
Abstract
In this paper, the problem of exponential cluster synchronization of general hybrid-coupled impulsive dynamical networks with internal delay and delayed coupling is investigated. A more general delayed coupling term including different transmission delay and self-feedback delay is taken into account. By using average impulsive interval approach and the analysis technique, some novel globally exponential cluster synchronization criteria are derived analytically. It is noted that the internal delay, transmission delay and self-feedback delay are all time-varying and can be different from each other, the inner connecting matrices are not demanded to be diagonal and the coupling matrices are not restricted to be symmetric or irreducible, more consistent with the realistic networks. Particularly, it is shown that the derived cluster synchronization criteria are simultaneously applicable for studying general delayed dynamical networks with synchronizing impulses or desynchronizing impulses. Numerical examples are finally given to illustrate the effectiveness of the obtained theoretical results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past few decades, much effort has been devoted to the study of complex dynamical networks for their wide and potential applications in various fields [1, 2]. Especially, synchronization phenomena known as typical collective behaviors of complex dynamical networks have attracted increasing attention because network synchronization not only can explain many natural phenomena but also has many applications in image processing, secure communication, mechanical engineering, etc. [2, 3]. Up to now, many different synchronization patterns have been well studied, such as complete synchronization [3], phase synchronization [4], projective synchronization [5], cluster synchronization [6]. Among them, complete synchronization is the most special one and characterized by that all nodes in a dynamical network approach to a uniform dynamical behavior [3].
Cluster synchronization is a particular synchronization phenomenon requiring that the set of nodes in a dynamical network split into several subgroups called clusters or communities, such that the nodes in the same cluster reach complete synchronization but those in different clusters do not [6]. Due to its significance in biological science [7] and communication engineering [8], cluster synchronization of complex dynamical networks has recently received notable attention, and some interesting results have been reported [6, 9–12]. For example, Ma et al. [6] designed a coupling scheme with cooperative and competitive weight couplings to realize cluster synchronization for connected chaotic networks. Cao et al. [9] considered cluster synchronization in an array of hybrid-coupled neural networks with delay. Zhang et al. [10] considered cluster synchronization problem for coupled impulsive genetic oscillators with external disturbances and communication delay. Zhang et al. [11] investigated cluster synchronization in networks with asymmetric negative couplings. Cai et al. [12] discussed cluster synchronization of overlapping uncertain complex networks with time-varying impulse disturbances. Meanwhile, many effective control strategies have been proposed to drive complex dynamical networks to achieve cluster synchronization [13–18]. In [13], a simple pinning control scheme was proposed to realize cluster synchronization in community networks with or without delay. In [14], the problem of driving a general network to a selected cluster synchronization pattern by means of a pinning control strategy was discussed. In [15], by using a decentralized adaptive strategy, pinning control for cluster synchronization of undirected complex dynamical networks was investigated. In [16], by adding some simple intermittent pinning controllers, cluster synchronization in linear coupled networks was considered. Based on a decentralized adaptive intermittent pinning control scheme, cluster synchronization of directed heterogeneous dynamical networks was explored in [17]. In addition, Hu et al. [18] studied cluster synchronization of complex networks via event-triggered strategy under stochastic sampling.
In reality, due to the finite speeds of transmission and spreading as well as traffic congestion, time delay often occurs in the process of information storage and transmission in dynamical networks, and it can cause instability, oscillation or bad system performance [9, 19–31]. Therefore, it is necessary to study the effect of time delay on synchronization of dynamical networks. Generally, there are two types of time delays in dynamical networks. One is internal delay occurring inside the dynamical node [9, 19–23]. The other is coupling delay caused by the exchange of information between dynamical nodes [21–31]. The first type of time delay comes from intrinsic factor associated with the dynamical node or oscillator, and it is usually called response or processing time delay, for instance, the time delay associated with autapse connected to neuron [20]. The second type of time delay is regarded as transmission (or propagation) delay between dynamical nodes of network; for example, time delay with diversity is involved in the neuronal network and the effect of time delay is considered in biological systems [23–25]. Hence, when modeling real-world complex dynamical networks, both the internal delay and coupling delay should be taken into consideration. Indeed, this kind of dynamical network is ubiquitous in the real world, especially in many biological networks and neural networks. For example, in cell-cell communication network, due to the transcription, translation and translocation processes of regulatory molecules, and diffusion or transport process of the signal molecules among cells, time delays are unavoidably encountered in both cell genetic systems and the interacting among the cell genetic systems [22, 23]. In the implementation of neural networks, due to the finite switching speeds of neurons and amplifiers, and finite information transmission and processing speeds among the neurons, time delays inevitably exist in both neurons and the signal transmission among the neurons [29].
Recently, considerable attention has been paid to synchronization in delayed dynamical networks. It is noted that most of the existing studies have been focused on the delayed coupling term given by \({\varGamma }_1 \big (x_j(t-\sigma )-x_i(t-\sigma ) \big )\) or \({\varGamma }_1 \big (x_j(t-\sigma )-x_i(t) \big )\) [22, 26–31]. The first one means that the node’s own state and neighbors’s states are affected by the same delay, i.e., each dynamical node has a feedback term with the same delay as the transmission delay [22, 26, 27], while the second one implies that only the transmission delay for signal sent from node j to node i exists in the network, i.e., no self-delay exists in the feedback term [28, 29]. However, as mentioned in [21, 30, 31], in the signal transmission process, delay may affect both the node’s own state and neighbors’s states and self-delay may be different from neighboring delay; that is, the delayed coupling term is described by \({\varGamma }_1 \big (x_j(t-\sigma _1)-x_i(t-\sigma _2) \big )\), which is feedback with different self-delay. As a matter of fact, when the ability of an isolated dynamical node to acquire its own information is ineffective, there should exist a delayed feedback term [29], and so it is reasonable to assume that the delayed coupling term has the form of \({\varGamma }_1 \big (x_j(t-\sigma _1)-x_i(t-\sigma _2) \big )\). Obviously, this type of delayed coupling term takes the aforementioned two types of delayed coupling terms as a special case. So far, there are few to discuss the case in which the delayed coupling term is given by \({\varGamma }_1 \big (x_j(t-\sigma _1)-x_i(t-\sigma _2) \big )\) [21, 30, 31]. Therefore, cluster synchronization of dynamical networks with the delayed coupling term as \({\varGamma }_1 \big (x_j(t-\sigma _1(t))-x_i(t-\sigma _2(t)) \big )\) will be considered in this paper.
On the other hand, because of switching phenomenon, frequency change, or other sudden noise, the states of nodes in many real-world dynamical networks are often subject to instantaneous perturbations and experience abrupt changes at certain instants, i.e., they exhibit impulsive effects [31–38, 41–44]. Impulsive effects can also be found in many evolutionary processes and biological systems [31, 32, 41]. In the last decade, impulsive dynamical networks have drawn more and more attention for their various applications in information science, economic systems, automated control systems, etc. [41–44]. Recently, much progress has been made in the investigation of synchronization of impulsive dynamical networks [31–44]. For instance, stochastic synchronization was addressed for delayed dynamical networks with desynchronizing and synchronizing impulses in [31]. In [34], synchronization of nonlinear dynamical networks with heterogeneous impulses was investigated, where the impulsive effect in each node is not only nonidentical from each other, but also time-varying at different impulsive instants. In [39], the problem of designing decentralized impulsive controllers for global synchronization of complex dynamical network with nonidentical nodes and coupling delays was studied. In [40], the H \(_{\infty }\) synchronization problem for complex dynamical networks with coupling delays and external disturbance via distributed impulsive control was addressed. In [41], Lu et al. proposed a concept of average impulsive interval to describe the impulses sequences and then derived a unified synchronization criterion for directed dynamical networks with desynchronizing or synchronizing impulses. In addition, Lu et al. [42] also discussed exponential synchronization of linearly coupled neural networks with impulsive disturbances by using the average impulsive interval approach. However, cluster synchronization of general impulsive delayed dynamical networks has seldom been investigated. As indicated in [41–44], by average impulsive interval, the derived synchronization criterion of complex dynamical networks is less conservative no matter desynchronizing or synchronizing impulses. Hence, in this paper we are concerned with cluster synchronization of general hybrid-coupled delayed dynamical networks with impulsive effects using the average impulsive interval approach. To the best of our knowledge, there is still no theoretical result concerning this issue.
Motivated by the above statements, this paper aims to investigate cluster synchronization of a class of hybrid-coupled impulsive delayed dynamical networks. Based on the average impulsive interval approach and the analysis technique, some novel globally exponential cluster synchronization criteria are derived analytically. Two numerical examples are also given to show the effectiveness of the obtained theoretical results. The main contributions of this paper can be listed as follows: (1) a more general delayed coupling term involving the transmission delay and self-feedback delay is introduced in the network model. Meanwhile, the internal delay, transmission delay and self-feedback delay are all time-varying and can be different from each other. Moreover, the inner connecting matrices are not required to be diagonal, and the coupling matrices are not restricted to be symmetric or irreducible; (2) two types of impulses occurred in the nodes’ states are considered: synchronizing impulses and desynchronizing impulses; (3) the concept of average impulsive interval is utilized to describe the impulses sequences, which makes the derived cluster synchronization criteria less conservative; (4) the established cluster synchronization criteria are simultaneously valid for synchronizing and desynchronizing impulses.
2 Model and preliminaries
In this paper, we consider a general hybrid-coupled delayed dynamical network consisting of N nodes with m clusters, where each node is an n-dimensional dynamical system with time-varying delay. Without loss of generality, the sets of subscripts of these clusters are denoted by \(\mathcal {C}_1=\{1,2,\ldots ,l_1\}\), \(\mathcal {C}_2=\{l_1+1,l_1+2,\ldots ,l_1+l_2\}\), \(\dots \), \(\mathcal {C}_m=\{l_1+l_2+\cdots +l_{m-1}+1,l_1+l_2+\cdots +l_{m-1}+2,\ldots ,N\}\), i.e., \(\bigcup _{i=1}^{m} \mathcal {C}_i=\{1,2,\ldots ,N\}\). It is well known that, in many realistic networks such as neural, gene regulation, metabolic or software networks, the individual nodes in each cluster can be viewed as the identical functional units, while any pair of nodes in different clusters are essentially different according to their functions [13]. Hence, we assume that the local dynamics of individual nodes in each cluster are identical, while those of any pair of nodes in different clusters are different. According to these settings, the dynamical behavior of the complex delayed dynamical network can be described as
where \(r \in \mathfrak {R}=\big \{1,2,\ldots ,m \big \}\), \(x_i(t) = (x_{i1}(t),x_{i2}(t),\ldots ,x_{in}(t))^{\top } \in \mathbb {R}^{n}\) is the state variable of each isolated node, \(f_r :[0, +\infty )\times \mathbb {R}^{n} \times \mathbb {R}^{n}\rightarrow \mathbb {R}^{n}\) is a continuous vector-valued function governing the evolution of each individual node in the cluster \(\mathcal {C}_r\). The time delays \(\tau _r(t)\), \(\sigma _1(t)\) and \(\sigma _2(t)\) may be unknown but are bounded by known constants, i.e., \(0\le \tau _r(t)\le \tau _r\), \(0\le \sigma _1(t)\le \sigma _1\), and \(0\le \sigma _2(t)\le \sigma _2\), in which \(\tau _r(t)\) denotes the internal delay occurring inside the individual node in the cluster \(\mathcal {C}_r\), \(\sigma _1(t)\) represents the transmission delay for signal sent from node j to node i and \(\sigma _2(t)\) is the self-feedback delay. The positive constants \(c_0\) and \(c_1\) are the coupling strengths. \({\varGamma }_0 = (\gamma _{ij}^0)_{n\times n}>0\) and \({\varGamma }_1 = (\gamma _{ij}^1)_{n\times n}\) represent the inner connecting matrices. \(B^{(0)} = (b_{ij}^{(0)})_{N\times N}\) and \(B^{(1)}=(b_{ij}^{(1)})_{N\times N}\) are the coupling matrices representing the topological structure of the network, in which \(b_{ij}^{(0)}\) and \(b_{ij}^{(1)}\) are defined as follows: if node i receives direct information from node j at time t and \(t-\tau _2(t)\), respectively, then \(b_{ij}^{(0)}\ne 0\) and \(b_{ij}^{(1)}\ne 0\); otherwise, \(b_{ij}^{(0)}=0\) and \(b_{ij}^{(1)}=0\). Additionally, the diagonal elements of matrices \(B^{(0)}\) and \(B^{(1)}\) are defined by \(b_{ii}^{(l)}=-\sum _{j\,=1,j\,\ne i} b_{ij}^{(l)},\,i=1,2,\ldots ,N,\,l=0,1\), and thus, one has \(\sum _{j=1}^{N} b_{ij}^{(l)}=0\), \(i=1,2,\ldots ,N, \,l=0,1\). In general, \(B^{(0)}\) and \(B^{(1)}\) are asymmetric matrices and may not be identical. Throughout the paper, we always assume that there exist some constants \(L_r^0\) and \(L_r^{\tau }\) such that
for any x(t), \(y(t)\in \mathbb {R}^n\) and \(r \in \mathfrak {R}\).
Remark 1
The condition (2) gives some constraints on the dynamics of isolated node in the cluster \(\mathcal {C}_r\). If the function describing each node in the cluster \(\mathcal {C}_r\) satisfies uniform Lipschitz condition with respect to the time t, i.e., \(\Vert f_r(t,x(t),x(t-\tau _r(t)))-f_r(t,y(t),y(t-\tau _r(t)))\Vert \le K_r^0\Vert x(t)-y(t)\Vert +K_r^{\tau }\Vert x(t-\tau _r(t))-y(t-\tau _r(t)) \Vert \), one can select \(L_r^0=K_r^0+ \epsilon K_r^{\tau }/2\) and \(L_r^{\tau }=K_r^{\tau }/(2\epsilon )\) to satisfy the condition (2), where \(\epsilon \) is a positive constant. Additionally, it is easy to check that almost all the well-known chaotic systems with or without delay, such as the Lorenz system, Chen system, Chua’s circuit, as well as the delayed Hopfield neural networks and delayed cellular neural networks (see [21, 36] and the references therein) satisfy the form of Eq. (2).
Remark 2
In network model (1), a more general delayed coupling term is considered, where the node’s own state and neighbors’ states are affected by different delays. Meanwhile, the internal delay \(\tau _r(t)\), transmission delay \(\sigma _1(t)\) and self-feedback delay \(\sigma _2(t)\) are all time-varying and can be different from each other. Moreover, the inner connecting matrices \({\varGamma }_0\) and \({\varGamma }_1\) are not required to be diagonal, and the coupling matrices \(B^{(0)}\) and \(B^{(1)}\) are not needed to be symmetric or irreducible (i.e., the corresponding graphs generated by the matrices \(B^{(0)}\) and \(B^{(1)}\) can be directed, weakly connected and even do not contain any rooted spanning directed tree). Hence, our network model is more consistent with a real-world dynamical network.
In practice, the states of nodes in many dynamical networks are often subject to instantaneous perturbations and experience abrupt changes at certain instants due to switching phenomenon, frequency change or other sudden noise, i.e., they exhibit impulsive effects [10, 31–33, 44]. Hence, it is reasonable to assume that at time instants \(t_k\), there exist “sudden changes” (or “jumps”) in the state of node i such that
where \(\{t_1,t_2,t_3,\ldots \}\) is an impulsive sequence satisfying \(t_{k} < t_{k+1}\) and \(\lim _{k\rightarrow \infty }t_{k}=+\infty \), \(x_i(t_k^+)=\lim _{t\rightarrow t_k^+}x_i(t)\), \(x_i(t_k^-)=\lim _{t\rightarrow t_k^-}x_i(t)\), and \(d_k \in \mathbb {R}\) represents the strength of impulse. Then, we can obtain the following impulsive delayed dynamical network:
where \(Z^+=\{1,2,\ldots \}\) denotes the set of positive integer numbers and \(\sigma ^*=\max \{\sigma _1,\sigma _2,\tau ^* \}\) with \(\tau ^* = \max _{r \in \mathfrak {R}}\tau _r\). Without loss of generality, it is assumed that \(x_i(t)\) is left continuous at \(t = t_k\), i.e., \(x_i(t_k) = x_i(t_k^-)\). The initial conditions \(\varphi _i(s)\in PC\big ([-\sigma ^*,0],\mathbb {R}^n\big )\), in which \(PC\big ([-\sigma ^*, 0],\mathbb {R}^n\big )\) denotes the set of all functions of bounded variation and left continuous on any compact subinterval of \([-\sigma ^*, 0]\). To show the information communication among different clusters, we further rewrite network (4) as follows:
In this paper, we are mainly interested in studying the cluster synchronization problem for the impulsive delayed dynamical network (5) or (4). To this end, we first give the definition of cluster synchronous manifold.
Definition 1
[14] The set \(\mathcal {M} = \Big \{\big (x_1^{\top }(t),x_2^{\top }(t),\ldots ,x_N^{\top }(t) \big )^{\top }\in \mathbb {R}^{nN}: x_1(t) = x_2(t) = \cdots =x_{l_1}(t), x_{l_1+1}(t) = x_{l_1+2}(t) = \cdots = x_{l_1+l_2}(t), \ldots , x_{l_1+l_2+\cdots +l_{m-1}+1}(t) = x_{l_1+l_2+\cdots +l_{m-1}+2}(t) = \cdots = x_{N}(t) \Big \}\) is called the cluster synchronous manifold of the impulsive delayed dynamical network (5).
Definition 2
[14] The impulsive delayed dynamical network (5) with N nodes is said to realize cluster synchronization, if N nodes can be divided into m clusters as defined above such that
and
Evidently, when the impulsive delayed dynamical network (5) reaches cluster synchronization, i.e., \(\lim _{t\rightarrow +\infty }||x_i(t)-z_r(t)||=0\), \(i\in \mathcal {C}_r\), \(r \in \mathfrak {R}\), the cluster synchronized state equations can be characterized by:
where \(i\in \mathcal {C}_r\) and \(r \in \mathfrak {R}\). To discuss cluster synchronization, a prerequisite requirement is that the cluster synchronous manifold \(\mathcal {M}\) should be invariant through the impulsive delayed dynamical network (5) [14], i.e., the synchronous state \(z_r(t)\) in the same cluster should be uniform for each \(i\in \mathcal {C}_r\). In view of this, similar to [6, 11, 12, 14–18], the following assumptions are given.
Assumption 1
Suppose that the coupling matrix \(B^{(l)}\,(l=0,1)\) of dynamical network (5) has the following block form:
where each block \(B_{uv}^{(l)}=(b_{ij}^{(l)}) \in \mathbb {R}^{l_u\times \, l_v} (u,v \in \mathfrak {R})\) is a zero-row-sum matrix, i.e., \(\sum _{j\,\in \mathcal {C}_v}b_{ij}^{(l)}=0\), \(i\in \mathcal {C}_u\), and each diagonal block \(B_{uu}^{(l)}=(b_{ij}^{(l)})\in \mathbb {R}^{l_u\times \, l_u}\) satisfies \(b_{ij}^{(l)} \ge 0 (i\ne j)\) and \(b_{ii}^{(l)}=-\sum _{j\,\in \mathcal {C}_u, j\ne i} b_{ij}^{(l)}\), \(i\in \mathcal {C}_u\). In addition, rank\(\big (B_{uu}^{(0)}\big ) = l_u-1\), \(u\in \mathfrak {R}\).
Assumption 2
Suppose that there exist constants \(\alpha _r\) for \(r \in \mathfrak {R}\) such that the diagonal elements of the coupling matrix \(B^{(1)}\) of dynamical network (5) satisfy
Remark 3
Assumptions 1 and 2 ensure the cluster synchronous manifold \(\mathcal {M}\) is an invariant manifold of the impulsive delayed dynamical network (5) [14]. In general, \(b_{ij}^{(l)}>0\) (or \(<0\)), \(i \ne j\), \(l=0,1\) is viewed as the cooperative (or competitive) relationship between node i and node j [14–18]. Hence, Assumption 1 implies that nodes belonging to the same cluster only have cooperative relationships, while the nodes in different clusters can have both competitive and cooperative relationships. In addition, the matrix \(B_{uu}^{(0)}\) can be regarded as the Laplacian matrix of a weighted graph with a spanning tree, and \(B_{uu}^{(0)}\) has an eigenvalue 0 with multiplicity 1 [28, 36].
Remark 4
Actually, Assumption 2 on the coupling matrix \(B^{(1)}\) is not conservative. The reason is that if each diagonal block \(B_{uu}^{(1)}\) of the coupling matrix \(B^{(1)}\) satisfies \(b_{ij}^{(1)}\ge 0(i\ne j)\) and \(b_{ii}^{(1)}=-\sum _{j\,\in \mathcal {C}_u, j\ne i} b_{ij}^{(1)}\), \(i\in \mathcal {C}_u\), then it is easy to verify that all diagonal entries of the matrix \(\tilde{B}_{uu}^{(1)} = (\tilde{b}_{ij}^{(1)})_{l_u\times l_u}= \Big (b_{ij}^{(1)}/(\sum _{j\,\in \mathcal {C}_u, j\ne i} b_{ij}^{(1)}) \Big )_{l_u\times l_u}\) are \(-1\), and so we can design the diagonal block matrices of \(B^{(1)}\) as \(B_{uu}^{(1)}=\alpha _u \tilde{B}_{uu}^{(1)}\) for \(u\in \mathfrak {R}\), which satisfy the above assumption.
In order to study cluster synchronization of the impulsive delayed dynamical network (5), we introduce \(s_r(t) = ({1}/{l_r})\Big (\sum _{w \in \mathcal {C}_r }x_w(t)\Big )\), \(r\in \mathfrak {R}\), and define error vectors as \(e_{ir}(t)=x_i(t)-s_r(t)\), \(i\in \mathcal {C}_r\) and \(r \in \mathfrak {R}\). By Assumption 1, one has \(\sum _{j\,\in \mathcal {C}_p} b_{ij}^{(0)}{\varGamma }_0 s_p(t) = \sum _{j\,\in \mathcal {C}_p} b_{ij}^{(1)}{\varGamma }_1 s_p\big (t-\sigma _1(t)\big ) = \mathbf{0}_{n}\) for \(i = 1,2,\ldots ,N\) and \(p=1,2,\ldots ,m\), where \(\mathbf{0}_{n}\) denotes the n-dimensional vector of zeros. Hence, we get
where \(\tilde{f}_r\big (t,x_{i},s_r,x_i^{\tau _r},s_r^{\tau _r}\big )=f_r\big (t,x_i(t),x_i(t- \tau _r(t))\big )-f_r\big (t,s_r(t),s_r(t-\tau _r(t))\big )\) and \(J_r=f_r\big (t,s_r(t),s_r(t-\tau _r(t))\big )-({1}/{l_r})\sum _{w \in \mathcal {C}_r }f_r\big (t,x_{w}(t),x_w(t-\tau _r(t))\big )-({1}/{l_r})\sum _{w \in \mathcal {C}_r }\Big (c_0\sum _{j=1}^{N}b_{wj}^{(0)}\,{\varGamma }_0 x_j(t)+c_1\sum _{j=1}^{N} b_{wj}^{(1)}{\varGamma }_1 x_j(t-\sigma _1(t))\Big )\). Recall that \(x_i(t)\) is left continuous at \(t=t_k\), i.e., \(x_i(t_k)=x_i(t_k^-)\); thus, we can derive the following error dynamical system:
Obviously, if the zero solution of the error dynamical system (9) is globally exponentially stable, then globally exponential cluster synchronization of the impulsive delayed dynamical network (5) is achieved according to Definition 2.
Remark 5
It is easy to see that when \(|(1+d_k) |<1\) (i.e., the impulsive strengths \(-2<d_k<0\)), the impulses benefit to the cluster synchronization since the absolute values of the error variables are reduced. Thus, such kind of impulses are called synchronizing impulses [41]. Conversely, when \(| (1+d_k) |>1\) (i.e., the impulsive strengths \(d_k > 0\) or \(d_k < -2\)), the impulses can potentially destroy the cluster synchronization since the absolute values of the error variables are enlarged. Hence, the impulses with \(| (1+d_k) |>1\) are called desynchronizing impulses [41]. Additionally, when \(|(1+d_k)|=1\) (i.e., the impulsive strengths \(d_k=0\) or \(d_k=-2\)), the impulses are neither beneficial nor harmful for the cluster synchronization since the absolute values of the error variables remain unchanged. This kind of impulses are called inactive impulses [41]. We will not discuss inactive impulses in this paper because they have no effect on the cluster synchronization.
Definition 3
[41, 43] An impulsive sequence \(\zeta = \{t_1,t_2,t_3,\ldots \}\) is said to have average impulsive interval \(T_a\) if there exist positive integer \(\varsigma _0\) and positive number \(T_a\) such that
where \(N_\zeta (T,t)\) denotes the number of impulsive times of the impulsive sequence \(\zeta \) on the time interval (t, T), the constant \(\varsigma _0\) is called the “elasticity number” of the impulsive sequence, which implies that, on the time interval (t, T), the practical number of impulsive times \(N_\zeta (T,t)\) may be more or less than \((T-t)/T_a\) by \(\varsigma _0\).
Lemma 1
[31] If Y and Z are real matrices with appropriate dimensions, then there exists a positive constant \(\epsilon>\) 0 such that
3 Main results
For convenience, let \(\bar{ L}^{\tau }=\big (\max _{1\le r\le \, m} L_r^{\tau }\big )\), \(\bar{\alpha }=\big (\max _{1\le r\le \, m}{\alpha _r}\big )\), \(\beta _0= \max _{1\le r,\,q\le \, m,\, r\ne q}\big (\lambda _{\max }\big ( B_{rp}^{(0)} {B_{rp}^{(0)}}^{\top }\big ) \big )\), \(\beta _1= \max _{1\le r,\,q\le \,m}\big (\lambda _{\max }\big ( B_{rp}^{(1)} {B_{rp}^{(1)}}^{\top }\big ) \big )\), \(l_0=0\), \(L_m=N\), and \(L_{r-1} = \Big (\sum _{j=\,0}^{r-1}l_j\Big )\), \(r \in \mathfrak {R}\), and define the matrix \(\tilde{B}_r^{(0)}\) as \(\tilde{B}_r^{(0)}\mathop {=}\limits ^\mathrm{\Delta }\big (B_{rr}^{(0)}+{B_{rr}^{(0)}}^{\top }\big )-{\varXi }_r\), where \({\varXi }_r=\mathrm{diag}\big (\xi _{1}^{\,r},\xi _{2}^{\,r},\ldots ,\xi _{l_r}^{\,r}\big )\) with \(\xi _j^{\,r}=\sum _{u\in \mathcal {C}_r} b_{u,\,L_{\,r-1}+j}^{(0)}\), \(r \in \mathfrak {R}\). Under Assumption 1, one can easily verify that the matrix \(\tilde{B}_r^{(0)}\) is a symmetric irreducible matrix with zero-row-sum and nonnegative off-diagonal elements. This means that, for \(r \in \mathfrak {R}\), zero is an eigenvalue of \(\tilde{B}_r^{(0)}\) with multiplicity 1, and all the other eigenvalues of \(\tilde{B}_r^{(0)}\) are strictly negative [28, 36]. Hence, eigenvalues of \(\tilde{B}_r^{(0)}\) can be arranged as follows: \(0=\tilde{\lambda }_1^r>\tilde{\lambda }_2^r\ge \cdots \ge \tilde{\lambda }_{l_r}^r\) . In the following, by using the average impulsive interval approach, we will rigorously derive some globally exponential cluster synchronization criteria for the impulsive delayed dynamical network (5). The main results are stated as follows:
Theorem 1
Suppose that Assumptions 1 and 2 hold, and the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\). Then the impulsive delayed dynamical network (5) is globally exponential cluster synchronized if there exist positive constants \(\varsigma _1\), \(\varsigma _2\), \(\varsigma _3,\varsigma _4\) and d such that
-
1.
\((1+d_k)^2\le d\), \(k\in Z^+\),
-
2.
\(\varpi \mathop {=}\limits ^\mathrm{\Delta }\frac{\ln d }{ T_a }+\bar{p}+\gamma \, q<0\),
where \(q=\big (2\bar{L}^{\tau }+\bar{\alpha } c_1\varsigma _1^{-1}+\bar{\alpha } c_1\varsigma _2^{-1}+m\varsigma _4^{-1}\big )\), \(\gamma = \max \{\,d^{-\varsigma _0},1,d^{\,\varsigma _0}\}\), \(\bar{p}=\big (\max _{1\le r \le m} p_r\big )\), \(p_r=\omega _r+{\varTheta }_r \lambda ({\varTheta }_r)\), \(\omega _r=\Big (2L_r^0+{\alpha _r c_1}\varsigma _1 \lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )+{\alpha _r c_1}\varsigma _2 \lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )+{(m-1)} \varsigma _3\beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )+ (m-1)\varsigma _3^{-1}+ {m}\varsigma _4 \beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big ) \Big ) \), and \({\varTheta }_r = {c_0} \Big (\tilde{\lambda }_2^r+ \big (\max _{1\le j \le \,l_r}\xi _j^{\,r}\big )\Big )\) with
Proof
Let \(E_1(t) = \big (e_{11}^{\top }(t),\ldots ,e_{L_1,\,1}^{\top }(t)\big )^{\top }\), \(E_2(t) = \big (e_{L_1+1,\,2}^{\top }(t),\ldots ,e_{L_2,\,2}^{\top }(t)\big )^{\top }\), \(\ldots \), \(E_m(t) = \big (e_{L_{m-1}+1,\,m}^{\top }(t),\ldots ,e_{N\, m}^{\top }(t)\big )^{\top }\), \(E(t)=\big (E_1^{\top }(t),E_2^{\top }(t),\ldots ,E_m^{\top }(t)\big )^{\top }\), and construct a Lyapunov function candidate:
where \(\otimes \) denotes the Kronecker product of two matrices.
Calculating the upper Dini derivative of V(t) along the solution of Eq. (9), by using (2) and noting that \(\sum _{i\in \mathcal {C}_r} e_{ir}(t)=\mathbf{0}_{n}\), \(r \in \mathfrak {R}\), we get \(t\ne t_k\)
According to Lemma 1 and the property of the Kronecker product of the matrices [21], the following inequalities can be derived
On the other hand, since \(\tilde{B}_r^{(0)}\) is a symmetric matrix with zero row sum, there exists a unitary matrix \(U_r = (u_{1}^r,u_{2}^r\ldots ,u_{l_{r}}^r)\) with \(U_rU_r^{\top }=I_{l_r}\) such that \(\tilde{B}_r^{(0)} = U_r \mathrm{diag} (\tilde{\lambda }_1^r,\tilde{\lambda }_2^r,\ldots ,\tilde{\lambda }_{l_r}^r)U_r^{\top }\). Introduce a transformation \(Z_r(t)=(U_r^{\top }\otimes I_n)E_r(t)\), where \(Z_r(t)=\big ({z_1^r}^{\top }(t),{z_2^r}^{\top }(t),\ldots ,{z_{l_r}^r}^{\top }(t)\big )^{\top }\), \(z_j^r\in \mathbb {R}^{n}\), \(r \in \mathfrak {R}\), then one has
Note that \(\tilde{\lambda }_1^r=0\) is an eigenvalue of the matrix \(\tilde{B}_r^{(0)}\) and its corresponding eigenvector is \(u_1^r=\frac{1}{\sqrt{l_r}}\big (1,1,\ldots ,1\big )^{\top }\), then we obtain
It follows that
Substituting (13)–(16) and (19) into (12) produces
For \(t=t_k\), \(k \in Z^+\), from the second equation of (9) and condition (i), one can obtain that
In the following, based on the average impulsive interval approach, we will prove that (20), (21) and condition (ii) imply that
where \(\gamma =\max \{\,d^{-\varsigma _0},1,d^{\,\varsigma _0}\}\) and \(\lambda >0\) is the unique positive solution of the equation \(\lambda +{(\ln d)}/{ T_a} +\bar{p}+\gamma q \mathrm{e}^{\lambda \sigma ^*}=0\).
Let \(W(t)=\mathrm{e}^{-\bar{p}\,(t-t_0)} V(t)\), from (20) and (21), we know that for \(t\in (t_{k-1},t_k]\), \(k \in Z^+\),
and
For \(t\in [t_0,t_1]\), integrating inequality (23) from \(t_0\) to t, we get
and so
Similarly, for \(t\in (t_1,t_2]\), it is derived from (23), (24) and (26) that
and so
By mathematical induction, we have that for \(t\in (t_{k-1},t_k]\), \(k\in Z^+\) [45],
It follows that
Let \(N_\zeta (t,s)\) be the number of impulsive times of the impulsive sequence \(\zeta \) in the interval [s, t), then we have
Since the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\), we get
If \(0<d<1\), then it follows from (28) and (29) that
where \(\eta =-\big (\bar{p}+{(\ln d)}/{T_a}\big )\). Similarly, when \(d \ge 1\), one has from (28) and (29) that
Hence, we conclude that
Substituting (30) into (27) gives
Denote \(H(\nu )=\nu -\eta +\gamma q \mathrm{e}^{\nu \sigma ^*}\). By condition (ii), one has \(\eta -\gamma q>0\), \(\gamma q\ge 0\), and so \(H(0)<0\), \(H(+\infty )>0\) and \(\frac{d H(\nu )}{d \nu }>0\). Using the continuity and the monotonicity of \(H(\nu )\), the equation \(H(\nu )=0\) has an unique positive solution \(\lambda >0\), i.e., \(\lambda -\eta +\gamma q \mathrm{e}^{\lambda \sigma ^*}=0\). Since \(\gamma \ge 1\) and \(\lambda >0\), it is obvious that
Let \(M_0=\gamma \, \big (\sup _{t_0-\sigma ^*\, \le \, s \,\le \,t_0} V (s) \big )\). Now, we show that (22) holds, i.e, \(V(t)\le M_0 \mathrm{e}^{-\lambda (t-t_0)}\), \(t\ge t_0\). If this is not true, there must exist a \(t^{*}>t_0\) such that
Notice that \(\lambda -\eta +\gamma q \mathrm{e}^{\lambda \sigma ^*}=0\), we get from (31) and (34) that
which contradicts (33); thus, (22) holds. This means the zero solution of the error dynamical system (9) is globally exponentially stable. The proof is completed. \(\square \)
Remark 6
Based on the average impulsive interval approach, Theorem 1 presents a novel globally exponential cluster synchronization criterion for general impulsive dynamical networks with the internal delay and delayed coupling. To the best of our knowledge, there are few reports on cluster synchronization of impulsive delayed dynamical networks. In our network model, the delayed coupling term involves different transmission delay and self-feedback delay; in addition, the internal delay, transmission delay and self-feedback delay are all time-varying and can be different from each other, and the coupling matrices \(B^{(0)}\) and \(B^{(1)}\) are not assumed to be symmetric or irreducible. Hence, our theoretical results are general.
Remark 7
It can be seen that the constant d is only required to be greater than zero, no matter whether \(d < 1\) or \(d>1\). This means that the cluster synchronization criterion obtained in Theorem 1 can be applied not only to the case with \(|1+d_k|<1\) (synchronizing impulses) but also to the case with \(|1+d_k|>1\) (desynchronizing impulses). That is to say, the derived cluster synchronization criterion is simultaneously applicable for synchronizing impulses and desynchronizing impulses.
The uncertain constants \(\varsigma _1\), \(\varsigma _2\), \(\varsigma _3\), \(\varsigma _4\) and d in Theorem 1 make the results flexible in practical applications. However, inappropriate choosing of \(\varsigma _1\), \(\varsigma _2\), \(\varsigma _3\) and \(\varsigma _4\) may enlarge the value of the polynomial on the left-hand side of inequality (ii) in Theorem 1 and thus make the results conservative. Inspired by [31, 38, 43] and the extreme value theory of multivariate function, it is easy to check that a good choice of these constants is \(\varsigma _1=\varsigma _1^0=1/\sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\), \(\varsigma _2=\varsigma _2^0=1/\sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\), \(\varsigma _3=\varsigma _3^0=1/\sqrt{ \beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )}\) and \(\varsigma _4=\varsigma _4^0= 1/\sqrt{\beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big ) }\). Substituting \(\varsigma _1^0\), \(\varsigma _2^0\), \(\varsigma _3^0\) and \(\varsigma _4^0\) into Theorem 1 yields the following Corollary.
Corollary 1
Suppose that Assumptions 1 and 2 hold, and the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\). Then the impulsive delayed dynamical network (5) is globally exponential cluster synchronized if there exists a positive constant \(d>0\) such that
-
(i)
\((1+d_k)^2\le d\), \(k\in Z^+\),
-
(ii)
\(\varpi \mathop {=}\limits ^\mathrm{\Delta }\frac{\ln d }{ T_a }+\bar{p}+\gamma \, q<0\),
where \(q=\Big (2\bar{ L}^{\tau }+2\bar{\alpha }c_1 \sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}+m\sqrt{\beta _1\,\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\,\,\Big )\), \(\bar{p}=\big (\max _{1\le r \le m} p_r\big )\), \(p_r=\omega _r+{\varTheta }_r \lambda ({\varTheta }_r)\), \(\omega _r=\Big (2L_r^0+2{\alpha _r c_1}\sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}+ {2(m-1)} \sqrt{ \beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )}+ {m}\sqrt{\beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big )}\,\,\Big ) \), \({\varTheta }_r = {c_0} \Big (\tilde{\lambda }_2^r+ \big (\max _{1\le j \le \,l_r}\xi _j^{\,r}\big )\Big )\), and the other parameters are defined as those in Theorem 1.
For simplicity, we consider the impulsive strengths \(d_k\equiv d_0\), \(k\in Z^+\). Selecting \(d=(1+d_0)^2\), then conditions (i) in Corollary 1 holds. Hence, the above corollary can be reduced to the following.
Corollary 2
Suppose that Assumptions 1 and 2 hold, and the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\). Then the impulsive delayed dynamical network (5) is globally exponential cluster synchronized if the following condition holds
where \(q=\Big (2\bar{ L}^{\tau }+2\bar{\alpha }c_1 \sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}+m\sqrt{\beta _1\,\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\,\,\Big )\), \(\bar{p}=\big (\max _{1\le r \le m} p_r\big )\), \(p_r=\omega _r+{\varTheta }_r \lambda ({\varTheta }_r)\), \(\omega _r=\Big (2L_r^0+2{\alpha _r c_1}\sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}+{2(m-1)} \sqrt{ \beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )}+ {m}\sqrt{\beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big )}\,\,\Big ) \), \({\varTheta }_r = {c_0} \Big (\tilde{\lambda }_2^r+ \big (\max _{1\le j \le \,l_r}\xi _j^{\,r}\big )\Big )\), \(\gamma = \max \big \{\,(1+d_0)^{-2\varsigma _0},1,(1+d_0)^{2\varsigma _0}\big \}\), and \(\lambda ({\varTheta }_r)\) is defined as that in Theorem 1.
If only transmission delay for signal sent from node j to node i exists in the network, i.e., \(\sigma _2(t)=0\), then dynamical network (5) is simplified as the following impulsive delayed dynamical network:
For the impulsive delayed dynamical network (37), the following result can be derived based on Theorem 1 and Corollary 2.
Corollary 3
Suppose that Assumptions 1 and 2 hold, and the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\). Then the impulsive delayed dynamical network (37) is globally exponential cluster synchronized if the following condition holds
where \(q=\Big (2\bar{ L}^{\tau }+\bar{\alpha }c_1 \sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}+m\sqrt{\beta _1\,\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\,\,\Big )\), \(\bar{p} = \big (\max _{1\le r \le m} p_r\big )\), \(p_r=\omega _r+{\varTheta }_r \lambda ({\varTheta }_r)\), \(\omega _r=\Big (2L_r^0+{\alpha _r c_1}\Big (\sqrt{\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}-\lambda _{\min }\big ({\varGamma }_1+ {\varGamma }_1^\top \big )\Big )+ {2(m-1)} \sqrt{ \beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )}+ {m}\sqrt{\beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big )}\,\Big ) \), \({\varTheta }_r= {c_0} \Big (\tilde{\lambda }_2^r+ \big (\max _{1\le j \le \,l_r}\xi _j^{\,r}\big )\Big )\), \(\gamma = \max \big \{\,(1+d_0)^{-2\varsigma _0},1,(1+d_0)^{2\varsigma _0}\big \}\), and \(\lambda ({\varTheta }_r)\) is defined as that in Theorem 1.
When the node’s own state and neighbor’s states are affected by the same delay, i.e., \(\sigma _1(t)=\sigma _2(t)\), then network (5) turns to the following impulsive delayed dynamical network:
For the impulsive delayed dynamical network (39), the following Corollary can be easily derived from Theorem 1 and Corollary 2.
Corollary 4
Suppose that Assumptions 1 and 2 hold, and the impulsive sequence \(\zeta =\{t_1,t_2,t_3,\ldots \}\) satisfies (10) with average impulsive interval \(T_a\) and elasticity number \(\varsigma _0\). Then the impulsive delayed dynamical network (39) is globally exponential cluster synchronized if the following condition holds
where \(q=\Big (2\bar{ L}^{\tau }+m\sqrt{\beta _1\,\lambda _{\max }({\varGamma }_1 {\varGamma }_1^\top )}\,\,\Big )\), \(\bar{p} = \big (\max _{1\le r \le m} p_r\big )\), \(p_r=\omega _r+{\varTheta }_r \lambda ({\varTheta }_r)\), \(\omega _r=\Big (2L_r^0+ {2(m-1)} \sqrt{ \beta _0\,\lambda _{\max }\big ( {\varGamma }_0 {\varGamma }_0^{\top } \big )}+ {m}\sqrt{\beta _1\,\lambda _{\max }\big ( {\varGamma }_1 {\varGamma }_1^{\top } \big )}\,\,\Big ) \), \({\varTheta }_r= {c_0} \Big (\tilde{\lambda }_2^r+ \big (\max _{1\le j \le \,l_r}\xi _j^{\,r}\big )\Big )\), \(\gamma = \max \big \{\,(1+d_0)^{-2\varsigma _0},1,(1+d_0)^{2\varsigma _0}\big \}\), and \(\lambda ({\varTheta }_r)\) is defined as that in Theorem 1.
Remark 8
When the original impulse-free dynamical network is synchronized and the impulsive effects are harmful, in order to guarantee synchronization, the impulses should not occur too frequently. Hence, there always exists a requirement that \(\inf _{k\in Z^+}\{t_{k+1}-t_{k}\}\ge \varepsilon _1\) [32, 33], where the positive constant \(\varepsilon _1\) can be viewed as a measure to ensure the harmful impulses do not occur too frequently. Conversely, when the original impulse-free dynamical network is unsynchronized and the impulsive effects are beneficial, in order to ensure the synchronization of the dynamical network, the frequency of impulses naturally should not be too low. Therefore, there always exists an assumption that \(\sup _{k\in Z^+}\{t_{k+1}-t_{k} \}\le \varepsilon _2\) [35–38], where the positive constant \(\varepsilon _2\) is given to ensure there will be no overly long impulsive intervals. However, in this paper neither \(\inf _{k\in Z^+}\{t_{k+1}-t_{k}\}\ge \varepsilon _1\) nor \(\sup _{k\in Z^+}\{t_{k+1}-t_{k} \}\le \varepsilon _2\) are required by using the average impulsive interval \(T_a\). Since \( T_a<\sup _{k\in Z^+}\{t_{k+1}-t_{k} \} \big ( T_a>\inf _{k\in Z^+}\{t_{k+1}-t_{k} \} \big )\), our cluster synchronization criteria increase (decreases) the impulses distances of synchronizing impulses (desynchronizing impulses). Thus, results of this paper are less conservative and can be available for a wider range of impulsive signals.
Remark 9
In [41, 42], complete synchronization of impulsive dynamical networks was investigated by using the average impulsive interval approach. However, the network model presented in [41] did not include time delay; only coupled delayed neural networks with desynchronizing impulses was considered in [42]. Moreover, both the results in [41, 42] only discussed the case of dynamical networks with impulses occurred in the processes of coupling. They cannot be directly extended to the case of hybrid-coupled delayed dynamical networks with impulsive effects on the nodes’ states; another common phenomenon occurred in many realistic networks [10, 31–33, 44]. In this paper, by using the average impulsive interval approach and the analysis technique, some generic sufficient conditions for globally exponential cluster synchronization of the hybrid-coupled impulsive delayed dynamical networks with internal delay and delayed coupling (5) are established analytically, which is simultaneously effective for synchronizing and desynchronizing impulses. Thus, our theoretical results generalizes the previous works.
Remark 10
In [39, 40], global synchronization of complex dynamical networks with nonidentical nodes and coupling delays, and H \(_{\infty }\) synchronization of complex dynamical networks with coupling delays and external disturbance were studied via impulsive control, respectively. To solve the synthesis problem of impulsive controllers, the notation of \( {\mathcal {S}}(\delta _1,\delta _2) \) (i.e., \(\delta _1\le t_{k+1}-t_k \le \delta _2\), \(k\in Z^+\), where \(\delta _1\) and \(\delta _2\) represent, respectively, the lower bound and upper bound of impulsive intervals) was used to describe the impulsive sequence with nonequidistant impulsive intervals in [39, 40] and an impulsive time-dependent Lyapunov function-/functional-based method was also introduced. In this paper, similar to [41–44], the concept of average impulsive interval is adopted to describe the impulses sequences, and then some globally exponential cluster synchronization criteria are derived based on the analysis technique. Thus, the methods used in the present paper are different from the techniques employed in [39, 40].
Remark 11
In order to derive the exponential cluster synchronization criteria, in this paper, we firstly establish an impulsive differential inequality [i.e., Eqs. (20) and (21)] and then utilize the average impulsive interval approach and the analysis technique to derive the theoretical results. For establishing the impulsive differential inequality, the inequalities (13), (13) and (16) have been used to deal with the delayed coupling terms. This leads to the inner coupling matrix \({\varGamma }_1\) has no effect on the cluster synchronization, which may make the derived cluster synchronization criteria be conservative. Hence, how to obtain less conservative cluster synchronization criteria by incorporating the effect of the inner coupling matrix \({\varGamma }_1\) would be an interesting problem, which will be our future research topic.
4 Numerical examples
In this section, we provide two numerical examples to illustrate our theoretical results which are simultaneously valid for synchronizing and desynchronizing impulses. The delayed neural networks with different system parameters [29, 42] and the delayed Chua oscillators with different system parameters [21] are chosen as the isolated nodes in different clusters of dynamical network (1) in Examples 1 and 2, respectively.
The delayed neural network is described by [29, 42]
where \(x(t) = \big (x_{1}(t),\,x_{2}(t)\big )^{\top } \in \mathbb {R}^2\), \(g_0(x(t))=g_1(x(t))=\big (\mathrm{tanh}(x_1),\mathrm{tanh}(x_2)\big )^{\top } \in \mathbb {R}^2\),
and \(\sigma _1 = 2.0\), \(\sigma _3 = -5.0\), \(\sigma _4 = 3.2\), \(\upsilon _1 = -1.6\), \(\upsilon _2 = -0.1\), \(\upsilon _4 = -2.4\), and \(\tau _r(t)=\mathrm{e}^t/(1+\mathrm{e}^t)\). It is easy to verify that
where \(\tilde{\varOmega }_r=\Big ({\varOmega }_r+||{\varOmega }_0^r||I_2+( \rho _0^r/2)||{\varOmega }_1^r||I_2\Big )\), and \(L_r^0=\lambda _{\max }(\tilde{\varOmega }_r)\), \(L_r^{\tau }=||{\varOmega }_1^r||/(2 \rho _0^r)\) can be determined by choosing an appropriate parameter \(\rho _0^r>0\). Therefore, the condition (2) holds.
The dynamics of delayed Chua oscillator is [21]
where \(x(t) = \big (x_{1}(t),\,x_{2}(t),\,x_{3}(t)\big )^{\top } \in \mathbb {R}^3\), \(g_r^0(x(t)) = \big (-\frac{1}{2}\eta _0^r (m_1-m_2)(\,|x_1(t)+1|-|x_1(t)-1|\,),\, 0,\, 0 \,\big )^{\top } \in \mathbb {R}^3\), \(g_r^{\tau }\big (x(t-\tau _r(t))\big )=\big (\,0,\, 0,\,\, -\beta _0^{\,r}\varrho _0\sin \big (v_0x_1(t-\tau _r(t))\big )\,\big )^{\top } \in \mathbb {R}^3\), \(A_r= \left( {\begin{matrix} -\eta _0^r(1+m_2)\,&{} \eta _0^r \,&{} 0 \\ 1 \,&{}-1 \,&{} 1 \\ 0 \,&{} -\beta _0^{\,r} \,&{} - \omega _0^r \end{matrix}} \right) \), and \(m_1=-1.4325\), \(m_2=-0.7831\), \(v_0=0.5\), \(\varrho _0=0.2\), and \(\tau _r(t)=0.02\). It is easy to check that
where \(\tilde{A}_r=\Big (\big (A_r+A_r^{\top }\big )/{2}+\mathrm{diag}\big (|\eta _0^r(m_1-m_2)|,0,\kappa _0^r({\beta _0^{\,r}\, \varrho _0\, v_0})/2\big )\Big )\), and \(L_r^0=\lambda _{\max }(\tilde{A}_r)\), \(L_r^{\tau }=(\beta _0^{\,r} \varrho _0 v_0)/(2 \kappa _0^r)\) can be determined by choosing an appropriate parameter \(\kappa _0^r>0\). Thus, the condition (2) is satisfied.
For most real-world impulsive signals, the occurrence of impulses is not uniformly distributed. For convenience, the following special nonuniformly distributed impulsive signal is considered [41]:
which can also be rewritten as follows:
where \(k \in Z^+\), \(\epsilon _0\) and \(T_a\) are positive numbers satisfying \(\epsilon _0<T_a\), and \(N_0\) is a positive integer. As shown in [43], the elasticity number and average impulsive interval of the impulsive sequence, respectively, are \(\varsigma _0=\Big [ N_0-\frac{(N_0-1)\,\epsilon _0}{T_a}\Big ]\) and \(T_a\), where \([\cdot ]\) represents the integer function. In addition, from the structure of the impulsive signal \(\overline{\zeta }\), one can get that \( \inf _{k\in Z^+}\{t_{k+1}-t_{k} \} =\epsilon _0\) and \( \sup _{k\in Z^+}\{t_{k+1}-t_{k} \} =N_0(T_a-\epsilon _0)+\epsilon _0\) [41].
Example 1
Consider a directed network consisting of 10 nonidentical delayed neural networks (41) with synchronizing impulses, which is supposed to be divided into two clusters: \(\mathcal {C}_1=\{1,2,3,4,5\}\) and \(\mathcal {C}_2=\{6,7,8,9,10\}\). The state equations of the whole network are given by
where \(r \in \mathfrak {R}=\{1,2\}\), \({\varGamma }_0={\varGamma }_{1}=I_2\), \(c_0=2\), \(c_{1}=1\), \(\sigma _1(t)=0.5\mathrm{e}^t/(1+\mathrm{e}^t)\), and \(\sigma _2(t)=0.25 |\sin (t)|\). Here, we select \(\sigma _2^1=-0.1\), \(\upsilon _3^1=-0.18\) for the cluster \(\mathcal {C}_1\), and \(\sigma _2^2=-0.11\), \(\upsilon _3^2=-0.2\) for the cluster \(\mathcal {C}_2\). In this example, we assume that the coupling matrices \(B^{(l)} = (b_{ij}^{(l)})_{10\times 10} = \left( {\begin{matrix} B_{11}^{(l)}\,\, &{} B_{12}^{(l)} \\ B_{21}^{(l)} \,\, &{}B_{22}^{(l)} \end{matrix}} \right) \), \(l=0,1\), are characterized as follows:

Synchronizing impulsive sequence with \(T_a=0.015\), \(\epsilon _0=0.005\), \(N_0=2\) and \(d_0=-0.25\) in time interval [0 1]

Time evolutions of \(E_{ij}^1(t)=|x_{ij}(t)-s_{1j}(t)|\) (\(i \in \mathcal {C}_1, j=1,2 \)) for the first cluster of dynamical network (44) with synchronizing impulses \(d_0=-0.25\)
Obviously, \(B^{(0)}\) satisfies Assumption 1, and \(B^{(1)}\) satisfies Assumptions 1 and 2 with \(\alpha _1=1/2\), \(\alpha _2=1/3\). Selecting \(\rho _0^1=\rho _0^2=2\), then one has \(L_1^0=7.6163\), \(L_1^{\tau }=0.6060\), \(L_2^0=7.6214\) and \(L_2^{\tau }=0.6070\). By operating on computer with MATLAB, we get that \(\omega _1=24.3885\), \(\omega _2=24.0653\), \(q=3.5414\), \({\varTheta }_1=-7.0376\), \({\varTheta }_2=-7.4372\), and so \(\bar{p}=17.3509\).
Let the synchronizing impulsive strengths \(d_k\equiv d_0=-0.25\), \(k\in Z^+\), and the impulsive signal \(\overline{\zeta }\) satisfy (43) with average impulsive interval \(T_a=0.015\), \(\epsilon _0=0.005\), and \(N_0=2\). Then, we can obtain that the elasticity number of the impulsive sequence is \(\varsigma _0\)=1. It follows that \(\varpi = -14.7109<0\). By virtue of Corollary 2, it can be concluded that the impulsive delayed dynamical network (44) with the synchronizing impulses is globally exponential cluster synchronized. The initial values of the system (44) are chosen randomly for the interval [−6, 6]. Figure 1 shows the synchronizing impulses sequence, and Figs. 2 and 3 depict the time evolutions of the cluster synchronization errors of network (44). It can be observed that the dynamical network quickly achieves cluster synchronization under the synchronizing impulses.
For the impulsive signal shown in Fig. 1, the upper bound of the impulsive intervals is 0.025, i.e., \(\sup _{k\in Z^+}\{t_{k+1}-t_{k} \}=0.025\). If the upper bound of the impulsive intervals is used to derive the cluster synchronization criterion, then the cluster synchronization of the impulsive delayed dynamical network (44) can be realized when the following condition
holds. By simple computation, we get \(\varpi _{\sup }=0.6322\), and so inequality (45) is not satisfied. Hence, for this example, cluster synchronization criterion (45) derived by using \(\sup _{k\in Z^+}\{t_{k+1}-t_{k} \}\) fails to judge whether the impulsive delayed dynamical network (44) can be cluster synchronized.

Time evolutions of \(E_{ij}^2(t)=|x_{ij}(t)-s_{2j}(t)|\) (\(i \in \mathcal {C}_2, j=1,2 \)) for the second cluster of dynamical network (44) with synchronizing impulses \(d_0=-0.25\)
Example 2
In this example, we consider cluster synchronization in a directed scale-free network consisting of 300 nonidentical delayed Chua oscillators (42) with desynchronizing impulses, and suppose its nodes can be divided into three clusters: \(\mathcal {C}_1=\{1,2,\ldots ,100\}\), \(\mathcal {C}_2=\{101,102,\ldots ,200\}\), \(\mathcal {C}_3=\{201,202,\ldots ,300\}\). The state equations of the whole network are described by
where \(r \in \mathfrak {R}=\{1,2,3\}\), \({\varGamma }_0={\varGamma }_{1}=I_3\), \(c_0=9\), \(c_{1}=1\), \(\sigma _1(t)=0.25 |\sin (t)|\), and \(\sigma _2(t)=0.5\mathrm{e}^t/(1+\mathrm{e}^t)\). Here, we select \(\eta _0^1=10\), \(\beta _0^{\,1}= 19.53\), \(\omega _0^{\,1}=0.1636\) for the cluster \(\mathcal {C}_1\), \(\eta _0^2=10.25\), \(\beta _0^{\,2}= 18.53\), \(\omega _0^{\,2}= 0.2636\) for the cluster \(\mathcal {C}_2\) and \(\eta _0^3=10.50\), \(\beta _0^{\,3}=20.53\), \(\omega _0^{\,2}=0.0636\) for the cluster \(\mathcal {C}_3\). For simplicity, here the coupling matrices \(B^{(l)} = (b_{ij}^{(l)})_{300\times 300} = \left( {\begin{matrix} B_{11}^{(l)}\,\, &{} B_{12}^{(l)} \,\, &{} B_{13}^{(l)} \\ B_{21}^{(l)} \,\, &{}B_{22}^{(l)} \,\, &{} B_{23}^{(l)} \\ B_{31}^{(l)} \,\, &{} B_{32}^{(l)} \,\, &{} B_{33}^{(l)} \end{matrix}} \right) \), \(l=0,1\), are taken as follows:
where \({0}_{100\times 100}\) denotes the \(100\times 100\) matrix with all its elements being zero, \(G_1=(g_{ij}^1)_{100\times 100}\), \(G_2=(g_{ij}^2)_{100\times 100}\) and \(G_3=(g_{ij}^3)_{100\times 100}\) are the intra-coupling matrices of the three clusters with scale-free characteristics [46], \(F_r=0.1\tilde{G}_r\) with \(\tilde{G}_r=(\tilde{g}_{ij})_{100\times 100}=\Big ( g_{ij}^{(r)}/\big ( \sum _{j=1,j\,\ne i} g_{ij}^{(r)} \big ) \Big )_{100\times 100}\), \(r \in \mathfrak {R}\). Evidently, Assumptions 1 and 2 are satisfied, and \(\alpha _1=\alpha _2=\alpha _3=0.1\). Letting \(\kappa _0^1=\kappa _0^2=\kappa _0^3=3\), then one has \(L_1^0=12.0948\), \(L_1^{\tau }=0.3255\), \(L_2^0=11.7076\), \(L_2^{\tau }=0.3088\), \(L_3^0=12.7796\), and \(L_3^{\tau }=0.3422\). By operating on computer with MATLAB, we obtain that \(\omega _1=28.4854\), \(\omega _2=27.711\), \(\omega _3=29.855\), \(q=0.9802\), \({\varTheta }_1=-52.6121\), \({\varTheta }_2=-35.777\), \({\varTheta }_3=-34.0486\), and so \(\bar{p}=-4.1936\).

Desynchronizing impulsive sequence with \(T_a=0.20\), \(\epsilon _0=0.050\), \(N_0=3\) and \(d_0=0.20\) in time interval [0 4.5]

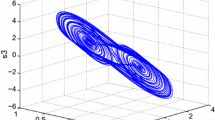
State trajectories of \(x_{i1}(t)\) (\(1\le i \le 300 \)) of dynamical network (46) with desynchronizing impulses \(d_0=0.20\)
Let the desynchronizing impulsive strengths \(d_k \equiv d_0=0.20\), \(k\in Z^+\), and the impulsive signal \(\overline{\zeta }\) satisfy (43) with average impulsive interval \(T_a=0.20\), \(\epsilon _0=0.050\), and \(N_0=3\). Then, one has \(\varsigma _0\)=2, and so \(\varpi =-0.3378\). According to Corollary 2, globally exponential cluster synchronization of the impulsive delayed dynamical network (46) with the desynchronizing impulses can be realized. The initial values of the system (46) are chosen randomly for the interval [−25, 25]. Figure 4 depicts the desynchronizing impulsive sequence, and corresponding trajectories of the impulsive delayed dynamical network are displayed in Figs. 5, 6 and 7. From the figures, it can be seen clearly that the cluster synchronization is achieved.
For the impulsive signal shown in Fig. 4, the lower bound of the impulsive interval is 0.050, i.e., \(\inf _{k\in Z^+}\{t_{k+1}-t_{k} \}=0.050\). If the lower bound of the impulsive intervals is utilized to obtain the cluster synchronization criterion, then the cluster synchronization of the impulsive delayed dynamical network (46) can be realized when the following condition
is satisfied. By simple calculation, we have \(\varpi _{\inf }=5.1318\), and so inequality (47) does not hold. Thus, for this example, cluster synchronization criterion (47) cannot be used to judge whether the impulsive delayed dynamical network (46) can be cluster synchronized if \(\inf _{k\in Z^+}\{t_{k+1}-t_{k}\}\) is utilized.

State trajectories of \(x_{i2}(t)\) (\(1\le i \le 300 \)) of dynamical network (46) with desynchronizing impulses \(d_0=0.20\)

State trajectories of \(x_{i3}(t)\) (\(1\le i \le 300 \)) of dynamical network (46) with desynchronizing impulses \(d_0=0.20\)
5 Conclusions
In this paper, a general hybrid-coupled impulsive dynamical network model with the internal delay and delay coupling is proposed, and then, the cluster synchronization of such impulsive delayed dynamical network is intensively studied. In our network model, the delayed coupling term involves different transmission delay and self-feedback delay, closer to the realistic situation. In addition, the internal delay, transmission delay and self-feedback delay are all time-varying and can be different from each other, and the coupling matrices are not needed to be symmetric or irreducible. Based on the average impulsive interval approach and the analysis technique, some novel globally exponential cluster synchronization criteria are derived. It is shown that the derived cluster synchronization criteria are simultaneously effective for synchronizing and desynchronizing impulses. Numerical examples are also given to illustrate the effectiveness of the theoretical results.
References
da Costa, L., Jr Oliveira, F., Travieso, O.N., Rodrigues, G., Boas, F.A., Antiqueira, P.R.V., Viana, L., Rocha, M.P., C, L.E.: Analyzing and modeling real-world phenomena with complex networks: a survey of applications. Adv. Phys. 60, 329–412 (2011)
Boccaletti, S., Latora, V., Moreno, Y., Chavez, M., Hwang, D.-H.: Complex networks: structure and dynamics. Phys. Rep. 424, 175–308 (2006)
Wu, C.W.: Synchronization in Complex Networks of Nonlinear Dynamical Systems. World Scientific, Singapore (2007)
Li, C., Chen, G.: Phase synchronization in small-world networks of chaotic oscillators. Phys. A 341, 73–79 (2004)
Zheng, S.: Projective synchronization in a driven-response dynamical network with coupling time-varying delay. Nonlinear Dyn. 69, 1429–1438 (2012)
Ma, Z., Liu, Z., Zhang, G.: A new method to realize cluster synchronization in connected chaotic networks. Chaos 16, 023103 (2006)
Kaneko, K.: Relevance of dynamic clustering to biological networks. Phys. D 75, 55–73 (1994)
Rulkov, N.F.: Images of synchronized chaos: experiments with circuits. Chaos 6, 262–279 (1996)
Cao, J., Li, L.: Cluster synchronization in an array of hybrid coupled neural networks with delay. Neural Netw. 22, 335–342 (2009)
Zhang, W., Tang, Y., Fang, J.-A., Zhu, W.: Exponential cluster synchronization of impulsive delayed genetic oscillators with external disturbances. Chaos 21, 043137 (2011)
Zhang, J., Ma, Z., Zhang, G.: Cluster synchronization induced by one-node clusters in networks with asymmetric negative couplings. Chaos 23, 043128 (2013)
Cai, G., Jiang, S., Cai, S., Tian, L.: Cluster synchronization of overlapping uncertain complex networks with time-varying impulse disturbances. Nonlinear Dyn. 80, 503–153 (2015)
Wang, K., Fu, X., Li, K.: Cluster synchronization in community networks with nonidentical nodes. Chaos 19, 023106 (2009)
Wu, W., Zhou, W., Chen, T.: Cluster synchronization of linearly coupled complex networks under pinning control. IEEE Trans. Circuits Syst. I(56), 829–839 (2009)
Su, H., Rong, Z., Chen, M.Z.Q., Wang, X., Chen, G., Wang, H.: Decentralized adaptive pinning control for cluster synchronization of complex dynamical networks. IEEE Trans. Cybern. 43, 394–399 (2013)
Liu, X., Chen, T.: Cluster synchronization in directed networks via intermittent pinning control. IEEE Trans. Neural Netw. 22, 1009–1020 (2011)
Cai, S., Jia, Q., Liu, Z.: Cluster synchronization for directed heterogeneous dynamical networks via decentralized adaptive intermittent pinning control. Nonlinear Dyn. 82, 689–702 (2015)
Hu, A., Cao, J., Hu, M., Guo, L.: Cluster synchronization of complex networks via event-triggered strategy under stochastic sampling. Phys. A 434, 99–110 (2015)
Huang, G., Cao, J.: Delay-dependent multistability in recurrent neural networks. Neural Netw. 23, 201–209 (2010)
Qin, H., Ma, J., Jin, W., Wang, C.: Dynamics of electric activities in neuron and neurons of network induced by autapses. Sci. China Tech. Sci. 57, 936–946 (2014)
Cai, S., Zhou, P., Liu, Z.: Pinning synchronization of hybrid-coupled directed delayed dynamical network via intermittent control. Chaos 24, 033102 (2014)
Cai, S., Liu, Z., Xu, F., Shen, J.: Periodically intermittent controlling complex dynamical networks with time-varying delays to a desired orbit. Phys. Lett. A 373, 3846–3854 (2009)
Zhou, T., Chen, L., Wang, R.: A mechanism of synchronization in interacting multi-cell genetic systems. Phys. D 211, 107–127 (2005)
Ma, J., Song, X., Tang, J., Wang, C.: Wave emitting and propagation induced by autapse in a forward feedback neuronal network. Neurocomputing 167, 378–389 (2015)
Ma, J., Qin, H., Song, X., Chu, R.: Pattern selection in neuronal network driven by electric autapses with diversity in time delays. Int. J. Mod. Phys. B 29, 1450239 (2015)
Li, C., Chen, G.: Synchronization in general complex dynamical networks with coupling delays. Phys. A 343, 263–278 (2004)
Zhou, J., Chen, T.: Synchronization in general complex delayed dynamical networks. IEEE Trans. Circuits Syst. I(53), 733–744 (2006)
Lu, W., Chen, T., Chen, G.: Synchronization analysis of linearly coupled systems described by differential equations with a coupling delay. Phys. D 221, 118–134 (2006)
He, W., Cao, J.: Exponential synchronization of hybrid coupled networks with delayed coupling. IEEE Trans. Neural Netw. 21, 571–583 (2010)
Münz, U., Papachristodoulou, A., Allgöwer, F.: Delay robustness in consensus problems. Automatica 8, 1252–1265 (2010)
Wong, W.K., Zhang, W., Tang, Y., Wu, X.: Stochastic synchronization of complex networks with mixed impulses. IEEE Trans. Circuits Syst. I(60), 2657–2667 (2013)
Yang, Z., Xu, D.: Stability analysis of delay neural networks with impulsive effects. IEEE Trans. Circuits Syst. II(52), 517–521 (2005)
Zhou, J., Xiang, L., Liu, Z.: Synchronization in complex delayed dynamical networks with impulsive effects. Phys. A 384, 684–692 (2007)
Zhang, W., Tang, Y., Wu, X., Fang, J.: Synchronization of nonlinear dynamical networks with heterogeneous impulses. IEEE Trans. Circuits Syst. I(61), 1220–1228 (2014)
Liu, B., Liu, X., Chen, G., Wang, H.: Robust impulsive synchronization of uncertain dynamical networks. IEEE Trans. Circuits Syst. I(52), 1431–1441 (2005)
Cai, S., Zhou, J., Xiang, L., Liu, Z.: Robust impulsive synchronization of complex delayed dynamical networks. Phys. Lett. A 372, 4990–4995 (2008)
Lu, J., Kurths, J., Cao, J., Mahdavi, N., Huang, C.: Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. IEEE Trans. Neural Netw. 23, 285–292 (2012)
Yang, X., Cao, J., Yang, Z.: Synchronization of coupled reaction–diffusion neural networks with time-varying delays via pinning-impulsive controller. SIAM. J. Control Optim. 51, 3486–3510 (2013)
Chen, W.-H., Jiang, Z., Zhong, J., Lu, X.: On designing decentralized impulsive controllers for synchronization of complex dynamical networks with nonidentical nodes and coupling delays. J. Frankl. Inst. 351, 4084–4110 (2014)
Chen, W.-H., Jiang, Z., Lu, X., Luo, S.: H\(_{\infty }\) synchronization for complex dynamical networks with coupling delays using distributed impulsive control. Nonlinear Anal. Hybrid Syst. 17, 111–127 (2015)
Lu, J., Ho, D.W.C., Cao, J.: A unified synchronization criterion for impulsive dynamical networks. Automatica 46, 1215–1221 (2010)
Lu, J., Ho, D.W.C., Cao, J., Kurths, J.: Exponential synchronization of linearly coupled neural networks with impulsive disturbances. IEEE Trans. Neural Netw. 22, 329–335 (2011)
Yang, X., Huang, C., Zhu, Q.: Synchronization of switched neural networks with mixed delays via impulsive control. Chaos Solitons Fractals 44, 817–826 (2011)
Cai, S., Zhou, P., Liu, Z.: Synchronization analysis of directed complex networks with time-delayed dynamical nodes and impulsive effects. Nonlinear Dyn. 76, 1677–1691 (2014)
Pan, L., Cao, J.: Exponential stability of impulsive stochastic functional differential equations. J. Math. Anal. Appl. 382, 672–685 (2011)
Barabási, A., Albert, R.: Emergence of scaling in random networks. Science 286, 509–512 (1999)
Acknowledgments
The authors sincerely thank the editor and anonymous reviewers for their valuable comments and suggestions that helped to improve the content as well as the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Science Foundation of China (Grant Nos. 11402100 and 11331009), National Science Foundation of China, Tian Yuan Special Foundation (Grant No. 11326193), Natural Science Foundation of Jiangsu Province (Grant No. BK20130535), and the Research Foundation for Advanced Talents of Jiangsu University (13JDG027).
Rights and permissions
About this article

Cite this article
Cai, S., Li, X., Jia, Q. et al. Exponential cluster synchronization of hybrid-coupled impulsive delayed dynamical networks: average impulsive interval approach. Nonlinear Dyn 85, 2405–2423 (2016). https://doi.org/10.1007/s11071-016-2834-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2834-x