
Abstract
Utilizing the Riemann-Hilbert (RH) approach, we shed light on the spectral structure of a defocusing shifted nonlocal NLS equation with a space-shifted parameter from which we derive its soliton solutions. The spectral structure involves the scattering data and their corresponding symmetry relations. Firstly, by performing spectral analysis of the corresponding Lax pair, we explore in detail the spectral structure of the defocusing shifted nonlocal NLS equation. It is shown that the zeros of the RH problem of the defocusing shifted nonlocal NLS equation do not allow for purely imaginary ones, which is rather different from its focusing counterpart. Secondly, based on the revealed spectral structure, the even-order soliton solutions of the defocusing shifted nonlocal NLS equation are rigorously obtained. Thirdly, the dynamical properties underlying the obtained soliton solutions are analyzed and then graphically illustrated by highlighting the role that the space-shifted parameter plays.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
It is well-known that the following coupled system of nonlinear evolution equations with two potential functions \(q=q(x,t),r=r(x,t)\),
comes as a compatibility condition of the celebrated Ablowitz–Kaup–Newell–Segur (AKNS) spectral problem [1]. Therefore, the coupled system (1.1) is usually referred to as the AKNS “\((q,r)\ \textrm{system}\)” in the literature. Also is known that the physically and mathematically significant nonlinear Schrödinger (NLS) equation [2]:
is a symmetry reduction of the AKNS “\((q,r)\ \textrm{system}\)” (1.1). In fact, if \(r=\varepsilon q^*\), the AKNS “\((q,r)\ \textrm{system}\)” (1.1) exactly reduces to the NLS Eq. (1.2). In (1.2), q(x, t) represents a complex-valued function of x, t, the symbol i denotes the imaginary unit, and the asterisk \(*\) is the complex conjugation. The NLS Eq. (1.2) appears in many physical contexts, such as nonlinear fiber optics, plasma physics, magneto-static spin waves, deep water waves, and others. Mathematically, the NLS Eq. (1.2) is known to be integrable by the inverse scattering transform (IST) from which soliton solutions can be found. In addition, other integrability properties, such as infinite number of conserved quantities, the Hamiltonian structure, and so on, have also been discovered for (1.2). We also note that the cases \(\varepsilon =\mp 1\) in the NLS Eq. (1.2) represent the focusing and the defocusing nonlinearities, respectively. The defocusing case of (1.2), compared with its focusing counterpart, does not admit soliton solutions that vanish at infinity. In fact, the defocusing NLS equation, i.e., (1.2) with \(\varepsilon =1\), admits soliton solutions which have the nontrivial background intensity.
In 2013, an integrable nonlocal type soliton equation [3]:
was proposed and studied by Ablowitz and Musslimani via imposing a novel nonlocal symmetry reduction \(r(x,t)=\varepsilon q^*(-x,t)\) in the AKNS “\((q,r)\ \textrm{system}\)” (1.1). This is rather surprising since many researchers generally believe that it is not easy to obtain intrinsically new integrable systems in soliton theory. Via the nonlocal NLS Eq. (1.3), the solution states at positions x and \(-x\) are directly coupled, which is reminiscent of quantum entanglement between pairs of particles in quantum mechanics. It has been shown that as a nonlocal reduction of the AKNS “\((q,r)\ \textrm{system}\)” (1.1), the nonlocal NLS Eq. (1.3) still admits Lax pair formulation, has an infinite number of conservation laws. It is also easy to check that the nonlocal NLS Eq. (1.3) is invariant under the parity-time transformation: \(x\rightarrow -x,t\rightarrow -t\) as well as complex conjugation. In this sense, the nonlocal NLS Eq. (1.3) is said to be parity-time (\({\mathcal{P}\mathcal{T}}\)) symmetric which is a hot topic in modern physics [4]. Significantly, the nonlocal NLS Eq. (1.3) can also be viewed as asymptotic quasi-momochromatic reductions of some other nonlinear evolution systems [5]. Moreover, the relations between the nonlocal NLS Eq. (1.3) and other physically important equations were established in [6, 7]. In the literature, many classical tools for local soliton equations have been extended to the nonlocal NLS Eq. (1.3), such as the IST, the Riemann–Hilbert (RH) approach, the Darboux transformation, the Hirota bilinear method, and others [8,9,10,11,12,13,14]. Nowadays, the study of nonlocal type soliton equations has become a hot research direction and has attracted considerable interests in integrable theory [15,16,17,18,19,20,21].
What is more interesting is that, after the discovery of the nonlocal NLS Eq. (1.3), Ablowitz and Musslimani subsequently in 2021 further introduced the shifted versions of the nonlocal NLS Eq. (1.3) [22], which are now referred to as the focusing shifted nonlocal NLS equation:
and the defocusing shifted nonlocal NLS equation:
by imposing the shifted nonlocal symmetry reductions \(r(x,t)=- q^*(x_0-x,t)\) and \(r(x,t)= q^*(x_0-x,t)\), respectively, in the AKNS “\((q,r)\ \textrm{system}\)” (1.1). In Eqs. (1.4)–(1.5), \(x_0\) is an arbitrary real parameter denoting the space shift. Obviously, when \(x_0\) is set to be zero, Eqs. (1.4)–(1.5) will reduce back to their corresponding standard unshifted nonlocal NLS Eq. (1.3). Regarding the focusing shifted nonlocal NLS Eq. (1.4), the IST method and single- and two-soliton solutions for it were studied in [22]. Subsequently, three types of Darboux transformations and general soliton solutions for (1.4) were presented in [23]. In addition, several reduction techniques for (1.4) based on Hirota bilinear formulation and RH approach were studied in [24,25,26]. Very recently, multiple double-pole solitons and multiple negaton-type solitons were derived for (1.4) via a long-wave technique [27]. However, to our knowledge, there are rare results about the defocusing shifted nonlocal NLS Eq. (1.5) apart from the reduction techniques investigated by using the bilinear approach in [24, 25].
In this paper, we shall focus on the defocusing shifted nonlocal NLS Eq. (1.5) in the framework of RH approach. It is known that the RH approach is a modern version of IST for integrable soliton equations. Though the IST method in the perspective of RH problem for the focusing shifted NLS Eq. (1.4) was revealed in [22], whether the RH approach applies to the defocusing shifted NLS Eq. (1.5) was still an open problem. Moreover, it has been shown that the focusing and the defocusing cases of the unshifted nonlocal NLS Eq. (1.3) share different spectral structures, and thus their RH approaches differ from each other [28]. Hence we are motivated that the defocusing shifted nonlocal NLS Eq. (1.5) with general \(x_0\) might have diverse spectral structures compared with its focusing counterpart (1.4). In turn, their soliton solutions might also be different. This paper will focus on these aspects.
This paper is organized as follows. In Sect. 2, we shall perform spectral analysis of the Lax pair of the defocusing shifted nonlocal NLS Eq. (1.5). Particularly, we explore in detail the spectral structure of the defocusing shifted nonlocal NLS Eq. (1.5). It will be shown that the zeros of the RH problem of the defocusing shifted nonlocal NLS Eq. (1.5) do not allow for purely imaginary ones, which is rather different from that of its focusing counterpart (1.4). Moreover, based on the revealed spectral structure, the even-order soliton solutions of the defocusing shifted nonlocal NLS Eq. (1.5) will be rigorously obtained. In addition, the dynamical properties underlying the obtained soliton solutions will be analyzed and then graphically illustrated by highlighting the role that the space-shifted parameter \(x_0\) plays. Section 3 gives our conclusions.
2 RH approach
In this section, by employing the RH approach [29,30,31,32,33,34,35,36,37,38,39,40,41,42], we intend to perform spectral analysis and then derive soliton solutions for the defocusing shifted nonlocal NLS Eq. (1.5). It is known the RH approach heavily relies on the RH problem constructed via the corresponding Lax pair.
2.1 Lax pair and RH problem
An important property of the AKNS spectral theory is that a reduced version of a Lax-integrable equation is still integrable admitting the corresponding Lax pair formulation. Therefore, we can obtain the Lax pair of the defocusing shifted nonlocal NLS Eq. (1.5) by imposing the defocusing shifted nonlocal symmetry reduction: \(r(x,t)= q^*(x_0-x,t)\) in that of the AKNS “\((q,r)\ \textrm{system}\)” (1.1) [22],
in which \(\Psi =\Psi (x,t,\lambda )\) is a matrix function of the complex spectral parameter \(\lambda \), and
with
Indeed, one can check that the compatibility condition of (2.1), \(\Psi _{xt}=\Psi _{tx}\), yields the zero-curvature equation, \(\textbf{U}_t-\textbf{V}_x+[\textbf{U},\textbf{V}]=\textbf{0}\), which exactly gives the defocusing shifted nonlocal NLS Eq. (1.5). This equation belongs to the shifted nonlocal reverse-space type since the evolution of the field depends on both the values at (x, t) and \((x_0-x,t)\). Based on the Lax pair (2.1), we shall perform spectral analysis and then derive soliton solutions for the defocusing shifted nonlocal NLS Eq. (1.5).
To perform spectral analysis conveniently on the Lax pair (2.1), we first introduce a new matrix spectral function \(J=J(x,t,\lambda )\) defined as
Using (2.2), the Lax pair (2.1) can be rewritten in another form
where Q is the potential matrix in (2.1), and \(\widetilde{Q}=2\lambda Q+ { i} (Q^2+Q_x)\sigma _3\).
Since the defocusing shifted nonlocal NLS Eq. (1.5) comes as a reduction of the AKNS “\((q,r)\ \textrm{system}\)” (1.1), the procedure for deriving an RH problem for sufficiently decaying potentials is similar as that of the unreduced AKNS “\((q,r)\ \textrm{system}\)” (1.1). In fact, we can establish an RH problem for the defocusing shifted nonlocal NLS Eq. (1.5) as
by following the way to arrive at the RH problem for the AKNS “\((q,r)\ \textrm{system}\)” (1.1) [29]. In the RH problem (2.4), \(P^+(\lambda )\) is the limit of an analytic matrix function \(P_1(\lambda )\) from the left-hand side of \(\mathbb {R}\), \(P^-(\lambda )\) is the limit of another analytic matrix function \(P_2(\lambda )\) from the right-hand side of \(\mathbb {R}\), while the symbol \({\mathbb {I}}\) denotes the \(2\times 2\) identity matrix. The asymptotic states in (2.4) are canonical normalization conditions of the RH problem, while \(s_{12}(0,\lambda ),r_{21}(0,\lambda )\) are two reflection coefficients defined on the real \(\lambda \)-axis at the initial states. In fact, the two sectionally analytic matrix functions \(P_1(\lambda )\) and \(P_2(\lambda )\) are constructed as
where each \([J_{\pm }]_l\ (l=1,2)\) denotes the l-th column of the Jost solutions \(J_{\pm }=J_{\pm }(x,t,\lambda )\) of (2.3) satisfying \(J_{\pm }\rightarrow {\mathbb {I}}\) as \(x\rightarrow \pm \infty \), and each \([J_\pm ^{-1}]^l\ (l=1,2)\) represents the l-th row of the matrix inverse \(J_\pm ^{-1}\). In fact, \(J_{\pm }\) are uniquely determined by the Volterra integral equations [29]
2.2 Scattering data and symmetry relations
In this section, we shall explore the scattering data and the corresponding symmetry relations determined by the Lax pair (2.3). Indeed, these are the core aspects in the RH approach. Generally, we assume the RH problem (2.4) is an irregular one which means that \(\textrm{det}\ P_1\) and \(\textrm{det}\ P_2\) have certain zeros in their analytic domains. Notice that the potential matrix \(Q=Q(x,t)\) in (2.3) satisfies the following symmetry relation
Then using the symmetry relation (2.6) and the Lax pair (2.3), we can arrive at the symmetry relations of \(P_1=P_1(x,t,\lambda )\) and \(P_2=P_2(x,t,\lambda )\), respectively
which are the key relations for establishing the symmetry relations of the scattering data. In fact, it follows from the symmetry relations (2.7)–(2.8) that the zeros of \(\textrm{det}\ P_1\) and \(\textrm{det}\ P_2\) appear as \((\lambda _l,-\lambda ^*_l)\) and \((\hat{\lambda }_l,-\hat{\lambda }^*_l)\) coupled types, where l is an integer. Correspondingly, we shall consider the kernels Ker \((P_1(\lambda _l))\), Ker \((P_1(-\lambda ^*_l))\), Ker\(\ (P_2(\hat{\lambda }_l))\), Ker \((P_2(-\hat{\lambda }^*_l))\), which are spanned by column vectors \(v_l=v_l(x,t),\nu _l=\nu _l(x,t)\) and row vectors \(\hat{v}_l=\hat{v}_l(x,t),\hat{\nu }_l=\hat{\nu }_l(x,t)\), respectively,
Using the Lax pair (2.3), the vectors \(v_l\) and \(\hat{v}_l\) can be readily calculated as
in which \(\theta _l=\theta _l(x,t)={i}\lambda _lx+2{ i}\lambda ^2_lt, \hat{\theta }_l=\hat{\theta }_l(x,t)=-{i}\hat{\lambda }_lx-2{i} \hat{\lambda }^2_lt,\) and \(v_{l,0},\hat{v}_{l,0}\) are complex column and row vectors, respectively. Obviously, \(v_{l,0},\hat{v}_{l,0}\) are independent of x, t. However, they rely on the space-shifted parameter \(x_0\). In a parallel way, the vectors \(\nu _l\) and \(\hat{\nu }_l\) can also be obtained from the Lax pair (2.3) as
where \(\vartheta _l=\vartheta _l(x,t)={ i}(-\lambda ^*_l)x+2{ i}(-\lambda ^*_l)^2t, \hat{\vartheta }_l=\hat{\vartheta }_l(x,t)=-{ i}(-\hat{\lambda }^*_l)x-2{ i}(-\hat{\lambda }_l^*)^2t,\) and \(\nu _{l,0},\hat{\nu }_{l,0}\) are complex column and row vectors, respectively. Similarly, \(\nu _{l,0},\hat{\nu }_{l,0}\) are independent of x, t, but they depend on the space-shifted parameter \(x_0\). Here we normally scale the second components of all \(v_{l,0},\hat{v}_{l,0},\nu _{l,0},\hat{\nu }_{l,0}\) as 1 without loss of generality, i.e.,
For symmetry relations of \(v_l,\hat{v}_{l},\nu _{l},\hat{\nu }_{l}\), we have from (2.7) that \(\nu ^*_l(x_0-x,t)=C\sigma ^{-1}v_l(x,t)\), and from (2.8) that \(\hat{\nu }^*_l(x_0-x,t)=\hat{C}\hat{v}_l(x,t)\sigma \), where \(C,\hat{C}\) are complex constants independent of \(x,t,x_0\). Therefore, we finally arrive at
From Eqs. (2.13)–(2.14), we know that \(\alpha _l,\hat{\alpha }_l,\beta _l,\hat{\beta }_l\) are all nonzero. Furthermore, (2.13)–(2.14) imply that the following conclusions about the zeros of \(\textrm{det}\ P_1\) and \(\textrm{det}\ P_2\) for the defocusing shifted nonlocal NLS Eq. (1.5).
Proposition 1
The defocusing shifted nonlocal NLS Eq. (1.5) does not allow for purely imaginary zeros for \(\textrm{det}\ P_1\) and \(\textrm{det}\ P_2\).
Proof
On the one hand, if \(\textrm{det}\ P_1\) has the purely imaginary zero \(\lambda _l={ i}\eta _l\ (\eta _l>0)\), then \(-\lambda ^*_l=\lambda _l\). In this situation, we have \(\alpha _l=\beta _l\), and thus, (2.13) becomes \(|\alpha _l|^2=-\textrm{e}^{2\eta _lx_0}\) which is a contradiction with \(|\alpha _l|^2> 0\) since \(\alpha _l\ne 0\). On the other hand, if \(\textrm{det}\ P_2\) has the purely imaginary zero \(\hat{\lambda }_l={ i}\hat{\eta }_l\ (\hat{\eta }_l<0)\), then \(-\hat{\lambda }^*_l=\hat{\lambda }_l\). Consequently, we have \(\hat{\alpha }_l=\hat{\beta }_l\). Thus, (2.14) would be \(|\hat{\alpha }_l|^2=-\textrm{e}^{-2\hat{\eta }_lx_0}\) which is a contradiction with \(|\hat{\alpha }_l|^2>0\) since \(\hat{\alpha }_l\ne 0\). \(\square \)
2.3 Soliton solutions
In what follows, we shall derive soliton solutions for the defocusing shifted nonlocal NLS Eq. (1.5) under general initial conditions. To this end, we assume that \(\textrm{det}\ P_1(\lambda )\) has N pairs of zeros \((\lambda _j, \lambda _{N+j})\) in \({\mathbb {C}}^+\) with \(\lambda _{N+j}=-\lambda ^*_j\) and \(\lambda _j\) being not purely imaginary, while \(\textrm{det}\ P_2(\lambda )\) has N pairs of zeros \((\hat{\lambda }_j, \hat{\lambda }_{N+j})\) in \({\mathbb {C}}^-\) with \(\hat{\lambda }_{N+j}=-\hat{\lambda }^*_j\) and \(\hat{\lambda }_j\) being not purely imaginary. Now, inspired by the restrictions in (2.13)–(2.14), we assume that the kernels of \(\textrm{det}\ P_1(\lambda _j)\) and \(\textrm{det}\ P_2(\hat{\lambda }_j)\) are spanned by the column vectors \(v_j\) and the row vectors \(\hat{v}_j\), respectively, i.e., \(P_1(\lambda _j)v_j=0\) and \(\hat{v}_j P_2(\hat{\lambda }_j)=0\), where
in which \(\theta _j=\theta _j(x,t)={i}\lambda _jx+2{ i}\lambda ^2_jt,\ \hat{\theta }_j =\hat{\theta }_j(x,t)=-{ i}\hat{\lambda }_jx-2{ i}\hat{\lambda }^2_jt\), and
where \(\lambda _j\in {\mathbb {C}}^+\) and \(\hat{\lambda }_j\in {\mathbb {C}}^-\) are free complex-valued parameters.
Using the prescribed conditions (2.15)–(2.17) of the scattering data, we can explicitly solve the RH problem (2.4) in the reflectionless case, i.e., \(s_{12}(0,\lambda )=r_{21}(0,\lambda )\), as
where \(M=(m_{kj})_{2N\times 2N}\) with \(m_{kj}=\frac{\hat{v}_kv_j}{\lambda _j-\hat{\lambda }_k}\). Moreover, \(P_1(\lambda )\) satisfies
where \(\bar{Q}=-{ i}[\sigma _3,P_1^{(1)}]\) with \(P_1^{(1)}=P_1^{(1)}(x,t)\) being determined by
Now we shall prove that \(\bar{Q}=(\bar{Q}_{kj})_{2\times 2} =-{i}[\sigma _3,P_1^{(1)}]\) keeps the same matrix structure of Q as in the original Lax pair (2.3) such that the system (2.19) also constitutes a Lax pair for the defocusing shifted nonlocal NLS Eq. (1.5). This means that we have to prove that
with \((P^{(1)}_1)_{kl}\) denoting the (k, l)-entry of \(P^{(1)}_1\) which is determined in (2.20). In fact, it is not difficult to check that \(P_1(\lambda )\) given in (2.18) satisfies the symmetry relation:
where \(\sigma =\left( \begin{array}{cc} 0&{}1\\ -1&{}0 \end{array}\right) \). Then, we obtain from the expansion (2.20) as well as (2.22) that
Using the relation (2.23), one can easily check that the desired relation (2.21) holds. Consequently, the system (2.19) indeed defines a Lax pair for the defocusing shifted nonlocal NLS Eq. (1.5). As a result,
yields a soliton solution of the defocusing shifted nonlocal NLS Eq. (1.5). To write out the soliton solutions (2.24) explicitly, we get from the form of \(P_1(\lambda )\) in (2.18) and its expansion (2.20), that the matrix function \(P^{(1)}_1\) can be found as
Then, substituting (2.25) into (2.24), we finally obtain an explicit 2N-soliton solution of the defocusing shifted nonlocal NLS Eq. (1.5) as
where \(M=(m_{kj})_{2N\times 2N}\) with \(m_{kj}=\frac{\hat{v}_kv_j}{\lambda _j-\hat{\lambda }_k}\) in which \(\hat{v}_k\) and \(v_j\) take the expressions in (2.15).
Remark 1
The representation (2.26) is said to be a 2N-soliton solution since \(\textrm{det}\ P_1\) and \(\textrm{det}\ P_2\) possess 2N zeros, respectively. That is to say, the soliton solutions expressed as (2.26) are in even orders. This is remarkably different compared with the focusing shifted nonlocal NLS Eq. (1.4). In fact, as aforementioned, the zeros of the RH problem of the defocusing shifted nonlocal NLS Eq. (1.5) cannot be allow for purely imaginary ones, while those of its focusing counterpart (1.4) do can [22].
2.4 Dynamical behaviors
Note that the form of the 2N-soliton solution (2.26) is not obvious to analyze its underlying dynamical behaviors. To reveal the properties of the 2N-soliton solution (2.26), we first rewrite it in an equivalent form, i.e., a ratio of two determinants:
where \(\hat{\theta }_k=-{i}\hat{\lambda }_k x-2{ i}\hat{\lambda }^2_kt,\theta _j= { i}\lambda _j x+2 { i}\lambda ^2_jt\), \(\lambda _{N+j}=-\lambda ^*_j\), \(\hat{\lambda }_{N+j}=-\hat{\lambda }^*_j\), and \(m_{kj}=\frac{\hat{v}_kv_j}{\lambda _j-\hat{\lambda }_k}\) with \(\hat{v}_k, v_j\) given in (2.15).



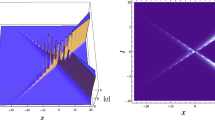
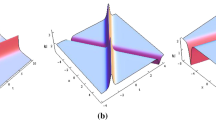
Two-soliton behaviors via (2.27) with \(N=1\) and (2.30). a analytic exponentially-growing or decaying two-soliton behavior with \(x_0=-5\), b analytic exponentially-growing or decaying two-soliton behavior with \(x_0=0\), c analytic exponentially-growing or decaying two-soliton behavior with \(x_0=5\)
In order to explore the 2N-soliton solution (2.27), we take \(N=1\) as an representative example, which corresponds to a two-soliton solution for the defocusing shifted nonlocal NLS Eq. (1.5). According to the spectral structure revealed in (2.15)–(2.17), we investigate the soliton dynamical behaviors underlying (2.27) by selecting the following lists of parameters:


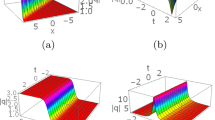
In fact, the parameters in (2.28)–(2.30) respectively satisfy: (I) \(\textrm{Re}\ \lambda _1\ne \textrm{Re}\ \hat{\lambda }_1\) and \(\textrm{Im}\ \lambda _1\ne -\textrm{Im}\ \hat{\lambda }_1\), (II) \(\textrm{Re}\ \lambda _1=\textrm{Re}\ \hat{\lambda }_1\) and \(\textrm{Im}\ \lambda _1\ne -\textrm{Im}\ \hat{\lambda }_1\), (III) \(\textrm{Re}\ \lambda _1\ne \textrm{Re}\ \hat{\lambda }_1\) and \(\textrm{Im}\ \lambda _1=-\textrm{Im}\ \hat{\lambda }_1\). Corresponding to (2.28) and (2.29), the two-soliton solutions are singular periodic solitons that collapse repeatedly which are shown in Figures 1 and 2. It is demonstrated in Fig. 1a-c that each right-propagation collapsing soliton decreases in its amplitude, while each left-propagation collapsing soliton increases in its amplitude. In contrast, in Fig. 2a–c, each right-propagation collapsing soliton increases in its amplitude, while each left-propagation collapsing soliton decreases in its amplitude. Remarkably different from the singular profiles in Figs. 1 and 2, the two-soliton interactions corresponding to (2.30) are analytic exponentially-growing or decaying types which are clearly shown in Fig. 3. Obviously, the two-soliton interactions revealed in Figs. 1, 2 and 3 have the properties that the two individual solitons change their forms before and after their interactions. That is to say, the two-soliton collisions are non-regular for the parameters in (2.28)–(2.30). Comparatively, the parameters in (2.31)–(2.32) obey the conditions: \(\textrm{Re}\ \lambda _1=\textrm{Re}\ \hat{\lambda }_1\) and \(\textrm{Im}\ \lambda _1=-\textrm{Im}\ \hat{\lambda }_1\). The difference for (2.31) and (2.32) lies in the different selections of \(\hat{\alpha }_1\). Consequently, the two-soliton solutions for (2.31)–(2.32) evolve as Figs. 4 and 5, which are all regular since the individual solitons do not change their respective forms before and after the collisions. However, due to the different choices of \(\hat{\alpha }_1\), the two-soliton solutions in Fig. 4 are singular bell types, while those in Fig. 5 are analytic bell types. Regarding the role that the space-shifted parameter \(x_0\) plays in the two-soliton solutions corresponding to (2.28)–(2.32), we highlight that the space-shifted parameter \(x_0\) affects the interaction positions which can be clearly seen in Figs. 1, 2, 3, 4 and 5 where \(x_0\) is selected as \(x_0=-5, 0, 5\), respectively.
3 Conclusions
By extending the RH approach to the defocusing shifted nonlocal NLS Eq. (1.5), we have explored and revealed the spectral structure of the equation, i.e., the scattering data and the their corresponding symmetry relations. Then soliton solutions in even orders are rigorously derived for the defocusing shifted nonlocal NLS Eq. (1.5). We showed that the zeros of the RH problem of the defocusing shifted nonlocal NLS Eq. (1.5) do not allow for purely imaginary ones, which is different from the focusing shifted nonlocal NLS Eq. (1.4) [22]. Finally, by selecting five representative lists of parameters, we explored the dynamical properties underlying the obtained solitons and then graphically illustrated them by highlighting the role that the space-shifted parameter \(x_0\) plays. The graphical illustrations show that the defocusing shifted nonlocal NLS Eq. (1.5) possesses diverse soliton dynamical behaviors which stem from its particular spectral structure revealed in (2.15)–(2.17). Before ending this paper, we point out that it is also meaningful to investigate the long-time behaviors of the solutions of (1.5) by performing asymptotic analysis of the corresponding RH problem (2.4) by utilizing the Deift-Zhou method [43, 44]. In addition, it is also possible to study other aspects of the defocusing shifted nonlocal NLS Eq. (1.5), such as the bright or dark soliton solutions [45,46,47], the neural network-based symbol calculation method [48,49,50], the Painlevé integrability properties [51, 52], and others. These are left for future discussions.
Data Availability
Not applicable.
References
Ablowitz, M.J., Prinari, B., Trubatch, A.: Discrete and Continuous Nonlinear Schrödinger Systems. Cambridge University Press, Cambridge (2004)
Zakharov, V.E., Shabat, A.B.: Exact theory of two-dimensional self-focusing and one-dimensional self-modulation of waves in nonlinear media. Sov. Phys. JETP 34, 62 (1972)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Bender, C.M., Boettcher, S.: Real spectra in non-Hermitian Hamiltonians having \({\cal{P} }{\cal{T} }\) symmetry. Phys. Rev. Lett. 80, 5243 (1998)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal asymptotic reductions of physically significant nonlinear equations. J. Phys. A Math. Theor. 52, 15LT02 (2019)
Gadzhimuradov, T.A., Agalarov, A.M.: Towards a gauge-equivalent magnetic structure of the nonlocal nonlinear Schrödinger equation. Phys. Rev. A 93, 062124 (2016)
Ma, L.Y., Zhu, Z.N.: Nonlocal nonlinear Schrödinger equation and its discrete version: soliton solutions and gauge equivalence. J. Math. Phys. 57, 083507 (2016)
Ablowitz, M.J., Musslimani, Z.H.: Inverse scattering transform for the integrable nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 915 (2016)
Ablowitz, M.J., Luo, X.D., Musslimani, Z.H.: Inverse scattering transform for the nonlocal nonlinear Schrödinger equation with nonzero boundary conditions. J. Math. Phys. 59, 011501 (2018)
Yang, J.K.: General \(N\)-solitons and their dynamics in several nonlocal nonlinear Schrödinger equations. Phys. Lett. A 383, 328 (2019)
Yang, B., Chen, Y.: Dynamics of high-order solitons in the nonlocal nonlinear Schrödinger equations. Nonlinear Dyn. 94, 489 (2018)
Huang, X., Ling, L.M.: Soliton solutions for the nonlocal nonlinear Schrodinger equation. Eur. Phys. J. Plus 131, 148 (2016)
Stalin, S., Senthilvelan, M., Lakshmanan, M.: Nonstandard bilinearization of \({\cal{P} }{\cal{T} }\)-invariant nonlocal nonlinear Schrödinger equation: Bright soliton solutions. Phys. Lett. A 381, 2380 (2017)
Feng, B.F., Luo, X.D., Ablowitz, M.J., Musslimani, Z.H.: General soliton solution to a nonlocal nonlinear Schrödinger equation with zero and nonzero boundary conditions. Nonlinearity 31, 5385 (2018)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear equations. Stud. Appl. Math. 139, 7 (2017)
Yang, J.K.: Physically significant nonlocal nonlinear Schrödinger equation and its soliton solutions. Phys. Rev. E 98, 042202 (2018)
Ablowitz, M.J., Luo, X.D., Musslimani, Z.H., Zhu, Y.: Integrable nonlocal derivative nonlinear Schrödinger equations. Inverse Probl. 38, 065003 (2022)
Gürses, M., Pekcan, A.: Multi-component AKNS systems. Wave Motion 117, 103104 (2023)
Lou, S.Y.: Alice-Bob systems, \(\hat{P}-\hat{T}-\hat{C}\)-symmetry invariant and symmetry breaking soliton solutions. J. Math. Phys. 59, 083507 (2018)
Yan, Z.Y.: Nonlocal general vector nonlinear Schrödinger equations: integrability, \({\cal{P} }{\cal{T} }\) symmetribility, and solutions. Appl. Math. Lett. 62, 101 (2016)
Song, C.Q., Xiao, D.M., Zhu, Z.N.: Reverse space-time nonlocal Sasa-Satsuma equation and its solutions. J. Phys. Soc. Jpn. 86, 054001 (2017)
Ablowitz, M.J., Musslimani, Z.H.: Integrable space-time shifted nonlocal nonlinear equations. Phys. Lett. A 409, 127516 (2021)
Wang, X., Wei, J.: Three types of Darboux transformation and general soliton solutions for the space-shifted nonlocal PT symmetric nonlinear Schrödinger equation. Appl. Math. Lett. 130, 107998 (2022)
Liu, S.M., Wang, J., Zhang, D.J.: Solutions to integrable space-time shifted nonlocal equations. Rep. Math. Phys. 89, 199 (2022)
Gürses, M., Pekcan, A.: Soliton solutions of the shifted nonlocal NLS and MKdV equations. Phys. Lett. A 422, 127793 (2022)
Wu, J.P.: A direct reduction approach for a shifted nonlocal nonlinear Schrödinger equation to obtain its \(N\)-soliton solution. Nonlinear Dyn. 108, 4021 (2022)
Zhou, F., Rao, J.G., Mihalanche, D., He, J.S.: Multiple double-pole solitons and multiple negaton-type soitons in the space-shifted nonlocal nonlinear Schrödinger equation. Appl. Math. Lett. 146, 108796 (2023)
Wu, J.P.: Riemann-Hilbert approach and nonlinear dynamics in the nonlocal defocusing nonlinear Schrödinger equation. Eur. Phys. J. Plus. 135, 523 (2020)
Yang, J.K.: Nonlinear Waves in Integrable and Nonintegrable Systems. SIAM, Philadelphia (2010)
Wang, D.S., Zhang, D.J., Yang, J.K.: Integrable propertities of the general coupled nonlinear Schrödinger equations. J. Math. Phys. 51, 023510 (2010)
Geng, X.G., Wu, J.P.: Riemann-Hilbert approach and \(N\)-soliton solutions for a generalized Sasa-Satsuma equation. Wave Motion 60, 62 (2016)
Ma, W.X., Huang, Y.H., Wang, F.D.: Inverse scattering transforms and soliton solutions of nonlocal reverse-space nonlinear Schrödinger hierarchies. Stud. Appl. Math. 145, 563 (2020)
Zhao, P., Fan, E.G.: A Riemann-Hilbert method to algebro-geometric solutions of the Korteweg-de Vries equation. Physica D 454, 133879 (2023)
Hu, B.B., Shen, Z.Y., Zhang, L., Fang, F.: Riemann-Hilbert approach to the focusing and defocusing nonlocal derivative nonlinear Schrödinger equation with step-like initial data. Appl. Math. Lett. 148, 108885 (2024)
Liu, Y.Q., Zhang, W.X., Ma, W.X.: Riemann-Hilbert problems and soliton solutions for a generalized coupled Sasa-Satsuma equation. Commun. Nonlinear Sci. Numer. Simul. 118, 107052 (2023)
Ma, X.X., Zhu, J.Y.: Riemann-Hilbert problem and and \(N\)-soliton solutions for the \(n\)-component derivative nonlinear Schrödinger equations. Commun. Nonlinear Sci. Numer. Simul. 120, 107147 (2023)
Wu, J.P.: Spectral structures and soliton dynamical behaviors of two shifted nonlocal NLS equations via a novel Riemann-Hilbert approach: A reverse-time NLS equation and a reverse-spacetime NLS equation. Chaos, Solitons and Fractals 181, 114640 (2024)
Wu, J.P.: Riemann-Hilbert approach and soliton classification for a nonlocal integrable nonlinear Schrödinger equation of reverse-time type. Nonlinear Dyn. 107, 1127 (2022)
Wu, J.P.: A novel Riemann-Hilbert approach via \(t\)-part spectral analysis for a physically significant nonlocal integrable nonlinear Schrödinger equation. Nonlinearity 36, 2021 (2023)
Wu, J.P.: A novel general nonlocal reverse-time nonlinear Schrödinger equation and its soliton solutions by Riemann-Hilbert method. Nonlinear Dyn. 111, 16367 (2023)
Wu, J.P.: A new physically meaningful general nonlocal reverse-space nonlinear Schrödinger equation and its novel Riemann-Hilbert method via temporal-part spectral analysis for deriving soliton solutions. Nonlinear Dyn. 112, 561 (2024)
Wu, J.P.: Riemann-Hilbert approach and soliton analysis of a novel nonlocal reverse-time nonlinear Schrödinger equation. Nonlinear Dyn. 112, 4749 (2024)
Deift, P., Zhou, X.: A steepest descent method for oscillatory Riemann-Hilbert problems. Asymptotics for the MKdV equation. Ann. Math. 137, 295 (1993)
Geng, X.G., Wang, K.D., Chen, M.M.: Long-time asymptotics for the Spin-1 Gross-Pitaevskii equation. Commun. Math. Phys. 382, 585 (2021)
Wazwaz, A.M., Hammad, M.A.: Bright and dark optical solitons for (3+1)-dimensional hyperbolic nonlinear Schrödinger equation using a variety of distinct schemes. Optik 270, 170043 (2022)
Kaur, L., Wazwaz, A.M.: Optical soliton solutions of variable coefficient Biswas-Milovic (BM) model comprising Kerr and damping effect. Optik 266, 169617 (2022)
Zhang, R.F., Li, M.C., Cherraf, A., Reddy, S.: The interference wave and the bright and dark soliton for two integro-differential equation by using BINM. Nonlinear Dyn. 111, 8637 (2023)
Zhang, R.F., Bilige, S.: Bilinear neural network method to obtain the exact analytical solutions of nonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 95, 3041 (2009)
Zhang, R.F., Li, M.C., Gan, J.Y., Li, Q., Lan, Z.Z.: Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos, Solitons and Fractals 154, 111692 (2022)
Zhang, R.F., Li, M.C.: Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 108, 521 (2022)
Wazwaz, A.M.: New (3+1)-dimensional Painlevé integrable fifth-order equation with third-order temporal dispersion. Nonlinear Dyn. 106, 891 (2021)
Wazwaz, A.M.: Painlevé integrability and lump solutions for two extended (3+1)-dimensional (2+1)-dimensional Kadomesev-Petviashvili equations. Nonlinear Dyn. 111, 3623 (2022)
Acknowledgements
The author expresses sincere thanks to the editor and the anonymous referees for their valuable suggestions.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wu, J. Spectral structure and even-order soliton solutions of a defocusing shifted nonlocal NLS equation via Riemann-Hilbert approach. Nonlinear Dyn 112, 7395–7404 (2024). https://doi.org/10.1007/s11071-024-09414-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09414-0