
Abstract
The rising level of atmospheric carbon dioxide (\(CO _{2}\)) gas is a matter of concern due to its impact on global climate change. The accomplishment of the goal of climate change mitigation requires a reduction in the \(CO _{2}\) concentration in near future. The forest management programs offer an avenue to regulate atmospheric \(CO _{2}\) levels. This paper presents a four-dimensional nonlinear mathematical model to study the impact of forest management policies on the mitigation of atmospheric \(CO _{2}\) concentrations. It is assumed that forest management programs are applied according to the difference of forest biomass density from its carrying capacity. The forest management programs are assumed to work twofold: first, they increase the forest biomass and secondly they reduce the deforestation rate. Model analysis shows that the atmospheric level of \(CO _{2}\) can be effectively curtailed by increasing the implementation rate of forest management options and their efficacy. It is found that as the deforestation rate coefficient exceeds a critical value, loss of stability of the interior equilibrium state occurs and sustained oscillations arise about interior equilibrium through Hopf-bifurcation. The stability and direction of bifurcating periodic solutions are discussed using center manifold theory. Further, it is observed that the amplitude of periodic oscillation dampens as the maximum efficacy of forest management programs to reduce the deforestation rate increases and above a critical value of the maximum efficacy of forest management programs, the periodic oscillations die out and the interior equilibrium becomes stable. The strategies for the optimal control of \(CO _{2}\) concentration while minimizing the execution cost of forest management programs are also investigated using the optimal control theory. The theoretical results are demonstrated via numerical simulations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
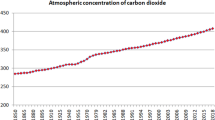
The past few decades witnessed a rapid rise in atmospheric carbon dioxide (\(CO _{2}\)) concentrations. The excessive increase in carbon dioxide levels has negative impacts on air quality and human health, and is the prime driver of the problem of global warming. Global warming has many adverse effects on the humans and ecosystem, like melting of ice covers and permafrost, storm surges, flood and erosion in the coastal regions, increase in the chances of extinction of endangered animal and plant species, change in rainfall patterns affecting global food and water supply, increase in vector-borne, food-borne and water-borne diseases, increase in heat-related illness, etc. (McMichael et al. 2006; Casper 2010; Shuman 2010; Yang et al. 2021). The carbon dioxide concentration has reached a level of 418 ppm in the year 2022, which is approximately 49% above the level of 280 ppm that existed at the beginning of the industrial revolution (Prentice et al. 2001; NOAA 2022). Deforestation is one of the largest human-caused sources of \(CO _{2}\) emissions. Since 1990, nearly 420 million ha (hectare) of forests are lost worldwide due to deforestation with an annual rate of 10 million ha per year between 2015-2020 (FAO 2020). Reforestation and afforestation activities are of great importance to compensate for the forest loss caused by deforestation and are adopted by many countries across the globe. The reforestation rate in 2015 was estimated to be 27 million ha with an annual increase of 1.57 % (FAO 2016). To attain the objective of mitigation of increased carbon dioxide levels in the atmosphere, plantation on a large scale is required, however, a number of demographic and economic constraints restrict reforestation on the desired scale (Jackson and Baker 2010). In this scenario, countries are adopting forest management policies that increase forest biomass and reduce deforestation rates, thus aiding in reducing the atmospheric burden of \(CO _{2}\). Costa Rica is the first tropical country that has successfully reversed the deforestation and restored forest cover from 24.4% in 1985 to more than 50% by 2011 using the forest management policies (Tafoya et al. 2020).
Worldwide concern about the degradation of forests is leading to new approaches to forest management. Use of the genetically engineered plants having elongated roots, high growth rate, and biomass productivity is one of the emerging techniques to increase the forest biomass per unit forest area and reduce the atmospheric level of carbon dioxide (Harfouche et al. 2011; Ye et al. 2011; Dubouzet et al. 2013; Chang et al. 2018; Verma et al. 2021). In Brazil, the genetically modified eucalyptus trees are found to grow faster and absorb more carbon dioxide, resulting in larger forest biomass productivity per unit area (Ledford 2014). Agroforestry is another practice widely used nowadays to increase productivity and forest cover. Agroforestry refers to a land-use system that integrates trees in farms and agriculture landscapes to enhance productivity and ecosystem sustainability (Zomer et al. 2016). In many countries, agroforestry is considered to be an important part of the overall regional strategy for forest management and climate change mitigation (Van Noordwijk et al. 2003). The average carbon sequestration potential of Indian agroforestry is estimated to be 25 tonnes of carbon per hectare (Basu 2014). The rural population relies very much on the forests for their livelihood, fuel for cooking and heating purposes, etc. The dependence of the population on forestry resources is often a result of a lack of availability of alternatives to the forest resources or the inability of the population to afford them (Badola et al. 2012). The programs that provide economic incentives to the rural people for their livelihood, like fuel efficient stoves and biogas, fiber, tin, subsidy on those products which are the alternate of forest resources, etc., are fruitful to reduce the deforestation rates (Misra and Lata 2015a). In recent years, many climate change mitigation frameworks are developed that focus on the reduction of carbon dioxide emissions from deforestation and forest degradation. One of the main international policies in this regard is developed by UNFCCC (United Nations Framework Convention on Climate Change) Conference of the Parties, which is known as REDD+ (reducing emissions from deforestation and degradation plus) mechanism. REDD+ mechanism is aimed to guide and provide economic support to the activities in the forest sector which reduces the deforestation rate and increases the existing forest carbon stocks using sustainable forest management (UNFCCC 2010; Bottazzi et al. 2013). It is found that a national-level REDD+ program can significantly reduce the forest cover loss and associated carbon emissions. A study has shown that the Norway-Guyana REDD+ program caused a decrease in the tree cover loss by 35% during the period 2010 to 2015 and avoided 12.8 million tons of \(CO _{2}\) emissions (Roopsind et al. 2019). Thus, the forest management activities contribute significantly in reduction of deforestation rate and enhancement of forest biomass.
In recent years, several mathematical models are proposed to explore the effect of various factors, including human population and forest biomass, on the dynamics of \(CO _{2}\) gas in the atmosphere (Tennakone 1990; Lonngren and Bai 2008; Caetano et al. 2011; Misra and Verma 2013, 2015; Misra et al. 2015; Shukla et al. 2015; Verma and Misra 2018; Devi and Gupta 2018, 2020; Devi and Mishra 2020; Verma et al. 2021; Verma and Verma 2021; Misra and Jha 2021). In particular, Tennakone (1990) has proposed a simple mathematical model to examine the stability conditions of the biomass and atmospheric \(CO _{2}\) equilibrium. It is found that for a critically high deforestation rate, the biomass-carbon dioxide equilibrium may become unstable accompanied by an increase in \(CO _{2}\) concentration. Misra and Verma (2013) have proposed a three-dimensional model to assess the interplay between the human population, forest biomass and atmospheric \(CO _{2}\). In this study, it is found that the deforestation rate has destabilizing effect over system’s dynamics. Further, Misra et al. (2015) have proposed a mathematical model to examine the effect of delay involved in applying reforestation efforts on the control of \(CO _{2}\) levels in the atmosphere. Devi et al. (2018) presented a study of the effect of the varying capability of plants to uptake \(CO _{2}\) on atmospheric \(CO _{2}\) levels. Misra and Jha (2021) have developed a mathematical framework to study the effect of population pressure on the dynamics of carbon dioxide gas. They have found that an increase in the reduction rate coefficient of forest biomass due to population pressure leads to an increase in the equilibrium \(CO _{2}\) level. Many studies presented nonlinear mathematical models for the conservation of forest biomass (Shukla and Dubey 1997; Dubey et al. 2009; Misra and Lata 2015a, b; Lata and Misra 2017). These studies show that the forest biomass can be conserved using technological efforts like plantation of genetically engineered plants and providing economic incentives to the people which ultimately reduce the deforestation rate. However, these studies do not explore the effect of forest conservation on the \(CO _{2}\) levels. In the present study, we have formulated a mathematical model to study the impact of forest management programs on atmospheric \(CO _{2}\) levels. We have assumed that the forest management programs focus to reduce the deforestation rate via providing economic incentives and motivating people to switch to alternate resources. Apart from reducing the deforestation rates, these programs also focus to increase the forest biomass through afforestation, plantation of genetically modified trees, etc.
2 The model
Consider a geographical region in which forests are depleting due to an increase in the human population. The forest management programs are executed to reduce the deforestation rate and increase the forest biomass. Forest biomass is one of the prime sinks of carbon dioxide, so the depletion and conservation of forest biomass will affect the dynamics of atmospheric carbon dioxide. To model this scenario, we have considered four dynamic variables, namely the atmospheric \(CO _{2}\) concentration (C(t)), human population (N(t)), forest biomass (B(t)), and a measure of forest management programs (P(t)). The forest management programs can be measured in terms of their execution cost. The natural emission rate of carbon dioxide is assumed to be a constant while the anthropogenic emission rate is considered to be proportional to the human population (Onozaki 2009; Jorgenson and Clark 2013). The removal rate of \(CO _{2}\) by forest biomass during photosynthesis is assumed to depend on both the concentration of carbon dioxide and the density of forest biomass. It is also assumed that the \(CO _{2}\) removal rate by other natural sinks, like ocean, etc., is proportional to atmospheric \(CO _{2}\) concentration (Nikol’kii 2010). Under the above assumptions, the dynamics of \(CO _{2}\) is given as
In the above equation \({\dot{C}}\) denotes time derivative of C(t), Q is the natural emission rate of \(CO _{2}\), \(\lambda \) is the anthropogenic emission rate coefficient of \(CO _2\), \(\lambda _1\) and \(\alpha \) are the uptake rate coefficients of \(CO _{2}\) from the atmosphere by forest biomass and natural sinks other than forest biomass, respectively.
The population and forest biomass are assumed to grow logistically. The population cut down forests for their use which supports the population growth. Thus, an increase in population is assumed to reduce forest biomass while an increase in biomass boosts population growth. Further, it is considered that the implementation of forest management programs causes a reduction in deforestation rate and an increase in forest biomass. The reduction in deforestation rate due to forest management programs can not increase indefinitely with the increase in management programs so it is taken as a saturating function of forest management programs. Similarly, the forest biomass can not be increased indefinitely with an increase in management programs, therefore we have taken that growth rate of forest biomass due to the application of management programs as a saturating function of management programs. The Earth’s surface temperature will increase due to the increase in radiative forcing created by enhanced atmospheric \(CO _{2}\) concentration (IPCC 2014). The climate changes caused by enhanced surface temperature have many adverse impacts on the population (Ichikawa 2004; McMichael et al. 2006; Kurane 2010; Misra 2014); therefore, it is considered that population declines due to elevated \(CO _{2}\) concentration. Under these assumptions, the following differential equations capture the dynamics of population and forest biomass:
In the above differential equations, s and L are the intrinsic growth rate and carrying capacity of the population, respectively. The constant \(\xi \) is the growth rate coefficient of the population due to forest biomass and \(\theta \) is the declination rate coefficient of population due to an increase in \(CO _{2}\) level. The constants u and M are the intrinsic growth rate and carrying capacity of forest biomass, respectively. \(\phi \) is the deforestation rate coefficient whereas \(\phi _1\) and \(\eta _1\) denote the maximum efficiencies of forest management programs to reduce the deforestation rate and to increase the forest biomass, respectively. The constant \(k_1\) is a half-saturation constant representing the level of forest management programs at which half of the maximum reduction in deforestation rate due to forest management programs is reached. The constant \(l_1\) is a half-saturation constant representing the level of forest management programs at which half of the maximum increase in growth rate of forest biomass due to forest management programs is reached.
We assumed that forest management programs are implemented at a rate proportional to the difference of current forest biomass density from its carrying capacity. Some of the forest management programs will diminish due to their ineffectiveness or some economical barriers. Let \(\nu \) and \(\nu _0\) denote the implementation and declination rate coefficients of forest management programs, respectively, then the dynamics of forest management programs is given as
Thus, the following model describes the dynamics of the problem:
where \(C(0)=C_0>0, N(0)=N_0\ge 0, B(0)=B_0\ge 0 \text { and } P(0)=P_0\ge 0.\) All the parameters of system (5) are positive constants.
2.1 Region of attraction
The region of attraction for all solution of system (5) initiating in positive orthant is given by set
where \(C_m=(Q+\lambda N_m)/\alpha , N_m=L+(\xi LM/s) \text { and } P_m=\nu M/\nu _0\).
3 Mathematical analysis of system(5)
To analyze the qualitative behavior of the dynamical system (5), we employ the stability theory of differential equations. We find the equilibrium points and check the stability behavior of these equilibrium points to access the behavior of the system in the long term.
3.1 Equilibrium analysis
System (5) has four nonnegative equilibria, which are listed below:
-
1.
\(S_1\left( \frac{Q}{\alpha },0,0,\frac{\nu M}{\nu _0}\right) \) always exists.
-
2.
\(S_2\left( \frac{Q}{\alpha +\lambda _1 M},0,M,0\right) \) always exists.
-
3.
\(S_3 (C_3,N_3,0,P_3)\) exists, provided the following condition is satisfied:
$$\begin{aligned} s-\frac{\theta Q}{\alpha } > 0, \end{aligned}$$(6)where \(C_3=\frac{s(Q+\lambda L)}{s\alpha +\theta \lambda L},N_3=\frac{L(s\alpha -\theta Q)}{s\alpha +\theta \lambda L}, \ P_3=\frac{\nu M}{\nu _0}.\)
-
4.
\(S^*(C^*,N^*,B^*,P^*)\) exists, provided the following conditions are satisfied :
$$\begin{aligned}&u-\left( \phi -\frac{\phi _1 \nu M}{k_1\nu _0+\nu M}\right) \left( \frac{s\alpha -\theta Q}{s\alpha +\theta \lambda L}\right) L+\frac{\eta _1\nu M}{l_1\nu _0+\nu M}>0, \end{aligned}$$(7)$$\begin{aligned}&s-\frac{\theta Q}{\alpha +\lambda _1 M}+\xi M>0. \end{aligned}$$(8)
The existence of equilibria \(S_1, S_2\) and \(S_3\) is obvious. In the following, the existence of equilibria \(S^*\) is established. The values of components \(C^*, N^*, B^*\) and \(P^*\) may be obtained by solving the following set of algebraic equations:
From equation (12), we have
From equation (9), we have
Using equation (14) in equation (10) , we have
Using equation (13) and equation (15) in equation (11), we obtain the following equation in B:
From equation (16), we may easily note that
-
(i)
$$\begin{aligned} h(0)=u-L\left( \phi -\frac{\phi _1 \nu M}{k_1\nu _0+\nu M}\right) \left( \frac{s\alpha -\theta Q}{s \alpha +\theta \lambda L}\right) +\frac{\eta _1\nu M}{l_1\nu _0+\nu M}, \end{aligned}$$
which is positive under the condition (7).
-
(ii)
$$\begin{aligned} h(M)=-\phi g(M)=-\phi L\left[ \frac{(s+\xi M)(\alpha +\lambda _1 M)-\theta Q}{s(\alpha +\lambda _1 M)+\theta \lambda L}\right] , \end{aligned}$$
which is negative under the condition (8).
-
(iii)
The derivative of h(B) w.r.t. B is given by
$$\begin{aligned}&h'(B)=-\frac{u}{M}-\left( \phi -\frac{\phi _1q(B)}{k_1+q(B)}\right) g'(B) +g(B)\frac{k_1\phi _1q'(B)}{(k_1+q(B))^2} +\frac{l_1\eta _1q'(B)}{(l_1+q(B))^2}\\&\quad <0 \text { for } B \in (0,M), \end{aligned}$$as
$$\begin{aligned} g'(B)=L\left[ \frac{s\xi (\alpha +\lambda _1 B)^2+s\lambda _1\theta Q+\theta \lambda L \xi (\alpha +\lambda _1 B)+\theta \lambda L \lambda _1(s+\xi B)}{(s(\alpha +\lambda _1B)+\theta \lambda L)^2}\right] > 0, \end{aligned}$$and \(q'(B)=-\frac{\nu }{\nu _0}<0.\)
Thus, a unique positive root \(B^*\) of equation (16) lies in the interval (0, M) provided the conditions (7) and (8) hold. Using this value of \(B^*\) in equations (13)-(15), we get the positive values of \(P=P^*, C=C^*\) and \(N=N^*,\) respectively.
3.2 Local stability analysis
The behavior of the trajectories starting in a small neighbourhood of non-negative equilibria \(S_1, \ S_2, \ S_3 \text { and } S^*\) of system (5) are examined and the following results are obtained:
Theorem 1
-
(i)
The equilibrium \(S_1\) is always unstable.
-
(ii)
The equilibrium \(S_2\) is unstable whenever \(S^*\) exists.
-
(iii)
The equilibrium \(S_3\) is unstable whenever \(S^*\) exists.
-
(iv)
The equilibrium \(S^*\) is locally asymptotically stable iff the following condition holds
where \(D_i(i=1,2,3,4)\) are defined in the proof.
Proof
The Jacobian matrix \({\hat{J}}\) for system (5) is given by:
Let \({\hat{J}}_{S_1},\ {\hat{J}}_{S_2}, \ {\hat{J}}_{S_3}\) and \({\hat{J}}_{S^*}\) are the Jacobian matrix \({\hat{J}}\) evaluated at \(S_1, \ S_2, \ S_3\) and \(S^*\), respectively. Then (i) The eigenvalues of \({\hat{J}}_{S_1}\) are \(-\alpha , s-\frac{\theta Q}{\alpha }, u+\frac{\eta _1\nu M}{l_1\nu _0+\nu M}\) and \(-\nu _0.\) Since one eigenvalue is always positive; therefore, \(S_1\) is always unstable.
(ii) Two eigenvalues of \({\hat{J}}_{S_2}\) are \(-(\alpha +\lambda _1 M), \left( s+\xi M-\frac{\theta Q}{\alpha +\lambda _1 M}\right) \) and the other two eigenvalues are either negative or with negative real part. We note that one of the eigenvalue of \(\hat{J}_{S_2}\) is \(\left( s+\xi M-\frac{\theta Q}{\alpha +\lambda _1 M}\right) \), which is always positive if the condition (8) holds. Thus, \(S_2\) is unstable whenever \(S^*\) exists.
(iii) From \({\hat{J}}_{S_3}\), we find that two of its eigenvalues are \(u-\left( \phi -\frac{\phi _1P_3}{k_1+P_3}\right) N_3+\frac{\eta _1 P_3}{l_1+P_3}\) and \(-\nu _0\) and the other two eigenvalues are roots of equation
which are either negative or with negative real part. Further \(u-\left( \phi -\frac{\phi _1 P_3}{k_1+P_3}\right) N_3+\frac{\eta _1 P_3}{l_1+P_3}\) is positive if the condition (7) holds. Thus \(S_3\) is unstable whenever \(S^*\) exists.
(iv) The characteristic equation for \({\hat{J}}_{S^*}\) is given by
where
Here, it can be easily noted that all \({D_i}'s (i=1,2,3,4)\) are positive. Using Routh–Hurwitz criterion, it is inferred that all the roots of equation (18) will lie in negative half of plane iff condition (17) is satisfied. \(\square \)
3.3 Global stability analysis
Theorem 2
The equilibrium \(S^*\), if exists, is globally asymptotically stable in \(\Gamma \) provided the following conditions are satisfied:
Proof
To prove the theorem, we define a positive definite function:
where \(m_1, m_2\) and \(m_3\) are positive constants to be chosen appropriately.
The time derivative of V along the solution of system (5) is given as
Choosing \(m_1=\frac{\lambda }{\theta }\) and \(m_2=\frac{\xi }{\left( \phi -\frac{\phi _1P^*}{k_1+P^*}\right) }m_1=\frac{\xi \lambda }{\theta \left( \phi -\frac{\phi _1P^*}{k_1+P^*}\right) },\) we get
Thus, dV/dt is negative definite inside \(\Gamma \) if following inequalities hold:
From above inequalities (24)–(26), we can choose \(m_3>0\) provided condition (20) holds. Thus dV/dt is negative definite in \(\Gamma \) provided conditions (19) and (20) are satisfied. Hence the proof. \(\square \)
3.4 Hopf-bifurcation analysis
In this section, we examine the criterion under which the system (5) undergoes Hopf-bifurcation at interior equilibrium \(S^*(C^*,N^*,B^*,P^*)\) by taking \(\phi \) as bifurcation parameter.
Theorem 3
The model system (5) undergoes Hopf-bifurcation about the interior equilibrium \(S^*\) iff there exists \(\phi =\phi _c\) such that
Proof
The characteristic equation (18) can be written as
Let at \(\phi =\phi _c,\)
Then, at \(\phi =\phi _c,\) the characteristic equation can be written as
Above equation has four roots, say \(\psi _i \ (i=1,2,3,4),\) with a pair of purely imaginary roots \(\psi _{1,2}=\pm i\omega _0\) where \(\omega _0=(D_3/D_1)^{1/2}\).
For existence of Hopf-bifurcation, the root other than \(\pm i\omega _0\)(i.e., \(\psi _3\) and \(\psi _4\)) should have negative real parts. To identify the nature of remaining two roots, we have
If \(\psi _3\) and \(\psi _4\) are complex conjugate, then from equation (30), we have \(2 \Re (\psi _3)=-D_1\) i.e., \(\psi _3\) and \(\psi _4\) have negative real parts. If \(\psi _3\) and \(\psi _4\) are real roots, then equations (30) and (33) yield that \(\psi _3\) and \(\psi _4\) are negative. Thus the roots \(\psi _3\) and \(\psi _4\) are either negative or with negative real part. Now, we will find out the transversality condition under which Hopf-bifurcation occurs at \(S^*\). Let at any point \(\phi \in (\phi _c -\epsilon , \phi _c+\epsilon ),\ \psi _{1,2}=\kappa (\phi )\pm i\rho (\phi ).\) Substituting this in equation (28), we get
and
As \(\rho (\phi )\ne 0\), from equation (35), we get
Substituting this in equation (34) and differentiating with respect to \(\phi \) and using the fact that \(\kappa (\phi _c)=0,\) we have
if
The inequality (36) gives the transversality condition. \(\square \)
3.5 Stability and direction of Hopf-bifurcation
We shift the origin to \(S^*\) by applying the transformation
on the model system (5) and obtain the following system
where
and
where, \(d_1=\left( \phi -\frac{\phi _1P^*}{k_1+P^*}\right) , \ d_2=\frac{\phi _1k_1B^*}{(k_1+P^*)^2}, \ d_3= \frac{\eta _1l_1}{(l_1+P^*)^2}+\frac{\phi _1k_1N^*}{(k_1+P^*)^2}, d_4=\frac{\phi _1k_1N^*B^*}{(k_1+P^*)^3}+\frac{\eta _1 B^*}{(l_1+P^*)^2}-\frac{\eta _1P^*B^*}{(l_1+P^*)^3}.\)
The eigenvectors \(v_1,v_2\) and \(v_3\) of Jacobian matrix \({\hat{J}}_{S^*}\) corresponding the eigenvalues \(i\omega _0, \psi _3\) and \(\psi _4,\) respectively, at \(\phi =\phi _c\) are given as
where
Define
Matrix A is a nonsingular matrix such that
Let the inverse of matrix A is given by
Let \(Z=AY\) or \(Y=A^{-1}Z,\) where \(Y=(y_1,y_2,y_3,y_4)^T.\) Under this linear transformation system (37) becomes
where, \({\hat{F}}(Y)=A^{-1}G(AY),\)
This can be written as
where \({\hat{F}}=(F_1,F_2,F_3,F_4)^T,\)
Furthermore, we can calculate \(g_{11}, \ g_{02}, \ g_{20}, \ G_{21}, \ G_{110}^1, \ G_{110}^2, \ G_{101}^1, \ G_{101}^2, \ \omega _{11}^1,\ \omega _{11}^2, \omega _{20}^1, \ \omega _{20}^2 \) following the procedure given in Hassard et al. (1981).
Now, we have
where \(\gamma ^{'}(0)=\frac{d}{d\phi }(\Re \psi _1(\phi ))|_{\phi =\phi _c}\) and \(\omega ^{'}(0)=\frac{d}{d\phi }(\Im \psi _1(\phi ))|_{\phi =\phi _c}.\)
Theorem 4
The Hopf-bifurcation occurring at \(\phi =\phi _c\) about \(S^*\) is supercritical or subcritical according as \(\mu _2>0\) or \(\mu _2<0\) and the bifurcating periodic solutions exist for \(\phi >\phi _c\) or \(\phi <\phi _c\). The periodic orbits are stable or unstable according to \(\beta _2<0\) or \(\beta _2>0\) and the period of orbits increases or decreases depending on \(\tau _2>0\) or \(\tau _2<0\).
4 The optimal control problem
The execution cost of forest management programs restricts their implementation on large scale. Thus, the policymakers sought management policies that reduce the \(CO _2\) emission at minimum implementation cost. The optimal control theory can be effectively used to design the cost effective forest management policies. For this purpose, we modify the model system (5) by taking a Lebesgue measurable function v(t) as the increased execution rate of forest management programs, on some finite time interval \([0,t_f]\). With this assumption, the model system (5) can be rewritten as
where
Our problem is to minimize the cost functional
subject to the system (48) with initial conditions (49). In the objective functional, the coefficients \(w_1\) and \(w_2\) are the weight parameters balancing the effect of both the terms in the objective functional. The first term in the cost functional represents the cost for carbon dioxide mitigation, and the second term represents the cost associated with the implementation of forest management programs. The quadratic expression of control shows the nonlinear cost arising at a high implementation level. We seek optimal control \(v^*(t)\) such that
where \(U = \left\{ v(t) : v(t) \text { is measurable }, 0 \le v(t) \le v_\mathrm{max} , t \in [0, t_f ]\right\} \) is the control set.
Theorem 5
There exists an optimal control \(v^*\) such that \(J (v^*(t)) = \min _{v(t) \in U} J (v(t))\), subject to system (48) with initial conditions (49).
Proof
The boundedness of the solutions of the system (48) assures the existence of solution to the control system using the result in Lukes (1982). Thus, it can be concluded that the set of controls and corresponding state variables is non-empty. It can be seen that the set U is closed. Further, U is convex and the integrand \(w_1C(t)+w_2 v^2(t)\) of the cost functional (50) is convex on U. Using the boundedness of solutions, it can be deduced that the right-hand side of system (48) is bounded by a linear function of control and state variables. In addition, the integrand of functional (50) satisfies the following inequality:
for some \(c_1, c_2 >0\) and \(\rho >1\). The above arguments prove the existence of optimal control \(v^*\) following the results from Fleming and Rishel (1975). \(\square \)
The optimal control is characterized using Pontryagin’s maximum principle. The Hamiltonian H is given by
where \(\nu _i(i=1,2,3,4)\) are the adjoint variables. The adjoint variables satisfy the following equations:
The transversality conditions are
With the help of the optimality condition, i.e., \(\frac{\partial H}{\partial v}=0\) at \(v=v^*\), we get \(v^*=-\frac{\nu _4(M-B)}{2w_2}.\) Taking into account the bound constraints for control, we get
Thus, the characterization of optimal control \(v^*\), which minimizes J subjected to the state system (48) over the set U, is given by
The optimality system comprises of the state system (48), the adjoint system (54) with optimal control (56), and conditions (49) and (55).
5 Numerical simulation
To depict the effect of deforestation and forest management programs on the dynamics of atmospheric carbon dioxide, the numerical simulations are performed for the set of parameter values given in Table 1. For these parameter values, the eigenvalues of \({\hat{J}}_{S^*}\) are \(-0.02613526 \pm 0.01840753 \ i\) and \(-0.08977696 \pm 0.01470386 \ i\), which lie in the left half of the complex plane, inferring the local asymptotic stability of \(S^*\). Figure 1 depicts the global stability of \(S^*\) in \(C-N-B\) and \(C-B-P\) spaces. We may see that the solution trajectories of system (5) with different initial starts are approaching the equilibrium values. Figure 2 shows the effect of changes in the deforestation rate \(\phi \) on the time evolutions of \(CO _{2}\) and forest biomass. It can be seen that as the deforestation rate \(\phi \) increases, the \(CO _2\) level increases and that of forest biomass decreases. Figure 3 depicts that an increase in the implementation rate of forest management programs causes an increase in the equilibrium level of forest biomass and a decrease in that of \(CO _{2}\).

Global stability of \(S^*\) in \(C-N-B\) space and \(C-B-P\) space

Time evolution of atmospheric carbon dioxide and forest biomass for different values of \(\phi .\) The other parameter values are same as in Table 1

Time evolution of atmospheric carbon dioxide and forest biomass for different values of \(\nu .\) The other parameter values are same as in Table 1

Contour plots of equilibrium levels of a atmospheric carbon dioxide and b forest biomass as a function of \(\phi _1\) and \(k_1\)

Contour plots of equilibrium levels of a atmospheric carbon dioxide and b forest biomass as a function of \(\eta _1\) and \(l_1\)

Time evolution of atmospheric carbon dioxide and forest biomass for different values of \(\phi _1\) and \(\eta _1.\) The other parameter values are same as in Table 1

Time evolution of \(C,\ N,\ B\) and P for \(\phi \) = 0.0003. The other parameter values are same as in Table 1

Time evolution of \(C,\ N,\ B\) and P for \(\phi \) = 0.0008. The other parameter values are same as in Table 1

Time evolution of \(C,\ N,\ B\) and P for \(\phi \)=0.0008 and \(\phi _1\) = 0.0003. The other parameter values are same as in Table 1
To show the effect of changes in the maximum efficacy of forest management programs to reduce the deforestation rate, i.e., \(\phi _1\) and half-saturation constant \(k_1\) on equilibrium levels of C(t) and B(t), we have plotted the contour plots of equilibrium levels of \(CO _2\) and forest biomass as a function of \(\phi _1\) and \(k_1\) in Fig. 4. From this figure, we observe that the equilibrium level of \(CO _2\) declines with an increase in the value of \(\phi _1\) and a decrease in the value of \(k_1\). The equilibrium level of forest biomass increases with an increase in the value of \(\phi _1\) and a decrease in the value of \(k_1\). It should be noted that the low values of \(k_1\) represent those forest management programs where reduction in deforestation rate caused by forest management programs increases more rapidly at low values of P(t). Figure 4 clearly shows that for low values of \(k_1\), an increase in maximum efficiency of management programs to reduce deforestation rate \(\phi _1\) causes more increase in forest biomass and consequently more decline in \(CO _2\) level. Figure 5 depicts the contour plots of equilibrium levels of \(CO _2\) and forest biomass as a function of the maximum efficiency of forest management programs to increase forest biomass \(\eta _1\) and half saturation constant \(l_1\). From this figure, we can observe that the equilibrium level of \(CO _2\) declines with an increase in the value of \(\eta _1\) and a decrease in the value of \(l_1\). The equilibrium level of forest biomass increases with an increase in the value of \(\eta _1\) and a decrease in the value of \(l_1\). It should be noted that the low values of \(l_1\) represent those forest management programs where increase in forest biomass caused by forest management programs increases more rapidly at low values of P(t). Figure 5 clearly shows that for low values of \(l_1\), an increase in maximum efficiency of forest management programs to increase the forest biomass \(\eta _1\) causes more increase in forest biomass and consequently more decline in \(CO _2\) level. Figure 6 presents a comparison between the time variations in atmospheric \(CO _2\) and forest biomass when effect of forest management programs is not considered (\(\phi _1=0, \ \eta _1=0\)), when forest management programs contain only those strategies which increase forest biomass (\(\phi _1=0, \ \eta _1=0.01\)), when forest management programs contain only those strategies which focus on reducing deforestation rate (\(\phi _1=0.00007, \ \eta _1=0\)), and when forest management programs comprise of both kinds of strategies (\(\phi _1=0.00007, \ \eta _1=0.01\)). This figure shows that in absence of forest management programs, the equilibrium level of \(CO _2\) settles to a high level and forest biomass settles to low level in comparison to the cases when forest management programs are applied. The reduction bring in the equilibrium \(CO _2\) level by forest management programs is least when management programs contain only those strategies which increase forest biomass (\(\phi _1=0, \ \eta _1=0.01\)) and highest when it comprise of both kinds of strategies (\(\phi _1=0.00007, \ \eta _1=0.01\)).
The dynamics of the system (5) about interior equilibrium \(S^*\) changes with an increase in the deforestation rate parameter ‘\(\phi \)’. For small values of \(\phi \), \(S^*\) is stable while an increase in \(\phi \) above a critical value destabilizes the equilibrium \(S^*\) and periodic solutions arise via Hopf-bifurcation. The critical value of \(\phi \) at which stability loss occurs via Hopf-bifurcation has been calculated for the set of parameter values given in Table 1 and is found to be \(\phi _c=0.0007067\). It is found that for \(\phi \in [0, \phi _c)\), all the eigenvalues of the Jacobian \({\hat{J}}_{S^*}\) lies in the left half of the complex plane showing that the equilibrium \(S^*\) is stable while for \(\phi > \phi _c\), \(S^*\) loses stability and becomes unstable. Further, the computations of \(\mu _2\), \(\tau _2\) and \(\beta _2\) show that \(\mu _2>0\), \(\tau _2>0\) and \(\beta _2<0\) at \(\phi =\phi _c\). Using theorem 4, this can be inferred that supercritical Hopf-bifurcation occurs at \(\phi =\phi _c\) yielding a family of stable periodic solutions with increasing time period. Figures 7 and 8 show the time variations of atmospheric \(CO _2\) concentration C(t), human population N(t), forest biomass B(t) and forest management programs P(t) for \(\phi =0.0003(<\phi _c)\) and \(\phi =0.0008(>\phi _c)\), respectively. These diagrams reveal that for \(\phi \in [0, \phi _c)\), all the variables settle down to their equilibrium values but for \(\phi >\phi _c\), all the variables show oscillatory behaviour. This shows that an increase in deforestation rate above the threshold value \(\phi _c\) may destabilize the interior equilibrium and sustained oscillation may arise. These oscillations may dampen gradually and eventually die out with an increase in the maximum efficiency of forest management programs to reduce the deforestation rate, i.e. \(\phi _1\). To show this effect of increase in \(\phi _1\) on system dynamics, we have plotted the time variations of C(t), N(t), B(t) and P(t) for \(\phi =0.0008\) and \(\phi _1=0.0003\) in Fig. 9. From this figure, it can be seen that all variables attain the equilibrium levels for \(\phi =0.0008\) and \(\phi _1=0.0003\).

Bifurcation diagrams of atmospheric carbon dioxide, human population, forest biomass and forest management programs with respect to \(\phi \). The other parameters take same values as in Table 1

Bifurcation diagrams of atmospheric carbon dioxide, human population, forest biomass and forest management programs with respect to \(\phi _1\) at \(\phi =0.0008\). The other parameters take same values as in Table 1

Bifurcation diagrams of atmospheric carbon dioxide, human population, forest biomass and forest management programs with respect to \(\eta _1\) at \(\phi =0.0008\). The other parameters take same values as in Table 1
To get a more clear picture, we have drawn a bifurcation diagram of the system (5) by taking \(\phi \) as a bifurcation parameter in Fig. 10. This figure shows that for small values of \(\phi \), all the variables approach their equilibrium values. However, as the deforestation rate \(\phi \) crosses the Hopf-bifurcation threshold \(\phi _c\), interior equilibrium losses stability and sustained oscillations of increasing amplitude are observed. Further, for \(\phi =0.0008\), if we increase the value of \(\phi _1\), then the amplitude of the period of oscillation decreases, and beyond a critical value of \(\phi _1\), the periodic oscillation dies out and the system gets stabilized (see Fig. 11). The same dynamic behavior is observed when the value of \(\eta _1\) is increased. From figure 12, it can be observed that an increase in the maximum efficiency of forest management programs to increase the forest biomass (\(\eta _1\)) dampens the periodic oscillations and after a critical value of \(\eta _1\) the periodic oscillation dies out and the solution trajectories of the system (5) settle to a positive equilibrium state. This shows that the implementation of forest management programs not only decreases the atmospheric \(CO _2\) level but can enhance the stability of the positive equilibrium state of the system.

Future concentration of \(CO _2\) and forest biomass with and without optimal control and optimal profile of control parameter v(t). The other parameter values are same as in Table 1 with \(t_f=100, \ v_{\max }=0.02, \ w_1=1\) and \(w_2=15000\)

The optimal profile of v(t) for different values of a \(v_{\max }\) at \(w_1=1\) and \(w_2=15000\), and b for different values of \(w_1\) and \(w_2\) at \(v_{\max }=0.02\). The other parameters take same value as in Table 1 with \(t_f=100\)

Effect of varying \(\phi _1\), \(\eta _1\), \(l_1\), \(k_1\) and \(v_{\max }\) on cost functional J and the other parameter values are same as in Table 1 with \(t_f=100, \ v_\mathrm{max}=0.02, \ w_1=1\) and \(w_2=15000\)
The optimality system is solved numerically by taking weight factors \(w_1=1\) and \(w_2=15000\), \(v_\mathrm{max}=0.02\), and \(t_f=100\). The atmospheric \(CO _2\) concentration and forest biomass in the absence and presence of optimal control, and the profile of the time -dependent control v(t) is shown in figure 13. This figure shows an increase in forest biomass and a drop in atmospheric \(CO _2\) concentration in the presence of time-dependent control v(t). The optimal profile of v(t) shows that it is optimal to execute the forest management programs at the maximum level for first 67 months and reduce gradually afterward. The optimal profile of the control parameter for different values of \(v_\mathrm{max}\) is depicted in the first plot of figure 14, showing that time span over which the forest management programs are executed at maximum level reduces with an increase in the value of \(v_\mathrm{max}\). The second plot of figure 14 shows that the time span over which the management programs are implemented at a maximum rate also reduces with an increase in \(w_2\) while it increases with an increase in \(w_1\). Thus if the weight of the cost of implementation of management programs is high, the programs are applied at the maximum rate for a lesser period and reduced afterward. The effect of varying some parameters namely, \(\phi _1, \ \eta _1, \ l_1, \ k_1,\) and \(v_{\max }\) on the cost functional J is illustrated in figure 15. This indicates that the cost functional increases with the increase in the half-saturation constants \(k_1\) and \(l_1\) and decreases with the increase in the maximum efficacy of forest management programs to reduce the deforestation rate \(\phi _1\), the maximum efficacy of forest management programs to increase the forest biomass \(\eta _1\) and the maximum implementation rate of control \(v_\mathrm{max}\).
6 Conclusion
The sustainable management of forests can play a key role in climate change mitigation by reducing the atmospheric burden of the prime greenhouse gas, carbon dioxide. In the present work, a mathematical model is presented to analyze the effect of forest management programs over the control of \(CO _2\) levels in the Earth’s atmosphere. The model under consideration is governed by four nonlinear differential equations capturing the dynamic relationship between \(CO _2\) concentration, human population, forest biomass and forest management programs. It is considered that the forest management programs focus on increasing the forest biomass and reducing the deforestation rate. The reduction in the deforestation rate and increase in the growth rate of forest biomass due to forest management programs are taken to be a nonlinear saturating function of forest management programs. A comprehensive stability analysis of the equilibrium states of the proposed model is performed and the conditions for the local and global stability of the equilibria are derived. The model analysis shows that the equilibrium levels of \(CO _2\) can be reduced by increasing the implementation rate and maximum efficiencies of forest management programs to reduce the deforestation rate and increase the forest biomass, respectively. It is shown that the use of forest management policies in which the reduction in the deforestation rate and increase in the growth rate of forest biomass increase more rapidly at low implementation cost are more beneficial in increasing the forest cover and reducing the atmospheric burden of \(CO _2\) gas. Model analysis shows that a sudden change in the dynamics of the system about the positive equilibrium \(S^*\) may occur as the deforestation rate varies. It is found that the loss of stability of positive equilibrium \(S^*\) occurs as the deforestation rate \(\phi \) crosses a critical threshold \(\phi _c\) with generation of sustained oscillations about \(S^*\) via Hopf-bifurcation. The conditions for existence of Hopf-bifurcation with respect to parameter \(\phi \) are derived. It is shown that if the deforestation rate \(\phi <\phi _c\), the positive equilibrium \(S^*\) is stable, and the atmospheric \(CO _2\) and other model variables attain positive equilibrium levels. However, for \(\phi >\phi _c\), all the model variables show oscillator characteristics. The stability and direction of periodic solutions are also analyzed using the center manifold theory.
It is observed that an increase in the maximum efficiencies of the forest management programs to reduce the deforestation rate (\(\phi _1\)) and increase the forest biomass (\(\eta _1\)), respectively, can dampen the oscillations in the atmospheric \(CO _2\) level that have been arisen due to increase in the deforestation rate above the threshold value \(\phi _c\). These periodic oscillations may even die out and positive equilibrium \(S^*\) again becomes stable as \(\phi _1\) or \(\eta _1\) crosses the critical value. This shows that an increase in maximum efficiencies of forest management programs to slow down the deforestation rate and increase the forest biomass not only reduce the equilibrium level of \(CO _2\) but exert a stabilizing effect on the system’s dynamics. Although the forest management programs have the potential to reduce the atmospheric burden to \(CO _2\), but their execution cost is one of the prime barriers to their execution on a large scale. Using optimal control theory, we have derived the management policies that reduce the \(CO _2\) emission at minimum implementation cost. For this purpose, we have taken the increased execution rate of forest management programs as time dependent function v(t) on some finite time interval and derived the optimal profile of v(t) that minimizes the cost functional. It is found that the cost functional decreases with an increase in the maximum efficacy of forest management programs to reduce the deforestation rate (\(\phi _1\)), the maximum efficacy of forest management programs to increase the forest biomass (\(\eta _1\)) and the maximum implementation rate of control (\(v_\mathrm{max}\)). This suggests that the cost effective forest management policies must include those technological options that have high efficiency to increase the forest biomass such as plantation of genetically engineered trees. Apart from this, forest management policies must include programs that cause reduction in deforestation rate, such as education programs that motivate the people to reduce the use of wood based products, providing economic incentives to rural population to switch to fuel efficient stoves and biogas, etc. Overall, the present study provides a mathematical framework to assess the effect of forest management policies over the reduction of \(CO _2\) level while minimizing the implementation cost.
References
Badola R, Barthwal S, Hussain SA (2012) Attitudes of local communities towards conservation of mangrove forests: a case study from the east coast of India. Estuar Coast Shelf Sci 96:188–196
Basu JP (2014) Agroforestry, climate change mitigation and livelihood security in India. N Z J For Sci 44(Suppl 1):S11
Bottazzi P, Cattaneo A, Rocha DC, Rist S (2013) Assessing sustainable forest management under REDD+: a community-based labour perspective. Ecol Econ 93:94–103
Caetano MAL, Gherardi DFM, Yoneyama T (2011) An optimized policy for the reduction of \(CO_2\) emission in the Brazilian Legal Amazon. Ecol Model 222:2835–2840
Casper JK (2010) Greenhouse gases: Worldwide impacts. Facts On File Inc, New York
Chang S, Mahon EL, MacKay HA, Rottmann WH, Strauss SH, Pijut PM, Powell WA, Coffey V, Lu H, Mansfield SD, Jones TJ (2018) Genetic engineering of trees: progress and new horizons. In Vitro Cell Dev Biol Plant 54:341–376
Devi S, Gupta N (2018) Dynamics of carbon dioxide gas \(( CO_2 )\): effects of varying capability of plants to absorb \(CO_2.\) Nat Resour Model 32:e12174
Devi S, Gupta N (2020) Comparative study of the effects of different growths of vegetation biomass on \(CO_2\) in crisp and fuzzy environments. Nat Resour Model 33:e12263
Devi S, Mishra RP (2020) Preservation of the forestry biomass and control of increasing atmospheric \(CO_2\) using concept of reserved forestry biomass. Int J Appl Comput Math 6:17
Dubey B, Sharma S, Sinha P, Shukla JB (2009) Modelling the depletion of forestry resources by population and population pressure augmented industrialization. Appl Math Model 33:3002–3014
Dubouzet JG, Strabala TJ, Wagner A (2013) Potential transgenic routes to increase tree biomass. Plant Sci 212:72–101
FAO (2016) Global forest resources assessment 2015: How are the world’s forests changing?, 2nd edn. Food and Agriculture Organization of the United Nations, Rome, p 54
FAO (2020) Global forest resources assessment 2020-Key findings. Rome. https://doi.org/10.4060/ca8753en
Fleming WH, Rishel RW (1975) Deterministic and stochastic optimal control. Springer, New York
Harfouche A, Meilan R, Altman A (2011) Tree genetic engineering and applications to sustainable forestry and biomass production. Trends Biotechnol 29(1):9–17
Hassard BD, Kazarinoff ND, Wan YH (1981) Theory and application of Hopf-bifurcation. Cambridge University Press, Cambridge, pp 181–219
Ichikawa A (2004) Impacts and risks of global warming. In: Ichikawa A (ed) Global warming-the research challenges. Springer, Berlin, pp 85-114
IPCC (2014) Climate Change 2014: Synthesis report. In: Contribution of Working Groups I, II and III to the fifth Assessment Report of the Intergovernmental Panel on Climate Change [Core Writing Team, Pachauri RK, Meyer LA (eds)]. IPCC, Geneva, Switzerland, 151 pp
Jackson RB, Baker JS (2010) Opportunities and constraints for forest climate mitigation. BioScience 60:698–707
Jorgenson AK, Clark B (2013) The relationship between national-level carbon dioxide emissions and population size: an assessment of regional and temporal variation, 1960–2005. PLoS One 8(2):e57107
Kurane I (2010) The effect of global warming on infectious diseases. Osong Public Health Res Perspect 1(1):4–9
Lata K, Misra AK (2017) Modeling the effect of economic efforts to control population pressure and conserve forestry resources. Nonlinear Anal Model Control 22(4):473–488
Ledford H (2014) Brazil considers transgenic trees: genetically modified eucalyptus could be a global test case. Nature 512:357
Lonngren KE, Bai EW (2008) On the global warming problem due to carbon dioxide. Energy Policy 36:1567–1568
Lukes DL (1982) Differential equations: classical to controlled. In: Mathematics in science and engineering, vol 162. Academic Press, New York
McMichael AJ, Woodruff RE, Hales S (2006) Climate change and human health: present and future risks. Lancet 367:859–869
Misra AK (2014) Climate change and challenges of water and food security. Int J Sustain Built Environ 3(1):153–165
Misra AK, Jha A (2021) Modeling the effect of population pressure on the dynamics of carbon dioxide gas. J Appl Math Comput 67(2):623–640
Misra AK, Lata K (2015a) A mathematical model to achieve sustainable forest management. Int J Model Simul Sci Comput 6(4):1550040
Misra AK, Lata K (2015b) Depletion and conservation of forestry resources: a mathematical Model. Differ Equ Dyn Syst 23(1):25–41
Misra AK, Verma M (2013) A mathematical model to study the dynamics of carbon dioxide gas in the atmosphere. Appl Math Comput 219:8595–8609
Misra AK, Verma M (2015) Impact of environmental education on mitigation of carbon dioxide emissions: a modelling study. Int J Glob Warm 7:466–486
Misra AK, Verma M, Venturino E (2015) Modeling the control of atmospheric carbon dioxide through reforestation: effect of time delay. Model Earth Syst Environ 1:24
Nikol’kii MS (2010) A controlled model of carbon circulation between the atmosphere and the ocean. Comput Math Model 21:414–424
NOAA (2022) Trends in atmospheric carbon dioxide. https://gml.noaa.gov/ccgg/trends/
Onozaki K (2009) Population is a critical factor for global carbon dioxide increase. J Health Sci 55:125–127
Prentice IC, Farquhar GD, Fasham MJR, Goulden ML, Heimann M, Jaramillo VJ, Kheshgi HS, Le Quere C, Scholes RJ, Wallace DWR (2001) The Carbon Cycle and Atmospheric Carbon Dioxide. In: Climate Change: the Scientific Basis. Contributions of Working Group I to the Third Assessment Report of the Intergovernmental Panel on Climate Change. Houghton JT, Ding Y, Griggs DJ, Noguer M, Linden PJVD, Dai X, Maskell K, Johnson CA (eds). Cambridge University Press, Cambridge, UK, pp 185-237
Roopsind A, Sohngen B, Brandt J (2019) Evidence that a national REDD+ program reduces tree cover loss and carbon emissions in a high forest cover, low deforestation country. Proc Natl Acad Sci USA 116:24492–24499
Shukla JB, Dubey B (1997) Modelling the depletion and conservation of forestry resources: effects of population and pollution. J Math Biol 36:71–94
Shukla JB, Chauhan MS, Sundar S, Naresh R (2015) Removal of carbon dioxide from the atmosphere to reduce global warming: a modeling study. Int J Glob Warm 7(2):270–292
Shuman EK (2010) Global climate change and infectious diseases. N Engl J Med 362:1061–1063
Tafoya KA, Brondizio ES, Johnson CE, Beck P, Wallace M, Quiros R, Wasserman MD (2020) Effectiveness of Costa Rica’s conservation portfolio to lower deforestation, protect primates, and increase community participation. Front Environ Sci 8:580724
Tennakone K (1990) Stability of the biomass-carbon dioxide equilibrium in the atmosphere: mathematical model. Appl Math Comput 35:125–130
UNFCCC (2010) Report of the Conference of the Parties on its fifteenth session, held in Copenhagen from 7 to 19 December 2009. Framework Convention on Climate. https://unfccc.int/resource/docs/2009/cop15/eng/11a01.pdf Change
Van Noordwijk M, Roshetko JM, Murniati, Angeles MD, Suyanto, Fay C and Tomich TP (2003) Agroforestry is a Form of Sustainable Forest Management: Lessons from South East Asia. ICRAF Southeast Asia Working Paper No. 2003-2. World Agroforestry Centre -ICRAF, SEA Regional Office, Bogor, Indonesia, p 18
Verma M, Misra AK (2018) Optimal control of anthropogenic carbon dioxide emissions through technological options: a modeling study. Comput Appl Math 37:605–626
Verma M, Verma AK (2021) Effect of plantation of genetically modified trees on the control of atmospheric carbon dioxide: a modeling study. Nat Resour Model 34(2):e12300
Verma M, Verma AK, Misra AK (2021) Mathematical modeling and optimal control of carbon dioxide emissions from energy sector. Environ Dev Sustain 23:13919–13944
Yang J, Zhou M, Ren Z, Li M, Wang B, Liu DL, Ou CQ, Yin P, Sun J, Tong S, Wang H, Zhang C, Wang J, Guo Y, Liu Q (2021) Projecting heat-related excess mortality under climate change scenarios in China. Nat Commun 12:1039
Ye X, Busov V, Zhao N, Meilan R, McDonnell LM, Coleman HD, Mansfield SD, Chen F, Li Y, Cheng ZM (2011) Transgenic populus trees for forest products, bioenergy, and functional genomics. Crit Rev Plant Sci 30:415–434
Zomer RJ, Neufeldt H, Xu J, Ahrends A, Bossio D, Trabucco A, Van Noordwijk M, Wang M (2016) Global tree cover and biomass carbon on agricultural land: the contribution of agroforestry to global and national carbon budgets. Sci Rep 6:29987
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest with regard to this article.
Additional information
Communicated by Valeria Neves Domingos Cavalcanti.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Verma, M., Gautam, C. Optimal mitigation of atmospheric carbon dioxide through forest management programs: a modeling study. Comp. Appl. Math. 41, 320 (2022). https://doi.org/10.1007/s40314-022-02028-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-022-02028-5