
Abstract
This paper deals with the problem of observer-based quantized control of nonlinear systems subject to actuator saturation and bounded disturbances. The nonlinearity is assumed to satisfy the local Lipschitz condition and appear in the state equation. Attention is focused on the design of an observer-based controller such that the resulting closed-loop system is convergent to a minimal ellipsoid for every initial condition emanating from a large admissible domain. The admissible Lipschitz constant, the disturbance attenuation level, and admissible domains are obtained through a convex optimization problem. A sufficient condition for the existence of quantized observers guarantees asymptotic stability for the resulting error dynamical system. Finally, illustrative examples are provided to demonstrate the effectiveness of the proposed approach.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Saturation nonlinearities are ubiquitous in engineering systems such as control systems and neural network systems. In the past years, much attention has been drawn to saturation nonlinearities. A great number of results on these topics have been reported and different approaches have been posed in the literature (see, e.g., [1, 2, 5, 9–12]). The polytopic representation of the saturation function has been originally proposed in [1]. The problem of robust controller design of uncertain discrete time delay systems subject to both control actuator saturation and bounded external disturbances was considered in [4], while a state feedback controller was constructed by using an iterative linear matrix inequality relaxation scheme. In [5], a new criterion for the regional asymptotic stability of discrete time delayed system with saturation nonlinearity by using sector-bounded nonlinear model was established. In recent years, the study of Markovian jump systems has received considerable attention and lots of results have been reported [6–8]. It is worth noting that, the robust \(H_\infty \) filtering problem for time-varying Markovian jump systems with randomly occurring nonlinearities and sensor saturation was investigated in [9]. Note that the case with polytopic uncertainties and the case with partially unknown transition probabilities were considered in [9], respectively. The observer-based discrete-time consensus problem for a general linear multi-agent system subject to actuator saturation was discussed in [10], where this problem was solved by means of the bounded input technique. In [11], the problem of event-based linear control of systems subject to input saturation was proposed and novel event-triggered control algorithms were developed to achieve global stabilization.
For decades, some work dealt with the problem of observer design has appeared in many aspects. The observer-based control problem for a class of uncertain systems was studied in [14] where exponential stabilizability and the convergence rate of system were proposed. Recently, observers design for Lipschitz nonlinear systems has been widely investigated, see for instance [15–17, 21, 22] and the references therein. In [15], the non-convex problem was decomposed into observer design and controller design by introducing new scalar variables. A new algorithm for robust \(H_\infty \) nonlinear observer design of a class of Lipschitz nonlinear systems was proposed in [16]. After that, the method proposed in [17] was noniterative and not only provided a less restrictive solution but also extended the results to uncertain and Lipschitz nonlinear systems. By using a single-step approach, full-order and reduced-order observer-based quantized feedback controllers were designed in [19]. A less conservative Lipschitz condition was introduced in [21]. It should be pointed out that this condition led to less restrictive synthesis conditions than those reported in the literature. Moreover, much attention has been focused on the problems of observer design for uncertain systems (see, e.g. [22, 23]), Markov jump systems (see, e.g. [24, 25]), complex dynamical network (see, e.g. [26]) and time delay systems (see, e.g. [27, 28]). On the other hand, the output feedback control is more useful because it can be easily implemented. Therefore, some important problems have been studied, such as robust static output feedback \(H_\infty \) control [32], dynamic output-feedback-based \(H_\infty \) design [29] and output feedback predictive control [30]. In [31], the observer and controller gains were computed simultaneously by solving only one inequality and a new linear matrix inequality (LMI) condition was provided for the observer-based \(H_\infty \) stabilization. In contrast to the existing conditions for observer-based \(H_\infty \) control, the improvement of the proposed results over the existing ones is shown in [33].
On another research front, a quantized feedback system is a control system in which the feedback loop involves finite-level quantization of signals. A quantizer can convert a real-valued signal into a piecewise constant one. Since the nonlinearities caused by the finite-level quantization of signals, the analysis and synthesis of quantized feedback systems are complicated. Recently, the quantized feedback control problems have recently been paid much research attention (see, e.g. [19, 34–38]). Based on the classical sector bound approach, a logarithmic quantizer has been reported in [34], where the robust \(H_\infty \) finite-horizon filtering problem was investigated for discrete time-varying stochastic systems. With regard to the transmission error, an effective quantization method and the zooming protocol were presented in [35]. The feedback stabilization problem for single-input single-output linear uncertain control systems with saturating quantized measurements was addressed in [36]. In particular, the problems of stabilization of control systems with quantization and actuator saturation were developed in [37] and [38], respectively. To the best of the authors’ knowledge, there are no reports on the problem of quantized control for systems via actuator saturation and bounded disturbances using a saturated quantizer.
Motivated by these studies, this brief considers the problem of observer-based quantized control of nonlinear systems with input saturation and bounded disturbances. It is often difficult to handle simultaneous the nonlinearities caused by the quantization and Lipschitz nonlinearities. In this paper, the saturated quantizer is addressed by using the method to investigate the problem of nested saturations. Different from the previous results where the Lipschitz constant is completely fixed, a more general situation where the admissible Lipschitz constant is obtained through a convex optimization problem. The purpose of this paper is to develop a sufficient condition such that there exists an admissible initial domain ensuring that for every initial condition from this admissible domain, all solutions of the closed-loop system are convergent to a minimal ellipsoid. More specifically, a specified disturbance attenuation level is also required to be achieved.
Notation Throughout this paper, for matrices \(X, Y\in \mathbb {R}^{n\times n}\), the notation \(X\ge Y\) (respectively, \(X>Y\)) with X and Y being symmetric matrices, means that the matrix \(X-Y\) is positive semi-definite (respectively, positive definite). I is the identity matrix with appropriate dimension. T represents the transpose. For a matrix \(H\in \mathbb {R}^{m\times n}, H_{(h,\cdot )}\) denotes its h-th row. \(1_m\) denotes a vector of m dimensions with components equal to 1. \(\hbox {diag}\{a_1,\ldots , a_n\}\) stands for a diagonal matrix whose diagonal elements are \(a_1,\ldots , a_n\). For a vector \(v\in \mathbb {R}^n,{v_{(i)},i=1,2,\ldots ,n}\) denotes the i-th component of v. Matrices, if not explicitly stated, are assumed to have compatible dimensions.
2 Problem formulation
Consider a discrete nonlinear system with input saturation and bounded system disturbances, which is described by
where \(x(k)\in \mathbb {R}^n\) is the state, \(u(k)\in \mathbb {R}^m\) is the control input, \(y(k)\in \mathbb {R}^p\) is the output, \(z(k)\in \mathbb {R}^q\) is the control output and \(w(k)\in \mathbb {R}^r\) is the disturbance input. \(A, B, C, D, E, G_1, G_2\) and \(G_3\) are known real constant matrices with appropriate dimensions denoting the nominal system of (1)–(3), \(\Delta A(k), \Delta C(k)\) and \(\Delta G_1(k)\) are unknown norm-bounded matrices representing parameter uncertainties, and are assumed to be of the form
where \(M_l, N_l, l=1,2,3\) are known real constant matrices and \(F_l(k), l=1,2,3\) are unknown real matrix satisfying \(F_l(k)^TF_l(k)\le I\). \(\hbox {sat}(\cdot ){:} \mathbb {R}^m\rightarrow \mathbb {R}^m\) is vector valued saturation function defined as \(\hbox {sat}_{U_1}(u(k))=\left[ \begin{array}{ccc} \hbox {sat}_{U_1}(u(k)_{(1)})&\ldots&\hbox {sat}_{U_1}(u(k)_{(m)}) \end{array} \right] ^T\), where \(\hbox {sat}_{U_1}(u(k)_{(h)})=\hbox {sign}(u(k)_{(h)})\min \{U_{1(h)},|u(k)_{(h)}|\}\) with \( U_1=\left[ \begin{array}{ccc} U_{1(1)}&\ldots&U_{1(m)} \end{array} \right] ^T, U_{1(h)}>0, h=1,2,\ldots , m\) being constants. \(U_1\) denotes the level of saturation.
Throughout this paper, we consider the following saturated quantizer with saturation level \(U_2\) (\(U_2>0\)):
where \(\Delta _0>0\) is the quantization error bound (see [13]). Then, we let \(\phi (v)=\mathscr {Q}(v)-\hbox {sat}_{U_2}(v)\). Furthermore, one has \(|\phi (v_{(h)})|\le \frac{\Delta _0}{2}, h=1,2,\ldots ,m\), i.e. \(|\phi (v)|\le \sqrt{m}\frac{\Delta _0}{2}\). Similar to [2], we define the set \(\mathcal {V}=\{v\in \mathbb {R}^m{:} v_{(j)}=1,2,3\}\). It is easy to see that there are \(3^m\) elements in \(\mathcal {V}\). Then, we present a \(v\in \mathcal {V}\) to define a diagonal matrix \(\Pi _i(v)\) such that
where \(\forall j=1,2,\ldots ,m,\)
As shown in [17], the function \(f(\cdot ){:} \mathbb {R}^n\rightarrow \mathbb {R}^n\) stands for the nonlinearity of the system and satisfies the following assumption.
Assumption 1
We assume that the function f(x) is locally Lipschitz with respect to x in a region \(\mathscr {D}\) containing the origin if \(\Vert f(0)\Vert =0\) and
where \(\Vert \cdot \Vert \) is the induced 2-norm and \(\gamma >0\) is called the Lipschitz constant.
Remark 1
In this case, the Lipschitz constant \(\gamma >0\) is not determined. Our aim is finding the maximum allowable Lipschitz constant \(\gamma ^{*}\).
We introduce the following technical lemma, which is crucial to the proof of our main results.
Lemma 1
([3]) Let \(\mathcal {D}, \mathcal {H}\) and \(\mathcal {F}\) be real matrices of appropriate dimensions with \(\mathcal {F}\) satisfying \(\mathcal {F}^T\mathcal {F}\le I\). Then for any scalar \(\lambda >0\), we have
Now, we design observer-based controller for system (1)–(3) of the form
where \(\tilde{x}(k)\in \mathbb {R}^n\) is the estimated state, L is the gain matrix of the designed observer, K is the gain matrix of the feedback controller. Defining the observer error as \(e(k)=x(k)-\tilde{x}(k)\), we have
Applying the controller (6) to system (1)–(3), we obtain the resulting closed-loop system as
where
Then, the problem to be addressed can be formulated as follows:
-
Determine a controller (6) (with \(u(k)=0\) and \(w(k)=0\)) such that the closed-loop system (8) is asymptotically stable with maximum allowable Lipschitz constant \(\gamma ^*\).
-
Design a state feedback gain K and an observer gain L such that there exists the controller (6) (with \(w(k)=0\)) ensuring that the closed-loop system (8) is convergent to the minimal ellipsoid for every initial condition from the admissible domain. Simultaneously, the corresponding domains and the maximum allowable Lipschitz constant \(\gamma ^*\) are obtained.
-
Determine a quantized observer in the form of (6) such that the resulting closed-loop system (8) is asymptotically stable and a prescribed disturbance attenuation level is achieved.
3 Stability analysis
The result on stability analysis for system (8) with \(u(k)=0\) and \(w(k)=0\) is provided in the following theorem.
Theorem 1
The uncertain discrete system (8) with \(u(k)=0\) and \(w(k)=0\) is asymptotically stable if there exist matrices \( P>0, Z, L\) and scalars \(\varepsilon>0, \alpha>0, \lambda _1>0, \lambda _2>0\) such that the following condition holds:
where
Proof
Under conditions \(u(k)=0\) and \(w(k)=0\), system (8) is reduced to
A Lyapunov function for system (10) is constructed by using symmetric positive-definite matrix P as follows:
Then, we have
Fist, denote \(Q=\varepsilon I-P\). Then, from Assumption 1, it follows that
Hence, we can get
where \(\Theta _1=(\hat{A}+\Delta \hat{A}(k))^TP(Q^{-1}+P^{-1})P(\hat{A}+\Delta \hat{A}(k))+\varepsilon \gamma ^2I-P\). For a matrix \(Z= \left[ \begin{array}{cc} Z_1 &{} \ 0 \\ 0 &{} \ Z_2 \end{array} \right] \), it is worth noting that the following inequality holds (see [25]):
Using the above inequality (14), and then pre-multiplying and post-multiplying (9) by \(\hbox {diag}\{I,I,I,I, Z^{-T},I\}\) and \(\hbox {diag}\{I,I,I,I, Z^{-1},I\}\), respectively, it is easy to deduce
By applying the Schur complement equivalence, it follows from (15) that
It follows from Lemma 1 that exist matrices \(F_1(k), F_2(k)\) such that
Now taking into account (17) and using the Schur complement equivalence again, then it can be shown from (16) that
Furthermore, by the matrix inversion lemma, it follows that \((Q^{-1}+P^{-1})^{-1}=P-P(Q+P)^{-1}P=P-P\varepsilon ^{-1}P\). Define \(\alpha =(\varepsilon \gamma ^2)^{-1}\), so that the above inequality (18) implies that \(\Theta _1<0\). Thus, the uncertain discrete system (8) is stable with \(u(k)=0\) and \(w(k)=0\). This completes the proof. \(\square \)
Remark 2
It should be pointed out that, the condition in Theorem 1 is not in the form of standard LMI. Thus, it cannot be solved directly. To overcome this difficulty, we can let \(\hat{L}={Z_{2}^{T}}L\). Moreover, the inequality (9) can be solved directly by using the standard convex optimization numerical software.
4 Observer-based quantized control design
In this section, an observer-based quantized feedback controller will be designed for system (8) (with \(w(k)=0\)) such that the closed-loop system (8) is convergent to a minimal ellipsoid.
Theorem 2
Consider the uncertain discrete system (8) with \(w(k)=0\). For given scalars \(0<\pi _1<\pi _2, 0<\pi _3\) and a matrix \(J>0\), if there exist matrices \(P>0, P_2>0, H_1, H_2, K, L\), a diagonal matrix \(0<T\in \mathbb {R}^{m\times m}\) and scalars \(\varepsilon>0, \alpha>0, \lambda _1>0, \lambda _2>0\) such that the following inequalities hold:
where
Then the resulting closed-loop system (8) with \(w(k)=0\) is convergent to a small ellipsoid for every initial condition from an admissible domain.
Proof
For further discussion, we denote an ellipsoid for a positive definite matrix \(P=\left[ \begin{array}{cc} P_{11} &{} \quad 0 \\ 0 &{} \quad P_{12} \end{array} \right] \) by \(\Omega (P)=\{\hat{x}(k)\in \mathbb {R}^{2n}{:} \hat{x}(k)^TP\hat{x}(k)\le 1\}\) and a symmetric polyhedron for a matrix \(\hat{H}_1\in \mathbb {R}^{m\times 2n}\) by \(\mathcal {L}(\hat{H}_1,U_1)=\{\hat{x}(k)\in \mathbb {R}^{2n}{:} \mid \hat{H}_{1(h,\cdot )}\hat{x}(k)\mid \le U_{1(h)}, h=1,2,\ldots ,m\}\). From [1] and [2], it follows that (20) is equivalent to \(\Omega (P)\subset \mathcal {L}(\hat{H}_1,U_1)\cap \mathcal {L}(\hat{H}_2,U_2)\). By considering (22), it follows that the ellipsoid \(\Omega (P)\) contains the ellipsoid \(\Omega (P_2)\) with \(P_2=\left[ \begin{array}{cc} P_{21} &{} \quad 0 \\ 0 &{} \quad P_{22} \end{array} \right] \). By following a similar line as in [2], for \(\forall v\in \mathcal {V}\) and for all \(\hat{x}(k)\) in some ellipsoid \(\Omega (P), \hat{B}\hbox {sat}_{U_1}(\mathscr {Q}(\hat{K}\hat{x}(k)))\) can be expressed as
where convex\(\{\cdot \}\) stands for the convex full. To proceed, a Lyapunov function candidate is chosen as \(V(k)=\hat{x}(k)^TP\hat{x}(k)\). For \(\hat{x}(k)\in \Omega (P)\), the forward difference in the functional V(k) along the solution of (8) with \(w(k)=0\) is given by
Similar to the derivation of (12), we can show
On the other hand, it is easy to show that
where
The proof follows a similar procedure to the proof of Theorem 1. Considering \(-P^{-1}\le -2J+JPJ\) (see [18]), the matrix inequality (19) implies
Furthermore, by the Schur complement equivalence and Lemma 1, we can deduce from (27) that
Pre-multiplying and post-multiplying (28) by \(\hbox {diag}\{P,I,I,\}\) and using the matrix inversion lemma it is easy to get that
Note that \(\alpha =(\varepsilon \gamma ^2)^{-1}\). From (29) it is easy to see that \(\Theta _2<0\). Then, by the Schur complement equivalence, it follows from (21) that
Using this together with (29) and noting (26), we can verify that \(\Delta V(k)<0\) for \(\hat{x}(k)\) such that \(\hat{x}(k)^TP\hat{x}(k)\le 1\) and \(\hat{x}(k)^TP_2\hat{x}(k) \ge 1\). Hence, the closed-loop system obtained by applying observer-based quantized feedback controller (6) to system (1)–(2) (with \(w(k)=0\)) converges to \(\{\hat{x}(k)\in \mathbb {R}^{2n}{:} \hat{x}(k)^TP_2\hat{x}(k)\le 1\}\mid _{(x(k),0)}\) for all initial conditions in \(\{\hat{x}(k)\in \mathbb {R}^{2n}: \hat{x}(k)^TP\hat{x}(k)\le 1 \ \hbox {and} \hat{x}(k)^TP_2\hat{x}(k)\ge 1\}\mid _{(x(k),0)}\). This completes the proof. \(\square \)
When the conditions of Theorem 2 are satisfied, we can obtain the estimates of the corresponding domain of attraction of the closed-loop systems with unknown the Lipschitz constant. An implicit objective of this paper is to maximize the estimation of the domain of initial states associated with the closed-loop system. Simultaneously, our another aim is to minimize the ellipsoid \(\Omega (P_2)\). Similar to [17] and [20], for a matrix R, the corresponding domains and the maximum allowable Lipschitz constant \(\gamma ^*=\frac{1}{\sqrt{\varepsilon \alpha }}\) can be determined by solving the following convex optimization problem
where the tuning parameter \(\rho \) satisfies \(0<\rho <1\).
Remark 3
In implementation of (30), the matrix J may be chosen based on the results in [18]. The matrix J should be a positive-definite matrix and it can be set as \(\left[ \begin{array}{cc} \beta (A^TA+I)^{-1} &{}\quad 0 \\ 0 &{}\quad \beta (A^TA+I)^{-1} \end{array} \right] \), where \(\beta \) is positive constant.
5 Robustness analysis
In what follows, we will present some conditions to design a quantized observer in the form of (6) such that the corresponding closed-loop system is asymptotically stable and a prescribed disturbance attenuation level is achieved.
Theorem 3
Given constant scalars \(0<\pi _1<\pi _2, 0<\pi _3\) and a matrix \(J>0\), the closed-loop system obtained by applying observer-based quantized feedback controller (6) to system (1)–(3) is robustly stable with disturbance attenuation level \(\eta \), if there exist matrices \(P>0, P_2>0, H_1, H_2, K, L\), a diagonal matrix \(0<T\in \mathbb {R}^{m\times m}\) and scalars \(\varepsilon>0, \alpha>0, \lambda _1>0, \lambda _2>0, \lambda _3>0\) such that the following inequalities hold:
where
Proof
Introduce the following cost function for system (3) as
Under zero initial condition, index \(\mathcal {J}\) can be rewritten as
Applying the controller (6)–(3), we can obtain the resulting closed-loop system as
where \(\hat{G}_1=\bar{G}_1+M_3F_3(k)\hat{N}_3\).
Moreover, we can deduce that
where
Then, the proof can be carried out by following similar lines as in the proof of Theorems 1 and 2. Therefore, it can be shown that \(z(k)^Tz(k)-\eta ^2w(k)^Tw(k)+\Delta V(k)<0\). When the zero initial condition is used, it is easy to get that \(z(k)^Tz(k)-\eta ^2w(k)^Tw(k)<-V(k+1)<0\), that is \(\mathcal {J}<0\). Thus, the closed-loop system obtained by applying observer-based quantized feedback controller (6) to system (1)–(3) is robustly stable and it also satisfies a prescribed disturbance attenuation level. This completes the proof. \(\square \)
According to the conditions of Theorem 3, the maximum Lipschitz constant and the minimum disturbance attenuation level can be obtained by utilizing multi-objective optimization method. Parallel to the preceding section, we will present the following convex optimization problem
where \(\hat{\eta }=\eta ^2\) and \(0<\rho <1\).
6 Simulation examples
Here, two examples are presented in this section in order to illustrate the effectiveness of the proposed approach.
Example 1
Consider the uncertain discrete system from (1) to (2) with parameters as follows:
In this example, we assume \(\pi _1=10^{-3}, \pi _2=0.05, \pi _3=1, U_1=6, U_2=8, \beta =15\) and the quantization error bound \(\Delta _0=1.2\). In what follows, based on our results, we resort to the standard convex optimization numerical software to check the convex optimization problem in (30), and obtain \(\gamma ^*=0.0566\),

Real states of the system (8) with \(w(k)=0\) (Example 1)

Estimated states of the system (8) with \(w(k)=0\) (Example 1)
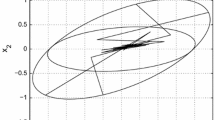
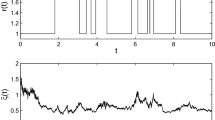
To verify the designed observer, Fig. 1 shows the real states for initial condition given by \(x(0)=\left[ \begin{array}{c} -3 \\ 1 \end{array} \right] \) and Fig. 2 presents the estimated states for initial condition given by \(\tilde{x}(0)=\left[ \begin{array}{c} 0 \\ 0 \end{array} \right] \). Moreover, Fig. 3 shows the error dynamics for the same initial conditions. It can be observed from Fig. 3 that the estimation error does tend to zero asymptotically. Figure 4 shows the input trajectory of the closed-loop system for the aforementioned initial conditions. It is clearly observed from Fig. 5 that some trajectories of system states emanating from the outer ellipsoid converge to the inner ellipsoid.

Estimation error under the observer (6) with \(w(k)=0\) (Example 1)

Trajectory of input (Example 1)

State trajectories (Example 1)
Example 2
Consider the uncertain discrete system from (1) to (3) with the same system parameters as in Example 1 and
In this case, we choose \(\pi _1=0.01, \pi _2=0.17, \pi _3=1, U_1=6, U_2=8, \beta =7\) and the quantization error bound \(\Delta _0=1.2\). Then, using the standard convex optimization numerical software, we can get the disturbance attenuation level \(\eta =2.2377\) and the maximum Lipschitz constant \(\gamma ^*=0.0307\). By solving the convex optimization problem in (38), the corresponding design parameters can be obtained as follows:

Real states of the system (8) (Example 2)

Estimated states of the system (8) (Example 2)

Estimation error under the observer (6) (Example 2)

Trajectory of input (Example 2)

State trajectories (Example 2)
The real states of the closed-loop system (8) for initial condition given by \(x(0)=\left[ \begin{array}{c} -2.2 \\ 0.8 \end{array} \right] \) are shown in Fig. 6 and the estimated states of the closed-loop system (8) for initial condition given by \(\tilde{x}(0)=\left[ \begin{array}{c} 0 \\ 0 \end{array} \right] \) are recorded in Fig. 7. Furthermore, Fig. 8 depicts the error dynamics for the same initial conditions. Fig. 9 plots the trajectory of input for the same initial conditions. Some state vectors of system under the quantized feedback controller are shown in Fig. 10, from which we see that the states cannot converge to the origin; however, they remain around a minimal ellipsoid.
7 Conclusions
This paper has studied observer-based quantized control of nonlinear systems with input saturation and bounded system disturbances. The designed observer-based quantized feedback controllers guarantee that there exists an admissible initial domain ensuring that all solutions of the closed-loop system are convergent to a minimal ellipsoid for every initial condition from this admissible domain. In addition, the maximum Lipschitz constant and the minimum disturbance attenuation level are obtained by using multi-objective optimization method. Finally, two simulation examples have been presented to demonstrate the usefulness of the derived results.
References
Hu, T., Lin, Z.: Control Systems with Actuator Saturation: Analysis and Design. Birkhäuser, Boston (2001)
Bateman, A., Lin, Z.: An analysis and design method for discrete-time linear systems under nested saturation. IEEE Trans. Autom. Control 47, 1305–1310 (2002)
Petersen, I.: A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 8, 351–357 (1987)
Xu, S., Feng, G., Zou, Y., Huang, J.: Robust controller design of uncertain discrete time-delay systems with input saturation and disturbances. IEEE Trans. Autom. Control 57, 2604–2609 (2012)
Lee, S., Kwon, O., Park, J.: Regional asymptotic stability analysis for discrete-time delayed systems with saturation nonlinearity. Nonlinear Dyn. 67, 885–892 (2012)
Shen, H., Park, J., Zhang, L., Wu, Z.: Robust extended dissipative control for sampled-data Markov jump systems. Int. J. Control 87, 1549–1564 (2014)
Shen, H., Park, J., Wu, Z.: Reliable mixed passive and \(H_\infty \) filtering for semi-Markov jump systems with randomly occurring uncertainties and sensor failures. Int. J. Robust Nonlinear Control 25, 3231–3251 (2015)
Shen, H., Zhu, Y., Zhang, L., Park, J.: Extended dissipative state estimation for Markov jump neural networks with unreliable links. IEEE Trans. Neural Netw. Learn. Syst. (2015). doi:10.1109/TNNLS.2015.2511196
Dong, H., Wang, Z., Ho, D., Gao, H.: Robust \(H_\infty \) filtering for Markovian jump systems with randomly occurring nonlinearities and sensor saturation: the finite-horizon case. IEEE Trans. Signal Process. 59, 3048–3057 (2011)
Zhang, L., Chen, M., Su, H.: Observer-based semi-global consensus of discrete-time multi-agent systems with input saturation. Trans. Inst. Meas. Control 38, 665–674 (2016)
Zhang, L., Chen, M.: Event-based global stabilization of linear systems via a saturated linear controller. Int. J. Robust Nonlinear Control 26, 1073–1091 (2016)
Su, H., Chen, M., Wang, X., Lam, J.: Semiglobal observer-based leader-following consensus with input saturation. IEEE Trans. Industr. Electron. 61, 2842–2850 (2014)
Laska, J., Boufounos, P., Davenport, M., Baraniuk, R.: Democracy in action: quantization, saturation, and compressive sensing. Appl. Comput. Harmon. Anal. 31, 429–443 (2011)
Lien, C.: Robust observer-based control of systems with state perturbations via LMI approach. IEEE Trans. Autom. Control 49, 1365–1370 (2004)
Ibrir, S., Diopt, S.: Novel LMI conditions for observer-based stabilization of Lipschitzian nonlinear systems and uncertain linear systems in discrete-time. Appl. Math. Comput. 206, 579–588 (2008)
Abbaszadeh, M., Marquez, H.: Robust \(H_\infty \) observer design for sampled-data Lipschitz nonlinear systems with exact and Euler approximate models. Automatica 44, 799–806 (2008)
Abbaszadeh, M., Marquez, H.: LMI optimization approach to robust \(H_\infty \) observer design and static output feedback stabilization for discrete-time nonlinear uncertain systems. Int. J. Robust Nonlinear Control 19, 313–340 (2009)
Chen, K., Fong, I.K.: Stability analysis and output-feedback stabilisation of discrete-time systems with an interval time-varying state delay. IET Control Theory Appl. 4, 563–572 (2010)
Zhang, J., Lam, J., Xia, Y.: Observer-based output feedback control for discrete systems with quantised inputs. IET Control Theory Appl. 5, 478–485 (2011)
Tarbouriech, S., Gouaisbaut, F.: Control design for quantized linear systems with saturations. IEEE Trans. Autom. Control 57, 1883–1889 (2012)
Zemouche, A., Boutayeb, M.: On LMI conditions to design observers for Lipschitz nonlinear systems. Automatica 49, 585–591 (2013)
Kheloufi, H., Zemouche, A., Bedouhene, F., Souley-Ali, H.: A robust \(H_\infty \) observer-based stabilization method for systems with uncertain parameters and Lipschitz nonlinearities. Int. J. Robust Nonlinear Control 26, 1962–1979 (2016)
Kheloufi, H., Zemouche, A., Bedouhene, F., Boutayeb, M.: On LMI conditions to design observer-based controllers for linear systems with parameter uncertainties. Automatica 49, 3700–3704 (2013)
Yin, Y., Shi, P., Liu, F., Karimi, H.: Observer-based \(H_\infty \) control on stochastic nonlinear systems with time-delay and actuator nonlinearity. J. Franklin Inst. 350, 1388–1405 (2013)
Yin, Y., Shi, P., Liu, F., Teo, K.: Observer-based \(H_\infty \) control on nonhomogeneous Markov jump systems with nonlinear input. Int. J. Robust Nonlinear Control 24, 1903–1924 (2014)
Jeong, S., Ji, D., Park, J., Won, S.: Adaptive synchronization for uncertain complex dynamical network using fuzzy disturbance observer. Nonlinear Dyn. 71, 223–234 (2013)
Ghanes, M., Leon, J., Barbot, J.: Observer design for nonlinear systems under unknown time-varying delays. IEEE Trans. Autom. Control 58, 1529–1534 (2013)
Zhou, B.: Observer-based output feedback control of discrete-time linear systems with input and output delays. Int. J. Control 87, 2252–2272 (2014)
Tang, Z., Park, J., Lee, T.: Dynamic output-feedback-based \(H_\infty \) design for networked control systems with multipath packet dropouts. Appl. Math. Comput. 275, 121–133 (2016)
Ding, B., Ping, X.: Output feedback predictive control with one free control move for nonlinear systems represented by a Takagi–Sugeno mode. IEEE Trans. Fuzzy Syst. 22, 249–263 (2014)
Grandvallet, B., Zemouche, A., Souley-Ali, H., Boutayeb, M.: New LMI condition for observer-based \(H_\infty \) stabilization of a class of nonlinear discrete-time systems. SIAM J. Control Optim. 51, 784–800 (2013)
Chang, X., Park, J., Zhou, J.: Robust static output feedback \(H_\infty \) control design for linear systems with polytopic uncertainties. Syst. Control Lett. 85, 23–32 (2015)
Chang, X., Yang, G.: New results on output feedback \(H_\infty \) control for linear discrete-time systems. IEEE Trans. Autom. Control 59, 1355–1359 (2014)
Shen, B., Wang, Z., Shu, H., Wei, G.: Robust \(H_\infty \) finite-horizon filtering with randomly occurred nonlinearities and quantization effects. Automatica 46, 1743–1751 (2010)
Liu, W., Wang, Z., Ni, M.: Quantized feedback stabilization for a class of linear systems with nonlinear disturbances. Nonlinear Anal. Hybrid Syst. 8, 48–56 (2013)
Corradini, M., Orlando, G.: Robust quantized feedback stabilization of linear systems. Automatica 44, 2458–2462 (2008)
Yang, H., Xia, Y., Yuan, H., Yan, J.: Quantized stabilization of networked control systems with actuator saturation. Int. J. Robust Nonlinear Control (2016). doi:10.1002/rnc.3525
Park, B., Yun, S., Park, P.: \(H_\infty \) control of continuous-time uncertain linear systems with quantized-input saturation and external disturbances. Nonlinear Dyn. 79, 2457–2467 (2015)
Acknowledgments
This work was partially supported by the following grants: The Startup Foundation for Introducing Talent of NUIST (No. S8113107001), the Practice Innovation Training Program Projects for College Students (No. 201510300185), Natural Science Fundamental Research Project of Jiangsu Colleges and Universities (No. 15KJB120007), National Natural Science Foundation of P. R. China (No. 61503190, 61573189, 61403207), Natural Science Foundation of Jiangsu Province (No. BK20150927, BK20131000), Outstanding Youth Science Fund Award of Jiangsu Province (No. BK20140045), Six talents in Jiangsu Province (No. 2015–DZXX–013), the Perspective Research Foundation of Production Study and Research Alliance of Jiangsu Province (No. BY2015007–01).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Song, G., Li, T., Hu, K. et al. Observer-based quantized control of nonlinear systems with input saturation. Nonlinear Dyn 86, 1157–1169 (2016). https://doi.org/10.1007/s11071-016-2954-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2954-3