
Abstract
The main focus of this paper is to develop a new safety-based restricted fixed charge solid transportation problem with type-2 fuzzy parameter that minimizes both cost and time. Here we develop mainly two models, the first one has cost and time as type-2 fuzzy variables and the second one has cost, time and all the other parameters of the solid transportation problem as type-2 fuzzy variables. We also consider restrictions on the amount of transport goods. Both of these models are solved by two different techniques. First is using the usual credibility measure, and second is the generalized credibility measure. For the first technique, we use critical value (CV)-based reduction method to reduce a type-2 fuzzy set into a type-1 fuzzy set and then apply the centroid method to this reduced fuzzy set to find the corresponding crisp value. In the second case, a chance constrained programming model based on generalized credibility has been developed with the help of CV-based reduction method. The equivalent parametric programming problem in deterministic form is then solved under the weighted mean programming technique framework, the global criteria method and with the help of LINGO 13.0 software. Lastly, we have provided two real-life-based numerical examples to illustrate the models and also validate the results with the existing work. Some sensitivity analyses for the models are also presented with some logical comments. Finally the effects of total cost and time due to the changes of credibility levels of cost, time, demand, source, conveyance and safety are discussed.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Transportation problem (TP) was formulated as a problem of linear programming problem (LPP), first by Hitchock [1] and then Balinski [2]. It is one of the most important and practical applications-based areas of operations research. The objective of TP is to transport various amounts of a single homogenous commodity, initially stored in different sources (or origins), to different destinations in such a way that the total cost of transporting is minimized. For this problem, the following information is needed.
-
Available amounts of the commodity at different origins.
-
Amounts demanded at different destinations.
-
The transportation costs of a unit of commodity from various origins to various destinations.
Mathematically the transportation problem is stated as
where \( \varvec{C} \) is a row vector, \( \varvec{x} \) is a column vector. \( \varvec{A} = \left[ {\varvec{\alpha}_{{{\mathbf{11}}}} ,\varvec{\alpha}_{{{\mathbf{12}}}} , \ldots ,\varvec{\alpha}_{{\varvec{mn}}} } \right] \) the coefficient matrix in which \( \varvec{\alpha}_{{\varvec{ij}}} \) the column vector associated with the variable \( x_{ij} \) and \( \varvec{b} \) a column vector that consists of \( \left( {m + n} \right) \) components. Here the constraint is of equal type constraint, but it can be less or greater than type, and with these types of constraint, the problem is called unbalanced transportation problem.
A transportation problem with three constraints viz. source, destination and conveyance constraints is called a solid transportation problem (STP), which was introduced by Haley [3]. Recently STP has gained much attention to the researchers for modeling in both fuzzy and crisp environments. The data related to an STP may not be all the time crisp in nature, it can be fuzzy due to the data collected from multiple sources, absence of any information about the data, fluctuating financial market, imperfect statistical analysis. For this situation in STP, the fuzzy set is appropriate to handle the fuzziness. Such type of STPs is called fuzzy STP (FSTP). Kundu et al. [4], Liu [5], Ammar et al. [6], Bit et al. [7], Ojha et al. [8] investigated different models of FSTP. Recently, Kundu et al. [9] presented a multi-item STP with type-2 fuzzy parameters. Mahapatra et al. [10] investigated the transportation problem in stochastic environment. For a TP considering safety factor has now become an important issue. While transporting the items from sources to destinations via different conveyances, it is natural to have some amounts of goods/items lost/stolen, if there is no proper safety arrangement. Regarding this recently Baidya et al. [11] presented a multi-item interval valued STP with the safety measure under fuzzy-stochastic environment, where they considered a safety constraint in the mathematical model. Also by the same authors in [12], different solution techniques for a multi-item interval valued STP with safety measure have been discussed. Sometimes in a transportation system, it was found that, for a particular destination/route, a smaller quantity of goods/items is available for transportation. This transportation consumes some time, which brings an effect in the total transportation time. Moreover, the decision makers (DM) sometimes face problems like as traffic jams, damage of transport items, extra tool cost. In such a situation for optimizing the total transportation time, DM can put a restriction on the transported amount along a route. This means that DM considers those destination/routes where the transported amount is greater than or equal to the desired amount \( p \); otherwise, DM does not transport the amount through that destination/route.
In transportation problem, “fixed charge” is charged for different reasons, such as tax for interstate border crossing, road permit fees, toll charges. These extra costs are totally different from the unit transportation cost. Adlakha et al. [13, 14], Xie et al. [15] and Raj et al. [16] presented fixed charge transportation problems (FCTP). Yang et al. [17, 18] and Ojha et al. [19] also presented fixed charge STP. Recently Kundu et al. [20] investigated a fixed charge transportation problem with type-2 fuzzy parameters. In most of the fixed charge transportation problems, researchers have considered fixed charge without any restriction on it. But in real life, sometimes there may be a case where fixed charges are restricted, for example, restriction due to vehicles types, restriction for nature of transported items, government concession rule for interstate transport policy, etc. So study of restricted fixed charge in transportation problem will be definitely useful. When a fixed charge is charged in a TP, then the corresponding objective function may be stated as
where \( F \) is an \( m \times n \) row vector. Like fixed charge, many factors can also be considered in the objective function, e.g., safety cost, processing charge, different type of penalty cost.
There are some classical methods such as northwest corner method, row-minima method, column-minima method, matrix-minima method, Vogel’s approximation method to solve a TP. But for the three-dimensional formulation, solution of STP using classical methods is not possible in most cases. Normally a researcher depends on soft computing to solve the STP. Here, we depict a scenario of the literature development and solution procedures of TP and STP in Table 1.
Therefore, the main issues related to real-life situation which motivated us to make this research/study can be identified as follows.
-
Solid transportation problem, where different vehicles are available for transportations of goods from sources to destinations, is a common phenomenon in real-life TPs.
-
Transportation models with fixed charge are available in the literature, where fixed charge is considered without any kind of restriction. But in real-life situation, there are some cases where this fixed charge is restricted due to vehicle types, following Government concession rule for interstate transport policy. For example, two wheelers, Govt. vehicles, are normally exempted from toll taxes (fixed charges). So consideration of this restricted fixed charge in TP is a real-life phenomenon.
-
Time is an important factor in TPs. In some cases, less transportation time saves/minimizes the wastage/breakability of items/dissatisfaction of customers, etc. So, minimization of time along with the transportation cost should be considered.
-
In some real-life problems, transportation of little amount of goods (less than a certain fixed amount) through the routes is not feasible/beneficial in terms of time or other factors. So, the restriction on the amounts of the transported goods is required for minimum total transportation time.
-
Safety is another important issue for the smooth functioning of the transportation system. This is very much relevant in the case of developing countries, like Pakistan, India, and Afghanistan, where terrorism/insurgency prevails. Hence in TPs, minimum safety for transportation is required.
-
In real-life TPs, along a particular route, all types of vehicles cannot be used. For example, in a narrow path, big vehicles cannot move. Hence, restrictions on some vehicles along some particular routes are required.
-
Moreover, the occurrence of impreciseness in transportation system is often observed. On this matter, a number of research works are available in the literature. They have used different tools to handle this impreciseness, for example, fuzzy, stochastic, random fuzzy, uncertainty, type-2 fuzzy. Among these, type-2 fuzzy furnishes more impreciseness. So use of triangular type-2 fuzzy sets in transportation may be considered.
The above lacunas prompted us to consider the present models in which the above factors have been taken into account.
This paper mainly presents an easy and efficient defuzzification method of general type-2 fuzzy sets and introduces a new solid transportation problem based on type-2 fuzzy sets that can handle uncertainty in a large scale. For the first time, such a type of solid transportation problem is investigated in this paper. Here we consider two models with costs and times as type-2 fuzzy in one and in another, time, cost and all other parameters are type-2 fuzzy. A two-stage defuzzification method of general type-2 fuzzy sets is introduced with the help of CV-based reduction method for type-2 fuzzy variable and centroid method for type-1 fuzzy sets. We apply the usual and general credibility to the models and then using the CV-based reduction method and chance constrained programming method, we completely defuzzify the type-2 fuzzy parameters. The deterministic STPs are solved to get the optimal solution by a nonlinear optimization technique—generalized reduced gradient (GRG) method using LINGO 13.0 software. Four different numerical experiments are set to illustrate the problems and techniques. Finally, sensitivity analyses on the basis of different generalized credibility levels are presented.
The organization of this paper is as follows. Section 1 is introduction. Next in Sects. 2 and 3 both the models are formulated. The solution techniques are defined in Sect. 4. In Sect. 4 numerical experiments also are done for the proposed models. The optimal results of numerical experiments are given in Sect. 5. With two subsections named as “verification with the earlier works” and “sensitivity analysis,” Sect. 6 named as “Discussions,” validates the proposed methodology and the logical correctness. Application to a real-life problem is discussed in Sect. 7. Last Sect. 8 gives the conclusion and future scope. Appendix is enclosed, which provides theorems and their proofs with numerical examples. At the end a reference list is attached.
2 Model-I formulation with type-2 fuzzy parameters (time and cost are type-2 fuzzy variable)
Type-2 fuzzy sets generalize the type-1 fuzzy sets so that more uncertainties can be handled. This concept was first proposed by Zadeh [21] in 1975. A type-2 fuzzy set incorporates uncertainty about the membership function (MF) of the primary fuzzy set, called type-1 fuzzy set. Thus, for type-2 fuzzy sets, the membership grades themselves are fuzzy sets in [0, 1]. So many research works have been done based on the theory of type-2 fuzzy set. Yager [22] applied the type-2 fuzzy sets to decision making. Coupland and John [23] presented the geometric type-1 and type-2 fuzzy logic system. Mendel [24] pointed out the advances of type-2 fuzzy sets and systems. Important properties and operations on triangular type-2 fuzzy sets are investigated in [25, 26]. In most of our real-life situations, we often face the uncertain condition for different causes, like some inaccuracies in information, lack of observed data about the unknown state of nature, bad statistical analysis. Sometimes it is not easy to define the exact membership grades to the member of a fuzzy set. For this situation of difficulty, we are unable to define the problem. But in that case, if we use type-2 fuzzy set instead of type-1 fuzzy set, then we can formulate the problem more realistically. Now a days type-2 fuzzy set are widely used by many researchers in their different research works to handle the fuzziness.
2.1 Representation of real-world transportation scenario as type-2 fuzzy problems
The state ‘Agartala, Tripura’ is in the corner of ‘India’ having boundary with foreign country ‘Bangladesh’. The mainland like ‘Delhi’, ‘Kolkata’, etc., of India is connected via the plain and hilly tracks through forests, deserts, rivers etc. At any time of journey, a mishap like landslides, hill slides, road caving, terrorist attacks, forcible collection, etc., may happen. The transportation of goods to ‘Agartala’ from ‘Delhi’ (say) is a risky trouble-some and time-consuming task, only the expert and previous experienced drivers can run the vehicles. Thus, in such a situation, the transportation time is completely uncertainly estimated by the different drivers from their own experiences. Suppose for the journey from ‘Delhi’ to ‘Agartala’, journey time by different experts, may be about 6, 6.5, 6.8, 7.2 days (say) each of which is a fuzzy number represented by a crisp membership function. Thus, this membership functions can again be expressed by a membership function of a fuzzy number. Hence, the travel time is again represented by a type-2 fuzzy number. Similar may be the case for ‘fixed charge’ as the forcible collections by the different insurgent groups are unpredictable in addition to fixed highway toll collection. No one knows how many such forcible collections, of what amounts will be faced in one journey. Here again, in the beginning of a trip, if a guess about the ‘fixed charge’ is made by the experts, it becomes a type-2 fuzzy number as illustrated for transportation time. Similar is the case for transportation costs. Thus, in the present investigation, transportation cost, transportation time and fixed charge are assumed to be fuzzy type-2 numbers.
The process that completely defuzzifies a type-2 fuzzy set consists of two steps. At first, type reduction, i.e., in this step, a type-2 fuzzy set is reduced to a type-1 fuzzy set, known as type-reduced set (TRS). After that this TRS can be turned into a crisp value by using several easy methods like centroid method, expected value method. Many researchers have developed different methods to defuzzify a type-2 fuzzy set. Karnik and Mendel [27] studied centroid of a type-2 fuzzy set. Greenfield, John and Coupland [28] introduced a novel sampling method for type-2 defuzzification. Liu [29] have proposed an efficient centroid type-reduction strategy for general type-2 fuzzy logic system. Geometric defuzzification method proposed by Coupland and John [23] transforms a type-2 fuzzy set into a geometric type-2 fuzzy set. Qin et al. [30] introduced an effective defuzzification method based on critical values of regular fuzzy variable (RFV) which is CV-based reduction method.
For a TP, the total transportation cost and total transportation time play an important role. Our main objective is to minimize these values. In different real-life situations, these two parameters become uncertain in nature; then decision makers are in difficulty to make the optimal decision. This situation can be handled with type-2 fuzzy variables. In this model, we consider time and cost as type-2 fuzzy variables. Here we formulate a STP model with \( m \) sources, \( n \) destinations and \( l \) conveyances. The model is as follows:
If in a particular destination, the negligible amount of quantity (\( p \), say) is transported, then the DM cannot deliver commodities in the particular destination. This means if \( x_{ijk} \ge p \), a desired real number is imposed, then we consider the restriction for this route as a part of the transportation. Thus, for the expediency of modeling, the following notation is introduced:
The second term of objective function defines the restricted fixed charge for some particular conveyances used in transportation. Here \( \tilde{f}_{ijk}^{e} \) is the restricted fixed charge, and it is multiplied by a decision variable \( m_{ijk}^{e} \), which defined as follows
and used to decide, if a restricted conveyance suppose the \( k \)-th conveyance is used to transport the goods (\( x_{ijk} \)) from the \( i \)th source to the \( j \)th destination, then the corresponding restricted fixed charge (\( \tilde{f}_{ijk}^{e} \)) will be multiplied by 1 and added to the total cost; otherwise it will be zero. Here \( \tilde{c}_{ijk} \) is the type-2 fuzzy penalty cost for transporting goods from source \( i \) to \( j \) destinations by means of \( l \) conveyances; \( \tilde{t}_{ijk} \) is the type-2 fuzzy time associated with the route where the transport has been made. Here we consider the transportation time for a route \( \left( {i, j} \right) \) only if any transportation activity is assigned to that route. So \( y_{ijk} \) is defined such that if \( x_{ijk} \ge 0 \) then \( y_{ijk} = 1 \); otherwise it will be zero. \( a_{i} , b_{j} \,{\text{and }}\,e_{k} \) are the crisp amount of available products at \( i \) sources, demand of the products at \( j \) destination and conveyances capacities of \( l \) different conveyances, respectively.
Here the constraints (1c)–(1g) are defined as follows.
-
The first constraint (1c) of the above model implies that the total amount transported from source \( i \) must not exceed its supply capacity \( a_{i} \).
-
The second constraint (1d) implies that total amount transported from all the source should satisfy the demand of destinations \( j \).
-
The third constraint (1e) implies that the transported amount from source to destinations by conveyance must not exceed its conveyance capacity.
-
The fourth constraint (1g) means the total safety measure should be greater than the desired safety measure (B) for the whole transportation problem. Here \( s_{ijk } \) is the per unit safety factor for the route \( (i \), \( j) \) using \( l \) conveyance.
-
The last constraint (1f) is the non-negativity restriction for transported amount with a binary function.
And \( x_{ijk} \) is the decision variable representing the amount of product transported from source \( i \) to destinations \( j \) by \( k \) conveyances for all \( i, j, k \).
2.2 Case-I: STP with type-2 fuzzy cost and time based on usual credibility
In this model, we take transportation costs and times as type-2 fuzzy variables. To defuzzify these type-2 fuzzy variables, we apply CV-based reduction method based on usual credibility measure to them and derive the type-reduced form i.e., type-1 fuzzy set. Next we apply the centroid method to these type-reduced sets to get the corresponding crisp values. The mathematical model is same as (1a)–(1g).
2.3 Case-II: STP with type-2 fuzzy cost and time based on generalized credibility
Since the type-reduced set (TRS) obtained using the CV-based reduction method, may or may not be normalized, so we cannot use the usual credibility, in that case we have to use the generalized credibility measure. As the problem is a minimization problem, we develop a chance constrained programming model as follows:

and the constraint (1g).
Here \( {\text{Min}}\, \tilde{f} \) states the minimum value that the objective functions achieve with at least generalized credibility \( \alpha^{c} \in \left( {0, 1} \right], \alpha^{t} \in \left( {0, 1} \right], \alpha_{i} , \beta_{j} , \gamma_{k} \, {\text{and }}\,\delta_{s} \in \left( {0, 1} \right] \) are predetermined generalized credibility levels of satisfaction of the sources, destinations, conveyances and safety, respectively. \( \alpha^{c} \) and \( \alpha^{t} \) have been used for cost and time objectives, respectively.
2.4 Type reduction and defuzzification of type-2 fuzzy sets
All the preliminaries including theorems and numerical examples in connection with type-2 fuzzy sets, their reduction and defuzzification are given in “Appendx”.
2.5 Defuzzification
As the unit transportation cost and the transportation time in the above model are type-2 fuzzy variables, we have to defuzzify these variables. To do this, we use the CV-based reduction method, which are presented in “Appendix”. In this method, we use usual credibility and generalized credibility for the defuzzification process. After that, we apply the centroid method to the TRS to find the corresponding crisp values.
2.6 Crisp equivalences
Suppose \( \tilde{c}_{ijk} = \left( {c_{ijk}^{1} , c_{ijk}^{2} , c_{ijk}^{3} ; \theta_{l, ijk}^{\prime } , \theta_{r, ijk}^{\prime } } \right),\quad \tilde{t}_{ijk} = \left( {t_{ijk}^{1} , t_{ijk}^{2} , t_{ijk}^{3} ; \theta_{l, ijk}^{\prime \prime } , \theta_{r, ijk}^{\prime \prime } } \right) \) and \( \tilde{f}_{ijk}^{e} = \left( {f_{ijk}^{1} , f_{ijk}^{2} , f_{ijk}^{3} ; \,\theta_{l, ijk}^{\prime \prime \prime } , \theta_{r, ijk}^{\prime \prime \prime } } \right) \) are type-2 fuzzy variables. Also \( \tilde{c}_{ijk}^{\prime } , \tilde{t}_{ijk}^{\prime } \, {\text{and}}\, \tilde{f}_{ijk}^{\prime e} \) are the corresponding type-reduced forms by CV-based reduction method. Then by “Theorem (Qin et al. [30])” in Appendix section and its “Corollary" in Appendix section”, the chance constrained model (2a)–(2f) can take the form of crisp equivalent parametric programming problems as:
Case 10 < α ≤ 0.25: Then the equivalent parametric programming problem for the model representation (2a)–(2b) is
Case 20.25 < α ≤ 0.5: Then the equivalent parametric programming problem for the model representation is
Case 30.5 < α ≤ 0.75: Then the equivalent parametric programming problem for the model representation is
Case 40.75 < α ≤ 1: Then the equivalent parametric programming problem for the model representation is
3 Model-II formulation with type-2 fuzzy parameters (time, cost, restricted fixed charge, supplies, demand conveyances and safety are type-2 fuzzy variables)
Here we formulate a STP model with \( m \) sources, \( n \) destinations and \( l \) conveyances, i.e., mode of transport and unit transportation cost, time, supplies, demand and conveyances are as type-2 fuzzy variables. Mathematically MODEL-II can be stated as MODEL-I, i.e., Eqs. (1a)–(1g), replacing \( a_{i} , b_{j} , e_{k} \, {\text{and}}\, s_{ijk} \) by the corresponding type-2 fuzzy variables. Here in MODEL-II, the constraints of MODEL-I are type-2 fuzzy in nature. The reason is described shortly below.
Sometimes in transportation problem, it has been observed that the capacity of source, demands from the destinations and the capacity of different vehicles become inexact due to the different experts’ opinions, weather conditions, insurgency, bad condition of roads. In such a situation, it is not possible to express the values of \( a_{i} , b_{j} \, {\text{and }}\,e_{k} \) in crisp numbers, we have to use fuzzy concept.
The type-2 fuzzy sets have the ability to deal with uncertainty especially when the choice of a decision has to be decided by many experts. Modelling a word by fuzzy set is considered difficult since a word can be analyzed in different ways by many experts, and sometimes it is not easy to determine the exact MF. In these cases, each expert’s opinion is a MF of type-1 and thus, this MF again becomes fuzzy. The final opinion of all experts’ is expressed by a type-2 fuzzy set. In such cases, as we are dealing with uncertainty, type-2 fuzzy sets are supposed to be very useful. Also type-2 fuzzy set is a second-order approximation to uncertainty, whereas type-1 fuzzy is of first order. This is the reason for which we adopt the type-2 fuzzy in this problem.
3.1 Case-I: Using the usual credibility
In this model, we take transportation cost, time, source, demand and conveyance capacities as type-2 fuzzy variables. To defuzzify these type-2 fuzzy variables, we apply CV-based reduction method based on usual credibility measure to them and derive the type-reduced form, i.e., type-1 fuzzy set. Next we apply the centroid method to these type-reduced sets to get the corresponding crisp values. The mathematical model is same as MODEL-II.
3.2 Case-II: Using the generalized credibility
In this method, we discuss how the MODEL-II can be solved using the generalized credibility technique. Suppose \( \tilde{c}_{ijk}^{\prime } \),\( \tilde{t}_{ijk}^{\prime } \),\( \tilde{a}_{i}^{\prime } \), \( \tilde{b}_{j}^{\prime } \) and \( \tilde{e}_{k}^{\prime } \) are the reduced type-1 fuzzy sets(may not be normalized) of the type-2 fuzzy sets \( \tilde{c}_{ijk}^{\prime } \), \( \tilde{t}_{ijk}^{\prime } \), \( \tilde{a}_{i} \), \( \tilde{b}_{j} \) and \( \tilde{e}_{k} \), respectively, according to CV-based reduction method. Now to solve the above problem, we formulate a chance constrained programming model with these reduced fuzzy parameters. Chance constrained programming with fuzzy (type-1) parameters was developed by Liu and Iwamura [31].
So we develop a chance constrained programming model and the model is

with constraints (1g), (2a), (2b) and (2f).
Here \( {\text{Min }}\tilde{f} \) states the minimum value that the objective function achieves with at least generalized credibility \( \alpha^{c} \in \left( {0, 1} \right], \alpha^{t} \in \left( {0, 1} \right], \alpha_{i} , \beta_{j} \,{\text{and}}\, \gamma_{k} \in \left( {0, 1} \right] \) is predetermined generalized credibility levels of satisfaction of the sources, destinations and conveyances, respectively, for all \( i, j ,k \).
3.3 Crisp equivalences
Suppose that \( \tilde{c}_{ijk} ,\tilde{t}_{ijk} ,\tilde{f}_{ijk}^{e} ,\tilde{a}_{i} ,\tilde{b}_{j} ,\tilde{e}_{k} \,{\text{and}}\, \)\( \tilde{s}_{ijk} \) are all mutually independent type-2 triangular fuzzy variables defined by \( \tilde{c}_{ijk} = \left( {c_{ijk}^{1} , c_{ijk}^{2} , c_{ijk}^{3} ; \theta_{l,ijk}^{\prime } , \theta_{r,ijk}^{\prime } } \right) \), \( \tilde{t}_{ijk} = \left( {t_{ijk}^{1} , t_{ijk}^{2} , t_{ijk}^{3} ; \theta_{l,ijk}^{\prime } , \theta_{r,ijk}^{\prime } } \right) \), \( \tilde{f}_{ijk}^{e} = \left( {f_{ijk}^{1} , f_{ijk}^{2} , f_{ijk}^{3} ; \theta_{l,ijk}^{\prime \prime \prime } , \theta_{r,ijk}^{\prime \prime \prime } } \right) \)\( \tilde{a}_{i} = \left( {a_{i}^{1} , a_{i}^{2} , a_{i}^{3} ; \theta_{l, i}^{\prime } , \theta_{r, i}^{\prime } } \right) \), \( \tilde{b}_{j} = \left( {b_{j}^{1} , b_{j}^{2} , b_{j}^{3} ; \theta_{l, j}^{\prime } , \theta_{r,j}^{\prime } } \right), \quad \tilde{e}_{k} = \left( {e_{k}^{1} , e_{k}^{2} , e_{k}^{3} ; \theta_{l, k}^{\prime } , \theta_{r, k}^{\prime } } \right) \) and \( \tilde{s}_{ijk} = \left( {s_{ijk}^{1} , s_{ijkk}^{2} , s_{ijk}^{3} ; \theta_{l,ijk}^{\prime v} , \theta_{r,ijk}^{\prime v} } \right) \) are type-2 fuzzy variables. Also let \( \tilde{c}_{ijk}^{\prime } ,\tilde{t}_{ijk}^{\prime } ,\tilde{f}_{ijk}^{\prime } ,\tilde{a}_{i}^{\prime } ,\tilde{b}_{j}^{\prime } \, {\text{and}}\,\tilde{e}_{k}^{\prime } \) are the corresponding type-reduced form obtained by (“Defuzzification of a type-2 fuzzy variable by CV-based reduction method section in Appendix”) CV-based reduction method. Then by “Theorem (Qin et al. [30])in Appendix section ” and its “Corollary in Appendix section,” the chance constrained model can take the form of crisp equivalent parametric programming problems as:
Case-I: 0 < α ≤ 0.25: Then the equivalent parametric programming problem for the model representation (7) is
with constraint (1g). Where \( F_{{a_{i} }} \), \( F_{{b_{j} }} \), \( F_{{e_{k} }} \) are given by the following (12), (13) and (14), respectively.
Case-II: 0.25 < α ≤ 0.5: Then the equivalent parametric programming problem for the model representation (7) is
where \( F_{{a_{i} }} \), \( F_{{b_{j} }} \), \( F_{{e_{k} }} \) are given by the following (12), (13) and (14), respectively.
Case-III: 0.5 < α ≤ 0.75: Then the equivalent parametric programming problem for the model representation (7) is
where \( F_{{a_{i} }} \), \( F_{{b_{j} }} \), \( F_{{e_{k} }} \) are given by the following (12), (13) and (14), respectively.
Case-IV: 0.75 < α ≤ 1: Then the equivalent parametric programming problem for the model representation (7) is
where \( F_{{a_{i} }} \), \( F_{{b_{j} }} \), \( F_{{e_{k} }} \) are given by the following (12), (13) and (14), respectively.where
4 Solution with numerical data
Here all the problems (3)–(6) and (8a–8f)–(11) after defuzzification are linear in decision variable \( x_{ijk} \)’s and the above models are multi-objective optimization problem, which can be solved by weighted sum method. So the reduced problem can be solved using LINGO 13.0 solver, based upon a gradient-based operation method—generalized reduced gradient (GRG) method.
LINGO is a comprehensive tool designed to make building and solving linear, nonlinear (convex and non-convex/Global), and Quadratic, Quadratically Constrained, Second-Order Cone, Stochastic, and Integer optimization models faster, easier and more efficient. This procedure is one of a class of techniques called reduced gradient or gradient projection methods which is based on extending methods for linear constraints to apply to nonlinear constraints. They adjust the variables so the active constraints continue to be satisfied. In our research investigation, we use Hyper Lingo 13.0. Using this software we can solve a model having 8000 variables, 800 integers, 800 nonlinear variables, 20 global variables and 4000 constraints. Since LINGO 13.0 software package, consists of exact method and also faster than any other meta-heuristic algorithm, we use it to get the global exact optimal solutions.
4.1 Techniques to solve a crisp multi-objective linear/nonlinear problem
As the proposed problem is a multi-objective problem we cannot solve this problem directly. Hence to solve the problem we use the weighted sum method and the fuzzy programming technique. Here the steps are discussed as followed:
4.1.1 Weighted sum method
The weighted sum method secularizes a set of objectives into a single objective by multiplying each objective with user’s supplied weights. The weights of an objective are usually chosen in proportion to the objective’s relative importance in the problem. However setting up an appropriate weight vector depends on the scaling of each objective function. It is likely that different objectives take different orders of magnitude. When such objectives are weighted to form a composite objective function, it would be better to scale them appropriately so that each objective possesses more or less the same order of magnitude. This process is called normalization of objectives. After the objectives are normalized, a composite objective function \( F \) is formed by summing the weighted normalized objectives and the MOSTP is then converted to a single-objective optimization problem as follows:
Here, \( \omega_{l} \) is the weight of the lth objective function. Since the minimum of the above problem does not change if all the weights are multiplied by a constant, it is the usual practice to choose weights such that their sum is one, i.e., \( \sum\nolimits_{l = 1}^{L} {\omega_{l} = 1} \).
4.1.2 Global criteria method
The multi-objective nonlinear programming (MONLP) problems may be solved by global criteria method converting it to a single-objective optimization problem. The solution procedure is as follows:
-
Step 1 Solve the multi-objective programming problem as a single-objective problem using one objective at a time ignoring the others.
-
Step 2 From the results of Step 1, determine the ideal objective vector, say (\( f_{1}^{\hbox{min} } , f_{2}^{\hbox{min} } ,f_{3}^{\hbox{min} } , \ldots ,f_{k}^{\hbox{min} } \)) and the corresponding values of (\( f_{1}^{\hbox{max} } , f_{2}^{\hbox{max} } ,f_{3}^{\hbox{max} } , \ldots ,f_{k}^{\hbox{max} } \)). Here the ideal objective vector is used as a reference point. The problem is then to solve the following auxiliary problem:
Find \( x = \left( {x_{1} ,x_{2} , \ldots ,x_{n} } \right)^{T} \)which minimizes GCSubject to
$$ g_{j} \left( x \right) \le 0, \quad j = 1,2,3, \ldots ,m $$$$ x_{i} \ge 0, \quad i = 1,2, \ldots ,n $$where
$$ {\text{GC}} = {\text{Minimize}}\,\left\{ {\mathop \sum \limits_{i = 1}^{k} \left( {\frac{{f_{i} \left( x \right) - f_{i}^{\hbox{min} } }}{{f_{i}^{\hbox{max} } - f_{i}^{\hbox{min} } }}} \right)^{p} } \right\}^{{\frac{1}{p}}} , $$or
$$ {\text{GC}} = {\text{Minimize}}\,\left\{ {\mathop \sum \limits_{i = 1}^{k} \left( {\frac{{f_{i} \left( x \right) - f_{i}^{\hbox{min} } }}{{f_{i}^{\hbox{min} } }}} \right)^{p} } \right\}^{{\frac{1}{p}}} , $$where \( 1 \le p < \infty . \) An usual value of p is 2. This method is also sometimes called compromise programming.
-
Step 3 Now, solve the above single-objective problem described in Step 2 by GRG method to obtain the compromise solution.
Here four real-life numerical experiments are presented to illustrate the models and methods. After defuzzification, these models are solved using the standard optimizer LINGO 13.0 software.
4.2 Real-life data
A manure merchant of Tripura, Shreeram Fertilizers & Agro Chemicals, has three branches at Dharmanagar, Agartala and Belonia of Tripura and sells Urea from these branches. This agency purchases Urea from the suppliers of Guwahati and Silchar of Assam and transports using Trucks and Dumpers. From the available data of this Agency, the fluctuating unit transportation cost, fixed charges and transportation time are represented as type-2 fuzzy numbers with the help of experts/experienced business men. These data are presented in Tables 2 and 3. Here the requirements at the three destinations, availabilities at two sources and two conveyance’s capacities and safety measures are deterministic. The values of the safety measures are taken following expert’s opinion.
4.2.1 MODEL-I (Case-I)
To illustrate the first model, we consider a problem with two sources, thee destinations and two conveyances, i.e., \( i = 1, 2; \;j = 1, 2, 3; \;k = 1, 2 \). Here the corresponding type-2 fuzzy cost and time are given. We minimize the total cost (in $) and time (in hour).
And the corresponding crisp source availability, demand and conveyances capacities are as \( a_{1} = 21,\;a_{2} = 29,\;b_{1} = 20,\;b_{2} = 13,\;b_{3} = 17,\;e_{1} = 26,\;e_{2} = 24. \) Also here we consider the restricted amount of goods by 3 unit, i.e., here \( p = 3 \). The total desire safety measure is taken as 15, i.e., \( B = 15 \) for both the models.
To solve the problem we first convert the type-2 fuzzy cost, fixed charge and time into its corresponding crisp value and for that we use the CV-based reduction method, using this crisp valued cost, fixed charge and time so obtained, we solved the problem and the optimum results are given in Table 10.
4.3 MODEL-I (Case-II)
Now using the generalized credibility, we solved the MODEL-I and the data for transportation cost, time and restricted fixed charge are presented in Table 4.
And the corresponding crisp source availability, demand, conveyances capacities restricted amount of goods and per unit safety are the same as MODEL-I (Case-I).
All the predetermined general credibility levels are chosen for our problem as 0.85, i.e., \( \alpha^{c} , \alpha^{t} \) and \( \alpha^{f} \) are equal to 0.85. The equivalent parametric programming problem is as follows.
Since here we take the predetermined general credibility level as 0.85 so here we consider Case-IV to formulate the parametric programming problem
4.4 MODEL-II (Case-I)
To illustrate the second model, we consider a problem with two sources, three destinations and two conveyances where all the transportation parameters are type-2 fuzzy numbers. Here the corresponding type-2 fuzzy costs, times and restricted fixed charge are same as MODEL-I (cf. Table 2). Also we assume the safety cost, available source, demand, conveyances capacities as type-2 fuzzy numbers given in Tables 5, 6, 7.
Here we consider the restricted amount of goods by 3 unit, i.e., here p = 3. To solve the problem, we first convert all the type-2 fuzzy parameters into its corresponding crisp value and for that we use the CV-based reduction method, and then solved.
The results are given in Table 10.
4.5 MODEL-II (Case-II)
Now using the generalized credibility, we solve the MODEL-II and for that, the data are taken as follows:
The type-2 fuzzy cost, restricted fixed charge and time are the same as in Table 4 and the corresponding type-2 fuzzy per unit safety cost and the different type-2 fuzzy parameters of transportation, i.e., available source, demand and conveyance capacities, are given in Tables 8 and 9, respectively.
All the predetermined general credibility levels are chosen for our problem as 0.85, i.e., \( \alpha^{c} , \alpha^{f} , \alpha^{t} , \alpha_{i} , \beta_{j} , \gamma_{k} \,{\text{and}}\, \delta_{s} \) are equal to 0.85 for all \( i, j ,k \). Here we consider the restricted amount of goods by 3 unit, i.e., here \( p = 3 \). The equivalent parametric programming problem is as follows.
Since here we take the predetermined general credibility level as 0.85, so here we consider Case-IV to formulate the parametric programming problem as
We solve the problem and get the optimal solution.
5 Results
Optimal solution under the above-mentioned different methods for MODEL-I and II is given in Table 10.
In Table 10, Z1 indicates the total transportation cost and Z2 stands for total transportation time. The variable \( x_{231} = 17.0 \) means that, from the source point named as 2 to the destination named as 3 using the conveyance named as 1, the transported amount is 17.0 units (may be weight). Similar meaning is applicable for other variables also.
5.1 Comparison between the results obtained using weighted sum and global criteria method
We solve both models using two different techniques and the respective solutions are given in Table 10. Here we observe that when we use the global criteria method to solve the problem, then the total cost of transportation for MODEL-I and II is greater than the cost obtained using the weighted sum method for both cases. So in that case we conclude that the weighted sum method is more acceptable, as it gives us the minimum cost 1.
But in case of total transportation time minimization, except the MODEL-I (Case-I) all the models give minimum time when the weighted sum method is compared with the global criteria method. Also it can be observed that for the MODEL-I (Case-I), the difference between the total time is 0.88 h. which can be tolerable with a certain degree, although global criteria method gives the minimum cost in that case. So overall it can be concluded here that the weighted sum method is the best compared to the global criteria method for solving this type of multi-objective decision-making optimization problem.
From Table 10, it can be observed that the total amount of transported goods from its different source points to the destinations are as follows, for MODEL-I (Case-I), MODEL-II (Case-I and Case-II) it is 50 units and for MODEL-I (Case-II) it is 49.99 units, where the solution has been obtained using the weighted sum method. In case of global criteria method we observe that the total transported goods is 50 unit for the MODEL-I (Case-I and Case-II), MODEL-II (Case-I), but in case of MODEL-II (Case-II) it is 49.98 units. Using these total transported goods, we have calculated the average transportation cost for each model, dividing the total transportation cost by the total transported amounts of goods. The average costs of the different models are presented in Table 11.
One can observe from Table 11 that the average cost for each model is minimum when the solution is obtained using the weighted sum method compared to the global criteria method. Although the difference is very small, it can make a large impact on a big business management. In this regard, the use of weighted sum method is fruitful compare to the global criteria method.
6 Some particular cases
6.1 Verification with the earlier works
In [20], Kundu et al. developed a traditional transportation model with fixed charge in type-2 fuzzy environment. They have taken the fixed charge without any restriction. Hence, not considering the conveyances and safety factors, omitting the restrictions on transported amount and fixed charge, the present problem reduces to the problem of Kundu et al. [20]. With their numerical data for MODEL-I (data from section 8.1 of [20]), we obtained almost the same result of Kundu et al. [20] which is presented in Table 12.
Recently Das et al. [32] developed the defuzzification method for trapezoidal type-2 fuzzy variable and successfully applied to STP. Here to make a comparison, we have considered there problem, in which they have considered two objectives to optimize, one is cost and another is time. In the following, we have presented a discussion on the conversion of trapezoidal membership to triangular form.
A trapezoidal MF is represented by the four points on the axis line where the four points are a lower limit, a lower support limit, an upper support limit and an upper limit, respectively, whereas the triangular MF represents using a lower limit, a mean value and an upper limit. For a trapezoidal MF, the value of membership is 1 between the lower support and upper support limit and in case of triangular MF the value of membership is 1 at mean value point. Whenever the lower support limit and upper support limit equal, then a trapezoidal MF becomes a triangular MF, and using this property we have converted the trapezoidal type-2 fuzzy variable to triangular type-2 fuzzy variable keeping the same foot print of uncertainty for the type-2 fuzzy set. In [32] Das et al. solved a multi-objective STP in trapezoidal type-2 fuzzy environment where they have considered all the parameters are as trapezoidal type-2 fuzzy. To make a comparison of our proposed methodology with their methodology first, we convert the different parameters presented in Tables 1 and 2, section. 5.3, p. 2442 of Das et al. [32] and then defuzzify them using the triangular defuzzification formula proposed in this paper. With these defuzzified parameters, we solved their problem and the results are presented in Table 13. Here we find the mean value for triangular MF using the average of lower support limit and upper support limit.
From Table 13, we observed that the present investigation gives the lowest average cost as well as the lowest average time when we solved their problem with our methodology, and this happened due to the conversion of different parameters from trapezoidal to triangular. This conversion reduced the region of the footprint of uncertainty for the MF and hence the defuzzified values of parameters also become smaller compared to the values of Das et al. [32]. From which we can conclude that our methodology is working as good as we expected.
We have also made a comparative analysis with the defuzzification process proposed in this paper to the well-known Karnik–Mendel (KM) algorithm [27]. The results of the KM type reducer are obtained by first calculating the generalized centroid [\( c_{l} , c_{r} \)] of an IT2FS and then taking the average, i.e., the centroid \( x_{\text{c}} = \frac{{c_{l} + c_{r} }}{2} \), where [\( c_{l} , c_{r} \)] are the lower and upper bound of the type-reduced set obtained using the KM algorithm. But the KM algorithm is designed to deal with the interval type-2 fuzzy sets (IT2FS), and hence we have converted the each fuzzy inputs of our proposed MODEL-I to IT2FS inputs using the property that any number can be represented as an interval number by introducing the lower and upper limit of the interval as same. We solved the problem using the KM algorithm, and our proposed defuzzification method and the results are presented in Table 14.
Table 14 shows the optimal allocation, i.e., the solution in both methods is same, but their cost and transportation time are not same. In case of KM algorithm, it is higher than the proposed method and the reason is the defuzzification method. The proposed defuzzification is based on critical value, whereas the KM algorithm is mainly based on the centroid which is calculated by using the average of lower and upper bound of the type-reduced set.
6.2 A particular form of proposed MODEL-I (Case-I)
Models without (1) restrictions on transported amount and fixed charge; (2) deprived of conveyance and safety factor.
Here we present the results of total cost and time of MODEL-I (Case-I) only in Table 15.
6.3 Discussion and managerial insights
Discerning the optimal result of both models in Table 10, it is found that for transporting the same amount of goods (here it is 50 unit) with the same per unit transportation cost, restricted fixed charge, per unit time and per unit safety cost, the total transportation cost of MODEL-I (Case-I) becomes less compared to the MODEL-II (Case-I). Here the MODEL-I (Case-I) differs from MODEL-II (Case-I) by the source, demand and conveyance parameters where in MODEL-I, all these parameters are exactly known (crisp) and in MODEL-II, they are type-2 fuzzy in nature. But for time, it is the opposite. When generalized credibility is used for defuzzification of the fuzzy amount, we have the same observations. Also as we put restriction on the transported amount by 3 units, we noticed that the optimal transported amounts in each case are greater than this restricted amount, which reflected in Table 10. This is as per normal expectation.
This analysis is helpful for the managers of the transport agencies, especially for the trouble/disturbed area. In the northeast regions of India and similar regions of the other countries where insurgency prevails, managers of the transport agencies can restrict themselves to have a minimum total safety taking some risks and in that case, the present analysis gives the appropriate decisions. Changing the values of \( B \) (desired safety measure), the decision maker (DM) can find out the appropriate values.
If a manager decides to have a high safety factor (with large \( B \)) for his/her goods transportation, he/she can choose the value of \( B \) accordingly and select the corresponding routes for transportation form this analysis.
Again in real-life problems, amount of transportation of goods less than a certain quantity is not profitable. Unnecessarily, it involves more routes and increase total transportation time. For this reason, minimum amount of transported goods in each route is normally mentioned. For more economical decisions, DM may decide the appropriate minimum amount depending upon the practical situation following the present analysis.
Generally, imprecise values of the system parameters are assumed on the basis of experts’ opinions when sufficient past data of the system are not available. Here, type-2 fuzzy values give more precise values than the general type-1 fuzzy values, because the type-2 fuzzy set is a second-order approximation of uncertainty and the type-1 fuzzy is of the first order. Also it has been observed that in different experts’ opinions, uncertainty exists and hence each experts’ opinion becomes a type-1 MF, i.e., type-1 fuzzy value. Here the final opinion of all experts’ is expressed as type-2 fuzzy set. Thus, DM is able to take more appropriate precise decisions with the help of present analysis.
6.4 Sensitivity analysis
In this section, we provide sensitivity analysis to observe the efficiency and logically correctness of the method that we use to develop our proposed model with type-2 fuzzy sets. For different level of predetermined credibility levels for the objective functions and the constraints, the results are given in Table 16 and 17.
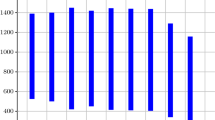
From Table 16, we observe that for increase in the credibility levels of cost (\( \alpha_{\text{c}} \)), the corresponding transportation cost increases with a variation in the transportation time. This happens due to the increase in the credibility levels of cost (\( \alpha_{\text{c}} \)). The defuzzified amount for cost also increases. In case of time, we see when \( \alpha_{\text{c}} = 0.78 \), then the transportation time is more compared to the other cases. This incident happens due to the restricted fixed charge; here all the vehicles are free from this restriction. Now when \( \alpha_{\text{t}} \) increases and \( \alpha_{\text{c}} \) is fixed, there is an increase in transportation time, but the transportation cost remains almost same. The reason for this is that, due to increase in the credibility levels of time (\( \alpha_{\text{t}} \)), the defuzzified amount also increases for time. Another thing when we increase the credibility level of restricted fixed charge (\( \alpha_{\text{f}} \)), we find an increase in the transportation cost, but it does not change the transportation time at all. The explanation here is that the fixed charge is a particular cost which to be adding with the unit transportation cost and it is not related with time. But in both cases, the total amount transported goods are same. The graphical representation of this phenomenon is shown in Fig. 1.

MODEL-I changes on cost and time for different credibility levels
Here we observe from Table 17 that, for an increase in the credibility levels of cost (\( \alpha_{\text{c}} \)), the corresponding transportation cost increases, but the time remains exactly the same except one case. This is for restriction on the amount of goods. For time (\( \alpha_{\text{t}} \)), the corresponding transportation costs do not differ much from each other and the total transportation time follows an irregular distribution. The reason can be explained as follows. Due to restriction on amount of transported goods, DM considers those routes where the amount of transported goods is more than or equal to the restricted amount. In doing so, the resultant total time is reduced. Same thing can be noticed in case of \( \alpha_{\text{f}} \), where the cost and time change in an irregular form. This is due to the restricted fixed charge and restriction on transported amount. Now it is observed here that the source capacity of each origin, demand of each destinations, capacity of conveyance increase as the credibility levels of source (\( \alpha_{i} \)), demand (\( \beta_{j} ) \) and conveyance (\( \gamma_{k} \)) increase, which results a slight variation in the total transportation cost and time, respectively. This is logically meaning full. Because if sources are available in a large amount, then the more number of transportation will take place in the system and so the total cost and time will surely increase. Same explanation can be given for demand and conveyance.
But in case of safety, we find a difference in time for the credibility level \( \delta_{\text{s}} = 0.80 \); here it becomes lesser by 1.73 units than the other cases. The explanation of this thing can be described; since there is a restriction on the amount of transported goods, DM considers only that route where the transported amounts of goods are greater than or equal to the restricted amount and the restricted amount can be adjusted through the routes through which goods are actually transported. As a result, the corresponding cost increases and the time decreases. This experiment with the stated explanation strongly validates for our proposed concept that restriction on the amount of transported goods will optimize the time, satisfying all demands of the system.
Here we present the pictorial representation for the MODEL-II on sensitivity analysis to show the effect on total transportation cost and time due to the change in credibility levels by Figs. 2 and 3, respectively.

MODEL-II changes on cost and time for different credibility levels

MODEL-II credibility level changes with respect to source, demand, conveyance and safety
7 Real-life application: a third party logistics of perishable product
Consider a third-party logistic (TPL) which is involved in transportation of fresh vegetables, fish and fruit in the state of Tripura from different source points to its respective destinations. Supplier-1 provides fish from source point-1 (S-1), fresh vegetable is provided by supplier-2 source point-2 (S-2) and fruit is provided by supplier-3 from source point-3 (S-3). The TPL provides two types of appropriate vehicles denoted as E-1 and E-2 to the different source points for the delivery of the products. In this system, there are three different demand points or destinations which are basically wholesale market and denoted as demand point-1 (D-1), demand point-2 (D-2), demand point-3 (D-3), respectively. D-1 demands for fresh vegetables and fruit both, D-2’s demand is fish and D-3 wishes to get fruit.
Since the products are perishable, its transportation on time is important. So to minimize the time of transportation along with transportation cost is the main objective for the TPL. But the problem arises in the system when the source availability becomes unstable due to the reason of geographical condition, weather problems, man-made problems (unavailability of labor, communal strike etc.). In such a condition, parameters of the transportation problem become uncertain. Therefore, the decision maker needs to predefine these uncertain parameters using different uncertain tools. In this study, the uncertain parameters are defined using triangular type-2 fuzzy variables. The respective inputs are provided in Table 18.
Here decision has to be made in favor of making the transportation system stable in any crisis situation and for that it requires to define an appropriate amount of products to be stored in the sources so that system runs smoothly. From the practical point of view, it is very important to define such amount of storage because if the storage is more, then the products will be no longer fresh and its selling price will be down, which will produce an economic loss.
Fish is a product which requires a storage van for transportation, and therefore it needs a fixed cost to be considered except the transportation cost. But in case of vegetables and fruits, these two items do not require any kind of storage van if the delivery is done on time. Therefore, the respective fuzzy inputs for the numerical model are given as follows.
The inputs are fitted to the MODEL-II (Case-II) of this study. The model is a multi-objective model and its direct solution will not optimize both the objective functions at a time. Therefore, a compromise solution has to be obtained using multi-objective solution techniques. In this study, we have used the weighted sum method to find a compromise solution for the multi-objective model. The LINGO solver is used for coding and obtained the optimal solutions presented in Table 19 for the MODEL-II (Case-II). Inputs related to safety measure are taken from Table 8, as the study for both real-life-based numerical examples is same.
In Table 19, solution of the MODEL-II (Case-II) is presented where the type-2 fuzzy inputs are defined using the experts opinion and real-life data. The total cost is 690.54 $ for the transportation and total transportation time is 26.83 h. In Table 19, it can be observed that there are four allocations in the transportation system. As S-1 is the source for fish, so from S-1 only fish can be transported and hence only one allocation is done in Table 19 from S-1. As D-1 placed demands for fresh vegetables and fruit, we can see in Table 19 two allocations have made from S-2 and S-3. In this table, one can observe that there is one allocation from S-3 to D-3 as D-3 has demand for fruit only and S-3 provides the fruit. Another thing that can be observed in Table 19 is that the conveyance E-2 is used only for the transportation for fish and it requires fixed charge. But in case of vegetables and fruits, the used conveyance is E-1. These facts validate the model formulation and its application to real life.
8 Conclusion and future scope
In this paper, several useful ideas were presented to deal with a restricted fixed charge solid transportation problem in uncertain environment involving type-2 fuzzy parameters. The main contributions can be summarized through the following four aspects:
-
1.
Three different critical values (CVs) viz. optimistic CV, pessimistic CV and CV for regular fuzzy variable (RFV) as well as triangular fuzzy variable are presented, and the several properties of triangular RFV also are discussed. Also the generalized credibility measures of triangular type-2 fuzzy variable with different properties are presented.
-
2.
A new and efficient reduction method, i.e., the CV-based reduction method proposed by Qin et al. [30], is discussed and successfully applied to the proposed model to find the equivalent deterministic form.
-
3.
According to the literature survey, for the first time, a restricted fixed charge, safety-based solid transportation problem with type-2 fuzzy parameters has been developed and solved. With the use of CV-based reduction method, the proposed model is solved by establishing a chance constrained programming model based on generalized credibility and taking the credibility levels on the objective function as well as on the constraints.
-
4.
By introducing the concept of restriction on amount of transported goods, we have minimized the total transportation time satisfying the demand of all destinations.
The techniques and methodologies that used in this paper are easy to understand and general. We provide numerical experiments to show the easy application of the proposed methodology and solution technique. The methodologies proposed in this paper can be applied to the decision-making problems in different areas with type-2 fuzzy parameters. This process of decision making in which inputs are in imprecise/fuzzy in nature and the corresponding outputs are crisp/known will definitely help the DM to make the appropriate decisions when uncertainty exists in the data. Also the proposed model can be further extended to different types of solid transportation problem like as multi-stage multi-item solid transportation problem (STP) with type-2 fuzzy variable, STP in time varying network.
References
Hitchcock FL (1941) The distribution of a product from several sources to numerous localities. J Math Phys 20:224–230
Balinski ML (1961) Fixed-cost transportation problem. Naval Res Logist 8:41–54
Haley KB (1962) The solid transportation problem. Oper Res Int J 11:446–448
Kundu P, Kar S, Maiti M (2013) Multi-objective multi-item solid transportation problem in fuzzy environment. Appl Math Model 37:2028–2038
Liu ST (2006) Fuzzy total transportation cost measures for fuzzy solid transportation problem. Appl Math Comput 174:927–941
Ammar EE, Youness EA (2005) Study on multiobjective transportation problem with fuzzy numbers. Appl Math Comput 166:241–253
Bit AK, Biswal MP, Alam SS (1993) Fuzzy programming approach to multiobjective solid transportation problem. Fuzzy Sets Syst 57:183–194
Ojha A, Das B, Mondal S, Maiti M (2009) An entropy based solid transportation problem for general fuzzy costs and time with fuzzy equality. Math Comput Model 501(2):166–178
Kundu P, Kar S, Maiti M (2015) Multi-item solid transportation problems with type-2 fuzzy parameters. Appl Soft Comput 31:61–80
Mahapatra DR, Roy SK, Biswal MP (2013) Multi-choice stochastic transportation problem involving extreme value distribution. Appl Math Model 37(4):2230–2240
Baidya A, Bera UK, Maiti M (2013) Multi-item interval valued solid transportation problem with safety measure under fuzzy-stochastic environment. Int J Transp Secur 6(2):151–174
Baidya A, Bera UK, Maiti M (2014) Solution of multi-item interval valued solid transportation problem with safety measure using different methods. Opsearch 51(1):1–22
Adlakha V, Kowalski K (1999) On the fixed-charge transportation problem. OMEGA Int J Manag Scie 27:381–388
Adlakha V, Kowalski K, Vemuganti RR, Lev B (2007) More-for-less algorithm for fixed-charge transportation problems. OMEGA Int J Manag Sci 35:116–127
Xie F, Jia R (2012) Nonlinear fixed charge transportation problem by minimum cost flow-based genetic algorithm. Comput Ind Eng 63(4):763–778
Raj K, Rajendran C (2012) A genetic algorithm for solving the fixed-charge transportation model: two-stage problem. Comput Oper Res 39:2016–2032
Yang L, Liu L (2007) Fuzzy fixed charge solid transportation problem and algorithm. Appl Soft Comput 7(3):879–889
Yang L, Feng Y (2007) A bicriteria solid transportation problem with fixed charge under stochastic environment. Appl Math Model 31:2668–2683
Ojha A, Das B, Mondal S, Maiti M (2010) A solid transportation problem for an item with fixed charge, vehicle cost and price discounted varying charge using genetic algorithm. Appl Soft Comput 10:100–110
Kundu P, Kar S, Maiti M (2014) Fixed charge transportation problem with type-2 fuzzy variables. Inf Sci 255:170–186
Zadeh LA (1975) Concept of a linguistic variable and its application to approximate reasoning I. Inf Sci 8:199–249
Yager RR (1980) Fuzzy subsets of type-II in decisions. J Cybern 10(1–3):137–159
Coupland S, John RI (2007) Geometric type-1 and type-2 fuzzy logic systems. IEEE Trans Fuzzy Syst 15(1):3–15
Mendel JM (2001) Advances in type-2 fuzzy sets and systems. Inf Sci 177(1):84–110
Lv Z, Jin H, Yuan P (2009) The theory of triangle type-2 fuzzy sets. In: Proceedings of the 2009 IEEE international conference on computer and information technology, piscataway: IEEE Service Center, pp 57–62
Ling X, Zhang Y (2011) Operations on triangle type-2 fuzzy sets. Procedia Eng 15:3346–3350
Karnik NN, Mendel JM (2001) Centroid of a type-2 fuzzy set. Inf Sci 132:195–220
Greenfield S, John RI, Coupland S (2005) A novel sampling method for type-2 defuzzification. In: Proceedings of the UKCI 2005, London
Liu F (2008) An efficient centroid type-reduction strategy for general type-2 fuzzy logic system. Inf Sci 178:2224–2236
Qin R, Liu YK, Liu ZQ (2011) Methods of critical value reduction for type-2 fuzzy variable and their applications. J Comput Appl Math 235:1454–1481
Liu B, Iwamura K (1998) Chance constrained programming with fuzzy parameters. Fuzzy Sets Syst 94(2):227–237
Das A, Bera UK, Maiti M (2016) Defuzzification of trapezoidal type-2 fuzzy variables and its application to solid transportation problem. J Intell Fuzzy Syst 30(4):2431–2445
Mendel JM, John RIB (2002) Type-2 fuzzy sets made simple. IEEE Trans Fuzzy Syst 10(2):117–127
Liu ZQ, Liu YK (2010) Type-2 fuzzy variables and their arithmetic. Soft Comput 14:729–747
Yager RR (1981) A procedure for ordering fuzzy subsets of the unit interval. Inf Sci 24:143–161
Zeng L (2006) Expected value method for fuzzy multiple attribute decision making. Tsinghua Sci Technol 11:102–106
Liu B, Liu YK (2002) Expected value operator of fuzzy variable and fuzzy expected value models. IEEE Trans Fuzzy Syst 10(4):445–450
Sugeno M (1985) An introductory survey of fuzzy control. Inf Sci 36:59–83
Dalman H (2016) Uncertain programming model for multi-item solid transportation problem. Int J Mach Learn Cybern. https://doi.org/10.1007/s13042-016-0538-7
Chen L, Peng J, Zhang B (2017) Uncertain goal programming models for bicriteria solid transportation problem. Appl Soft Comput 51:49–59
Das A, Bera UK, Maiti M (2017) A profit maximizing solid transportation model under a rough interval approach. IEEE Trans Fuzzy Syst 25(3):485–498
Das A, Bera UK, Maiti M (2016) A breakable multi-item multi stage solid transportation problem under budget with Gaussian type-2 fuzzy parameters. Appl Intell 45(3):923–951
Acknowledgements
The authors would like to thank to the editor and the anonymous reviewers for their suggestions which have led to an improvement in both the quality and clarity of the paper. Dr. Bera acknowledges the financial assistance from Department of Science and Technology, New Delhi, under the Research Project (F.No. SR/S4/MS:761/12).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Details on type-2 fuzzy set
Appendix: Details on type-2 fuzzy set
A type-1 fuzzy set is a set whose elements have degrees of membership. In classical set theory, the membership of elements in a set is assessed in binary terms according to a bivalent condition—an element either belongs or does not belong to the set. By contrast, fuzzy set theory permits the gradual assessment of the membership of elements in a set; this is described with the aid of a MF valued in the real unit interval [0, 1]. In this whole paper the word “fuzzy” defines this fuzzy variable and denoted \( \tilde{A} \).
1.1 Type-2 fuzzy set (T2 FS)
Type-2 fuzzy set \( \tilde{A} \) defined on a universe of discourse \( X \), which is denoted as \( \tilde{A} \subseteq X, \) is a set of pairs \( \left\{ {x, \mu_{{\tilde{A}}} \left( x \right)} \right\}, \) where \( x \) an element of a fuzzy set is, and its grade of membership \( \mu_{{\tilde{A}}} \left( x \right) \) in the fuzzy set \( \tilde{A} \) is a type-1 fuzzy set defined in the interval \( J_{x} \subset \left[ {0, 1} \right], \) i.e., A T2 FS \( \tilde{A} \) defined by Mendel and John [33] is
where \( 0 \le \mu_{{\tilde{A}}} \left( {x,u} \right) \le 1 \) is the type-2 MF.
For numerical examples on type-2 fuzzy set readers are referred to Kundu et al. [20].
1.2 Regular fuzzy variable (RFV)
For a possibility space [34] (φ, p, Pos), a regular fuzzy variable \( \tilde{\xi } \) is defined as a measurable map from φ to [0, 1] in the sense that for every \( t \) ∈ [0, 1], one has \( \left\{ {\gamma \in \varphi | \tilde{\xi }\left( \gamma \right) \le t} \right\} \in p. \)
A discrete RFV is represented as \( \tilde{\xi }\sim\left( {\begin{array}{*{20}c} {r_{1} } & \ldots & {r_{n} } \\ {\mu_{1} } & \ldots & {\mu_{n} } \\ \end{array} } \right), \) where \( r_{i} \in \left[ {0, 1} \right] \,{\text{and }}\, \mu_{i} > 0, \forall i\, {\text{and}}\, {\text{max}}_{i } \left\{ {\mu_{i} } \right\} = 1 \).
If \( \tilde{\xi } = \left( {r_{1} , r_{2} , r_{3} } \right) \) with 0 ≤ \( r_{1} < r_{2} < r_{3} \le 1, \) then \( \tilde{\xi } \) is called a triangular RFV.
1.3 Critical values (CVs) for RFVs
Qin et al. [30] introduced three kinds of critical values (CVs). Let \( \tilde{\xi } \) be a RFV. Then:
-
1.
The optimistic CV of \( \tilde{\xi } \), denoted by CV*[\( \tilde{\xi } \)], is given by,
 (15)
(15) -
2.
The pessimistic CV of \( \tilde{\xi } \), denoted by \( CV_{*} \)[\( \tilde{\xi } \)], is given by,
 (16)
(16) -
3.
The CV of \( \tilde{\xi } \), denoted by CV[\( \tilde{\xi } \)], is given by
 (17)
(17)



Numerical examples of critical values are available in Kundu et al. [20].
1.4 The following theorems introduced the critical values (CVs) of trapezoidal and triangular RFVs
1.4.1 Theorem (Qin et al. [30])
Let \( \tilde{\xi } = \left( {r_{1} ,r_{2} , r_{3} ,r_{4} } \right) \) be a trapezoidal RFV. Then we have
-
1.
The optimistic CV of \( \tilde{\xi } \) is \( {\text{CV}}^{*} \left[ { \tilde{\xi }} \right] = r_{4} /\left( {1 + r_{4} - r_{3} } \right) \).
-
2.
The pessimistic CV of \( \tilde{\xi } \) is \( {\text{CV}}_{ *} \)\( \tilde{\xi } \) = \( r_{2} /\left( {1 + r_{2} - r_{1} } \right) \).
-
3.
The CV of \( \tilde{\xi } \) is
$$ {\text{CV}}\left[ { \tilde{\xi }} \right] = \left\{ {\begin{array}{*{20}l} {\frac{{ 2r_{2} - r_{1} }}{{1 + 2\left( {r_{2} - r_{1} } \right)}},} \hfill & {{\text{if}}\quad r_{2} > \frac{1}{2} } \hfill \\ {\frac{1}{2},} \hfill & { {\text{if}}\quad r_{2} \le \frac{1}{2} < r_{3} } \hfill \\ {\frac{{r_{4} }}{{\left( {1 + 2\left( {r_{4} - r_{3} } \right)} \right)}} } \hfill & {{\text{if}}\quad r_{3} \le \frac{1}{2}} \hfill \\ \end{array} } \right. $$
For numerical examples readers are referred to Qin et al. [30].
1.4.2 Theorem (Qin et al. [30])
Let \( \tilde{\xi } = \left( {r_{1} ,r_{2} , r_{3} } \right) \) be a triangular RFV. Then we have:
-
1.
The optimistic CV of \( \tilde{\xi } \) is \( {\text{CV}}^{*} \left[ { \tilde{\xi }} \right] = r_{3} /\left( {1 + r_{3} - r_{2} } \right) \).
-
2.
The pessimistic CV of \( \tilde{\xi } \) is \( {\text{CV}}_{ *} \left[ { \tilde{\xi }} \right] = r_{2} /\left( {1 + r_{2} - r_{1} } \right) \).
-
3.
The CV of \( \tilde{\xi } \) is
$$ {\text{CV}}\left[ { \tilde{\xi }} \right] = \left\{ {\begin{array}{*{20}l} {\frac{{ 2r_{2} - r_{1} }}{{1 + 2\left( {r_{2} - r_{1} } \right)}},} \hfill & {{\text{if}}\quad r_{2} > \frac{1}{2}} \hfill \\ {\frac{{ r_{3} }}{{1 + 2\left( {r_{3} - r_{2} } \right)}},} \hfill & {{\text{if}}\quad r_{2} \le \frac{1}{2}} \hfill \\ \end{array} } \right. $$
For numerical examples readers are referred to Qin et al. [30].
1.5 CV-based reduction method for type-2 fuzzy variable
In type-2 fuzzy set, the MF itself is a fuzzy set. So computation related to type-2 fuzzy is a very difficult job. To avoid this difficulty, some defuzzification methods and methodologies have been used for defuzzification of type-2 fuzzy variable. Since we cannot apply the methodologies that are related to type-1 fuzzy sets directly to the type-2 fuzzy sets, we reduce the type-2 fuzzy sets into type-1 fuzzy sets at first and then apply the methodologies. There are several researchers who have developed different methods to defuzzify a type-2 fuzzy sets. Recently Qin et al. [30] introduced a new method named as CV-based reduction method that reduces type-2 fuzzy variables into a type-1 fuzzy variable which may or may not be normal. This method is basically based to find out three critical values and these are optimistic CV denoted as \( {\text{CV}}^{*} \left[ { \tilde{\xi }} \right] \), pessimistic CV denoted as \( {\text{CV}}_{ *} \left[ { \tilde{\xi }} \right] \) and CV reduction denoted as \( {\text{CV}}\left[ { \tilde{\xi }} \right] \). Using these critical values we easily reduce a type-2 fuzzy variable into a type-1 fuzzy variable. The detail explanation of CV reduction method with an example is presented in Qin et al. [30].
1.5.1 Theorem (Qin et al. [30])
Let \( \tilde{\xi } = \left( {r_{1} , r_{2} , r_{3} ; \theta_{l} , \theta_{r} } \right) \) be a type-2 triangular fuzzy variables. Then we have:
-
1.
Using the optimistic CV reduction method, the reduction \( \xi_{1} \) of \( \tilde{\xi } \) has the following possibility distribution
$$ \mu_{{\tilde{\xi }_{1} }} \left( x \right) = \left\{ {\begin{array}{*{20}l} {\frac{{(1 + \theta_{r} )(x - r_{1} )}}{{r_{2} - r_{1} + \theta_{r} (x - r_{1} )}},} \hfill & {{\text{if}}\quad x \in \left[ { r_{1} ,\frac{{r_{1} + r_{2} }}{2} } \right]} \hfill \\ {\frac{{\left( {1 - \theta_{r} } \right)x + \theta_{r} r_{2} - r_{1} }}{{r_{2} - r_{1} + \theta_{r} \left( {r_{2} - r_{1} } \right)}},} \hfill & {{\text{if}}\quad x \in \left( { \frac{{r_{1} + r_{2} }}{2},r_{2} } \right]} \hfill \\ {\frac{{\left( { - 1 + \theta_{r} } \right)x - \theta_{r} r_{2} + r_{3} }}{{r_{3} - r_{2} + \theta_{r} \left( {x - r_{2} } \right)}},} \hfill & {{\text{if}}\quad x \in \left[ { r_{2} ,\frac{{r_{2} + r_{3} }}{2} } \right]} \hfill \\ {\frac{{\left( {1 + \theta_{r} } \right)( r_{3} - x)}}{{r_{3} - r_{2} + \theta_{r} \left( {r_{3} - x} \right)}},} \hfill & {{\text{if}}\quad x \in \left( { \frac{{r_{2} + r_{3} }}{2},r_{3} } \right]} \hfill \\ \end{array} } \right. $$ -
2.
Using the pessimistic CV reduction method, the reduction \( \xi_{2} \) of \( \tilde{\xi } \) has the following possibility distribution
$$ \mu_{{\xi_{2} }} \left( x \right) = \left\{ {\begin{array}{*{20}l} {\frac{{(x - r_{1} )}}{{r_{2} - r_{1} + \theta_{l} (x - r_{1} )}},} \hfill & {{\text{if}}\quad x \in \left[ { r_{1} ,\frac{{r_{1} + r_{2} }}{2} } \right]} \hfill \\ {\frac{{(x - r_{1} )}}{{r_{2} - r_{1} + \theta_{l} \left( {r_{2} - x} \right)}},} \hfill & {{\text{if}}\quad x \in \left( { \frac{{r_{1} + r_{2} }}{2},r_{2} } \right]} \hfill \\ {\frac{{(r_{3} - x)}}{{r_{3} - r_{2} + \theta_{l} \left( {x - r_{2} } \right)}},} \hfill & {{\text{if}}\quad x \in \left[ { r_{2} ,\frac{{r_{2} + r_{3} }}{2} } \right]} \hfill \\ {\frac{{( r_{3} - x)}}{{r_{3} - r_{2} + \theta_{l} \left( {r_{3} - x} \right)}},} \hfill & {{\text{if}}\quad x \in \left( { \frac{{r_{2} + r_{3} }}{2},r_{3} } \right]} \hfill \\ \end{array} } \right. $$
Using the CV reduction method, the reduction \( \xi_{3} \) of \( \tilde{\xi } \) has the following possibility distribution
It can be noted that type-1 fuzzy variable obtained by CV-based reduction methods is not always normalized. For such cases, we cannot use the usual credibility measure; here we have to use generalized credibility measure \( \widetilde{C}r \).
The following theorem finds the crisp equivalent forms of constraints involving type-2 triangular fuzzy variables, using generalized creditability measure for the reduced fuzzy variable from type-2 triangular fuzzy variable by CV reduction method.
1.5.2 Theorem (Qin et al. [30])
Suppose \( \xi_{i} \) be the reduction of type-2 fuzzy variable \( \tilde{\xi }_{i} = \left( {\tilde{r}_{1}^{i} ,\tilde{r}_{2}^{i} ,\tilde{r}_{3}^{i} ; \theta_{l, i} , \theta_{r, i} } \right) \) obtained by the CV reduction method for \( i = 1, 2, . . . , n \) and \( \xi_{1} , \xi_{2} , . . . . , \xi_{n} \) are mutually independent, and \( k_{i} \ge 0 \) for \( i = 1, 2, . . . , n \).
-
1.
Given the generalized credibility level \( \alpha \in \left( {0, 0.5} \right] \), if \( \alpha \in \left( {0, 0.25} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
$$ \mathop \sum \limits_{i = 1}^{n} \frac{{\left( {1 - 2\alpha + \left( {1 - 4\alpha } \right)\theta_{r, i} } \right)k_{i} r_{1}^{i} + 2\alpha k_{i} r_{2}^{i} }}{{1 + \left( {1 - 4\alpha } \right)\theta_{r, i} }} \le t, $$and if \( \alpha \in \left( {0.25, 0.5} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
$$ \mathop \sum \limits_{i = 1}^{n} \frac{{\left( {1 - 2\alpha } \right)k_{i} r_{1}^{i} + \left( {2\alpha + \left( {4\alpha - 1} \right)\theta_{l, i} } \right)k_{i} r_{2}^{i} }}{{1 + \left( {4\alpha - 1} \right)\theta_{l, i} }} \le t, $$ -
2.
Given the generalized credibility level \( \alpha \in \left( {0.5, 1} \right] \), if \( \alpha \in \left( {0.5, 0.75} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
$$ \mathop \sum \limits_{i = 1}^{n} \frac{{\left( {2\alpha - 1} \right)k_{i} r_{3}^{i} + \left( {2\left( {1 - \alpha } \right) + \left( {3 - 4\alpha } \right)\theta_{l, i} } \right)k_{i} r_{2}^{i} }}{{1 + \left( {3 - 4\alpha } \right)\theta_{l, i} }} \le t, $$and if \( \alpha \in \left( {0.75, 1} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
$$ \mathop \sum \limits_{i = 1}^{n} \frac{{\left( {2\alpha - 1 + \left( {4\alpha - 3} \right)\theta_{r, i} } \right)k_{i} r_{3}^{i} + 2\left( {1 - \alpha } \right)k_{i} r_{2}^{i} }}{{1 + \left( {4\alpha - 3} \right)\theta_{r, i} }} \le t. $$
1.5.2.1 Corollary
With the help of the above theorem, we can also find an equivalent expression for \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) as follows:
As we know,
where \( \xi_{i}^{\prime } = - \xi_{i} \) is the reduction of \( - \, \tilde{\xi }_{i} = \left( { - \,\tilde{r}_{1}^{i} , - \,\tilde{r}_{2}^{i} , - \,\tilde{r}_{3}^{i} ; \theta_{r, i} , \theta_{l, i} } \right) \) and \( - \,t = t^{\prime } \).
Now using [21] of the theorem (“Regular fuzzy variable (RFV)” section in Appendix ), given the generalized credibility level \( \alpha \in \left( {0, 0.5} \right] \), if \( \alpha \in \left( {0, 0.25} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
which implies
and if \( \alpha \in \left( {0.25, 0.5} \right] \), then \( \widetilde{C}r\left\{ {\sum\nolimits_{i = 1}^{n} {k_{i} \xi_{i} \le t} } \right\} \ge \alpha \) is equivalent to
which implies
For different values of \( \alpha \), the similar equivalent expression can be obtained.
1.6 Defuzzification of a type-2 fuzzy variable by CV-based reduction method
The defuzzification process of a type-2 fuzzy variable has two stages. In the first stage, the type-2 fuzzy variable is reduced to its corresponding type-1 fuzzy variable and in the second stage the crisp value is obtained by applying different defuzzification methods like as centroid method [35], expected value method [36, 37] to the reduced fuzzy variables. In this paper, we first apply the CV-based reduction method to the type-2 fuzzy variables, so that we get type-reduced form, i.e., a type-1 fuzzy variable and then we apply the centroid method to the type-1 fuzzy variables, resulting a crisp value.
1.6.1 Centroid defuzzification technique
The centroid method is also known as center of gravity or center of area defuzzification. It was first proposed by Sugeno [38] in 1985. It is the most commonly used method and is more accurate compared to other existing methods. The method can be expressed as
where \( \xi = (\xi_{1} , \xi_{2} , \ldots , \xi_{n} ) \) is a fuzzy variable, \( x^{*} \) is the corresponding crisp value to be obtained, \( \mu_{\xi } \left( {x_{i} } \right) \) is the aggregated MF, and x is the output variable.
Numerical examples of crisp conversion of TRS using the centroid method are available in Kundu et al. [20].
Here it should be mentioned that the \( {\text{CV}} \)-based reduction method gives the more centroid compromised crisp value, compared to the optimistic \( {\text{CV}}^{*} \) and pessimistic \( {\text{CV}}_{*} \) as these values are evaluated using the possibility and necessity measures, respectively, whereas the \( {\text{CV}} \) reduction method is based on the average of these two measures.
The entire defuzzification process of a type-2 fuzzy set is depicted in Fig. 4.

Defuzzification process of a type-2 fuzzy variable
Rights and permissions
About this article

Cite this article
Das, A., Bera, U.K. & Maiti, M. A solid transportation problem in uncertain environment involving type-2 fuzzy variable. Neural Comput & Applic 31, 4903–4927 (2019). https://doi.org/10.1007/s00521-018-03988-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-018-03988-8