
Abstract
In this paper, we are concerned with the explicit analytic solutions for the focusing and defocusing space shifted nonlocal nonlinear Schrödinger (NLS) equation introduced by Ablowitz and Musskimani (Phys Lett A 409:127516, 2021). The nonsingular N-soliton solutions of the defocusing space shifted nonlocal NLS equation are obtained, while the multi-rogue wave solutions are constructed for focusing space shifted nonlocal NLS equation by Darboux transformation. The asymptotic analysis of the soliton solutions is investigated theoretically and numerically. The dynamic features of first-, second-order RW solutions are analysed explicitly. It shows that the space shift \(x_0\) reveals more general dynamic behaviors in the space shifted nonlocal NLS equation.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The integrable NLS equation along with its higher-order ones has numerous applications, such as nonlinear optics, Bose–Einstein condensates, biophysics and water waves [1,2,3,4,5]. It is solvable based on the inverse scattering transform, DT and Hirota bilinear method [6,7,8,9,10,11]. The nonlocal NLS equation has been proposed by Ablowitz and Musslimimain [12]
which is non-Hermitian and \(PT \)-symmetric, q(x, t) is a complex-valued function of real variables x, t, and can become the local NLS equation under the variable transformations \(x\rightarrow ix,t\rightarrow -t\). Here \(\sigma =\pm 1\) denotes the focusing NLS equation or defocusing NLS equation, respectively. The soliton solutions and RW solutions have been obtained by DT in determinant form for the two cases [13, 14]. Gauge equivalent structure of Eq. (1) has been studied in [15, 16]. For the past few years, a series of nonlocal integrable nonlinear equations have been studied, which includes the \(PT \)-symmetric nonlocal NLS equation [17,18,19], reverse space–time complex modified Korteweg–de Vries (mKdV) equation [20,21,22,23], reverse space–time nonlocal Sasa–Satsuma equation [24, 25] and \(PT \)-symmetric Davey–Stewartson equation [26,27,28,29]. Integrable discrete version of the nonlocal NLS equation is also discussed [30]. In recent months, Ablowitz and Musslimimain have introduced a series of new integrable space–time shifted nonlocal nonlinear equations in [31], which contain the space shifted nonlocal NLS equation, time shifted nonlocal NLS equation and space–time shifted nonlocal NLS equation as well as the real and complex space–time shifted nonlocal mKdV equation. The one of the space shifted nonlocal NLS equations reads
where \(x_{0}\) is an arbitrary real parameter. The Lax pair and the infinite number of conserved quantities have been given, which indicates that Eq. (2) is integrable. The exact one-soliton solution is obtained via the inverse scattering transform in Ref. [19]. Soon after, the periodic wave solution and one-, two-soliton solutions of the shifted nonlocal NLS and mKdV equations are obtained by using the Hirota bilinear method [32]. On the variable transformation scale, one cannot get the local NLS equation from the space shifted nonlocal NLS equation, which is different from the nonlocal NLS equation [33]. Therefore, we consider the focusing and defocusing nonlocal space shifted NLS equation. Our main attention focuses on the space shifted coefficient \(x_{0}\), which can cause the spatial displacement of the wave propagation of solitons and RWs.
The paper is organized as follows. In Sect. 2, we derive the nonsingular N-soliton solutions and the dynamic behavior of two-soliton solutions are analyzed for the defocusing space shifted nonlocal NLS equation. In Sect. 3, using the known DT, we construct the higher-order RW solutions for focusing space shifted nonlocal NLS equation. The first-, second-order RWs are studied by the analysis of the space shifted factor \(x_{0}\). The conclusion is summarized in the last section.
2 Soliton solutions for defocusing nonlocal space shifted NLS Eq. (2)
In this section, we construct the exact solutions of the defocusing space shifted nonlocal NLS Eq. (2) on nonzero seed solution via DT. The dynamic behavior of the solitons with respect to the space shift \(x_{0}\) is also investigated.
The Lax pair of Eq. (2) is
with
where \(\Phi =(\phi _{1},\phi _{2})^{T}\) is the vector eigenfunction and z is the spectral parameter. One can check that the space shifted nonlocal NLS equation can derive from the compatibility condition \(U_{t}-V_{x}+[U,V]=0\).
Following the method of constructing the DT for nonlocal NLS equation in [13], we directly give the Nth iterated potential transformations
with
where \(M=N-1\), N, or \(N+1\), the block matrices \(F_{N\times M},G_{N\times (2N-M)}, G^{*}_{N\times M},F^{*}_{N\times (2N-M)}\) are defined as below
To obtain the exact solutions, we start from the plane-wave solution \(q=c e^{2ic^{2}t}\) with \(\sigma =-1\), where c is a real parameter, and solve the system (3a) and (3b). Then we get the eigenfunctions
with \(s_{k}=\sqrt{z^2+c^2}\) and \(\xi _{k}=x-2iz_{k}t\), where \(a_{k}\) and \(b_{k}(1\ll k \ll N)\) are complex parameters. Taking the above eigenfunction into the Nth iterated solution (4a) and (4b), we can get the exact solutions of the defocusing space shifted nonlocal NLS equation (2). Here we stress that the conjugate eigenfunction in (5) is essentially connected with the space shifted parameter \(x_{0}\) in symmetric forms, e.g., \((f_{k}^{*}(x_{0}-x,t),g_{k}^{*}(x_{0}-x,t))\). In order to seek the soliton solutions, we impose \(s_{k}\) to be real numbers, \(z_{k}\) pure imaginary and \(0<|\mathrm Im(z_{k})|<c\), which results in the existence of the \(\xi _{k}\)-solitary wave.
When \(N=1\), the solution (4a) is reduced to
where \(\xi _{1}=x+2z_\mathrm{1I}t,\eta _{1}=x-2z_\mathrm{1I}t, \mu _{1}=z_\mathrm{1I}-is_{1},s_{1}=\sqrt{c^{2}-z_\mathrm{1I}^{2}},\gamma _{1}=a_{1}/b_{1}\) and \(z_{1}=z_\mathrm{1R} +iz_\mathrm{1I}\). The singularity problem can be avoid with the constraint condition \(\mathrm sgn(z_\mathrm{1I})\mathrm Re(\mu _{1}\gamma _{1})>0\) or \(\mathrm Im(\mu _{1}\gamma _{1}) \ne 0\). Under the nonsingular conditions, the exact solution (7) contains two waves, i.e., \(\xi _{1}\)-wave and \(\eta _{1}\)-wave. Let us consider the asymptotic analysis for the soliton solution (7).
(i) Along the line \(x+2z_\mathrm{1I}t=0\) as \(|t|\rightarrow \infty \), we have
where \(\zeta _{1}^{-}=z_{1\mathrm{I}},\vartheta _{1}^{-}=\mu _{1}\gamma _{1}, \zeta _{1}^{+}=\mu _{1}^{*},\vartheta _{1}^{+}=z_\mathrm{1I}\gamma _{1}, \Lambda _{1}^{-}=\ln \frac{|z_\mathrm{1I}|}{c|\gamma _{1}|}, \Lambda _{1}^{+}=\ln \frac{c}{|z_\mathrm{1I}||\gamma _{1}|}\). The minus sign corresponds to \(z_\mathrm{1I}>0\) as \(t\rightarrow -\infty \) or \(z_\mathrm{1I}<0\) as \(t\rightarrow \infty \) and the plus sign to \(z_\mathrm{1I}<0\) as \(t\rightarrow -\infty \) or \(z_\mathrm{1I}>0\) as \(t\rightarrow \infty \).
(ii) Along the line \(x-2z_\mathrm{1I}t=0\) as \(|t|\rightarrow \infty \), we have
where \(\eta _{1}^{-}=\mu _{1}z_\mathrm{1I},\varphi _{1}^{-}=c^2\gamma _{1}^{*}, \eta _{1}^{+}=c^2,\varphi _{1}^{+}=\mu _{1}^{*}z_\mathrm{1I}\gamma _{1}^{*}\). The minus sign corresponds to \(z_\mathrm{1I}>0\) as \(t\rightarrow -\infty \) or \(z_\mathrm{1I}<0\) as \(t\rightarrow \infty \) and the plus sign to \(z_\mathrm{1I}<0\) as \(t\rightarrow -\infty \) or \(z_\mathrm{1I}>0\) as \(t\rightarrow \infty \).
From the above expression, we can deduce that Eq. (8a) represents the dark soliton for \(\mathrm z_\mathrm{1I}\gamma _\mathrm{1I}>0\) or antidark soliton for \(\mathrm z_\mathrm{1I}\gamma _\mathrm{1I}<0\), while Eq. (9a) represents the dark soliton for \(\mathrm z_\mathrm{1I}\mathrm Im(\mu _{1}^2\gamma _{1})<0\) or antidark soliton for \(\mathrm z_\mathrm{1I}\mathrm Im(\mu _{1}^2\gamma _{1})>0\) under the nonsingular constraints. Asymptotic analysis expressions (8b) and (9b) reveal that the velocities and amplitudes of two solitons maintain unchanged before and after collisions but a phase shift \(|\Lambda _{1}^{+}-\Lambda _{1}^{-}|=2\ln \frac{c}{|z_\mathrm{1I}||\gamma _{1}|}\).

Next, we exhibit several typical solitons with specific parameter values \(z_{1},\mu _{1}\) and \(\gamma _{1}\). Figure 1 shows the elastic interactions of exact two-soliton solutions (7) with three profiles: two antidark soliton, dark and antidark soliton and two dark soliton. However, for the case \(\gamma _\mathrm{1I}=0\) or \(\mathrm Im(\mu _{1}^2\gamma _{1})=0\), the two solitons degrade into a single soliton, which is not a trivial single soliton as the existence of phase shift (see Fig. 2). In Fig. 3, contour plots of the soliton solution (7) are displayed with the different space shifts. We see that the space shift \(x_{0}\) only has the effect of translation on the \(q_{2}\) soliton.

Degenerate two-soliton interactions a dark soliton with \(c=2,z_{1}=\gamma _{1}=1,x_0=1\) and b antidark soliton with \(c=2,z_{1}=1,\gamma _{1}=1-\sqrt{3}i,x_0=-1\)

Contour plots of the soliton solution (7) with \(c=1,z_{1}=\frac{i}{7},\gamma _{1}=\frac{1}{4}-\frac{i}{2}\) at \(x_0=-3,0,3\) from left to right, respectively
3 Rogue wave solutions of focusing space shifted nonlocal NLS Eq. (2)
In this section, we construct the RW solutions for focusing space shifted nonlocal NLS equation (2) through the DT. This derivation follows the DT [14] with the Lax pair (3a) and (3b) under the spectrum transformation \(z=i\lambda \), which implies the symmetric condition
where
Let’s review the DT in the ZS-AKNS system
where \(\Phi _{1}\) is the column eigenvectors solution of the transformed Lax pair with \(\lambda =\lambda _{1}\) and \(\Psi _{1}\) is row eigenvectors solution of the one with \(\lambda =\zeta _{1}\). The relationship between the old and new potentials is
For Eq. (2), the Lax pair satisfies the following symmetry
Using the above symmetries, we can obtain the symmetries of wave functions \(\Phi \) and adjoint wave functions \(\Psi \). Applying these symmetries to the Lax pair, we have
Thus, if \(\Phi (x)\) is a wave function of the linear system at \(\lambda \), then \(\sigma _{1}\Phi ^{*}(x_{0}-x)\) is a wave function of this same system at \(-\lambda ^{*}\). In the same wave, if \(\Psi (x)\) is a wave function of the linear system at \(\zeta \), then \(\Psi ^{*}(x_{0}-x)\sigma _{1}\) is a wave function of this same system at \(-\zeta ^{*}\).

The nonsingular first-order RW with a \(r_{0}=-1/3,s_{0}=1/7,=-4\); b \(r_{0}=-1/3,s_{0}=1/7,=0\); c \(r_{0}=-1/4,s_{0}=-1/3,=4\). d– f are density plots of the above 3D figures

The singular first-order RW with \(r_{0}=1,s_{0}=-2,x_{0}=2\) (left). On the right is density plot

Density plot of second-order rogue waves for strong interaction (above) with \(r_{0}=1/5, s_{0}=-1/5, r_{1}=s_{1}=0\) and weak interaction (below) with \(r_{0}=1/2, s_{0}=-1/4, r_{1}=-s_{1}=200\) at \(x_0=-2,0,2\) from left to right, respectively
Under the above symmetric condition, if \(\lambda _{1},\zeta _{1}\in i\mathbb {R}\) and the wave functions satisfy
where \(\alpha ,\beta \) are complex constants, the transformation (11) is the DT of the focusing space shifted nonlocal NLS equation (2). Thus we directly give the multi-RW solutions of the focusing space shifted nonlocal NLS equation
where
The eigenfunctions \(\phi (\lambda )=(\phi _{1},\phi _{2})^{T}\) and \(\psi (\zeta )=(\psi _{1},\psi _{2})\) are given by
where \(s_{k}\) and \(r_{k}~(k=0,1,\ldots ,n-1)\) are arbitrary real parameters.

Six collapsing second-order RWs. a \(r_{0}=2, s_{0}=2, r_{1}=40, s_{1}=40, x_{0}=1\); b \(r_{0}=s_{0}=4, r_{1}=s_{1}=-30, x_{0}=-\frac{1}{2}\); c \(r_{0}=-s_{0}=1, r_{1}=s_{1}=20, x_{0}=1\); d \(r_{0}=s_{0}=8, r_{1}=-s_{1}=30, x_{0}=2\); e \(r_{0}=s_{0}=8, r_{1}=-s_{1}=-30, x_{0}=0\); f \(r_{0}=s_{0}=8, r_{1}=s_{1}=-30, x_{0}=-2\)
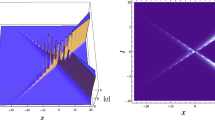
When \(N=1\), we derive the first-order RW from (16) as
If we set \(t_{0}=(r_{0}-s_{0})/4\) and \(b=(r_{0}+s_{0})/2\), the solution can be rewritten as
where \(\hat{t}=t+t_{0}, \hat{x}=x-x_{0}/2\). The first-order RW (18) is nonsingular when \(b^{2}<1/4\). To understand the properties of this RW solution, the intensity minus background is
The nonsingular first-order RW solution (18) has three critical points: \((x_{1},t_{1})=(\frac{x_{0}}{2},-t_{0}),(x_{2,3},t_{2,3})= (\frac{x_{0}}{2}\mp \frac{1}{2}\sqrt{\frac{4b^2+3}{b^2+1}},-t_{0}\pm \frac{b}{4}\sqrt{\frac{4b^2+3}{b^2+1}})\). The first point \((x_{1},t_{1})\) is a maximum amplitude with \(|{q[1]|}_\mathrm{max}=3+\frac{16b^2}{1-4b^2}\) and the other two critical points \((x_{2,3},t_{2,3})\) are minimum, at which the amplitudes reduce to zero. We can see the background value \(|q[1]|\rightarrow 1\) as \(x,t\rightarrow \infty \) and the space shift \(x_{0}\) produces \(x_{0}/2\) spatial translation on RWs (18) (see Fig. 4). When \(b^{2}>1/4\), the RW solution collapses at point \((x,t)=(\frac{x_0}{2},-t_{0}\pm \frac{1}{4}\sqrt{4b^{2}-1})\) (see Fig. 5).
We remark here that the RWs cannot be considered as time-translation invariance since the time shift transformation \(\hat{t}\) and peak amplitude associates with the same parameters \(s_{0},r_{0}\).
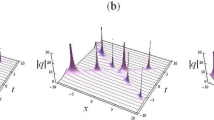
When \(N=2\), we get the second-order RWs from the formula (16). The explicit expressions of the solutions are given in Appendix, which has five parameters \(s_{j},r_{j},(j=0,1)\) and \(x_0\). If we changed these parameters, the different types of singular and nonsingular RWs are derived.
-
When \(r_{1}=s_{1}=0\), the second-order RW exists in the regime of strong interaction, with the corresponding density graphs exhibited in Fig. 6a–c.
-
When \(r_{1}s_{1}\ne 0\), the weak interaction occurs and the second-order RW splits into three first-order RWs, which form a triangular pattern, see Fig. 6d–f.
Moreover, the abundant collapsing second-order RW solutions can be obtained by choosing proper parameters. They display a variety of profiles, including the quadrilaterals, triangles as well as cyclic structures, which represent singular second-order RWs (see Fig. 7). Interestingly, among the collapsing RWs, there exist two kinds of nonsingular RWs. The ones is on the horizontal x-axis (see Fig. 7a) and the other is located in the centre of quadrilateral structures (see Fig. 7b). The rest of six collapsing second-order RWs with the corresponding density plots are displayed in Fig. 7c–f. These models have appeared in the local NLS equation, but each of which has no “space shift” effect on RWs [33].
Thus, it demonstrates that the peak and depression points increase spatial translational displacement of \(x_{0}/2\) for each of the RWs, which is quite distinct from the ones in solitons with the increase of \(x_{0}\). We should point out that, by the reconstruction of different eigenfunction in the DT, we can also obtain type-II and type-III RW solutions as in the nonlocal NLS equation [14]. Although these RW solutions have the similar properties except the space translation, they cannot be obtained from a simple variable transformation.
4 Conclusions
In this paper, we have constructed the N-soliton solutions and multi-rogue wave solutions for defocusing and focusing space shifted nonlocal NLS equation on different plane-wave solutions. The asymptotic analysis has indicated that the elastic two-soliton solutions have rich soliton types. The effect of the space shift \(x_{0}\) on soliton solutions and multi-rogue wave solutions have been investigated. It is shown that the solitons of the space shifted nonlocal NLS equation possess the spatial translational distance with \(x_{0}\) and the RWs have the distance \(x_{0}/2\) compared with the same solutions in nonlocal NLS equation. But the space shift \(x_0\) does not affect the amplitude of solutions. Besides the results of the nonlocal NLS equation with space shifts obtained in this paper, it is worth studying other real and complex space–time shifted nonlocal equations.
Data availability
All data generated or analysed during this study are including in this published article.
References
Kivshar, Y.S., Agrawal, G.P.: Optical solitons: from fibers to photonic crstals. Academic Press, San Diego (2003)
Dalfovo F., Giorgini S., Pitaevskii L.P., etc.: Theor of Bose-Einstein condensation in trapped gases. Rev. Mod. Phys. 71, 463–512 (1999)
Yomosa, S.: Nonlinear Schrödinger equation on the molecular complex in solution: Towards a biophysics. J. Phys. Soc. Jpn. 35, 1738–1746 (1973)
Peregrine, D.H.: Water waves, nonlinear Schrödinger equations and their solutions. J. Aust. Math. Soc. B. 25, 16–43 (1983)
Ma L.Y., Zhang Y.L., Tang L., Shen S.F.: New rational and breather solutions of a higher-order integrable nonlinear Schrödinger equation. Appl. Math. Lett. 25, 122 107539 (2021)
Ablowitz, M.J., Segur, H.: Solitons and inverse scattering transfor. SIAM, Philadelphia, PA (1981)
Matveev, V.B., Salle, M.A.: Darboux transformations and solitons. Springer, Berlin (1991)
Levi, D.: On a new Darboux transformation for the construction of exact solutions of the Schrödinger equation. Inverse Probl. 4, 165–172 (1988)
Gu, C.H., Zhou, Z.X.: On Darboux transformations for soliton equations in high-dimensional spacetime. Lett. Math. Phys. 32, 1–10 (1994)
Yang, J., Zhang, Y.L., Ma, L.Y.: Multi-rogue wave solutions for a generalized integrable discrete nonlinear Schrödinger equation with higher-order excitations. Nonlinear Dyn. 105, 629–641 (2021)
Hirota, R.: Direct Methods in Soliton Theory. Springer-Verlag, Berlin (2004)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Li, M., Xu, T.: Dark and antidark soliton interactions in the nonlocal nonlinear Schrödinger equation with the self-induced parity-time-symmetric potential. Phys. Rev. E 91, 033202 (2015)
Yang, B., Yang, J.: Rogue wave in the nonlocal \(\cal{PT}\)-symmetric nonlinear Schrödinger equation. Lett. Math. Phys. 109, 945–973 (2019)
Gadzhimuradov, T.A., Agalarov, A.M.: Towards a gauge-equivalent magnetic structure of the nonlocal nonlinear Schrödinger equation. Phys. Rev. E 93, 062124 (2016)
Ma, L.Y., Zhu, Z.Z.: Nonlocal nonlinear Schrödinger equation and its discrete version: soliton solutions and gauge equivalence. J. Math. Phys. 57, 083507 (2016)
Ablowitz, M.J., Musslimani, Z.H.: Inverse scattering transform for the integrable nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 915–946 (2016)
Huang, X., Ling, L.: Soliton solutions for the nonlocal nonlinear Schrödinger equation. Eur. Phys. J. Plus 131, 148 (2016)
Gerdjikov, V.S., Saxena, A.: Complete integrability of nonlocal nonlinear Schrödinger equation. J. Math. Phys. 58, 013502 (2017)
Ma, L.Y., Shen, S.F., Zhu, Z.N.: Soliton solution and gauge equivalence for an integrable nonlocal complex modified Korteweg-de Vries equation. J. Math. Phys. 58, 103501 (2017)
Ji, J.L., Zhu, Z.Z.: Soliton solutions of an integrable nonlocal modified Korteweg-de Vries equation through inverse scattering transform. J. Math. Anal. 453, 973–984 (2017)
Li, L., Duan, C., Yu, F.: An improved Hirota bilinear method and new application for a nonlocal integrable complex modified Korteweg-de Vries (MKdV) equation. Phys. Lett. A 383, 1578–1582 (2019)
Zhang, G., Yan, Z.: Inverse scattering transforms and soliton solutions of focusing and defocusing nonlocal mKdV equations with non-zero boundar conditions. Phys. D 402, 132170 (2020)
Song, C.Q., Xiao, D.M., Zhu, Z.N.: Reverse space-time nonlocal Sasa-Satsuma equation and its solutions. J. Phys. Soc. Jpn. 86, 054001 (2017)
Ma, L.Y., Zhao, H.Q., Gu, H.: Integrability and gauge equivalence of the reverse space-time nonlocal Sasa-Satsuma equation. Nonlinear Dn. 91, 1909–1920 (2018)
Rao, J., Cheng, Y., He, J.S.: Rational and semirational solutions of the nonlocal Davey-Stewartson equations. Stud. Appl. Math. 4(139), 568–598 (2017)
Liu, Y., Mihalache, D., He, J.: Families of rational solutions of the y-nonlocal Davey-Stewartson II equation. Nonlinear Dyn. 2017, 2445–2455 (2017)
Rao, J., Zhang, Y., Fokas, A.S., He, J.S.: Rogue waves of the nonlocal Davey-Stewartson I equation. Nonlinearity 31, 4090–4107 (2018)
Zhou, Z.X.: Darboux Transformations and global explicit solutions for nonlocal Davey-Stewartson I Equation. Stud. Appl. Math. 141, 186–204 (2018)
Ablowitz, M.J., Musslimani, Z.H.: Integrable discrete PT symmetric model. Phys. Rev. E 90, 032912 (2014)
Ablowitz, M.J., Musslimani, Z.H.: Integrable space-time shifted nonlocal nonlinear equations. Phys. Rev. A 409, 127516 (2021)
Gürses, M., Pekcan, A.: Soliton solutions of the shifted nonlocal NLS and MKdV equations. Phys. Lett. A 422, 127793 (2022)
Yang B., Yang J.K.: Transformations between nonlocal and local integrable equations. Stud. Appl. Math. 140, 178–201 (2017)
Acknowledgements
The work of JY is supported by National Natural Science Foundation of China under Grant No.12001361, Young Teachers Training Assistance Program of Shanghai under Grant No. ZZEGDD20005, that of LYM by National Natural Science Foundation of China under Grant No.11701510.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The second-order RW solutions of (16) are expressed in details as follows
where
Rights and permissions
About this article

Cite this article
Yang, J., Song, HF., Fang, MS. et al. Solitons and rogue wave solutions of focusing and defocusing space shifted nonlocal nonlinear Schrödinger equation. Nonlinear Dyn 107, 3767–3777 (2022). https://doi.org/10.1007/s11071-021-07147-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-07147-y