
Abstract
Scientific formalizations of the notion of growth and measurement of the rate of growth in living organisms are age-old problems. The most frequently used metric, “Average Relative Growth Rate” is invariant under the choice of the underlying growth model. Theoretically, the estimated rate parameter and relative growth rate remain constant for all mutually exclusive and exhaustive time intervals if the underlying law is exponential but not for other common growth laws (e.g., logistic, Gompertz, power, general logistic). We propose a new growth metric specific to a particular growth law and show that it is capable of identifying the underlying growth model. The metric remains constant over different time intervals if the underlying law is true, while the extent of its variation reflects the departure of the assumed model from the true one. We propose a new estimator of the relative growth rate, which is more sensitive to the true underlying model than the existing one. The advantage of using this is that it can detect crucial intervals where the growth process is erratic and unusual. It may help experimental scientists to study more closely the effect of the parameters responsible for the growth of the organism/population under study.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Scientific formalization of the notion of growth in living organisms is an age-old problem. For a long time it has been a challenging issue for scientists to develop appropriate measures of growth or the rate of growth for living organisms. Such measures are receiving renewed importance in applied sciences, e.g., in zoology [1], botany [2], ecology [3], population dynamics [4], demography [5], cell dynamics [6], bacterial growth [7], finance [5] etc.
The sigmoid functions, Gompertz, General Logistic and General von Bertalanffy and their associate differential equations have applications to model self-limited population growth in diverse fields, e.g., sociology [8], fish growth [9], plant growth [10] and tumor growth [11]. Particularly in the fisheries literature much has been discussed on models using von Bertalanffy growth law, including criticisms [12, 13], testing for parameter differences [14, 15], bioenergetic applications [16] and re-parameterizations (see also [17, 18]). There have also been theoretical approaches to define a general framework to study growth models and a new family of sigmoid growth functions has been introduced, namely, Trans-General Logistic, Trans-General von Bertalanffy and Trans-Gompertz [19, 20].
Growth curve models are increasingly used in several areas of interdisciplinary research. For example, growth models play an important role in modeling the density regulation in abundance of natural populations. The growth models such as logistic, theta-logistic, Gompertz etc. have potential applications in population dynamics that may be used for predictions and forecasting extinctions. We shall mention some important applications of growth curve models in population ecology. Sibly et al. [3] fitted theta-logistic law to model the population growth rate with density to 1780 time series of 674 species belonging to four taxonomic groups, namely, birds, mammals, bony fishes and insects from the Global Population Dynamics Database [21]. Similar studies have been carried out using other growth functions as well, e.g., theta-Ricker model and Gompertz model [22]; theta-Ricker [23]; Gompertz [24]. The theta-logistic models are often collectively used in applied ecology to estimate maximum sustainable yield targets [25], temporal abundance patterns [26], the most effective wildlife management interventions [27], extinction risk [28] and epidemiological patterns [29]. But, the selection of the true model is still inconclusive [30, 31].
To understand the phenomenon of growth it is essential to understand the rate of growth associated with the process. Let us consider a growth process (X t ), (t being time), which could be cell evolution over time, time series data of population size/density, measurement of some phenotypic traits of plants/animals etc. In a particular time interval, we may distinguish two metrics associated with the growth process viz. “Absolute Growth Rate” (AGR) and “Relative Growth Rate” (RGR). AGR and RGR are defined as the rate of increment and the rate of relative increment respectively, between two time points (mathematically denoted by \(\frac {\Delta X_{t}}{\Delta t}\) and \(\frac {1}{X_{t}}\frac {\Delta X_{t}}{\Delta t}\) respectively). When they refer to a particular small instant of time (i.e., Δt → 0) they are expressed as \(\frac {\mathrm {d}X_{t}}{\mathrm {d}t}\) and \(\frac {\mathrm {d}\log X_{t}}{\mathrm {d}t}\).
A large number of growth processes are available in the quantitative theory of growth; (see [32] for a fairly comprehensive review, also see [17, 33]). Based on the RGR growth equations are usually classified into three broad categories: (a) RGR is constant (e.g., the exponential model); (b) RGR is decreasing with time (e.g., the Gompertz model); (c) RGR is decreasing with size (e.g., the logistic model). In real life, growth curves exhibit many other structures not covered by the above. Bhattacharya et al. [34] reported a fish growth experiment with a bell-shaped RGR that does not fall into the above three categories. Banik et al. [35] presented a barley biomass growth example with another unusual shape. Some other uncommon trends are observed in the demographic growth pattern in the census data from India, China and West Bengal, a state of eastern India. All these growth patterns can be captured through a generic framework, Exponential Polynomial Growth Curve Models [36, 37].
The first systematic attempt to interpret the meaning of RGR, probably the most important tool to visualize the growth phenomenon, was proposed by [38], following some earlier attempts made by [39–42]. Fisher [38] showed that whatever form of the growth curve may take, the average RGR (henceforth, ARGR) is given by the logarithmic increment of size measured at two consecutive time points. Ball and Jones [43] and [44] used the same ARGR metric but named differently, in their studies of two different growth processes. Fisher [38] proved that whatever form the growth law may take, the mathematical expression for ARGR remains unaltered.
Even in a controlled experiment, the rate of growth is rarely uniform and in general is a complicated function of time [45]. As an example Rao [45] considered AGR as a monotonic decreasing function of time during the period of growth, but replaced the original observation by initial size (X 0) and gain in growth (increments, Δ X t ). But, by the definition in most of the common growth laws, viz. Gompertz law [46], logistic law [47], Ricker growth law [48], the RGR is some monotone decreasing function of time. Thus the metric seems more appropriate if the first observation and successive differences are replaced by log(X 0) and \(\log \left (\frac {X_{t+1}}{X_{t}}\right )\) respectively. Rao [45] transformed the original time scale by a function in such a way that the growth rate is uniform with respect to the chosen time parameter.
The key observations with Fisher’s ARGR are,
-
It remains invariant under any choice of the growth law and hence may fail to identify the underlying growth model best fitted to a given data set. It depends only on the increments of the process and does not depend on the parameters of the underlying model. So, ARGR is unable to indicate the extent of proximity of the given data to a particular model.
-
As ARGR is invariant whatever the proximity of the given data to a particular model, the measurement errors affect the ARGR of different growth laws in the same amount. So the study of sensitivity of different growth laws under measurement error is not possible through ARGR.
The primary and most important aim of this paper is to construct a new metric that can be used for the characterization of the underlying true growth curve model that fits the data best (statistically) and also provide an estimate of the rate parameter corresponding to the identified model in specific time intervals. This is in contrast to employing the usual R2-criterion, which can only serve the former purpose. Recall that, ARGR may be used as an estimate of RGR, when the underlying growth law between the two given time points is exponential; since RGR remains constant for all the mutually exclusive and exhaustive time intervals. Thus it is not reasonable to use it to estimate RGR for other growth laws e.g., Power, Gompertz, Logistic, Richards etc. where RGR at any instant of time is a decreasing function of time. So, when our new metric identifies the growth law to be a differing one from the exponential, we would need a new estimator of RGR.
The problem is to obtain some law which provides a specific, analogous version of the RGR metric that remains constant for all the time intervals with respect to the choice of the underlying model. We thus seek such a metric dependant on the parameters of the assumed growth law. This metric should also be able to characterize different growth laws, which was not possible so far through Fisher’s ARGR. Thus, it should be constant over different time intervals if the underlying law is true while the extent of its variation should reflect the departure of the assumed model from the true one. We also provide a new estimator of RGR based on the underlying true model.
The different sections of the article are organized as follows: In Section 2 we develop and propose a metric of RGR and a corresponding mathematical formulation to identify the true model. We propose a general method of constructing a new estimator for RGR dictated by the adopted model. This approach is illustrated and examined using two popular growth laws, Gompertz and logistic on the data from a real life experiment of fish growth (Section 3). In addition, two new growth models are proposed that are shown to have better performance on the real data sets than Gompertz and logistic using the proposed metric (Section 4). A confirmatory check for the proposed method is provided in Section 5 using bootstrap. We discuss the effect of measurement errors on the new metric (Section 6). In Section 7 we discuss the usefulness and limitations of the proposed metric and conclude our discussion in Section 8.
2 An extended metric
The differential equation representing any growth law can be written as,
Fisher showed that ARGR i.e., \(\displaystyle \int _{t_{1}}^{t_{2}} \left (\frac {1}{X_{t}}\frac {\mathrm {d}X_{t}}{\mathrm {d}t}\right ) \, \mathrm {d} t\) reduces to \(\frac {1}{\Delta t}\log \left (\frac {X_{t_{2}}}{X_{t_{1}}}\right )\) irrespective of the choice of the growth law (whatever the form of g(t) or g(X t )). Recall that, for the exponential growth law, RGR is constant for all the time intervals and it is termed the rate parameter of the process. Hence, in this case, both RGR and ARGR have the same identical mathematical expressions. Now if we replace g(t) or g(X t ) by 1, then the solution of the (1) leads to the exponential growth law that has the form, X t = X 0 exp (bt). This occurs because, b is identical to Fisher’s ARGR for an exponential model in any specific time interval [t 1, t 2). Observe that, if we consider the estimate of b in the right-hand side of (1) for different time intervals, then it should be theoretically constant if the underlying model is true and this can be taken as an analogue of ARGR for other growth laws. We will use this simple extension to characterize different growth laws.
Definition 1
b in (1) is defined as the “Overall Rate Parameter” (ORP) when computed for the entire interval for the experimental time frame.
Definition 2
“Overall Rate Parameter” estimated on the basis of one specific time interval is called the “Interval Specific Rate Parameter” (ISRP) for that interval, which will be denoted by b(Δt).
2.1 Definition of the new metric
Richards [49] was probably the first to realize the utility of using a growth law dependent metric to measure the growth rate. He introduced a metric that depends on his well-known Richards model. He derived the growth rate as an “Average Absolute Growth Rate” per unit change of size over the entire growth process. We extend this idea by simply replacing the above AGR by RGR that yields another measure as defined below:
Definition 3
We define the “Average Rate of Relative Growth Rate (ARRGR)” over a new transformed time axis τ, defined as \(\frac {\int _{\tau _{1}}^{\tau _{2}} \left (\frac {\mathrm {d}R_{t}}{\mathrm {d}\tau }\right )\, \mathrm {d} \tau }{\tau _{2} -\tau _{1} }\), where \(R_{t} = \frac {1}{X_{t}}\frac {\mathrm {d}X_{t}}{\mathrm {d}t} = \) RGR and [\(\tau _{1}, \tau _{2}\)) is the transformed time interval from [\(t_{1}, t_{2}\)) when we consider RGR as a function of time but not size.
Definition 4
We consider the ISRP or b(Δt) specific to the model, as the weighted sum of RGR over the unit time interval and can be expressed as \(b(\Delta t) = \frac {1}{\Delta t} \displaystyle \int _{t_{1}}^{t_{2}} w(t) \left (\frac {1}{X_{t}}\frac {\mathrm {d}X_{t}}{\mathrm {d}t}\right )\, \mathrm {d} t\), where w(t) = g(t)−1 or g(X t )−1; g(t) or g(X t ) is defined as in (1) and Δt = t 2 − t 1.
2.2 Calculation of ISRP
-
1.
There are some growth laws that can be represented in the form,
$$ X_{t} = ae^{b\phi (t)} $$(2)Then ISRP can be computed as,
$$ b(\Delta t) = \frac{1}{\phi (t+\Delta t) - \phi (t)} \ln\left(\frac{X_{t+\Delta t}}{X_{t}}\right) $$(3)This immediately follows from the expression ln X t = In a + bϕ(t) obtained by taking the logarithm of (2). Using Taylor’s series expansion for ϕ(.) up to the first and second degree terms in (3), we obtain the following approximation of ISRP,
-
(a)
$$ \frac{1}{\Delta t \phi'(t)} \ln \left(\frac{X_{t+\Delta t}}{X_{t}}\right) $$(4)
-
(b)
$$ \frac{2}{\Delta t (2\phi'(t) + \phi''(t))} \ln \left(\frac{X_{t+\Delta t}}{X_{t}}\right) $$(5)
We can easily check that, exponential, power and Gompertz laws are of the form (2) and the expression for ISRP can be obtained easily.
-
(a)
-
2.
From general differential equation (1) we have the following integrated form,
$$ X_{t} = f(b, \theta, t) $$(6)where b is the ORP and θ represents other interpretable parameters determined by growth equation (6), implying that X t+Δt = f(b, θ, t + Δt), which yields,
$$ b(\Delta t) = \psi(X_{t}, X_{t+\Delta t}, \theta, t ) $$(7)for some function ψ(.)
-
3.
ISRP can be calculated in the following way also. From (1) it is implied that,
$$\begin{array}{@{}rcl@{}} {\kern-3.5pc}\displaystyle\int_{t_{1}}^{t_{2}} \frac{1}{X_{t}} \frac{\mathrm{d}X_{t}}{\mathrm{d}t} \, \mathrm{d}t&=&b \displaystyle\int_{t_{1}}^{t_{2}} g(t)\,\mathrm{d}t \end{array} $$$$\begin{array}{@{}rcl@{}} \Rightarrow b(\Delta t)&=&\frac{\displaystyle\int_{t_{1}}^{t_{2}} \left(\frac{1}{X_{t}} \frac{\mathrm{d}X_{t}}{\mathrm{d}t}\right) \, \mathrm{d}t}{\displaystyle\int_{t_{1}}^{t_{2}} g(t)\,\mathrm{d}t} \end{array} $$(8)
2.2.1 Remarks
-
1.
It is to be noted that ISRP estimated from the general differential equation (1) is mathematically identical to the Average Rate of Relative Growth Rate.
-
2.
The ISRP defined above is interval specific and does not depend on the overall rate of the process. The major advantage of using this is that it can detect the crucial interval where the growth process is erratic and unusual. It helps experimental scientists to study more closely the effect of the parameters responsible for the growth of the organism/population under study [34].
In the following we evaluate the expression of ISRP for some commonly used growth laws, Table 1.
2.3 Relation between ISRP and ARGR
ISRP in general can be written in the form,
where θ is a scalar or a vector valued parameter, excluding the ORP (b) of the law considered. ISRP takes different forms for different laws through the function ϕ(.), called the link function as it links the ISRP of a particular growth law to Fisher’s ARGR. These two parts play opposite roles to produce a combined effect towards the constant b. If we consider a growth law with decreasing RGR, then ARGR should be a decreasing function of time. This means that ϕ(θ, t) must be an increasing function of t to make ISRP a constant for all the time intervals (if the considered model is true). The irregularity or variations in ISRP are due to the ARGR component, not the link function. The link function is calculated from the estimated model and so it should be an increasing function of t. On the other hand, ARGR is calculated from the data, hence may not be a strictly decreasing function of time.
2.4 Modified estimate of RGR under the true model
Assuming linearity in growth of an organism between two consecutive time points, the estimated RGR is defined as,
and assuming exponential growth between two consecutive time points, it is defined as,
which is the ARGR as defined by [38]. So when the underlying model is logistic or Gompertz, then we can search for a better estimate of RGR that describes the true growth rate without any upward or downward bias. When the underlying model is identified through the extended metric, then there is a need to construct another set of estimates of RGR, based on the model. To derive this estimate for any time point we need the data not for just two but for three consecutive time points, since both Gompertz and logistic as described has three parameters.
-
1.
The Gompertz model is described by the differential equation:
$$ \frac{1}{X_{t}} \frac{\mathrm{d}X_{t}}{ \mathrm{d}t} = be^{-ct} $$(11)Now substituting the estimates of b and c we obtain the following new estimate of RGR
$$ \frac{1}{\Delta t} \frac{[\ln(d_1)]^{2} \ln\left[\frac{\ln(d_1)}{\ln(d_2)}\right]}{\ln\left(\frac{d_{1}}{d_{2}}\right)} $$(12)where d 1 and d 2 are defined by,
$$d_{1} = \frac{1}{X_{t}} - \frac{1}{X_{t+\Delta t}}, d_{2} = \frac{1}{X_{t+\Delta t}} - \frac{1}{X_{t+2\Delta t}} $$ -
2.
The logistic model is described by the differential equation:
$$ \frac{1}{X_{t}} \frac{\mathrm{d}X_{t}}{ \mathrm{d}t} = b\left(1 - \frac{X_{t}}{a}\right) $$(13)Now substituting the estimate of a, we obtain the following new estimate of RGR
$$ \frac{1}{\Delta t} \left(\frac{d_{1}^{*^{2}}}{d_{1}^{*}-d_{2}^{*}}\right) \ln \left(\frac{d_{1}^{*}}{d_{2}^{*}}\right) $$(14)where d 1 and d 2 are defined by, \(d_{1}^{*} = \ln \left (\frac {X_{t+\Delta t}}{X_{t}}\right ), d_{1}^{*} = \ln \left (\frac {X_{t+2\Delta t}}{X_{t+\Delta t}}\right ),\)
The derivation is given in Appendix A.
3 Performances of ISRP on data sets
3.1 An illustrative example
To study the advantages of ISRP over ARGR, we simulated growth data from the logistic and Gompertz laws, defined as,
and
respectively. The ORP for logistic and Gompertz are 0.28 and 0.18 respectively. Theoretically when the underlying model is logistic with the above stated parameters, then ISRP for different time intervals should be equal to 0.28, which is clearly visible in Fig. 1a (continuous line with circles). Now, if the data, simulated using the logistic model are fitted to some wrongly assumed law, then ISRP should vary for different time intervals. Figure 1 shows the departure of ISRP from ORP for, viz., Gompertz and exponential with logistic as the true model (Fig. 1a) and Gompertz as the true model (Fig. 1b). For many biological experiments, RGR is a decreasing function of size of some growth data, that automatically implies that RGR is a decreasing function of time also. So, when the underlying model is logistic, the Gompertz curve may also fit well in comparison to the exponential. Figure 2 suggests that, in such a case the metric is able to identify the correct growth law rejecting the wrong alternatives that show non-uniformity with respect to ORP. Thus, this new metric may work well to identify the true model when there are competing laws with similar behavior (providing a statistically good fit).

Departure of ISRP from ORP under Logistic and Gompertz growth laws. The figure (a) demonstrates that, if the data is simulated using logistic growth model, then the values of ISRP computed from logistic model will be constant over time. However, ISRP computed from other growth law eg. Gompertz or Exponential will not be constant. Similar result holds true for data if simulated using Gompertz growth model (figure (b))

The graph of a modified estimate of RGR when the underlying simulated model is known to be logistic (dotted line). The dotted line represents the estimate of RGR assuming exponential growth between two consecutive time intervals (a). (b): If the true model is contaminated by replacing only one observation 5.435020, at the 6th time point by 5.4, then modified estimates are shown. It is to be noted that, the modified estimates of RGR have some bias and that these are more sensitive to the departure of data from the true model. a Modified RGR estimate with logistic growth (15) as true model (dotted line). Estimate of ARGR (solid line). b Sensitivity of RGR estimates if a data point is replaced with a small error
3.2 Real data
Data were collected on length of fish, Cirrhinus mrigala, at 12 consecutive time points for each of the four equi-spaced directions to be referred to as A, B, C and D, emanating at 45° from the center of the lake to its four corners. At each time point 12 measurements were available. Fishes were combined in the hoop nets placed at an equal radial distance from the center in each of these directions. This design enabled us to study the variations in the growth due to variations of the directions for a specific radial distance. However, the variations in growth due to the difference in radial distances for a specific direction will not be addressed here.
3.2.1 Estimation of parameters in real data sets
We used the usual convention in denoting the vector valued parameter β in the space Θ of all admissible parameter values. Let \(\{x_{t}\}_{t=1}^{n}\) be the observed size of the individual and the distribution of x t+1 conditional on x t is assumed to be normally distributed with mean f(t, β) and variance σ 2 (f denotes the functional form of the growth law). Together with the assumption that the observations are independent, this defines a non-linear regression model. We use non-linear least squares to estimate the unknown parameter β by minimizing the residual sum of the squares function
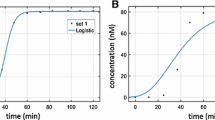
To determine an initial estimate of the parameter values close to its true value, we construct grids of parameter values in a range within which the parameter estimates should be lying. We carry out a grid search (brute force) to evaluate the residual sums-of-squares function RSS(\(\hat {\boldsymbol {\beta }}\)) for a coarse grid based on the ranges supplied for the parameters and then choose starting values of the parameters that yield the smallest value of RSS(\(\hat {\boldsymbol {\beta }}\)) [50]. Gompertz, logistic and exponential growth models are fitted to the data obtained from the four locations A, B, C and D. Red, green and blue colors denote the fit of the Gompertz, logistic and exponential models respectively (Fig. 3). The estimated parameters of the fitted models are provided in Table 2.

All three models Gompertz, Logistic and Exponential growth are fitted to the data obtained from four locations A, B, C and D. Red, green and blue colors denote the fit of Gompertz, logistic and exponential models respectively. The estimate details of parameters are provided in Table 2
4 Two new proposed growth laws
In the RGR profile of the real data sets, RGR primarily increases and then decreases with time. We propose two growth curve models that can capture such non-monotonic behavior:
A general development of such phenomenological growth curve models has been extensively studied by [51] (under preparation) and [52]. They developed a growth model where the relative growth rate is a function of time such that, up to a certain period of time RGR increases, attains a maximum and then decreases to zero (requires elucidation). The model is developed to describe the growth of fish Cirrhinus mrigala. Such growth phenomena may be observed in many natural or experimental populations where the populations may need some time to adapt to the new environment (accelerating the growth, hence increasing RGR at an initial phase). For example, in our data set, the fish population may need an adaptation period prior to starting growth, then it exhibits an accelerated growth in the initial stage, that reaches a peak and then declines to reach a steady state, or maximum size. The expressions of ISRP for the above two growth laws are (using Appendix A):
Both the models are fitted to the data from locations A, B, C and D and their comparative performances are discussed based on the ISRP metric (see Fig. 3a, b, c, d for the fit of Gompertz, logistic and exponential models and Fig. 4a, b, c, d for the fit of proposed models in locations A, B, C and D).

The extent of departure between the line of the constant rate parameter of the corresponding growth law and the estimated ISRP reflects the deviation of the assumed model from the true law. In Fig. 5 ISRP is plotted for Gompertz, logistic and two proposed models (17) and (18). Figure 5 suggests that, using the ISRP metric we can rank our preferences as model (17, 18), Gompertz and logistic. However, there is very little difference observed between the Gompertz and logistic profiles of ISRPG and ISRPL with the corresponding constant rate parameter. It can be easily observed that, model (18) is the best choice among these set of competing models in all four locations. We also observe that, in all the four locations ARGR, which is identical to ISRP for exponential law, is unable to provide any message about the underlying model while the extended metric can serve this purpose smoothly.

In a nutshell, we propose the following scheme:
-
1.
Select the set of competing models (e.g., g i i = 1, 2, …, n) for a given data set.
-
2.
Estimate the model parameters for each model (including the rate parameter, e.g., \(\mathbf {b_{i}}\)).
-
3.
Compute the model specific to ISRP, \(\hat{\mathbf{b}}_{g_{i}}(\boldsymbol {\Delta} t)\)
-
4.
Select the j th model as the best fit if \(\hat{\mathbf {b}}_{g_{j}}(\boldsymbol {\Delta} t)\) is closest to the constant line of b̂ j over time than other competing models.
5 A confirmatory test using a bootstrap technique
From the plots of ISRP (Fig. 5) for different models it is intuitively clear that, the best model is the one that has the smallest average deviation of ISRP from the estimated rate parameter. However, it requires some quantitative confirmatory check to select the best model so that researchers can adopt it as a general rule. To check the performance of different models with respect to ISRP we adopt the following procedure. From the data information, we have 12 independent vectors of observations on the length of 12 fishes. We denote the 12 independent observations by \((\mathrm {\textbf {X}}_1', \mathrm {\textbf {X}}_2', ..., \mathrm {\textbf {X}}_{12}')\), where \(\mathrm {\textbf {X}}_i'=(X_{i,1},X_{i,2},...,X_{i,12})'\) denotes the length measurement at 12 consecutive time points of the ith individual. We draw B bootstrap samples of size 12 from \((\mathrm {\textbf {X}}_1', \mathrm {\textbf {X}}_2', ..., \mathrm {\textbf {X}}_{12}')\) with replacement. For each bootstrap sample \((\mathrm {\textbf {X*}}_1', \mathrm {\textbf {X*}}_2', ..., \mathrm {\textbf {X*}}_{12}')\), we fit the model X t = f(t, β) using the non-linear regression as described in the previous section. Here X t is the average length of 12 individuals at time t. The functional form f(t, β) represents all four growth laws, Gompertz, logistic, model (17) and model (18) and β denotes the model parameters. For each model, we obtain the estimate of the rate parameter b (\(\hat {b}\)). We also estimate ISRP(t) (\(\widehat {\mbox {ISRP}(t)}\)) over different time points. Let us denote the deviation of ISRP(t) from \(\hat {b}\) by d t , i.e., \(d_{t} = \widehat {\mbox {ISRP}(t)}-\hat {b}\), for t = 1, 2, 3, ..., 12. Let, σ(d) denote the standard deviation of d = (d 1, d 2, ..., d 12)′. We compute σ(d) for each bootstrap sample and generate the bootstrap distribution of σ(d) to approximate the corresponding population density of σ(d). The bootstrap distribution is generated for each of the four models for locations A, B, C and D. We expect that, the mean of σ(d) (\(\bar {\sigma }(\textbf {d})\)) over a large bootstrap sample should be smallest for the best model.
In mathematical notation, if we compute \(\bar {\sigma }(\textbf {d})\) for two models M 1 and M 2, then \(\bar {\sigma }_{M_{1}}(\textbf {d})<\bar {\sigma }_{M_{2}}(\textbf {d})\) should imply that the model M 1 is better than the model M 2. To be more precise, we compute the bootstrap confidence intervals for the population mean of σ(d) by curtailing the lower 2.5 % and the upper 2.5 % observations from the ordered vectors of σ(d) computed from B bootstrap samples. Let us suppose that for the models M 1 and M 2, we obtain the confidence intervals of σ(d) as \(\left (d^{L}_{M_{1}},d^{H}_{M_{1}}\right )\) and \(\left (d^{L}_{M_{2}},d^{H}_{M_{2}}\right )\) respectively. The inequality \(d^{H}_{M_{1}} < d^{L}_{M_{2}}\) clearly indicates the close proximity of ISRP to the rate parameter for the model M 1 than the model M 2. Bootstrap confidence intervals are computed for Gompertz, logistic, model (17) and model (18) based on B = 1000 bootstrap replications (see Table 3). This procedure is carried out for all locations A, B, C and D (see Fig. 6). For each location the confidence interval is depicted in Fig. 7. The confidence intervals clearly suggest that the proposed model (18) gives the best fit in all locations. The bootstrap confidence intervals are provided in the table for all locations for all models with different bootstrap samples.

The bootstrap distribution of σ(d) for each of the growth models for all locations A, B, C and D based on 1000 bootstrap replications. From the bootstrap distributions of the deviations of ISRP from the constant rate parameter it is clear that proposed model 2 ISRP is closest to the corresponding rate parameter b

Bootstrap confidence intervals of the population mean of σ(d) for locations A, B, C and D for the four growth models. It is clear that the proposed model 2 has the lowest mean value of σ(d) for all locations
6 Effect of measurement errors on the extended metric
In most biological experiments it is not possible to measure the actual reading of the experimental samples. Our proposed metric ISRP may lead to adopting a wrong model due to measurement errors. So it is important to study the robustness of the metric with respect to such error under different growth laws. By extending the idea from [53], we study here the sensitivity of this metric to measurement errors.
When replicate measurements on a single individual for a given time point are not available, then through this extended method based on a fixed measurement error structure, we can study the sensitivity of ISRP under different growth laws. Suppose for any two given time points, α and β amount (unit) error is committed. To illustrate the effect or errors on ISRP for various choices of α and β, we consider the maximum ARGR interval as described below. This approach is non-stochastic in nature as there is no need to take the measurement errors to be stochastic in nature.
6.1 Non-stochastic approach
We introduce the following notations:
-
X 1 size of the first experimental units
-
\(X_{1}^{\prime } =\) minimum value of X 1 due to experimental errors
-
\(X_{1}^{\prime \prime } = \) maximum value of X 1 due to experimental errors
-
X 2 = size of the second experimental units.
-
\(X_{2}^{\prime } =\) minimum value of X 2 due to experimental errors
-
\(X_{2}^{\prime \prime } =\) maximum value of X 2 due to experimental errors
-
α = Relative error that affects X 1
-
β = Relative error that affects X 2
-
Δt = duration between two time points
-
μ r = ISRP for the r th law
-
Δμ r = Absolute error that affects μ r
-
\(\mu _{r_{1}} =\) minimum value of μ r due to experimental errors
-
\(\mu _{r_{2}} =\) maximum value of μ r due to experimental errors
-
r = growth law, e.g., exponential, linear, power, Gompertz, logistic etc.
Now let us consider that the growth law has the following product form (explained before) defined as,
Following [53] let us define,
Then putting \(X_1' = X_{1}(1-\alpha ), X_1'' = X_{1}(1+\alpha ), X_2' = X_{1}(1-\beta ), X_2'' = X_{1}(1+\beta )\), we can estimate the absolute error affecting the ISRP for various growth laws that is summarized in Table 4. To compare the sensitiveness of ISRP under measurement errors for various growth laws, we have the following theorem,
Theorem 1
Let ζ denote the class of growth laws consisting of linear, exponential, Gompertz, logistic and power. The absolute error affecting ISRP in ζ is minimum for the exponential except the linear, i.e.,
-
1.
\(\Delta \mu _{e} < \Delta \mu _{*}\), e represents exponential and * represents power(p), Gompertz(g) and logistic(lc).
-
2.
\(\Delta \mu _{e} = \Delta \mu _{l}\) if \((\alpha = \beta = 1)\)
-
3.
\(\Delta \mu _{e} > \Delta \mu _{l}\), l represents linear
-
(a)
\(\frac {X_{2}}{X_{1}} > 1 > \frac {\alpha }{\beta }\)
-
(b)
\(\frac {\alpha }{\beta } > \frac {X_{2}}{X_{1}} > 1\)
-
(c)
\(\frac {X_{2}}{X_{1}} > \frac {\alpha }{\beta } > 1\)
-
(a)
-
4.
\(\Delta \mu _{e} > \Delta \mu _{l}\) if \(1/2 \leqslant m < 1\) and \(n \geqslant 2\), where, \(\frac { \Delta \mu _{l}}{ \Delta \mu _{e}} = \left [\frac {2(\alpha + \beta )}{\ln \left (\frac {(1+\alpha )(1+\beta )}{(1-\alpha )(1-\beta )}\right )} \right ] \left [\frac {(X_{2}+X_{1})^{2}-(X_{2}-X_{1})^{2}}{(X_{2}+X_{1})^{2} - (X_{2}\beta - X_{1}\alpha )^{2}} \right ] = m.n\)
Proof
A sketch of the proof is given in Appendix B. □
Theorem 1 shows that, for any set of growth data of interest (in the class ζ), the absolute error affecting the ISRP for exponential growth law is less than that for other laws, whatever the relative error α and β may be. So when the underlying model is exponential and linear, the chance of wrong identification is minimal in comparison to the other laws in ζ, through the extended ISRP metric. The effect on the absolute error for different levels of relative errors α and β is depicted in Fig. 8 for exponential, linear and Gompertz growth laws.

Absolute error affecting the ISRP for (a) exponential, (b) linear and (c) Gompertz growth laws with respect to relative errors α and β
7 Discussion
A long history of literature is available on analyzing data using growth curve models and several advanced statistical methods have been developed to identify the true growth pattern (see [9, 54–59]). Although our scrutiny on model based ISRP looks fairly simple, we observe some important utilities (explained below) that may be employed as a model selection criterion, which are simple to implement with a powerful signature.
7.1 Utility
If the variations of the metric in different time intervals are more or less constant then it implies that the assumed underlying law is valid. So with this metric it is possible to characterize different growth laws (see illustrative example).
Along with the detection of the best fitting model for a given data set, this metric can indicate where the growth rate is erratic and unusual in the entire growth process. Such behaviors will, in turn expose the intervals where the growth process deviates from the assumed model. Based on the selected model, the proposed estimates of RGR may work better relaxing the classical linear and exponential assumptions between two time points.
RGR has one fewer parameter than its corresponding difference equation counterpart and hence may be more useful for estimation purposes. But if the plot of RGR shows high variability it may not be suitable for selecting a set of models [22]. When there is substantial variability one may require to see R2 in multiple regression to select the best model but a similar measure is not available for non-linear models [60]. Using the extended metric it may be possible to rank them by investigating the RGR profile of the corresponding growth laws. This may demonstrate a suitable model selection criterion. The model selection criterion based on ISRP estimates for a specific model depends on the deviation of ISRP from the constant rate parameter of the process.
7.2 Limitations
From the computation of the model based estimates of RGR, we observe that this method is biased towards a growth process measured continuously over time, i.e., the measured units grow monotonically over time from an initial size towards a maximum value. If the process is monotonic decreasing starting with an initial value greater than the maximum value, then modified estimates of RGR according to the method described here cannot be computed, for example, logistic (due to the logarithm in differences of population sizes, see Table 1). However, this limitation arises only in logistic and generalized logistic growth functions. Also for Gompertz law, we can always estimate ISRP for a given data set but modified RGR estimates may not be obtained due to the same reason as explained.
For growth functions where the size variable is not expressible as a function of time alone, the computation of modified RGR may not be possible. Moreover, if the growth process is driven by stochastic fluctuation, then measurements taken over time may not be monotonic in nature throughout the experiment. In this case, a modified estimate of RGR may not be computed for all intervals. Although a suitable model can be selected using non-linear regression and associated goodness of fit.
8 Conclusion
The identification of true growth law from observed data is one of the primary objectives of any growth study. Currently used ARGR metrics (linearized/ exponential) to measure the growth rate are invariant under any model. They only depend on the increment of the process. In the present work, we have proposed a metric of the growth rate that can be used to characterize the growth curve models and simultaneously provide a description on the behavior of the rate. For an exponential growth curve model, RGR is theoretically constant for all mutually exclusive and exhaustive time intervals. But, this is not the case for other more sophisticated laws where RGR is not constant (function of time /size). So, instead of RGR, some analogous quantity of RGR should be constant over time for the growth laws where RGR is a decreasing function of time. As far as we are aware, there is no literature that specifically provides a model specific estimate of RGR.
By suitably defining the ORP and ISRP we conclude that the proposed metric ISRP (with specified form) remains constant for true growth law that dictates the data being considered. Using real data sets we have illustrated this fact clearly. We have shown that, this ISRP is able to detect the time intervals where the rate is not uniform but erratic. This can help experimental scientists to detect time intervals of unusual growth that may be attributed to some fluctuations in external/ exogenous factors. The usual estimate of RGR assuming linearity or an exponential between two consecutive time points, is extended by assuming other growth models in the considered time frame. When data show proximity to a specific law then this can be treated as a more realistic and meaningful estimate of RGR.
We also observed the effect of measurement error on the metric ISRP by extending the idea from [53]. This may be a cautionary indication to the experimental scientists to adopt a wrong model for a given data set. The method described in the manuscript may be important in the study of growth measurements e.g., body mass, body length or length of different parts of the body, where models are sigmoid with an upper asymptote. The major purpose of a growth model with a conventional functional form is to capture the main qualitative features of the growth pattern and increase our conceptual understanding of how the actual pattern may be operating. But when models are compared with data in order to evaluate competing hypotheses about causal processes, the choice of functional forms for each process growth rate equation is an undesirable confounding factor. In such a case the behavior of ISRP can be examined to rank the model preferences among a set of competing models.
References
Arzate, M.E., Heras, E.H., Ramirez, L.C.: A functionally diverse population growth model. Math. Biosci. 187, 21–51 (2004)
Yeatts, F.R.: A growth-controlled model of the shape of a sunflower head. Math. Biosci. 187, 205–221 (2004)
Sibly, R.M., Barker, D., Denham, M.C., Hone, J., Pagel, M.: On the regulation of populations of mammals, birds, fish, and insects. Science 309, 607–610 (2005)
Pomerantz, M.J., Thomas, W.R., Gilpin, M.E.: Asymmetries in population growth regulated by intraspecific competition: Empirical studies and model tests. Oecologia 47(3), 311–322 (1980)
Florio, M., Colautti, S.: A logistic growth theory of public expenditures: A study of five countries over 100 years. Public Choice 122, 355–393 (2005)
Kozusko, F., Bajzer, Z.: Combining Gompertzian growth and cell population dynamics. Math. Biosci. 185, 153–167 (2003)
Baranyi, J., Pin, C.: A parallel study on bacterial growth and inactivation. J. Theor. Biol. 210, 327–336 (2001)
Fokas, N.: Growth functions, social diffusion and social change. Rev. Sociol. 13, 5–30 (2007)
Katsanevakis, S.: Modelling fish growth: model selection, multi-model inference and model selection uncertainty. Fish. Res. 81, 229–235 (2006)
Yin, X., Goudriaan, J., Lantinga, E.A., Vos, J., Spiertz, H.J.: A flexible sigmoid function of determine growth. Ann. Bot. 91, 361–371 (2003)
Bajzer, Z., Carr, T., Josic, K., Russell, S., Dingli, D.: Modeling of cancer virotherapy with recombinant measles viruses. J. Theor. Biol. 252(1), 109–122 (2008)
Day, T., Taylor, P.D.: Von Bertalanffy’s growth equation should not be used to model age and size at maturity. Am. Nat. 149(2), 381–393 (1997)
Knight, W.: Asymptotic growth: an example of nonsense disguised as mathematics. J. Fish. Res. Board Can. 25, 1303–1307 (1968)
Kimura. D.K.: Testing nonlinear regression parameters under heteroscedastic, normally distributed errors. Biometrics 46, 697–708 (1990)
Kirkwood, G.P.: Estimation of von Bertalanffy growth curve parameters using both length increment and age-length data. Can. J. Fish. Aquat. Sci. 40, 1405–1411 (1983)
Essington, T.E., Kitchell, J.F., Walters, C.J.: The von Bertalanffy growth function, bioenergentics, and the consumption rates of fish. Can. J. Fish. Aquat. Sci. 58, 2129–2138 (2001)
de Valdar. H.P.: Density-dependence as a size-independent regulatory mechanism. J. Theor. Biol. 238, 245–256 (2006)
Tjørve, E., Tjørve, K.M.C.: A unified approach to the Richards-model family for use in growth analyses: Why we need only two model forms. J. Theor. Biol. 267, 417–425 (2010)
Kozusko, F., Bourdeau, M.: A unified model of sigmoid tumour growth based on cell proliferation and quiescence. Cell Prolif. 40, 824–834 (2007)
Kozusko, F., Bourdeau, M.: Trans-theta logistics: A new family of population growth sigmoid functions. Acta Biotheor. 59, 273–289 (2011)
Imperial College NERC Centre for Population Biology: The Global Population Dynamics Database Version 2 (2010) [ http://www.sw.ic.ac.uk/cpb/cpb/gpdd.html]
Eberhardt, L.L., Breiwick, J.M., Demaster, D.P.: Analyzing population growth curves. Oikos 117, 1240–1246 (2008)
Clark, F., Brook, B.W., Delean, S., Akcakaya, H.R., Bradshaw, C.J.A.: The theta-logistic is unreliable for modeling most census data. Methods Ecol. Evol. 1, 253–262 (2010)
Knape, J., de Valpine, P.: Are patterns of density dependence in the global population dynamics database driven by uncertainty about population abundance? Ecol. Lett. 15, 17–23 (2012)
Cameron, T.C., Benton, T.G.: Stage-structured harvesting and its effects: an empirical investigation using soil mites. J. Anim. Ecol. 73, 996–1006 (2004)
Sæther, B.-E., Engen, S., Matthysen, E.: Demographic characteristics and population dynamical patterns of solitary birds. Science 295, 2070–2073 (2002)
Caughley, G., Sinclair, A.R.E.: Wildlife Ecology and Management. Blackwell Scientific, Boston, MA (1994)
Philippi, T.E., Carpenter, M.P., Case, T.J., Gilpin, M.E.: Drosophila population dynamics: chaos and extinction. Ecology 68, 154–159 (1987)
Anderson, R.M., May, R.M.: Infectious Diseases of Humans: Dynamics and Control. Oxford University Press, Oxford (1991)
Doncaster, C.P.: Comment on the regulation of populations of mammals, birds, fish, and insects iii. Science 311, 1100 (2006)
Doncaster, C.P.: Non-linear density dependence in time series is not evidence of non-logistic growth. Theor. Popul. Biol. 73, 483–489 (2008)
Zotin, A.I.: Thermodynamics and growth of organisms in ecosystems. Can. Bull. Fish. Aquat. Sci. 213, 27–37 (1985)
Tsoularis, A., Wallace, J.: Analysis of logistic growth models. Math. Biosci. 179, 21–55 (2002)
Bhattacharya, S., Sengupta, A., Basu, T.K.: Evaluation of expected absolute error affecting the maximum specific growth rate for random relative error of cell concentration. World J. Microbiol. Biotechnol. 18(3), 285–288 (2002)
Banik, P., Pramanik, P., Sarkar, R.R., Bhattacharya, S., Chattopadhayay, J.: A mathematical model on the effect of M. denticulata weed on different winter crops. Biosystems 90(3), 818–829 (2007)
Bhattacharya, S., Basu, A., Bandyopadhyay, S.: Goodness-of-fit testing for exponential polynomial growth curves. Commun. Stat. Theory Methods 38, 1–24 (2009)
Mandal, A., Huang, W.T., Bhandari, S.K., Basu, A.: Goodness-of-fit testing in growth curve models: A general approach based on finite differences. Comput. Stat. Data Anal. 55, 1086–1098 (2011)
Fisher, R.A.: Some remarks on the methods formulated in a recent article on the quantitative analysis of plant growth. Ann. Appl. Biol. 7, 367–372 (1921)
Blackman, V.H.: The compound interest law and plant growth. Ann. Bot. 33, 353–360 (1919)
Brenchley, W.: On the relations between growth and the environmental conditions of temperature and bright sunshine. Ann. Appl. Biol. 6, 211–244 (1920)
Briggs, G.E., Kidd, F., West, C.: A quantitative analysis of plant growth. Part-I. Ann. Appl. Biol. 7, 103–123 (1920)
West, C., Briggs, G.E., Kidd, F.: Methods and significant relations in the quantitative analysis of plant growth. New Phytol. 19, 200–207 (1920)
Ball, J.N., Jones, J.W.: On the growth of the brown trout of llyn tegid. Proc. Zool. Soc. London 134, 1–41 (1960)
Causton, D.R.: A computer program for fitting the Richards function. Biometrics 25, 401–409 (1969)
Rao, C.R.: Some statistical methods for comparison of growth curves. Biometrics 14, 1–17 (1958)
Gompertz, B.: On the nature of the function expressive of the law of human mortality, and on a new mode of determining the value of life contingencies. Philos. Trans. R. Soc. London 115, 513–583 (1825)
Verhulst, P.F.: Notice sur la loi que la population poursuit dans son accroissement. Correspondance mathématique et physique 10, 113–121 (1938)
Ricker, W.E.: Stock and recruitment. J. Fish. Res. Board Can. 11, 559–623 (1954)
Richards, F.J.: The quantitative analysis of growth. In: Steward, F.C. (ed.) Plant Physiology a treatise. VA. Analysis of Growth. Academic Press, London (1969)
Ritz, C., Streibig, J.C.: Nonlinear Regression with R. Springer (2008)
Bhowmick, A.R., Bhattacharya, S.: A new growth curve model for biological growth: Some inferential studies on the growth of Cirrhinus mrigala. Submitted for publication (2013)
Bhattacharya, S.: Growth Curve Modelling and Optimality Search Incorporating Chronobiological and Directional Issues for an Indian Major Carp Cirrhinus Mrigala, Ph.D. dissertation. Jadavpur University, Kolkata, India (2003)
Borzani, W.: A general equation for the evaluation of the error that affects the value of the maximum specific growth rate. World J. Microbiol. Biotechnol. 10(4), 475–476 (1994)
Chen, Y., Jackson, D.A., Harvey, H.H.: A comparison of von Bertalanffy and polynomial functions in modelling fish growth data. Can. J. Fish. Aquat. Sci. 49(6), 1228–1235 (1992)
France, J., Thornley, J.H.M.: Mathematical Models in Agriculture: Quantitative Methods for the Plant, Animal and Ecological Sciences. CABI, Oxon (2007)
Helser, T.E., Lai, H.N.: A Bayesian hierarchical meta-analysis of fish growth: with an example for north american largemouth bass, Micropterus salmoides. Ecol. Model. 178, 399–416 (2004)
Katsanevakis, S., Maravelias, C.D.: Modelling fish growth: multi-model inference as a better alternative to a priori using von Bertalanffy equation. Fish. Res. 9, 178–187 (2008)
Ratkowsky, D.A.: Nonlinear Regression Modelling: A Unified Approach. Marcel Dekker, New York (1983)
Seber, G.A.F., Wild, C.J.: Nonlinear Regression. Wiley (2003)
Eberhardt, L.L.: What should we do about hypothesis testing? J. Wildl. Manag. 67, 241–247 (2003)
Acknowledgments
Amiya Ranjan Bhowmick is supported by a research fellowship from the Council for Scientific and Industrial Research, Government of India. We are grateful to the editor-in-chief Dr. Rudi Podgornik and the two anonymous reviewers for their valuable comments and suggestions on the earlier version of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
Modified estimate of RGR For Gompertz law let us consider,
where \(t_{1}, t_{2}\) and \(t_{3}\) are consecutive time points. Then taking the ratio of the logarithm of \(\frac {X_{t_{2}}}{X_{t_{1}}}\) and \(\frac {X_{t_{3}}}{X_{t_{2}}}\) we obtain, \(\ln \left (\frac {X_{t_{2}}}{X_{t_{1}}}\right )/\ln \left (\frac {X_{t_{3}}}{X_{t_{2}}}\right )\) and this implie
where \(d_{1}\) and \(d_{2}\) are defined as in Section 2.4. Now putting this estimate into the equation of \(\frac {X_{t_{2}}}{X_{t_{1}}}\), we can get the estimate of b. Putting these estimates in the RGR equation for Gompertz law, which is \(be^{-ct_{1}}\), we can get the ISRP. Similarly for the logistic equation, the interval estimate for RGR can be calculated.
Appendix B
Proof of Theorem 1 We have,
Lemma 2
m < 1, always true.
Proof
Let, \(\psi (\beta ) = \ln \left (\frac {1+\beta }{1-\beta }\right ) - 2\beta \Rightarrow \psi ' (\beta ) = \frac {2\beta ^{2}}{1-\beta ^{2}} > 0\) as \(0<\beta <1,\) which implies ψ(β) is an increasing function in β. This implies, ψ(β) > ψ(0) and so,
Similarly,
Condition (21) and (22) implies \( \frac {2(\alpha +\beta )}{\ln \left [\frac {(1+\alpha )(1+\beta )}{(1-\alpha )(1-\beta )}\right ]} < 1 \Rightarrow m < 1 \) □
Lemma 3
X 2(1 − β) > X 1(1 − α) ⇒ n < 1
Proof
n < 1 ⇒ | X 2 − X 1 | > | X 2 β − X 1 α | ⇒ X 2(1 − β) > X 1(1 − α)
Lemma 2 and Lemma 3 imply that Δ μ e < Δ μ l if X 2(1 − β) > X 1(1 − α), i.e., if the lowest value of X 2 due to experimental errors is greater than that of X 1. Let us consider the following particular cases:
-
1.
(α = β = 1)
Then n = 1 ⇒ Δ μ e = Δ μ l
-
2.
\(\frac {X_{2}}{X_{1}} > 1 > \frac {\alpha }{\beta }\)
\(\Rightarrow X_{2}(1-\beta ) > X_{1}(1-\alpha ) \Rightarrow \Delta \mu _{e} < \Delta \mu _{l}\)
-
3.
\(\frac {\alpha }{\beta } > \frac {X_{2}}{X_{1}} > 1\)
\(\Rightarrow X_{1}\alpha - X_{2} > X_{2}\beta - X_{1} \Rightarrow X_{2}(1+\alpha ) > X_{1}(1+\beta ) \Rightarrow \Delta \mu _{e} < \Delta \mu _{l}\)
-
4.
\(\frac {X_{2}}{X_{1}} > \frac {\alpha }{\beta } > 1\)
\(\Rightarrow X_2-X_{2}\beta > X_{1} - X_{1}\alpha \Rightarrow X_{2}(1+\alpha ) > X_{1}(1+\beta ) \Rightarrow \Delta \mu _{e} < \Delta \mu _{l}\) but \(\frac {1}{2}\leq m \leq 1\) and \(n \geq 2\), then \(\Delta \mu _{e} > \Delta \mu _{l}\)
□
Lemma 4
\(\frac {\Delta \mu _{e}}{\Delta \mu _{p}} = \frac {\ln \left ( \frac {1+a(1+\Delta t)}{1+at}\right )}{\Delta t} < 1\)
Proof
We have, \(\frac {\Delta \mu _{e}}{\Delta \mu _{p}} = \frac {1}{\Delta t} \ln \left (\frac {1+a (t_{1} + \Delta t)}{1 + a t_{1}}\right ) = \frac {1}{\Delta t} \ln \left (1 + \frac {a t_{1}}{1+a t_{1}} + \frac {a \Delta t}{1 + a t_{1}}\right ) \) \(\approx \ln \left (1 + \frac {at_{1}}{1+at_{1}}\right ) (\text {when }\Delta \text {t small}) < \ln (2) < \ln (e) =1 \) □
Lemma 5
\(\frac {\Delta \mu _{e}}{\Delta \mu _{g}} < 1\)
Proof
\(\frac {\Delta \mu _{e}}{\Delta \mu _{g}} = \frac {\exp {(c\Delta t)}-1}{\Delta t c \exp {(ct_{2})}}\) Let, \(\lambda (c) = \exp {(c\Delta t)} - \Delta t c \exp {(ct_{2})} \Rightarrow \lambda '(c) = \Delta t [\exp {(c\Delta t)} - (1+ct_{2})\exp {(ct_{2})} ]\).
Now, \(t_{2} > \Delta t\) (always true) \(\Rightarrow (1+ct_{2})\exp {(ct_{2})} > \exp {(c\Delta t)}\). As \(t_{2} >0\) is always true and \(c>0\) for Gompertz law, this implies, \(\lambda '(c) < 0 \Rightarrow \lambda (c)\downarrow c \Rightarrow \lambda (c) < \lambda (0) \Rightarrow \left (\frac {\exp {(c\Delta t)}-1}{\Delta t c \exp {(ct_{2})}}\right ) < 1 \Rightarrow \frac {\Delta \mu _{e}}{\Delta \mu _{g}} < 1\) □
Lemma 6
Δμ glc − Δμ e > 0
Proof
\(\Delta \mu _{glc} - \Delta \mu _{e} = \frac {1}{2\Delta t}\ln P\). To prove the lemma, we have to prove that, P > 1. We have, \((1-\alpha ) < (1+\alpha ) \Rightarrow \left ( a^{\frac {1}{d}} - [X_{1}(1-\alpha ) ]^{\frac {1}{d}}\right ) > \left ( a^{\frac {1}{d}} - [X_{1}(1+\alpha ) ]^{\frac {1}{d}}\right ) \Rightarrow \left (\frac {\left ( a^{\frac {1}{d}} - [X_{1}(1-\alpha ) ]^{\frac {1}{d}}\right )}{\left ( a^{\frac {1}{d}} - [X_{1}(1-\alpha ) ]x^{\frac {1}{d}}\right )}\right ) >1\). Similarly, \(\left (\frac {\left ( a^{\frac {1}{d}} - [X_{1}(1-\beta ) ]^{\frac {1}{d}}\right )}{\left ( a^{\frac {1}{d}} - [X_{1}(1+\beta ) ]^{\frac {1}{d}}\right )}\right ) >1\). This too implies that, P > 1. □
Now the proof of the theorem follows easily from Lemmas 2, 3, 4, 5 and 6.
Rights and permissions
About this article
Cite this article
Bhowmick, A.R., Chattopadhyay, G. & Bhattacharya, S. Simultaneous identification of growth law and estimation of its rate parameter for biological growth data: a new approach. J Biol Phys 40, 71–95 (2014). https://doi.org/10.1007/s10867-013-9336-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10867-013-9336-6