
Abstract
The first section of this paper discusses the stability and Hopf bifurcation for a new dynamical system using stability theory, the center manifold as well as normal form theory. To verify the analytical results, numerical simulations are performed. The second section focuses on controlling the Hopf bifurcation with a robust controller capable of handling a wide range of parameter values. By fine tuning the control parameters, the controller ensures that Hopf bifurcation occurred at \(P_{0}\). Furthermore, we postpone the Hopf bifurcation at \(P_{+}\) by adjusting the control parameters.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
There are several successful industrial uses for nonlinear control systems. Researchers and designers in aviation control, robotics, process control, and biomedical engineering are investigating nonlinear control approaches [1,2,3,4]. Cai and Yuan [5] proposed a hybrid control strategy with state feedback and parameter control. The results dedicated that hybrid control could chang the critical value for Hopf bifurcation. Yang and Wei [6] also proposed a nonlinear control scheme, which allowed a much parameter regain and could be extended to degenerate Hopf bifurcation. A hybrid control strategy for controlling the Hopf bifurcation in a modified hyperchaotic Lü system was proposed by Tang [7]. They were able to delay the Hopf bifurcation by selecting an appropriate parameter control, thereby extending the system’s stability range.
As evidenced by the literature, more work on Hopf bifurcation control has been done [8,9,10,11,12,13,14,15]. Du et al. [16] studied Hopf bifurcation with center manifold theorem and normal form. A washout controller was designed to control bifurcation at the equilibrium \(E_{0}\) by adjusting the controller parameters. Kim and Chang [17] proposed a new chaotic system and examined its compound structures. This paper seeks to design a controller to further delay the bifurcation at the equilibrium point \(P_{0}\) and also to extend the stability range of the system [17].
2 Stability Analysis
Consider a governing system as follows
where x, y, z are state variables, a, b and c are system parameters.
System (1) has a chaotic attractor for \( a = 2, b = 1, c = 0.6 \) as shown in Fig. 1.
The system has three equilibrium points, i.e., \( P_{0}(0,0,0), P_{+}(\sqrt{bc}, \sqrt{bc}, -b) \), and \( P_{-}(-\sqrt{bc}, -\sqrt{bc}, -b)\) if \( bc>0 \). Obviously, the equilibrium point is stable when \(a, c>0\) and \(b<0\) and unstable when \( a<0\) or \(b>0\) or \(c<0\).
The Hopf bifurcation at the equilibrium point \(P_0\), on the other hand, cannot occur. Dias et al. [19, 20] looked into the existence of invariant set of topological circles to find a good set of parameters for the equilibrium \( P_{+} \).
3 Bifurcation method
This section describes how to compute the first and the second Lyapunov coefficients, as represented by \( l_{1} \) and \( l_{2} \), respectively.
Consider the following differential equation
where \(x\in R^{4}\) are the state variables, and \(\xi \in R^{n}\) are control parameters. It is also assumed that \( f\in C^{1}[R^{4}\times R^{n}]\). If system (2) has the equilibrium point \(x = x_{0}\) at \( \xi = \xi _{0}\), and \(x = x-x_{0}\), then
F(x) is smooth and can be expressed in the Taylor series expansion as follows
where \(A = f_{x}(0,\xi _{0})\), \(i = 1,2,3,4\).
Assume A has a pair of purely imaginary eigenvalues, denoting as \(\lambda _{2,3}=\pm i\omega _{0}, (\omega _{0}>0)\) at \((x_{0},\xi _{0})\), where these eigenvalues admit no other eigenvalues with \(Re\lambda = 0\), \(p,q\in \mathbb {C}^{n}\) are vectors satisfying
For any vector in the eigenspace \(y\in T^{c}\), one can describe it as \(y = \omega q +\overline{\omega q}\), where \(\omega = \langle p, y \rangle \in \mathbb {C}\). The center manifold associated with \(\lambda _{2,3} = \pm i\omega _{0}\) is parametrized by \(\omega \) and \(\overline{\omega }\), employing an immersion with the form \( x= H(\omega , \overline{\omega })\), where \( H:\mathbb {C}^{2} \longrightarrow R^{4}\) can be expanded as follows
where \( h_{jk} \in \mathbb {C}^{4}\) and \(h_{jk} = \overline{ h_{jk}}\). Substituting the derivative of \(H(\omega ,\overline{\omega })\) into (4) yields
The vector \(h_{jk}\) can be obtained according to (9). Thus, on the center manifold, we have
where \(G_{jk} \in \mathbb {C}^{2}\). The first Lyapunov coefficient
where \(G_{21} = \langle p,H_{21} \rangle , H_{21} = C(q,q,\bar{q}) + B(\bar{q}, h_{20}) + 2B(q,h_{11}), h_{20} = (2i\omega _{0} I_{4})^{-1} B (q,q), h_{11} = -A^{-1} B(q,\bar{q}),\) and \( I_{4} \) are unit \(4\times 4\) matrices.
The second Lyapunov coefficient
where
By solving the following \(n+1\)-dimensional equation
with the condition \(\langle p, h_{21} \rangle \),the vector \(h_{21}\) can be obtained.
4 Hopf bifurcation at \(P_{0}\)(0,0,0)
Now consider the stability of \(P_{0}(0,0,0)\) in the controlled system as illustrated below:
where \( u = k_{1}(y-mv) +k_{2}(y-mv)^{2}\), \(k_{1}, k_{2}\) are the gains and m is the constant time coefficient which satisfies \(m>0\) and \( \mu (0)=0\).
The Jacobian matrix of the system (15) evaluated at \(P_{0}(0,0,0)\) is
Characteristic polynomial evaluated at the equilibrium point \(P_{0}(0,0,0)\) is
If \(c>0\), \(ab+m-k_{1}\), \(a^{2}bm<0\), and
The equilibrium point \(P_{0}\) is stable. If \(b>b_{0}\), the equilibrium point \(P_{0}\) is unstable. Equation (18) will be used to study the Hopf bifurcation at \(P_{0}\) which occurs at system (15).
The multi-linear symmetric functions of the smooth function f can be written as
The eigenvalues of matrix A are
From (8), we have
where
One also has
where
It is now only necessary to confirm the Hopf bifurcation’s transversal condition. Consider differential equations (1) with the parameter b as a dependent variable. At the crucial parameter \(b=b_{0}\), the real part of the complex eigenvalues confirms
The Hopf point’s transversal condition holds as \(\xi ^{'}(b_{0}) \ne 0\).
Theorem 1
For the differential equation (15), the first Lyapunov coefficient for the point \(P_{0}\) is as follows:
If \(l_{1}\) is greater than zero and the Hopf point transversal condition holds,then a transversal Hopf point at \(P_{0}\) exists in equation (15).
Letting \(m=0.5\), the controller is
If \(0<k_{1}<1\), a transversal Hopf point at \(P_{0}\) exists in equation (15) when \( a=2, c=4\). Furthermore, if \(k_{1}>0\), there exist a stable periodic orbit close to \(P_{0}\). The dynamical evolution as b increases is as follows:
-
1.
When \(0.2< b <1.1\), the system is stable,
-
2.
When \(1.1< b <1.4\), the system is chaotic with one periodic window in the chaotic band.
Now, if we fix \(a=2, b=1,\) and vary c, the dynamic route of the system is summarized as follows:
-
1.
If \(3.5<c<20\), the system becomes stable,
-
2.
If \(20<b<40\), Chaos exists foe this system with some periodic windows in the chaotic band,
-
3.
If \(40<c<80\), a long period-doubling bifurcation window exists.
According to the analysis performed here, the Hopf bifurcation at \(P_{0}\) cannot occur when \(b\in [1.1,1.4]\). We devise a control law with which the system (15) exhibits a Hopf bifurcation when \(b=0.8215\), illustrated in Figs. 2, 3, 4.
Let \(a=2, c=0.6, k_{1}=0.3\) and \(k_{2} = 0.1\); then, the Hopf bifurcation value can be calculated as \(b_{0} = 0.8215\). As shown in Figs. 2 and 3, the equilibrium is stable when \(b=0.6132<b_{0}\) and unstable when \(b=0.9321>b_{0}\). A transversal Hopf point at \(P_{0}\) occurs when \(b_{0} = 0.8215\) as shown in Fig. 4. By computation, one can obtain \(l_{1} = -2.59570\). As a result, the stable periodic solution that bifurcates from \(P_{0}\) is supercritical.

Trajectory of the chaotic attractor in various projections

Time history and phase trajectory of system (15) with \(a=2, b=0.6, c=4, m=0.5, k_{1}=0.3, k_{2}=0.1\)

Time history and trajectory of system (15) with \(a=2, b=0.9132, c=4, m=0.5, k_{1}=0.3, k_{2}=0.1\)

Time history and trajectory of system (15) with \(a=2, b=0.8215, c=4, m=0.5, k_{1}=0.3, k_{2}=0.1\)
5 Hopf bifurcation at \(P_{+}\)
We investigate the stability of \(P_{+}\) in system (15) in this section . The Jacobian matrix at \(P_{+}\) is
Characteristic polynomial of the matrix \(P_{+}\) is
where
If \(Q>0, R>0, S>0, T>0\) and
system (15) has transversal Hopf points at \(P_{+}\).
Dias et al.[11], found out that the equilibrium point \(P_{+}\) is stable.
The controller in this section is designed as
to set off Hopf bifurcation at \(P_{+}\).
If system (15) experiences Hopf bifurcation at the equilibrium \(P_{+}\), then condition (34) is satisfied. The multi-linear symmetric functions corresponding to f are
The eigenvalues of A are

Time history and trajectory of system (1) with \(a=2, b=1, c=4\)

Time history and trajectory of system (15) with \(a=2, b=1, c=4, m=0.5, k_{1}=0.3, k_{2}=0.1\)

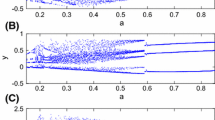
Bifurcation diagram of x in terms of parameter c (b) Lyapunov exponents spectrum

Bifurcation diagram of x in terms of parameter b (b) Lyapunov exponents spectrum
From (7), we have
Considering equation (15) depended on the parameter c, at \(c=c_{0}\) verifies
Thus, the transversal condition holds.
Theorem 2
Considering equation (15), the first Lyapunov coefficient related to \(P_{+}\) is
If \(k_{2} \ne -0.259\),then, \(l_{1} \ne 0\) which proves that (15) has transversal Hopf points at \(P_{+}\) for \(a=2,b=1\) and \(c=0.6\). The \(k_{2}\) determines the sign of the first Lyapunov coefficient. The first Lyapunov coefficient vanishes when \(k_{2} = -0.259\).
Given that
Consider system (15) for \((a,b,c,k_{1},k_{2})\), after tedious calculations, we have

Time history and trajectory of system (15) with \(a=2, b=1, c=6.1324, m=0.5, k_{1}=0.3, k_{2}=0.1\)
Theorem 3
Consider \((a,b,c,m,k_{1},k_{2}) \in \Phi \) for equation (15), the second Lyapunov coefficient related to \(P_{+}\) is
As \(l_{2}\ne 0\), system (15) has a transversal Hopf point of codimension 2 at \(P_{+}\).
Letting \( m=0.5, k_{1} = 0.3, k_{2} = 0.1\), the controller is designed as
In an uncontrolled system, \(P_{+}\) is locally stable. While comparing the controlled system (15) to the uncontrolled system (1), we can see that a transversal Hopf point exists in system (15) at \(P_{+}\) under the parameter region, shown in Figs. 5 and 6. We obtained distinct dynamical phenomena for system (1) and (15) if we fix parameters \(a=2\) and \(b=1\) and vary c in the interval [3, 4]. The bifurcation diagram in relation to parameter a and c, is shown in Figs. 7 and 8, respectively.
As we increase c, system (1) goes through the following dynamical paths:
There is a period-two orbit window when \(c\in [0,2.9] \). When \(c\in (0,3.9]\), the system becomes chaotic. When \(c=4\), a Hopf bifurcation for the uncontrolled system occurs at the equilibrium \(P +\). In Figure 9, we design a controller to make that system (15) undergoes a Hopf bifurcation when \(c=6.1324\). The analysis performed here shows that Hopf bifurcation is delayed. By calculation, \(l_{1} = -2.59570\) cab be obtained. As a result, the periodic solution that bifurcates from \(P_{+}\) is supercritical as well as stable.
6 Conclusions
The control of Hopf bifurcation for a new system is investigated in this paper. Through the use of appropriate controls, the controller is built with the desired location and properties. Numerical simulations demonstrate that supercritical Hopf bifurcation exists. The controller ensures that \(P_{0}\) undergoes a controllable Hopf bifurcation. Adjusting the controller parameters, the Hopf bifurcation at the equilibrium point \(P_{+}\) is delayed.
References
B.H.K. Lee, S.J. Price, Y.S. Wong, Nonlinear aeroelastic analysis of airfoils: bifurcation and chaos. Prog. Aerosp. Sci. 35, 205–334 (1999)
S.H. Strogatz, Nonlinear Dynamics, and chaos: with applications to physics, biology, chemistry, and engineering (CRC Press, Boca Raton, 2018)
E.N. Lorenz, Deterministic nonperiodic flow. J. Atmos. Sci. 20, 130–141 (1963)
P. Yu, G. Chen, Hopf bifurcation control using nonlinear feedback with polynomial functions. Int. J. Bifurcation Chaos 14, 1683–1704 (2004)
P. Cai, Z.Z. Yuan, Hopf bifurcation and chaos control in a new chaotic system via hybrid control strategy. Chin. J. Phys. 55, 64–70 (2017)
Z. Wei, I. Moroz, Z. Wang et al., Dynamics at infinity, degenerate Hopf and zero-Hopf bifurcation for Kingni-Jafari system with hidden attractors. Int. J. Bifurcation Chaos 26, 1650125 (2016)
J.S. Tang, Ping Cai, Z.B. Li, Controlling Hopf bifurcation of a new modified hyperchaotic Lü system. Math. Problems Eng. 2015, (2015)
Q. Yang, Z. Wei, Anti-control of Hopf bifurcation in the new chaotic system with two stable node-foci. Appl. Math. Comput. 217, 422–429 (2010)
Z. Wang, W. Sun, Z. Wei et al., Dynamics and delayed feedback control for a 3D jerk system with hidden attractor. Nonlinear Dyn. 82, 577–588 (2015)
J. Liu, J. Guan, Z. Feng, Hopf bifurcation analysis of KdV-Burgers-Kuramoto chaotic system with distributed delay feedback. Int. J. Bifurcation Chaos 29, 1950011 (2019)
A.K. Tiba, A.F. Araujo, Control strategies for Hopf bifurcation in a chaotic associative memory. Neurocomputing 323, 157–174 (2019)
C.J. Xu, Y.S. Wu, Chaos control and bifurcation behavior for a Sprott E system with distributed delay feedback. Int. J. Autom. Comput. 12, 182–191 (2015)
D.S. Chen, H.O. Wang, G. Chen, Anti-control of Hopf bifurcations. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 48, 661–672 (2001)
Y. Liu, S. Pang, D. Chen, An unusual chaotic system and its control. Math. Comput. Model. 57, 2473–2493 (2013)
C.K. Tse, Y.M. Lai, H.H.C. Iu, Hopf bifurcation and chaos in a free-running current-controlled Cuk switching regulator. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 47, 448–457 (2000)
W.J. Du, Y.D. Chu, Y.X. Chang et al., Control of Hopf bifurcation in Autonomous Systems Based on Washout Filter. J. Appl. Math. 2013, 482351 (2013)
D. Kim, P.H. Chang, A new butterfly-shaped chaotic attractor. Results Phys. 3, 14–19 (2013)
A. Wolf, J.B. Swift, H.L. Swinney et al., Determining Lyapunov exponents from a time series. Physica D 16, 285–317 (1985)
F.S. Dias, L.F. Mello, J.G. Zhang, Nonlinear analysis in a Lorenz-like system. Nonlinear Anal. Real-World Appl. 11, 34913500 (2010)
B.D. Hassard, N.D. Kazarinoff, Y. Wan, Theory and Applications of Hopf Bifurcation (Cambridge University Press, London, UK, 1981)
Acknowledgements
This research is financially supported by the National Science Foundation of China (Nos. 11772148, 11872201, 12172166).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhou, L., Kabbah, A. Hopf bifurcation and its control in a 3D autonomous system. Eur. Phys. J. Spec. Top. 231, 2115–2124 (2022). https://doi.org/10.1140/epjs/s11734-022-00488-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1140/epjs/s11734-022-00488-8