
Abstract
We propose a new concept of dynamic robust bifurcation analysis for uncertain dynamical systems. An uncertain system is described by a feedback form composed of a nonlinear dynamical system and a dynamic uncertainty that is defined by a set of differential equations. For such an uncertain system, a bifurcation point can be uncertain as well. Therefore, we formulate a dynamic robust bifurcation analysis problem of identifying the set of all potential bifurcation points. To this end, first, we study equilibrium analysis to evaluate the existence and location of equilibria. Next, we derive a condition for robust hyperbolicity of the evaluated set of potential equilibrium points. On the basis of the condition, we propose a method for identifying the set of potential bifurcation points. Finally, illustrative examples for robustness analysis of normal forms for various bifurcations are presented.
This research was done when M.I. was with FIRST, Aihara Innovative Mathematical Modelling Project, Japan Science and Technology Agency/Graduate School of Information Science and Engineering, Tokyo Institute of Technology.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
In dynamical systems theory, bifurcation phenomena have been studied extensively [1–3]. Bifurcation is a phenomenon whereby a slight parametric perturbation in a dynamical system produces qualitative changes in structure of the solutions. It can be interpreted as bifurcation that because of a slight parameter change a stable equilibrium of differential equations is suddenly destabilized, and a stable periodic orbit can arise near the equilibrium. In order to analyze such phenomena, bifurcation theory has been studied and widely used for analysis and synthesis of complex behavior in many research fields; systems biology and synthetic biology [4–14], power system analysis [15–18], epidemic model analysis [19–22], and so on. For example, bifurcation theory has contributed to recent breakthroughs in systems biology and synthetic biology. Bifurcation analysis methods have been adopted to study the functions or characteristics of artificial bio-molecular systems, such as bio-molecular oscillators [4, 10, 11] and bio-molecular switches [5, 9, 14]. In addition, the robustness of such functions is identified with the volume of a parameter region in which the system has oscillatory property or bistable equilibria.
Conventional bifurcation theory is not always applicable to the analysis and synthesis of dynamical systems with uncertainties. Bifurcation analysis methods assume that mathematical models such as differential equations are completely known. Hence, they are not applicable to dynamical systems with uncertainties, in particular, large dynamic uncertainties . However, practical systems in the real world inevitably involve not only static but dynamic uncertainties [23, 24]. In order to apply the theory to such real-world systems, bifurcation analysis methods for uncertain dynamical systems are required.
In this chapter, we study local bifurcation of an equilibrium for systems with dynamic uncertainties. Note that a bifurcation point, i.e., a parameter value on which bifurcation occurs, depends on each model in general. If a system contains uncertainties and is described by a model set, we cannot find the specific bifurcation point. Therefore, we evaluate the potential bifurcation region: the parameter region that consists of all possible bifurcation points for a given model set. In other words, the region consists of all parameter points on which bifurcation can potentially occur. Evaluating the potential bifurcation region is referred to as the dynamic robust bifurcation analysis problem in this chapter. To this end, we first propose a condition for existence of equilibria independently of uncertainties and evaluate their location. Then, we derive a condition for robust hyperbolicity of potential equilibrium points, which implies that the dimension of unstable manifolds is independent of uncertainties. We consider parameter-dependent nonlinear systems with dynamic uncertainties, and using the robust hyperbolicity condition we identify the region that contains all potential bifurcation points. Finally, illustrative examples for robustness analysis of normal forms for various types of bifurcation are presented.
Notation: The symbols \(\overline{\sigma }\{\cdot \}\) and \(\rho \{\cdot \}\) represent the maximum singular value and the spectrum radius of a matrix, respectively. \(RH_\infty \) is the space that consists of all proper and complex rational stable transfer function matrices. The \(H_\infty \) norm H infinity norm@\(H_\infty \) norm and \(L_\infty \) norm L infinity norm@\(L_\infty \) norm of a linear system \(S\) are defined by
where \(\bar{S}(s)\) is a transfer function matrix representation of \(S\). The poles (system poles) of a linear system \(\dot{x} = Ax\) are defined by the roots of the characteristic polynomial \(\phi (s):=\mathrm{det}\,(sI-A)\). In addition, a stable pole, an unstable pole, and a neutral pole are defined as poles lie in the open left half-plane, open right half-plane, and the imaginary axis of the complex plane, respectively.
2 Problem Formulation: Dynamic Robust Bifurcation Analysis
Consider the feedback system \((\Sigma ,\varDelta )\) illustrated in Fig. 1.1. In the figure, \(\varSigma \) is the nominal dynamical system composed of the linear dynamical system \(\varSigma _L\) and the nonlinear static function \({f}\). The linear system \(\varSigma _L\) is described by the state equations

Feedback representation of an uncertain dynamical system: A feedback system is composed of the linear dynamical system \(\varSigma _L\), nonlinear function \({f}\), and dynamic uncertainty \(\varDelta \)
where \({x} \in {\mathbb {R}}^n\) is the state, \({u_1}\in {\mathbb {R}}^q\) and \({u_2}\in {\mathbb {R}}^m\) are the inputs, \({y_1} \in {\mathbb {R}}^p\) and \({y_2} \in {\mathbb {R}}^\ell \) are the outputs, respectively, \(\mu \in {\fancyscript{P}}\subset {\mathbb {R}}^r\) is a static bifurcation parameter, and \(A \in \mathbb {R}^{n \times n}\), \(B_1 \in \mathbb {R}^{n \times q}\), \(B_2 \in \mathbb {R}^{n \times m}\), \(C_1 \in \mathbb {R}^{p \times n}\), \(C_2 \in \mathbb {R}^{\ell \times n}\), \(D_{11} \in \mathbb {R}^{p \times q}\), \(D_{12} \in \mathbb {R}^{p \times m}\), \(D_{21} \in \mathbb {R}^{\ell \times q}\), and \(D_{22} \in \mathbb {R}^{\ell \times m}\) are parameter-dependent matrices. The input-to-output responses of the system \(\varSigma _L\) can be characterized by the transfer function representation as follows:
where \(s \in \mathbb {C}\) and \({\bar{u}_1}(s)\), \({\bar{u}_2}(s)\), \({\bar{y}_1}(s)\), and \({\bar{y}_2}(s)\) represent the Laplace transformations of the signals \({u_1}(t)\), \({u_2}(t)\), \({y_1}(t)\), and \({y_2}(t)\), respectively. The function \({f}: {\mathbb {R}}^\ell \times {\mathbb {R}}^r \rightarrow {\mathbb {R}}^m\) is in \(C^2({\mathbb {R}}^\ell \times {\mathbb {R}}^r,{\mathbb {R}}^m)\) and satisfies
The symbol \(\varDelta \) in Fig. 1.1 expresses a dynamical system as well, but exact dynamics and even the dimension of the inner state of \(\varDelta \) are uncertain. This \(\varDelta \) is called a dynamic uncertainty. If there is no assumption on the dynamic uncertainty \(\varDelta \), it is impossible to further analyze the feedback system illustrated in Fig. 1.1. We assume that the uncertainty is in the class of linear time-invariant systems.
where \({\delta } \in {\mathbb {R}}^k\) is the state of \(\varDelta \) and the matrices \(A_d \in \mathbb {R}^{k \times k}\), \(B_d \in \mathbb {R}^{k \times p}\), \(C_d \in \mathbb {R}^{q \times k}\), and \(D_d \in \mathbb {R}^{q \times p}\) are uncertain. Then, the input-to-output responses of \(\varDelta \) can be characterized by the transfer function matrix \(\bar{\varDelta }(s):= C_d(sI-A_d)^{-1}B_d + D_d\). In addition, assume that the uncertainty \(\varDelta \) belongs to the given set of linear time-invariant systems as
Discussion below is independent of the realization of \(\varDelta \). The approach of this chapter uses only an input-output relation of the uncertainty as \(\varDelta \in {\fancyscript{U}}\). Although we assumed above that the dynamic uncertainty \(\varDelta \) is a linear dynamical system for simplifying discussion below, we can extend the results of the paper to nonlinear uncertain cases.

Bifurcation analysis: A pitchfork bifurcation diagram for a nominal dynamical system is illustrated in the left figure. A robust bifurcation diagram for an uncertain dynamical system is illustrated in the right figure, where the location and hyperbolicity of the equilibria are uncertain
For the uncertain feedback system \((\varSigma ,\varDelta )\), we consider the bifurcation analysis, i.e., qualitative change of the flow by parametric variations in \(\mu \). In this formulation, the uncertain feedback system \((\varSigma ,\varDelta )\) is described by a model set. Since a bifurcation point depends on each model, we cannot find a specific bifurcation point for such a model set (see Fig. 1.2). For uncertain dynamical systems, the location and even existence of equilibrium points are uncertain as well. We consider the following dynamic robust bifurcation analysis problem of identifying the sets of all potential bifurcation points for a given model set.
Definition 1.1
( Potential Bifurcation Region) For a given parameter region \({\fancyscript{P}}\) and a given set of dynamic uncertainties \({\fancyscript{U}}\), the potential bifurcation region \({\fancyscript{P}}_\mathrm{PB}\subseteq {\fancyscript{P}}\) is the set of parameter points that are bifurcation points of the feedback system \((\varSigma ,\varDelta )\) for some \(\varDelta \in {\fancyscript{U}}\).
Problem 1.1
( Robust Bifurcation Analysis) Consider the feedback system \((\varSigma ,\varDelta )\) and \(\varDelta \in {\fancyscript{U}}\). Then, find the potential bifurcation region \({\fancyscript{P}}_\mathrm{PB}\subseteq {\fancyscript{P}}\).
In dynamical systems theory, there is a similar concept called imperfect bifurcation [25], which is a bifurcation phenomenon for dynamical systems with small uncertainties. The uncertainties treated in the imperfect bifurcation problem are restricted to the ones represented by a finite number of uncertain parameters. Thus, our formulation covers a much wider class of uncertainties including dynamic uncertainties.
Bifurcation is defined as qualitative change of the structure of the solution in the state space by small parametric variation in \({\mu } \in {\fancyscript{P}}\) (see e.g., [3]). In such phenomena, we focus only on local bifurcation of an equilibrium. Suppose that for the feedback system \((\varSigma , \varDelta )\) and at a parameter point \(\mu _1\in {\mathbb {R}}\), the number of equilibria is constant and they are robustly hyperbolic for all \(\varDelta \in {\fancyscript{U}}\). Further suppose that at a point \(\mu _2 (\ne \mu _1)\in {\mathbb {R}}\) there exists \(\varDelta \) such that the number of equilibria is varied from the nominal system \((\varSigma ,0)\) or an equilibrium loses hyperbolicity. Then, a potential bifurcation point is included in \((\,\mu _1, \mu _2\,]\).
In addition, at a bifurcation point, an equilibrium for a dynamical system disappears or loses its hyperbolicity. Therefore, we evaluate the potential bifurcation region by finding the existence and location of an equilibrium and testifying its hyperbolicity for the feedback system \((\varSigma ,\varDelta )\). The content of the next section is composed of the three parts: Sect. 1.3.1 equilibrium analysis for the feedback system \((\varSigma ,\varDelta )\), Sect. 1.3.2 hyperbolicity analysis, and Sect. 1.3.3 a solution to the dynamic robust bifurcation analysis.
In the following, we assume that the uncertainty \(\varDelta \) is in the set of norm-bounded linear stable systems \({\fancyscript{U}}(\gamma )\) as follows:
where a positive constant \(\gamma \) is an upper bound of the maximum gain of \(\varDelta \). The set \({\fancyscript{U}}(\gamma )\) can represent signal distortions, unknown signal delays, approximation errors from PDEs to ODEs, and truncated errors of high index ODEs as long as their gains are bounded [23, 24]. Utilizing this characterization by the value of \(\gamma \), we solve the dynamic robust bifurcation analysis problem.
Some types of bifurcation phenomena, such as saddle-node bifurcation, are said to be robust. We qualitatively know the fact that if the constant \(\gamma \) is small so that \(\varDelta \in {\fancyscript{U}}(\gamma )\) has little effect to the dynamics of the feedback system \((\varSigma ,\varDelta )\), then, the same bifurcation can occur generically by parametric variations in \(\mu \). On the other hand, in this chapter, we will propose an analysis method to quantitatively evaluate the parameter points that can be a bifurcation point for some \(\varDelta \).
3 Equilibrium, Stability/Instability, and Robustness Analysis
In Sects. 1.3.1 and 1.3.2, the parameter value of \({\mu }\) is fixed at a non-bifurcation point in \({\fancyscript{P}}\). We first consider the uncertain feedback system \((\varSigma ,\varDelta )\) to derive an existence condition for an equilibrium \([\,{x_e}^\mathsf{T}\, {\delta _e}^\mathsf{T}\,]^\mathsf{T}\). Then, we derive a robust hyperbolicity condition for nonlinear systems with uncertainty-dependent equilibria.
3.1 Equilibrium Analysis
We evaluate the existence and location of equilibria in an uncertain feedback system \((\varSigma ,\varDelta )\). They are dependent on the steady-state gain of \(\varDelta \), i.e., \(\bar{\varDelta }(0)\). To this end, we make an assumption on the system \(\varSigma _L\).
(A1) \(\varSigma _L\) has no neutral poles.
The assumption A1, i.e., hyperbolicity of the origin of \(\varSigma _L\), is a technical assumption that is used only for simplifying an existence condition of equilibria. This assumption can be satisfied in any uncertain feedback system applying the loop transformation technique to the feedback loop in \(\varSigma _L\) and \({f}\).
If A1 holds, the matrix \(A({\mu })\) is nonsingular. Then, we can evaluate the steady state gain of \(\bar{\varSigma }_L(s)\) as
The steady state gain of \(\bar{\varDelta }(s)\) can also be defined as
We focus on the steady state output \({y_2} = {y_{2e}}\) to derive an existence condition for an equilibrium \([\,{x_{e}}^\mathsf{T}\, {\delta _{e}}^\mathsf{T}\,]^\mathsf{T}\). In the following, we consider the static nonlinear equation
where \(D_0\in {\mathbb {R}}^{q\times p}\) is a constant matrix and \(F_\mathrm{u}(X,Y)\) is the upper LFT representation of matrices \(X\) and \(Y\) as follows:
We also define the matrix
to state the conditions of a theorem. We derive a condition for the existence of equilibria as follows.
Theorem 1.1
For a given \(\gamma >0\), assume that A1 and \(\bar{\sigma }\{\bar{\varSigma }_{L11}(0)\} < 1/\gamma \). Then, for a fixed \({\mu } \in {\fancyscript{P}}\), (T1) holds.
-
(T1)
The feedback system \((\varSigma ,\varDelta )\) has no equilibrium for all \(\varDelta \in {{\fancyscript{U}}}(\gamma )\) if and only if (1.3) admits no real solution for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\).
In addition, suppose that the matrix \(M(D_0)\) is of full column rank for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\). Then, (T2) holds.
-
(T2)
The feedback system \((\varSigma ,\varDelta )\) has \(N (\ge 0)\) isolated equilibria for all \(\varDelta \in {{\fancyscript{U}}}(\gamma )\) if and only if (1.3) admits \(N\) isolated real solutions \({y_2} = {y_{2}}(D_0)\) for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\).
Proof
From A1, at the steady state, we have
From the assumption that \(\bar{\sigma }\{\bar{\varSigma }_{L11}(0)\} < 1/\gamma \) holds, the matrix \(F_\mathrm{u}(\bar{\Sigma }_L(0),D_0)\) is well-defined, and we can derive the static equations (1.3) and
Then, for fixed \(\bar{\varDelta }(0)\) and \({\mu }\), all equilibria \([\,x_{e}^\mathsf{T}\, \delta _{e}^\mathsf{T}\,]^\mathsf{T}\) can be parametrized only by the steady state output \(y_{2e}\) as (1.4) and (1.5). The existence of a real solution \({y_{2e}}\) of (1.3) is equivalent to the existence of an equilibrium \([\,{x_{e}}^\mathsf{T}\, {\delta _{e}}^\mathsf{T}\,]^\mathsf{T}\). From this equivalence, we can prove (T1).
By using the representation \(M(D_0)\), the equilibrium \({x_e}\) of (1.4) can be written as \({x_e} = -A^{-1}({\mu })M(\bar{\varDelta }(0)){f}({y_{2e}})\). From the assumption that \(M(D_0)\) is of full column rank for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\), the map from \({f}({y_{2e}})\) to \({x_e}\) is one-to-one. In other words, two equilibria \({x_e}\) and \({x_e'}(\ne {x_e})\) are distinguishable by two vectors \({f}({y_{2e}},{\mu })\) and \({f}({y_{2e}'},{\mu }) (\ne {f}({y_{2e}},{\mu }))\). In addition, a solution of the static equation (1.3) is determined by an intersection of linear and nonlinear functions. Then, \({f}({y_{2e}},{\mu }) \ne {f}({y_{2e}'},{\mu })\) if and only if \({y_{2e}} \ne {y_{2e}'}\). The number of the isolated real solutions \({y_{2e}}\) of (1.3) is equivalent to that of the isolated equilibria \({x_e}\). This completes the proof of Theorem 1.1.\(\square \)
A solution of the static equation (1.3) with \(D_0 = \varDelta (0) \in {\fancyscript{U}}_0(\gamma )\) is denoted by \({y_{2ei}}(\varDelta )\), \(i = \{1,2,\ldots , N\}\). The sets of such potential steady state outputs \({y_{2ei}}(\varDelta )\), \(i = \{1,2,\ldots , N\}\) for all \(\varDelta \in {\fancyscript{U}}(\gamma )\) are denoted by
In the next subsection, we analyze hyperbolicity of the equilibria determined by the elements of \({\fancyscript{Y}}_{2ei}(\gamma )\).
To evaluate the set \({\fancyscript{Y}}_{2ei}(\gamma )\), we need to solve the nonlinear static equation (1.3) for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\). In general, it is hard to precisely solve such equations. However, in the case that \({f}\) is monotonic, we can easily solve the equation. See the following two remarks and two examples with single-input and single-output nonlinear feedback systems.
Remark 1.1
Assume that \(f(y_2,\mu )\), \(y_2 \ge 0\), \(\ell = m = 1\) is a positive and monotonically decreasing function as illustrated in Fig. 1.3. In that case, there exists a unique equilibrium. In addition, we can evaluate \({\fancyscript{Y}}_{2e1}(\gamma )\) as follows. First, we evaluate the range of the function
for all \(d_0 \in [\,-\gamma , \gamma \,]\). If \(\min h(d_0) > 0\) holds, then \({\fancyscript{Y}}_{2e1}(\gamma )\) is given by \([\,y_{2e\mathrm{min}},\, y_{2e\mathrm{max}}\,]\), where \(y_{2e\mathrm{min}}\) and \(y_{2e\mathrm{max}}\) are the unique solutions of \(y_2{ = }(\min h(d_0)) f(y_2,\mu )\) and \(y_2 = (\max h(d_0)) f(y_2,\mu )\), respectively. We can evaluate \({\fancyscript{Y}}_{2e1}(\gamma )\) by simple calculations.

Equilibrium analysis for a monotonically decreasing function: The potential equilibrium of the system is defined by the intersection of the uncertain function \(f(y_2)\) and the straight line \(y_2\). A unique equilibrium exists for any uncertainty

Equilibrium analysis for a monotonically increasing function: The potential equilibria of the system is defined by the intersections of the uncertain function \(f(y_2)\) and the straight line \(y_2\). There can exist three equilibria for some uncertainty
Remark 1.2
Assume that \(f(y_2,\mu )\), \(y_2\ge 0\), \(\ell = m = 1\) is monotonically increasing and satisfies \(f(0) =0\) as illustrated in Fig. 1.4. Then, the equilibrium uniquely exists and \({\fancyscript{Y}}_{2e}(\gamma _0) = \{0\}\) if there is no solution of \(y_2 = (\max h(d_0)) f(y_2,\mu )\) except for \(y_2 =0\). There possibly exist multiple equilibria for such an activation function as illustrated in Fig. 1.4, which connects to the saddle-node bifurcation and its robustness analysis.
3.2 Robust Hyperbolicity Analysis
From Theorem 1.1, we can evaluate the region that contains all potential equilibrium points. Suppose that the number of the equilibria is constant for all \(\varDelta \in {\fancyscript{U}}(\gamma )\). Then, the set of potential equilibrium points associated with \({\fancyscript{Y}}_{2ei}(\gamma )\) is evaluated by (1.4) and (1.5), which are defined in the proof of Theorem 1.1 as
In this subsection, we analyze hyperbolicity of potential equilibria in \({\fancyscript{X}}_{ei}(\gamma )\), \(i = \{1,2,\ldots , N\}\).
We define robust hyperbolicity for each \({\fancyscript{X}}_{ei}(\gamma )\), \(i = \{1,2,\ldots , N\}\) of the feedback system \((\varSigma ,\varDelta )\).
Definition 1.2
( robust hyperbolicity) For a given \(\gamma > 0\), the set \({\fancyscript{X}}_{ei}(\gamma )\) is said to be \({\fancyscript{U}}(\gamma )\)-robustly hyperbolic if the following conditions hold.
-
(D1)
The set \({\fancyscript{X}}_{ei}(\gamma )\) is connected
-
(D2)
The equilibrium \([\,{x_e}^\mathsf{T}\, {\delta _e}^\mathsf{T}\,]^\mathsf{T}\) of (1.4) and (1.5) associated with \({y_{2ei}}(\varDelta )\) is hyperbolic for all \(\varDelta \in {\fancyscript{U}}(\gamma )\).
In the work by the authors [26], the robust hyperbolicity is defined and its analysis method is provided. The paper [26] assumes that the location of the unique equilibrium point \(x_e\) is not affected by the uncertainty \(\varDelta \in {\fancyscript{U}}(\gamma )\). In other words, modeling errors exist only at high-frequencies and \(\bar{\varDelta }(0) = 0\) holds. On the other hand, in this chapter, the assumption of the steady state gain \(\bar{\varDelta }(0)\) is removed. In that case, the location and even existence of equilibria are uncertain as studied above.
Remark 1.3
The condition (D2) in Definition 1.2 additionally implies that the dimension of the unstable manifolds at any equilibrium point \([\,{x_e}^\mathsf{T}\, {\delta _e}^\mathsf{T}\,]^\mathsf{T}\in {\fancyscript{X}}_{ei}(\gamma )\) of the feedback system \((\varSigma ,\varDelta )\) is constant for all \(\varDelta \in {\fancyscript{U}}(\gamma )\) including the nominal case that \(\varDelta = 0\).
We derive a robust hyperbolicity condition for the set \({\fancyscript{X}}_{ei}(\gamma )\). To this end, we linearize the feedback system \((\varSigma , \varDelta )\) at an equilibrium point \([\,{x_e}^\mathsf{T}\, {\delta _e}^\mathsf{T}\,]^\mathsf{T}\in {\fancyscript{X}}_{ei}(\gamma )\).
The Jacobian matrix of the function \({f}({y_2},{\mu })\) for a fixed \({\mu }\) is denoted by
Suppose that \(I - J_f({y_{2ei}})D_{22}({\mu })\) is nonsingular for all \({y_{2ei}} \in {\fancyscript{Y}}_{2ei}(\gamma )\), i.e., the feedback loop in \(\varSigma _L\) and \({f}\) is well-posed. Then, the feedback system \((\varSigma ,\varDelta )\) is linearized at the equilibrium point \([\,{x_e}^\mathsf{T}\, {\delta _e}^\mathsf{T}\,]^\mathsf{T}\), and is represented by the feedback system \(({\varSigma }_{y_{2ei}},\varDelta )\) composed of the linearized system
and the uncertainty \(\varDelta \in {\fancyscript{U}}(\gamma )\), where
and \(F_\mathrm{l}(X,Y)\) is the lower LFT representation as follows:
For a fixed steady state output \({y_{2ei}}\) and the linearized feedback system \(({\varSigma }_{y_{2ei}},\varDelta )\), a robust hyperbolicity condition [26] is proposed based on the Nyquist stability criterion [27]. The proof is essentially equivalent to that of the robust stability condition [23, 24] except the assumption on stability and the norm of \({\varSigma }_{y_{2ei}}\).
Theorem 1.2
[26] (linear robust hyperbolicity condition) Consider an equilibrium \({x_{ei}}\) and its corresponding steady state output \({y_{2ei}}\) in the feedback system \(({\varSigma }, \varDelta )\) for a fixed \({\mu }\). Assume that the linearized system \({\varSigma }_{y_{2ei}}\) has no neutral pole and its realization \((\hat{A}({\mu }), \hat{B}({\mu }), \hat{C}({\mu }))\) is controllable and observable. Then, for a given set \({\fancyscript{U}}(\gamma )\), the set \(\{{x_{ei}}\}\), that is, the equilibrium point \({x_{ei}}\), is \({\fancyscript{U}}(\gamma )\)-robustly hyperbolic if and only if
holds.
Proof
(Sufficiency) We denote the transfer function matrix representation of \({\varSigma }_{y_{2ei}}\) as
Since \(\Vert {\varSigma }_{y_{2ei}}\Vert _{L_\infty }\Vert \varDelta \Vert _{H_\infty } < 1\) and
hold, there exists a positive constant \(\varepsilon _1\) such that
Then, for some positive constant \(\varepsilon _2\),
holds. This implies that the linearized feedback system \(({\varSigma }_{y_{2ei}},\varDelta )\) is well-posed and has no neutral pole.
(Necessity) We suppose that (1.7) does not hold, that is, there exists \(\omega _1\) such that
holds to show that there exists \(\varDelta \in {\fancyscript{U}}(\gamma )\) such that either a feedback system is not well-posed or it has a neutral pole. First, by the singular value decomposition, \({\varSigma }_{y_{2ei}}(j\omega _1)\) can be represented by
where \(U\in \mathbb {C}^{p \times p}\), \(V\in \mathbb {C}^{q \times q}\) are unitary matrices and \(\sigma _1 = \Vert {\varSigma }_{y_{2ei}}\Vert _{L_\infty }\). Since all of the diagonal elements of \(\varSigma _g\) other than the \((1,1)\) element are not necessary in the following discussion, their descriptions are omitted. Next, we choose \(\bar{\varDelta }(s) \in RH_\infty \) such that
holds. Since \(1/\sigma _1\le \gamma \) holds, \(\bar{\varDelta }(s)\in {\fancyscript{U}}(\gamma )\). In addition, by using \(E = \text{ diag }\{\,1, 0, \) \(\dots , 0\,\}\) we have
If \(\omega _1 =\infty \), the feedback system \(({\varSigma }_{y_{2ei}},\varDelta )\) is not well-posed. Else if \(\omega _1 \in {\mathbb {R}}\), \(\text{ det }\{I_p - \bar{\varSigma }_{y_{2ei}}(j\omega ) \bar{\varDelta }(j\omega )\}\) passes the origin of the complex plane and the feedback system \(({\varSigma }_{y_{2ei}},\varDelta )\) has the neutral pole \(s = j\omega _1\). Then, the equilibrium is not \({\fancyscript{U}}(\gamma )\)-robustly hyperbolic. This completes the proof of Theorem 1.2.\(\square \)
By Theorem 1.2, we can solve the problem of robust hyperbolicity analysis for systems with dynamic uncertainties as well as the robust stability theorem [23]. The theorem is a natural extension of the robust stability theorem [23]. In the above, we use the \(L_\infty \) norm to describe the condition of the theorem. The \(L_\infty \) norm can be defined for any hyperbolic linear time-invariant system, and is equivalent to the \(H_\infty \) norm for stable systems. Then, the condition of the theorem is reduced to the well-known small-gain theorem [28].
Remark 1.4
(Computation of \(L_\infty \) norm). To determine \({\fancyscript{U}}(\gamma )\)-robust hyperbolicity of an equilibrium of an uncertain system, we need to compute the \({L_\infty }\) norm of a linear system. Some efficient \(L_\infty \) norm computational algorithms are presented: for example, the Hamiltonian matrix approach [29] and the Riccati equation and linear matrix inequality approaches [30, 31].
Remark 1.5
(Implication of \(L_\infty \) norm). By simple calculations [23], we can show that the \(L_\infty \) norm of the linearized system \({\varSigma }_{y_{2ei}}\) is equivalent to the conditional \(L_2\) gain [32, 33]
where \(\Vert \cdot \Vert _{L_2}\) is the \(L_2\) norm of a signal and \(\tilde{\varSigma }_{y_{2ei}}\) is the operator representation of \({\varSigma }_{y_{2ei}}\). The conditional \(L_2\) gain Conditional L2 gain@Conditional \(L_2\) gain can be defined even for unstable and nonlinear systems. This fact implies that it is possible to extend Theorem 1.2 as a condition of linear systems for keeping the instability independently of uncertainties to that of nonlinear systems.
From Theorems 1.1 and 1.2, we derive the robust hyperbolicity condition for the nonlinear feedback system \((\varSigma , \varDelta )\) with uncertainty-dependent equilibria.
Theorem 1.3
For a given set \({\fancyscript{U}}(\gamma )\), the set \({\fancyscript{X}}_{ei}(\gamma )\) is \({\fancyscript{U}}(\gamma )\)-robustly hyperbolic if the set \({\fancyscript{X}}_{2ei}(\gamma )\) is connected and the following conditions are satisfied for all \({y_{2ei}} \in {\fancyscript{X}}_{2ei}(\gamma )\).
-
(C1)
The linearized system \({\varSigma }_{y_{2ei}}\) has no neutral pole.
-
(C2)
Realization \((\hat{A}({\mu }), \hat{B}({\mu }), \hat{C}({\mu }))\) is controllable and observable.
-
(C3)
Inequality (1.7) holds.
We can numerically check (C1)–(C3) by partitioning \({\fancyscript{X}}_{ei}(\gamma )\). To check (C3), we transform the linearized system \(({\varSigma }_{y_{2ei}}, \varDelta )\) into another feedback form composed of the linear system \(\varSigma _L\) and the uncertainty \(\mathrm{diag}\{J_f({y_{2ei}}), \varDelta \}\). The uncertainty part has block-diagonal structure and is included in the set \(\mathrm{diag}\{J_f({\fancyscript{X}}_{ei}(\gamma )), {\fancyscript{U}}(\gamma )\}\). Then, we evaluate the hyperbolicity of the linear feedback system \((\varSigma _L, \mathrm{diag}\{J_f({y_{2ei}}), \varDelta \})\) by computing the structured singular value [34] of \(\varSigma _L\) instead of the \(L_\infty \) norm. Obviously, when the norm of \(J_f({y_{2ei}})\) is sufficiently small, the theorem is corresponding to the robust stability theorem [23] and the robust instability theorem [26, 35–37] for uncertain linear systems.
3.3 Robust Bifurcation Analysis
We propose a method for robust bifurcation analysis that is derived by utilizing Theorem 1.1 for equilibrium analysis and Theorem 1.3 for hyperbolicity analysis. In the method, \(\tilde{{\fancyscript{P}}}_\mathrm{PB}(\gamma )\) is defined as a region that includes the potential bifurcation region \({{\fancyscript{P}}}_\mathrm{PB}(\gamma )\), i.e., \({{\fancyscript{P}}}_\mathrm{PB}(\gamma )\subseteq \tilde{{\fancyscript{P}}}_\mathrm{PB}(\gamma )\).
Procedure for robust bifurcation analysis: Repeat the following Steps (i) and
(ii) for all parameter values \({\mu } \in {\fancyscript{P}}\).
-
(i)
Solve the static equation (1.3) for all \(D_0 = \bar{\varDelta }(0)\in {\fancyscript{U}}_0(\gamma )\). If the number of the real solutions \({y_{2ei}}(\varDelta )\) is constant for all \(\varDelta \in {\fancyscript{U}}(\gamma )\) and each set \({\fancyscript{X}}_{ei}(\gamma )\), \(i = \{1,2,\ldots , N\}\) is connected, then, go to Step (ii). Otherwise \({\mu } \in {\fancyscript{P}}_\mathrm{PB}(\gamma )\).
-
(ii)
Define the linearized system \({\varSigma }_{y_{2ei}}\) and evaluate the \(L_\infty \) norm for all \({y_{2ei}} \in {\fancyscript{Y}}_{2ei}(\gamma )\), \(i= \{1,2,\ldots , N\}\). If all values of the \(L_\infty \) norm are strictly less than \(1/\gamma \), then, \({\mu } \in {\fancyscript{P}}\backslash \tilde{{\fancyscript{P}}}_\mathrm{PB}(\gamma )\). Otherwise \({\mu } \in \tilde{{\fancyscript{P}}}_\mathrm{PB}(\gamma )\).
By this procedure, we can evaluate the potential bifurcation region \({{\fancyscript{P}}}_\mathrm{PB}(\gamma )\) more widely than the exact region. In general, to identify the type of bifurcation (saddle-node-type, Hopf-type, and so on) that occurs in \({{\fancyscript{P}}}_\mathrm{PB}(\gamma )\), we need additional assumptions. For example, under the assumption that \(\bar{\varDelta }(0)= 0\), we can show that at a saddle-node bifurcation point \(\mu _\mathrm{SN}\) for a nominal feedback system \((\varSigma , 0)\) is robustly a saddle-node bifurcation point for all uncertain feedback system \((\varSigma , \varDelta )\). We can prove this fact by showing that any uncertain feedback system \((\varSigma , \varDelta )\) satisfies saddle-node bifurcation theorem (see e.g., Theorem 2.2 in [1]) as long as \(\bar{\varDelta }(0) = 0\).
4 Examples of Robust Bifurcation Analysis
We illustrate a procedure of dynamic robust bifurcation analysis in the following examples for normal forms of various types of bifurcation.
4.1 Robustness Analysis of Saddle-Node Bifurcation
Let us consider the following normal form for saddle-node bifurcation with a dynamic uncertainty:
This uncertain model is written by the feedback form illustrated in Fig. 1.1 To evaluate the potential bifurcation region, (1) first we study the existence and location of equilibria and (2) then testify the robust hyperbolicity of potential equilibria.
(1) Note that the equilibria are affected by the steady state gain \(D_0 = \varDelta (0)\in {\fancyscript{U}}_0(\gamma )\) and are determined by the intersection of \(\varDelta _0 x\) and \(f(x) = x^2 + \mu \). The equilibria exist at
for \(\mu \le D_0^2/4\), whereas no point exists for \(\mu > D_0^2/4\). For any uncertainty \(\varDelta \in {\fancyscript{U}}(\gamma )\), two equilibrium points encounter each other and vanish at \(\mu \in [\,0, \gamma ^2/4\,]\) along the parameter changing as illustrated in Fig. 1.5. This implies that the saddle-node bifurcation occurs, i.e., the number of the equilibria is varied by parameter variation, on \([\,0, \gamma ^2/4\,]\) as long as \(\varDelta \in {\fancyscript{U}}(\gamma )\).
(2) We further study the robust hyperbolicity of the equilibria for bifurcation analysis. Even if the equilibria exist, bifurcation can occur by hyperbolicity being impaired. Linearize the nonlinear feedback system at the points \(x = x_e\) to obtain
where \(\tilde{x} := x - x_e\). From Theorem 1.3 for a fixed \(\mu \), the equilibria \(x_{e1}\) and \(x_{e1}\) are hyperbolic for all \(\varDelta \in {\fancyscript{U}}(\gamma )\) if the \(L_\infty \) norms of the linearized systems are strictly less than \(1/\gamma \) for all \(D_0 \in {\fancyscript{U}}_0(\gamma )\). Therefore, we can show that the equilibria are hyperbolic for all \(\mu < -3\gamma ^2/4\) and there is no bifurcation point in the parameter region, although bifurcation occurs at \(\mu \in [\,-3\gamma ^2/4, \gamma ^2/4\,]\) as illustrated in Fig. 1.5.

Robust bifurcation analysis for saddle-node bifurcation (\(\gamma = 0.5, \mu \in {\fancyscript{P}}:=[-1,1]\)): The location and existence of the equilibria are affected by the uncertainties. The hyperbolicity of equilibria can be impaired for some uncertainty in the parameter region \([\,-3\gamma ^2/4,\, 0\,]\) and they can disappear and saddle-node bifurcation occurs in \([\, 0,\, \gamma ^2/4\,]\)
4.2 Robustness Analysis of Hopf Bifurcation
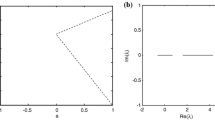
Consider the normal form for Hopf bifurcation with a dynamic uncertainty. The uncertain system is represented by the feedback form that is illustrated in Fig. 1.1, where \(\varSigma _L\), \(f\), and \(\varDelta \) are given by
When \(u_1 = 0\), the differential equation composed of \(\varSigma _L\) and \({f}\) has the unique equilibrium at the origin for any parameter \(\mu \in {\mathbb {R}}\). The existence and location of the equilibrium are independent of the feedback-type uncertainty. We perform dynamic robust bifurcation analysis of the origin. To this end, we have the linearized system \({\varSigma }_{y_{2ei}}\) that is the same as \(\varSigma _L\) to compute the \(L_\infty \) norm
Then, we evaluate the potential bifurcation region for the origin by
5 Conclusion
In this chapter, we integrated a concept of bifurcation in dynamical systems theory and that of robustness analysis in control systems theory to propose dynamic robust bifurcation analysis. In the analysis, given an uncertain system described by a model set, we obtain an outer approximation of all the possible bifurcation points.
References
Robinson, C.: Dynamical Systems: Stability, Symbolic Dynamics, and Chaos. CRC Press, Boca Raton (1998)
Wiggins, S.: Introduction to Applied Nonlinear Dynamical Systems and Chaos, 2nd edn. Springer, New York (2003)
Kuznetsov, Y.: Elements of Applied Bifurcation Theory, 3rd edn. Springer, New York (2004)
Elowitz, M.B., Leibler, S.: A synthetic oscillatory network of transcriptional regulators. Nature 403, 335–338 (2000)
Gardner, T.S., Cantor, C.R., Collins, J.J.: Construction of a genetic toggle switch in Escherichia coli. Nature 403, 339–342 (2000)
Tyson, J.J., Chen, K., Novak, B.: Network dynamics and cell physiology. Nat. Rev. Mol. Cell Biol. 2(12), 908–916 (2001)
Tyson, J.J., Chen, K., Novak, B.: Sniffers, buzzers, toggles and blinkers: dynamics of regulatory and signaling pathways in the cell. Curr. Opin. Cell Biol. 15(2), 221–231 (2003)
Swat, M., Kel, A., Herzel, H.: Bifurcation analysis of the regulatory modules of the mammalian G1/S transition. Bioinformatics 20(10), 1506–1511 (2004)
Angeli, D., Ferrell Jr, J.E., Sontag, E.D.: Detection of multistability, bifurcations, and hysteresis in a large class of biological positive-feedback systems. Proc. Natl. Acad. Sci. USA 101(7), 1822–1827 (2004)
Fung, E., Wong, W.W., Suen, J.K., Bulter, T., Lee, S., Liao, J.C.: A synthetic gene-metabolic oscillator. Nature 435, 118–122 (2005)
Wong, W.W., Tsai, T.Y., Liao, J.C.: Single-cell zeroth-order protein degradation enhances the robustness of synthetic oscillator. Mol. Syst. Biol. 3, 130 (2007)
Chen, L., Wang, R., Li, C., Aihara, K.: Modeling Biomolecular Networks in Cells: Structures and Dynamics. Springer, New York (2010)
Cosentino, C., Bates, D.: Feedback Control in Systems Biology. Chapman & Hall, CRC, Boca Raton (2011)
Padirac, A., Fujii, T., Rondelez, Y.: Bottom-up construction of in vitro switchable memories. Proc. Natl. Acad. Sci. USA 109(47), 19047–19048 (2012)
Dobson, I.: Observations on the geometry of saddle node bifurcation and voltage collapse in electrical power systems. IEEE Trans. Circuits Syst. I: Fundam. Theory Appl. 39(3), 240–243 (1992)
Dobson, I., Liming, L.: Computing an optimum direction in control space to avoid saddle node bifurcation and voltage collapse in electric power systems. IEEE Trans. Autom. Control 37(10), 1616–1620 (1992)
Ajjarapu, V., Lee, B.: Bifurcation theory and its application to nonlinear dynamical phenomena in an electrical power system. IEEE Trans. Power Syst. 7(1), 424–431 (1992)
Varghese, M., Wu, F., Varaiya, P.: Bifurcations associated with sub-synchronous resonance. IEEE Trans. Power Syst. 13(1), 139–144 (1998)
van den Driessche, P., Watmough, J.: A simple SIS epidemic model with a backward bifurcation. J. Math. Biol. 40(6), 525–540 (2000)
Dodds, P.S., Watts, D.J.: Universal behavior in a generalized model of contagion. Phys. Rev. Lett. 92(21), 218701 (2004)
Gross, T.: DfLima, C.J.D., Blasius, B.: Epidemic dynamics on an adaptive network. Phys. Rev. Lett. 96(20), 208701 (2006)
Wang, W.: Backward bifurcation of an epidemic model with treatment. Math. BioSci. 201(1–2), 58–71 (2006)
Zhou, K., Doyle, J.C., Glover, K.: Robust and Optimal Control. Prentice Hall, Upper Saddle River (1996)
Skogestad, S., Postlethwaite, I.: Multivariable Feedback Control: Analysis and Design, 2nd edn. Wiley-Interscience, New York (2005)
Ikeda, K., Murota, Z.: Imperfect Bifurcation in Structures and Materials: Engineering Use of Group-Theoretic Bifurcation Theory, 2nd edn. Springer, New York (2010)
Inoue, M., Imura, J., Kashima, K., Aihara, K.: Robust bifurcation analysis based on the Nyquist stability criterion. In: Proceedings of 52nd IEEE Conference on Decision and Control, pp. 1768–1773 (2013)
Nyquist, H.: Regeneration theory. Bell Syst. Tech. J. 11(1), 126–147 (1932)
Zames, G.: On the input-output stability of nonlinear time-varying feedback systems, Parts I and II. IEEE Trans. Autom. Control 11, 228–238 and 465–476 (1966)
Bruinsma, N.A., Steinbuch, M.: A fast algorithm to compute the \(H_\infty \)-norm of a transfer function matrix. Syst. Control Lett. 14(4), 287–293 (1990)
Willems, J.C.: Least squares stationary optimal control and the algebraic Riccati equation. IEEE Trans. Autom. Control 16(6), 621–634 (1971)
Stoorvogel, A.A.: Stabilizing solutions of the \(H_\infty \) algebraic Riccati equation. Linear Algebra Appl. 240, 153–172 (1996)
Takeda, S., Bergen, A.R.: Instability of feedback systems by orthogonal decomposition of \(L_2\). IEEE Trans. Autom. Control 18(6), 631–636 (1973)
Desoer, C.A., Vidyasagar, M.: Feedback Systems: Input-Output Properties, SIAM (1975)
Doyle, J.: Analysis of feedback systems with structured uncertainties. IEE Proc. D (Control Theory Appl.) 129(6), 242–250 (1982)
Inoue, M., Imura, J., Kashima, K., Arai, T., Aihara, K.: An instability condition for uncertain systems toward robust bifurcation analysis. In: Proceedings of European Control Conference 2013, pp. 3264–3269 (2013)
Inoue, M., Imura, J., Kashima, K., Aihara, K.: Robust bifurcation analysis of systems with dynamic uncertainties. Int. J. Bifurcat. Chaos 23(9), 1350157 (2013)
Inoue, M., Arai, T., Imura, J., Kashima, K., Aihara, K.: Robust stability and instability of nonlinear feedback system with uncertainty-dependent equilibrium. In: Proceedings of European Control Conference 2014, pp. 1486–1491 (2014)
Acknowledgments
The authors gratefully acknowledge Takayuki Arai, Masayasu Suzuki, and Takayuki Ishizaki for their comments and fruitful discussion on this research.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer Japan
About this chapter
Cite this chapter
Inoue, M., Imura, Ji., Kashima, K., Aihara, K. (2015). Dynamic Robust Bifurcation Analysis. In: Aihara, K., Imura, Ji., Ueta, T. (eds) Analysis and Control of Complex Dynamical Systems. Mathematics for Industry, vol 7. Springer, Tokyo. https://doi.org/10.1007/978-4-431-55013-6_1
Download citation
DOI: https://doi.org/10.1007/978-4-431-55013-6_1
Published:
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-55012-9
Online ISBN: 978-4-431-55013-6
eBook Packages: EngineeringEngineering (R0)