
Abstract
Our work aims to investigate new solutions for the (3 + 1)-dimensional Extended Date–Jimbo–Kashiwara–Miwa Equation which characterize the physical phenomena owing to the inhomogeneities of media. By using the Hirota—method with the aid of a quadratic test function, we derived a new Lump—soliton solution that localized in all directions in space and time. A class of 1-soliton solution and more-soliton solution are explored using the improved tanh–coth method and the improved tan–cot method. The sequel in these solutions demonstrate a valuation of physical phenomenon. Two, three-dimensional, contour and density plots are presented to illustrate the behaviors of the solitons.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The integrable, nonlinear and higher-order differential equations represent many phenomena in the real world as Nanocarbon field, fluids, water propagation, Geology and earthquakes science, image processing, etc. (Sun 2018; Ramzan 2020; Malischewsky 2011). Here, we focus on a new integrable and highly nonlinear partial differential equation that is known as the integrable (3 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa (DJKM) equation with variable coefficients which has the form;
which characterize the real physical phenomena for the inhomogeneous of media, \(u\left( {x,y,z,t} \right)\) is the amplitude of the wave and \(\alpha ,\beta ,a,b,c\) are arbitrary constants \(h\left( t \right)\) is a smooth function, \(k\left( t \right)\) is a function of t.
For \(h\left( t \right)\) = 1,\(k\left( t \right) = 1\), Eq. (1) minimize to (3 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa.
equation with constant coefficients
Equation (2) integrable in the Painlev´e analysis and allowed multiple soliton solutions consisting of solitonic, singular, periodic solutions. When \(h\left( t \right) = 1, k\left( t \right) = 0\), Eq. (1) reduces to the (2 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa (DJKM) equation.
which describes the propagation of nonlinear dispersive waves in inhomogeneous media, where \(\alpha\) and \(\beta\) are real constants.
This equation at \(\alpha = - 1 \;{\text{and}}\; \beta = 1\) can be written as the bilinear Hirota form as:
where \({\mathcal{D}}_{x} ,\) \({\mathcal{D}}_{y}\), \({\mathcal{D}}_{t}\) are the Hirota’s bilinear operators.
with the customary definition of Hirota’s bilinear operators (Hirota 2004; Cheng and Zhang 2017; Xu 2019; Kang and Xia 2020).
where the D-operators’ properties
Equation (1) consider the extension of the Kadomtsev–Petviashvili (KP) hierarchy (Chauhan et al. 2020; Rizvi et al. 2020a).
Many studies are applied to Eq. (1) and generated many types of solutions. Ismael et al. (2020) applied the Hirota method to explore the class of lump-typed solutions that are analytical solutions localized in all directions in space and also studied the collision phenomenon between the lump-typed solutions and other soliton solutions. Chauhan et al. (2020) used the fourth prolongation theory to generate the Lie infinitesimals for Eq. (1) and investigated some soliton solution for it. Using the bilinear Bäcklund transformation with aid of some quadratic functions, Cheng et al. (2019) explored exact solutions in the form of Lump and interacted solutions for Eq. (1). In the three dimensions and the variable coefficients, Kang and Xia (2020) generated double-solitary wave solution and rogue wave solution. Other methods (Guo and Lin 2019; Yuan 2017; Wazwaz 2020a, b; Kang and Xia 2020; Adem et al. 2019; Singh and Gupta 2018) were applied to explore more solutions for Eq. (1). Here, we studied this model using various methods and investigated new and multi different solutions as in the following sections.
2 Lump soliton solutions for Eq. (2)
We apply the Hirota Billinear Method (HBM) (Hirota 2004; Cheng and Zhang 2017; Xu 2019; Kang and Xia 2020; Ma et al. 2018) to explore soliton and Lump soliton solutions for Eq. (2). According to our observation, the resulted solutions predicate on the characteristics and physical significance of the problem. The Hirota method is effective in generating many types of soliton solutions (Sadat et al. 2018; Yang et al. 2018; Yong 2018; Li et al. 2019; Zhou et al. 2019; Zhang and Xia 2020). The interaction solutions have been studied in many nonlinear evolution equations (Ma et al. 2020; Ali and Hadhoud 2019; Ali et al. 2020; Ali and Ma 2019; Mohamed 2019; M 2015; Yu and Sun 2017; Rizvi et al. 2020b; Khater et al. 2020; Aliyu 2020). In this section, we investigate some of the lump soliton solutions and travelling wave solutions in which the medium moves in the direction of propagation of the wave, their dynamics using the Hirota method for (2). By using the singular manifold method (SMM) with two terms truncated series to derive the same ansatz in (Wazwaz 2020b);
where \(\phi \left( {x,y,t,z} \right)\) is a test function and will be assumed later, substitute (5) into (2) generate highly nonlinear PDE;
To generate a single lump-typed solution, we suppose that the test function in the form;
where \(\lambda_{i} , i = 1, \ldots ,11\), are real unknown that will be determined later. A direct substitution from (7) into (6) and gather the coefficients of polynomials in \(x,y,t\) and z. We obtain a nonlinear algebraic system in \(\lambda_{i}\), by solving those equations with aid of Maple, we acquire some sets of solutions as follows;
3 Case I
4 Case II
where \(\lambda_{1} \ne 0, \lambda_{7} \ne 0\).
5 Case III
where \(\lambda_{6} \ne 0, \lambda_{2} \ne 0\).
By substituting a result with Eqs. (7)–(9) into (5), the solution of (2) has the form;
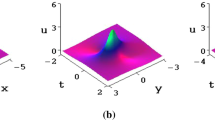
By selecting Case I to present three-dimensional plots for the obtained results and depicted in Fig. 1. The 3-dimensional figures are attracted to comprehend the physical phenomena for the acquired solutions.


Plots of Lump soliton solutions for Eq. (9) with specific values;\(\lambda_{1} = 1,\lambda_{5} = \lambda_{3} = \lambda_{7} = \lambda_{10} = 1,\lambda_{8} = \lambda_{2} = - 1,\;\alpha = 2,\beta = 1, a = b = c = 1\) and \(z = 0,\) \(t = 0, 1\) and 6 respectively, a–c 3D plots for Eq. (11) d-f Contour plot of (a–c), g–i the density plots, j represent a curve solutions at \(y = 0, y = 1\) and \(y = 2\)
6 More soliton solutions
In this section, we apply some trigonometric and hyperbolic functions as an ansatz to generate new solutions for the (3 + 1) dimensional (EDJKM) (Liu et al. 2020; Kang and Xia 2020; Wazwaz 2020c; Guo et al. 2015). Assume the solution of Eq. (2) in the form;
where \(d_{i} ,\left( { i = 1, \ldots ,n + 1} \right)\) are constants which will be determined later, n belongs to the set of integers which is determined by equaling the highest order derivatives and nonlinear terms in Eq. (2) together and the function \(\phi \left( {kx + ry + sz - wt} \right)\) satisfies the assumed trigonometric and hyperbolic functions and this will be shown in the literature;
6.1 Three-solitary solution
In this portion, to find the three-solitary wave solution of Eq. (3), we suppose
where a1, a2 \(\kappa_{1} ,\kappa_{2} ,p_{1} ,p_{2} ,b_{1} ,b_{2} ,c_{1} ,c_{2}\) are arbitrary parameters.
Using Eq. (13), we get the following three-solitary solution of Eq. (2).
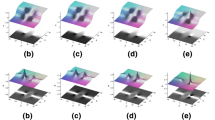
we suppose the figures of the three-solitary solution (14) u are demonstrated in Fig. 2. The drive of the solutions is shown. Figure 2. demonstrates that the interfere between waves at \(p_{1} = 1; a_{1} = 1; b_{1} = 1;k_{2} = 2; c_{1} = p_{2} = 1; a_{2} = k_{2} = 2; c_{2} = 2;\)

The three -solitary solution by the specification of a \(x = 0, y = 10,\) b with \(x = 0, y = 0\), and c with \(x = 0, y = 10.\)
6.2 The improved tanh–coth method
To determine the parameter n, according to the following formulas for the highest exponents of the function u and its derivatives: \(u^{n} \left( \zeta \right) \to n u, u^{\prime} \to n + 1, u^{\left( k \right)} \to n + k\).
Through investigation Eq. (2), we get the value of n as, \(n + 5 = n + 2 + n + 2 \Rightarrow n = 1\). Equation (12) rewrite as;
where \(d_{0} ,d_{1} ,d_{2} ,k, r, s\) and w are arbitrary constants and will be obtained later. Substitute Eq. (15) into Eq. (2) and collect the coefficients of \(\left( {{\text{tanh}}\left( {kx + ry + sz - wt} \right)} \right)^{j}\) where, \(j = 0, 2, 4, 6, - 2, - 4\) and − 6. Equaling these coefficients to zero, generating an algebraic system in \(d_{0} ,d_{1} ,d_{2} ,k, r, s\) and w as follows.
By solving this system, we obtain the unknown constants that assumed in Eq. (15);
Substitute Eq. (15) into Eq. (13), we get new solution for Eq. (2);
Tanh Coth method demonstrated many hyperbolic functions characterized the Soliton solutions for different cases. For different values of time, we plotted the result (18) in Fig. 3.

Three dimensional plots for result in (14) with \(d_{0} = 1,a = b = c = k = s = r = z = 1,\alpha = 2\) and \(\beta = 1,\) (a) t = 0, (b) t = 1.5
6.3 The improved tan–cot method
Application of the tanh–coth method may also lead to tanh–coth (or tan–cot) solutions that are not disguised versions of coth (or cot) solutions. Assume that;
Following the same steps in the previous section, we get the constants as;
Back substation to the original variables;
This solution is plotted for different values of time in Fig. 3.
7 Results and discussion
Three-and two-dimensional simulations are presented to illustrate our results. Through our observation, we notice that;
-
Figure 1a–c represents Lump-soliton solutions for Eq. (2) that localized in space and time.
-
Figure 3a, b illustrates one soliton solution for Eq. (2) that with increasing the time, the amplitude decreasing and moves towards the right.
-
The obtained solution in Fig. 4a, b represents three soliton solutions for Eq. (2). The behavior of the solitons depends on the variety between the spatial coordinates and the time.
Fig. 4 
Three dimensional plots for result in (21) with \(d_{0} = 1,a = b = c = k = s = r = z = 1,\alpha = 2\) and \(\beta = 1,\) a t = 0, b t = 2

8 Conclusions
In this paper, we explore diverse types of solutions for the (3 + 1)-dimensional (EDJKM) equation through many methods. Applying the Hirota- bilinear method, generate new Lump soliton solutions for Eq. (2) that localized in all directions and Using various ansatzes to explore new multi-soliton solutions for Eq. (2) by the Cole–Hopf transformation. Some of these solutions have solitary wave shapes. By using the 3D plot, we can draw the solutions.
Based on the Hirota bilinear method we can get the three-solitary solution. We find that our results are new Comparing with the published papers (Xu 2019; Kang and Xia 2020). We demonstrate the multiple soliton solutions which form a solitonic, periodic and singular solutions. We can also try to find their multiple interaction solutions. we demonstrated the kinds of solutions, such as solitary solutions and singular solitary solutions. More soliton solutions are presented. the velocity for a lump-typed solution is studied. The Tan–Cot method specified many solutions depending on the parameter n, so many Soliton solutions are demonstrated and illustrated by figures. The three-dimensional figures are demonstrated to show the physical phenomena for the obtained solutions. By using Maple calculation, we can solve the resulted system of equations and obtain the exact solutions for the (3 + 1)-dimensional VC-DJKM equation. we can extend Eq. (2) into a generalized variable-coefficient equation and obtain its novel solutions by the generalized bilinear operator. It is demonstrated that our calculations are useful to study the higher-dimensional nonlinear partial differential equations in mathematical physics.
References
Adem, A.R., Yildirim, Y., Yaşar, E.: Complexiton solutions and soliton solutions: (2+1) (2+1)-dimensional Date–Jimbo–Kashiwara–Miwa equation. Pramana 92(3), 36 (2019). https://doi.org/10.1007/s12043-018-1707-x
Ali, M.R.: A truncation method for solving the time-fractional Benjamin-Ono equation. J. Appl. Math. 18, 1–7 (2019)
Ali, M.R., Hadhoud, A.R.: Hybrid Orthonormal Bernstein and Block-Pulse functions wavelet scheme for solving the 2D Bratu problem. Results Phys. 12, 525–530 (2019)
Ali, M.R., Ma, W.-X.: Detection of a new multi-wave solutions in an unbounded domain. Mod. Phys. Lett. B 33(34), 1950425 (2019)
Ali, M.R., Hadhoud, A.R., Ma, W.-X.: Evolutionary numerical approach for solving nonlinear singular periodic boundary value problems. J. Intell. Fuzzy Syst. pp. 7723–7731 (2020)
Aliyu, A.I., Li, Y., Qi, L., Inc, M., Baleanu, D., Alshomrani, A.S.: Lump-type and bell-shaped soliton solutions of the time-dependent coefficient Kadomtsev-Petviashvili equation. Front. Phys. 7, 242 (2020)
Chauhan, A., Sharma, K., Arora, R.: Lie symmetry analysis, optimal system, and generalized group invariant solutions of the (2 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa equation. Math. Methods Appl. Sci. 43(15), 8823–8840 (2020)
Cheng, L., Zhang, Y.: Lump-type solutions for the (4 + 1)-dimensional Fokas equation via symbolic computations. Mod. Phys. Lett. B 31(25), 1750224 (2017)
Cheng, L., Zhang, Y., Lin, M.-J.: Lax pair and lump solutions for the (2+ 1)-dimensional DJKM equation associated with bilinear Bäcklund transformations. Anal. Math. Phys. 9(4), 1741–1752 (2019)
Guo, F., Lin, J.: Interaction solutions between lump and stripe soliton to the (2 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa equation. Nonlinear Dyn. 96(2), 1233–1241 (2019)
Guo, S.M., Mei, L.Q., Zhou, Y.B.: The compound (GG) expansion method and double nontraveling wave solutions of (2+1)-dimensional nonlinear partial di_erential equations. Comput. Math. Appl. 69, 804–816 (2015)
Hirota, R.: The direct method in soliton theory, vol. 155. Cambridge University Press, Cambridge (2004)
Ismael, H.F., et al.: M-Lump, N-soliton solutions, and the collision phenomena for the (2 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa equation. Results Phys. 19, 103329 (2020)
Kang, Z.-Z., Xia, T.-C.: Construction of abundant solutions of the (2+1)-dimensional time-dependent Date–Jimbo–Kashiwara–Miwa equation. Appl. Math. Lett. 103, 106163 (2020)
Khater, M.M.A., Baleanu, D., Mohamed, M.S.: Multiple Lump novel and accurate analytical and numerical solutions of the three-dimensional potential Yu–Toda–Sasa–Fukuyama equation. Symmetry 12, 2081 (2020). https://doi.org/10.3390/sym12122081
Li, Q., Chaolu, T., Wang, Y.-H.: Lump-type solutions and lump solutions for the (2 + 1)-dimensional generalized Bogoyavlensky-Konopelchenko equation. Comput. Math. Appl. 77(8), 2077–2085 (2019)
Liu, J.-G., Osman, M.S., Zhu, W.-H., Zhou, Li., Baleanu, D.: The general bilinear techniques for studying the propagation of mixed-type periodic and lump-type solutions in a homogenous-dispersive medium. AIP Adv. 10, 105325 (2020). https://doi.org/10.1063/5.0019219
Ma, W.-X.: Lump solutions to the Kadomtsev–Petviashvili equation. Phys. Lett. A 379(36), 1975–1978 (2015)
Ma, W.-X., Ali, M.R., Sadat, R.: Analytical solutions for nonlinear dispersive physical model. Complexity, vol. 2020, Article (2020)
Ma, Z., Chen, J., Fei, J.: Lump and line soliton pairs to a (2+1)-dimensional integrable Kadomtsev-Petviashvili equation. Comput. Math. Appl. 76(5), 1130–1138 (2018)
Malischewsky, P.G.: Seismic waves and surface waves: past and present. Geofísica Int. 50(4), 485–493 (2011)
Ramzan, M., Riasat, S., Kadry, S., Kuntha, P., Nam, Y., Howari, F.: Numerical analysis of carbon nanotube-based nanofluid unsteady flow amid two rotating disks with hall current coatings and homogeneous-heterogeneous reactions. Coatings 10, 48 (2020). https://doi.org/10.3390/coatings10010048
Rizvi, S.T.R., Seadawy, A.R., Ashraf, F., Younis, M., Iqbal, H., Baleanu, D.: Lump and Interaction solutions of a geophysical Korteweg–de Vries equation. Results Phys. 19, 103661 (2020). https://doi.org/10.1016/j.rinp.2020.103661
Rizvi, S.T.R., Younis, M., Baleanu, D., Iqbal, H.: Lump and rogue wave solutions for the Broer–Kaup–Kupershmidt system. Chin. J. Phys. 68, 19–27 (2020). https://doi.org/10.1016/j.cjph.2020.09.004
Sadat, R., Kassem, M., Ma, W.-X.: Abundant Lump-Type Solutions and Interaction Solutions for a Nonlinear (3. Advances in Mathematical Physics, 2018). (2018)
Singh, M., Gupta, R.K.: On painlevé analysis, symmetry group and conservation laws of Date–Jimbo–Kashiwara–Miwa equation. Int. J. Appl. Comput. Math. 4(3), 1–15 (2018). https://doi.org/10.1007/s40819-018-0521-y
Sun, H., et al.: A New Collection of Real World Applications of Fractional Calculus in Science and Engineering. Communications in Nonlinear Science and Numerical Simulation (2018)
Wazwaz, A.M.: A (2+1)-dimensional time-dependent Date–Jimbo–Kashiwara–Miwa equation: painleve integrability and multiple soliton solutions. Comput. Math. Appl. 79, 1145–1149 (2020)
Wazwaz, A.-M.: A (2 + 1)-dimensional time-dependent Date–Jimbo–Kashiwara–Miwa equation: painlevé integrability and multiple soliton solutions. Comput. Math. Appl. 79(4), 1145–1149 (2020)
Wazwaz, A.-M.: New (3 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa equations with constant and time-dependent coefficients: Painlevé integrability. Phys. Lett. A 384(32), 126787 (2020)
Xu, Q.G.: Painlevé analysis, lump-kink solutions and local-ized excitation solutions for the (3 + 1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Appl. Math. Lett. 97, 81 (2019)
Yang, J.-Y., Ma, W.-X., Qin, Z.: Lump and lump-soliton solutions to the (2+1) (2+1)-dimensional Ito equation. Anal. Math. Phys. 8(3), 427–436 (2018)
Yong, X., et al.: Lump solutions to the Kadomtsev-Petviashvili I equation with a self-consistent source. Comput. Math. Appl. 75(9), 3414–3419 (2018)
Yu, J.P., Sun, Y.L.: Lump solutions to dimensionally reduced Kadomtsev–Petviashvili-like equations. Nonlinear Dyn 87, 1405–1412 (2017)
Yuan, Y.-Q., et al.: Wronskian and Grammian solutions for a (2 + 1)-dimensional Date–Jimbo–Kashiwara–Miwa equation. Comput. Math. Appl. 74(4), 873–879 (2017)
Zhang, W.-J., Xia, T.-C.: Solitary wave, M-lump and localized interaction solutions to the (4+1)-dimensional Fokas equation. Phys. Scr. 95(4), 045217 (2020)
Zhou, Y., Manukure, S., Ma, W.-X.: Lump and lump-soliton solutions to the Hirota–Satsuma–Ito equation. Commun. Nonlinear Sci. Numer. Simul. 68, 56–62 (2019)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ali, M.R., Sadat, R. Construction of Lump and optical solitons solutions for (3 + 1) model for the propagation of nonlinear dispersive waves in inhomogeneous media. Opt Quant Electron 53, 279 (2021). https://doi.org/10.1007/s11082-021-02916-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-021-02916-w