarly, we can illustrate the advantage of Theorem 1 in comparison with Corollary 4 when \({\widetilde{p}}>1\). For the controller parameters \({\widetilde{p}}\), \(\gamma \), \(\ell \), \(\eta \), \(\chi \) given in Table 2, by a simple calculation one has \({\widehat{V}}_{{\widetilde{p}}}(0)=0.5352\), \(\varsigma =0.8931\). If one chooses different parameters \(\varrho =1.2\) and \(\varrho =1.1\), then one has \({\widetilde{p}}n\chi +\varsigma {\widehat{V}}_{{\widetilde{p}}}^{\varrho /{\widetilde{p}}}(0)= 2.6516>0\) and \({\widetilde{p}}n\chi +\varsigma {\widehat{V}}_{{\widetilde{p}}}(0)= 2.6780 >0\), respectively. Hence, the conditions (26) and (38) in Theorem 1 and Corollary 4 are satisfied, respectively. According to Theorem 1 and Corollary 4, one both has the FODMCGNNs (3) and (4) are finite-time synchronized, and the estimated settling times are \({\widetilde{t}}^*_1=0.1728\) and \({\widetilde{t}}^*_2= 0.2001\), respectively. It is obvious that \({\widetilde{t}}^*_1\) in Theorem 1 is less than \({\widetilde{t}}_2^*\) in Corollary 4. Therefore, for \({\widetilde{p}}>1\) Theorem 1 obtained by Lemma 8 is less conservative than Corollary 4 obtained by [31, Lemma 5].
To show the correctness of Theorem 1 for \({\widetilde{p}}=1\) and \({\widetilde{p}}>1\), synchronization errors of FODMCGNNs (3) and (4) with different parameters p in Example 1 are plotted in Figs. 1 and 2, respectively. One can observe that synchronization is achieved at 0.1914 and 0.1664, which are less than the estimated settling time \(t^*_1=0.2123\) and \({\widetilde{t}}^*_1=0.1728\), respectively. This validates the correctness of Theorem 1 for \({\widetilde{p}}=1\) and \({\widetilde{p}}>1\).

Synchronization errors \(z_1(t)\), \(z_2(t)\) with \({\widetilde{p}}=1\) in Example 1

Synchronization errors \(z_1(t)\), \(z_2(t)\) with \({\widetilde{p}}=1.1\) in Example 1
Example 2
Consider the FODMCGNNs (3) and (4) with the following parameters: \(\kappa =0.98\), \(n=2\), \(t_0=0\), \(\rho =0.4\), \(\mathcal {J}_k=0.02\), \(d_k(x_k(t))=0.2\cos (x_k(t))+0.1\), \(c_k(x_k(t))=0.1\sin (x_k(t))\), \(h_i(x_i(t))=0.2\) \(\tanh (x_i(t))\), \(g_i(x_i(t-\rho ))=0.2\tanh (x_i(t-\rho ))\), \(\psi _1(t)=-0.2,\psi _2(t)=0.1\), \(\phi _1(t)=0.2\), \(\phi _2(t)=-0.1\), \(t\in [-0.4,0]\), \(k,i\in \mathbb {N}_1^2\),
By a simple calculation, one has \(\breve{a}_{11}=1.2\), \(\breve{a}_{12}=1.1\), \(\breve{a}_{21}=1.2\), \(\breve{a}_{22}=1.7\), \(\breve{b}_{11}=2.1\), \(\breve{b}_{12}=1.5\), \(\breve{b}_{21}=1.6\), \(\breve{b}_{22}=2.5\). It is easy to verify that Assumptions 1–3 are satisfied. In addition, one can gain \(H_k=G_k=0.2\), \({\bar{d}}_k=0.3\), \({\widetilde{d}}_k=0.2\), \(\zeta _k=0.03\), \({\bar{h}}_k={\bar{g}}_k=0.2\).
In the following, we show the advantage of Theorem 2 in comparison with Corollary 5. For the controller parameters \(\gamma \), \(\ell \), \(\eta \) given in Table 3, by a simple calculation one has \({\widehat{V}}_{1}(0)=0.6\), \(\varsigma = 0.0535\), and \(\omega =1\), then one has \(\varsigma {\widehat{V}}_{1}(t_0)+\omega =1.0321>0\), \(1.2740=\eta >\max _{1\le k\le n}\Big \{\sum _{i=1}^{n}\Big ({\bar{d}}_iG_k \breve{b}_{ik}+{\overline{g}}_i \breve{b}_{ki}{\widetilde{d}}_k \Big )\Big \}=1.0950\), and \(1=\ell >\max _{ 1\le k\le n}\{\Xi _k\}= 0.9465\). Hence, the conditions (40) and (43)–(44) in Theorem 2 and Corollary 5 are satisfied, respectively. According to Theorem 2 and Corollary 5, one both has the FODMCGNNs (3) and (4) are finite-time synchronized, and the estimated settling times are \(t^*_3= 0.5787\) and \(t^*_4= 0.5888\), respectively. It is obvious that \(t^*_3\) in Theorem 2 is less than \(t_4^*\) in Corollary 5. Therefore, Theorem 2 obtained by Corollary 1 is less conservative than Corollary 5 obtained by Lemma 5.
To show the correctness of Theorem 2, synchronization error of FODMCGNNs (3) and (4) in Example 2 are plotted in Fig. 3. One can observe that synchronization is achieved at 0.2074, which is less than the estimated settling time \(t^*_3= 0.5787\). This validates the correctness of Theorem 2.

Synchronization errors \(z_1(t)\), \(z_2(t)\) in Example 2
Example 3
Consider the FODMCGNNs (3) and (4) with the following parameters: \(\kappa =0.97\), \(n=3\), \(t_0=0\), \(\rho =0.2\), \(\mathcal {J}_k=0.015\), \(d_k(x_k(t))=0.3\sin (x_k(t))+0.2\), \(c_k(x_k(t))=0.2\cos (x_k(t))\), \(h_i(x_i(t))=0.1\) \(\tanh (x_i(t))\), \(g_i(x_i(t-\rho ))=0.1\tanh (x_i(t-\rho ))\), \(\psi _1(t)=-0.1,\psi _2(t)=0.2,\psi _3(t)=0.15\), \(\phi _1(t)=0.1\), \(\phi _2(t)=-0.2\), \(\phi _3(t)=0.25\), \(t\in [-0.2,0]\), \(k,i\in \mathbb {N}_1^3\),
By a simple calculation, one has \(\breve{a}_{11}=1.1\), \(\breve{a}_{12}=1.2\), \(\breve{a}_{13}=5\), \(\breve{a}_{21}=1.3\), \(\breve{a}_{22}=1.8\), \(\breve{a}_{23}=6.1\), \(\breve{a}_{31}=1.2\), \(\breve{a}_{32}=1.7\), \(\breve{a}_{33}=2.5\), \(\breve{b}_{11}=2.2\), \(\breve{b}_{12}=1.6\), \(\breve{b}_{13}=4.1\), \(\breve{b}_{21}=1.7\), \(\breve{b}_{22}=2.7\), \(\breve{b}_{23}=8.3\), \(\breve{b}_{31}=1.5\), \(\breve{b}_{32}=2.6\), \(\breve{b}_{33}=4.4\). It is easy to verify that Assumptions 1–3 are satisfied. In addition, one can gain \(H_k=G_k=0.1\), \({\bar{d}}_k=0.5\), \({\widetilde{d}}_k=0.3\), \(\zeta _k=0.1\), \({\bar{h}}_k={\bar{g}}_k=0.1\).
In the following, we show the advantage of Theorem 2 in comparison with Corollary 5. For the controller parameters \(\gamma \), \(\ell \), \(\eta \) given in Table 4, by a simple calculation one has \({\widehat{V}}_{1}(0)=0.7\), \(\varsigma = 0.0535\), and \(\omega =0.3\), then one has \(\varsigma {\widehat{V}}_{1}(t_0)+\omega = 0.3374>0\), \(1=\ell >\max _{1\le k\le n}\{\Xi _k\}= 0.9465\), and \(1.8=\eta >\max _{1\le k\le n}\Big \{\sum _{i=1}^{n}\Big ({\bar{d}}_iG_k \breve{b}_{ik}+{\overline{g}}_i \breve{b}_{ki}{\widetilde{d}}_k \Big )\Big \}= 1.0950\). Hence, the conditions (40) and (43)–(44) in Theorem 2 and Corollary 5 are satisfied, respectively. According to Theorem 2 and Corollary 5, one both has the FODMCGNNs (3) and (4) are finite-time synchronized, and the estimated settling times are \(t^*_3=2.2286\) and \(t^*_4=2.3649\), respectively. It is obvious that \(t^*_3\) in Theorem 2 is less than \(t_4^*\) in Corollary 5. Therefore, Theorem 2 obtained by Corollary 1 is less conservative than Corollary 5 obtained by Lemma 5.
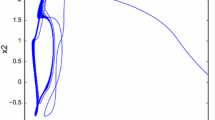
To show the correctness of Theorem 2, synchronization error of FODMCGNNs (3) and (4) in Example 3 are plotted in Fig. 4. One can observe that synchronization is achieved at 0.1557, which is less than the estimated settling time \(t^*_3= 2.8884\). This validates the correctness of Theorem 2.

Synchronization errors \(z_1(t)\), \(z_2(t)\), \(z_3(t)\) in Example 3
5 Conclusions
The FTS has been investigated for a class of FODMCGNNs. Firstly, a novel fractional-order finite-time inequality (see Lemma 8) has been developed; it generalizes the existing one and can be employed to investigate the FTS of FODSs. More importantly, it has been demonstrated theoretically that the estimated settling time is more accurate than the existing one (see Remark 5). Subsequently, based on this novel inequality, the designed feedback controllers, and the fractional-order power law inequality, two novel criteria have been obtained to ensure the FTS of the FODMCGNNs. Finally, three examples have been presented to illustrate the correctness and advantage of the derived results.
Data availability
All data generated or analyzed during this study are included in this article.
References
Abdurahman, A., Jiang, H., Hu, C.: General decay synchronization of memristor-based Cohen–Grossberg neural networks with mixed time-delays and discontinuous activations. J. Frankl. Inst. 354(15), 7028–7052 (2017)
Aghababa, M.P.: Finite-time chaos control and synchronization of fractional-order nonautonomous chaotic (hyperchaotic) systems using fractional nonsingular terminal sliding mode technique. Nonlinear Dyn. 69(1), 247–261 (2012)
Aouiti, C., Dridi, F.: New results on interval general Cohen–Grossberg BAM neural networks. J. Syst. Sci. Complex. 33(4), 944–967 (2020)
Bartle, R.G., Sherbert, D.R.: Introduction to Real Analysis. Wiley, New York (2000)
Bhalekar, S., Daftardar Gejji, V.: A predictor–corrector scheme for solving nonlinear delay differential equations of fractional order. J. Fract. Calc. Appl. 1(5), 1–9 (2011)
Chua, L.: Memristor-the missing circuit element. IEEE Trans. Circuit Theory 18(5), 507–519 (1971)
Cohen, M.A., Grossberg, S.: Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans. Syst. Man Cybern. SMC–13(5), 815–826 (1983)
Du, F., Lu, J.G.: Finite-time stability of neutral fractional order time delay systems with Lipschitz nonlinearities. Appl. Math. Comput. 375, 125079 (2020)
Du, F., Lu, J.G.: New criterion for finite-time synchronization of fractional order memristor-based neural networks with time delay. Appl. Math. Comput. 389, 125616 (2021)
Du, F., Lu, J.G.: Finite-time stability of fractional-order delayed Cohen–Grossberg memristive neural networks: a novel fractional-order delayed Gronwall inequality approach. Int. J. Gen. Syst. 51(1), 27–53 (2022)
Du, F., Lu, J.G.: New results on finite-time stability of fractional-order Cohen–Grossberg neural networks with time delays. Asian J. Control 24(5), 2328–2337 (2022)
Fan, Y., Liu, H., Zhu, Y., Mei, J.: Fast synchronization of complex dynamical networks with time-varying delay via periodically intermittent control. Neurocomputing 205, 182–194 (2016)
Filippov, A.F.: Differential Equations with Discontinuous Righthand Sides: Control Systems. Springer, Boston (1988)
Hardy, G.H., Littlewood, J.E., Pólya, G.: Inequalities. Cambridge University Press, New York (1988)
Hui, M., Wei, C., Zhang, J., Iu, H.H.C., Luo, N., Yao, R., Bai, L.: Finite-time projective synchronization of fractional-order memristive neural networks with mixed time-varying delays. Complexity 2020, 4198705 (2020)
Hui, M., Wei, C., Zhang, J., Iu, H.H.C., Luo, N., Yao, R., Bai, L.: Finite-time synchronization of memristor-based fractional order Cohen–Grossberg neural networks. IEEE Access 8, 73698–73713 (2020)
Kong, F., Rajan, R.: Finite-time and fixed-time synchronization control of discontinuous fuzzy Cohen–Grossberg neural networks with uncertain external perturbations and mixed time delays. Fuzzy Sets Syst. 411, 105–135 (2021)
Li, H.L., Hu, C., Zhang, L., Jiang, H., Cao, J.: Non-separation method-based robust finite-time synchronization of uncertain fractional-order quaternion-valued neural networks. Appl. Math. Comput. 409, 126377 (2021)
Li, J., Jiang, H., Hu, C., Alsaedi, A.: Finite/fixed-time synchronization control of coupled memristive neural networks. J. Frankl. Inst. 356(16), 9928–9952 (2019)
Li, Y., Kao, Y., Wang, C., Xia, H.: Finite-time synchronization of delayed fractional-order heterogeneous complex networks. Neurocomputing 384, 368–375 (2020)
Liu, P., Zeng, Z., Wang, J.: Asymptotic and finite-time cluster synchronization of coupled fractional-order neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 31(11), 4956–4967 (2020)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Qiao, Y., Yan, H., Duan, L., Miao, J.: Finite-time synchronization of fractional-order gene regulatory networks with time delay. Neural Netw. 126, 1–10 (2020)
Shen, Y., Xia, X.: Semi-global finite-time observers for nonlinear systems. Automatica 44(12), 3152–3156 (2008)
Strukov, D.B., Snider, G.S., Stewart, D.R., Williams, R.S.: The missing memristor found. Nature 453(7191), 80–83 (2008)
Wan, L., Liu, Z.: Multiple O\((t^{-q})\) stability and instability of time-varying delayed fractional-order Cohen–Grossberg neural networks with Gaussian activation functions. Neurocomputing 454, 212–227 (2021)
Wang, X., Wu, H., Cao, J.: Global leader-following consensus in finite time for fractional-order multi-agent systems with discontinuous inherent dynamics subject to nonlinear growth. Nonlinear Anal. Hybrid Syst. 37, 100888 (2020)
Wen, S., Wei, H., Yan, Z., Guo, Z., Yang, Y., Huang, T., Chen, Y.: Memristor-based design of sparse compact convolutional neural network. IEEE Trans. Netw. Sci. Eng. 7(3), 1431–1440 (2020)
Wu, R., Lu, Y., Chen, L.: Finite-time stability of fractional delayed neural networks. Neurocomputing 149, 700–707 (2015)
Yang, S., Hu, C., Yu, J., Jiang, H.: Exponential stability of fractional-order impulsive control systems with applications in synchronization. IEEE T. Cybern. 50(7), 3157–3168 (2020)
Yang, S., Hu, C., Yu, J., Jiang, H.: Projective synchronization in finite-time for fully quaternion-valued memristive networks with fractional-order. Chaos Solitons Fract. 147, 110911 (2021)
Yang, S., Yu, J., Hu, C., Jiang, H.: Finite-time synchronization of memristive neural networks with fractional-order. IEEE Trans. Syst. Man Cybern. Syst. 51(6), 3739–3750 (2021)
Yao, X., Liu, Y., Zhang, Z., Wan, W.: Synchronization rather than finite-time synchronization results of fractional-order multi-weighted complex networks. IEEE Trans. Neural Netw. Learn. Syst. 33(12), 7052–7063 (2022)
Zhang, L.S., Jin, Y.C., Song, Y.D.: An overview of dynamics analysis and control of memristive neural networks with delays. Acta Autom. Sin. 47(4), 765–779 (2021)
Zheng, B., Hu, C., Yu, J., Jiang, H.: Finite-time synchronization of fully complex-valued neural networks with fractional-order. Neurocomputing 373, 70–80 (2020)
Zheng, M., Li, L., Peng, H., Xiao, J., Yang, Y., Zhao, H.: Finite-time stability and synchronization for memristor-based fractional-order Cohen–Grossberg neural network. Eur. Phys. J. B 89, 204 (2016)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (No. 62073217, No. 61374030, and No. 61533012) and the China Postdoctoral Science Foundation (No. 2018M641991).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Du, F., Lu, JG. Novel methods of finite-time synchronization of fractional-order delayed memristor-based Cohen–Grossberg neural networks. Nonlinear Dyn 111, 18985–19001 (2023). https://doi.org/10.1007/s11071-023-08880-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08880-2