
Abstract
This paper addresses the \(H_{\infty }\) adaptive output feedback sliding mode fault-tolerant control problem for uncertain nonlinear fractional-order \(\hbox {systems}\) (FOSs) with \(0<\alpha <1\). The interval type-2 Takagi–Sugeno model is employed to represent the FOSs. Adaptive laws are designed to estimate the upper bounds of the nonlinear terms and mismatched disturbances. A reduced dimension sliding surface is constructed based on system output. A sufficient condition is established in terms of linear matrix inequalities to guarantee the stability of the sliding mode. Then, a control scheme based on fractional-order reaching law is proposed to make the resulting control system reach the sliding mode surface in a finite time. The effectiveness of proposed methods is illustrated by a numerical simulation example.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
FOSs are a generalization of the classical integer-order systems, which play an important role in practical applications, such as secret communication [1], artificial intelligence [2], signal processing [3] and industrial electronics [4]. Fractional calculus and fractional differential equation theory are the basis of FOSs. There are three main definitions of fractional calculus: Grünwald–Letnikov (G–L) definition [5], Rieman–Liouville (R–L) definition [6] and Caputo definition [7]. In fact, the Caputo definition is widely used in real-world physical systems. Stability is fundamental to FOSs. A basic theorem of asymptotic stability for FOSs is first proposed in [8]. On this basis, many methods of constructing solvable LMIs for the stability of FOSs have been published [9,10,11]. In [12], necessary and sufficient conditions of robust stability and stabilization of fractional-order interval systems with fractional order \(\alpha \): \(0<\alpha <1\) are developed. The fractional-order bounded real lemma corresponding to \(H_{\infty }\) norm is derived in [13]. In [14,15,16], the \(H_{\infty }\) control problems are addressed for nonlinear systems. Literature [17] extends the admissibility method of singular system of integer order to singular FOSs. Moreover, a type of delayed memristor-based fractional-order neural networks is studied in [18].
A large number of results about nonlinear systems based on T–S fuzzy model have been published [19,20,21,22,23,24]. Since the membership functions for this model do not contain uncertainty information, the control problem cannot be handled directly if the nonlinear plant is subject to parameter uncertainties. Thus, the interval type-2 T–S fuzzy model is presented to deal with uncertain grades of membership [25], and it has been validated that the interval type-2 T–S fuzzy model has little conservative in the approximation of nonlinearities and uncertainties of the systems [26]. Thanks to the interval type-2 T–S fuzzy models, the control problem of nonlinear FOSs can be solved well, e. g., in [27], a novel robust predictive controller is proposed for general interval type-2 fuzzy FOSs. In [28], a new adaptive interval type-2 fuzzy fractional-order backstepping sliding mode control method is considered. Synchronization of interval type-2 fuzzy fractional-order chaotic systems is presented in [29]. In summary, the interval type-2 T–S fuzzy model is an effective tool to control nonlinear systems, which inspired us to study this model.
It is well known that sliding mode control (SMC) is an effective control scheme for systems with uncertainties and nonlinearities. In [30, 31], the adaptive sliding mode controllers are designed for fuzzy systems with mismatched uncertainties. In [32], the optimal guaranteed cost SMC problem for time-delay systems is considered. The problem of sliding mode observer design for T–S fuzzy singular systems with time-delay is addressed in [33]. There are many results related to SMC for FOSs [34, 35]. However, in [36,37,38], the integral type sliding surfaces s(t) composed of \({\mathcal {D}}^{\alpha -1}x(t)\) are constructed. We take the first derivative of the sliding surface, and \(\dot{s}(t)=0\) is true if fractional calculus is the R–L definition instead of Caputo. Literature [39] designs the sliding surface by using a reduced-order system to overcome this \(\mathrm {defect}\). In [40], the adaptive backstepping hybrid fuzzy SMC scheme is studied for nonlinear FOSs. In [41, 42], the problem of designing a sliding mode controller via output feedback is investigated. However, the actuator faults are not taken into account in these works, which often appear in practical systems.
Fault-tolerant control (FTC) can make the closed-loop system insensitive to actuator faults by using robust control technology without changing the controller structure, so that the system can still work normally after actuator faults [43,44,45]. In [46], adaptive neural FTC for MIMO nonlinear systems is discussed. Literature [47] studies the fault-tolerant optimal control for nonlinear large-scale systems. The problems of fault-tolerant control for nonlinear fractional-order multi-agent systems are solved in [48, 49]. In addition, FTC can also solve the problem of actuator faults in Euler–Lagrange systems [50]. As a tool to deal with robust control, SMC technology can be well combined with FTC. The problem of sliding mode FTC is addressed for nonlinear systems with distributed delays in [51]. Literature [52] designs the sliding mode observer based on FTC for nonlinear systems with output disturbances. As for Markov jump systems, an adaptive sliding mode FTC method is developed in [53]. However, the state variables are not measurable in practical applications, and thus, it is necessary to investigate the output feedback FTC problem. The static output feedback controller is designed in [54] but the condition of Theorem 3 is bilinear matrix inequalities and cannot be solved by MATLAB LMI Control Toolbox. In [55], The developed results are LMIs for the output feedback case but it requires the information of state variables to be known first. The output feedback control is used to stabilize singular FOSs in [56] and the output matrix C needs to satisfy a particular form \(\big [C_1~~0\big ]\), which is conservative.
In view of the above observations, how to design the robust \(H_\infty \) adaptive output feedback sliding mode fault-tolerant controller for interval type-2 T–S fuzzy FOSs still remains an open problem. This paper fills in this gap and presents the following contributions.
-
A framework based on the interval type-2 fuzzy model is established to express the nonlinear FOSs.
-
An \(H_{\infty }\) control method is constructed to deal with the mismatched external disturbances.
-
A sliding surface with reduced dimension is constructed only based on system output. The obtained result is more general and efficient than the existing works.
-
An adaptive sliding mode control law is designed to estimate the unknown terms and enable the FOSs to reach the sliding mode surface in a finite time.
-
The sliding mode fault-tolerant controller for FOSs with Caputo derivative is devised, and successfully avoids using the R–L definition as in the other papers.
This paper is organized as follows: The system description and preliminaries are given in Sect. 2. The output feedback sliding mode fault-tolerant controller is designed in Sect. 3, a simulation example is given in Sect. 4. Finally, the conclusion is drawn in Sect. 5.
Notations Let \({\mathbb {R}}\), \({\mathbb {R}}^{n}\) and \({\mathbb {R}}^{m\times n}\) be the sets of real numbers, n dimensional real vectors, and m by n real matrices, respectively. \(M^{\mathrm {T}}\) is the transpose of an matrix M. \(X>0~(\mathrm {resp}.,X<0)\) means that X is a positive (resp., negative) definite matrix. \(*\) indicates the symmetric part of a matrix, such as \(\left[ \begin{array}{cc}{A} &{} {*} \\ {B} &{} {C}\end{array}\right] =\left[ \begin{array}{cc}{A} &{} {B^{\mathrm {T}}} \\ {B} &{} {C}\end{array}\right] .\) \(||\cdot ||\) stands for the Euclidean norm of a vector or its induced norm of a matrix. Let \(\mathrm {sym}(Y)=Y+Y^T\), \(\alpha _s=\sin \left( \frac{\alpha \pi }{2}\right) \) and \(\alpha _c=\cos \left( \frac{\alpha \pi }{2}\right) .\)
2 Problem formulation and preliminaries
In this paper, we use the Caputo derivative to describe FOSs because its Laplace transform allows using initial values of classical integer-order derivatives with clear physical interpretations. The \(\alpha \)th Caputo fractional derivative of f(t) is defined as
where \(n-1<\alpha <n,\) n is a positive integer and \(\Gamma (\cdot )\) is the Gamma function [7] which is defined by
Consider a nonlinear FOS of the fractional order \(0<\alpha <1,\) which is represented by the interval type-2 fuzzy model as follows
Fuzzy rule i : IF \({\zeta }_1(\theta (t))\) is \(M_1^i,\) \({\zeta }_2(\theta (t))\) is \(M_2^i, \ldots \), and \({\zeta }_s(\theta (t))\) is \(M_s^i,\) THEN
where \(M_j^i\) is the interval type-2 fuzzy set of the ith rule, \({\zeta }_j(\theta (t))\) is the jth measurable premise variable, \(i=1,2,\ldots ,p,~j=1,2,\ldots ,s\), p is the number of fuzzy rules, and s is the number of the fuzzy set. \(x(t)\in {\mathbb {R}}^n\) and \(y(t)\in {\mathbb {R}}^q \) are the system state and the output, respectively. \(A_i\in {\mathbb {R}}^{n\times n}, \) \(B_i\in \) \({\mathbb {R}}^{n\times m},\) C \(\in \) \({\mathbb {R}}^{q\times n}\) and \(D_i\) \(\in \) \({\mathbb {R}}^{n\times h}\) are \(\mathrm {constant}\) matrices. We assume \(B_1=B_2=\cdots =B_p=B\), \(\mathrm {rank}(B)=m,\) \(\mathrm {rank}(C)=q \) and \(m<q<n.\) \(\Delta A_i\) and \(\Delta D_i\) are uncertain parameter matrices of the following form,
where \(S_i,\) \(N_{1i},\) and \(N_{2i}\) are known constant matrices, \(\Delta Q_i\) is an unknown matrix function with Lebesgue-measurable elements and satisfies
\(g_i(t,x(t))\) represents the system nonlinearity and satisfies
where \(\sigma _{1i}\) and \(\sigma _{2i}\) are unknown positive constants. \(w(t)\in {\mathbb {R}}^h\) is the unmatched disturbance which is assumed to belong to \(L_2[0,\infty ).\) We have
where \(\varpi \) is an unknown positive real constant.
Suppose that the actuators subject to the faults are modelled by
where v(t) is the output of the actuator and comes to system (2) as the input, u(t) is the input to the actuator and the output of the controller to be designed.
where \(\lambda _l~ (l=1, \ldots , m)\) represents the unknown efficiency factor of lth actuator and represents the unknown efficiency factor of lth actuator and \(0 \le \lambda _l \le 1\), \({f}_l(t)\) is the unknown stuck fault of lth actuator. It is reasonable to assume that \({f}_l(t)\) is bounded by
where \({f}_l\) is an unknown positive real constant. For \(l=1,\ldots , m,\) note that (6) implies the following four cases:
-
(1)
The fault-free case: \(\lambda _l=1,\) and \({f}_l(t)=0;\)
-
(2)
The partial loss of effectiveness (PLOE) fault case: \(0< \lambda _l<1;\)
-
(3)
The total loss of effectiveness (TLOE) fault case: \(\lambda =0;\)
-
(4)
The stuck fault case: \({f}_l(t)\ne 0.\)
Remark 1
The actuator model in this manuscript is more comprehensive than that in [44, 50, 52]. In [44], the norm of the fault is known. Therefore, the adaptive control method is not considered. In [50], only the partial loss of effectiveness fault case is considered. On the contrary, the partial loss of effectiveness fault case is not taken into account in [52].
The firing interval of the ith rule is as follows: \(\Psi _i(\theta (t))\in [{\underline{\psi }}_i(\theta (t)),{\overline{\psi }}_i(\theta (t))],\) where
The lower and upper membership functions are represented by \({\underline{\mu }}_{M_j^i}({\zeta }_j(\theta (t)))\in [0,1]\) and \({\overline{\mu }}_{M_j^i}({\zeta }_j(\theta (t)))\in [0,1],\) respectively. This indicates the property that
Then, the established system (2) is rewritten as
where \(\psi _i(\theta (t))\) is the grade of membership function of the ith local system, which is set as
with
and \({\underline{\upsilon }}_i(\theta (t))\) and \({\overline{\upsilon }}_i(\theta (t))\) are weighting coefficient functions that can express the change of the uncertain parameters. To design an adaptive sliding mode FTC controller in this paper, the weight \({\overline{\upsilon }}_i(\theta (t))\) of the ith membership grade function in (10) satisfies the following condition:
where \(\delta _i\) is the maximum value of \({\overline{\upsilon }}_i(\theta (t)),\) which is unknown. Moreover, from (10) it follows that \(0\le 1-\delta _i \le {\underline{\upsilon }}_i(\theta (t)) \le 1.\)
Substituting the actuator model (6) into (8) yields
The objective of this paper is to design output feedback sliding mode fault-tolerant controller for the system in (3) and (12).
Let the nonsingular matrix \(T=\big [L_1^{\mathrm {T}}~~L_2^{\mathrm {T}}\big ]^{\mathrm {T}}\) and \(T^{-1}=\big [E_1~~E_2\big ],\) where \(L_1\in {\mathbb {R}}^{(n-m)\times n},\) \(E_1\in {\mathbb {R}}^{n\times (n-m)},\) \(L_2\in {\mathbb {R}}^{m\times n},\) \(E_2\in {\mathbb {R}}^{n\times m}\). According to [42], by the state transformation \(z(t)=Tx(t),\) the system in (3) and (12) has the following form:
where \({\overline{A}}_i=TA_iT^{-1},\) \(\Delta {\overline{A}}_i=T\Delta A_iT^{-1},\) \(B_2\in {\mathbb {R}}^{m \times m},\) and \(C_2 \in {\mathbb {R}}^{q \times q}.\)
We define
Let \(z(t)=\left[ \begin{array}{cc} z_1^{\mathrm {T}}(t) &{} z_2^{\mathrm {T}}(t)\\ \end{array}\right] ^{\mathrm {T}},\) where \(z_1(t) \in {\mathbb {R}}^{n-m},\) \(z_2(t)\in {\mathbb {R}}^{m}.\) From (13) and (14), one has
The following lemmas are necessary for subsequent analysis. Consider a nominal FOS,
The transfer function of (18) and (19) is given by
Lemma 1
[13] FOS in (18) and (19) is asymptotically stable and meets \(||T_{wy}(s)||_{\infty }\le \gamma \) if there exist two matrices \(X, Y \in {\mathbb {R}}^{n\times n} \) such that
Lemma 2
[12] There hold
if and only if there exists a positive scalar \(\epsilon \) such that
where \(\Omega ,~\Gamma , ~\Theta , ~ \Delta Q\) are given matrices of appropriate dimension, and \(\Omega \) is symmetric.
Lemma 3
For the matrix \(\Xi =\big [0_{(q-m) \times (n-q)}~~I_{q-m}\big ],\) there exists two matrix \({\overline{P}} \in {\mathbb {R}}^{(n-m)\times (n-m)}\) and \(P \in {\mathbb {R}}^{(q-m)\times (q-m)}\) satisfying \(\Xi {\overline{P}}=P\Xi \) if \({\overline{P}}\) is expressed as
where \({\overline{P}}_{11} \in {\mathbb {R}}^{(n-q)\times (n-q)},\) \({\overline{P}}_{12}\in {\mathbb {R}}^{(n-q)\times (q-m)},\) \({\overline{P}}_{22}\in {\mathbb {R}}^{(q-m)\times (q-m)}.\)
Proof
If the matrix \({\overline{P}}\) is expressed as (23), we get
Letting \(P={\overline{P}}_{22},\) we have \(\Xi {\overline{P}}=P\Xi .\) \(\square \)
Lemma 4
[7] Let \(x(t) \in {\mathbb {R}}^n\) be a continuous and differentiable function of t for \(t \ge t_0.\) Then, there holds
Lemma 5
[9] There holds \({\mathcal {D}}^{-\alpha }|f(t)| > 0,\) if f(t) is an integrable function over (0, t) and \(f(t_1) \ne 0\) for some \(t_1 \in (0,t)\).
3 Controller design
In this section, the output feedback sliding mode FTC problem is investigated in two steps. The first step is to design a suitable sliding surface. The next step is to devise an adaptive control law that forces the system state to reach the sliding surface in a finite time under the actuator faults.
3.1 Sliding surface design
The sliding surface is chosen as
where \(K\in {\mathbb {R}}^{m\times (q-m)}\) is the parameter to be designed later. It follows from (24) that
where \(C_1=\left[ 0_{(q-m)\times (n-q)}~~I_{q-m}\right] .\) When the system in (13) and (14) runs on the sliding surface (24), it satisfies \(z_2(t)=KC_1z_1(t)\) and
Remark 2
Since the sliding motion in (26) and (27) is a \(n-m\) dimensional subsystem of the system in (15)–(17), sliding surface (24) is regarded as the reduced dimension sliding surface. Compared with the integral sliding surface proposed in [30, 36, 40], sliding surface (24) does not involve state information. In practice application, the system state is often unavailable but the system output can be measurable. Thus, sliding surface (24) is more applicable for designing.
Theorem 1
The sliding motion in (26) and (27) is asymptotically stable with \(H_{\infty }\) norm bound \(\gamma ,\) and the sliding surface is given by
if there exist positive scalars \(\epsilon _{1i}\), \(\epsilon _{2i},\) and \(\epsilon _{3i} (i=1, 2, \ldots , p)\), and matrices \(X_1 \in \mathbb {R}^{(n-q)\times (n-q)}\), \(X_2\in \mathbb {R}^{(q-m)\times (q-m)}\), \(X_3\in \mathbb {R}^{(n-q)\times (q-m)}\), \(Z\in \mathbb {R}^{m\times (q-m)}\), \(Y_1\in \mathbb {R}^{(n-q)\times (n-q)}\), and \(Y_2\in \mathbb {R}^{(q-m)\times (q-m)}\) such that (21) and the following LMIs hold
where
and \({\overline{P}}=\alpha _sX-\alpha _cY.\)
Proof
By Lemma 1, the sliding motion in (26) and (27) is asymptotically stable with \(H_{\infty }\) norm bound \(\gamma ,\) if there exist five matrices \(X_1 \in {\mathbb {R}}^{(n-q)\times (n-q)}\), \(X_2\in {\mathbb {R}}^{(q-m)\times (q-m)}\), \(X_3\in {\mathbb {R}}^{(n-q)\times (q-m)}\), \(Y_1\in {\mathbb {R}}^{(n-q)\times (n-q)}\), and \(Y_2\in {\mathbb {R}}^{(q-m)\times (q-m)}\) such that (21), (30) and the following LMI hold
It follows from Lemma 2 that there are scalars \(\epsilon _{1i},\) \(\epsilon _{2i}, \) \(\epsilon _{3i}>\) 0, such that
Applying the Schur complement lemma to (29), for \(i=1, 2, \ldots , p,\) one obtains
where
According to Lemma 3, it follows
Noting that (36) together with (33)–(35) implies (32). This completes the proof. \(\square \)
Remark 3
In Theorem 1, since the unknown skew symmetric matrix Y contains three unknown matrices \(Y_1\), \(Y_2\), \(X_3\), and the coefficient \(\frac{\alpha _a}{\alpha _c}\), it is hard to define Y through lmivar function by MATLAB LMI Toolbox, which leads to the difficulty in calculating LMI conditions (21) and (29) of Theorem 1. In addition, (21) essentially contains an equality constraint of \(Y^{\mathrm {T}}=-Y,\) The next theorem overcomes this weakness.
Theorem 2
The sliding motion in (26) and (27) is asymptotically stable with \(H_{\infty }\) norm bound \(\gamma ,\) and the sliding surface is given by
if there exist positive scalars \(\epsilon _{1i}\), \(\epsilon _{2i}\), and \(\epsilon _{3i} (i=1, 2, \ldots , p)\), and matrices \({\overline{P}}_{11} \in {\mathbb {R}}^{(n-q)\times (n-q)}\), \({\overline{P}}_{12}\in {\mathbb {R}}^{(n-q)\times (q-m)}\), \({\overline{P}}_{22}\in {\mathbb {R}}^{(q-m)\times (q-m)}\), \(Z\in {\mathbb {R}}^{m\times (q-m)}\), such that (29) and the following LMI hold
where \({\overline{P}}\), \(\Upsilon _i\) are defined in (23), (31), respectively.
Proof
By setting \({\overline{P}}_{11}=\alpha _s X_1-\alpha _c Y_1,\) \({\overline{P}}_{12}=2\alpha _sX_3,\) and \({\overline{P}}_{22}=\alpha _sX_2-\alpha _cY_2\) in Theorem 1, it follows from (21) that
Pre- and post-multiplying (39) by
and its transpose, respectively, (38) is obtained immediately. This completes the proof. \(\square \)
Remark 4
The LMI conditions which do not involve the skew symmetric matrix are developed in Theorem 2. The equality constraint is removed. Therefore, Theorem 2 can be regarded as improvement of the result obtained in [12, 13, 17]. In addition, Theorem 2 avoids the complex even incapable computation of bilinear matrix inequalities [54] and iterative operations [21], which is more general and efficient than the existing works [12, 13, 17, 21, 54].
3.2 Control law design
A novel adaptive sliding mode control law is designed such that the trajectory of system (13) moves to the sliding surface \(s(t)=0\) in a finite time. If LMIs (22) and (29) in Theorem 1 are solvable, z(t) of system (13) is bounded. Therefore, the state z(t) satisfies
where \(\sigma \) is an unknown positive constant.
For \(i=1, 2, \ldots , p\) and \(l=1, 2, \ldots , m\), let \({\widehat{\sigma }}(t),\) \({\widehat{\varpi }}(t),\) \({\widehat{\lambda }}_l(t),\) \(\widehat{{f}}_{l}(t),\) \({\widehat{\sigma }}_{1i}(t),\) \({\widehat{\sigma }}_{2i}(t),\) \({\widehat{\delta }}_{i}(t)\) be the estimates for \(\sigma \), \(\varpi ,\) \(\lambda _l,\) \({f}_l,\) \(\sigma _{1i},\) \(\sigma _{2i},\) \(\delta _{i}\), respectively. The estimated errors are denoted as
We have
Based on (41) and (42), The following sliding mode control law is designed.
where
and \(\eta _0\) is a small positive value. The parameters are updated by the following adaptive laws,
where
Proj\(\{\cdot \}\) is the projection operator [51], whose role is to project the estimates to the interval [0, 1], \(\beta _1,\) \(\beta _2\), \(\beta _{3l}\), \(\beta _{4l}\), \(\beta _{5i}\), \(\beta _{6i}\) and \(\beta _{7i}\) are positive design parameters with \(0\le {\widehat{\delta }}_{i}(0)\le 1~(i=1,2,\ldots ,p).\) \(\varepsilon _{rl}\) and \(\varepsilon _{cl}\) are row vectors and column vectors of m-dimensional unit matrices, respectively.
Theorem 3
The state trajectory of system (13) converges to the sliding surface (28) in a finite time by the control law (43).
Proof
Construct the Lyapunov function candidate as
Taking the Caputo fractional derivative of V(t) and using Lemma 4, we get
It follows from (13) that
With control law (43), (54) is rewritten as
Substituting (44) into (55) yields
Combining (45)–(51) and (56) gives
Considering \(1-{\widetilde{\delta }}_{i}(t)=1-{\widehat{\delta }}_{i}(t)+\delta _i\ge 0,\) one has
which implies that the trajectory of system (13) moves to the sliding surface \(s(t) = 0\).
To find the reaching time, by computing the fractional integral of both sides of (58) from 0 to the reaching time \(t_r\), we have
By Lemma 5, it follows that \({\mathcal {D}}^{-\alpha }||s(t)|| \ge T_0 >0.\) Since \(s(t_r)=0\) and the estimated error converges to 0, one gets
which gives
Therefore, the trajectory of system (13) moves to the sliding surface in the finite time \(t_r\) by the control law (43). This completes the proof. \(\square \)
4 A simulation example
An illustrative example is presented to show the effectiveness of the sliding mode state feedback controller.
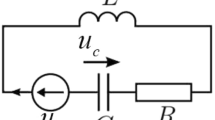
Consider the following plant represented by two-rule fuzzy systems based on (2) and (3).
Plant rule i : IF \(x_i(t)\) is \(\psi _i(x_1(t))\), RHEN
where \(\alpha =0.4,\)
The membership function is
where \(a(t) \in [2,~4]\) denotes the parametric uncertainty. Then, the lower and upper membership functions are as Table 1.
To describe the varieties of the uncertain parameter by the lower and upper membership functions, the weight coefficients of the fuzzy rule 1 are assumed as
Then, the real membership functions are determined by
Figures 1 and 2 show the real membership functions and their bounds. The footprint of the uncertainty of the real membership functions \(\psi _1(x_1(t))\) and \(\psi _2(x_1(t))\) are also depicted in the shaded part of Figs. 1 and 2, respectively.

Membership function \(\psi _1(x_1(t))\)

Membership function \(\psi _2(x_1(t))\)
It follows from (12) that
A feasible solution of (29) and (38) in Theorem 2 is obtained by MATLAB LMI Control Toolbox as
Thus, the linear sliding surface is
Using the same parameters, we consider Theorem 1 in [16]. By solving LMI (21) in [16], the following information is obtained by MATLAB LMI Toolbox, which means Theorem 1 is invalid in this case.

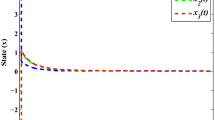
State trajectory of system (12) under the adaptive sliding mode FTC law

Surface function s(t)

Adaptive sliding mode FTC law u(t)

Adaptive parameter \({\widehat{\sigma }}(t)\)

Adaptive parameter \({\widehat{\varpi }}(t)\)

Adaptive parameter \({\widehat{\lambda }}_1(t)\)

Adaptive parameter \(\widehat{{f}}_1(t)\)

Adaptive parameters \({\widehat{\sigma }}_{11}(t)\) and \({\widehat{\sigma }}_{12}(t)\)

Adaptive parameters \({\widehat{\sigma }}_{21}(t)\) and \({\widehat{\sigma }}_{22}(t)\)

Adaptive parameters \({\widehat{\delta }}_{1}(t)\) and \({\widehat{\delta }}_{2}(t)\)
Result: could not establish feasibility nor infeasibility.
Remark 5
The \(H_{\infty }\) control scheme proposed in this paper is more efficient than that in [16]. The integer-order Lyapunov method is used in [16], which leads to the fact that Theorem 1 in [16] has no feasible solution under the same condition of system (62).
For the sliding mode controller in (43), we select \(\beta _{1}=\beta _{2}=0.15,\) \(\beta _{31}=\beta _{41}=0.01,\) \(\beta _{i1}=\beta _{i2}=0.01 ~(i=5,6,7)\). Take the initial state,
and the initial estimates,
The control system consisting of (3), (12) and (43) is simulated. The state trajectory of system (12) is depicted in Fig. 3. The controller works well when the actuator is faulty and it guarantees the stability of the system. Figure 4 plots the surface function s(t). Figure 5 gives the control law u(t) for system (12). Figures 6, 7, 8, 9, 10, 11 and 12 illustrate the estimates of adaptive parameters, which show the effectiveness of the adaptive estimation method.
5 Conclusion
This paper proposes the sliding mode FTC scheme for type-2 T–S fuzzy FOSs with mismatched uncertainties and disturbances. The biggest contribution of this paper is to design the output feedback controller, which guarantees that the system is stable with \(H_{\infty }\) norm bound \(\gamma \) on the sliding surface. The numerical example is utilized to illustrate the effectiveness of the designed controller. The FOSs with distributed delays will be further considered with the approximation of neural network for any nonlinear term to remove the condition of the nonlinear term with norm bounded uncertainties.
References
Li, R.G., Wu, H.N.: Adaptive synchronization control with optimization policy for fractional-order chaotic systems between 0 and 1 and its application in secret communication. ISA Trans. 92, 35–48 (2019)
Moosavi, V., Malekinezhad, H., Shirmohammadi, B.: Fractional snow cover mapping from MODIS data using wavelet-artificial intelligence hybrid models. J. Hydrol. 511, 160–170 (2014)
Tavazoei, M.S., Haeri, M., Siami, M., Bolouki, S.: Maximum number of frequencies in oscillations generated by fractional order LTI systems. IEEE Trans. Signal Process. 58(8), 4003–4012 (2010)
Jiang, Y.W., Zhang, B.: High-power fractional-order capacitor with \(1<\alpha <2\) based on power converter. IEEE Trans. Ind. Electron. 65(4), 3157–3164 (2018)
Garrappa, Roberto: Grünwald–Letnikov operators for fractional relaxation in Havriliak–Negami models. Commun. Nonlinear Sci. Numer. Simul. 38, 178–191 (2016)
Gu, Y.J., Wang, H., Yu, Y.G.: Stability and synchronization for Riemann–Liouville fractional-order time-delayed inertial neural networks. Neurocomputing 340(7), 270–280 (2019)
Norelys, A.C., Manuel, A.D.M., Javier, A.G.: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19, 2951–2957 (2014)
Matignon, D.: Stability properties for generalized fractional differential systems. ESAIM Proc. 5, 145–158 (1998)
Wang, J., Shao, C.F., Chen, Y.Q.: Fractional order sliding mode control via disturbance observer for a class of fractional order systems with mismatched disturbance. Mechatronics 53, 8–19 (2018)
Chen, K., Tang, R.N., Li, C., Wei, P.N.: Robust adaptive fractional-order observer for a class of fractional-order nonlinear systems with unknown parameters. Nonlinear Dyn. 94, 415–427 (2018)
Sabzalian, M.H., Mohammadzadeh, A., Lin, S.Y., Zhang, W.D.: Robust fuzzy control for fractional-order systems with estimated fraction-order. Nonlinear Dyn. 98, 2375–2385 (2019)
Lu, J.G., Chen, Y.Q.: Robust stability and stabilization of fractional-order interval systems with the fractional order \(\alpha :0<\alpha <1\) case. IEEE Trans. Autom. Control 55(1), 152–158 (2010)
Liang, S., Wei, Y.H., Pan, J.W., Gao, Q., Wang, Y.: Bounded real lemmas for fractional order systems. Int. J. Autom. Comput. 12(2), 192–198 (2015)
Song, X.N., Wang, N., Ahn, C.K., Song, S.: Finite-time \(H_{\infty } \) asynchronous control for nonlinear Markov jump distributed parameter systems via quantized fuzzy output-feedback approach. IEEE Trans. Cybern. 50(9), 4098–4109 (2020)
Song, X.N., Wang, N., Zhang, B.Y., Song, S.: Event-triggered reliable \(H_{\infty }\) fuzzy filtering for nonlinear parabolic PDE systems with Markovian jumping sensor faults. Inf. Sci. 510, 50–69 (2020)
N’Doye, I., Laleg-Kirati, T.M., Darouach, M., Voos, H.: \(H_{\infty }\) adaptive observer for nonlinear fractional-order systems. Int. J. Adapt. Control Signal Process. 31(3), 314–331 (2016)
Zhang, X.F., Chen, Y.Q.: Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order \(alpha\): the \(0 < \alpha < 1\) case. ISA Trans. 82, 42–50 (2017)
Chen, C.Y., Zhu, S., Wei, Y.C., Yang, C.Y.: Finite-time stability of delayed memristor-based fractional-order neural networks. IEEE Trans. Cybern. 50(4), 1607–1616 (2020)
Wei, Y.H., Tse, P.W., Yao, Z., Wang, Y.: Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dyn. 86, 1047–1056 (2016)
Song, S., Zhang, B.Y., Song, X.N., Zhang, Y.J., Zhang, Z.Q., Li, W.J.: Fractional-order adaptive neuro-fuzzy sliding mode \(H_{\infty }\) control for fuzzy singularly perturbed systems. J. Frank. Inst. 356, 5027–5048 (2019)
Lin, C., Chen, J., Chen, B., Guo, L., Zhang, Z.Y.: Fuzzy normalization and stabilization for a class of nonlinear rectangular descriptor systems. Neurocomputing 219, 263–268 (2017)
Liu, H., Pan, Y.P., Li, S.G., Chen, Y.: Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 47(8), 2209–2217 (2017)
Ma, Z.Y., Ma, H.J.: Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 28(1), 112–133 (2020)
Lin, T.-C., Lee, T.-Y., Balas, V.E.: Adaptive fuzzy sliding mode control for synchronization of uncertain fractional order chaotic systems. Chaos Solitons Fractals 44, 791–801 (2011)
Lam, H.K., Seneviratne, L.D.: Stability analysis of interval type-2 fuzzy-model-based control systems. IEEE Trans. Syst. Man Cybern. B (Cybern.) 38(3), 617–627 (2008)
Feng, Z.G., Shi, P.: Admissibilization of singular interval-valued fuzzy systems. IEEE Trans. Fuzzy Syst. 25(6), 1765–1775 (2017)
Mohammadzadeh, A., Kumbasar, T.: A new fractional-order general type-2 fuzzy predictive control system and its application for glucose level regulation. Appl. Soft Comput. https://doi.org/10.1016/j.asoc.2020.106241
Moezi, S.A., Zakeri, E., Eghtesad, M.: Optimal adaptive interval type-2 fuzzy fractional-order backstepping sliding mode control method for some classes of nonlinear systems. ISA Trans. 93, 23–39 (2019)
Mohammaazadeh, A., Ghaemi, S., Kaynak, O., Khanmohammadi, S.: Observer-based method for synchronization of uncertain fractional order chaotic systems by the use of a general type-2 fuzzy system. Appl. Soft Comput. 49, 544–560 (2016)
Gao, Q., Liu, L., Feng, G., Wang, Y., Qiu, J.B.: Universal fuzzy integral sliding-mode controllers based on T–S fuzzy models. IEEE Trans. Fuzzy Syst. 22(2), 350–362 (2014)
Zhang, J.H., Shi, P., Xia, Y.Q.: Robust adaptive sliding-mode control for fuzzy systems with mismatched uncertainties. IEEE Trans. Fuzzy Syst. 18(4), 700–711 (2010)
Li, H.Y., Wang, J.H., Wu, L.G., Lam, H.K., Gao, Y.B.: Optimal Guaranteed cost sliding-mode control of interval type-2 fuzzy time-delay systems. IEEE Trans. Fuzzy Syst. 26(1), 246–256 (2018)
Li, R.C., Yang, Y.: Sliding-mode observer-based fault reconstruction for T–S fuzzy descriptor systems. IEEE Trans. Syst. Man Cybern. Syst. https://doi.org/10.1109/TSMC.2019.2945998.
Shao, S.Y., Chen, M., Yan, X.H.: Adaptive sliding mode synchronization for a class of fractional-order chaotic systems with disturbance. Nonlinear Dyn. 83, 1855–1866 (2016)
Meng, B., Wang, X.H., Wang, Z.: Synthesis of sliding mode control for a class of uncertain singular fractional-order systems-based restricted equivalent. IEEE Access 7, 96191–96197 (2019)
Gao, Z., Liao, X.Z.: Integral sliding mode control for fractional-order systems with mismatched uncertainties. Nonlinear Dyn. 72, 27–35 (2013)
Li, R.C., Zhang, X.F.: Adaptive sliding mode observer design for a class of T–S descriptor fractional order systems. IEEE Trans. Fuzzy Syst. 28(9), 1951–1960 (2020)
Yang, N.N., Liu, C.X.: A novel fractional-order hyperchaotic system stabilization via fractional sliding-mode control. Nonlinear Dyn. 74(3), 721–732 (2013)
Chen, L.P., Wu, R.C., He, Y.G., Chai, Y.: Adaptive sliding-mode control for fractional-order uncertain linear systems with nonlinear disturbances. Nonlinear Dyn. 80, 51–58 (2015)
Song, S., Zhang, B.Y., Xia, J.W., Zhang, Z.Q.: Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. Syst. Man Cybern. Syst. 50(4), 1559–1569 (2020)
Li, H.Y., Wang, J.H., Shi, P.: Output-feedback based sliding mode control for fuzzy systems with actuator saturation. IEEE Trans. Fuzzy Syst. 24(6), 1282–1292 (2016)
Zhang, J.H., Xia, Y.Q.: Design of static output feedback sliding mode control for uncertain linear systems. IEEE Trans. Ind. Electron. 57(6), 2161–2170 (2010)
Wang, S., Dong, D.Y.: Fault-tolerant control of linear quantum stochastic systems. IEEE Trans. Autom. Contorl 62(6), 2929–2935 (2017)
Li, H., Yang, G.H.: Dynamic output feedback \(H_{\infty }\) control for fractional-order linear uncertain systems with actuator faults. J. Frank. Inst. 356, 4442–4466 (2019)
Zhang, J.X., Yang, G.H.: Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 62(12), 6529–6535 (2017)
Gao, H., Song, Y.D., Wen, C.Y.: Backstepping design of adaptive neural fault-tolerant control for MIMO nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 28(11), 2605–2613 (2017)
Yoo, S.J., Park, J.B.: Neural-network-based decentralized adaptive control for a class of large-scale nonlinear systems with unknown time-varying delays. IEEE Trans. Sys. Man Cybern. B (Cybern.) 39(5), 1316–1323 (2009)
Chen, S., Ho, D.W.C., Li, L.L., Liu, M.: Fault-tolerant consensus of multi-agent system with distributed adaptive protocol. IEEE Trans. Cybern. 45(10), 2142–2155 (2015)
Zuo, Z.Q., Zhang, J., Wang, Y.J.: adaptive fault-tolerant tracking control for linear and lipschitz nonlinear multi-agent systems. IEEE Trans. Ind. Electron. 62(6), 3923–3931 (2015)
Zhang, J.X., Yang, G.H.: Fault-tolerant output-constrained control of unknown Euler–Lagrange systems with prescribed tracking accuracy. Automatic 111, 108606 (2020)
Zhao, Y., Wang, J.H., Yan, F., Shen, Y.: Adaptive sliding mode fault-tolerant control for type-2 fuzzy systems with distributed delays. Inf. Sci. 473, 227–238 (2019)
Yin, S., Yang, G.H., Kaynak, O.: Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults. IEEE Trans. Autom. Control 62(7), 3551–3558 (2017)
Li, H.Y., Shi, P., Yao, D.Y.: Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults. IEEE Trans. Autom. Control 62(4), 1933–1939 (2017)
Marir, S., Chadli, M., Bouagada, D.: New admissibility conditions for singular linear continuous-time fractional-order systems. J. Frank. Inst. 354, 752–766 (2017)
Wei, Y.H., Wang, J.C., Liu, T.Y., Wang, Y.: Sufficient and necessary conditions for stabilizing singular fractional order systems with partially measurable state. J. Frank. Inst. 356, 1975–1990 (2019)
Zhang, X.F., Zhao, Z.L., Wang, Q.G.: Static and dynamic output feedback stabilisation of descriptor fractional order systems. IET Control Theory Appl. 14(2), 324–333 (2020)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhang, X., Huang, W. Robust \(H_{\infty }\) adaptive output feedback sliding mode control for interval type-2 fuzzy fractional-order systems with actuator faults. Nonlinear Dyn 104, 537–550 (2021). https://doi.org/10.1007/s11071-021-06311-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06311-8