
Abstract
The problem of finite-time \(H_{\infty }\) control for uncertain fractional-order neural networks is investigated in this paper. Using finite-time stability theory and the Lyapunov-like function method, we first derive a new condition for problem of finite-time stabilization of the considered fractional-order neural networks via linear matrix inequalities (LMIs). Then a new sufficient stabilization condition is proposed to ensure that the resulting closed-loop system is not only finite-time bounded but also satisfies finite-time \(H_{\infty }\) performance. Three examples with simulations have been given to demonstrate the validity and correctness of the proposed methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent years, fractional-order neural networks (FONNs) have received considerable attention due to its extensive applications in real life (Li 2018). Much interesting works with respect to FONNs have been considered. For example, some sufficient conditions on Lyapunov stability for FONNs with or without time delays were derived via LMIs using Lyapunov functional method (Wu et al. 2016; Zhang et al. 2017a, b, 2018; Yang et al. 2018). With the help of the fractional-order Razumikhin theorem and LMIs, the authors of the work (Chen et al. 2019) presented some delay-dependent criteria for asymptotic stability of a class of delayed fractional-order memristive neural networks. The authors of the work (Chen et al. 2015b) derived sufficient condition for global asymptotic stability of fractional memristor-based neural networks with time-varying delays by employing a comparison theorem for a class of linear fractional-order systems with time delay. Very recently, some interesting results on robust stability analysis have been investigated in Pahnehkolaei et al. (2019a, b) for delayed fractional quaternion-valued leaky integrator echo state neural networks. The problem of finite-time stability or finite-time boundedness for FONNs was investigated in Rakkiyappan et al. (2014), Yang et al. (2015), Chen et al. (2016), Wang et al. (2017), Dinh et al. (2017), Xu and Li (2019) and Rajivganthi et al. (2018). Some delay-independent sufficient conditions on finite-time stability problem for a class of nonlinear fractional-order systems were proposed in Chen et al. (2015a) based on using the technique of inequalities. Using linear matrix inequality approach and finite-time stability theory, the authors in Thuan et al. (2019) solved the problem of finite-time passivity for FONNs. The problem of finite-time guaranteed cost control for FONNs was considered in Thuan et al. (2018). Recently, problem of global nonfragile synchronization in finite time for fractional-order discontinuous neural networks with nonlinear growth activations functions has been studied in Peng et al. (2019) using nonsmooth analysis method combined with Lur’e Postnikov-type Lyapunov functional.
As we known, due to many reasons such as measurement errors, linear approximation, modeling inaccuracies, external noises and so on, disturbances are usually unavoidable in neural network systems. It is significant for scholars to study the disturbance attenuation performance via \(H_{\infty }\) control approach. Some interesting and important results on finite-time \(H_{\infty }\) control for integer order dynamical systems have been shown in recent years (Xiang and Xiao 2011; Xiang et al. 2012; Wang et al. 2015; Song and He 2015; Cheng et al. 2015; Guo et al. 2018; Ban et al. 2018; Lin et al. 2014; Liu and Lin 2015; Xie et al. 2017). The authors (Xiang and Xiao 2011) investigated problem of finite-time \(H_{\infty }\) control for switched nonlinear discrete-time systems. Using the average dwell time approach, problems of finite-time stability analysis and \(H_{\infty }\) stabilization for switched neutral systems were solved in Xiang et al. (2012) via LMIs. The results in Xiang et al. (2012) was improved in Wang et al. (2015) for both stable and unstable subsystems. Using Lyapunov–Krasovskii functional method, some sufficient conditions on finite-time boundedness of Markovian jump systems was shown in Cheng et al. (2015). For neural networks, some important results have been addressed. Using finite-time bounded average dwell time and LMI approaches, finite-time \(H_{\infty }\) control for neutral-type uncertain switched neural networks with mixed time varying delays was investigated in Ali and Saravanan (2016). The authors (Baskar et al. 2018) investigated finite-time \(H_{\infty }\) control problem for neutral Markovian jumping neural networks based on LMI approach. However, all the above results are limited to integer order systems. Noting that the analysis on finite-time stability of FONNs is more complex and difficult than that of integer-order neural networks due to the fact that fractional derivatives are nonlocal and have weakly singular kernels. This is the main reason that there are very few results on finite-time \(H_{\infty }\) control for fractional-order systems. To the best of authors’ knowledge, so far, no result on the finite-time \(H_{\infty }\) control for FONNs with uncertainties has been reported. This is the primary motivation of this work.
Motivated by the above discussions, the problem of finite-time \(H_{\infty }\) control for FONNs with uncertainties is considered. The crucial novelty of this paper is stated as follows:
- (1)
Using the Lyapunov-like function method and an important fractional derivative inequality of quadratic function, we derive a new stabilization criteria in terms of LMIs.
- (2)
Based on the obtained finite-time stabilization result, the finite-time \(H_{\infty }\) control problem is investigated for the concerned FONNs, and the corresponding state feedback controller design is given simultaneously.
- (3)
New results are derived in the form of LMIs. They are less conservative and generalize those proposed in the literature.
The organization of this paper is as follows. In Sect. 2, we summarize some definitions, notations and give auxiliary lemmas which will be used in the proof of the main results in the next section. We present our main results on finite-time stabilization and \(H_{\infty }\) control problems for FONNs in Sect. 3. Three numerical examples are provided in Sect. 4 to illustrate the effectiveness of the proposed method.
Notation The following notations will be used in this paper: \(\mathbb {R}^n\) denotes the n-dimensional linear vector space over the reals with the Euclidean norm \(\Vert .\Vert \) given by \(\Vert x\Vert = \sqrt{x_1^2 + \cdots + x_n^2}\), \( x= (x_1, \ldots , x_n)^{\text {T}} \in \mathbb {R}^n;\)\(\mathbb {R}^{n\times m}\) denotes the space of \(n\times m\) matrices. For a real matrix \(A, \lambda _{\max }(A)\) and \(\lambda _{\min }(A)\) denote the maximal and the minimal eigenvalue of A, respectively. A matrix P is positive definite \((P > 0)\) if \(x^{\text {T}}Px> 0, \forall x \not = 0; P > Q\) means \(P-Q > 0\). The symmetric term in a matrix is denoted by \(*\). Let \(\mathbb {S}_n^{+}\) denote the set of symmetric positive definite matrices in \(\mathbb {R}^{n \times n}\).
2 Problem statement and preliminaries
To describe the model, some useful definitions and properties on Riemann–Liouville fractional integral and Caputo fractional derivative of order \(\alpha > 0\) is recalled.
Definition 1
(Kilbas et al. 2006) The Riemann–Liouville fractional integral operator of order \(\alpha > 0\) of a function f(t) is defined by
where \(\varGamma (.)\) is the gamma function, \(\varGamma (s) = \int \limits _{0}^{\infty }e^{-t}t^{s-1}{\text {d}}t, s > 0\).
Definition 2
(Kilbas et al. 2006) The Caputo fractional-order derivative of order \(\alpha > 0\) for a function f(t) is defined as
where n is a positive integer. In particular, when \(0< \alpha < 1\), we have
The following are some useful properties about fractional-order calculus:
- P1:
(Li and Deng 2007): for any constants \(\lambda _1, \lambda _2\), and two functions f(t), g(t), we have
$$\begin{aligned} {}^C_{0}D_t^{\alpha }\left( \lambda _1 f(t) + \lambda _2 g(t)\right) = \lambda _1\,^C_{0}D_t^{\alpha }f(t) + \lambda _2\,^C_{0}D_t^{\alpha }g(t). \end{aligned}$$- P2:
(Li and Deng 2007): if \(f(t) \in C^{n}([0, +\infty ), \mathbb {R})\) and \(n-1< \alpha < n, (n \ge 1, n \in \mathbb {Z}^{+})\), then
$$\begin{aligned} {}_{0}I_{t}^{\alpha }\left( \,^C_{0}D_t^{\alpha }f(t)\right) = f(t) - \sum \limits _{i=0}^{n-1}\frac{t^i}{i!}f^{(i)}(0). \end{aligned}$$In particular, when \(0< \alpha < 1\), we have
$$\begin{aligned} {}_{0}I_{t}^{\alpha }\left( \,^C_{0}D_t^{\alpha }f(t)\right) = f(t) - f(0). \end{aligned}$$- P3:
(Lemma 2.3, pp. 73 in the work of Kilbas et al. 2006) If f(t) is continuous function, then we have
$$\begin{aligned} {}_{0}I_{t}^{\alpha }\left( \,_{0}I_{t}^{\beta }f(t)\right) = \, _{0}I_{t}^{\beta }\left( \,_{0}I_{t}^{\alpha }f(t)\right) =\, _{0}I_{t}^{\alpha +\beta }(f(t)), \forall t \ge 0. \end{aligned}$$
Consider a class of FONNs with parameter uncertainties described by
where \( 0<\alpha < 1\) is the fractional commensurate order of the system, \( x(t) = \left( x_1(t), \ldots , x_n(t)\right) ^{\text {T}} \in \mathbb {R}^{n}\) is the state vector, \(z(t) \in \mathbb {R}^{p}\) is the output vector, \(\omega (t) \in \mathbb {R}^{q}\) is the disturbance input, \(u(t) \in \mathbb {R}^m\) is the control vector, n is the number of neurals, \(f(x(t)) = \left( f_1(x_1(t)), f_2(x_2(t)), \ldots , f_n(x_n(t))\right) ^{\text {T}} \in \mathbb {R}^n\) denotes the activation function, \(A = {{\,\mathrm{diag}\,}}\{a_1, a_2, \ldots , a_n\} \in \mathbb {R}^{n \times n}\) is a positive diagonal matrix, \(D \in \mathbb {R}^{n \times n}\) is the interconnection weight matrix, \(W \in \mathbb {R}^{n \times q}, B \in \mathbb {R}^{n \times m}, C \in \mathbb {R}^{p \times n}\), are known real matrices, \(x_0\) is the initial condition.
To obtain the main results on finite-time \(H_{\infty }\) control of system (1), the following conditions are needed for further study.
Assumption 1
where \(E_a, E_d, E_w, E_b, H_a, H_d, H_w, H_b\) are known real constant matrices of appropriate dimensions; \(F_a(t), F_d(t), F_w(t), F_b(t)\) are unknown real-time-varying matrices satisfying \(F_a^T(t)F_a(t) \le I, F_d^T(t)F_d(t) \le I, F_w^T(t)F_w(t) \le I, F_b^T(t)F_b(t) \le I, \forall t \ge 0\).
Assumption 2
The activation functions \(f_i(.)\) are continuous, \(f_i(0) = 0 \, (i = 1, \ldots , n)\), and satisfies Lipschitz condition on \(\mathbb {R}\) with Lipschitz constant \(l_i > 0:\)
Especially, when \(\eta _2 = 0\), we have
Assumption 3
The disturbance input \(\omega (t) \in \mathbb {R}^{q}\) is satisfied
For system (1) and a given positive scalar \(\gamma \) , the \(H_{\infty }\) performance measure is
The nominal unforced systems of system (1) can be written as follows:
Definition 3
(Finite-time boundedness Ma et al. 2016) Given positive numbers \(T_f, c_1, c_2 (c_1 < c_2), {\overline{d}}\), and a symmetric positive definite matrix \(R \in \mathbb {R}^{n \times n}\). System (6) with the output \(z(t) = 0\) is robustly finite-time bounded with respect to \((c_1, c_2, T_f, R, {\overline{d}})\) if \(x_0^TRx_0 \le c_1 \Longrightarrow x^T(t)Rx(t) < c_2, \forall t \in [0, T_f]\), for all the disturbance input \(\omega (t) \in \mathbb {R}^{q}\) satisfying Assumption 3.
Definition 4
(Finite-time \(H_{\infty }\) performance Xiang et al. 2012; Lin et al. 2014) System (6) is said to be finite-time \(H_{\infty }\) performance with respect to \((c_1, c_2, T_f, R, {\overline{d}})\) if the following conditions are satisfied:
- (i)
When the input \(z(t) \equiv 0\), system (6) is robustly finite-time bounded with respect to \((c_1, c_2, T_f, R, {\overline{d}})\).
- (ii)
Under the zero initial condition, the following inequality holds
$$\begin{aligned} J = \int _{0}^{T_f}\left( z^T(t)z(t) - \gamma ^2 \omega ^T(t)\omega (t)\right) {\text {d}}t < 0, \end{aligned}$$for all \(\omega (t) \in L^2([0, T_f], \mathbb {R}^q)\).
In this paper, we are interested in designing the state feedback controller \(u(t) = Kx(t)\) such that the following closed-loop system
is finite-time \(H_{\infty }\) performance with respect to \((c_1, c_2, T_f, R, {\overline{d}})\).
Now, we recalled the following auxiliary lemmas which are essential to derive our main results in this paper.
Lemma 1
(Duarte-Mermoud et al. 2015) Let \(x(t) \in \mathbb {R}^n\) be a vector of differentiable function. Then for any time instant \(t \ge t_0\), the following relationship holds:
where \(P \in \mathbb {R}^{n \times n}\) is a symmetric positive definite matrix.
Lemma 2
(Boyd et al. 1994). Given constant matrices X, Y, Z with appropriate dimensions satisfying \(Y = Y^T > 0, X = X^T\), then \(X + Z^TY^{-1}Z < 0\) if and only if
3 Main results
First, we derive a result on finite-time boundedness for the closed-loop system (7). Let us denote
Theorem 1
Assume that Assumptions 1, 2 and 3 are satisfied. Given positive scalars \(c_1, c_2, \overline{d}, T_f\) and \(R \in \mathbb {S}_n^{+}\). The closed-loop system (7) is finite-time bounded with respect to \((c_1, c_2, T_f, R, \overline{d})\) if there exist positive scalars \(\varepsilon , \varepsilon _1, \varepsilon _2\), a matrix \(X \in \mathbb {S}_n^{+}\), a matrix \(Y \in \mathbb {R}^{m \times n}\) such that the following conditions hold:
Moreover, the state feedback controller is given by
Proof
Since X is symmetric positive definite matrix, \(X^{-1}\) is also symmetric positive definite matrix. Consider the candidate Lyapunov function:
Using Lemma 2, we get the \(\alpha \)-order \((0< \alpha < 1)\) Caputo derivative of V(x(t)) along the trajectories of the closed-loop system (7) as follows:
The following estimates are obtained based on using Cauchy matrix inequality and Assumption 1:
From Assumption 2, we have
Submitting inequalities (10) and (11) into (9), we obtain
where
with
Now, pre- and post-multiply both sides \(\varOmega \) by \( \mathscr {X} = {{\,\mathrm{diag}\,}}\{X, I, I\}\) and letting \(K = YX^{-1}\), we have
where
Note that \(\varOmega < 0\) is equivalent to \( \mathscr {X} \varOmega \mathscr {X} < 0\). Using the Schur complement Lemma (Lemma 2), we have \(\mathscr {X} \varOmega \mathscr {X} < 0\) is equivalent to (8a). From (8a) and (12), we have
Integrating with order \(\alpha \) both sides of (14) from 0 to t\((0< t < T_f)\) and using Lemma 1, we have
On the other hand, the following conditions hold:
From (15), (16) and (17), we have
Condition (8b) implies that \(x^T(t)Rx(t) < c_2\). Thus, the closed-loop system (7) with \(z(t) \equiv 0\) is finite-time bounded with respect to \((c_1, c_2, T_f, R, \overline{d})\). \(\square \)
Remark 1
Many results have been reported in the literature for the problem of finite-time stability or finite-time boundedness for FONNs (Yang et al. 2015; Chen et al. 2016; Dinh et al. 2017; Xu and Li 2019). The approaches used in existing works mainly based on Hölder inequality, Bellman–Gronwall inequalities and Laplace transform (Yang et al. 2015; Chen et al. 2016; Wang et al. 2017), differential mean value theorem and contraction mapping principle (Rajivganthi et al. 2018). It should be mentioned here that the above approaches cannot be easily extended to finite-time stabilization problems. Using Lyapunov-like function method, Theorem 1 solves the problem of finite-time stabilization for uncertain fractional-order neural networks in terms of LMIs, which can be effectively solved using existing computationally effective convex algorithms.
To comparing with existing works in the literature, we consider the following linear fractional-order system:
where \(\alpha \in (0, 1)\), \(x(t) \in \mathbb {R}^n\) is the state vector, \(\omega (t) \in \mathbb {R}^{p}\) is the disturbance input, \(u(t) \in \mathbb {R}^m\) is the control, \(x_0\) is the initial condition, \(A \in \mathbb {R}^{n \times n}, W \in \mathbb {R}^{n \times p}, B \in \mathbb {R}^{n \times m}\) are given real constant matrices. The disturbance input vector \(\omega (t)\) satisfies the Assumption 3. Under state feedback controller \(u(t) = Kx(t)\), the closed-loop systems of system (19) is described by
Using the same techniques as in the proof of Theorem 1, we obtain the following corollary.
Corollary 1
Assume that Assumption 3 is satisfied. Given positive scalars \(c_1, c_2, \overline{d}, T_f\) and \(R \in \mathbb {S}_n^{+}\). The closed-loop system (20) is finite-time bounded with respect to \((c_1, c_2, T_f, R, \overline{d})\) if there exist a matrix \(X \in \mathbb {S}_n^{+}\), a matrix \(Y \in \mathbb {R}^{m \times n}\) such that the following conditions hold:
where
Moreover, the state feedback controller is given by
Now, we consider the problem of finite-time \(H_{\infty }\) control for system (1). Let us denote
Theorem 2
Assume that Assumptions 1, 2 and 3 are satisfied. Given positive scalars \(c_1, c_2, \overline{d}, T_f\) and \(R \in \mathbb {S}_n^{+}\). If there exist a matrix \(X \in \mathbb {S}_n^{+}\), a matrix \(Y \in \mathbb {R}^{m \times n}\), positive scalars \(\varepsilon , \varepsilon _1, \varepsilon _2\) such that the following conditions hold:
then the closed-loop system (7) is finite-time bounded with \(H_{\infty }\) performance \(\gamma \) with respect to \((c_1, c_2, T_f, R, \overline{d})\) under state feedback controller is given by
Proof
When \(z(t) \equiv 0\), (22a) and (22b) imply (8a) and (8b), respectively. Therefore, from Theorem 1, the closed-loop system is finite-time bounded with respect to \((c_1, c_2, T_f, R, \overline{d})\). To show the finite-time bounded with \(H_{\infty }\) performance \(\gamma \) of the closed-loop system (7), we choose the Lyapunov function as given in the proof of Theorem 1. Then we obtain the following estimate:
where
Now, pre- and post-multiply both sides \(\varPsi \) by \( \mathscr {X} = {{\,\mathrm{diag}\,}}\{X, I, I\}\) and letting \(K = YX^{-1}\) and using Schur complement Lemma, we have \(\varPsi < 0\) is equivalent to (22a). Hence, we get
Integrating (24) with respect to t from 0 to \(T_f\), we have
Using Properties P2 and P3 on fractional-order calculus, we obtain
On the other hand, we have
Under zero initial condition, we have the following estimate:
Hence, \(\,_{0}I_{T_f}^{1}\,^C_{0}D_{T_f}^{\alpha }V(x(t)) \ge 0, \forall T_f \ge 0\) with zero initial condition. Therefore, we have
Hence, it can be concluded that the closed-loop system (7) is finite-time bounded with \(H_{\infty }\) performance \(\gamma \) with respect to \((c_1, c_2, T_f, R, \overline{d})\). \(\square \)
Remark 2
Based on MATLAB LMI Control Toolbox (Gahinet et al. 1995), we now propose an effective algorithm to solve the \(H_{\infty }\) control problem for system (1).
Algorithm 1
Step 1 Solve LMI (22a) and obtain three positive scalars \(\varepsilon , \varepsilon _1, \varepsilon _2\), a matrix \(X \in \mathbb {S}_{n}^{+}\) and a matrix \(Y \in \mathbb {R}^{m \times n}\).
Step 2 Check condition (22b) in Theorem 2. If they hold, enter Step 3; else return to Step 1.
Step 3 The state feedback gain matrix K can be designed as \(K = YX^{-1}\). The \(H_{\infty }\) control problem is solved.
Remark 3
In recent years, many results have been reported for finite-time \(H_{\infty }\) control problem for integer-order dynamical systems with or without time delays (Xiang and Xiao 2011; Xiang et al. 2012; Wang et al. 2015; Song and He 2015; Cheng et al. 2015; Guo et al. 2018; Ban et al. 2018; Liu and Lin 2015; Xie et al. 2017). However, similar tools have not been developed for fractional-order systems. Since the fact that fractional derivatives are nonlocal and have weakly singular kernels (Chen et al. 2015b, 2019), these approaches could not be extended to FONNs easily. This is the main reason that there are very few results on finite-time \(H_{\infty }\) control for FONNs. Thus, to find out new ways to cope with the problems is very challenging. Using LMI approach and using some auxiliary properties on fractional calculus, we solve the problem of finite-time \(H_{\infty }\) control for Caputo FONNs with uncertainties for the first time. Hence, our results are new and novel.
In the case of system (1) without parameter uncertainties, that is, \(\varDelta A(t) \equiv 0, \varDelta D(t) \equiv 0, \varDelta W(t) \equiv 0, \varDelta B(t) \equiv 0\), the model reduces to
Under state feedback controller \(u(t) = Kx(t)\), the closed-loop systems of system (26) is described by
We can easily get the following result as the special case of Theorem 2.
Corollary 2
Assume that Assumptions 2 and 3 are satisfied. Given positive scalars \(c_1, c_2, \overline{d}, T_f\) and \(R \in \mathbb {S}_n^{+}\). If there exist a matrix \(X \in \mathbb {S}_n^{+}\), a matrix \(Y \in \mathbb {R}^{m \times n}\) and a positive scalar \(\varepsilon \) such that the following conditions hold:
where
then the closed-loop system (27) is finite-time bounded with \(H_{\infty }\) performance \(\gamma \) with respect to \((c_1, c_2, T_f, R, \overline{d})\) under state feedback controller is given by
4 Numerical examples
We provide three numerical examples to demonstrate the effectiveness of the proposed method.
Example 1
Consider the following linear fractional-order system (Example 2 in the work of Ma et al. 2016):
where
\(x(t) = (x_1(t), x_2(t))^T \in \mathbb {R}^2, u(t) = (u_1(t), u_2(t)) \in \mathbb {R}^2, \omega (t) = \sin t \in \mathbb {R}\). The closed-loop system with a state feedback controller \(u(t) = Kx(t)\) of system (29) is described by
To comparing our results with the existing work (Ma et al. 2016), we consider two cases:
Case I: Let us take \(c_1 = 5, T_f = 0.1, R = I, \overline{d} = 1\). By Corollary 1, the closed-loop system (30) is finite-time bounded with respect to \((5, c_2, 0.1, I, 1)\) for any \(c_2 \ge 5.9\) by state feedback controller is given by \(u(t) = \begin{bmatrix} -2.500 &{} -4.9939 \\ 0.7454 &{} -1.6250 \end{bmatrix}x(t)\). Note that in Ma et al. (2016), the minimum value of \(c_2\) is \(c_{2\min } = 15\).
Case II: Let us take \(c_1 = 5, c_2 = 15, R = I, \overline{d} = 1\). By Corollary 1, the closed-loop system (30) is finite-time bounded with respect to \((5, 15, T_f, I, 1)\) for any finite time \(0< T_f < T_{f \max } = 6\) by state feedback controller is given by \(u(t) = \begin{bmatrix} -2.500 &{} -4.9939 \\ 0.7454 &{} -1.6250 \end{bmatrix}x(t)\). Note that in Ma et al. (2016), the maximum value of \(T_f\) is \(T_{f \max } = 0.1\).
Therefore, our results may be wider applications than the results in the work of Ma et al. (2016).
Simulation results:
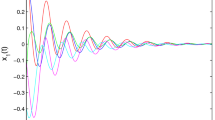
Choosing the initial values \(x(0) = (2, 2)^T \in \mathbb {R}^2, c_1 = 5, c_2 = 5.9, T_f = 0.1, R = I, \overline{d} = 1\). Figure 1 shows the evolution of the states \(x_1(t), x_2(t)\) of the open-loop system. Figure 2 shows the evolution of the states \(x_1(t), x_2(t)\) of the closed-loop system. Figures 3 and 4 show the state trajectory of \(x^T(t)Rx(t)\) of the open-loop system and the closed-loop system, respectively. It is easy to see that the closed-loop system is finite-time bounded with respect to (5, 5.9, 0.1, I, 1).
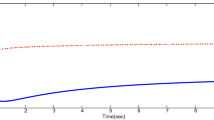
Choosing the initial values \(x(0) = (2, 2)^T \in \mathbb {R}^2, c_1 = 5, c_2 = 15, T_f = 6, R = I, \overline{d} = 1\). Figures 5 and 6 show the state trajectory of \(x^T(t)Rx(t)\) of the open-loop system and the closed-loop system, respectively. It is easy to see that the closed-loop system is finite-time bounded with respect to (5, 15, 6, I, 1).

Trajectories of \(x_1(t), x_2(t)\) of the open-loop system in Example 1

Trajectories of \(x_1(t), x_2(t)\) of the closed-loop system in Example 1

Trajectory \(x^T(t)Rx(t)\) of the open-loop system in Example 1

Trajectory \(x^T(t)Rx(t)\) of the closed-loop system in Example 1

Trajectory \(x^T(t)Rx(t)\) of the open-loop system in Example 1

Trajectory \(x^T(t)Rx(t)\) of the closed-loop system in Example 1
Example 2
Consider the following fractional-order neural networks:
where \(x(t) = (x_1(t), x_2(t))^T \in \mathbb {R}^2, u(t) = (u_1(t), u_2(t)) \in \mathbb {R}^2, z(t) \in \mathbb {R}, \omega (t) = 0.01 \cos t \in \mathbb {R}\) and
The closed-loop system with a state feedback controller \(u(t) = Kx(t)\) of system (31) is described by
The activation function is choose as \(f(x(t)) = (\tanh x_1(t), \tanh x_2(t))^T \in \mathbb {R}^2\). We have the activation function f(x(t)) satisfies Assumption 2 with \(L = {{\,\mathrm{diag}\,}}\{1, 1\}\). Let \(c_1 = 1, c_2 = 2, T_f = 5\) and matrix \(R = I\). Using LMI Control Toolbox in MATLAB (Gahinet et al. 1995), we found that conditions (28a) and (28b) in Corollary 2 are satisfied with \(\varepsilon = 128.2634\) and
According to Corollary 2, the closed-loop system (32) is finite-time bounded with respect to (1, 2, 5, I, 0.0001) with \(H_{\infty }\) disturbance attenuation level \(\gamma = 1.2598 \) under state feedback controller is given by
Simulation results: choosing the initial values \(x(0) = (1, 0.9)^T \in \mathbb {R}^2, c_1 = 1, c_2 = 2, T_f = 5, R = I, \overline{d} = 0.0001\). Figures 7 and 8 show the state trajectory of \(x^T(t)Rx(t)\) of the open-loop system and the closed-loop system, respectively. It is easy to see that the closed-loop system is finite-time bounded with respect to (1, 2, 5, I, 0.0001).

The response of \(x^T(t)Rx(t)\) of the open-loop system in Example 2

The response of \(x^T(t)Rx(t)\) of the closed-loop system in Example 2
Example 3
Consider the uncertain fractional-order neural networks:
where \(x(t) = (x_1(t), x_2(t))^T \in \mathbb {R}^2\) and
The closed-loop system with a state feedback controller \(u(t) = Kx(t)\) of system (33) is described by
The disturbance is chosen as \(\omega (t) = \begin{bmatrix} 0.01 \sin t \\ 0.01 \cos t \end{bmatrix}\). Hence, the disturbance satisfying Assumption 3 with \(\overline{d} = 0.0001\). The activation function is chosen as \(f(x(t)) = (\tanh x_1(t), \tanh x_2(t))^T \in \mathbb {R}^2\). We have the activation function f(x(t)) satisfies Assumption 2 with \(L = {{\,\mathrm{diag}\,}}\{1, 1\}\). Let \(c_1 = 1, c_2 = 1.6, T_f = 10\) and matrix \(R = I\). Given \(\gamma = 1.2391\). Using LMI Control Toolbox in MATLAB (Gahinet et al. 1995), we found that conditions (22a) and (22b) in Theorem 2 are satisfied with \(\varepsilon = 14.1493, \varepsilon _1 = 17.3301, \varepsilon _2 = 14.7246\) and
According to Theorem 2, the closed-loop system (34) is finite-time bounded with respect to (1, 1.6, 10, I, 0.0001) with \(H_{\infty }\) disturbance attenuation level \(\gamma = 1.2391\) under state feedback controller is given by
Simulation results: Choosing the initial values \(x(0) = (1, 0.9)^T \in \mathbb {R}^2, c_1 = 1, c_2 = 1.6, T_f = 10, R = I, \overline{d} = 0.0001\). Figures 9 and 10 show the state trajectory of \(x^T(t)Rx(t)\) of the open-loop system and the closed-loop system, respectively. It is easy to see that the closed-loop system is finite-time bounded with respect to (1, 1.6, 10, I, 0.0001).

The response of \(x^T(t)Rx(t)\) of the open-loop system in Example 3

The response of \(x^T(t)Rx(t)\) of the closed-loop system in Example 3
5 Conclusion
This paper considers finite-time \(H_{\infty }\) control problem for uncertain fractional-order neural networks. We first derive a new condition for finite-time stabilization problem of the considered fractional-order neural networks in terms of LMIs. Next, by extending the concept of \(H_{\infty }\) performance methods for integer-order neural networks to fractional-order neural networks and using Lyapunov-like function, a new sufficient condition is derived that ensure the resulting closed-loop system is not only finite-time bounded but also satisfies finite-time \(H_{\infty }\) performance. Finally, three numerical examples have been shown to illustrate the effectiveness of the obtained results.
References
Ali MS, Saravanan S (2016) Robust finite-time \(H_{\infty }\) control for a class of uncertain switched neural networks of neutral-type with distributed time varying delays. Neurocomputing 177:454–468
Ban J, Kwon W, Won S, Kim S (2018) Robust \(H_{\infty }\) finite-time control for discrete-time polytopic uncertain switched linear systems. Nonlinear Anal Hybrid Syst 29:348–362
Baskar P, Padmanabhan S, Al MSi (2018) Finite-time \(H_{\infty }\) control for a class of Markovian jumping neural networks with distributed time varying delays-LMI approach. Acta Math Sci 38(2):561–579
Boyd S, Ghaoui LE, Feron E, Balakrishnan V (1994) Linear matrix inequalities in system and control theory. SIAM, Philadelphia
Chen L, Pan W, Wu RC, He YG (2015a) New result on finite-time stability of fractional-order nonlinear delayed systems. J Comput Nonlinear Dyn 10(6):064504
Chen L, Wu RC, Cao J, Liu JB (2015b) Stability and synchronization of memristor-based fractional-order delayed neural networks. Neural Netw 71:37–44
Chen L, Liu C, Wu R, He Y, Chai Y (2016) Finite-time stability criteria for a class of fractional-order neural networks with delay. Neural Comput Appl 27(3):549–556
Chen L, Huang T, Tenreiro Machado JA, Lopes AM, Chai Y, Wu RC (2019) Delay-dependent criterion for asymptotic stability of a class of fractional-order memristive neural networks with time-varying delays. Neural Netw 118:289–299
Cheng J, Zhu H, Zhong S, Zhang Y, Li Y (2015) Finite-time \(H_{\infty }\) control for a class of discrete-time Markovian jump systems with partly unknown time-varying transition probabilities subject to average dwell time switching. Int J Syst Sci 46(6):1080–1093
Dinh X, Cao J, Zhao X, Alsaadi FE (2017) Finite-time stability of fractional-order complex-valued neural networks with time delays. Neural Process Lett 46(2):561–580
Duarte-Mermoud MA, Aguila-Camacho N, Gallegos JA, Castro-Linares R (2015) Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun Nonlinear Sci Numer Simul 22:650–659
Gahinet P, Nemirovskii A, Laub AJ, Chilali M (1995) LMI control toolbox for use with MATLAB. The MathWorks, Natick
Guo T, Wu B, Wang YE, Wang X (2018) Delay-dependent robust finite-time \(H_{\infty }\) control for uncertain large delay systems based on a switching method. Circuits Syst Signal Process 37(11):4753–4772
Kilbas A, Srivastava H, Trujillo J (2006) Theory and application of fractional diffrential equations. Elsevier, New York
Li S (2018) LMI stability conditions and stabilization of fractional-order systems with polytopic and two-norm bounded uncertainties for fractional-order \(\alpha \): the \( 1 < \alpha < 2\) case. Comput Appl Math 37(4):5000–5012
Li C, Deng W (2007) Remarks on fractional derivatives. Appl Math Comput 187(2):777–784
Lin X, Du H, Li S (2014) Finite-time boundedness and \(L_2-\)gain analysis for switched delay systems with norm-bounded disturbance. Appl Math Comput 217:5982–5993
Liu H, Lin X (2015) Finite-time \(H_{\infty }\) control for a class of nonlinear system with time-varying delay. Neurocomputing 149:1481–1489
Ma YJ, Wu BW, Wang YE (2016) Finite-time stability and finite-time boundedness of fractional order linear systems. Neurocomputing 173:2076–2082
Pahnehkolaei SMA, Alfi A, Tenreiro Machado JA (2019a) Delay-independent robust stability analysis of delayed fractional quaternion-valued leaky integrator echo state neural networks with QUAD condition. Appl Math Comput 359:278–293
Pahnehkolaei SMA, Alfi A, Tenreiro Machado JA (2019b) Delay-dependent stability analysis of the QUAD vector field fractional order quaternion-valued memristive uncertain neutral type leaky integrator echo state neural networks. Neural Netw 117:307–327
Peng X, Wu H, Cao J (2019) Global nonfragile synchronization in finite time for fractional-order discontinuous neural networks with nonlinear growth activations. IEEE Trans Neural Netw Learn Syst 30(7):2123–2137
Rajivganthi C, Rihan FA, Lakshmanan S, Muthukumar P (2018) Finite-time stability analysis for fractional-order Cohen–Grossberg BAM neural networks with time delays. Neural Comput Appl 29(12):1309–1320
Rakkiyappan R, Velmurugan G, Cao J (2014) Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with time delays. Nonlinear Dyn 78(4):2823–2836
Song J, He S (2015) Robust finite-time \(H_{\infty }\) control for one-sided Lipschitz nonlinear systems via state feedback and output feedback. J Frankl Inst 352(8):3250–3266
Thuan MV, Binh TN, Huong DC (2018) Finite-time guaranteed cost control of Caputo fractional-order neural networks. Asian J Control. https://doi.org/10.1002/asjc.1927
Thuan MV, Huong DC, Hong DT (2019) New results on robust finite-time passivity for fractional-order neural networks with uncertainties. Neural Process Lett 50(2):1065–1078
Wang S, Shi T, Zhang L, Jasra A, Zeng M (2015) Extended finite-time \(H_{\infty }\) control for uncertain switched linear neutral systems with time-varying delays. Neurocomputing 152:377–387
Wang L, Song Q, Liu Y, Zhao Z, Alsaadi FE (2017) Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with both leakage and time-varying delays. Neurocomputing 245:86–101
Wu H, Zhang X, Xue S, Wang L, Wang Y (2016) LMI conditions to global Mittag–Leffler stability of fractional-order neural networks with impulses. Neurocomputing 193:148–154
Xiang W, Xiao J (2011) \(H_{\infty }\) finite-time control for switched nonlinear discretetime systems with norm-bounded disturbance. J Franklin Inst 348(2):331–352
Xiang Z, Sun YN, Mahmoud MS (2012) Robust finite-time \(H_{\infty }\) control for a class of uncertain switched neutral systems. Commun Nonlinear Sci Numer Simul 17:1766–1778
Xie XC, Lam J, Li PS (2017) Finite-time \(H_{\infty }\) control of periodic piecewise linear systems. Int J Syst Sci 48(11):2333–2344
Xu C, Li P (2019) On finite-time stability for fractional-order neural networks with proportional delays. Neural Process Lett 50(2):1241–1256
Yang X, Song Q, Liu Y, Zhao Z (2015) Finite-time stability analysis of fractional-order neural networks with delay. Neurocomputing 152:19–26
Yang Y, He Y, Wang Y, Wu M (2018) Stability analysis of fractional-order neural networks: an LMI approach. Neurocomputing 285:82–93
Zhang S, Yu Y, Geng L (2017a) Stability analysis of fractional-order Hopfield neural networks with time-varying external inputs. Neural Process Lett 45(1):223–241
Zhang S, Yu Y, Yu J (2017b) LMI conditions for global stability of fractional-order neural networks. IEEE Trans Neural Netw Learn Syst 28(10):2423–2433
Zhang H, Ye Y, Cao J, Alsaedi A (2018) Delay-independent stability of Riemann–Liouville fractional neutral-type delayed neural networks. Neural Process Lett 47(2):427–442
Acknowledgements
The authors sincerely thank the Associate Editor and anonymous reviewers for their constructive comments that helped to improve the quality and presentation of this paper. The research of Mai Viet Thuan is funded by Ministry of Education and Training of Vietnam (B2020-TNA).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by José Tenreiro Machado.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Thuan, M.V., Sau, N.H. & Huyen, N.T.T. Finite-time \(H_{\infty }\) control of uncertain fractional-order neural networks. Comp. Appl. Math. 39, 59 (2020). https://doi.org/10.1007/s40314-020-1069-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-1069-0
Keywords
- Fractional order neural networks
- Finite-time boundedness
- \(H_{\infty }\) control problem
- Linear matrix inequalities