
Abstract
Recently, it has been observed that the weather is changing constantly because of global warming. The government is urging everyone, including scientists and the general public, to help address the severe challenges caused by climate change. Addressing the pivotal issue of carbon emissions stemming from transportation, this manuscript delves into the development of an efficient and coordinated management system. The proposed solution involves a green solid transportation system employing a two-stage network to implement a carbon cap and trade policy. A mathematical model is introduced to underscore the significance of this approach. Because of market fluctuations, supply and demand constraints are not always the same. Therefore, a two-folded uncertainty is included in this article for a better realistic outcome. A ranking defuzzification approach is employed to convert this uncertainty into a deterministic measure. Two illustrative numerical case studies are presented to underscore the effectiveness and feasibility of the proposed approaches. Then, three multi-objective techniques are employed to obtain Pareto-optimal solutions for the addressed problem. After that, a comparative study among these techniques is introduced and a sensitivity analysis is added to explore how the objective functions are influenced by potential changes in supply and demand. In conclusion, the paper offers important insights and identifies areas for future research in this field.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The transportation industry involves moving goods using various vehicles and organizational strategies to transfer items from one place to another. This complex process includes a variety of technologies, such as infrastructure, energy, and transportation logistics, as well as the management of time and effort. Essentially, the transportation problem, a logistics-focused linear programming concept, reflects the challenges faced in everyday operations.
The Solid Transportation Problem (STP) represents an evolution of the conventional Transportation Problem (TP), distinguishing itself by considering three parameters in its requirement set- supply, demand, and the mode of transportation or conveyance. In the ever-evolving landscape of today's business environment, characterized by escalating competition, organizations continuously strive to enhance the delivery of goods to customers, emphasizing both timeliness and cost-effectiveness. Enter the realm of the Multi-Objective Solid Transportation Problem (MOSTP), wherein the optimization challenge extends beyond a singular objective. In this scenario, the STP is confronted with the task of simultaneously optimizing multiple objectives. As organizations navigate this multifaceted landscape, the pursuit of efficiency and effectiveness in transportation becomes increasingly paramount.
Within the field of TP, there arises the occasional necessity to consider the intermediate storage of items in warehouses before their final transport to the destination. Recognizing this, Decision-Makers (DMs) introduce the concept of a two-stage network in the transportation problem to optimize profit. A TP is characterized as two-fold when it involves two distinct stages: the first stage entails the movement of products from manufacturing plants to warehouses, while the second stage involves transporting the goods from warehouses to their final destinations. The proposed two-stage network is illustrated in Fig. 1. In the figure, \(P1,P2, \ldots ,Pn\) are the sources or manufacturing plants, from which goods are transported to the warehouses, \(D1,D2, \ldots ,Dn\), in the first stage. In the next stage, goods are delivered to the destinations or customers, namely \(C1,C2, \ldots ,Cn\), from the warehouses. This innovative approach seeks to enhance decision-making processes and maximize overall efficiency.

Schematic view of a two-stage network (proposed by the authors)
Carbon dioxide (CO2) gets into the air mostly from burning fuels and the decomposition of wood and plants. The increase in CO2 levels is mainly attributed to the extensive use of fossil fuels such as coal and oil, particularly in transportation, a trend that gained momentum in the nineteenth century. Nowadays, the sources of CO2 emissions have increased a lot, along with deforestation, which also contributes to the increasing CO2 concentration in the air.
Carbon emissions resulting from the transportation of goods using various modes like trucks, buses, and personal vehicles are a significant factor in the overall CO2 footprint. Figure 2 illustrates the CO2 emissions diagram, providing insight into the complex dynamics of emissions from different transportation modes. This research delves into the various facets of carbon emissions, examining their origins and effects, with specific attention given to contributions from transportation.

(Source: FOEN-Greenhouse gas inventory)
Carbon emissions through transport
The primary contributor to global warming is the rapid motion of transportation, which releases a substantial volume of carbon emissions. In response, the government is actively endorsing various initiatives to reduce carbon footprints, with the cap, and trade policy (CTP) emerging as a widely embraced strategy. Under the CTP framework, businesses are initially assigned emissions limits, determined by regulatory standards, and are subsequently allowed to trade (buy or sell) these emissions limits in the carbon market. Governments and policymakers advocate for specific strategies, such as carbon emissions taxes and tradable insurance, to effectively mitigate carbon discharges. In this approach, a finite number of annual permits are issued, granting businesses the authority to release a designated quantity of CO2. The aggregate allowance serves as the prescribed “cap” on emissions. Companies must follow regulations regarding the amount of carbon they can release. If they release too much, they have to pay fines. However, enterprises have the option to support carbon offset initiatives, thereby augmenting their carbon allowance. If a company's carbon emissions fall below the government-mandated cap, no fines are levied by policymakers, incentivizing compliance with emissions standards. This study scrutinizes the differences of such strategies, assessing their efficacy and exploring avenues for further improvement in the field of carbon emissions reduction policy. To address these complex challenges, this research aims to find answers to the following fundamental questions:
-
1.
How can the STP be effectively addressed within a two-stage network framework, considering the complexities introduced by the CTP?
-
2.
In a type-2 Pythagorean fuzzy environment, how does the ambiguity inherent in supply and demand constraints impact the practical implementation of carbon emissions reduction strategies in the context of the STP?
-
3.
What are the key considerations and trade-offs involved in the multi-objective optimization of a transportation system under a CTP, considering environmental impact, economic efficiency, and regulatory compliance?
In pursuit of answers to these questions, this study introduces several key innovations:
-
(a)
The STP within a two-stage network, coupled with the implementation challenges posed by the CTP, can be effectively addressed by developing an integrated mathematical model. This model aims to optimize transportation efficiency while adhering to carbon emissions constraints, providing a framework for decision-makers to navigate complexities in a dynamically changing regulatory landscape.
-
(b)
In a type-2 Pythagorean fuzzy environment, the inherent ambiguity in supply and demand constraints significantly influences the practical implementation of carbon emissions reduction strategies in the STP. A comprehensive analysis is needed to understand how these uncertainties impact decision-making processes, providing insights into adapting transportation frameworks to the fluctuations inherent in market dynamics.
-
(c)
The multi-objective optimization of a transportation system under a CTP necessitates a careful consideration of key factors. Balancing environmental impact, economic efficiency, and regulatory compliance involves trade-offs. DMs should strategically weigh these objectives, exploring innovative approaches that harmonize diverse elements to achieve a sustainable and efficient transportation system within the regulatory framework.
This study exclusively focuses on a transportation mode, specifically the roadway, given its comparatively higher carbon emissions levels. Utilizing an uncertain model, the objective is twofold: to reduce carbon emissions and optimize the overall transportation cost. Here not only the carbon emissions cost is considered but also the total transportation cost, conveyance time, and deterioration rate. This holistic approach seeks to strike a harmonious balance between environmental sustainability and economic efficiency.
1.1 Research background
In the contemporary era, TP assumes a pivotal role globally, particularly in high-competition markets, where the focus is on reducing transportation costs, minimizing time, and providing superior services to maximize profitability. In the traditional TP, products are transported from source to destination, and the total transportation cost is contingent upon the quantity of products to be distributed. Initially introduced by Hitchcock (1941), the traditional TP, however, falls short in addressing real-life application challenges. Recognizing the need for enhanced numerical structures, researchers observed that the simplex procedure originally applied to the transportation problem, could be significantly optimized. Charnes and Cooper (1954) developed the stepping stone method as an alternative approach to the simplex method, leading to more efficient computations. Subsequent contributions by Kantorovich (1960), and Balinski (1961) further refined the understanding of the transportation problem. Dantzig (1963) applied the simplex procedure to solve the linear programming problem and obtain feasible solutions.
STP introduced in this context holds significant implications for real-life applications, influencing decisions about source locations, arrangement, manufacturing, market distribution, and investment. The conceptualization of STP was first implemented by Shell (1955), followed by subsequent research contributions from Haley (1962). Bit et al. (1993) presented a fuzzy programming approach to address the multi-objective solid transportation problem. Das et al. (2019) further developed STP addressing a challenge where the environment is characterized by uncertainty. In understanding the multi-objective transportation model, a closer examination reveals a two-stage process involved in delivering products from source to destination, managed by retailers or distributors. Research scholars such as Raj and Rajendran (2012), Hashmi et al. (2019), Bera and Mondal (2020) formulated two-stage TP and also some researchers like Das et al. (2016), Midya et al. (2021) worked on multi-stage TP.
Yang and Liu (2007) addressed the fuzzy fixed charge STP, which involves the transportation of solid materials while considering fixed charges associated with certain transportation routes or facilities. Ojha et al. (2010) presented an STP model that considers fixed charges, variable transportation costs, and price discounts. Elhedhli and Merrick (2012) described the concept of designing a sustainable and environmentally friendly supply chain network with the primary objective of reducing carbon emissions. Song and Leng (2012) delved into the impact of carbon emissions policies on inventory management decisions, offering guidance on balancing economic considerations and environmental sustainability goals using a genetic algorithm. Ding et al. (2013) investigated the issue of carbon emissions resulting from transportation activities in China. They provided an analysis of the scale and sources of carbon emissions in the transportation sector within China. Additionally, the article discussed potential strategies and measures for reducing these emissions. Ebrahimnejad (2014) presented a simplified method for addressing fuzzy transportation problems. It focuses on solving transportation problems in which input data or parameters are represented using generalized trapezoidal fuzzy numbers. Maity and Roy (2019) proposed a novel method for addressing the type-2 fuzzy TP. Their work contributes to the field by introducing a new approach to tackle this.
Bouchery et al. (2016) demonstrated the methodology for acquiring trade-offs between costs and carbon emissions within the framework of sustainable operations. Turken et al. (2017) explored analytical techniques to assess carbon trade-off policies, providing insights into optimal facility location and capacity acquisition decisions. Wu et al. (2017) described how the economic implications of carbon emissions and environmental concerns affect the choices made by manufacturing companies in terms of where they produce and how they produce. The study investigates the strategies and decisions of various factors, such as regulatory policies, environmental sustainability goals, and carbon pricing mechanisms etc. Chen et al. (2017) explored the application of uncertain goal programming models to address the bi-criteria solid transportation problem. Chai et al. (2018) investigated the relationship between carbon cap and trade mechanisms and the promotion of remanufacturing as an environmentally friendly business practice. Sengupta et al. (2018) addressed an STP, emphasizing carbon emissions reduction using a gamma type-2 defuzzification method to handle uncertainty in decision-making related to transportation and emissions.
Roy et al. (2019) introduced a mathematical model designed to address a complex logistics problem characterized by multiple objectives, numerous items, fixed charges, and twofold uncertainty. Das et al. (2020) proposed a framework aiming to enhance transportation efficiency by addressing challenges related to location selection, transportation routing, and policy compliance. AnithaKumari et al. (2021) presented mathematical models and optimization techniques to find optimal solutions for solid transportation problems that involve integer values and fully rough intervals. Mondal and Roy (2022) provided an approach that offers a sophisticated mathematical framework that integrates fuzzy set theory, non-additive measures, and sustainability principles to support decision-making in supply chain management under conditions of uncertainty and risk. Ghosh et al. (2022a) addressed an STP with budget constraints while considering carbon emissions in a neutrosophic environment. Ghosh et al. (2022b) conducted a study on an MOSTP, with a specific emphasis on preservation technology. They employed Pythagorean fuzzy sets to handle model’s uncertainty and optimize solutions across multiple objectives. In a study by Karthick and Uthayakumar (2022), a mathematical model is presented, incorporating concepts from the closed-loop supply chain, carbon emission considerations, pricing decisions, and intuitionistic fuzzy logic. Ghosh et al. (2022c) made the application of carbon mechanisms to address the challenges of sustainable multi-objective solid transportation in the context of waste management. It also focused on optimizing the transportation of solid waste materials while considering multiple objectives such as cost-effectiveness, environmental sustainability. Additionally, it mentioned a Pythagorean hesitant fuzzy environment, which suggests that the framework involved mathematical methods to deal with uncertainty and fuzziness in decision-making related to waste management and transportation. Das et al. (2022) explored the effects of carbon tax policies on a multi-objective logistics model with a focus on sustainable development which involved the transportation and management of solid materials. Astanti et al. (2022) described a framework that optimizes inventory levels, transportation routes, and supplier relationships while navigating constraints imposed by the carbon cap-and-trade policy. Ren et al. (2022) tackled the challenge of jointly optimizing scheduling decisions, transportation time, and resource constraints in a dynamic and flexible manufacturing environment. The resolution of such a problem promises more efficient production processes, reduced lead times, and improved resource utilization. Ghosh et al. (2023a, b) described the carbon policies, sustainability goals, transportation logistics, and waste management in a multi-objective context. Mondal et al. (2023) proposed a computational model for solving a complex and multi-faceted transportation problem, emphasizing sustainability and incorporating intuitionistic fuzzy logic to address uncertainty. Das et al. (2023) addressed a complex problem involving multi-objective decision-making in solid transportation and location selection, considering variable carbon emissions in inventory management. Mirzaee et al. (2023) presented a mathematical or analytical model addressing green supplier selection, cap-and-trade mechanisms, providing practical insights for businesses aiming to make their supply chains more environmentally friendly and efficient. Agnihotri and Dhodiya (2023) aimed to provide a more effective and efficient method for solving complex transportation problems with multiple conflicting objectives. Table 1 addresses all the abbreviations which are utilized in this study.
1.2 Research gap, contribution and novelty
This study identifies the research gaps outlined in Table 2 and addresses them by presenting the following contributions:
-
(a)
Upon reviewing the research works of Elhedhli and Merrick (2012), Ding et al. (2013), Chai et al. (2018), Bera and Mondal (2020), Ren et al. (2022), and Mirzaee et al. (2023), it is observed that these authors conducted their studies without considering transportation costs. The current study addresses this gap by developing the proposed model and taking transportation costs into account.
-
(b)
The works cited, including Ojha et al. (2010), Elhedhli and Merrick (2012), Raj and Rajendran (2012), Ding et al. (2013), Ebrahimnejad (2014), Roy et al. (2017), Chai et al. (2018), Hashmi et al. (2019), Bera and Mondal (2020), AnithaKumari et al. (2021), Karthick and Uthayakumar (2022), Ghosh et al. (2022c), Mondal et al. (2023), and Mirzaee et al. (2023), did not mention transportation time. The current study addresses this gap by developing the proposed model, considering transportation time, and aiming to minimize transportation time for social satisfaction.
-
(c)
Upon analyzing the frameworks presented by Raj and Rajendran (2012), Ding et al. (2013), Ebrahimnejad (2014), Roy et al. (2017, 2019), Chai et al. (2018), Hashmi et al. (2019), Das and Roy (2019), Das et al. (2020), Bera and Mondal (2020), AnithaKumari et al. (2021), Karthick and Uthayakumar (2022), Astanti et al. (2022), Ren et al. (2022), and Mondal et al. (2023), it is observed that the authors did not consider convenience mode. The current project enhances this body of work by considering different vehicles.
-
(d)
Upon comparing the works of Ojha et al. (2010), Raj and Rajendran (2012), Ebrahimnejad (2014), Roy et al. (2017), Hashmi et al. (2019), Das et al. (2020), Bera and Mondal (2020), Karthick and Uthayakumar (2022), Ren et al. (2022), Das et al. (2023), Mondal et al. (2023), and Ghosh et al. (2023b), it is noticeable that there is no mention of carbon cap and trade policy, which is a crucial aspect in recent times. To reduce carbon emissions, the proposed study implements a carbon cap and trade policy, considering existing research.
-
e)
The researchers [cf. Ojha et al. (2010), Elhedhli and Merrick (2012), Ding et al. (2013), Ebrahimnejad (2014), Chai et al. (2018), Roy et al. (2019), Das and Roy (2019), Das et al. (2020, 2023), AnithaKumari et al. (2021), Karthick and Uthayakumar (2022), Astanti et al. (2022), Ren et al. (2022), Mirzaee et al. (2023) and Ghosh et al. (2023b)] did not explore the concept of two-stage transportation. This study focuses on two-stage transportation which is an integral part of transportation.
-
f)
The existing literature indicates that while some authors, like Ghosh et al. (2022b, c) have worked on Pythagorean fuzzy logic, only Mondal and Roy (2022) have considered a green supply chain within a type-2 Pythagorean fuzzy environment. This work incorporates such uncertainty to address supply and demand fluctuations.
A gap exists in the current research landscape concerning STP, two-stage network configurations, multi-objective optimization, and carbon buy and sell insurance within a type-2 fuzzy environment. To fill this gap, this study introduces a mathematical framework. It combines considerations of two-stage networks, the mechanics of buying and selling insurance, and the specifics of a type-2 Pythagorean fuzzy environment. The primary contributions of this research are to:
-
1.
Introduce an integrated optimization model based on the STP and address a two-stage network.
-
2.
Consider the total transportation cost, including carbon emissions cost under CTP, total transportation time, and total deterioration rate.
-
3.
Compare different methods to identify which one provides more realistic outcomes.
-
4.
Provide managerial insights following sensitivity analysis and presents a comprehensive discussion along with conclusions.
The novelties of this proposed work are as follows:
-
1.
It considers the effect of changing carbon emissions in transportation under the CTP, which is a significant contribution in today's environmental context.
-
2.
Here, this work introduces type-2 Pythagorean fuzzy logic to manage greater uncertainty and address the complexities of real-life problems.
-
3.
A simple and suitable ranking index is utilized to convert a type-2 Pythagorean fuzzy number into a crisp form.
-
4.
The Pareto-optimal solutions of the proposed problem are determined using Fuzzy Programming (FP), Intuitionistic Fuzzy Programming (IFP), and the Global Criterion Method (GCM), and then the results are compared.
1.3 Motivation and objective
The integration of MOSTP and two-stage networking, particularly in the context of carbon emissions and a mixed uncertainty has garnered significant attention for its wide-ranging applications in green logistic modelling. However, existing studies on integrated transportation systems is demonstrated certain gaps, with numerous theoretical and computational aspects of MOSTP models remaining unexplored. This realization is prompted to design a model under a two-fold uncertainty. The primary objectives of this study are outlined as follows:
1. This research aims to establish a connection between MOSTP and a two-stage network, introducing that is refer to as the Multi-Objective Two-Stage Solid Transportation Problem (MOTSSTP).
2. The study organizes the concept of various transportation modes across the entire supply chain in MOTSSTP. While previous researches are predominantly focused on multi-objective optimization conditions, we specifically consider different conflicting goal functions. Notably, we explore the inclusion of transport time as one of the objectives alongside other goals, a facet often overlooked in existing studies.
3. This research delves into the carbon cap and trade strategy, a policy with the potential to achieve overall emissions reduction at a minimal total cost. Under this program, regions with higher reduction costs can purchase allowances from areas where reductions are more affordable, ultimately lowering the overall compliance cost.
4. This research finding provides a detailed explanation of how the proposed ranking approach effectively handles uncertainty in market supply and demand.
5. The evidence presented demonstrates the approach's ability to convert uncertain information into usable data for optimization, thereby addressing the critical aspect of decision-making under uncertainty.
6. STP is extensively utilized in logistics and supply chain management for cost-saving purposes. Considering that the availability of sources and the demand at destinations are represented by triangular fuzzy numbers, a fuzzy approach have been employed to identify optimal solutions for a multi-objective two-stage fuzzy STP. In this approach, membership functions for the objective functions are defined instead of relying on fixed values, providing DMs with more comprehensive information for informed decision-making.
1.4 Organization of the paper
The remaining part of the article is structured as below: In Sect. 2, the fundamental definitions such as fuzzy set, type-2 fuzzy set, Pythagorean fuzzy set etc. with few primary characteristics are elaborated. Section 3 outlines the assumptions and notations utilized in the mathematical model. In Sect. 4, FP is presented. Two numerical examples are offered in Sect. 5; subsequently in Sect. 6 experimental results with comparative study are discussed. Sensitivity analysis and managerial insights are placed in Sect. 7. Finally, the conclusions and future research opportunities are discussed, along with the advantages and limitations of this study.
2 Basic definition and operation
Definition 1.
Fuzzy set (Zadeh 1965):
Let \(X\) be a universe of discourse. A fuzzy set \({\tilde {A}}\) in \(X\) is characterized by a representative function \(\mu_{\tilde {A} }\)(x): \(X \to \left[ {0,1} \right]\). A fuzzy set \({\tilde {A}}\) in \(X \) can be written as follows:
Here the representative grades of à are crisp numbers. This fuzzy set in \(X\) then the notation
where the term \(\mu_{i} /x_{i} \left( {i = 1, 2, . . . , n} \right)\) reflects the membership grade \(\mu\)i of \(x_{i}\) in \({\tilde {A}}\) and ‘\(+\)’ denotes here the union.
Definition 2.
Type-2 fuzzy set (Mendel and John 2002):
A type-2 fuzzy set \(\mathop A\limits^{ \approx }\), indicated as T2FS, is described by a representative function as expressed underneath:
Here, \(X\) indicates to the initial region, \(U\) indicates the secondary region of the T2FS and \(V\) is taken as the secondary representative of \(x, x \in X\), i.e.,
in which \(0 \le \mu_{\tilde {A}} \left( {x,u} \right) \le 1.\) \(\mathop A\limits^{ \approx }\) may be represented as
where, \(x\) is the initial variable, \(J_{x}\) is its initial representative function, \(J_{x} \subseteq \left[ {0,1} \right]\), \(u\) is the secondary variable and \(\smallint \limits_{{u \in J_{x} }} \mu_{\tilde {A}} \left( {x,u} \right)/u\) is the secondary representative function.\( \smallint \smallint\) denotes union over all admissible \(x\) and \(u\). In case of universe of discrete discourses, \(\smallint\) is replaced by \(\sum\).
Example:
Assume \(\mathop A\limits^{ \approx }\) = \(\left\{ {x,\mu_{{\tilde{A}}} \left( x \right)): \forall x \in X} \right\} , X = \left\{ {10,11,12} \right\}\) and the initial representative of X are respectively
The secondary representative function of \(10\) is
Similarly, get,
and \(\mu_{\mathop A\limits^{ \approx }} \left( {12} \right) = \mu_{\tilde {A}} \left( {12,u} \right) = (0.3/0.8) + (0.4/0.9) + (0.7/0.1)\).
Hence, type-2 discrete fuzzy number \(\mathop A\limits^{ \approx }\) is given by
Definition 3.
Pythagorean fuzzy set (Yager 2013):
A Pythagorean fuzzy set \(\tilde{P}\) over a universal set \(X\) is expressed as a set of ordered triplet, \(\tilde{P} = \left\{ {\left\langle {x,\varphi_{{\widetilde{p }}} \left( x \right),\psi_{{\widetilde{p }}} \left( x \right)} \right\rangle } \right\}\) in which the functions \(\varphi_{{\widetilde{p }}} \left( x \right):X \to \left[ {0,1} \right]\) and \(\psi_{{\widetilde{p }}} \left( x \right):X \to \left[ {0,1} \right]\) represent membership and non-membership degree of \(x \in X\) in the set \(\tilde{P}\), respectively, satisfying the condition \( 0 \le \varphi_{{\widetilde{p }}}^{2} \left( x \right) + \psi_{{\widetilde{p }}}^{2} \left( x \right) \le 1\). Furthermore, the function \(\theta_{{\widetilde{p }}} \left( x \right) = \sqrt {1 - \varphi_{{\widetilde{p }}}^{2} \left( x \right) - \psi_{{\widetilde{p }}}^{2} \left( x \right)}\) is said to be the degree of hesitancy or indeterminacy of \(x \in X\) to the set \(\tilde{P}\).
2.1 Triangular type-1 Pythagorean fuzzy number
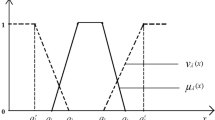
A Pythagorean fuzzy number (PFN) of the form \({\tilde{A }}\) = \(\left( {\underline {\varsigma } ,\varsigma ,\overline{\varsigma }} \right); \mu_{{\tilde{A}}} ,\gamma_{{\tilde{A}}} , \) with the representative and the non-representative dimension of an element x = ς in \({\tilde{A }}\) are respectively written as \(\varepsilon_{{\tilde{\varsigma }}}\) and \(\rho_{{\tilde{\varsigma }}}\), is said to be triangular type-1 PFN if it’s representative and non-representative functions respectively are given below:
Here, \(\in_{{{\tilde{{\varsigma }}}}}\) and \({\uprho }_{{{\tilde{{\varsigma }}}}}\) satisfy the conditions: 0 \(\le \in_{{\tilde{\varsigma }}} \le 1, 0 \le \rho_{{\tilde{\varsigma }}} \le 1, 0 \le \in_{{\hat {\varsigma }}}^{2} + \rho_{{\hat {\varsigma}} }^{2} \le 1\).
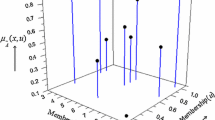
2.2 Proposed triangular type-2 Pythagorean fuzzy number (TT2PFN):
A TT2PFN \(\mathop A\limits^{ \approx }\) on X is given by \(\mathop A\limits^{ \approx }\) =\(\left( {{\tilde{A}}_{1} ,{\tilde{A}}_{2} ,{\tilde{A}}_{3} } \right); \mu_{{\mathop A\limits^{ \approx }{ }}} ,\gamma_{{\mathop A\limits^{ \approx }{ }}} ,\) where\({\tilde{A}}_{1}\), \({\tilde{A}}_{2}\) and \({\tilde{A}}_{3}\) are again triangular type-1 PFNs and \(\mu_{{\mathop A\limits^{ \approx }{ }}} \, {\text{and}} \, \gamma_{{\mathop A\limits^{ \approx }}}\) represents the degree of acceptance and degree of non- acceptance of \(\mathop A\limits^{ \approx }\) respectively. Therefore, it can be written,
where \(\omega_{1} =\) min \(\{ \mu_{{\tilde{a}_{ij} }} ,\mu_{{\tilde{b}_{ij} }} ,\mu_{{\tilde{c}_{ij} }} \} , \omega_{2} =\) max \(\{ \mu_{{\tilde{a}_{ij} }} ,\mu_{{\tilde{b}_{ij} }} ,\mu_{{\tilde{c}_{ij} }} \} ,_{{}}\) denote the degrees of membership and non-membership functions of \(\mathop A\limits^{ \approx },\) respectively. Here, \(\omega_{1}\) and \(\omega_{2}\) satisfy the conditions: 0 \(\le \omega_{1} \le 1, 0 \le \omega_{2} \le 1, 0 \le \omega_{1}^{2} + \omega_{2}^{2} \le 1\).
Arithmetic operations on TT2PFNs
Assume that \(\mathop A\limits^{ \approx }\) and \(\mathop B\limits^{ \approx }\) are two TT2PFNs such that
where \(\theta_{1} =\) min \(\left\{ {\mu_{{a_{11} }} ,\mu_{{b_{11} }} ,\mu_{{c_{11} }} } \right\},\) \(\theta_{2} =\) max \(\left\{ {\gamma_{{a_{11} }} ,\gamma_{{b_{11} }} ,\gamma_{{c_{11} }} } \right\}\)
and \(\theta_{3} =\) min \(\left\{ {\mu_{{a_{22} }} , \mu_{{b_{22} }} , \mu_{{c_{22} }} } \right\},\) \(\theta_{4} =\) max {\(\gamma_{{a_{22} }} , \gamma_{{b_{22} }} , \gamma_{{c_{22} }} \} ,\)
Therefore the addition, subtraction and scalar multiplication of the numbers are stated as below:
where \(\delta_{1} =\) min \(\{ \mu_{{a_{11} }}\)\(\Lambda \mu_{{a_{22} }} , \mu_{{b_{11} }} \Lambda \mu_{{b_{22} }} , \mu_{{c_{11} }} \Lambda \mu_{{c_{22} }} \}\),
\(\delta_{2}\)= max {\(\gamma_{{a_{11} }} \Lambda \gamma_{{a_{22} }} , \gamma_{{b_{11} }} \Lambda \gamma_{{b_{22} }} , \gamma_{{c_{11} }} \Lambda \gamma_{{c_{22} }}.\)
where \( \delta_{3} =\) min \(\{ \mu_{{a_{11} }}\)\(\Lambda \mu_{{c_{22} }} , \mu_{{b_{11} }} \Lambda \mu_{{b_{22} }} , \mu_{{c_{11} }} \Lambda \mu_{{c_{22} }} \}\),
\( \delta_{4} \) = max {\(\gamma_{{a_{11} }} \Lambda \gamma_{{c_{22} }} , \gamma_{{b_{11} }} \Lambda \gamma_{{b_{22} }} , \gamma_{{c_{11} }} \Lambda \gamma_{{a_{22} }}\)}.
2.3 Proposed ranking function
An updated ranking function, \({\Re }\left( {\mathop A\limits^{ \approx }{ }} \right)\), which maps TT2PFNs to real line numbers, is implemented in this study as a ranking function for ordering and comparing TT2PFNs, i.e., \({\Re }:{ }{\mathbb{F}}\left( {\mathop A\limits^{ \approx }{ }} \right) \to {\mathbb{R}}\) where \({\mathbb{F}}\left( {\mathop A\limits^{ \approx }{ }} \right)\) is the collection of all TT2PFNs and \({\mathbb{R}}\) is the set of real numbers, is defined as given below:
Here,
This ranking function satisfies both linearity and additive properties.
Let \(\mathop A\limits^{ \approx }\) and \(\mathop B\limits^{ \approx }\) be two TT2PFNs. Therefore, the next comparison is taken into consideration.
Case (i): ℜ (\(\mathop A\limits^{ \approx }){ } > {\Re }\left( {\mathop B\limits^{ \approx }{ }} \right) \Rightarrow \mathop A\limits^{ \approx }{ } >_{{\Re }} \mathop B\limits^{ \approx }{ }, \) i.e., min {\(\mathop A\limits^{ \approx }\), \(\mathop B\limits^{ \approx }\)} = \(\mathop B\limits^{ \approx }\),
Case (ii): ℜ (\(\mathop A\limits^{ \approx }) < {\Re }\left( {\mathop B\limits^{ \approx }} \right) \Rightarrow \mathop A\limits^{ \approx }{ } <_{{\Re }} \mathop B\limits^{ \approx }{ }, \) i.e., min {\(\mathop A\limits^{ \approx }\), \(\mathop B\limits^{ \approx }\)} = \( \mathop A\limits^{ \approx }\),
Case (iii): ℜ (\(\mathop A\limits^{ \approx }) = {\Re }\left( {\mathop B\limits^{ \approx }} \right) \Rightarrow \mathop A\limits^{ \approx }{ } =_{{\Re }} \mathop B\limits^{ \approx }{ }, \) i.e., min {\(\mathop A\limits^{ \approx }\), \(\mathop B\limits^{ \approx }\)} = \(\mathop A\limits^{ \approx }\) = \(\mathop B\limits^{ \approx }\).
After transforming TT2PFNs into crisp numbers, we take into account this straightforward type linear ranking function technique for comparing TT2PFNs to get around the time-complexity and the difficulty in getting results that are directly applicable to real-world problems caused by the type-2 fuzziness of the numbers.
2.4 Benefit of TT2PFN
TT2PFN represent a sophisticated extension of the Pythagorean fuzzy set framework, offering a nuanced approach to handling uncertainty and ambiguity in decision-making processes. In traditional Pythagorean fuzzy sets, each element is characterized by a membership degree and a non-membership degree, reflecting its degree of belongingness and non-belongingness to a given set. However, TT2PFNs introduce an additional layer of complexity by incorporating the concept of hesitation degrees, which capture the degree of uncertainty or indecisiveness associated with each element. This enhanced representation allows DMs to more accurately model and analyse complex scenarios where uncertainty is prevalent and decision outcomes are influenced by multiple conflicting factors. By considering not only the membership and non-membership degrees but also the hesitation degrees, T2PFNs provide a more comprehensive and nuanced understanding of the underlying uncertainty, enabling better-informed decision-making. To understand this concept, consider the following example:
Example.
Let us consider an example involving a shipping company tasked with delivering goods to different regions throughout the year. The delivery schedule is divided into three time periods: Quarter 1 (Q1) from January to March, Quarter 2 (Q2) from April to June, and Quarter 3 (Q3) from July to September. During Q1, the shipping company plans to transport \(1000\) containers of goods, with a minimum estimate of \(800\) containers and a maximum estimate of \(1200\) containers. However, due to various factors such as weather conditions and logistical challenges, the exact number of containers that will be delivered is uncertain. The acceptance rate for deliveries in Q1 is estimated to be \(70\%\) and the non-acceptance rate is \(10\%\). Moving to Q2, the company aims to transport \(900\) containers, with a minimum estimate of \(700\) containers and a maximum estimate of \(1100\) containers. The acceptance rate for deliveries in Q2 is slightly lower at \(60\%\) and a non-acceptance rate of \(20\%\). In Q3, the company plans to transport \(1200\) containers, with a minimum estimate of \(1000\) containers and a maximum estimate of \(1400\) containers. The acceptance rate for deliveries in Q3 matches that of Q1 at \(70\%\) and the non-acceptance rate remains at \(10\%\). To effectively describe the uncertainty associated with the shipping company's delivery plans, we can employ a TT2PFN denoted as:
This TT2PFN captures the uncertainty surrounding the company's delivery plans, including the varying estimates of container quantities, acceptance rates, non-acceptance rates, and levels of indeterminacy across different quarters.
Theorem 2.1
The ranking function provides a total order relation to a set of TT2PFNs.
Proof.
Assume that \(\mathop A\limits^{ \approx }\) and \(\mathop B\limits^{ \approx }\) are two TT2PFNs. Let us consider a binary relation \(\le_{{\Re }}\) on \( \mathbb{N} \)(\(\mathop A\limits^{ \approx }\)) by \(\mathop A\limits^{ \approx } <_{{\Re }} \mathop B\limits^{ \approx }\) if and only if \(\mathop A\limits^{ \approx } \le_{{\Re }} \mathop B\limits^{ \approx }\) for \(\mathop A\limits^{ \approx }\), \(\mathop B\limits^{ \approx }\) ∈ \( \mathbb{N} \)(\(\mathop A\limits^{ \approx }\)).
To prove that the ranking function provides a total order relation, we need to show that:
Reflexivity: \(\le_{{\Re }}\) is reflexive since \(\mathop A\limits^{ \approx }\) is identical to itself, so ℜ (\(\mathop A\limits^{ \approx }) = {\Re }\left( {\mathop A\limits^{ \approx }} \right)\).
Antisymmetry: Suppose \(\mathop A\limits^{ \approx }\) and \(\mathop B\limits^{ \approx }\) are two TT2PFNs such that \(\mathop A\limits^{ \approx }{ } \le_{{\Re }} \mathop B\limits^{ \approx }\) and \(\mathop B\limits^{ \approx }{ } \le_{{\Re }} \mathop A\limits^{ \approx }\) hold. Therefore ℜ(\(\mathop A\limits^{ \approx }) \le_{{\Re }} {\Re }\left( {\mathop B\limits^{ \approx }} \right)\) and ℜ(\(\mathop B\limits^{ \approx }) \le_{{\Re }} {\Re }\left( {\mathop A\limits^{ \approx }} \right)\). This implies that ℜ(\(\mathop B\limits^{ \approx }) = {\Re }\left( {\mathop A\limits^{ \approx }} \right)\). Consequently, by the previously mentioned cases (i), (ii) and (iii) of the ranking function, we have \(\mathop A\limits^{ \approx } =_{{\Re }} \mathop B\limits^{ \approx }\). Hence, \(\le_{{\Re }}\) is antisymmetric.
Transitivity: Let us assume that \(\mathop A\limits^{ \approx }\), \(\mathop B\limits^{ \approx }\) and \(\mathop C\limits^{ \approx }\) be three TT2PFNs such that \(\mathop B\limits^{ \approx } \le_{{\Re }} \mathop A\limits^{ \approx }\) and \(\mathop A\limits^{ \approx } \le_{{\Re }} {\mathop C\limits^{ \approx }}\) hold. Therefore, ℜ(\(\mathop B\limits^{ \approx }) \le_{{\Re }} {\Re }\left( {\mathop A\limits^{ \approx }} \right)\) and ℜ(\(\mathop A\limits^{ \approx }) \le_{{\Re }} {\Re }\left( {\mathop C\limits^{ \approx }} \right)\). It follows that ℜ(\(\mathop B\limits^{ \approx }) \le_{{\Re }} {\Re }\left( {\mathop C\limits^{ \approx }} \right)\). Hence, by the cases, \(\mathop B\limits^{ \approx } \le_{{\Re }} \mathop C\limits^{ \approx }\). Therefore, \(\le_{{\Re }}\) is transitive.
Finally, the comparability property ensures that any two TT2PFNs can be compared in terms of their ranking. Therefore, the ranking function ℜ(\(\mathop A\limits^{ \approx })\) provides a total order relation on \( \mathbb{N} \)(\(\mathop A\limits^{ \approx }\)).
Theorem 2.2 \({\Re }\left( {k\mathop A\limits^{ \approx }} \right) = k{\Re }\left( {\mathop A\limits^{ \approx }} \right),k \ge 0\)
Proof.
Assume that
\(\theta_{1} =\) min \(\left\{ {\mu_{{a_{11} }} ,\mu_{{b_{11} }} ,\mu_{{c_{11} }} } \right\}\), where \(\theta_{2} =\) max \(\left\{ {\gamma_{{a_{11} }} ,\gamma_{{b_{11} }} ,\gamma_{{c_{11} }} } \right\}\) be a TT2PFN.
Using the algebraic operation of TT2PFN, we have k \(\mathop A\limits^{ \approx } =\) \(\left( {\left( {\mathop {ka}\limits^{\backprime}\nolimits_{11} ,ka_{11} ,k\mathop a\limits^{\prime }\nolimits_{11} } \right);\mu_{{a_{11} }} ,\gamma_{{a_{11} }} ,\mathop {(kb}\limits^{\backprime}\nolimits_{11} ,kb_{11} ,k\mathop b\limits^{\prime }\nolimits_{11} );\mu_{{b_{11} }} ,\gamma_{{b_{11} }} ,\left( {k\mathop c\limits^{\backprime}\nolimits_{11} ,kc_{11} ,k\mathop c\limits^{\prime }\nolimits_{11} } \right);\mu_{{c_{11} }} ,\gamma_{{c_{11} }} } \right);\theta_{1} ,\theta_{2}\) is a TT2PFN.
3 Mathematical formulation
3.1 Assumption and notation
3.1.1 Assumptions
-
1.
The distributed product is homogeneous. The transportation mode is hetero-generous in nature.
-
2.
The quantity of shipped commodities is directly proportional to the logistical cost and carbon emissions.
-
3.
The transportation time is proportional to the distance which is independent of the quantity of exported item.
-
4.
Carbon emissions depend on the distance travelled by vehicles, fuel usage, and the quantity of transported goods.
3.1.2 Notations
Index | Description |
|---|---|
\(i\) | Index of source \(\left( {i = 1,2, \ldots ,m} \right)\) |
\(j\) | Index of destination \(\left( {j = 1,2,...,n} \right)\) |
\(k\) | Index of transportation mode \(\left( {k = 1,2, \ldots ,l} \right)\) |
\(r\) | Index of customer \(\left( {r = 1,2, \ldots ,p} \right)\) |
Variable | Description |
\(x_{ijk} \) | Amount of goods to be transported from ith plants to jth destination by kth vehicle |
\(y_{jrk} \) | Quantity of goods is transported from jth distribution center to rth customers by kth conveyance mode |
Parameter | Description |
\(\mathop{\mathop a\limits^{\approx }}\nolimits_{i} \) | Accessibility of ith source in TT2PFN |
\(\mathop {\mathop b\limits^{\approx }}\nolimits_{j} \) | Demand of jth destination in TT2PFN |
\(\mathop {\mathop e\limits^{ \approx }}\nolimits_{k}\) | Capacity of kth transportation mode in TT2PFN |
\(\mathop {\mathop {b^{\prime}}\limits^{ \approx }}\nolimits_{r} \) | Demand of rth the customer in TT2PFN |
\(c_{ijk} \) | Transportation charge per unit item from ith source to jth distribution center by kth vehicle |
\(c_{jrk} \) | Transportation charge per unit item from jth distribution center to rth customer by kth conveyance |
\(f_{ijk} \) | Fixed charge to distribute products from ith to jth route by kth conveyance |
\(f_{jrk} \) | Fixed charge to distribute products from jth to rth route by kth conveyance |
\(d_{ijk} \) | Deterioration rate of goods from ith source to jth destination by kth conveyance |
\(d_{jrk} \) | Deterioration rate of goods from jth distribution center to rth customers by kth conveyance |
\( d^{\prime}_{ij} \) | Distance from ith source to jth destination |
\(d^{\prime}_{jr} \) | Distance from jth distribution center to rth customers |
\(g_{k} \) | Carbon emissions rate by kth conveyance |
\(\beta\) | Purchasing cost for a unit of carbon emissions permit |
\(\gamma\) | Selling cost of a unit of carbon cap |
\(p_{c} \) | Penalty cost per unit emitted in excess of the cap |
\(C\) | Emissions cap (the government sets the limit or cap on emissions permitted across a given industry) |
\(h_{i} \) | Holding cost per unit of goods for ith source |
\(h_{j} \) | Holding cost per unit of goods for jth distribution center |
\(t_{ijk} \) | Time of transportation of the product from ith plant to jth destination by kth conveyance |
\(t_{jrk} \) | Time of transportation of the product from jth distribution center to rth customers by kth conveyance |
\(l_{i} \) | Loading time for a unit item at ith source |
\(l^{\prime}_{j} \) | Unloading time for a unit quantity at jth distributions |
\(l_{j} \) | Loading time for a unit item at jth distribution center |
\(l^{\prime}_{r} \) | Unloading time for a unit item at rth customer |
3.2 Mathematical model
This section describes the proposed mathematical model step by step.
Model 1
where \(\left( {C - \left( {\mathop \sum \limits_{i = 1}^{m} \mathop \sum \limits_{j = 1}^{n} \mathop \sum \limits_{k = 1}^{l} g_{k} d^{\prime}_{ij} x_{ijk} + \mathop \sum \limits_{j = 1}^{n} \mathop \sum \limits_{r = 1}^{p} \mathop \sum \limits_{k = 1}^{l} g_{k} d^{\prime}_{jr} y_{jrk} } \right)} \right)^{ + }\)
Elementary information about the model:
The objective function (1) minimizes the total transportation cost and carbon emissions cost. The objective function (2) is associated escorted by customer accomplishment, which expects to cut down the total shipping time, loading time and unloading time. The objective function (3) indicates minimization of total deterioration rate. The entire availability at plants and constraints are represented by constraint (4). Constraint (5) represents demand constraints of distribution centers in the first phase. The capacity of the conveyance at first stage is described in constraint (6). The requirements and demand limits of distribution centers and clients in the second stage are mentioned in constraints (7) and (8). The conveyance capacity in second stage is described by constraint (9). The system's flow conversation is constrained by constraint (10). The feasibility criterion is governed by constraints (11)–(14). Constraints (15) indicate the non-negativity conditions. Constraints (16) and (17) are binary conditions.
The objective function (1) demonstrates with the carbon constraint, that there are two workable zones. The first zone occurs when total carbon emissions exceed the carbon cap. The second zone arises when total carbon emissions are below the carbon cap.
The model (Model 1.1) is developed for Case 1 as follows.
Case 1:
Model 1.1
Minimize \(Z_{2} \left( {x,y} \right)\) (Eq. 2)
Minimize \(Z_{3} \left( {x,y} \right)\) (Eq. 3)
Subject to the constraints (4)–(17)
The formulation of the model (Model 1.2) for Case 2 is described as follows:
Case 2:
Model 1.2
Minimize \(Z_{2} \left( {x,y} \right)\) (Eq. 2)
Minimize \(Z_{3} \left( {x,y} \right)\) (Eq. 3)
Subject to the constraints (4)–(17)
3.3 Deterministic model
Type-2 Pythagorean fuzzy MOTSSTP model can’t be handled straightforwardly because of presence of TTPFN. To address this complexity, the researchers introduced a concept called defuzzification ranking index into the model.
Model 2:
Minimize \(Z_{1} \left( {x,y} \right)\) (Eq. 1)
Minimize \(Z_{2} \left( {x,y} \right)\) (Eq. 2)
Minimize \(Z_{3} \left( {x,y} \right)\) (Eq. 3)
Subject to the constraints (10) and (15)–(17),
Equivalent crisp model corresponding to Model 1.1
Model 2.1:
Minimize \(Z_{1} \left( {x,y} \right)\) (Eq. 18)
Minimize \(Z_{2} \left( {x,y} \right)\) (Eq. 2)
Minimize \(Z_{3} \left( {x,y} \right)\) (Eq. 3)
Subject to the constraints (10), (15)–(17), and (20)–(29),
Equivalent crisp model corresponding to Model 1.2
Model 2.2:
Minimize \(Z_{1} \left( {x,y} \right)\) (Eq. 19)
Minimize \(Z_{2} \left( {x,y} \right)\) (Eq. 2)
Minimize \(Z_{3} \left( {x,y} \right)\) (Eq. 3)
Subject to the constraints ((10), (15)–(17), and (20)–(29)),
4 Solution procedure
In the proposed multi-objective optimization problem, each objective conflict with another, and in certain cases, there may not exist a methodology for an optimal arrangement that satisfies all objective functions simultaneously. The best solution for one objective may be the worst for another. Between feasible and non-feasible solutions, the Pareto-optimal solution lies on the boundary, attainable through multi-objective optimization methods. Various fuzzy and non-fuzzy approaches for obtaining the Pareto-optimal solution in multi-objective decision-making have been identified from the literature. Common methodologies include fuzzy programming, intuitionistic fuzzy programming, neutrosophic linear programming, etc. In this study, FP is chosen for solving the model. The outlined models are individually resolved using the FP method. Subsequently, the most favourable model is selected for a superior approach that provides the final Pareto-optimal solution. Zimmermann (1978) introduced FP to address any multi-objective linear programming problem, establishing it as a fundamental fuzzy technique that yields anticipated outcomes in a straightforward manner. To trace the optimal Pareto-optimal solution, leveraging the capabilities of FP, the solution for MOSTSTP is addressed and proposed. The anticipated steps are described below:
Step 1: Convert the fuzzy framework into a deterministic model and restructure several crisp models corresponding to carbon discharge policy. Address MOTSSTP as a single objective, considering only one objective function \(Z_{s} \, \left( {s = 1, 2, 3} \right)\) at a time and disregarding the others. The optimal outcomes for the \(s{\text{th}}\) \(\left( {s = 1, 2, 3} \right)\) objective function denoted as \(\left( {x^{s*} , y^{s*} } \right)\), are identified in this process.
Step 2: Based on the results obtained from Step 1, assess the corresponding outcomes of each objective function front.
Step 3: Determine the lower \(\left( {L_{s} } \right)\) and upper bounds \(\left( {U_{s} } \right)\) for the \(s{\text{th}}\) \(\left( {s = 1, 2, 3} \right)\) objective function, which are conflicting in nature. Therefore, \(U_{s} = L_{s}\) is not possible for any \(\left( {x^{s*} , y^{s*} } \right),\left( {s = 1, 2, 3} \right).\) \(U_{s} \,\,{\text{ and}}\, L_{s}\) are determined in the following way:
Additionally, the corresponding pay-off matrix is defined in Table 3.
Step 4: Formulate the representative function \(Z_{s} \left( {x,y} \right)\) by setting their tolerance. It is defined as follows:
Step 5: Optimize the degree of acceptance for each objective function, fixing the degree of acceptance as λ. Subsequently, Model 2 is formulated with the assistance of FP, as described below:
Model 3 (Model 2.1):
Maximize λ
Subject to \(\mu_{s} \left( {Z_{s} \left( {x,y} \right)} \right) \ge \lambda , \left( {s = 1, 2, 3} \right)\);
the constraints (10) and (15)–(17);
\(\lambda \in \left[ {0, 1} \right]\).
Model 4 (Model 2.2):
Maximize λ
Subject to \(\mu_{s} \left( {Z_{s} \left( {x,y} \right)} \right) \ge \lambda , \left( {s = 1, 2, 3} \right);\)
the constraints (10) and (15)–(17);
the constraints (20)–(29) and (31);
Step 6: Solve Model 3 (Model 4) with the help of the LINGO repetitive method by tracing extreme value of parameter λ and acquire the Pareto-optimal outcomes of Model 2.1 (Model 2.2).
Theorem:
If \(\left( {x^{*} , y^{*} } \right) = \left( {x_{ijk}^{*} ,y_{jrk}^{*} , i = 1, 2, \ldots , m; j = 1, 2, ..., n; r = 1,2, \ldots ,p; k = 1, 2, \ldots ,l} \right)\) is a possible outcome of Model 3 (Model 4), thereafter it is also Pareto-optimal solution of Model 2.1 (Model 2.2).
Proof.
Using the solution procedure in the reverse way and take \((x^{*} ,y^{*} )\) is a Pareto-optimal solution of Model 2.1 (Model 2.2). Therefore, from it can be considered that there exists at least one \(x\) such
Since, the representative function \(\mu_{s} \left( {Z_{s} \left( {x,y} \right)} \right)\) strictly decreases with respect to the objective function in [0,1].
So,
Now,
This contradicts that \((x^{*} ,y^{*} )\) is a solution of Model 3 (Model 4). Where \(\lambda^{\prime}\) indicates the functional value of \(\lambda\) at \((x^{*} ,y^{*} )\). Hence the theorem is proved.
5 Application example based on real-life data
Example 1:
In this section, a comprehensive mathematical analysis is undertaken using a standard example to validate the objectives of this article. The problem at hand involves a two-stage transportation scenario categorized into two steps. In the first step, goods are transported from sources to distributors, and in the second step, goods are shipped from distributors to customers at the demand points. Consider a hypothetical manufacturing company in India that produces high-speed diesel products. The company is equipped with four \(\left( {m = 4} \right)\) plants named as \(S_{1} , S_{2} , S_{3}\) and \(S_{4}\) and two \(\left( {n = 2} \right)\) distribution centers labelled as \(D_{1} , D_{2}\) and three \(\left( {p = 3} \right)\) demand points (customers) \(C_{1} , C_{2}\) and \(C_{3}\), respectively. The industry deports high-speed diesel from sources to customers via tankers, utilizing two types of conveyance \(\left( {k = 2} \right),\) namely railways and highways. The other inputs are as follows carbon emissions cap \(C = 100,000\) g; carbon treading (buying cost) (INR/g) β \(= 0.4\) INR; carbon treading(selling cost) (INR/g) γ \(= 0.6\); Holding cost (INR/g) for first stage \(h_{1} = 600\), \(h_{2} = 900\), \(h_{3} = 1000\), \(h_{4} = 1100\); Holding cost (INR/g) for second stage \(h_{1}^{\prime } = 700\), \(h_{2}^{\prime } = 800;\) carbon emissions rate (g/L) for first stage \(g_{1} = 0.70\), \(g_{2} = 0.63\); carbon emissions rate (g/L) for second stage \(g_{1} = 0.61\), \(g_{2} = 0.60\). All the pertinent information related to this context is systematically organized and presented in Tables 4, 5, 6, 7, 8, 9 and 10.
Example 2:
Here the carbon emissions limit is considered \(C=\text{40,000}\) g and other parameters are identical as in Example 1.
6 Experimental result and discussion
The initial step in the process involves identifying the best possible outcomes and perfect outcomes (individual minimum). Here, the outcomes of Model 2.1 and Model 2.2 are determined to ensure feasible solutions that lead to the possible outcomes of these models. Subsequently, it is strived to find a better solution for Model 2. If one of Model 2.1 or 2.2 has a feasible solution while the other does not, then the ideal solution for the corresponding model is considered the ideal outcome for Model 2. On the other hand, if both Model 2.1 and Model 2.2 have feasible solutions, the minimum value is taken as the optimal solution. Using these better possible outcomes, objective functions are minimized, and the expected outcomes are presented in Tables 11 and 12. Iterative formulas are employed to achieve this objective. As a result, the maximum and minimum through corresponding supremum and infimum of membership and non-membership functions and the anti-ideal solution are identified and calculated. After a numerical experiment, it is evident that the overall transportation charge, time, and cost of carbon discharge are minimized. In the end, the LINGO 20.0 software is employed to solve the simplified optimization model and obtain the compromise solution of MOTSSTP, as outlined in Tables 13 and 14.
It's noteworthy that the profit of the firms is inversely related to the carbon discharge amount. As the value of carbon emissions cost increases, the profit of the firms decreases, and vice versa. Consequently, industrial organizations are consistently concerned about carbon discharge when transporting products. This consideration is crucial for minimizing environmental impact, controlling pollution, and ensuring a safe surrounding. The examination underscores the significance of imposing additional restrictions on carbon limits in this formulated problem to create a safer environment and achieve maximum benefits in the transportation system by minimizing the total transportation cost.
Therefore, the upper and lower values depend on FP. These are described below:
Therefore, the upper and lower values depend on FP. These are described below:
6.1 Comparative study
In this section, the objective is to tackle the previously mentioned examples using established and relevant solution methods: IFP and GCM. The outcomes derived from these solution methods are subsequently evaluated, enabling the DM to make an informed decision by choosing the most favorable Pareto-optimal solutions. The comparative analysis assists in ascertaining the most appropriate approach, considering the specific requirements and objectives of the decision-making process.
Intuitionistic fuzzy programming (IFP)
By applying the IFP (Das et al. 2022), the streamlined Model 2.1 and Model 2.2 can be represented in the following manner.
Model 5 (Model 2.1)
Minimize \((\lambda_{ } - \eta_{ } )\).
Subject to the constraints (10), (15)–(17), (20)–(29) and (30);
Model 6 (Model 2.2)
Minimize \((\lambda_{ } - \eta_{ } )\).
Subject to the constraints (10), (15)–(17), (20)–(29) and (31);
Here, λ and η are the satisfaction level and dissatisfaction level of the objective function, respectively.
Global criterion method (GCM)
Here a non-fuzzy approach, namely, GCM (Das et al. 2019; Ghosh et al. 2022a) is introduced that provides the compromise solution therefore to find an overall compromise solution; GCM of Model 2.1 (Model 2.2) can be depicted in the following way:
Model 7 (Model 2.1)
minimize \(\left[ {\mathop \sum \limits_{s = 1}^{3} \left( {\frac{{Z_{s} \left( {x,y} \right) - L_{s} }}{{U_{s} - L_{s} }}} \right)^{2} } \right]^{\frac{1}{2}}\).
subject to the constraints (10) and (15)–(17);
Model 7 (Model 2.2)
minimize \(\left[ {\mathop \sum \limits_{s = 1}^{3} \left( {\frac{{Z_{s} \left( {x,y} \right) - L_{s} }}{{U_{s} - L_{s} }}} \right)^{2} } \right]^{\frac{1}{2}}\).
subject to the constraints (10) and (15)–(17);
the constraints (20)–(29) and (31).
Tables 15 and 16 show the results of this comparative study, providing the data and information necessary to evaluate the efficiency of various solution methods in achieving the desired objectives. This data enables the DM to make informed decisions and choose the solution approach that best aligns with the desired outcomes and constraints.
The comparison tables show that GCM provides superior solutions in terms of total transportation cost and time. Conversely, FP and IFP provide better results regarding the deterioration rate, as illustrated in Figs. 3 and 4. Since all outcomes are non-dominated solutions, they are valuable. Therefore, the DM can choose any of the mentioned methods according to their preferences. This comparison ensures that the outcomes from the stated approach are also preferable in terms of sustained accuracy.

Optimum values of \(Z_{1}\), \(Z_{2}\) and \(Z_{3}\) by three procedures for Example 1

Optimum values of \(Z_{1} , Z_{2}\) and \(Z_{3}\) by three procedures for Example 2
7 Sensitivity analysis
In this section, the aim is to investigate how the objective functions respond to potential changes in supply and demand levels. To achieve this, a sensitivity analysis has been carried out. This analysis involves assessing the impact of fluctuations in supply and demand over various change intervals, including decreases and increases of 5%. The sensitivity analysis is conducted by solving Example 2, and the analysis for Example 1 can be done in a similar way.
7.1 Sensitivity analysis on supply
Figure 5 shows that when \({a}_{1}\) is reduced by \(5\%\), the total transportation cost initially increases and then decreases within the range of \(- 5\%\) to \(- 10\%\).

Total cost vs. supply
Conversely, a \(5\%\) and \(10\%\) increase in \(a_{1}\) results in a proportional decrease in total transportation cost. For the supply amount \(a_{2}\) the total transportation cost remains constant throughout. Regarding \(a_{3}\), decreasing the amount increases the total cost, while increasing the amount reduces the total transpotation cost. When the supply amount \(a_{4}\) decreases, the total cost also decreases. Conversely, a \(5\%\) increase in supply reduces the total transportation cost, while a \(10\%\) increase results in an increase in total transportation cost.
Observations from Fig. 6 show that when \(a_{1}\) is decreased by \(5\%\), transportation time initially decreases, but then increases within the range of \(- \;5\) to \(- 10\%\). Conversely, a \(5\%\) and \(10\%\) increase in \(a_{1}\) results in a proportional increase in total transportation time. For the supply amount \(a_{2}\), transportation time remains constant throughout the transportation process. Regarding \(a_{3}\) and \(a_{4}\), when the amount is decreased by \(5\%\), transportation time initially increases but then decreases for \(a_{3}\) and increases for \(a_{4}\), respectively within the range of \(- \;5\) to \(- 10\%\). Conversely, a \(5\%\) increase in supply increases total transportation time, while a \(10\%\) increase in supply results in a decrease in total transportation time.

Total time vs. supply
Figure 7 illustrates that a \(5\%\) decreases in the supply variable \(a_{1}\) results in a decrease in deterioration rates, while a \(10\%\) decrease leads to an increase in deterioration rate. Conversely, when variables \(a_{1}\) are increased by \(5\%\), the deterioration rate decreases, but a \(10\%\) increase results in an increase in the deterioration rate. For variable \(a_{2}\), the deterioration rate remains constant throughout the transportation process. Furthermore, when the supply amounts \(a_{3}\) decreases, the deterioration rate rises accordingly and decreases as the supply increases. Similarly, for variable \(a_{4}\), and the deterioration rate increases as the supply decreases. However, with a \(5\%\) increases in supply the deterioration rate initially decreases with a \(5\%\) increases in supply, but then increases afterwards.

Deterioration rate vs. supply
7.2 Sensitivity analysis on demand
Figure 8 demonstrates that when demand parameters \({b}_{1}\) and \({b}_{2}\) decrease, total transportation cost decreases. Conversely, when the demand increases, the total cost increases.

Total cost vs. demand
Figure 9 shows that a decrease in both demand parameters \({b}_{1}\) and \({b}_{2}\) lead to a reduction in total transportation time, while an increase in demand results in an increase in the total time.

Total time vs. demand
Figure 10 illustrates that when demand parameters \({b}_{1}\) and \({b}_{2}\) decrease, the deterioration rate decreases as well. Conversely, the deterioration rate increases when the demand increases.

Deterioration rate vs. demand
7.3 Managerial implications
This research provides valuable and crucial managerial information that holds significance for both governmental and private entities involved in logistics systems. This study outlines key managerial insights derived from the results, which can improve operational efficiency and overall effectiveness of the current supply chain network.
-
1.
Implementing a multi-objective approach signifies a commitment to sustainability. This study develops strategies that not only optimize transportation efficiency but also minimize carbon emissions.
-
2.
An analysis of the carbon cap-and-trade policy on emissions allows management to determine which scenario results in the lowest carbon emissions. Consequently, they can strike a balance between profitability and environmental sustainability, potentially enhancing their reputation in the global market.
-
3.
Green solid transportation optimization involves coordination with suppliers, carriers, and other stakeholders in the supply chain. Managers can consider how changes in transportation cost, time, etc., will impact the overall supply chain network and develop strategies to optimize the entire system.
-
4.
Logistics managers can benefit from applying this model in situations where variables such as demand and supply fluctuate over time.
-
5.
The Pareto-optimal solution received suggests that the proposed model is a valuable choice for designing networks with multiple orientations and varying components.
8 Conclusion
The transportation process is not a one-dimensional matter though it can be accomplished in multiple successions but here by taking two successions solid transportation problem has been designed to transport the goods from production plants to distributor centers, and then distributor centers to purchasers. Two types of charges, namely variable charge, fixed charges have been taken for transportation decisions. In this study, the multi-objective optimization model has been explored which is useful to elect the effectible conveyance mode similar to necessary three parameters of sustainability: financial, climatic and communally. The optimization framework has been manifested to minimize the overall transportation cost, time and deterioration rate under carbon cap and trade policy. A measurement of the uncertainty by a new form of Pythagorean fuzzy has been done that assists DM to handle real-life behaviors more precisely by observing all characteristics of a decision. The stated problem is an MOTSSTP with uncertain parameters. To tackle the model a ranking approach has been introduced to transform the parameters into their corresponding deterministic forms. Thus, this model is solved by three multi objective optimization techniques namely FP, IFP and GCM. Two numerical examples of the MOTSTTP have been included to highlight the viability and helpfulness of this proposed study.
Research advantage, limitation and future scope
This study offers several advantages, including:
-
(a)
Environmental Sustainability: By focusing on green solid transportation and incorporating carbon cap and trade mechanisms, the study contributes to environmental sustainability efforts. It addresses the urgent need to reduce carbon emissions associated with transportation, aligning with global initiatives to combat climate change.
-
(b)
Efficiency Improvement: The multi-objective two-stage approach proposed in the study aims to optimize transportation processes. By considering multiple objectives simultaneously, such as cost reduction, carbon emissions minimization, deterioration rate reduction and transportation time optimization, the approach can lead to improved efficiency in transportation operations.
-
(c)
Incorporation of Fuzzy Logic: The study utilizes a type-2 Pythagorean fuzzy context, which allows for more nuanced and flexible modeling compared to traditional crisp set approaches. This incorporation of fuzzy logic enables the consideration of uncertainty and vagueness inherent in real-world transportation systems, leading to more realistic and robust optimization results.
-
(d)
Practical Implications: The proposed approach has practical implications for DMs and stakeholders involved in transportation planning and management. By providing a framework for optimizing green transportation while considering carbon cap and trade policy, the study offers valuable insights that can inform policy decisions and operational strategies in the transportation sector.
Overall, the study contributes to the advancement of sustainable transportation practices by offering a sophisticated optimization approach tailored to address the complexities of green solid transportation in a carbon-constrained environment.
The limitation of the study is the complexity introduced by the type-2 Pythagorean fuzzy context. This complexity may pose challenges in interpreting and applying the findings in practical transportation management settings, particularly for stakeholders lacking familiarity or expertise in fuzzy logic or type-2 fuzzy sets. Additionally, the computational requirements involved in solving multi-objective two-stage optimization problems within a fuzzy context could be substantial, potentially limiting the scalability and applicability of the proposed approach to larger transportation systems. Furthermore, the assumptions and simplifications made during the modelling process might not fully encompass the real-world complexities of green solid transportation, thereby affecting the accuracy and reliability of the optimization outcomes. The study may focus on specific scenarios or contexts related to green solid transportation with a carbon cap and trade, which may not be directly applicable to other transportation systems or industries. Additionally, the effectiveness of the proposed approach in addressing environmental concerns and optimizing transportation operations may depend on various factors, such as the availability of data, the implementation of carbon cap and trade policy, and the specific characteristics of the transportation network considered. Therefore, the results and conclusions of the study may not be universally applicable and may require further validation or adaptation for different contexts.
It needs to be emphasized that, besides what has been discussed in this study, other important professions are not mentioned because they are not part of this work’s initial goals. However, in the future, researchers can analyze the MOTSSTP with fully T2PFNs as boundaries and focus on how different arrangements affect it. It is also interesting to explore the use of fuzzy multi-criteria decision-making methods in future works. It is crucial to consider real-world problems in this context, understanding that not all situations can use the calculations presented here. For such cases, it should be the aim to explore the use of meta-heuristic algorithms in future research. These algorithms, inspired by nature, such as genetic algorithms and ant colony optimization, are well-suited to solving these issues and will be important for future research endeavors.
For the upcoming time, the current issue can be applied to multi-item MOTSSTP. Therefore, a key recommendation for future research is to examine the uncertainty of the parameters in the problem by employing robust optimization (Özmen et al. 2017), a fuzzy-target environment, and a fuzzy regression approach (Kropat and Weber 2018), multivariate adaptive regression splines (Weber et al. 2012), and the self-adaptive artificial fish swarm algorithm (Tirkolaee et al. 2020). Additionally, methods such as the lexicographic weighted Tchebycheff method for solving multi-objective mathematical models (Khalilpourazari et al. 2020), stochastic differential games (Savku and Weber 2022), etc., can also be applied. This research can be expanded by incorporating optimal pricing and ordering policies for items that deteriorate over time (Ghoreishi et al. 2014), as well as utilizing time series data (Weber et al. 2011).
Data availability
Research Integrity: We have provided truthful and complete information about the methods, data, and results. The manuscript represents the authors’ original work and has neither been previously published nor concurrently submitted elsewhere. Plagiarism: The content of this manuscript is original, and we have appropriately cited and referenced the work of others. Data Transparency: We commit to making the data associated with this research available to other researchers upon request.
References
Agnihotri S, Dhodiya JM (2023) Non-dominated sorting genetic algorithm III with stochastic matrix-based population to solve multi-objective solid transportation problem. Soft Comput 27(9):5641–5662
AnithaKumari T, Venkateswarlu B, Akilbasha A (2021) Optimizing a fully rough interval integer solid transportation problems. J Intell Fuzzy Syst 41(1):2429–2439
Astanti RD, Daryanto Y, Dewa PK (2022) Low-carbon supply chain model under a vendor-managed inventory partnership and carbon cap-and-trade policy. J Open Innov Technol Market Complex 8(1):30
Balinski ML (1961) Fixed-cost transportation problems. Naval Res Logist Q 8(1):41–54
Bera RK, Mondal SK (2020) Credit linked two-stage multi-objective transportation problem in rough and bi-rough environments. Soft Comput 24(23):18129–18154
Bit AK, Biswal MP, Alam SS (1993) Fuzzy programming approach to multiobjective solid transportation problem. Fuzzy Sets Syst 57(2):183–194
Bouchery Y, Ghaffari A, Jemai Z, Fransoo J (2016) Sustainable transportation and order quantity: insights from multiobjective optimization. Flex Serv Manuf J 28:367–396
Chai Q, Xiao Z, Lai KH, Zhou G (2018) Can carbon cap and trade mechanism be beneficial for remanufacturing? Int J Prod Econ 203:311–321
Charnes A, Cooper WW (1954) The stepping stone method of explaining linear programming calculations in transportation problems. Manage Sci 1(1):49–69
Chen L, Peng J, Zhang B (2017) Uncertain goal programming models for bicriteria solid transportation problem. Appl Soft Comput 51:49–59
Dantzig G (1963) Linear programming and extensions. Princeton University Press, Princeton
Das A, Bera UK, Maiti M (2016) A breakable multi-item multi stage solid transportation problem under budget with Gaussian type-2 fuzzy parameters. Appl Intell 45:923–951
Das SK, Roy SK (2019) Effect of variable carbon emission in a multi-objective transportation-p-facility location problem under neutrosophic environment. Comput Ind Eng 132:311–324
Das A, Bera UK, Maiti M (2019) A solid transportation problem in uncertain environment involving type-2 fuzzy variable. Neural Comput Appl 31:4903–4927
Das SK, Roy SK, Weber GW (2020) Application of type-2 fuzzy logic to a multi objective green solid transportation-location problem with well time under carbon tax, cap, and offset policy: Fuzzy versus nonfuzzy techniques. IEEE Trans Fuzzy Syst 28(11):2711–2725
Das SK, Roy SK, Weber GW (2022) The impact of carbon tax policy in a multi-objective green solid logistics modelling under sustainable development. In: Computational modelling in industry 4.0: a sustainable resource management perspective, pp 49−66. Springer Nature, Singapore
Das SK, Pervin M, Roy SK, Weber GW (2023) Multi-objective solid transportation-location problem with variable carbon emission in inventory management: a hybrid approach. Ann Oper Res 324:283–309
Ding J, Jin F, Li Y, Wang JE (2013) Analysis of transportation carbon emissions and its potential for reduction in China. Chin J Popul Resourc Env 11(1):17–25
Ebrahimnejad A (2014) A simplified new approach for solving fuzzy transportation problems with generalized trapezoidal fuzzy numbers. Appl Soft Comput 19:171–176
Elhedhli S, Merrick R (2012) Green supply chain network design to reduce carbon emissions. Transp Res Part D: Transp Environ 17(5):370–379
Ghoreishi M, Mirzazadeh A, Weber GW (2014) Optimal pricing and ordering policy for non-instantaneous deteriorating items under inflation and customer returns. Optimization 63(12):1785–1804
Ghosh S, Roy SK, Verdegay JL (2022a) Fixed-charge solid transportation problem with budget constraints based on carbon emission in neutrosophic environment. Soft Comput 26(21):11611–11625
Ghosh S, Roy SK, Fügenschuh A (2022b) The multi-objective solid transportation problem with preservation technology using Pythagorean fuzzy sets. Int J Fuzzy Syst 24(6):2687–2704
Ghosh S, Küfer KH, Roy SK, Weber GW (2022c) Carbon mechanism on sustainable multi-objective solid transportation problem for waste management in Pythagorean hesitant fuzzy environment. Complex Intell Syst 8(5):4115–4143
Ghosh S, Roy SK, Weber GW (2023a) Interactive strategy of carbon cap-and-trade policy on sustainable multi-objective solid transportation problem with twofold uncertain waste management. Ann Oper Res 326:1–41
Ghosh S, Küfer KH, Roy SK, Weber GW (2023b) Type-2 zigzag uncertain multi-objective fixed-charge solid transportation problem: time window vs preservation technology. Central Eur J Oper Res 31(1):337–362
Haley KB (1962) New methods in mathematical programming—the solid transportation problem. Oper Res 10(4):448–463
Hashmi N, Jalil SA, Javaid S (2019) A model for two-stage fixed charge transportation problem with multiple objectives and fuzzy linguistic preferences. Soft Comput 23:12401–12415
Hitchcock FL (1941) The distribution of a product from several sources to numerous localities. J Math Phys 20(1–4):224–230
Karthick B, Uthayakumar R (2022) A closed-loop supply chain model with carbon emission and pricing decisions under an intuitionistic fuzzy environment. Env Dev Sustain 2022:1–49
Kantorovich LV (1960) Mathematical methods of organizing and planning production. Manage Sci 6(4):366–422
Khalilpourazari S, Soltanzadeh S, Weber GW, Roy SK (2020) Designing an efficient blood supply chain network in crisis: neural learning, optimization and case study. Ann Oper Res 289:123–152
Kropat E, Weber GW (2018) Fuzzy target-environment networks and fuzzy-regression approaches. Numer Algebra Control Optimiz 8(2):135–155
Maity S, Roy SK (2019) A new approach for solving type-2-fuzzy transportation problem. Int J Math Eng Manage Sci 4(3):683
Mendel JM, John RB (2002) Type-2 fuzzy sets made simple. IEEE Trans Fuzzy Syst 10(2):117–127
Midya S, Roy SK, Yu VF (2021) Intuitionistic fuzzy multi-stage multi-objective fixed-charge solid transportation problem in a green supply chain. Int J Mach Learn Cybern 12:699–717
Mirzaee H, Samarghandi H, Willoughby K (2023) A robust optimization model for green supplier selection and order allocation in a closed-loop supply chain considering cap-and-trade mechanism. Expert Syst Appl 228:120423
Mondal A, Roy SK (2022) Application of Choquet integral in interval type-2 Pythagorean fuzzy sustainable supply chain management under risk. Int J Intell Syst 37(1):217–263
Mondal A, Roy SK, Midya S (2023) Intuitionistic fuzzy sustainable multi-objective multi-item multi-choice step fixed-charge solid transportation problem. J Ambient Intell Humaniz Comput 14(6):6975–6999
Ojha A, Das B, Mondal S, Maiti M (2010) A solid transportation problem for an item with fixed charge, vechicle cost and price discounted varying charge using genetic algorithm. Appl Soft Comput 10(1):100–110
Özmen A, Kropat E, Weber GW (2017) Robust optimization in spline regression models for multi-model regulatory networks under polyhedral uncertainty. Optimization 66(12):2135–2155
Raj KAAD, Rajendran C (2012) A genetic algorithm for solving the fixed-charge transportation model: two-stage problem. Comput Oper Res 39(9):2016–2032
Roy SK, Maity G, Weber GW (2017) Multi-objective two-stage grey transportation problem using utility function with goals. CEJOR 25:417–439
Ren W, Yan Y, Hu Y, Guan Y (2022) Joint optimisation for dynamic flexible job-shop scheduling problem with transportation time and resource constraints. Int J Prod Res 60(18):5675–5696
Roy SK, Midya S, Weber GW (2019) Multi-objective multi-item fixed-charge solid transportation problem under twofold uncertainty. Neural Comput Appl 31(12):8593–8613
Savku E, Weber GW (2022) Stochastic differential games for optimal investment problems in a Markov regime-switching jump-diffusion market. Ann Oper Res 312(2):1171–1196
Sengupta D, Das A, Bera UK (2018) A gamma type-2 defuzzification method for solving a solid transportation problem considering carbon emission. Appl Intell 48(11):3995–4022
Shell E (1955) Distribution of a product by several properties, Directorate of management analysis. In: Proceedings of the second symposium in linear programming, vol 2, pp 615−642
Song J, Leng M (2012) Analysis of the single-period problem under carbon emissions policies. Handbook of newsvendor problems. Springer, New York, pp 297–313
Tirkolaee EB, Goli A, Weber GW (2020) Fuzzy mathematical programming and self-adaptive artificial fish swarm algorithm for just-in-time energy-aware flow shop scheduling problem with outsourcing option. IEEE Trans Fuzzy Syst 28(11):2772–2783
Turken N, Carrillo J, Verter V (2017) Facility location and capacity acquisition under carbon tax and emissions limits: to centralize or to decentralize? Int J Prod Econ 187:126–141
Weber GW, Defterli O, Gök SZA, Kropat E (2011) Modeling, inference and optimization of regulatory networks based on time series data. Eur J Oper Res 211(1):1–14
Weber GW, Batmaz I, Köksal G, Taylan P, Yerlikaya-Özkurt F (2012) CMARS: a new contribution to nonparametric regression with multivariate adaptive regression splines supported by continuous optimization. Inverse Problem Sci Eng 20(3):371–400
Wu P, Jin Y, Shi Y, Shyu H (2017) The impact of carbon emission costs on manufacturers’ production and location decision. Int J Prod Econ 193:193–206
Yager RR (2013) Pythagorean membership grades in multicriteria decision making. IEEE Trans Fuzzy Syst 22(4):958–965
Yang L, Liu L (2007) Fuzzy fixed charge solid transportation problem and algorithm. Appl Soft Comput 7(3):879–889
Zadeh LA (1965) Fuzzy sets. Inf Control 8(3):338–353
Zimmermann HJ (1978) Fuzzy programming and linear programming with several objective functions. Fuzzy Sets Syst 1(1):45–55
Acknowledgements
We would like to extend our heartfelt gratitude to our Honorable Director, Prof. Dr. Pradip Ghosh, for his invaluable support and guidance throughout the course of our M.Sc. project in Mathematics at Midnapore City College. This research work stands as a testament to his unwavering commitment to our academic development. Finally, we are cordially thankful to respected Professor Raffaele Cerulli, Editor-in-Chief, the Associate Editor of the manuscript and all the respected anonymous reviewers for their constructive comments which led to strong improvement in the quality of the manuscript to meet the high standards of Soft Computing.
Funding
This research was supported by the National Science and Technology Council of the Republic of China (Taiwan) under grant numbers NSTC 111-2410-H-011-020-MY3 (V.F. Yu) and NSTC 112-2811-H-011-002 (S.K. Das).
Author information
Authors and Affiliations
Contributions
All authors listed have made significant contributions to the research and preparation of the manuscript. Each author has reviewed and approved the final version of the manuscript and agrees to its submission for publication.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yu, V.F., Bera, A., Das, S.K. et al. Optimizing green solid transportation with carbon cap and trade: a multi-objective two-stage approach in a type-2 Pythagorean fuzzy context. Soft Comput (2024). https://doi.org/10.1007/s00500-024-09864-z
Accepted:
Published:
DOI: https://doi.org/10.1007/s00500-024-09864-z