
Abstract
This paper is concerned with the stabilization problem for a class of uncertain nonlinear fractional order systems described by an interval type-2 fuzzy model, under actuator faults. To solve the problem, a robust fault-tolerant control (FTC) scheme composed mainly of an augmented non-fragile observer and a new-type \(H_\infty\) controller is developed. The resulting control system is with the following advantages. On the one hand, the system stability domain is extended significantly, attributed to introducing the concept of D-stability to the control design and stability analysis, instead of the conventional indirect Lyapunov theory. Theoretically, the stability domain can be expanded from the original half-plane to nearly the overall plane. On the other hand, the control system is robust against the measurement noise and external disturbances which however are not taken into account in the related works. This is achieved by adopting the \(H_\infty\) control method in a novel way, in which a new technical lemma is presented to solve real linear matrix inequalities (LMIs). In this way, the robust FTC design is also simplified, wherein the number of the required decision variables is reduced from four to two. Besides, the control design is less restrictive: three common requirements for the system matrix or the control gain selection are eliminated. Finally, the simulation results on an electrical circuit system and a numeral example both illustrate the above theoretical findings.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Fractional order systems (FOSs) are general with respect to integer order systems (IOSs) which are a special case of FOSs [1,2,3]. On the other hand, many physical systems or processes can be described better by fractional derivatives and integrals such as the viscoelasticity of polymer materials [4], the fractional order electrical circuit systems [5], and signal processing [6]. Therefore, in the past several decades, FOSs have attracted great attention from the control field. The stability analysis of FOSs was first investigated [7,8,9,10,11,12]. A stability criterion for the FOSs was provided [7] by examining the locations of the system matrix eigenvalues. Some stability conditions were further given [8] by solving the LMIs with complex variables, and the approaches to transforming the complex variables to the real variables were developed [9, 10] for ease of solution. To this end, some brief theorems without LMIs were further established [11, 12] that simplify the stability analysis significantly. On the other hand, the observer and controller designs were carried out [13,14,15,16,17,18,19,20]. A non-fragile observer was constructed [13]; some output-feedback controllers based on the iterative algorithms were designed [14, 15]. To simplify the design and computational complexity, the LMI tool [16]- [20] or the singular value decomposition technique [16] was skillfully adopted. For nonlinear FOSs, the Takagi-Sugeno (T-S) fuzzy model was employed in the control design [17,18,19]. And in the presence of model uncertainties, the sliding mode control method was applied to the T-S fuzzy singular FOSs [20]. To further enhance the robustness of the control systems, the \(H_\infty\) control method was applied to the FOSs successfully [21,22,23].
It should be noted that the above-mentioned results are established in the fault-free case. With the fast development of modern industry and information technology, many control systems are increasingly complex. As a result, the system is more likely to meet faults. Faults lead to unfavorable effects on the performance and/or stability of the control system, and even cause disastrous consequences. Therefore, the control system with tolerance to unexpected faults, especially to the actuator faults that change the control action straightforward, is of great significance. For this purpose, a variety of fault-tolerant control (FTC) approaches were proposed in the literature. In general, an observer is designed to estimate the faults for compensation. For example, under the assumption of known fault bounds, a sliding mode observer was constructed [24]. To avoid the difficulty in solving the bilinear matrix inequalities, the fault observer and the controller were designed separately [25, 26]. However, the comparative result between the integrated and separate designs [27] reveals that the former achieves better estimation and control performance. On the other hand, when the full system state is available, some FTC schemes were developed [28, 29] with respect to the energy-bounded faults. Further, an output-feedback FTC strategy was proposed [30]. To the FTC problem for FOSs, some solutions were also reported in recent years [31,32,33,34]. The model uncertainty was taken into consideration [31, 32], yielding some robust FTC laws. Under the assumption that the actuator faults are n-order differentiable, an augmented fault observer was developed [33]. The \(H_\infty\) control method and the dynamic output-feedback control design method were combined to deal with the actuator faults [34].
Motivated by the above observation, this paper presents a novel output-feedback FTC strategy for a class of FOSs with actuator faults. Its advantages are as follows.
-
(1)
The stability domain of the faulty FOS is extended by our approach. In the existing literature on FTC of FOSs [32], the control design and analysis are based mainly on the indirect Lyapunov theory, that is, the designers follow the FTC method for IOSs. This yields the system stability domain covering only the left half of the plane. Instead of the indirect Lyapunov theory, the D-stability-based analysis approach in which the nonconvex property of the FOS is taken into account fully [8, 10], is adopted in this paper. In this way, the system stability domain is extended significantly.
-
(2)
The proposed approach of fault estimation and FTC is robust against the measurement noise and external disturbances which however are not considered in the existing FTC designs for FOSs [31, 32]. The robustness is achieved by adopting the \(H_\infty\) control method. Moreover, we evade the calculation of complex matrix inequalities [21]- [23], and the controller parameters are determined by solving real LMIs. This reduces the design complexity of the fault observer and the controller.
-
(3)
In addition, the proposed output-feedback control design for FOSs is less restrictive than the existing ones. The output matrix is required to be of full row rank or same [13, 16] and [28]; certain matrices in the intermediate steps of the control design need to be in the block diagonal form [13]. However, this paper is without the above requirements.
Notations: In this paper, \(\mathbb{R},\) \(\mathbb{R}^n,\) \(\mathbb{R}^{n\times m}\) and \(\mathbb{C}^{n\times m}\) denote the real number field, n-dimensional Euclidean space, the set of all \(n\times m\) real matrices, and the set of all \(n\times m\) complex matrices, respectively. Re(P) and Im(P) mean the real and image parts of complex matrix P, respectively. j is an imaginary unit. \(X>0~(<0)\) demonstrates that X is a positive (negative) definite matrix. \(X^T\) and \(X^{-1}\) stand for the transpose and the inverse of X, respectively. The symbols \(\mathrm{sym}\{Y\}\) and \(\star\) represent \(Y+Y^T\) and the transpose in the symmetric positions of a matrix, respectively. \(I_n\) stands for an identity matrix with n dimensions. For brevity, denote \(a=\mathrm{sin}(\frac{\alpha \pi }{2})\) and \(b=\mathrm{cos}(\frac{\alpha \pi }{2})\) in the sequel. A matrix is assumed to have appropriate dimensions to be compatible for algebraic calculus without specially statement.
2 System Description and Preliminaries
2.1 System Description
Different from the classical T-S fuzzy model [17,18,19,20, 35, 36], the type-2 fuzzy model is an effective way to describe the system with model uncertainties [37,38,39,40]. In an integer order type-2 fuzzy model, its ith fuzzy rule is:
Plant rule i: IF \(h_{1}(x(t))\) is \(H_{i1}~ \mathrm{and}~\cdots ~ \mathrm{and}~ h_{p}(x(t))\) is \(H_{ip}\), THEN
for \(i=1,2,\ldots ,r\) with r the number of the IF-THEN rules, where \(H_{ig}\) and \(h_{g}(x(t))\) stand for the fuzzy set and the premise variable, respectively, \(g=1,~2, \ldots , p;\) \(x(t)\in \mathbb{R}^{n}\), \(u(t)\in \mathbb{R}^{m},\) \(\omega _1(t)\in \mathbb{R}^{n}\) and \(\omega _2(t)\in \mathbb{R}^{s}\) are the state, control input, external disturbance and measurement uncertainty, respectively; \(y(t)\in \mathbb{R}^{s}\) is the measured output; \(A_i,~ B_i,~\tilde{G}_{ i},~ C_i\) and \(\tilde{D}_i\) are the system matrices. Accordingly, the overall fuzzy system is
where \(\theta _i(x (t))\) are the grades of membership:
where \(\underline{\lambda }_i(x(t))\) and \(\overline{\lambda }_i(x(t))\) are adjustable nonlinear functions according to the change of uncertain parameters, which meet
And \(\underline{\theta }_i (x (t))\) and \(\overline{\theta }_i (x (t))\) are the lower and upper bounds of the membership functions of the ith rule, respectively, with
where \(\underline{\mu }_{H_{ig}}(h_g(x(t)))\) and \(\overline{\mu }_{H_{ig}}(h_g(x(t)))\) denote the lower and upper membership of \(h_g(x(t))\) in \(H_{ig}\), respectively, meeting
For simplification of notation, let \(\theta _i=\theta _i(x(t))\) and \(\eta _i=\eta _i(x(t))\). Define
Then, (2) becomes
Now we consider a fractional order type-2 fuzzy model. Usually, the Caputo definition is adopted to describe the FOSs.
Definition 1
The \(\alpha\) order Caputo derivative of the function g(t) is defined as [2]
with \(m-1<\alpha <m\) for an integer m, and
Following (1), the type-2 fuzzy fractional order model is written as:
Plant rule i: IF \(h_{1}(x(t))\) is \(H_{i1}~ \mathrm{and}~\cdots ~ \mathrm{and}~ h_{p}(x(t))\) is \(H_{ip}\), THEN
As usual, we discuss the fixed order \(\alpha\) with \(0<\alpha <1\) [9,10,11,12,13,14]. The overall fuzzy FOS is
The possible actuator faults are taken into account: \(u_f(t)=u(t)+f(t)\). The faulty system is thus:
Assumption 1
\(\dot{f}(t)\) belongs to \(L_2 [0,~ \infty )\) [30].
Remark 1
Besides Assumption 1, it is usually assumed in the related works on fault estimation that \(f(t) \in L_2 [0, \infty )\) [41] or that the fault bound is known [24]. In this paper, these requirements are not involved.
For ease of exposition, rewrite (7) in the following form:
where \(\omega (t)=\left[ \begin{array}{c} \omega _1(t)\\ \omega _2(t)\\ \end{array} \right] ,~G_{ i}=\tilde{G}_{ i}\left[ \begin{array}{cc} I&{}0\\ \end{array} \right]\) and \(\tilde{D}_{ i}\left[ \begin{array}{cc} 0&{}I\\ \end{array} \right] .\)
The control objective for the system in (8) is stabilization, even in the presence of actuator faults.
2.2 Preliminaries
Consider the following FOS with \(0<\alpha <1,\)
In the classical \(H_\infty\) control designs for (9) [21, 22], the following lemma is usually applied to solving the linear complex matrix inequalities.
Lemma 1
The FOS in (9) meets \(\Vert y(t)\Vert _2<\gamma \Vert \omega (t)\Vert _2\) if there exists a complex matrix P such that
Lemma 1 yields complex solutions. In general, it is nontrivial to solve complex matrix inequalities; for example, the complex matrix inequality is unsolvable by the widely used mathematical tool MATLAB. This is because the complex matrix should be mapped to a real matrix for calculation. Motivated by this, a new lemma is established in this paper, presented as follows.
Lemma 2
The FOS in (9) meets \(\Vert y(t)\Vert _2<\gamma \Vert \omega (t)\Vert _2\) if there exist a symmetric matrix X and a skew-symmetric matrix Y such that
Proof
Note that \(\Vert G_{wz}(s)\Vert =\Vert C(s^\alpha I-A)^{-1}G+D\Vert <\gamma\) is equivalent to \(\Vert G^T_{wz}(s)\Vert =\Vert G^T(s^\alpha I-A^T)^{-1}C^T+D^T\Vert <\gamma .\) This yields (13), straightforward. Next, we show that \(P=X+Yj>0\) if
Under (14), there is \(\mathrm{Im}(P)^T=-\mathrm{Im}(P).\) For any \(x,~y\in \mathbb{R}^n,\) there thus hold \(x^T\mathrm{Im}(P)x= 0\) and \(y^T\mathrm{Im}(P)y= 0.\) Calculating the real part of
one has
From (14), we have \(\mathrm{Re}(\varSigma )>0.\) Calculating the imaginary part of \(\varSigma\), we have
Due to \(\varSigma =\mathrm{Re} (\varSigma )+\mathrm{Im}(\varSigma )j=\mathrm{Re}(\varSigma )>0,\) \(P>0\) holds. This completes the proof. \(\square\)
As seen, Lemma 2 gives a straightforward way to solve real matrix inequalities, yielding real solutions. Therefore, it significantly reduces the computation complexity, simplifying the \(H_\infty\) control design for FOSs.
In addition, two lemmas [42] are given as follows.
Lemma 3
For any constant matrices \(S_1\), \(S_2\) and \(S_3\) with \(S_1^T=S_1\) and \(S_3^T=S_3>0\), there is \(S_1+S_2S_3^{-1}S_2^T<0\) if and only if
Lemma 4
For any T, H, E and \(F^T(\sigma )F(\sigma )\le I\), there holds
if and only if there exists an \(\varepsilon >0\) such that
where \(\sigma \in \varTheta \subset \mathbb{R}.\)
3 Control Design
To achieve the control objective, an output-feedback FTC scheme based on a non-fragile observer is developed in this section.
3.1 Observer Design
To detect and estimate the actuator faults, the following non-fragile fault observer is constructed.
Observer rule i: IF \(h_{1}(x(t))\) is \(H_{i1}~ \mathrm{and}~\cdots ~ \mathrm{and}~ h_{p}(x(t))\) is \(H_{ip}\), THEN
where \(\hat{x}(t),~\hat{y}(t)\) and \(\hat{f}(t)\) are the estimates of x(t), y(t) and f(t), respectively; \(L_i,~F_i,~ \varDelta L_i\) and \(\varDelta F_i\) constitute the observer gains, with
where \(L_i, F_i, U_{Li}, V_{Li}, U_{Fi}\) and \(V_{Fi}\) are fixed, and \(F(\sigma )\) is variable but should meet
Then the overall fault observer is
where
Remark 2
The non-fragile observer is used to estimate the state and the actuator faults simultaneously. The observer gains are comprised of the fixed and variable gains such that the non-fragile observer is still effective when tiny bias or disturbances occur in the observer gains.
Next, we determine the observer parameters \(L_i\) and \(F_i\) in (15). It begins with analyzing the error systems. Let \(e_x(t)=x(t)-\hat{x}(t),\) \(e_f(t)=f(t)-\hat{f}(t),\) \(e_y(t)=y(t)-\hat{y}(t).\) From (8) and (18), the error systems are described by
By Definition 1, Assumption 1 implies that \(\mathscr {D}^\alpha {f}(t)\) belongs to \(L_2 [0,~ \infty ).\) Let
The overall error system is
Choose a symmetric matrix \(X_o,\) a skew-symmetric matrix \(Y_o,\) and a bank of matrices with the appropriate dimensions, \(W_k, k=1,2,\cdots ,r,\) together with a set of positive scalars \(\varepsilon _{ik},\) \(i,~k=1,~2,~\cdots ,~r,\) such that
where
Accordingly, the observer gain is set to be
3.2 Controller Design
With the fault estimates, we design a dynamic output feedback fault-tolerant controller to stabilize the system in (8).
Controller rule k: IF \(f_{1}(x(t))\) is \(F_{k1}~ \mathrm{and}~\cdots ~ \mathrm{and}~ f_{p}(x(t))\) is \(F_{kp}\), THEN
where \(F_{kg}\) stands for the kth fuzzy set of the function \(f_g (x (t)), k= 1, 2,\cdots ,r, g =1, 2,\cdots ,p,\) and p is the number of the premise variables. \(A_{ck} , B_{ck},\) and \(C_{ck}\) are the controller gains to be determined. Let
and
The overall output feedback controller is
where
and \(\underline{m}_k(x(t))\) and \(\overline{m}_k(x(t))\) are the predefined functions that meet
In (27), \(\underline{\eta }_k (x (t))\) and \(\overline{\eta }_k (x (t))\) are the lower and upper bounds of the membership functions of the kth rule, respectively, with
where \(\underline{\mu }_{F_{kg}}(f_g(x(t)))\) and \(\overline{\mu }_{F_{kg}}(f_g(x(t)))\) denote the lower and upper memberships of \(f_g(x(t))\) in \(F_{kg}\), respectively, meeting
Substituting (26) into (8) gives the dynamic equation of the closed-loop system:
where
A principle for the selection of the controller gains is given as follows. Choose two symmetric matrices \(X_{c1}\) and \(X_{c2},\) a skew-symmetric matrix \(Y_{c1},\) and two banks of matrices with appropriate dimensions, \(\varPhi _i\) and \(\varPsi _i,~i=1,~2,~\cdots ,~r\) such that
where

Accordingly, the controller gain matrices are set to be
4 Performance Analysis
We first show the effectiveness of the designed observer by the following theorem.
Theorem 1
Under Assumption 1, applying the observer in (18) with (24) to the system in (20) ensures \(\Vert e_f(t)\Vert _2<\gamma _o\Vert \xi (t)\Vert _2.\)
Proof
Substituting (24) into (20) gives
where \(W^T(\theta )=\sum _{i=1}^r \theta _i W^T_i.\) Note that
with \(\hat{I}=\left[ \begin{array}{cccc} 0&{}I_s\\ \end{array} \right] .\) Applying Lemma 3, it is obtained that (22) is equivalent to
From (17), we have
By Lemma 4, combining (36) and (37) yields
Noting that
(38) is rewritten as
From (39), it follows that
Similarly, from (23), we have
where
According to
it is straightforward to see by the combination of (40) and (41) that
where
Following Lemma 1, we have \(\Vert e_f(t)\Vert _2<\gamma _o\Vert \xi (t)\Vert _2.\) This ends the proof. \(\square\)
It is noted that the minimum \(H_\infty\) attenuation level of Theorem 1 can be obtained by solving the programming problem: minimize \(\gamma _o\) subject to (21)–(23).
Next, we show the effectiveness of the designed controller by the following theorem.
Theorem 2
Apply the controller in (26) with (33) to the system in (8). Under Assumption 1 and \(\eta _k-\varrho _k\theta _k\ge 0,0<\varrho _k<1,~i,~k=1,2,\cdots ,r\), the resulting control system in (28) is robustly stable and meets \(\Vert y(t)\Vert _2<\gamma _c\Vert \nu (t)\Vert _2.\)
Proof
Eq. (29) shows
and
Let
and then construct the following matrix in the form of (12):

Let \(Z=\left[ \begin{array}{cccc} I &{} 0&{}0 &{} 0\\ 0&{} 0&{}I&{} 0\\ 0&{} I&{}0 &{} 0\\ 0 &{} 0&{} 0&{} I\\ \end{array} \right] .\) Then, there is
From (44), we have
which meets the condition of Lemma 3. Therefore, by Lemma 3, we further have
which in turn means that
Combining (46) and (47) yields
Let

Due to \(\sum \limits _{i=1}^r\sum \limits _{k=1}^r\theta _i(\theta _k-\eta _k)\varDelta _i=0,\) where \(\varDelta _i=\varDelta ^T_i\) is introduced only for analysis, (54) becomes
Under \(\eta _k-\varrho _k\theta _k\ge 0\), from (30), we further have
Note that \(\sum \limits _{i=1}^r\sum \limits _{k=1}^r\theta _i\theta _k=\sum \limits _{i=1}^r\theta _i=1,\) and recall (30)–(32). Then, (56) further meets
By Lemma 3, (57) is equivalent to
Then, after algebraic manipulations, we get
where
and
Accordingly, there hold
and
Now, we combine (58)–(61), and obtain
which means
According to Lemma 3, (63) is equivalent to
This means that the closed-loop system in (28) is robustly stable and meets the \(H_\infty\) performance index \(\Vert y(t)\Vert _2<\gamma \Vert \nu (t)\Vert _2.\) This completes the proof. \(\square\)
It is also noted that the minimum \(H_\infty\) attenuation level of Theorem 2 can be obtained by solving the programming problem: minimize \(\gamma _c\) subject to (29)–(32).
5 Simulation Examples
In this section, two simulation examples are given to illustrate the effectiveness of the control strategy proposed in this paper and the performance of the resulting control system.
5.1 Electrical Circuit System
Consider an electrical circuit system shown in Fig. 1 with the inductor L, the capacitance C, the resistance R, and the source voltage \(u_s\). Let \(i_L\) and \(i_C\) denote the currents passing through the inductor L, and the capacitance C, respectively; let \(u_L\) and \(u_C\) denote the voltage on the inductor L and on the capacitance C, respectively. As described [3],
Further, according to the Kirchhoffs law, we have
Therefore, the electrical circuit system is described by
Let \(u_f(t)=u(t)+f(t),\) where
simulates the actuator fault. Moreover, to test the robustness of our observer, referring to Ref. [3], consider the measurement output as
with
and take the external disturbance into account:
In the simulation, let \(\alpha =0.9,L=2,C=1,R=4+2\mathrm{sin}(t)\) and \(u_s=1.\) The matrices in the fuzzy system in (8) are selected as
The corresponding membership functions are chosen as \(\theta _1=(1-0.5\mathrm{sin}(t))/2\) and \(\theta _2=1-\theta _1.\) Note that the above system is input-to-state stable. Thus, it is mainly used to verify the effectiveness of our fault observer. Following Theorem 1, we design an non-fragile observer for the above system. The variable gains in the observer in (18) are determined by
Set the \(H_\infty\) performance index to be \(\gamma _o=0.5.\) Then, the constant observer gains are obtained by solving the LMIs in (21)–(23):
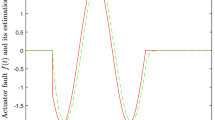
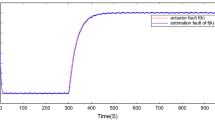
Applying the designed fault observer to the electrical circuit system, the simulation results are exhibited in Figs. 2, 3 and 4. It is observed that the fault estimation is achieved by our observer, despite the presence of measurement uncertainties and external disturbances. This thus illustrates the effectiveness of the proposed approach for the observer design.

Electrical circuit system

The actuator fault and its estimate

The system state and its estimate

The estimation errors
5.2 Numerical Example
Now, we adopt a general example to show the effectiveness of our control approach. Consider an FOS with \(\alpha =0.8\) and with three state variables and one input,
where \(z(t)=\mathrm{sin}(x_1(t))+M,\) and \(M\in [-1,0]\) is a uncertain parameter. It is described by (8) with the following rules.
Plant rule 1: IF \(x_1(t)\) is \(\theta _{1}(x_1(t)),\) THEN
Plant rule 2: IF \(x_1(t)\) is \(\theta _{2}(x_1(t)),\) THEN
To test the fault tolerance and robustness of our approach, the following actuator fault is taken into account in the simulation:
The external disturbance and measurement uncertainty are the same as those in last simulation example.
Following Theorems 1 and 2, we design an FTC scheme for the above system. We first construct a non-fragile observer for fault estimation. The variable gains in the observer in (18) are determined by
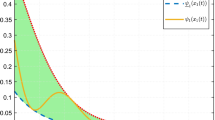
The lower and upper membership functions of the type-2 fuzzy model are listed in Table 1. Then, set the corresponding weights as \(\overline{\lambda }_i =\underline{\lambda }_i = 0.5,~i = 1,~ 2.\) By (3), the membership functions of the type-2 fuzzy model can be obtained. The lower and upper membership functions of the type-2 fuzzy controller are listed in Table 2. Then, set the corresponding weights as \(\overline{m}_k =\underline{m}_k = 0.5,~k= 1,~ 2.\) By (27), the membership functions of the type-2 controller can be obtained.
Set the \(H_\infty\) performance index as \(\gamma _o=0.1,\) and then solve the LMIs in (21)–(23). The resulting observer gain matrices are
Next, we design an output feedback controller in the form of (26). Set \(\gamma _c=2.5,~\varrho _1=\varrho _2=0.2,~\varrho _3=0.3,\) and calculate the LMIs in (29)–(32). The resulting controller gain matrices are
Applying the above controller to the system under consideration, the simulation results are displayed in Figs. 5, 6, 7 and 8. Figure 5 shows that the stabilization of the FOS is achieved, in spite of the measurement uncertainty, the persistent disturbance, and the persistent fault. Specifically, Fig. 6 clearly presents that the system output meets the prescribed \(H_\infty\) performance index. Besides, Figs. 7 and 8 indicate the effectiveness of the designed observer and the boundedness of the computed control signal and the actuator output, respectively. Therefore, the simulation results clarify and verify the theoretical findings established above.

The system state

The \(H_\infty\) performance with \(\gamma =2.5.\)

The estimation errors

The control signal and actuator output
For comparison, a non-fragile control design approach [17] for fractional order fuzzy systems is adopted. Apply it to the system in (65) under the same simulation condition. The result is displayed in Fig. 9, which shows that the state convergence is lost when \(t\ge 10\)s, due to the actuator faults. This in turn illustrates the superiority of our control approach in enhancing the fault tolerance of the control system.

The state response obtained by the comparative approach [17]
6 Conclusion
This paper presents an output feedback robust fault-tolerant control strategy for a class of interval type-2 fuzzy fractional order systems subject to the possible actuator faults. Its superiority over the existing approaches lies in three aspects. First, the stability domain of the faulty FOS is extended significantly. This is attributed to the introduction of the concept of D-stability to the control design and stability analysis, instead of the conventional indirect Lyapunov theory. Second, the resulting control system is robust against the measurement noise and external disturbances that, however, are not taken into account in the existing FTC designs for FOSs. This is achieved by adopting the \(H_\infty\) control method in a new way, in which the controller parameters are determined by solving real LMIs rather than complex matrix inequalities. As a byproduct, the FTC design is simplified. Third, our design approach is less restrictive than the existing ones: certain requirements for the system output matrix or the structure of the control gain matrices are eliminated. The simulation results on an electrical circuit system and a numeral example both illustrate the effectiveness of the proposed approach.
References
Podlubny, I.: Fractional Differential Equations. Academie Press, New York (1999)
Zhang, Q.H., Lu, J.G., Ma, Y.D., et al.: Time domain solution analysis and novel admissibility conditions of singular fractional-order systems. IEEE Trans. Circuits Syst. I: Regul. Pap. 68(2), 842–855 (2021)
Kaczorek, T., Rogowski, K.: Fractional Linear Systems and Electrical Circuits. Springer, Switzerland (2015)
Bagley, R.L., Calico, R.A.: Fractional order state equations for the control of viscoelastically damped structures. Proc. Damp. 14(2), 304–311 (1991)
Kadlčík, L., Horský, P.: A CMOS follower-type voltage regulator with a distributed-element fractional-order control. IEEE Trans. Circuits Syst. I: Regul. Pap. 65(9), 2753–2763 (2018)
Vinagre, B.M., Chen, Y., Petras, I.: Two direct Tustin discretization methods for fractional-order diferentiator/integrator. Frankl. Inst. 340, 349–362 (2003)
Matignon, D.: Stability properties for generalized fractional differential systems. ESAIM: Proc. 5, 145–158 (1998)
Sabatier, J., Moze, M., Farges, C.: LMI stability conditions for fractional order systems. Comput. Math. Appl. 59, 1594–1609 (2010)
Lu, J.G., Chen, G.R.: Robust stability and stabilization of fractional-order interval systems: an LMI approach. IEEE Trans. Autom. Control. 54(6), 1294–1299 (2009)
Lu, J.G., Chen, Y.Q.: Robust stability and stabilization of fractional-order interval systems with the fractional order \(\alpha\): the \(0<\alpha <1\) case. IEEE Trans. Autom. Control. 55(1), 152–158 (2010)
Zhang, X.F., Chen, Y.Q.: D-stability based LMI criteria of stability and stabilization for fractional order systems. In: The ASME 2015 International Design Engineering Technical Conference & Computers and Information in Engineering Conference, pp. 1–6 (2015)
Zhang, X.F., Chen, Y.Q.: Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order \(\alpha\): The \(0<\alpha <1\) case. ISA Trans. 82, 42–50 (2017)
Lan, Y.H., Zhou, Y.: Non-fragile observer-based robust control for a class of fractional-order nonlinear systems. Syst. Control Lett. 62, 1143–1150 (2013)
Zhang, X.F., Zhao, Z.L.: Normalization and stabilization for rectangular singular fractional order T-S fuzzy systems. Fuzzy Sets Syst. 381(15), 140–153 (2020)
Guo, Y., Lin, C., Chen, B., Wang, Q.G.: Stabilization for singular fractional-order systems via static output feedback. IEEE Access. 6, 71678–71684 (2018)
Zhang, X.F., Zhao, Z.L., Wang, Q.G.: Static and dynamic output feedback stabilisation of descriptor fractional order systems. IET Control Theory Appl. 9(12), 1236–1243 (2019)
Zhang, X.F., Jin, K.J.: Design of non-fragile controller for singular fractional order Takagi-Sugeno fuzzy systems. Int. J. Fuzzy Syst. 22(4), 1289–1298 (2020)
Lin, C., Chen, B., Wang, Q.G.: Static output feedback stabilization for fractional-order systems in T-S fuzzy models. Neurocomputing 218, 354–358 (2016)
Ji, Y., Su, L., Qiu, J.: Design of fuzzy output feedback stabilization for uncertain fractional-order systems. Neurocomputing 173, 1683–1693 (2016)
Zhang, X., Huang, W., Wang, Q.G.: Robust \(H_\infty\) adaptive sliding mode fault tolerant control for T-S fuzzy fractional order systems with mismatched disturbances. IEEE Trans. Circuits Syst. I: Regul. Pap. 68(3), 1297–1307 (2021)
Liang, S., Wei, Y.H., Pan, J.W., et al.: Bounded real lemmas for fractional order systems. Int. J. Autom. Comput. 12(2), 192–198 (2015)
Farges, C., Fadiga, L., Sabatier, J.: \(H_\infty\) analysis and control of commensurate fractional order systems. Mechatronics 23, 772–780 (2013)
Zhang, Q.H., Lu, J.G.: Bounded real lemmas for singular fractional-order systems: the \(1 < \alpha < 2\) case. IEEE Trans. Circuits Syst. II, Exp. Briefs. 10.1109/TCSII.2020.3007996
Yin, S., Yang, H., Kaynak, O.: Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults. IEEE Trans. Autom. Control. 62(7), 3551–3558 (2017)
Sami, M., Patton, R.J.: Active fault tolerant control for nonlinear systems with simultaneous actuator and sensor faults. Int. J. Control Autom. Syst. 11(6), 1149–1161 (2013)
Huang, S.J., Yang, G.H.: Fault tolerant controller design for T-S fuzzy systems with time-varying delay and actuator faults: a K-step fault-estimation approach. IEEE Trans. Fuzzy Syst. 22(6), 1526–1540 (2014)
Lan, J., Patton, R.J.: A new strategy for integration of fault estimation within fault-tolerant control. Automatica 69, 48–59 (2016)
Ladel, A.A., Benzaouia, A., Outbib, R., Ouladsine, M., Adel, E.M.E.: Robust fault tolerant control of continuous-time switched systems: an LMI approach. Nonlinear Anal.: Hybrid Syst. 39, 100950 (2021)
Chen, L., Zhao, Y., Fu, S., Liu, M., et al.: Fault estimation observer design for descriptor switched systems with actuator and sensor failures. IEEE Trans. Circuits Syst. I: Regul. Pap. 66(2), 810–819 (2019)
Zhang, K., Jiang, B., Staroswiecki, M.: Dynamic output feedback fault tolerant controller design for Takagi-Sugeno fuzzy systems with actuator faults. IEEE Trans. Fuzzy Syst. 18(1), 194–201 (2010)
Shen, H., Song, X., Wan, Z.: Robust fault-tolerant control of uncertain fractional-order systems against actuator faults. IET Control Theory Appl. 7(9), 1233–1241 (2013)
Sakthivel, R., Ahn, C.K., Joby, M.: Fault-Tolerant resilient control for fuzzy fractional order systems. IEEE Trans. Syst. Man Cybern. Syst. 49(9), 1797–1805 (2019)
Zhang, X.F., Dong, J., Li, L.: Fault-tolerant consensus of fractional order singular multi-agent systems with uncertainty. IEEE Access. 8, 68762–68771 (2020)
Li, H., Yang, G.H.: Dynamic output feedback \(H_\infty\) control for fractional-order linear uncertain systems with actuator faults. J. Frankl. Inst. 356(8), 4442–4466 (2019)
Wang, W.Y., Chien, Y.H., Leu, Y.G., Hsu, C.C.: Mean-based fuzzy control for a class of MIMO robotic systems. IEEE Trans. Fuzzy Syst. 24(4), 966–980 (2016)
Wang, W.Y., Chien, Y.H., Lee, T.T.: Observer-based T-S fuzzy control for a class of general nonaffine nonlinear systems using generalized projection-Uupdate laws. IEEE Trans. Fuzzy Syst. 19(3), 493–504 (2011)
Li, H.Y., Sun, X.J., Wu, L.G., Lam, H.K.: State and output feedback control of interval type-2 fuzzy systems with mismatched membership functions. IEEE Trans. Fuzzy Syst. 23(6), 1943–1957 (2015)
Lam, H.K., Li, H.Y., Deters, C., et al.: Control design for interval type-2 fuzzy systems under imperfect premise matching. IEEE Trans. Fuzzy Syst. 61(2), 956–968 (2014)
Lam, H.K., Seneviratne, L.D.: Stability analysis of interval type-2 fuzzy-model-based control systems. IEEE Trans. Syst. Man Cybern. Cybern. 38(3), 617–628 (2008)
Castillo, O., Melin, P.: Type-2 Fuzzy Logic. Springer, New York (2008)
Nguang, S.K., Shi, P., Ding, S.X.: Delay-dependent fault estimation for uncertain time-delay nonlinear systems: an LMI approach. Int. J. Robust Nonlinear Control. 16(18), 913–933 (2006)
Boyd, S., Ghaoui, L., Feron, E.: Linear Matrix Inequalities in System and Control Theory. Studies in Applied Mathematics, SIAM, Philadelphia (1994)
Funding
Funding were provided National Basic Research Program of China (973 Program) (Grant No. 2020YFB1710003), National Natural Science Foundation of China (Grant No. 62103093) and Fundamental Research Funds for the Central Universities (Grant No. N2108003).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jin, K., Zhang, JX. & Zhang, X. Output Feedback Robust Fault-Tolerant Control of Interval Type-2 Fuzzy Fractional Order Systems With Actuator Faults. Int. J. Fuzzy Syst. 24, 3277–3292 (2022). https://doi.org/10.1007/s40815-022-01339-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-022-01339-3