
Abstract
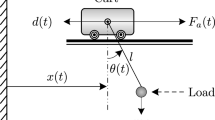
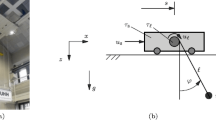
This paper presents a passivity-based control scheme for the two main axes of a 5 t-overhead crane, which guarantees both tracking of desired trajectories for the crane load and an active damping of crane load oscillations. The passivitybased control is performed by interconnection and damping assignment according to the IDA-PBC approach for underactuated systems. The tracking capabilities concerning desired trajectories for the crane load can be significantly improved by introducing feedforward control based on an inverse system model. Furthermore, a reduced-order disturbance observer is utilised for the compensation of nonlinear friction forces. In this paper, feedforward and feedback control as well as observer based disturbance compensation are adapted to the varying system parameters rope length as well as load mass by gain-scheduling techniques. Thereby, desired trajectories for the crane load position in the 3-dimensional workspace can be tracked independently with high accuracy. Experimental results of an implementation on a 5 t-crane show both excellent tracking performance with maximum tracking errors of 2 cm and a high steady-state accuracy.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

References
Aschemann, H.: Optimale Trajektorienplanung sowie modellgestütze Steuerung und Regelung für einen Brückenkran. Fortschrittberichte VDI, Reihe 8, Nr. 929, VDI Verlag, Düsseldorf (2002).
Boustany, F., d'Andrea-Novel, B.: Adaptive Control of an Overhead Crane Using Dynamic Feedback Linearization and Estimation Design. In: Proc. IEEE Int. Conf. on Robotics and Auto mation, Nice, France, pp. 1963–1968 (1992).
Janzen, A.: Passivitätsbasierte Regelung mechatronischer Systeme. Diploma thesis, University of Ulm, Germany (2006).
Lozano, R., Brogliato, B., Egeland, O., and Maschke, B.: Dissipative Systems Analysis and Control: Theory and Applications. Springer (2000).
Nguyen, H.T.: State Variable Feedback Controller for an Overhead Crane. J. Electr. Electr. Eng. 14(2), 75–84 (1994).
Rodriguez, H., Ortega, R., and Mareels, I.: A Novel Passivity-Based Controller for an Active Magnetic Bearing Benchmark Experiment. In: Proc. of the ACC 2000, Chicago, Illinois (2000).
van der Schaft, A.: L2Gain and Passivity Techniques in Nonlinear Control. Springer (2000).
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2009 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Aschemann, H. (2009). Passivity-Based Trajectory Control of an Overhead Crane by Interconnection and Damping Assignment. In: Ulbrich, H., Ginzinger, L. (eds) Motion and Vibration Control. Springer, Dordrecht. https://doi.org/10.1007/978-1-4020-9438-5_3
Download citation
DOI: https://doi.org/10.1007/978-1-4020-9438-5_3
Publisher Name: Springer, Dordrecht
Print ISBN: 978-1-4020-9437-8
Online ISBN: 978-1-4020-9438-5
eBook Packages: EngineeringEngineering (R0)