
Abstract
This paper is concerned with fractional-order neural networks with proportional delays. Applying inequality technique, some sufficient criteria which ensure the stability of such fractional-order neural networks with proportional delays over a finite-time interval are established. Computer simulations are carried out to illustrate our theoretical predictions. The derived results of this paper are new and complement some earlier ones.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During the past decades, the dynamics of neural networks has become one important area of research due to their various potential utilizations in pattern recognition, optimization, parallel computation and image processing and so forth [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16]. Because information processing and the inherent communication time of neurons need the finite switching speed [17], then time delay inevitably appears in neural networks. Thus numerous researchers consider the dynamical behavior of delayed neural networks and many interesting results on delayed neural networks have been reported [18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33].
For a long time, fractional calculus, which is a generalization of the traditional integer order differentiation and integral, has been payed little attention due to its complexity and the lack of the practical background [34]. Recently, many scholars find that fractional calculus is a valuable tool to describe memory and hereditary properties of dynamical processes [35, 36]. It has been applied in many areas such as applied mathematics, physics engineering and finance, etc. [37, 38]. For example, Lundstrom et al. [39] pointed out that fractional derivative provides neurons with a fundamental and general computation ability that can contribute to efficient information processing, stimulus anticipation and frequency-independent phase shifts of oscillatory neuronal firing. Anastasio [40] argued that the oculomotor integrator, which converts eye velocity into eye position commands, may be of fractional order. Anastassiou [41] mentioned that fractional-order recurrent neural networks play an important role in parameter estimation and neural network approximation taken at the fractional level resulted in higher rates of approximation. Thus it is significant to investigate the dynamical behaviors of fractional-order delayed neural networks. Recently there are some important results on delayed fractional-order neural networks. For instance, Wu and Zeng [42] studied the boundedness, Mittag–Leffler stability and asymptotical \(\alpha \)-periodicity of fractional-order fuzzy neural networks, Zhang et al. [43] analyzed the stability of fractional-order Hopfield neural networks with discontinuous activation functions, Chen et al. [44] established some sufficient conditions which ensure the stability and synchronization of memristor-based fractional-order delayed neural networks, Wang et al. [45] considered the asymptotic stability of delayed fractional-order neural networks with impulsive effects. For more knowledge on these topics, we refer the readers to [46,47,48,49,50,51,52,53,54].
Neural networks are said to be finite-time stable, if the states do not exceed some bounds within a prescribed fixed time-intervals when the initial states satisfy a specified bound [34]. We must point out that classical Lyapunov stability concepts require that the systems operate over an infinite time interval and is mainly concerned with the asymptotical behavior and seldom concerned with specified bounds on the states [34]. In many practical applications, it is important to remain the states within a certain bound during a specific time-interval. Thus the finite-time behavior of the networks is more important than the asymptotic behavior of the networks. The investigation on finite-time stability for fractional-order delayed neural networks has important theoretical value and practical significance [55,56,57,58,59].
In 2016, Chen et al. [60] considered the following fractional-order neural networks with delay
where \(0<\alpha <1,n\) corresponds to the number of units in a neural network. \(x_i(t)\) denotes the state of the ith neuron at time t, \(a_{ij}\) and \(b_{ij}\) denote the strengths of connectivity between j and i at time t and \(t-\tau \), respectively, \(\tau \) denotes the time delay required in transmitting a signal from the neuron j to the neuron i, \(I_i\) is the input to the neuron i, \(c_i\) is the charging rate for the neuron i,\(f_i(.)\) denotes activation functions. By means of inequality technique, authors established two delay-dependent sufficient criteria which ensure the stability of (1.1) over a finite-time interval.
Considering that the parameters of neural networks can not remain constants as time goes by, Wu et al. [61] considered the following delayed fractional delayed neural networks with time-varying coefficients
By using Hölder inequality, Grönwall inequality and inequality scaling techniques, authors obtained some sufficient conditions which guarantee the finite-time stability of (1.2).
Here we would like to point out that the presence of an amount of parallel pathways of axon sizes and lengths often make the neural networks possess the spatial structure. Moreover, the amount of parallel pathways will be affected by various materials and topology. Thus time delay existing in neural networks often appears as proportional [62,63,64], i.e, the proportional delay function \(\tau (t)=t-qt\) is a monotonically increasing function with the increase of time \(t>0\), where \(0<q<1\) is a constant. In real world, proportional delay plays a key role in many fields such as web quality of serve routing decision, collection of current by the pantograph of an electric locomotive [65], nonlinear dynamics [66, 67], electrodynamics [68] and probability theory on algebraic structures [69].
Stimulated by the above viewpoint, in this paper, we considered the following fractional delayed neural networks with proportional delays
where \(i\in \Lambda =\{1,2,\cdots ,n\}, q_0=\min _{i\in \Lambda }\{q_i\}, t\ge 1, 0<\alpha <1,n\) corresponds to the number of units in a neural network. \(x_i(t)\) denotes the state of the ith neuron at time t, \(a_{ij}\) and \(b_{ij}\) denote the strengths of connectivity between j and i at time t and \(t-\tau _j(t)\), respectively, \(\tau _j(t)\) denotes the time delay required in transmitting a signal from the neuron j to the neuron i, \(I_i\) is the input to the neuron i, \(c_i\) is the charging rate for the neuron i,\(f_i(.)\) denotes activation functions, \(q_{j}, j\in \Lambda \) are proportional delay factors and satisfy \(0<q_{j}\le 1\), and \(q_{j}t=t-(1-q_{j})t\), in which \(\tau _{j}(t)=(1-q_{j})t\) is the transmission delay function, and \((1-q_{j})t\rightarrow \infty \) as \(q_{j}\ne 1, t\rightarrow \infty ,\) for all \(t\ge 1.\)
For convenience, we present some notations. \(R, R^{+}\) and \(Z^{+}\) denotes the sets of all real numbers, the sets of all positive real numbers and the sets of integer numbers, respectively. Let \(||x||=\sum _{i=1}^n|x_i|\) and \(||A||=\max _{1\le j\le n}\sum _{i=1}^n|a_{ij}|\) be the Euclidean vector norm and matrix norm, respectively, where \(x_i\) and \(a_{ij}\) are the elements of the vector x and the matrix A, respectively. Let \(\widetilde{C}=\widetilde{C}([q_0,1],R^n)\) be the space of all continuous function from \([q_0,1]\) to \(R^n\).
The key object of this article is to establish some sufficient conditions for the finite-time stability for fractional-order neural networks with proportional delays. The main highlights of this article consist of four points: (i) the analysis on the finite-time stability for fractional-order neural networks with proportional delays is firstly proposed; (ii) a set of new sufficient conditions which guarantee the finite-time stability of such fractional-order neural networks with proportional delays over a finite-time interval are established; (iii) the analysis methods can be applied to investigate many other similar fractional-order neural networks with proportional delays; (iv) to the best of our knowledge, it is the first time to focus on the finite-time stability for fractional-order neural networks with proportional delays.
The remainder of the paper is organized as follows. In Sect. 2, applying the differential inequality theory and fractional-order differential equation theory, we will establish a set of sufficient conditions which guarantee the finite-time stability of (1.1). In Sect. 3, simulation experiments are put into effect to verify the availability of theoretical findings. We ends this paper with a short conclusion in Sect. 4.
2 Preliminaries
In this section, we state some definitions and lemmas which will be used in next section.
Definition 2.1
[70] The fractional integral with noninteger order \(\alpha >0\) of function u(t) is defined as follows:
where \(\Gamma (.)\) denotes the Gamma function \(\Gamma (s)=\int _0^\infty t^{s-1}e^{-t}dt.\)
Definition 2.2
[70] The Riemann–Liouville derivative of fractional order \(\alpha \) of function u(t) is defined as follows:
where \(k-1<\alpha <k\in Z^{+}.\)
Definition 2.3
[67] The Caputo derivative of fractional order \(\alpha \) of function u(t) is defined as follows:
where \(k-1<\alpha <k\in Z^{+}.\)
Lemma 2.1
[70] (Hölder inequality) Assume that \(a, b>1\) and \(\frac{1}{a}+\frac{1}{b}=1,\) if \(|f(.)|^a,|g(.)|^b\in L^1(E)\), then \(f(.)g(.)\in L^1(E)\) and
where \(L^1(E)\) is the Banach space of all Lebesgue measurable functions \(f:E\rightarrow R\) with \(\int _E|f(u)|du<\infty .\) In particular, if \(,a,b=2\) then (2.1) becomes the Cauchy–Schwarz inequality of the following form:
Lemma 2.2
[71] Let \(n\in N\) and \(u_1,u_2,\ldots ,u_n\) be nonnegative real numbers. Then for \(\rho >1\),
Lemma 2.3
[72] (Grönwall inequality) If \(u(t)\le l(t)+\int _{t_0}^tk(\theta )u(\theta )d\theta , t\in [t_0, \varrho ),\) where all the functions involved are continuous on \([t_0,\varrho ),\varrho <\infty ,\) and \(k(t)\ge 0\), then u(t) satisfies
If, in addition, l(t) is nondecreasing, then
Lemma 2.4
[73] If \(u(t)\in C^k[0,\infty )\) and \(k-1<\alpha <k\in Z^{+}\), then
-
(i)
\( D^{-\alpha }D^{-\beta }u(t)= D^{-(\alpha +\beta )}u(t),\alpha ,\beta \ge 0;\)
-
(ii)
\(D^{\alpha }D^{-\alpha }u(t)= u(t),\alpha \ge 0;\)
-
(iii)
\(D^{-\alpha }D^{\alpha }u(t)= u(t)-\sum _{j=1}^{k-1}\frac{t_j}{j!}u^{(j)}(0),\alpha \ge 0.\)
System (1.3) can be rewritten as following form:
where \(x(t)=(x_1(t),x_2(t),\ldots , x_n(t))^T\in R^n\) is the state vector of the cellular neural networks, \(0<\alpha <1\) is fractional order, \(F(x(t))=(f_1(x_1(t)), f_2(x_2(t)),\ldots ,f_n(x_n(t)))^T\), \(G(x(qt))=(g_1(x_1(q_1t)), g_2(x_2(q_2t)),\ldots ,\)\(g_n(x_n(q_nt)))^T\), \(f_j(x_j(t))\) and \(g_j(x_j(t))\) denote the activation function of the neurons, \(C=\text{ diag } (c_i), A(t)=(a_{ij}(t)),\)\( B(t)=(b_{ij}(t))\) are matrix functions respect to t, \(I_i(t)=(I_1(t),I_2(t),\ldots , I_n(t))^T\) is an external bias vector. Define the norm \(||\varphi ||=\sup _{s\in [q_0,1]}||\varphi (s)||,\) where \(\varphi \in \widetilde{C}\). Denote \(A=\sup _{t\ge 1}||A(t)||, B=\sup _{t\ge 1}||B(t)||.\)
If x(t) and y(t) are any solutions of (2.5) with different initial functions \(\varphi \in \widetilde{C}\) and \(\psi \in \widetilde{C}\), let \(y(t)-x(t)=u(t)=(u_1(t),u_2(t),\ldots , u_n(t))^T\), \(\vartheta =\phi -\varphi ,\) then we obtain one error system which takes the following form:
Definition 2.4
For a given time \(T>0\) and positive number \(\iota <\delta \), a solution \(x^*(t)\) of (2.5) is said to be finite-time stable with respect to \((\iota ,\delta ,T)\) if for any solution x(t) of (2.5), \(||x(0)-x^*(0)||\le \iota \) implies that \(||x(t)-x^*(t)||<\delta \) for all \(t\in [q_0,T]\). System (2.5) is said to be finite-time stable with respect to \((\iota ,\delta ,T)\) if any solution \(x^*(t)\) of (2.5) is finite-time stable with respect to \((\iota ,\delta ,T)\).
Throughout this paper, we also make the following assumptions:
(H1) For each \(i,j\in \Lambda ,\)\(a_{ij}(t)\) and \(b_{ij}(t)\) are bounded functions defined on \(R^{+}\).
(H2) There exist constants \(L_f\ge 0\) and \(L_g\ge 0\) such that \(|F(u)-F(v)|\le L_f|u-v|,|G(u)-G(v)|\le L_g|u-v| \) for all \(u,v\in R.\)
(H3) The following condition holds.
where
(H4) The following condition holds.
where
and \(a,b>1\) and satisfy \(\frac{1}{a}+\frac{1}{b}=1.\)
Remark 2.1
In this paper, we will deal with the finite-time stability of (1.3) with Caputo derivative.
3 Main Results
In this section, we will establish two sufficient conditions which ensure the finite-time stability of system (1.3).
Theorem 3.1
In addition to (H1)–(H3), if \(\frac{1}{2}<\alpha <1\) is satisfied, then system (2.5) is finite time stable w.r.t. \((\iota ,\delta ,T)\).
Proof
Choose the initial time \(t_0=1, u(1)=\vartheta (1)\) as the initial condition of (2.6). In view of Lemma 2.4, we can conclude that the solution of system (2.6) takes the following form:
By (H1) and (H2), we have
Applying (2.2), we get
Notice that
It follows from (3.3) and (3.4) that
In view of Lemma 2.2, we let \(n=3\) and \(\omega =2\), then it follows from (3.5) that
which leads to
Let \(\chi =\frac{6\Gamma (2\alpha -1)[(||C||+AL_f)^2+\frac{1}{q}(BL_g)^2] }{4^\alpha \Gamma ^2(\alpha )}.\) Then
By the Grönwall inequality (2.3), we have
Then
Thus when \(||\vartheta ||< \delta ,\) if (H3) is fulfilled, then \(||u(t)||<\iota .\) According to the Definition 2.4, we can conclude that system (2.5) is finite-time stable. This completes the proof of Theorem 3.1. \(\square \)
Theorem 3.2
In addition to (H1),(H2) and (H4), if \(0<\alpha <\frac{1}{2}\) is satisfied, then system (2.5) is finite time stable w.r.t. \((\iota ,\delta ,T)\).
Proof
In view of proof of Theorem 3.1, we get
Let \(a=1+\alpha ,b=1+\frac{1}{\alpha }.\) then \(a,b>1\) and \(\frac{1}{a}+\frac{1}{b}=1.\) In view of Hölder inequality (2.1), we get
Notice that
Based on (3.12) and (3.13), we have
In view of Lemma 2.2, we let \(n=3\) and \(\omega =b\), then it follows from (3.14) that
which leads to
Let
Then (3.16) can be written as
By the Grönwall inequality (2.3), we have
Then
Thus when \(||\vartheta ||< \delta ,\) if (H4) is fulfilled, then \(||u(t)||<\iota .\) According to the Definition 2.4, we can conclude that system (2.5) is finite-time stable. This completes the proof of Theorem 3.2. \(\square \)
Remark 3.1
Chen et al. [60] investigated the finite-time stability of a class of fractional order neural networks with constant delay and constant coefficients, Wu et al. [61] studied the finite-time stability of a class of fractional order neural networks with constant delay and time-varying coefficients. All the models considered in [60, 61] does not involves proportional delays. In this paper, we studies the the finite-time stability of cellular neural networks with proportional delays. All the obtained results in [60, 61] can not be applicable to the model (1.3) to obtain the finite-time stability of system (1.3). Up to now, there are no results on the finite-time stability of cellular neural networks with proportional delays. From the viewpoint, our results on finite-time stability for cellular neural networks with proportional delays are essentially new and complement earlier publications to some degree.
Remark 3.2
Proportional delay, which is unbounded, differs from the constant delay and bounded time-varying delay. Proportional delay and unbounded distributed delay are unbounded, but unbounded distributed delay usually requires the delay kernel function \(\kappa _{ij}: R\rightarrow R\) satisfies \(\int _0^\infty \kappa _{ij}(x)dx=1, \int _0^\infty x\kappa _{ij}(x)dx<\infty ,i,j=1,2,\ldots ,n,\) which make the distributed delay easier to deal with, proportional delay has no the restrict condition. Thus it is more difficult to handle the proportional delay than to handle the distributed delay in dynamical systems.
Remark 3.3
Li, Yang, Shi and Ho [74,75,76] considered the finite-time synchronization of delayed neural networks and chaotic systems. All the papers do not involve the fractional-order proportional delays. In this paper, we investigate the finite-time stability for fractional-order neural networks with proportional delays. All the derived results in [74,75,76] can not be applied to (1.3) to obtain the finite-time stability for (1.3). From the viewpoint, the main results of this article on finite-time stability for fractional-order neural networks with proportional delays are essentially innovative.
Remark 3.4
Theorems 3.1 and 3.2 are correct for all kinds of the fractional derivatives.
4 Examples
In this section, we will give two examples to verify the correctness of our main results obtained in previous section. The choice of all the parameters in the following examples is based on the practical implication of neural networks.
Example 4.1
Considering the following fractional-order neural networks with proportional delays
where \(t>1, f_1(u)=f_2(u)=g_1(u)=g_2(u)=0.5(|u+1)-|u-1|),\alpha =0.6, c_1=0.2,c_2=0.3, a_{11}(t)=0.1\sin t, a_{12}(t)=0.3\sin t, a_{21}(t)=0.4\cos t, a_{22}(t)=0.5\cos t, b_{11}(t)=0.5\sin t, b_{12}(t)=0.5\cos t, b_{21}(t)=0.3\cos t, b_{22}(t)=0.2\cos t, I_1(t)=0.2\sin t, I_2(t)=0.4\sin t, q_1=0.2,q_2=0.1\) Then \(L_f=L_g=1, ||C||=0.3, A=0.5, B=0.5, \chi =5.5470\). Let \(\delta =0.1,\iota =1.\) We have \(\sqrt{ \frac{6+3\chi e^{(\chi +2) t}}{\chi +2}}<\frac{\iota }{\delta }\) and \(T=0.7024.\) Thus all the conditions in Theorem 3.1 are satisfied, then system (4.1) is finite time stable w.r.t. \(\{1,0.1,1\}\). This result can be shown in Figs. 1 and 2.

Numerical solutions of system (4.1): times series of \(x_1\)

Numerical solutions of system (4.1): times series of \(x_2\)
Example 4.2
Considering the following fractional-order neural networks with proportional delays
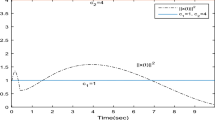
where \(t>1, f_1(u)=f_2(u)=g_1(u)=g_2(u)=\tanh (u),\alpha =0.3, c_1=0.1,c_2=0.2, a_{11}(t)=0.2|\sin 2t|, a_{12}(t)=0.1|\sin 2t|, a_{21}(t)=0.4|\cos 2t|, a_{22}(t)=0.1|\cos 2t|, b_{11}(t)=0.3|\sin 2t|, b_{12}(t)=0.5|\cos 2t|, b_{21}(t)=0.3|\cos 2t|,\)\( b_{22}(t)=0.6|\cos 2t|, I_1(t)=0.2\sin ^2 t, I_2(t)=0.4\cos ^2 t, q_1=0.4,q_2=0.5\) Then \(L_f=L_g=1, ||C||=0.2, A=0.4, B=0.6, \chi ^*=4.7714\). Let \(\delta =0.2,\iota =1.5.\) We have \(\root b \of {\frac{b3^{b-1}+3^{b-1}\chi ^*e^{(\chi ^*+b)t}}{b+\chi ^*}}<\frac{\iota }{\delta } \) and \(T=0.5477.\) Thus all the conditions in Theorem 3.2 are satisfied, then system (4.2) is finite time stable w.r.t. \(\{1,0.2,1.5\}\). This result can be shown in Figs. 3 and 4.

Numerical solutions of system (4.2): times series of \(x_1\)

Numerical solutions of system (4.2): times series of \(x_2\)
5 Conclusions
The finite-time stability of fractional-order neural networks can effectively characterize the dynamical behavior of neural networks. Thus it has been widely investigated by numerous authors in recent years. In this article, we have discussed finite-time stability for fractional-order neural networks with proportional delays. By means of the differential inequality theory, fractional-order differential equation theory, some sufficient criteria which guarantee the stability of such fractional-order neural networks with proportional delays over a finite-time interval are established. It is shown that these sufficient conditions are easily tested only by very simple algebra operation. The derived results complement some earlier publications (for example [60, 61]). Furthermore, the research approach of this article can be transplanted to investigate some other similar fractional-order neural networks with proportional delays.
References
Ban JC, Chang CH (2016) When are two multi-layer cellular neural networks the same? Neural Netw 79:12–19
Wang LX, Zhang JM, Shao HJ (2014) Existence and global stability of a periodic solution for a cellular neural network. Commun Nonlinear Sci Numer Simul 19(9):2983–2992
Huang CX, Cao J, Cao JD (2016) Stability analysis of switched cellular neural networks: a mode-dependent average dwell time approach. Neural Netw 82:84–99
Song QK, Yan H, Zhao ZJ, Liu YR (2016) Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw 79:108–116
Yu YH (2016) Global exponential convergence for a class of HCNNs with neutral time-proportional delays. Appl Math Comput 285:1–7
Yao LG (2017) Global exponential convergence of neutral type shunting inhibitory cellular neural networks with D operator. Neural Process Lett 45:401–409
Xu CJ, Wu YS (2016) On almost automorphic solutions for cellular neural networks with time-varying delays in leakage terms on time scales. J Intell Fuzzy Syst 30:423–436
Xu CJ, Zhang QM, Wu YS (2016) Existence and exponential stability of periodic solution to fuzzy cellular neural networks with distributed delays. Int J Fuzzy Syst 18(1):41–51
Xu CJ, Li PL, Pang YC (2016) Exponential stability of almost periodic solutions for memristor-based neural networks with distributed leakage delays. Neural Comput 28:2726–2756
Xu CJ (2016) Existence and exponential stability of anti-periodic solution in cellular neural networks with time-varying delays and impulsive effects. Electron J Differ Equ 2016(2):1–14
Balasubramaniam P, Ali MS, Arik S (2010) Global asymptotic stability of stochastic fuzzy cellular neural networks with multiple time-varying delays. Expert Syst Appl 37(12):7737–7744
Balasubramaniam P, Kalpana M, Rakkiyappan R (2011) Existence and global asymptotic stability of fuzzy cellular neural networks with time dealy in the leakage term and unbounded distributed delays. Circuits Syst Signal Process 30(6):1595–1616
Yang WG (2014) Periodic solution for fuzzy Cohen-Grossberg BAM neural networks with both time-varying and distributed delays and variable coefficients. Neural Process Lett 40(1):51–73
Xu CJ, Li PL (2016) Existence and exponentially stability of anti-periodic solutions for neutral BAM neural networks with time-varying delays in the leakage terms. J Nonliner Sci Appl 9(3):1285–1305
Xu CJ, Zhang QM, Wu YS (2014) Existence and stability of pseudo almost periodic solutions for shunting inhibitory cellular neural networks with neutral type delays and time-varying leakage delays. Netw Comput Neural Syst 25(4):168–192
Song QK, Zhao ZJ (2016) Stability criterion of complex-valued neural networks with both leakage delay and time-varying delays on time scales. Neurocomputing 171:179–184
Stamova IM, Ilarionov R (2010) On global exponential stability for impulsive cellular neural networks with time-varying delays. Comput Math Appl 59(11):3508–3515
Tyagi S, Abbas S, Pinto M, Sepúlveda D (2016) WITHDRAWN: Uniform Euler approximation of solutions of fractional-order delayed cellular neural network on bounded intervals. Comput Math Appl. https://doi.org/10.1016/j.camwa.2016.04.007
Abdurahman A, Jiang HJ, Teng ZD (2016) Finite-time synchronization for fuzzy cellular neural networks with time-varying delays. Fuzzy Sets Syst 297:96–111
Wang P, Li B, Li YK (2015) Square-mean almost periodic solutions for impulsive stochastic shunting inhibitory cellular neural networks with delays. Neurocomputing 167:76–82
Rakkiyappan R, Sakthivel N, Park JH, Kwon OM (2013) Sampled-data state estimation for Markovian jumping fuzzy cellular neural networks with mode-dependent probabilistic time-varying delays. Appl Math Comput 221:741–769
Balasubramaniam P, Kalpana M, Rakkiyappan R (2011) Existence and global asymptotic stability of fuzzy cellular neural networks with time delay in the leakage term and unbounded distributed delays. Circuits Syst Signal Process 30(6):1595–1616
Wan Y, Cao JD, Wen GH, Yu WW (2016) Robust fixed-time synchronization of delayed Cohen–Grossberg neural networks. Neural Netw 73:86–94
Cao JD, Li RX (2017) Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci China Inf Sci 60(3):032201. https://doi.org/10.1007/s11432-016-0555-2
Bao HB, Park JH, Cao JD (2016) Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw 81:16–28
Bao HB, Cao JD (2016) Finite-time generalized synchronization of nonidentical delayed chaotic systems. Nonlinear Anal Model Control 21(3):306–324
Liu Y, Zhang DD, Lou JG, Lu JQ, Cao JD (2018) Stability analysis of quaternion-valued neural networks: Decomposition and direct approaches. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2017.2755697 (in press)
Liu Y, Zhang DD, Lu JQ, Cao JD (2016) Global \(\mu \)-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Inf Sci 360:273–288
Liu Y, Zhang DD, Lu JQ (2017) Global exponential stability for quaternion-valued recurrent neural networks with time-varying delays. Nonlinear Dyn 87(1):553–565
Liu Y, Xu P, Lu JQ, Liang JL (2016) Global stability of Clifford-valued recurrent neural networks with time delays. Nonlinear Dyn 84(2):767–777
Yang RJ, Wu B, Liu Y (2015) A Halanay-type inequality approach to the stability analysis of discrete-time neural networks with delays. Appl Math Comput 265:696–707
Tao W, Liu Y, Lu JQ (2017) Stability and \(L_2\)-gain analysis for switched singular linear systems with jumps. Math Methods Appl Sci 40(3):589–599
Li XD, Song SJ (2013) Impulsive control for existence, uniqueness and global stability of periodic solutions of recurrent neural networks with discrete and continuously distributed delays. IEEE Trans Neural Netw Learn Syst 24:868–877
Wu RC, Hei XD, Chen LP (2013) Finite-time stability of fractional-order neural networks with delay. Commun Theor Phys 60:189–193
Miller KS, Ross B (1993) An introduction to the fractional calculus and fractional differential equations. Wiley, New York
Sabatier J, Agrawal OP, Machado J (2007) Theoretical development and applications. Advance in fractional calculus. Springer, Berlin
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Buter PL, Westphal U (2000) An introduction to fractional calculus. World Scientific, Singapore
Lundstrom BN, Higgs MH, Spain WJ, Fairhall AL (2008) Fractional differentiation by neocortical pyramidal neurons. Nat Neurosci 11(11):1335–1342
Anastasio TJ (1994) The fractional-order dynamics of brainstem vestibulo-oculomotor neurons. Biol Cybern 72(1):69–79
Anastassiou GA (2012) Fractional neural network approximation. Comput Math Appl 64(6):1655–1676
Wu AL, Zeng ZG (2016) Boundedness, Mittag–Leffler stability and asymptotical \(\alpha \)-periodicity of fractional-order fuzzy neural networks. Neural Netw 74:73–84
Zhang S, Yu YG, Wang Q (2016) Stability analysis of fractional-order Hopfield neural networks with discontinuous activation functions. Neurocomputing 171:1075–1084
Chen LP, Wu RC, Cao JD, Liu JB (2015) Stability and synchronization of memristor-based fractional-order delayed neural networks. Neural Netw 71:37–44
Wang F, Yang YQ, Hu MF (2015) Asymptotic stability of delayed fractional-order neural networks with impulsive effects. Neurocomputing 154:239–244
Huang X, Zhao Z, Wang Z, Lia YX (2012) Chaos and hyperchaos in fractional-order cellular neural networks. Neurocomputing 94:13–21
Yu J, Hu C, Jiang H (2012) \(\alpha \)-Stability and \(\alpha \)-synchronization for fractional-order neural networks. Neural Netw 35:82
Chen L, Chai Y, Wu R, Ma T, Zhai H (2013) Dynamic analysis of a class of fractional-order neural networks with delay. Neurocomputing 111:190–194
Song C, Cao JD (2014) Dynamics in fractional-order neural networks. Neurocomputing 142:494–498
Li MM, Wang JR (2018) Exploring delayed Mittag–Leffler type matrix function to study finite time stability of fractional delay differential equations. Appl Math Comput 324:254–265
Zhang XG, Liu LS, Wu YH (2012) Existence results for multiple positive solutions of nonlinear higher order perturbed fractional differential equations with derivatives. Appl Math Comput 219(4):1420–1433
Zhang XG, Liu LS, Wu YH (2012) The eigenvalue problem for a singular higher order fractional differential equation involving fractional derivatives. Appl Math Comput 218(17):8526–8536
Zhang LH, Zheng ZW (2017) Lyapunov type inequalities for the Riemann–Liouville fractional differential equations of higher order. Adv Differ Equ 2017:270. https://doi.org/10.1186/s13662-017-1329-5
Feng QH, Meng FW (2016) Explicit solutions for space-time fractional partial differential equations in mathematical physics by a new generalized fractional Jacobi elliptic equation-based sub-equation method. Optik 127:7450–7458
Li MM, Wang JR (2017) Finite time stability of fractional delay differential equations. Appl Math Lett 64:170–176
Hei XD, Wu RC (2016) Finite-time stability of impulsive fractional-order systems with time-delay. Appl Math Model 40(7C8):4285–4290
Ma YJ, Wu BW, Wang YE (2016) Finite-time stability and finite-time boundedness of fractional order linear systems. Neurocomputing 173(3):2076–2082
Yang XJ, Song QK, Liu YR, Zhao ZJ (2015) Finite-time stability analysis of fractional-order neural networks with delay. Neurocomputing 152:19–26
Efimov D, Polyakov A, Fridman E, Perruquetti W, Richard JP (2014) Comments on finite-time stability of time-delay systems. Automatica 50(7):1944–1947
Chen LP, Liu C, Wu RC, He YG, Chai Y (2016) Finite-time stability criteria for a class of fractional-order neural networks with delay. Neural Comput Appl 27:549–556
Wu RC, Lu YF, Chen LP (2015) Finite-time stability of fractional delayed neural networks. Neurocomputing 149:700–707
Zhou LQ (2015) Novel global exponential stability criteria for hybrid BAM neural networks with proportional delays. Neurocomputing 161:99–106
Hien LV, Son DT (2015) Finite-time stability of a class of non-autonomous neural networks with heterogeneous proportional delays. Appl Math Comput 251:14–23
Zhou LQ, Zhang YY (2016) Global exponential stability of a class of impulsive recurrent neural networks with proportional delays via fixed point theory. J Frankl Inst 353(2):561–575
Ockendon JR, Tayler AB (1971) The dynamics of a current collection system for an electric locomotive. Proc R Soc Lond Ser A Math Phys Sci 322(1551):447–468
Song XL, Zhao P, Xing ZW, Peng JG (2016) Global asymptotic stability of CNNs with impulses and multi-proportional delays. Math Methods Appl Sci 39(4):722–733
Derfel GA (1982) On the behaviour of the solutions of functional and functional-differential equations with several deviating arguments. Ukr Math J 34:286–291
Fox L, Ockendon DF, Tayler AB (1971) On a functional-differential equations. J Inst Math Appl 8(3):271–307
Derfel GA (1990) Kato problem for functional-differential equations and difference Schrodinger operator. Oper Theory 46:319–321
Podlubny I (1999) Fractional differential equations. Academic, New York
Kuczma M (2009) An introduction to the theory of functional equations and inequalities: Cauchy’s equation and Jensen’s inequalities. Birkhauser, Basel
Corduneanu C (1971) Principles of differential and integral equations. Allyn and Bacon, Boston, MA
Li CP, Deng WH (2007) Remarks on fractional derivatives. Appl Math Comput 187:777–784
Li YC, Yang XS, Shi L (2016) Finite-time synchronization for competitive neural networks with mixed delays and nonidentical perturbations. Neurocomputing 85:242–253
Yang XS, Ho DWC (2016) Synchronization of delayed memristive neural networks: robust analysis approach. IEEE Trans Cybern 46(12):3377–3387
Shi L, Yang XS, Li YC, Feng ZZ (2016) Finite-time synchronization of nonidentical chaotic systems with multiple time-varying delays and bounded perturbations. Nonlinear Dyn 83(1–2):75–87
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by National Natural Science Foundation of China (No. 61673008) and Project of High-level Innovative Talents of Guizhou Province ([2016]5651) and Major Research Project of The Innovation Group of The Education Department of Guizhou Province ([2017]039), Project of Key Laboratory of Guizhou Province with Financial and Physical Features ([2017]004) and the Foundation of Science and Technology of Guizhou Province ([2018]1025 and [2018]1020).
Rights and permissions
About this article

Cite this article
Xu, C., Li, P. On Finite-Time Stability for Fractional-Order Neural Networks with Proportional Delays. Neural Process Lett 50, 1241–1256 (2019). https://doi.org/10.1007/s11063-018-9917-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-018-9917-2