
Abstract
An adjustable quantized approach is adopted to treat the \(\mathcal {H}_{\infty }\) sliding mode control of Markov jump systems with general transition probabilities. To solve this problem, an integral sliding mode surface is constructed by an observer with the quantized output measurement and a new bound is developed to bridge the relationship between system output and its quantization. Nonlinearities incurred by controller synthesis and general transition probabilities are handled by separation strategies. With the help of these measurements, linear matrix inequalities-based conditions are established to ensure the stochastic stability of the sliding motion and meet the required \(\mathcal {H}_{\infty }\) performance level. An example of single-link robot arm system is simulated at last to demonstrate the validity.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, much research effort has been devoted into Markov jump systems (MJSs) due to theirs’ well prospective applications in economic systems, flight control systems and robot systems [1]. Transition probabilities (TPs) which dominate the system behavior in the jumping process, in most studies, are required to be known [2,3,4,5,6,7,8,9,10,11,12]. Unfortunately, it is impossible to get TPs precisely owing to environment factors, instrument errors and measure costs [13]. Hence, in the viewpoint of engineering, TPs allowed to be partial known are investigated in [14,15,16,17] by means of robust methodologies, Gaussian transition probability density function and Kronecker product technique, respectively.
Alternatively, sliding mode control (SMC) is an effective method to eliminate impact of uncertainty and has advantages of fast response and robustness [18, 19]. Regarding the sliding mode technique to cope with uncertain MJSs [20], proposes a linear matrix inequality solution to the existence of linear sliding surfaces. This result is extended by [21] where an integral sliding mode surface is developed for singular MJSs. In [22], a dynamic sliding surface relying on system states and inputs is developed for descriptor MJSs. Wei et al. [23] utilized a descriptor system setup to treat the sliding mode output control of semi-MJSs. Contrast to the above results with ideal TPs, [24] constructs an integral sliding mode control approach for stochastic MJSs with incomplete TPs. In this result, the sliding mode controller depends on the accessability of partly known TPs. Along this line, robust sliding mode synthesis of MJSs with time delay is addressed in [25] where TPs are known, uncertain but time varying, and unknown.
Noticeably, the above results are almost assumed that system outputs are transmitted via analog channels. To be consistent with digital channels in network environment, signal quantization is necessary [26]. Although the quantization could improve the transmission efficiency, it could cause nonlinearities which degenerate system performance or even destroy system stability [27,28,29,30,31]. Therefore, the investigation on MJSs with quantization has been conducted in [32,33,34,35]. To be specific [32], adopts the non-conservative sector bound approach to cope with the logarithmic quantized state feedback control of MJSs. Rasool and Nguang [33] treats the network delay as a finite state Markov process and utilizes a logarithmic quantization strategy to tackle the quantized robust \(\mathcal {H}_\infty \) control problem. Via augmenting the quantization error into system vector [34], converts the quantized fault-tolerant control of MJSs into the sliding mode control of a description system. In contrast to above results with known TPs, quantized output \(\mathcal {H}_\infty \) filtering of MJSs with known, uncertain and unknown TPs is built in [35]. While these quantized results have enriched the investigation on MJSs, the quantizer is nonuniform and requires infinite quantization levels around the equilibrium.
To propose a feasible solution, this paper is dedicated to the \(\mathcal {H}_{\infty }\) sliding mode control of MJSs with adjustable quantized parameter. TPs cover known, uncertain and unknown. Based on the quantized system output, an observer-based integral sliding mode surface is developed and the relationship between system output and the quantized parameter is built by a technique lemma explicitly. Separation techniques are utilized to cope with the nonlinearities caused by controller synthesis and general TPs. A mode-dependent sliding mode controller is developed via the known TPs information to ensure the sliding reachability. Synthesis conditions for observer and controller gains with the required disturbance attenuation performance level \(\gamma \) are solved in a unified framework. A single-link robot arm (SRA) system is simulated to show the validity of the proposed method.
The subsequent paper architecture is: some preliminaries are supplied in Sect. 2. In Sect. 3, an integral sliding mode surface based on the quantized system outputs and a sliding mode quantized controller are presented. Then, separation strategies are introduced to linearize the nonlinearities induced by quantization and incomplete TPs. A simulation is carried out in Sect. 4. Section 5 concludes this paper.
1.1 Notation
The transpose of H is presented by \(H^{\mathrm{T}}\). The positive (negative) definite of H is shortened as \(H>0 (H<0)\). \(|x |\) and \(|H |\) denote the 1-norm of the vector x and matrix H, respectively. Similarly, \(||x ||\) and \(||H ||\) denote 2-norm. \(\mathcal {L}_2\) denotes the space of square integrable vector functions over \( \left[ {0,\infty } \right) \) with \(\varepsilon \left\{ {{{\left\| x \right\| }^2}} \right\} < \infty \). Finally, the symbol He(X) is used to represent \(\left( X + X^{\mathrm{T}}\right) \).
2 Problem statement and preliminaries
Consider Markov jump systems with the following evolution
where \(x(t)\in \mathbb {R}^n\) is the system state vector, \(\omega (t)\in \mathbb {R}^r\) is energy bounded disturbance belonging to \(\mathcal {L}_2\). \(u(t)\in \mathbb {R}^m\) is control input, y(t) is measured output and z(t) is the regulated output. \( \tilde{A}(r(t))=M(r(t))E(t)N(r(t))\) where M(r(t)), N(r(t)) are known and \(E(t)^{\mathrm{T}}E(t)\le I\). r(t) is continuous-time Markov process in a finite space \(\mathcal {I}=\{1,2,\ldots ,N\}\) and satisfies
where \(h>0\), \(\lambda _{ij}\geqslant 0\) for \(i\ne j\) and \(\lambda _{ii}=-\sum \nolimits ^{N}_{j=1,j\ne i}\lambda _{ij}\) for each mode i, \(\lim \nolimits _{h\rightarrow 0}o(h)/h=0\).
Considering the fact that TPs may be known, uncertain and unknown [14, 36], the incomplete TP matrix with four operation modes is presented below
where \(\bar{\lambda }_{ij}=\lambda _{ij}+\varphi _{ij}\), \(\lambda _{ij}\) denotes known elements, \(\varphi _{ij}\left( \varphi _{ij} \in \left[ -\,\delta _{ij},\delta _{ij}\right] \right) \) represents uncertain estimate error with known upper and lower bound and “?” is unknown. Furthermore, \(\mathcal {I}_k^i\) is used to denote the set of known and uncertain TPs in ith row, while \(\mathcal {I}_{uk}^i\) represents the set of unknown ones. For convenience, let \(\hat{\lambda }_{ij}\) includes all possible cases (known, uncertain and unknown).
For the fluency of the derivative, some preliminaries of assumption, definition and lemma are given below:
Assumption 1
[36] \(\omega (t)\) satisfies the following boundary d (\(d>0\))
Definition 1
[2] The autonomous system (1) is stochastically stable (SS), if the following inequality holds:
under initial conditions \(x_0\) and \(r_0\),
Definition 2
[2] Given \(\gamma >0\) and \(x_0=0\), the system (1) meets the required \(\mathcal {H}_\infty \) level \(\gamma \) if
holds for all nonzero \(\omega (t) \in \mathcal {L}_2\).
Lemma 1
[37] The following inequality holds, for \(F(t)^{\mathrm{T}}F(t)\le I\),
where \(\varepsilon >0\).
Lemma 2
[37] Let \(\upsilon \in {\mathcal {R}^n}\), \(\mathcal {P} = {\mathcal {P}^{\mathrm{T}}} \in {\mathcal {R}^{n \times n}}\) and \(rank(\mathcal {H})=r<n\) (\(\mathcal {H} \in \mathcal {R}^{m\times n}\)), then equivalent statements are given below:
-
1.
\(\upsilon ^{\mathrm{T}}\mathcal {P}\upsilon \), for all \(\upsilon \ne 0\), \(\mathcal {H}\upsilon =0\);
-
2.
\(\mathcal {H}^{\bot T}\mathcal {P}\mathcal {H}^{\bot } < 0\);
-
3.
\(\exists \mathcal {X}\in \mathcal {R}^{n \times m}\) such that \(\mathcal {P}+He(\mathcal {XH})<0\).
For \(r(t)=i\in \mathcal {I}\), system matrices in the ith mode are simplified as \(A_i\), \(\tilde{A}_i\), \(B_{1i}\), \(B_{2i}\), \(C_{i}\), \(C_{di}\), \(M_{i}\) and \(N_{i}\).
As in [28], the dynamical uniform quantizer is given as follows:
where \(\mu (t)\) is the quantizer parameter.
Choosing the quantization error \({e_\mu (t) }\) as \({e_\mu (t) } = {q_\mu }(\alpha ) - \alpha \) gives
where \(\varDelta =\frac{\sqrt{p} }{2}\) and p is the dimension of \(\alpha \).
Lemma 3
For a positive constant \(\beta >1\), if the quantizer parameter \(\mu >0\) satisfies
then the following inequalities
holds.
Proof
Based on (8) and the result given in [28], the proof is completed. \(\square \)
Remark 1
Since the integral sliding mode surface is constructed by an observed state, the quantized parameter \(\mu (t)\) is determined by system output. Although this lemma is an extension of [28], it could render a more tighter bound to \(e_{\mu (t)}\).

The structure of control system
3 Main results
3.1 Observer-based sliding manifold design
Consider the following integral sliding manifold
where \(X_i\) is a matrix variable to be designed and \(\hat{x}(t)\) is the observer state as below
where \(L_i\) is to be designed.
Remark 2
The choice of \(B_{1i}L_i\) facilitates the sliding mode reachability analysis which will be shown in the following derivation. Although this form has been adopted in [38], the observer gain matrix \(L_i\) should be given beforehand and no quantization has been considered.
To facilitate the controller construction in the following, Fig. 1 is given below.
For simplification, \({s}(\hat{x}(t))\) is abbreviated by s. Then the differential of \({s}_i\) is achieved from (11):
3.2 SMC design
In the following theorem, the sliding motion to the specified integral sliding surface \( s=0\) is ensured in finite time by exploiting a proper controller.
Theorem 1
Consider systems (1) with the sliding mode functions (13). With the SMC law designed as (14), (15), (16), the state trajectories are driven onto \(s=0\) in finite time and will keep on it.
where
Proof
Choose the candidate Lyapunov functional as
where \(\bar{X}_i=\left( B_{1i}^{\mathrm{T}}X_iB_{1i}\right) ^{-1}\).
Calculating the differential of (17) with (13) yields
Taking the controller (14)–(16) into (18) gives
Since \({\hat{\lambda } _{ij}}\) is incomplete, according to the accessibility of diagonal elements, two cases are discussed as below to ensure the negative definiteness of \(\dot{V}_{1i}\).
Case I \(\left( i\in \mathcal {I}_{k}^i\right) \):
Use the property \(\sum \nolimits _{l \in {I_{uk}^i}}^N {{\hat{\lambda } _{il}}} \mathrm{{ + }}\sum \nolimits _{j \in {I_k^i}}^N {{\hat{\lambda } _{ij}}} = 0\), one has the following fact
Resorting to \(\frac{{\sum \nolimits _{l \in {I_{uk}^i}}^N {{\hat{\lambda } _{il}}} }}{{ - \sum \nolimits _{j \in {I_k^i}}^N {{\hat{\lambda } _{ij}}} }}=1\), one further has
Consequently, taking (21) into (19) supplies
To get \(\dot{V}_{1i}<0\), a direct way is to ensure the following terms from (22) satisfying
Resorting to norm calculation, the left-hand side of (23) is scaled as
Applying the fact that \(\left| {s} \right| \ge \left\| {s} \right\| \), (23) holds when \(\rho _i\) satisfies
Since \({\sum \nolimits _{j \in {I_k^i}}^N {{\hat{\lambda } _{ij}}\left( { {{{\bar{X}}_j}} - {{{\bar{X}}_l}} } \right) } }\) include uncertain TPs \(\bar{\lambda }_{ij}\), with the help of Lemma 1, it is disposed as below
Substituting (26) into (25) produces
As a result, in this case, \( {\rho _i} \) should meet
which is the condition in (14)–(16).
Case II (\(i\in \mathcal {I}_{uk}^i\)):
Utilizing the property (2) as \( {\hat{\lambda }_{ii}}\) \(= - \sum \nolimits _{j \in {I_k^i}}^N {{\hat{\lambda }_{ij}}} - \sum \nolimits _{l \in {I_{uk}^i}}^N {{\hat{\lambda }_{il}}} \) and taking it into (21) gives
Let \(\bar{X}_j\), \(\bar{X}_l\) satisfy \( {{{\bar{X}}_l}} < {{{\bar{X}}_j}} \), then it leads to:
With respect to uncertain TPs, \(\sum \nolimits _{j=1}^N{\bar{\lambda }_{ij} {\bar{X}_j} } \) has the property as follows.
In a similar way, \(\sum \nolimits _{j = 1}^N {{\hat{\lambda } _{ij}} {{{\bar{X}}_j}} } \) is substituted by (30) and \(\rho _i\) is required to satisfy
which is presented in (14)–(16). \(\square \)
Remark 3
Due to the sign function, the sliding mode controller could render the chattering problem. To avoid this phenomenon, \(-\rho _i \mathrm{sign}(s)\) is substituted by \(-\rho \frac{s}{\left\| {s}\right\| +\iota }\), \((\iota >0)\) in the simulation part.
Remark 4
In [39], system states are premised to be available and the integral sliding mode surface is quantized. However, in this paper, the surface is built on the quantized system output at controller side. Moreover, the distinction of this paper and [38] is that the incomplete TPs in the former cover the cases in the latter.
3.3 Adjustment policy for \(\mu (t)\)
In this section, similar to [31], an adjustment policy of parameter \(\mu (t)\) in the quantizer is proposed as follows.
Initialization:
Choose \(\mu (t_0)\) as an arbitrary positive constant and set \(\mu (t)=\mu (t_0)\);
Adjustment steps:
If \(|y(t)|\ge 1\), \(\mu (t)\) is taken as \(\mu (t)=\frac{\lfloor |y(t)| \rfloor }{(\beta +1)\varDelta }\), where the notation \(\lfloor y\rfloor \) denotes the function \(\hbox {floor}(\cdot )\) which rounds the elements of y(t) to the nearest integers less than or equal to y(t).
If \(0<|y(t)|<1\), take \(\alpha (0<\alpha <1)\) as a fixed positive constant, there always exists a positive integer i such that \(\alpha ^i \le |y(t)| < \alpha ^(i-1)\); then, we take \(\mu (t)=\frac{\alpha ^i}{(\beta +1)\varDelta }\).
If \(|y(t)|=0\), which means the sliding surface is arrived, then we take \(\mu (t)=0\).
3.4 Stability analysis
The subsequent work pays attention to the stability of the closed-loop systems with the controller composed of (14)–(16). Since the designed sliding mode surface is proved to be accessible, a sliding motion is happened on the surface in a finite time. Then, the system stability is analyzed through \(\hat{x}(t)\) and e(t).
Taking into account \(s=0,\dot{s}=0\), the equivalent control law is given as follows:
Subsequently, the state trajectory under (32) is described as
Setting \(e(t)={x}(t)-\hat{x}(t)\) yields
To get the controller and observer gains, sufficient conditions for SS with the required \(\mathcal {H}_\infty \) performance are established Theorem 2.
Theorem 2
For given scalars \(\tau _{1i}\),\(\tau _{2i}\),\(\upsilon _{1i}\),\(\upsilon _{2i}\),\(\upsilon _{3i}\), \(\upsilon _{4i}\), if there exist symmetrical matrices \(X_i,{T}_{ij}>0\) and matrices \(U_{i},V_{i},W_{i},Y_{i}\) and positive scalars \(\varepsilon _{1i},\varepsilon _{2i} (i \in \mathbf {I})\) such that the following inequalities hold:
where
the controller (14) renders the system (1) to be SS with the \(\mathcal {H}_{\infty }\) index \(\gamma \). Moreover, \(K_i =U_i^{ - 1}{W_i}\) and \(L_i =-\,V_i^{ - 1}Y_i\).
Proof
The candidate Lyapunov function is chosen as:
where \(X_i>0\). Calculating \(\dot{V}_{2i}\) yields
Substituting (33)–(38) renders
Utilizing Lemma 1, the following inequality holds from (39):
Integrating \(z^{\mathrm{T}}(t)z(t) - \gamma ^2w^{\mathrm{T}}(t)w(t)\) into (40), one has the inequality (41).
To deal with \(2{e^{\mathrm{T}}}(t){X_i}{B_{1i}}{L_i}e_{\mu }(t) \), applying Lemma 3 gives
Substituting (42) into (41) yields
where
To ensure the stochastic stability with the required \(\mathcal {H}_\infty \) performance, one just needs to prove \({\varXi _{i}}<0\). With the help of Schur complement to \(\varXi _{i}\), one obtains
where \(\bar{\varLambda }_{11} = He({X_i}({A_i} + {B_{1i}}{K_i})) + {\varepsilon _{2i}}N_i^{\mathrm{T}}{N_i}+ \sum \nolimits _{j = 1}^N {{\hat{\lambda }_{ij}}{X_j}}\), \(\bar{\varLambda }_{22} = He({X_i}({A_i} - {B_{1i}}{L_i}{C_i})) + {\varepsilon _{1i}}N_i^{\mathrm{T}}{N_i}+ \sum \nolimits _{j = 1}^N {{\hat{\lambda }_{ij}}{X_j}}\), and \(\bar{\varLambda }_{77} = -{(\beta +1)^2}I\).
To linearize \(X_iB_{1i}K_i\) and \(X_iB_{1i}L_iC_i\), by setting \(K_i =U_i^{ - 1}{W_i}\), \(L_i =-\,V_i^{ - 1}Y_i\), a separated approach in [36] is utilized as below
Alternatively, \(\varXi _i\) is equivalent to
where
Calculating the kernel space of \({\mathcal {H}^ \bot }\) gives
Combining (45), (46) and Lemma 2 , \(\varXi _i\) is rewritten as (48).
where
Along the similar line as Theorem 1 to handle general TPs, one gets that \(\sum \nolimits _{j = 1}^N {{\hat{\lambda } _{ij}}{X_j}}\) satisfies the following inequalities
Case I (\(i\in \mathcal {I}_{k}^i\)):
Case II (\(i\in \mathcal {I}_{uk}^i\)):
Taking (49) and (50) into (48) produces the fact \(\varXi _i<0\), respectively. \(\square \) \(\square \)
Remark 5
In the course of derivation, to make the obtained controller and observer synthesis conditions be solvable, Lemma 3 is utilized to deal with the nonlinear term \(e^{\mathrm{T}}_{\mu }(t)e_{\mu }(t)\). As a result, the established synthesis conditions are formulated by means of linear matrix inequalities.
4 Numerical simulation
The simulation is developed on a SRA system appeared in [40] to verify the proposed method.
The evolutionary of SRA system dynamic is
where \(\theta (t)\), \(\mathcal {M}\) and \(\mathcal {L}\) are the arm’s angle position, mass payload and length, respectively. u(t), w(t), J, \(\mathcal {D}(t)\) and g are the control input, external disturbance, inertia moment, the uncertain viscous friction coefficient and gravity acceleration. Moreover, \(g= 9.81\), \(\mathcal {L}=0.8\), and \(\mathcal {D}(t)=2\). As [40], linearizing (51) gives, for \(\mathcal {M}\) and J with four modes,
where \(x(t)=\left[ {\begin{array}{*{20}{c}}x_1(t)&x_2(t) \end{array}}\right] ^{\mathrm{T}}\), \(r(t)=\{1,2,3,4\}\), \(\tilde{A}(r(t),t)=M(r(t))E(t)N(r(t))\),\({D(1)} = -\, 0.1\), \({D(2)} = 0.3\),\({D(3)} = 0.5\),\({D(4)} = 0.2\), \(\mathcal {M}(r(t))\) and J(r(t)) change depending on the jump mode. \(J(1)=0.82\), \(J(2)=0.74\), \(J(3)=0.93\) and \(J(4)=0.89\) \((\mathcal {M}(r(t))=J(r(t)))\).
The matrices of parameter perturbation and disturbance are given as:
For initialization, the real and estimated state vectors are given as \(x = {\left[ {\begin{array}{*{20}{c}} 4&5 \end{array}} \right] ^{\mathrm{T}}}\), \(\hat{x} = {\left[ {\begin{array}{*{20}{c}} 0&0 \end{array}} \right] ^{\mathrm{T}}}\). Other parameters are selected as follows \(\theta =0.01;\iota =0.01;\tau _{1i}=1;\tau _{2i}=1; \upsilon _{1i}=1; \upsilon _{2i}=1 ; \upsilon _{3i}=1 ;\upsilon _{4i}=1; \eta _{ij}=1(i\in \{1,2,3,4\})\) and the parameters in quantizer \(\beta =4;\alpha =0.5\).
The general TP matrix is
where \(\varphi _{11}=\varphi _{33}=[-\,0.1,0.1]\).
Solving conditions (35) and (36) in Theorem 2 yields
Applying the proposed sliding mode controller, the response curves of system states, quantizer parameters, input, quantized output and measured output are given in Figs. 2, 3 and 4, respectively.

The curves of system states \(x_1(t),x_2(t)\)

The curve of u(t)

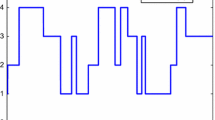
The curve of output \(q_{\mu }(y)\)

The response of the quantization parameter \(\mu \)
It is seen that system state trajectories are stochastically stable in Fig. 2. Figure 3 shows the variation of the mode-dependent sliding mode control input with the possible mode evolution. The system output y(t) and its corresponding quantized case are depicted in Fig. 4. Figure 5 tells the quantized range varied by the proposed quantization adjustable steps.
In summary, the validity of the proposed sliding mode control approach are shown in these figures.
5 Conclusions
The quantized sliding mode control of MJSs with incomplete TPs is investigated. An observer-based integral sliding mode surface is built on the quantized system output, and effective techniques are established to cope with the quantization nonlinearities, unknown and uncertain TPs. Linear matrix inequalities-based sufficient conditions are obtained to guarantee the sliding mode reachability and the required \(\mathcal {H}_\infty \) performance. The SRA system is employed to verify the proposed method.
References
Mariton, M.: Jump Linear Systems in Automatic Control. M. Dekker, New York (1990)
Revathi, V.M., Balasubramaniam, P., Park, J.H., Lee, T.H.: \({\cal{H}}_ {\infty }\) filtering for sample data systems with stochastic sampling and Markovian jumping parameters. Nonlinear Dyn. 78(2), 813–830 (2014)
Ramasamy, S., Nagamani, G., Zhu, Q.: Robust dissipativity and passivity analysis for discrete-time stochastic T–S fuzzy cohengrossberg Markovian jump neural networks with mixed time delays. Nonlinear Dyn. 85(4), 2777–2799 (2016)
Shen, H., Park, J.H., Wu, Z.: Finite-time synchronization control for uncertain Markov jump neural networks with input constraints. Nonlinear Dyn. 77(4), 1709–1720 (2014)
Samidurai, R., Manivannan, R., Ahn, C.K., Karimi, H.R.: New criteria for stability of generalized neural networks including Markov jump parameters and additive time delays. IEEE Trans. Syst. Man Cybern. Syst. (2016). https://doi.org/10.1109/TSMC.2016.2609147
Gonçalves, A.P.C., Fioravanti, A.R., Geromel, J.C.: Markov jump linear systems and filtering through network transmitted measurements. Sig. Process. 90(10), 2842–2850 (2010)
Saravanakumar, R., Ali, M.S., Ahn, C.K., Karimi, H.R., Shi, P.: Stability of Markovian jump generalized neural networks with interval time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. (2016). https://doi.org/10.1109/TNNLS.2016.2552491
Zhao, S., Ahn, C.K., Shmaily, Y.S., Shi, P., Agarwal, R.K.: An iterative filter with finite measurements for suddenly maneuvering targets. AIAA J. Guid. Control Dyn. 40, 2316–2322 (2017)
Mathiyalagan, K., Park, J.H., Sakthivel, R., Anthoni, S.M.: Robust mixed \(\cal{H}_\infty \) and passive filtering for networked Markov jump systems with impulses. Sig. Process. 101, 162–173 (2014)
Orey, S.: Markov chains with stochastically stationary transition probabilities. Ann. Probab. 19(3), 907–928 (1991)
Shen, M., Yan, S., Zhang, G., Park, J.H.: Finite-time \(\cal{H}_\infty \) static output control of Markov jump systems with an auxiliary approach. Appl. Math. Comput. 273, 553–561 (2016)
Wu, Z.-G., Shen, Y., Su, H., Lu, R., Huang, T.: \(\cal{H}_2\) performance analysis and applications of two-dimensional Hidden Bernoulli jump system. IEEE Trans. Syst. Man Cybern. Syst. (2017). https://doi.org/10.1109/TSMC.2017.2745679
Baik, H.-S., Jeong, H.S., Abraham, D.M.: Estimating transition probabilities in Markov chain-based deterioration models for management of wastewater systems. J. Water Resour. Plan. Manag. 132(1), 15–24 (2006)
Zhang, L., Boukas, E.-K.: Stability and stabilization of Markovian jump linear systems with partly unknown transition probabilities. Automatica 45(2), 463–468 (2009)
Shen, M., Ye, D., Wang, Q.: Mode-dependent filter design for Markov jump systems with sensor nonlinearities in finite frequency domain. Sig. Process. 134, 1–8 (2017)
Luan, X., Zhao, S., Liu, F.: \(\cal{H}_\infty \) control for discrete-time Markov jump systems with uncertain transition probabilities. IEEE Trans. Autom. Control 58(6), 1566–1572 (2013)
Kim, S.H.: Control synthesis of Markovian jump fuzzy systems based on a relaxation scheme for incomplete transition probability descriptions. Nonlinear Dyn. 78(1), 691–701 (2014)
Edwards, C., Spurgeon, S.K.: On the development of discontinuous observers. Int. J. Control 59(5), 1211–1229 (1994)
Almutairi, N.B., Zribi, M.: On the sliding mode control of a ball on a beam system. Nonlinear Dyn. 59(1), 221–238 (2010)
Shi, P., Xia, Y., Liu, G.P., Rees, D.: On designing of sliding-mode control for stochastic jump systems. IEEE Trans. Autom. Control 51(1), 97–103 (2006)
Ligang, W., Shi, P., Gao, H.: State estimation and sliding-mode control of Markovian jump singular systems. IEEE Trans. Autom. Control 55(5), 1213–1219 (2010)
Li, J., Zhang, Q., Zhai, D., Zhang, Y.: Sliding mode control for descriptor Markovian jump systems with mode-dependent derivative-term coefficient. Nonlinear Dyn. 82(1–2), 465–480 (2015)
Wei, Y., Park, J.H., Qiu, J., Wu, L., Jung, H.Y.: Sliding mode control for semi-Markovian jump systems via output feedback. Automatica 81, 133–141 (2017)
Chen, B., Niu, Y., Zou, Y.: Sliding mode control for stochastic Markovian jumping systems with incomplete transition rate. IET Control Theory Appl. 7(10), 1330–1338 (2013)
Kao, Y., Xie, J., Zhang, L., Karimi, H.R.: A sliding mode approach to robust stabilisation of Markovian jump linear time-delay systems with generally incomplete transition rates. Nonlinear Anal. Hybrid Syst. 17, 70–80 (2015)
Khalili, A., Rastegarnia, A., Sanei, S.: Quantized augmented complex least-mean square algorithm: derivation and performance analysis. Sig. Process. 121, 54–59 (2016)
Liberzon, D.: Hybrid feedback stabilization of systems with quantized signals. Automatica 39(9), 1543–1554 (2003)
Zheng, B., Yang, G.: Quantised feedback stabilisation of planar systems via switching-based sliding-mode control. IET Control Theory Appl. 6(1), 149–156 (2012)
Zheng, B., Park, J.H.: Sliding mode control design for linear systems subject to quantization parameter mismatch. J. Frankl. Inst. 353(1), 37–53 (2016)
Song, G., Li, T., Kai, H., Zheng, B.: Observer-based quantized control of nonlinear systems with input saturation. Nonlinear Dyn. 86(2), 1157–1169 (2016)
Zheng, B., Yang, G.: Robust quantized feedback stabilization of linear systems based on sliding mode control. Opt. Control Appl. Methods 34(4), 458–471 (2013)
Xiao, N., Xie, L., Minyue, F.: Stabilization of Markov jump linear systems using quantized state feedback. Automatica 46(10), 1696–1702 (2010)
Rasool, F., Nguang, S.K.: Quantized robust \(\cal{H}_\infty \) control of discrete-time systems with random communication delays. Int. J. Syst. Sci. 42(1), 129–138 (2011)
Shi, P., Liu, M., Zhang, L.: Fault-tolerant sliding-mode-observer synthesis of Markovian jump systems using quantized measurements. IEEE Trans. Ind. Electron. 62(9), 5910–5918 (2015)
Shen, M., Park, J.H.: \(\cal{H}_\infty \) filtering of Markov jump linear systems with general transition probabilities and output quantization. ISA Trans. 63, 204–210 (2016)
Shen, M., Park, J.H., Ye, D.: A separated approach to control of Markov jump nonlinear systems with general transition probabilities. IEEE Trans. Cybern. 46(9), 2010–2018 (2016)
Boyd, S., El Ghaoui, L., Feron, E., Balakrishnan, V.: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia (1994)
Chen, B., Niu, Y., Huang, H.: Output feedback control for stochastic Markovian jumping systems via sliding mode design. Opt. Control Appl. Methods 32(1), 83–94 (2011)
Liu, M., Zhang, L., Shi, P., Zhao, Y.: Sliding mode control of continuous-time Markovian jump systems with digital data transmission. Automatica 80, 200–209 (2017)
Yang, D., Zhao, J.: Robust finite-time output feedback \(\cal{H}_\infty \) control for stochastic jump systems with incomplete transition rates. Circuits Syst. Sig. Process. 34, 1799–1824 (2015)
Acknowledgements
This work was supported by Basic Science Research Programs through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (Grant No. NRF-2017R1A2B2004671), the National Natural Science Foundation of China under Grants (61403189, 61773200), the peak of six talents in Jiangsu Province under Grant 2015XXRJ-011, the China Postdoctoral Science Foundation under Grant 2015M570397, the Doctoral Foundation of Ministry of Education of China under Grant 20133221120012, the Natural Science Foundation of Jiangsu Province of China under Grant BK20130949.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest to this work.
Rights and permissions
About this article

Cite this article
Shen, M., Zhang, H. & Park, J.H. Observer-based quantized sliding mode \({\varvec{\mathcal {H}}}_{\varvec{\infty }}\) control of Markov jump systems. Nonlinear Dyn 92, 415–427 (2018). https://doi.org/10.1007/s11071-018-4064-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4064-x