
Abstract
The integrability of the reverse space–time nonlocal Sasa–Satsuma equation in the Liouville sense is established by showing the existence of infinitely many conservation laws and putting into a bi-Hamiltonian form. Further, we show that the nonlocal Sasa–Satsuma equation for focusing case and defocusing case is, respectively, gauge equivalent to a generalized Heisenberg-like equation and a modified generalized Heisenberg-like equation. Finally, by using of special variable transformations, various kinds of nonlinear waves are obtained from those of the classical counterpart.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear Schrödinger (NLS) equation and its various generalized versions (continuous and discrete) have been playing an important role in describing various physical phenomena [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]. In the literature [3], Sasa and Satsuma proposed the following higher-order extension of the NLS equation
where \(Q=Q(X,T)\) is a complex valued function of the real variables X and T, \(\varepsilon =\mp \,1\) and subscript denotes the partial derivative with respect to the corresponding variables. Taking the transformations [24]
Eq. (1.1) is reduced to
This system, referred as Sasa–Satsuma (SS) equation, has many important physical applications, such as dynamics of deep water waves [16, 17], pulse propagation in optical fibers [18, 19], and generally in dispersive nonlinear media [20]. Besides, many other achievements have been made for the model including the conserved quantities, the Hamiltonian structure, the inverse scattering transformation, the Darboux transformation, the Hirota bilinear representation and various kinds of solutions [21,22,23,24,25,26].
Very recently, investigations about the corresponding integrable nonlocal model have grown tremendously [27,28,29,30,31,32,33,34,35,36,37]. The physical application of these models can be found in various wave mixing phenomena under appropriate \({\mathcal {P}}{\mathcal {T}}\) symmetric settings. This work is concerned the reverse space–time nonlocal SS equation
Here and below, the bar refers to the complex conjugate, and coefficient \(\sigma \) defines the sign of the nonlinearity. It should be mentioned that the nonlinearities are nonlocal in case of optical beams in nonlinear dielectric waveguides or waveguide arrays with random variation of refractive index, size, or waveguide spacing [36]. In addition, the Lax pair for the nonlocal SS equation as well as its binary Darboux transformation were found in Ref. [31]. However, to the best of our knowledge, some important integrable properties of the nonlocal model including infinite number of conservation laws and bi-Hamiltonian structure have not been reported. It is known that the gauge equivalence of the nonlocal NLS equation with a Heisenberg-like equation and discrete version, as well as the SS equation related to the generalized Landau Lifshitz equation were described in Refs. [22, 38,39,40]. It is, therefore, natural to ask what is the gauge equivalent equation of the nonlocal SS equation. We further, from a different point of view, find different types of nonlinear waves of the nonlocal equation from those of the classical SS equation by making use of special variable transformations.
The rest of the paper is organized as follows. In Sects. 2 and 3, we report the derivation of an infinite number of conservation laws and bi-Hamiltonian structure for the nonlocal SS equation. In Sect. 4, the relation between nonlocal SS equation and a generalized Heisenberg-like equation is established with the explicit construction of the equivalent Lax pair. Finally, in Sect. 5 we study some different types of nonlinear waves of the nonlocal SS equation by special variable transformations.
2 Conservation laws
The existence of infinite number of conservation laws is an important indicator for the complete integrability. The Lax pair for Eq. (1.4) is given by [31]
where
with
Here \(\varphi =(\varphi _{1}(x,t,\lambda ),\varphi _{2}(x,t,\lambda ),\varphi _{3}(x,t,\lambda ))^T \) is a vector eigenfunction and \(\lambda \) is a complex spectral parameter. The zero curvature condition \(M_t-N_x+[M,N]=0\) can yield Eq. (1.4).
By means of the Lax representation, we can derive infinitely many conservation laws for the nonlocal SS equation. Introducing the variables
the first equation of spectral problem (2.1) is written as a set of coupled Riccati equations
Next, we expand \(\omega _{j}\) as series,
By substituting (2.5) into (2.4) and comparing the coefficients of \(\lambda \), we raise
and the recursion formulas
On the other hand, it is easy to see that \([\ln \varphi _{3}(x,t,\lambda )]_{xt}=[\ln \varphi _{3}(x,t,\lambda )]_{tx}\), which implies
where
Then, we expand \(\rho \) and \( \mathcal {J}\) as
In comparison with the powers of \(\lambda \) on both sides of Eq. (2.6), we obtain an infinite number of conservation laws for the model
where
3 Hamiltonian structure
To establish the Hamiltonian structure of the nonlocal SS equation, we introduce a basic Hamiltonian operator
and a symplectic structure
Then, a hereditary recursion operator \(\mathcal {R}=\Theta _1 \mathcal {S}\) that can be written as
where
Hence, due to the Magri [41] and Olver [42], the nonlocal SS equation has an infinite hierarchy of compatible Hamiltonian structures \(\Theta _j=\mathcal {R}^{j-1} \Theta _1\), \(j=2,3,\ldots \). and an infinite hierarchy of commuting symmetries of the form \(\mathcal {K}_j=\mathcal {R}^{j-1} \mathcal {K}_1\), \(j=2,3,\ldots \) where \(\mathcal {K}_1= \sigma ( u_x(x,t),{\bar{u}}_x(-x,-t))^T\). Therefore, the nonlocal SS equation is a bi-Hamiltonian system
where the Hamiltonian functions are
Here \(\frac{\delta }{\delta {\mathbf {u}}}\) denotes variational derivative with respect to \({\mathbf {u}}\).
4 Gauge equivalent system
In this section, we show that the nonlocal focusing (\(\sigma =1\)) SS equation and the nonlocal defocusing (\(\sigma =-\,1\)) SS equation are gauge equivalent to a generalized Heisenberg-like equation and a modified generalized Heisenberg-like equation, respectively.
We first make the following gauge transformation
where G is a solution of system (2.1) for \(\lambda =0\), i.e.,
For the focusing case, we obtain
in which we have used the following important identities
The integrability condition \({\tilde{M}}_t-{\tilde{N}}_x+[{\tilde{M}},{\tilde{N}}]=0\) for new linear equation
yields a generalized integrable Heisenberg-like equation
For the defocusing case, setting \(S=-iG^{-\,1}J G\), from gauge transformation (4.1), we have
where the following three important identities have been used
The zero curvature condition of (4.5) leads to a modified generalized integrable Heisenberg-like equation

5 Different types of nonlinear waves
In this section, we construct analytical solutions of the nonlocal SS equation from those of the classical SS equation through some special variable transformations. Dynamical properties of the analytical solutions present the structural diversity of the nonlinear waves. Notice that nonlocal SS equation (1.4) can be converted to classical SS equation (1.3) by introducing the variable transformations [43]
but with the opposite sign of nonlinearity. We have omitted the symbol \(\hat{}\) for the SS equation. It means that x and t in nonlocal SS equation are treated as real variables when taking complex conjugate of \({\bar{u}}(-x,-t)\), however, the transformations, \(x=i {\hat{x}},~ t=-i {\hat{t}}\) with real \({\hat{x}}, {\hat{t}}\), change sign of x, t, which convert the nonlocal term \({\bar{u}}(-x,-t)\) of (1.4) to the local term \(\bar{{\hat{u}}}({\hat{x}},{\hat{t}})\) of (1.3).

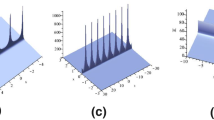
a Double-hump soliton solution of the focusing SS equation; b module \(|u(x,t)|^2\) of solution (5.5) to nonlocal defocusing SS equation; c, d \(\text {Re}(u(x,t){\bar{u}}(-x,-t))\) and \(\text {Im}(u(x,t){\bar{u}}(-x,-t))\) with periods \(T_\mathrm{space}=\frac{\pi }{2\eta }\) and \(T_\mathrm{time}=\frac{\pi }{8(\eta ^2-3\xi ^2)}\), respectively. Parameters \(\xi =1/4,\eta =1\)
5.1 Nonlinear waves of nonlocal defocusing SS equation
Case 1 (periodic wave) Choosing the one-soliton solution of the classical focusing (\(\varepsilon =1\)) SS equation [3]
and using the reverse of transformations (5.1), i.e., \({\hat{x}}=-ix, {\hat{t}}=it\), we get the solution of the nonlocal defocusing (\(\sigma =-1\)) SS equation
The dynamics for \(|u(x,t)|^2\), \(\text {Re}(u(x,t){\bar{u}}(-x,-t))\) and \(\text {Im}(u(x,t){\bar{u}}(-x,-t))\) are illustrated in Fig. 1, where parameters are taken as \(a=1,c=1,w=1/2,\delta =1\). We can see that \(\text {Re}(u(x,t){\bar{u}}(-x,-t))\) and \(\text {Im}(u(x,t){\bar{u}}(-x,-t))\) are periodic in both space and time with periods \(T_\mathrm{space}=\frac{\pi }{c}\) and \(T_\mathrm{time}=\frac{\pi }{c(3a^2-c^2)}\), respectively.

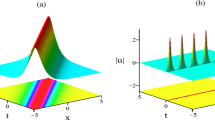
a Breather solution of the focusing SS equation; b, c singular solution of the nonlocal defocusing SS equation; d Density plot of breather soliton of the focusing SS equation; e and f are density plot of b and c, respectively. Parameters \(\xi =1/2,\eta =1/2\)
Case 2 For the double-hump soliton solution of the classical focusing SS equation [24]
where \(\xi ,\eta \in R\) and \(|\xi |<|\eta |\), the reverse of transformations (5.1) yields the following solution of the nonlocal defocusing SS equation
This solution is displayed in Fig. 2 when \(\xi =1/4,\eta =1\). The module of solution (5.5) grows exponentially, but \(\text {Re}(u(x,t){\bar{u}}(-x,-t))\) and \(\text {Im}(u(x,t){\bar{u}}(-x,-t))\) are still periodic in both space and time with periods \(T_\mathrm{space}=\frac{\pi }{2\eta }\) and \(T_\mathrm{time}=\frac{\pi }{8(\eta ^2-3\xi ^2)}\), respectively.
Case 3 For the breather solution of the classical focusing SS equation [24], setting
and employing the reverse of transformations (5.1), we obtain a singular solution for the nonlocal defocusing SS equation
The singular point (x, t) satisfies
This solution is displayed in Fig. 3 with \(\xi =1/2,\eta =1/2\).
Case 4 (W-type and dark soliton solution) The classical focusing SS equation admits the following periodic solution
where \(\tau =\sqrt{2\rho ^2-\lambda ^2},m=4\tau (\rho ^2+\lambda ^2),\lambda ,\rho \in R\) and \(2|\rho |>|\lambda |\). Using the reverse of transformations (5.1), we yield a W-type solution of the nonlocal defocusing SS equation
When \(\lambda =1/2,\rho =1\), the dynamical profile of solution (5.10) is displayed in Fig. 4. If we choose \(\lambda =1,\rho =1\), dark soliton solution can be obtained, which is depicted in Fig. 5.

a Periodic soliton solution of the focusing SS equation; b–d W-type solution of nonlocal defocusing SS equation. Parameters \(\lambda =1/2,\rho =1\)

a–c Dark soliton solution of nonlocal defocusing SS equation with \(\lambda =1,\rho =1\)


Periodic solution (5.14) of the nonlocal focusing SS equation with \(a=2,b=2,c=1,\xi =1/2\). a Defocusing SS. b Nonlocal focusing SS
Here we remark that, by choosing proper parameters, W-type (or M-type) and dark soliton solutions of nonlocal defocusing SS equation can also be derived from the periodic solution of the focusing SS equation under the variable transformations. These solutions have been obtained by Darboux transformation in [31].
On the other hand, one can check that the solution of nonlocal SS equation can also be converted into those of classical SS equation by means of transformations (5.1). For example, the breather solution of the nonlocal defocusing SS equation is given by [31]
where \(\xi =x+4\lambda ^2t, \eta =\tau x+mt,\tau =\sqrt{2\rho ^2-\lambda ^2},m=4\tau (\rho ^2+\lambda ^2)\). Under the transformation
we arrive to a semi-periodical solution of the focusing SS equation
where \(\xi _1=x-4\lambda ^2t, \eta _1=\tau x-mt\). The dynamics of the solution is displayed in Fig. 6b. We can see that the expression of (5.13) tends to a constant \(\rho \) as \(t\rightarrow -\infty \), but to quasi-periodic oscillation as \(t\rightarrow +\infty \).
5.2 Periodic wave solution of nonlocal focusing SS equation
For the dark one-soliton solution of the defocusing (\(\varepsilon =-\,1\)) SS equation [25], under the reverse of transformations (5.1), i.e., \({\hat{x}}=-ix, {\hat{t}}=it\), we derive a periodic wave solution of the nonlocal focusing SS equation
We thus see that the solution is periodic in both space and time with periods \(T_\mathrm{space}=\frac{\pi }{\mu -\xi }\) and \(T_\mathrm{time}=\frac{\pi }{4(\xi ^3+(c^2-\xi ^2)\mu )}\). The dynamics of the solution is shown in Fig. 7 as \(a=2,b=2,c=1,\xi =1/2\).
In short, some other kinds of solutions for the nonlocal focusing or defocusing SS equations can be studied through the transformation based on corresponding solutions of defocusing or focusing SS equation, respectively. The symbols x and t should be regarded as imaginary variables under the transformation of (5.1), but real variables within the scope of the nonlocal system. This provides an effective tool in search for explicit solutions of nonlocal systems.
6 Conclusion
In this paper, we have investigated the integrability of the reverse space–time Sasa–Satsuma equation in the Liouville sense including the infinite many conservation laws and bi-Hamiltonian form. We have also shown that, under the gauge transformations, the nonlocal Sasa–Satsuma equation for focusing case and defocusing case are, respectively, gauge equivalent to a generalized Heisenberg-like equation and a modified generalized Heisenberg-like equation. By using of special variable transformations, various kinds of explicit solutions of the reverse space–time Sasa–Satsuma equation are derived from those of the classical counterpart.
References
Agrawal, G.P.: Nonlinear Fiber Optics, 3rd edn. Academic Press, New York (2001)
Ablowitz, M.J., Prinari, B., Trubatch, A.D.: Discrete and Continuous Nonlinear Schr\(\ddot{o}\)dinger Systems. Cambridge University Press, Cambridge (2004)
Sasa, N., Satsuma, J.: New type of soliton solutions for a higher-order nonlinear Schrödinger equation. J. Phys. Soc. Jpn. 60, 409–417 (1991)
Ali, S., Rizvi, S.T.R., Younis, M.: Traveling wave solutions for nonlinear dispersive water-wave systems with time-dependent coefficients. Nonlinear Dyn. 82, 1755–1762 (2015)
Cheemaa, N., Younis, M.: New and more exact traveling wave solutions to integrable (\(2+1\))-dimensional Maccari system. Nonlinear Dyn. 83, 1395–1401 (2016)
Arnous, A.H., Mahmood, S.A., Younis, M.: Dynamics of optical solitons in dual-core fibers via two integration schemes. Superlattice Microstruct. 106, 156–162 (2017)
Afzal, S.S., Younis, M., Rizvi, S.T.R.: Optical dark and dark-singular solitons with anti-cubic nonlinearity. Optik 147, 27–31 (2017)
Zhao, H.Q., Yuan, J.Y.: A semi-discrete integrable multi-component coherently coupled nonlinear Schrödinger system. J. Phys. A Math. Theor. 49, 275204 (2016)
Zhao, H.Q., Zhu, Z.N.: Solitons and dynamic properties of the coupled semidiscrete Hirota equation. AIP Adv. 3, 022111 (2013)
Pickering, A., Zhao, H.Q., Zhu, Z.N.: On the continuum limit for a semidiscrete Hirota equation. Proc. R. Soc. A 472, 20160628 (2016)
Wang, L., Zhu, Y.J., Qi, F.H., Li, M., Guo, R.: Modulational instability, higher-order localized wave structures, and nonlinear wave interactions for a nonautonomous Lenells–Fokas equation in inhomogeneous fibers. Chaos 25, 063111 (2015)
Wang, L., Zhang, J.H., Liu, C., Li, M., Qi, F.H.: Breather transition dynamics, Peregrine combs and walls, and modulation instability in a variable-coefficient nonlinear Schrödinger equation with higher-order effects. Phys. Rev. E 93, 062217 (2016)
Cai, L.Y., Wang, X., Wang, L., Li, M., Liu, Y., Shi, Y.Y.: Nonautonomous multi-peak solitons and modulation instability for a variable-coefficient nonlinear Schrödinger equation with higher-order effects. Nonlinear Dyn. 90, 2221–2230 (2017)
Zhang, J.H., Wang, L., Liu, C.: Superregular breathers, characteristics of nonlinear stage of modulation instability induced by higher-order effects. Proc. R. Soc. A 473, 20160681 (2017)
Zhao, H.Q., Yuan, J.Y., Zhu, Z.N.: Integrable semi-discrete Kundu–Eckhaus equation: Darboux transformation, breather, rogue wave and continuous limit theory. J. Nonlinear Sci. (2017). https://doi.org/10.1007/s00332-017-9399-9
Sedletskii, Yu.V.: The fourth-order nonlinear Schrödinger equation for the envelope of Stokes waves on the surface of a finite-depth fluid. J. Exp. Theor. Phys. 97, 180–193 (2003)
Slunyaev, A.V.: A high-order nonlinear envelope equation for gravity waves in finite-depth water. J. Exp. Theor. Phys. 101, 926–941 (2005)
Potasek, M.J., Tabor, M.: Exact solutions for an extended nonlinear Schrödinger equation. Phys. Lett. A. 154, 449–452 (1991)
Cavalcanti, S.B., Cressoni, J.C., da Cruz, H.R., Gouveia-Neto, A.S.: Modulation instability in the region of minimum group-velocity dispersion of single-mode optical fibers via an extended nonlinear Schrödinger equation. Phys. Rev. A 43, 6162–6165 (1991)
Trippenbach, M., Band, Y.B.: Effects of self-steepening and self-frequency shifting on short-pulse splitting in dispersive nonlinear media. Phys. Rev. A 57, 4791–4803 (1998)
Mihalache, D., Torner, L., Moldoveanu, F., Panoiu, N.C., Truta, N.: Inverse-scattering approach to femtosecond solitons in monomode optical fibers. Phys. Rev. E 48, 4699–4709 (1993)
Ghosh, S., Kundu, A., Nandy, S.: Soliton solutions, Liouville integrability and gauge equivalence of Sasa–Satsuma equation. J. Math. Phys. 40, 1993–2000 (1999)
Gilson, C., Hietarinta, J., Nimmo, J.J.C., Ohta, Y.: Sasa–Satsuma higher-order nonlinear Schrödinger equation and its bilinearization and multisoliton solutions. Phys. Rev. E 68, 016614 (2003)
Nimmo, J.J.C., Yilmaz, H.: Binary Darboux transformation for the Sasa–Satsuma equation. J. Phys. A Math. Theor. 48, 425202 (2015)
Zhang, H.Q., Hu, R., Zhang, M.Y.: Darboux transformation and dark soliton solution for the defocusing Sasa–Satsuma equation. Appl. Math. Lett. 69, 101–105 (2017)
Bandelow, U., Akhmediev, N.: Sasa-Satsuma equation: soliton on a background and its limiting cases. Phys. Rev. E 86, 026606 (2012)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Ji, J.L., Zhu, Z.N.: On a nonlocal modified Korteweg-de Vries equation: integrability, Darboux transformation and soliton solutions. Commun. Nonlinear Sci. Numer. Simul. 42, 699–708 (2017)
Ma, L.Y., Shen, S.F., Zhu, Z.N.: Soliton solution and gauge equivalence for an integrable nonlocal complex modified Korteweg–de Vries equation. J. Math. Phys. 58, 103501 (2017)
Song, C.Q., Xiao, D.M., Zhu, Z.N.: Solitons and dynamics for a general integrable nonlocal coupled nonlinear Schrödinger equation. Commun. Nonlinear Sci. Numer. Simul. 45, 13–28 (2017)
Song, C.Q., Xiao, D.M., Zhu, Z.N.: Reverse space–time nonlocal Sasa–Satsuma equation and its solutions. J. Phys. Soc. Jpn. 86, 054001 (2017)
Dai, C.Q., Wang, Y., Liu, J.: Spatiotemporal Hermite–Gaussian solitons of a (\(3+1\))-dimensional partially nonlocal nonlinear Schrödinger equation. Nonlinear Dyn. 84, 1157–1161 (2016)
Zhang, Y., Liu, Y.P., Tang, X.Y.: A general integrable three-component coupled nonlocal nonlinear Schrödinger equation. Nonlinear Dyn. 89, 2729–2738 (2017)
Wang, Y.Y., Dai, C.Q., Wang, X.G.: Stable localized spatial solitons in PT-symmetric potentials with power-law nonlinearity. Nonlinear Dyn. 77, 1323–1330 (2014)
Dai, C.Q., Wang, Y.Y.: Controllable combined Peregrine soliton and Kuznetsov–Ma soliton in PT-symmetric nonlinear couplers with gain and loss. Nonlinear Dyn. 80, 715–721 (2015)
Pertsch, T., Peschel, U., Kobelke, J., Schuster, K., Bartelt, H., Nolte, S., Tunnermann, A., Lederer, F.: Nonlinearity and disorder in fiber arrays. Phys. Rev. Lett. 93, 053901 (2004)
Lou, S.Y., Huang, F.: Alice–Bob physics: coherent solutions of nonlocal KdV systems. Sci. Rep. 7, 869 (2017)
Ma, L.Y., Zhu, Z.N.: Nonlocal nonlinear Schrödinger equation and its discrete version: soliton solutions and gauge equivalence. J. Math. Phys. 57, 083507 (2016)
Gadzhimuradov, T.A., Agalarov, A.M.: Towards a gauge-equivalent magnetic structure of the nonlocal nonlinear Schrödinger equation. Phys. Rev. A 93, 062124 (2016)
Ma, L.Y., Shen, S.F., Zhu, Z.N.: From discrete nonlocal nonlinear Schrödinger equation to coupled discrete Heisenberg ferromagnet equation. arXiv:1704.06937 [nlin.SI] (2017)
Magri, F.: A simple model of the integrable Hamiltonian equation. J. Math. Phys. 19, 1156–1162 (1978)
Olver, P.J.: Evolution equations possessing infinitely many symmetries. J. Math. Phys. 18, 1212–1215 (1977)
Yang, B., Yang, J.K.: Transformations between nolocal and local integrable equations. arXiv:1705.00332vl [nlin.PS] (2017)
Acknowledgements
The work of HQZ is supported by Natural Science Foundation of Shanghai (Grant No. 17ZR1411600) and Humanities and Social Science Research Planning Fund of the Education Ministry of China (Grant No. 15YJCZH201). The work of LYM is supported by National Natural Science Foundation of China (Grant No. 11701510) and China Postdoctoral Science Foundation funded project (No. 2017M621964).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ma, Ly., Zhao, Hq. & Gu, H. Integrability and gauge equivalence of the reverse space–time nonlocal Sasa–Satsuma equation . Nonlinear Dyn 91, 1909–1920 (2018). https://doi.org/10.1007/s11071-017-3989-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3989-9