
Abstract
Faults in rotating systems can cause significant damage to the machinery and can result in downtime and production losses. Hence, the timely detection and diagnosis of faults are very important for the smooth running of machines and the assurance of their safety and reliability. In view of this, a review of the literature has been presented in the article on the types of additive faults and their identification using conventional signal-based techniques and automated artificial intelligence techniques. Through a literature survey, the faulty rigid and flexible rotor systems mounted on rolling element bearings, hydrodynamic bearings, and active magnetic bearings have been studied. The faults incorporated in this article are the additive fault types, in which the process is affected by adding process variables. The rotor unbalances, shaft or bearing misalignment, crack, internal damping, bow in the shaft, rotor-to-stator rub, and mechanical looseness are the classifications of additive faults. Additionally, understanding the rotor response through theoretical and experimental investigations influenced by the additive faults and its detection and diagnosis using vibration and current-induced signals is extremely important, and therefore the present paper briefly discusses this. Following the state of the art in the dynamic analysis and identification of multiple hazardous faults, the general remarks and future directions for further research have been suggested at the end of this article.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
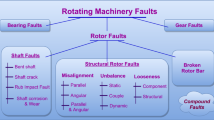
Due to the existence of serious malfunctions in the rotating machinery, the reliability in the aerospace, automobile, marine, and thermal power plant industries may be reduced to a lower level and result in a great loss of economy. The control of undesired vibration, the need for higher power and speed as well as undisturbed and continuous operation, are vitally essential in the production field. Therefore, research on the diagnosis and prognosis of faults has been ongoing for a long time. Rotating machinery (refer figure 1 for the schematic diagram of a rotor system) is affected by the impact of various faults present in the integrated components, viz., the shaft, bearings, couplings, gears, discs, turbine blades, impellers, motors, actuators, and sensors. Faults like rotor unbalance, residual bow and crack in the rotating shaft, misalignment, gear transmission error, rubs between the rotor and stator, rubs within the shaft assembly (internal damping), and looseness faults fall under the listing of additive faults. These faults may be inevitable in the rotor system during its manufacturing and installation or may develop during the normal operation of the machines [1]. The system can be deeply influenced individually by these faults and also by the interdependency of faults, in which one fault can give rise to another fault. The faults in which the process is affected by the addition of process variables are known as additive faults, whereas when the process in the faults is affected by the product of process variables, then the faults are termed as multiplicative faults. The additive or multiplicative nature of fault in the components/system can be decided by the modelling process. Additive faults can be modelled by the superposition of signals on the inputs, states, and outputs of the process. The physical reason can be based on, e.g., an offset in the sensor (or actuator) of the amplifier electronic. Multiplicative faults are parameter faults that result in changes of the parameters of the process, like changes in resistances, inductances, inertia constants or damping coefficients [2]. The basic model of additive fault and multiplicative fault has been shown in figure 2. In figure 2, the additive faults influence a variable Y by the addition of the fault f (e.g., sensor biased) and multiplicative faults by the product of another variable U with f (e.g., a parameter change within the process).

Schematic diagram of a multi-disc rotor system supported by bearings.

Basic models of fault (a) additive fault (b) multiplicative fault [3].
Several developments towards visualizing the system dynamics under individual and combined faults, as well as their identification, are being published in a range of conferences and journal publications. Moreover, to meet the industrial demand in modern days, plenty of research has been devoted towards monitoring the health condition of rotating machinery. Muszynska [4] summarized a review on mathematical models for different malfunctions, such as residual unbalance, misalignment, rotor-to-stator rub, fluid-induced instabilities, looseness of stationary and rotating parts in rotating machinery, crack in shaft, and internal and external friction in rotating machinery and presented various results in graphical forms to explore the symptoms of faults. Experimental results were gathered and utilized to illustrate the dynamic responses of the rotor under the effect of these malfunctions individually. However, the different condition monitoring techniques were not elaborated for the detection and diagnosis of these faults. Further, a summary of research on the experimental identification of dynamic parameters of supported bearings as well as different types of seals was presented by the authors [5, 6]. Most of the discussions in the review paper [5] were related to the identification of parameters in fluid film bearings. There were very few descriptions of speed-dependent dynamic parameter estimation techniques in high speed non-contact bearings such as foil bearings, active magnetic bearings, etc. Apart from this, the paper [6] is limited to the elaboration of literature published in the identification of seal parameters through experimental investigations only. Hence, the theoretical and computational techniques utilized in the field of finding rotordynamic parameters of seals can also be reviewed along with the experimental error analysis. Vibration and current signal based techniques [7,8,9] through experimental investigations have been utilized for the detection of mechanical and electrical faults in rotating elements such as induction motors, centrifugal pumps, etc. The researchers [7] have adopted vibration and current signals for the identification of only bent in the rotor of the induction motor, which can be further used in the identification of other faults such as unbalance in the rotor, bearing misalignment, and broken rotor bar under the different conditions of load. Moreover, the limitation of the paper [8] was to explore only time-domain vibration signals for diagnosing faults in induction motor with the help of multiclass support vector machine (SVM) algorithms. Thus, the training and testing of SVM can be done for diagnosing faults based on frequency and time–frequency domain data, as these data help in observing several characteristics of the signal. In a similar direction, the authors of the research article [9] stated that the time-frequency analysis using wavelet packets can also be utilized for the classification of faults. This will enhance the performance of the classifier. Făgărăşan and Iliescu [10] elaborated on various methods for the detection of faults and procedures for their identification in a modern industry. These methods include observer based methods, signal based methods, and parity equations. Walker et al [11] concentrated on highlighting the recent research done on additive faults in rotating systems in connection with sensors, fault identification techniques, localization, prognosis, and modelling. Further, an overview of applications of active magnetic bearings (AMBs) for fault identification and controlling vibration in flexible rotordynamic systems was demonstrated by Srinivas et al [12]. However, it was claimed that one of the applications of AMBs can be the identification of the depth and location of multiple cracks in rotor systems during their operational conditions. Optimization of hybrid bearings (consisting of journal bearing and AMB) can also be explored to increase load carrying capacity within space constraints. Gayen et al [13] presented a detailed review on the static and dynamic analyses of structural components composed of functionally graded materials and incorporated with crack faults. It was suggested to conduct experiments in a cracked functionally graded rotating shaft system for determining crack parameters and identifying them.
Apart from this, various literatures are also available in the area of determining failure modes through the signal processing approach in rotating machines. Benbouzid et al [14] discussed that the information about the failure mode nature of an induction motor is very important for its design and fault tolerant control. For detecting failure in induction motors, the stator current signature analysis was examined and found to be quite sensitive to induction motor faults, which modified main spectral components, such as voltage unbalance as well as single-phasing effects. The fault characteristics vibration spectral components were also observed to increase over time with an increment in the fault severity. The mathematical equations were also provided for frequencies of the spectral components in presence of multiple faults such as broken rotors, damaged bearings, rotor asymmetry, unbalance in rotors, etc. It was advised to perform more experimental investigations for the preventive maintenance, failure diagnosis and prevention in induction motors drive systems. Lin et al [15] proposed a signal processing method for determining tooth failure modes in a gearbox. The condition vibration data was obtained from eleven faulty gearboxes, which was used to examine the fault growth parameter. Various statistical as well as replacement decision models were made on the basis of the observed condition data and failure events. Using this technique, it was possible to follow the development of cracks in gear tooth. However, the sample size of the analysed data was quite small in terms of the number of histories. For future works, a larger sample size can be taken, which may result in better accuracy in the analysis and improve the efficacy of the presented approach.
Later, Liu and Zhang [16] presented a survey on failure modes, health monitoring, as well as fault diagnosis techniques in wind turbine bearings. The wind turbine bearings include main supported bearings and bearings used in various components such as the gearbox, generator, blade, yaw, and pitch. The survey was done to find a reliable and cost-effective method that can determine the fault severity and modes of the failure. This will also help in designing a better outline of proper maintenance on turbines. During the survey, it was found that the failure modes which occur in wind turbine, are basically plastic deformation of bearings (deformation on the macro scale due to excessive load and misalignment fault, whereas deformation on the micro-scale due to indentation), lubricant failure and contamination, electric arc erosion, cracks and fractures, improper mounting, etc. Finally, most research was focussed on intermediate-speed stage bearings and high-speed stage bearings, whereas there was very little research in the field of diagnosing low-speed gearbox bearings. This is because when the rotors rotate at slow speed in the wind turbine bearings, this results in producing weak fault signals.
The failure mode detection method is extremely important for the prediction of the rolling element bearing life in rotating machines. Kuo et al [17] proposed a feature extraction method and neural network model for detecting the abnormality modes. The combined techniques of wavelet packet decomposition method, principal component analysis as well as long short-term memory algorithm were used in this paper. Experiments were also performed on a machine consisting of a rotor system with a rotating wheel at the middle and supported by rolling bearings at the ends. Vibration signals were collected for the normal and abnormal conditions (i.e., misalignment load, unbalanced load, and impact load) of the machine. Further, those signals were analysed to detect failure modes in the supported bearings. Nevertheless, the abnormal conditions were considered individually. Therefore, in the concluding remarks, it was proposed to mix these three failure modes (i.e., the combination of misalignment, unbalance, and impact loads) and analyse the time as well as frequency domain signals.
After going through various literature as described in the above portion, it can be stated that the detection of various additive faults in the rotating equipment is extremely important to assess the reliability and safety of the machines as well as enhance productivity. Signal-based identification techniques and artificial intelligence techniques are required for detecting these faults within the proper time so that there is no harm to human experts working in or near the machines and prevention of substantial losses in the economy of industries. A lot of research has been done in the field of types and symptoms of malfunctions in the rotary machines and their identification methods as well as integrated approach towards failure mode and signal processing technique. However, there was no paper published that simultaneously described the causes and symptoms of additive faults, mathematical modelling of additive faults, different condition monitoring techniques, and their limitations in the rotor systems such as model-based techniques, signal-based techniques, novel artificial intelligence techniques, hybrid form of detection techniques, as well as fault identification methods in bearings. Therefore, a review has been made in this paper on the effects of additive faults in the rotors and displacement as well as current signals based faults detection and diagnosis strategies. Some of the literature is also described, which focusses on utilizing artificial intelligence techniques (i.e., machine learning techniques, deep learning techniques, etc.) for fault identification in rotating machines. Additionally, a few pieces of literature published in the area of condition monitoring of supported bearings are summarized to make this review article more interesting to the readers.
2 Additive faults in rotating systems
The following section discusses about the definition and causes of various types of faults in rotating machines. The literature survey done on additive faults, for example, the rotor unbalance fault, crack, misalignment fault, shaft bow, internal damping and rub between rotor and stator are concisely explained in this section. These faults have been considered by researchers individually or in combination but without interplay among them [18,19,20,21,22].
2.1 Unbalance fault
Unbalance in the rotor is a very serious fault in rotating machines, which produces extreme vibration in the system. This vibration may generate a high amount of force at the regions of bearings, as well as lessen the effective functioning of a machine. In a practical scenario, it is not possible to have an ideal balanced rotor due to several irregularities, inaccuracies and manufacturing errors, which result in the deviation of the rotor centre of gravity relative to the centre of rotation. Moreover, the magnitude of unbalance may differ during the operational period of the rotor, as a consequence of dust and unwanted particle accumulation, abrasion, wear and tear depreciation, etc. As the unbalance force is equivalent to the product of mass, eccentricity, and square of the rotor speed, the fault produces enormous vibration near the system’s critical speeds. Accordingly, various researchers have studied and investigated the dynamic outcome of the unbalance fault and its balancing, detection, as well as diagnostic techniques.
The balancing techniques have been described for rigid as well as flexible type rotors. Single-plane balancing, and two-plane balancing, such as the conventional cradle balancing machine method (off-site or off-field balancing) and the modern influence coefficient method (on-site or field balancing), are different methods for rigid rotor balancing. The modal balancing method as well as influence coefficient method are the two basic methods for balancing the flexible rotor. In the area of flexible rotor balancing, Bishop and Gladwell [18] proposed the modal balancing technique, which needed the correct values of the system’s modal parameters such as mode shape, natural frequency, modal damping, etc. On the other hand, Drechslen [23] developed the influence coefficient method, which exploited the amplitude and phase values of vibrational responses to determine the amounts of balance correction mass. Therefore, the influence coefficient method requires little information on the system modelling parameters as compared to the modal balancing method in the balancing of a flexible rotor.
In continuation to this, Morton [24] also utilized modal balancing technique for balancing an elastic shaft in the absence of trial masses and without knowing the values of the supported bearing parameters. Besides, the step force and deflection concepts were used at different nodes of shaft elements. The balancing technique was observed to be very appropriate for balancing of flexible shafts in the various bounds of the system’s critical speeds. However, one of the drawbacks of this work was neglecting the gyroscopic couple effect of the shaft and its rotational damping during the mathematical modelling of the flexible rotor system.
Now approaching towards the field of unbalance fault identification, a method was introduced by Krodkiewski et al [25] for determining change in unbalance caused by the loss of one or more blades in a turbine. Under this method, a non-linear mathematical model of a multi-bearing rotor system was developed based on Timoshenko beam finite elements. Each element was considered to have four degrees-of-freedom (DOFs) per node. The rotor system consisted of a flexible shaft, four similar type journal bearings as well as a rigid base foundation. From the faulty system, the displacement responses were numerically generated and the method was tested with the inclusion of Gaussian noise in the vibration signatures. The identification method was appeared to be robust and effective in nature. However, further investigation was suggested on examining the effectiveness of method with respect to an error in the mathematical model as well as conducting experimental validation. Later, Lees and Friswell [26] presented a mathematical model and least-squares technique for estimating the residual unbalance of rotating shafts, as well as discs eccentricities in a system having flexible bearings supports and rigid foundation (refer figure 3). Finite element method was used for describing the rotor-bearing model and exploring the displacement responses of the system in the frequency domain. Every bearing was considered to have anisotropic nature with four different linearized stiffness and damping coefficients. The shaft damping terms were not considered during mathematical modelling of the system. Additionally, the proposed method could not predict the phase of unbalance. In the same direction, the measured vibrational responses of pedestal was utilized by Shih and Lee [27] for determining the imbalance state in a rotor system. Although the modelling of all components of the system were done very consistently, the method was not sensitive to noisy signals in identification of unbalance characteristics. Still, the stiffness and damping terms of bearings exhibited reasonable sensitivity towards uncertainties. But, only discrete unbalances were considered at the two disc locations.

Two bearing rotor system with flexible foundation explored by Lees and Friswell [26].
In the area of rotor balancing and vibration control, a review paper was published by Zhou and Shi [28], in which the theoretical model was described separately for balancing rigid, as well as flexible rotor-bearing-disc models. Modeling of the complex rotor was done with the assistance of several sub-models, viz., the sub-model of flexible shaft, rigid disc model, linearized bearing model, and coupling model. The equations of motion (EOMs) of the whole system were acquired by assembling the equations for each of these rotor-bearing components. In the end, it was concluded that the unbalanced fault-induced vibrational displacements can be suppressed through the active balancing technique. Moreover, the proposed balancing method can also strengthen the production efficiency and economic life of rotating machinery. However, the crucial issue experienced in the proposed method was the minimal number of eight pole actuators for controlling the vibrational modes.
Besides this, the estimation of unbalance fault parameters is also extremely important in order to know quantitative severity of the fault. Accordingly, an identification technique was developed by De Queiroz [29] for estimating the unbalance parameters, i.e. the eccentricity as well as phase in a simple Jeffcott rotor. For this purpose, a dynamic robust control mechanism was utilized to generate numerically the unbalance disturbance forces. The proposed technique was valid for some ranges of rotor speeds, so it was suggested to accommodate a wider class of rotor speeds in future work. Further, an influence coefficient method was also employed by Nauclér and Söderström [30] for unbalance estimation in rotating machinery using linear and nonlinear regression techniques. The nonlinear approach showed superior performance with the help of unbalance estimation of a separator model (refer figure 4). In the considered separator model, the spring stiffnesses were modelled as complex numbers for establishing damping in the rotor system. For measurement of vibrational response at the two frame positions, the trial masses were kept in two locations of the bowl and the separator was further driven up to its operational speed. The procedure was repeated for multiple number of experiments and the proposed approach was found to be robust. However, while developing the nonlinear identification approach, the sensor noise was considered to be neglected as compared to the system disturbance.

A separator model [30].
Similarly, three distinct model based fault identification schemes were developed by Sudhakar and Sekhar [31] for identifying the unbalance malfunction in a rotating machine. Out of these three schemes, the first was equivalent loads based minimization method, the second was equivalent loads based minimization method with improvement in theoretical fault model and the third scheme was vibration based minimization method. The comparison was made for their suitability and effectiveness in the identification of unbalance fault and it was observed that the second scheme was less erroneous and better than the first scheme. The second and third schemes were found to be equally efficient in identification even in the case of lower degree of freedom system. These methods were limited to considering the measurement of vibrations at only one location of the shaft, i.e., the disc location, which could not provide appropriate results. Hence, it was suggested to measure vibrational responses at more number of locations and use this study further for detection of other severe faults, such as cracks, misalignments, bows in shaft, etc. Additionally, the investigation can also be done for the transient rotors and the steady-state condition. Thereafter, a metaheuristic method was utilized by researchers [32] to identify unbalance forces in a rotor-hydrodynamic system. This method was a combination of a genetic algorithm and simulated annealing. The genetic algorithm was helpful in improving the solutions significantly, whereas simulated annealing was able to provide good solutions with fewer iterations. The difference between measured and simulated displacement responses was considered an objective function. The values of unbalance eccentricity, phase, and position along the rotating shaft were known by minimisation of the objective function. Besides this, the proposed approach used the oil film force concept unlike the conventional model based identification techniques, which were utilizing the oil film linearized stiffness and damping coefficients. Nevertheless, there was a limitation of this paper. The weighting values in the metaheuristic method (automatic search method) were always dependent of the user choosing the weights. Therefore, it was suggested to use the multi-objective search method in future work, which can provide better results than the proposed approach.
In the same line, Menshikov [33] developed an identification methodology for estimating the unbalance parameters of a deformable rotor mounted on two non-rigid bearings. To identify the unbalance fault and bearing parameters, the displacement response in the horizontal and vertical directions was utilized as input in the proposed technique. Subsequently, the inverse problem and least square methods were employed for identification purpose. Later, a method was also proposed by Pennacchi et al [34] to identify the unbalance fault in a massive flexible rotor-coupling-bearing system. Each component of the system, such as the flexible rotor, non-rigid bearings, and elastic foundation was mathematically modelled using finite element method. Further, the information of displacement signals in the frequency domain was given as input in the developed estimation algorithm for identification of the fault location and its severity throughout the shaft axis. An experimental investigation was also executed on a 1.3 GW power steam turbine to validate the numerical work. However, the model used was not fine-tuned, and the responses in the vertical direction were only measured.
Furthermore, the idea of model based equivalent load method elaborated in Markert et al [35] was utilized by Chatzisavvas and Dohnal [21] to identify single and double unbalances in a coupled rotor model (refer figure 5). A sparse force vector was assumed to boost the procedure of identifying the unbalance with no prior knowledge about the number of unbalances. The displacement responses in both the time and frequency domains were taken into account for estimation of the fault characteristics. Although there was ill-conditioning issue owing to insufficient measuring locations and system operating at a single speed only, the developed technique yielded productive and satisfactory outcomes. However, the proposed work was limited to theoretical and numerical aspects in the identification of unbalance fault only. There was no experimental validation in a lab test rig setup or industrial machines. Although the proposed technique identified single and double unbalances in a rotor system, the identification of multiplicative faults or combined faults can also be done in the coming future.

Rotor test rig set up developed by Chatzisavvas and Dohnal [21].
In continuation of this, the two distinct techniques were suggested by Yao et al [36] to determine the optimal values of unbalance parameters, their locations and severities in a rotor system. Among these two approaches, the first was relying on modal expansion technique together with the optimization algorithms. This technique was demonstrated for identification of the unbalance fault in a single disc rotor system. The other approach was associated with the integration of modal expansion technique, the inverse problem and optimization procedure, which was illustrated for unbalance identification in two discs rotor system. The proposed techniques were verified through both the numerical as well as experimental investigations. Other than the optimization algorithms for estimation purposes, the two different identification techniques were discussed in [37, 38] for estimating the force due to an unbalance fault in a rigid rotor mounted on rolling element bearings. The first technique was a joint-input state estimation technique and the second was Kalman filter-based input estimation technique. Both the techniques were relying on the development of mathematical model and measured values of displacement and acceleration responses. The bearing stiffness constants were obtained using the developed techniques. The sensitiveness and effectiveness of the method were also checked considering the system modelling and noise signal errors for different ranges of rotational speeds, and the method was found to be robust in nature. Experimental investigations were also performed to validate the numerical results. The shortcoming of their works was the consideration of a rigid rotor and negligence of shaft gyroscopic effect.
Again, in the area of optimization techniques for unbalance fault identification, a nonlinear particle swarm optimization method (i.e., a randomized and population-based optimization method) was utilized for solving the inverse problem and estimating parameters associated with unbalance faults in a complex multi-disc rotor-bearing system [39]. For establishment of the equations of motion, the stiffness of the bearing was considered to be nonlinear and varying with speed, preload, load and other factors. In this paper, only the structural damping was considered and damping of rolling element bearings was neglected. Following the same path, Abbasi et al [40] developed a novel optimization-based method for estimating the unbalance fault parameters in a single disk and double disk rotor system. The objective function was the weighted least squared difference between the measured as well as computed displacement responses. For both cases of rotor system, the highest and lowest relative errors between the optimized, as well as actual values were zero percent for the unbalance eccentricity and phase angle in the absence of noise in the signals. The efficacy of the discussed algorithm was found to be extremely higher as compared to conventional algorithms. In a concluding remark, AMB was suggested to be used for controlling the vibration induced by an unbalanced fault in future work. Thereafter, in the recent publication, Lin et al [41] presented a novel two phase model based method to identify the unbalance and the supported bearings parameters in a turbine-bearing rotor system. In the first phase, the initial unbalances and bearing parameters were simultaneously identified, whereas the progression of unbalances was determined in the second phase. Five distinct kinds of optimization algorithms (such as generic algorithm, grey wolf optimizer, grey wolf optimizer with cuckoo search, whale optimization algorithm, particle swam optimization algorithm) were utilized to check robustness of the method. The method was found to be quite effective and robust. FEM modelling results were validated with machine’s operational data. Excellent consistency was observed in the obtained results. However, the effect of fluid film bearings, and the axial as well as torsional vibration behaviours of the rotating shaft were neglected in the present model of the system.
Further, a real application based drilling rig is an important machine. It is generally utilized for exploration and mineral resource development. Unbalance fault may exist in the horizontal shaft of rotary table of the rig owing to various factors such as accumulation of unwanted materials or dust particles, errors in assembly, etc. This can cause severe vibration in the system, which will immensely minimise working accuracy and efficacy as well as even affect construction safety. In order to get rid of this issue, Wang et al [42] proposed an identification technique relying on fast Fourier transform for finding unbalance fault parameters in the horizontal shaft. The output results of this method (i.e., amplitude and phase of vibration) were observed to be quite stable and accurate, as compared to the two other methods such as cross-power method and cross-correlation method. Dynamic balancing procedure was also carried out in an electric spindle experimental platform and found that the vibrational amplitude was greatly reduced i.e., 98.6% after dynamic balance. The limitation of this work was using the shaft at the end of the electrospindle for the purpose of the experiment. Therefore, in the concluding remarks, it was suggested to execute the proposed method of identification and balancing on the actual condition of the drilling rig.
Now, coming to the latest publications in the area of rotor balancing techniques, as a balancing technique is also important for suppression of the vibration caused due to unbalance fault. Zhang et al [43] developed a new method based on signal purification for solving the dynamic balancing problem of a rotor. The signal purification technique included signal resampling and spectrum correction. This technique was also used for suppressing vibration due to unbalance fault. Experiments were also performed on a test rig set up consisting of a rotor system linked with two discs and data acquisition as well as processing device. However, the range of speeds chosen for balancing the rotor was lower and the rotor was considered as rigid in nature. Hence, it was advised to develop modified signal purification based method for effectively balancing a high speed multidisc rotor. Shun and Lei [44] also proposed an unsupervised deep Lagrangian network method for balancing of the rotor. For introducing the prior knowledge of physical test rig setup, a Lagrangian layer was applied to the network. Both experimental and numerical works were executed to validate the developed balancing method. Numerical simulation was done by considering a rotor system having four rigid discs and two ball bearings support. Newton’s second law was used for establishing equations of motion of the system. The responses like displacement, velocity and acceleration were generated by solving equations of motion using Runge-Kutta method. Similarly, the test setup for experiments was also comprising of a shaft with four discs, motor, eddy current sensors, dynamic force sensors, two ball bearings for the support purpose, etc. Output results of the rotor balancing through simulation and experiment proved that the technique was reasonable, costless and user convenient. Lastly, it was claimed that the balancing procedure can give much better performance if the rotor system parameters can be adjusted and optimized as well as the large number of sample data size can also be taken. These would help in gaining more effective and useful informations.
Further, unbalanced force identification is extremely needed to overcome the impact of unbalance force and guarantee the safe operation of machines. Hence, Lin et al [45] utilized deep learning method for identification of unbalance force in a hypergravity centrifuge structure. A feature fusion framework was developed in combination with the time domain signals for exploring the identification effect. It was found that the proposed approach is simple and quite reliable as compared to the conventional unbalanced force identification technique. This approach surpasses the concept of trial mass and model complexity. However, less number of signal data samples and low rotational speeds of the centrifuge rotor (i.e., low operating frequency range) were considered in the present approach. In a similar line, Baltazar-Tadeo et al [46] also proposed an integrated rotor balancing method for the identification of unbalance force in a multi degrees-of-freedom unbalanced and asymmetric rotor-bearing system. This method included the methodology of parameter algebraic identification and the traditional modal balancing approach. The developed algebraic identifier needed the displacement response as input data, in place of the vibration response obtained by putting trial weights in the traditional rotor balancing methods.
This section describes the research performed in the field of rotor balancing through modal balancing as well as influence coefficient methods. The latter method was found to be more effective and reliable than the former method. The different ways of unbalance fault identification using model based techniques and measurement of vibration responses have been utilized by several researchers in both experimental and numerical working environments. However, there are various scopes of work in investigating the dynamics of the rotor under the effect of unbalance faults and its identification technique. A joint-input state as well as Kalman filter-based input estimation techniques can be used for estimation of the unbalance fault parameters and bearing characteristics in a flexible rotor with multiple discs and consideration of gyroscopic moments. AMB technology can be used as a vibration controller in an unbalanced rotor system, along with a nonlinear particle swarm optimization method for unbalance identification. Apart from this, researchers have also used deep learning method and optimization technique for rotor balancing and unbalance fault identification in a rotor-bearing system.
2.2 Crack fault
The rotor crack is a major malfunction, which may cause fatal machinery breakdown in case of not detected properly in time. This fault can lead to interruption in the smooth and efficient functioning of the industry. The base for crack initiation may be due to fatigue of the shaft material, caused by unrestrained cyclic working of machines. The shaft crack in transverse direction is very hazardous because this instantly varies the system's vibrational nature. Usually, the switching crack concept has been used for mathematically modelling the transverse crack, which opens and closes at regular intervals of time [47,48,49,50]. The concept of switching crack is considered for the case of crack depth below the radius of the shaft. Moreover, the hinge model is employed to explain the vibrational nature of switching crack.
Nelson and Nataraj [51] developed an analytical method for a flexible rotor system having transverse crack along with a solution procedure and associated digital computer program. A finite element model, in complex coordinate form, was used to formulate the system equations of motion. After that, the static condensation method was exploited to reduce the degrees of freedom. A periodic switching function expanded in a Fourier series was considered to model the opening and closing mechanism of the transverse crack. The developed program was utilized to study the system dynamics and compared the obtained results with the analytical and experimental results of other researchers. It was found that the sign of the minor axis for every harmonic of the response is a function of the rotational speed. Moreover, the phase angles for the harmonics of the response was also appeared to be very sensitive at the subcritical resonance speeds. However, the rotational coefficients of bearings were neglected by them during the development of system’s model. Rotational stiffness coefficients of bearings are defined as the ratio of force due to bearings and angular deflection at the bearing locations, whereas the rotational damping coefficients of bearings are defined as the as the ratio of force due to bearings and angular velocity at the bearing locations. Similarly, considering a transverse crack in the rotating shaft, the vibrational behaviour of a cracked rotor system having breathing nature was investigated by Jun et al [52]. In their study, the crack was assumed to be located at the mid-span of the shaft and the effect of shear stress was neglected. The fracture mechanics theory was employed for deriving the direct and cross-coupled stiffness constants of the cracked rotor system. It was also shown that the retardation angle of the crack opening can be an acceptable mark of the crack depth. Later, the stability analysis of a simple rotor with a middle disk and transverse crack was done by Gasch [49]. Forced vibrations arising from crack and unbalance faults were considered based on hinge model with no damping. The gyroscopic effect due to disk was assumed to be negligible. The hinge model includes only one additional parameter to describe the influence of crack and is applicable only for the crack depth below half of the shaft radius. Weight dominance effect (i.e. the vibration amplitudes are very lower as compared to the shaft’s static deflection) was assumed for transforming the non-linear equations of motion into linear form, but having periodically time-variant component. It was noticed from spectral analysis that the amplitudes at the integer multiples (i.e. 1, 2 and 3) of rotational speed get increased to the same extent as the crack grows.
Other than considering a transverse crack in the shaft, a slant crack (i.e., crack depth making an angle with the shaft axis) was assumed to be present in a rotor system and its dynamic behaviour was analysed by Sekhar and Prasad [53] with the help of finite element analysis. This slant crack appears in the rotor due to shaft fatigue failure, by virtue of excessive torsional moment. A flexibility matrix was developed expressed by a stress intensity factor for a slant crack relying upon fracture mechanics concept and consequently, the stiffness matrix for a slant cracked element. Three different types of slant crack, i.e. the quarter crack, half crack and round crack were discussed, but quarter type was considered for the analysis purpose. For the eigen-frequency analysis, the crack was considered fully opened. Eigenfrequencies were found to be decreased by increasing the slant crack depth. The effective stiffness of the rotor system also got decreased due to slant crack. A steady-state analysis of the rotor system was also done by utilizing the fast Fourier transform technique for identification of the slant crack. It was found that the frequency spectrum of the steady-state response of the cracked rotor accommodates subharmonic frequency components at an interval frequency complying with the torsional frequency. Anyhow, there was no consideration of coupling between axial, bending and torsional modes in the presented model.
Instead of considering only single transverse crack in a rotor system, the vibrational characteristics of a simple rotor with two aligned and open transverse cracks were presented by Sekhar [54] through finite element modelling. Even the rotor system was not having any disc, so the non-gyro, undamped and stationary rotor was considered for the eigenfrequency analysis. A stability analysis of the rotor system was also performed, in the rotor was affected by internal damping and crack faults. The main objective was to observe the impact of one open crack on to another crack for different eigenfrequencies, mode shapes as well as threshold speed limits. Through this, it was noticed that a shaft with a low slenderness ratio will have significant changes in eigenfrequencies and the larger crack out of the two cracks of two different depths had a crucial influence on the eigenfrequency. The effect of cracks on threshold speed limits was also found to be more appreciable in comparison to the minimisation of eigenfrequencies related to crack depth. This work can be extended further for the presence of two cracks in two different directions in a flexible rotor system.
Further, an AMB technology was utilized by Zhu et al [55] to examine the dynamics of a middle disc-rotor system incorporated with an AMB (working as damper) near the disc location (follow figure 6). AMB was used for the sake of suppressing vibrational motion of the disc. The transverse crack was present at the disc location only and the gyroscopic effect of the rotor was neglected. The numerical method, i.e. Runge-Kutta 4th order ordinary differential solver of fixed and small step-size had been utilized to get the solutions of the nonlinear dynamic equations of the system. It was found that a crack in AMB-rotor system could be detected by the harmonic peaks of twice and thrice of the shaft rotating frequency. More alternative diagnosis methods are needed to detect crack in the AMB-rotor machines using the complex control algorithms, such as the H∞, variable structure and robust adaptive controls.

A cracked rotor-AMB system with a middle disk [55].
Apart from analysing the rotor behaviour under the effect of crack faults, different techniques have been exploited for the identification of crack faults. Sekhar [56] developed a model based on-line identification method with modal expansion for detecting crack in the rotor system. Equivalent loads minimization approach was utilized for this purpose. Virtual forces or moments applied on the intact rotor system were treated as equivalent loads, which produce vibrational nature similar to the damaged rotor system. Next, the comparison was made between the equivalent loads calculated through measured vibrations as well as the mathematical model to identify the crack depth and its location. Finite element modelling was utilized to describe mathematical equations of system components of the rotor. The fast Fourier transform (FFT) was employed for finding the nature and symptom of the crack fault. It was also observed that the efficiency of the presented method relies on choosing the number of shaft locations for measurement. Subsequently, Sekhar [57] identified two cracks (in transverse direction and having breathing behaviour) in the rotor system using the previously developed identification method. The estimated equivalent forces at the two locations on the shaft were used to identify two cracks in the system. The method was utilized with the evaluation of equivalent loads to identify the two cracks, since the FFT of the estimated equivalent force did not identify them together. Only numerical investigations were presented; therefore, the experimental validation of the proposed technique for detection of two transverse cracks in a rotor-bearing system can be done as future work.
Following the similar technique, Dharmaraju et al [58] presented an estimation methodology to identify crack flexibility coefficients, as well as crack depth in a simple rotor based on the information of excited force and response. The transverse crack was treated as always open. Crack location as well as the amplitude and frequency of the excited force were known. The finite element method having the Euler-Bernoulli beam element was employed for modelling the system’s components. The static reduction scheme was used for reducing the number of measured responses. So, the only measurement of the degrees of freedom at cracked element nodes was required to evaluate crack flexibility coefficients using the identification algorithm. An error function was defined between identified and theoretical crack flexibility coefficients, which was evaluated based on the fracture mechanics concept. Consecutively, the crack depth was calculated by diminishing the error function relative to the crack depth ratio. This minimisation was done using least squares and bisection methods. To mimic the practical experimentation, the proposed method was also examined and found to be robust under the availability of measurement noise. The major limitation of this work was that the static reduction scheme could not eliminate rotational degrees-of-freedom at the crack element nodes. Therefore, to overcome this issue, the same methodology and error function were further utilized along with hybrid reduction scheme to estimate the crack flexibility coefficients and crack depth in a simple rotor based on force and response information. In the hybrid reduction scheme, the stiffness terms were neglected on assumption of eliminating measured rotational degrees-of-freedom (DOFs) at the nodes of cracked element [59]. In both the presented works, the damping coefficient of shaft was ignored in the rotor system. Likewise, a mathematical model-based identification method was proposed by Pennacchi et al [60] for detecting transverse cracks existing in industrial rotor-bearing systems. Three distinct types of crack based on its depth were considered to examine the developed methodology, in which the first type was crack with a depth of about 34% of the shaft diameter, the second was partially breathing crack having a 14% crack depth and the last was deep crack of 47% diameter depth. The method was quite effective and robust and accurate even when it got validated experimentally on a massive and horizontal cracked rotor test rig. For identification of cracks, only the displacement measurements were required nearby or on the supported oil film bearings and these measuring planes are suitably available in industries.
Other than original research articles, some review articles were also published by authors. Sekhar [61] presented a summary of the different works done in the field of diagnosing double or multiple cracks in vibrational machines or structures such as shafts, pipes, beams, and composite plates. The modelling features, vibration outcomes, as well as identification techniques, viz., the change in eigen-frequencies, model-based method, and wavelet transform technique were discussed for diagnosing multi-cracks. Several challenges included in the multi-cracks, for example, the cracks location and orientation relative to one another, alteration in mode shapes, as well as difficulty in examining distinct vibrational structures having multiple number of cracks were also elaborated in the paper. At last, it was suggested to do further studies on optimization technique in identification of multi-cracks, in which there would be more number of the crack variables. Later, Kumar and Rastogi [62] reviewed on dynamic nature of cracked rotor-bearing system based on the previous research. All the modelling approaches i.e., wavelet finite element approach, wavelet transform, the Hilbert-Huang transform, breathing mechanism of crack, and model-based identification method were described, for diagnosis of crack fault and studying vibrational nature of the rotor system. Lastly, an extended Lagrangian concept was explained for exploring the dynamics of the rotor with a crack fault, as the classical Lagrangian equation was unable to do analysis of the dynamics of the system with non-holonomic constraints, non-potential forces, and dissipative forces caused by asymmetric effects in rotating machine components. The review work can be extended to include studying the different modelling approaches for the identification of other additive and multiplicative faults. Singh and Tiwari [63] proposed an innovative method for identification of the multi-crack, their locations along with sizes on a cracked shaft using transverse frequency response functions. The algorithm was based on the two stages in which the first stage included the algorithm for detection of number of cracks and their locations in cracked rotor and the second stage included multi-objective genetic algorithm for obtaining the accurate location of cracks and their sizes. This identification methodology was tested with numerically simulated response from a shaft having two open cracks and found to be effective and robust. The shortcoming of their work was the assumption of only two open cracks with same orientation.
Apart from considering cracks in a rotor system linked with rigid discs, a slant crack was also assumed to be present in a gear-shaft system [64]. The crack may develop as a result of usual torque transmission through the gear system. Based on this conception, the authors developed mathematical equations for the gear-rotor system made up of two shafts mounted on each of two flexible bearings (refer figure 7(a)). The vibrational characteristics of the system was explored and the rotor whirling nature, instability and steady-state analyses were studied under the influence of unbalance fault, slant crack as well as tooth error excitations. From the analysis, a slight shifting of the resonant peaks in the rightward direction was observed for the slant crack in comparison to the transverse crack. The axial translational vibration of the rotor was neglected during the modelling of the system.

Shravankumar and Tiwari [66] proposed a model based method for estimation of the unbalance as well as crack multi-fault parameters, i.e. the eccentricity of the disc, viscous damping coefficient and additive (negative) crack stiffness with the help of full-spectrum signal. Complex Fourier coefficients of the force and response were obtained by full-spectrum, then these coefficients were utilized in the estimation equation in order to identify various parameters. A Laval rotor with a crack in the transverse direction was considered near the mid-disc position. The gyroscopic moments due to the disc were neglected in the system modelling. The algorithm was formulated using the linear regression technique of equation of motion in frequency domain. The parameter estimation was done for multiple measurement speed range. Actually, there is no noise present in numerical responses, but measured responses have embedded noise. So, Gaussian random white noise was added with numerical responses (estimated values of parameters) for comparison with measured values of parameters at different noise levels. This comparison confirmed the efficacy and potency of the proposed algorithm.
Further, an AMB was used by Singh and Tiwari [50] as a vibration controller in a cracked Jeffcott rotor system with a disc at the middle position and also in a cracked Jeffcott rotor-bearing system with one disc at the offset position of the shaft [65]. In both the papers, AMB was placed near the disc location to keep vibrational displacements to a minimum value. Other than the estimation of the disc eccentricity and phase of unbalance, viscous damping coefficient, additive stiffness of crack, force-displacement and force-current stiffness coefficients of AMB were also identified through the developed identification algorithm. Figure 7 (b) shows a lumped parameter model consisting of a massless cracked shaft having an offset disc and an eight-pole AMB with ends supported on rigid bearings. The vibration displacement and the controller current of AMB were utilized for identification of unbalance, crack and bearing parameters. Thereafter, a full-spectrum analysis was used for converting the time domain responses into frequency domain. Following that, the multi-harmonic complex reference generator was implemented successfully to accomplish the phase correction in full spectrum harmonics. Dynamic condensation technique was used to remove rotational displacements. This algorithm was tested numerically against various levels of errors in signal noise and model parameters, which was observed to be powerful in estimation. Further, FEM was used for modelling of the transverse crack in a flexible rotor system supported by conventional bearings [67]. However, the assumption of discrete unbalance concept was used by them for modelling of unbalance force in the rotor.
Despite of earlier discussed research papers relying on model-based method, a new technique based on squared gain of vibration amplitude was utilized by Gradzki et al [68] to detect crack fault. Both experimental and numerical simulations were performed to evaluate the effectiveness of the proposed method. For removing environmental signals i.e., sensor noise, external disturbances, etc. from the diagnostic model, the two time intervals were analysed. One was related to the operational signal, and another was for the environmental signal. However, a short-time-interval concept was used so that the environmental signal remained unchanged in those time intervals. The method was capable in detecting the crack fault in the existence of variable amplitude data and reasonably high measurement disruptions. It was also planned to perform experiments in the future and detect other faults such as misalignment and rub using this method. Thereafter, fifteen tree classification-based machine learning algorithms were used for the localisation and identification of cracks on wind turbine blades [69]. The algorithms have taken the blade’s vibration response as an input received from piezoelectric accelerometer. The obtained results were compared with statistical, histogram as well as autoregressive moving average analysis. It was observed that the machine learning approach was quite helpful and effective in health monitoring of the wind turbine blade. This would enhance the harvest of wind power capacity and minimise downtime of the windmill.
In the field of identification of crack fault in a gear system, Yang et al [70] detected crack in a spur gear tooth by developing three degrees-of-freedom gear pair model. The tooth backlash as well as nonlinearity in the bearing clearance were considered for the purpose of model development. Further, the tooth crack model presented by [71], has been explored, in which both the crack and length were taken for modelling tooth crack propagation at various stages. It was also possible to predict the gear mesh stiffness and vibrational nature of the cracked gear using the model. Nevertheless, the crack fault was assumed in one of the tooth only so that the frequency of tooth crack can match with shaft rotational frequency. In the same year, the non-dimensional equations of motion of a cracked Jeffcott rotor system with two rigid bearing supports have been developed by Xiang et al [72]. Gyroscopic couple effect, torsional vibration and shaft damping effect were neglected while developing the equations of motion. Various time domain displacement responses, frequency domain responses, displacement orbital responses were plotted near the half subcritical speeds for studying the vibrational characteristics of the cracked rotor. It was claimed that whirl orbits having one inner loops around half of the critical speed can be a good indication for detecting the crack fault. Lastly, for future work, it was suggested to do experiments on a rotor system incorporated with crack and rotor-to-stator rub faults. Peng and He [73] studied the effect of breathing crack location on the whirling vibrational behaviour of a cracked rotor having rotational damping. Campbell diagrams, decay rate and roots locus plots were used for examining the dynamic effect on the rotor due to presence of the crack at different locations. Influence of gyro torque was ignored in the considered rotor model. Further, the method of multiple scales and Hilbert transform were used for identification of the nonlinear breathing crack with its severity in a plate structure, in which the plate was assumed to be perfectly elastic and isotropic [74]. Afterwards, Mohammed et al [75] explored vibration-based techniques for fault detection as well as diagnosis of gear-tooth cracks in an automotive gear box test rig. The dataset of vibration signal was analyzed with the assistance of an artificial feedforward multilayer neural network with back-propagation, to predict the severity of gear-tooth cracks. High amplitudes of vibration were observed for the case of larger crack size in the high-speed shaft. Lastly, it was recommended to compare the proposed method for different faults with larger data samples and other statistical features.
Ensemble learning approach was proposed by Zhong and Ban [76] to diagnose crack faults in a rotor system in nuclear plants. This approach could overcome the limitations of traditional machine learning approach. The machine learning method has issues of insufficiency in field fault data and a high level of noise in measurements. The observation was made that the proposed ensemble learning models provided more effective diagnostic results than the single model in the presence of noise and small data for case studies on experiments in gear as well as bearing’s fault. However, there was a limitation of the discussed ensemble learning technique as the models became overfitted and could not generalize well to new data due to small training data. In a recent publication, Qiao et al [77] established a mathematical model of a two-stage cracked gear drive system in a wind turbine. The time dependent mesh stiffness and gear pair contact stress were acquired using the finite element technique. Experiments were also performed to verify the proposed model. It was found that the crack had a crucial impact on the mesh stiffness of the single-tooth contact zone. Also the cracked gear drive system affected the other-stage gear drive because of gear mesh coupling. Then, a deep learning approach was developed by Wang et al [78] in order to detect crack fault at four distinct locations in asymmetric shafts. Convolution neural network method was used to extricate the fault characteristics of the generated signal and accomplish the categorization task of crack location. At the last, it was proposed to do more experimental research on other rotor fault types and enrich the data set.
The research done in the area of analysis and identification of crack fault in rotor systems has been reviewed in this section. The distinct types of crack based on crack direction (i.e., the longitudinal crack, transverse crack, slant crack), crack depth, and open and switching crack, were explored in the literature survey. For identification of the crack fault, the mathematical model based techniques have achieved more significance in the rotor dynamic field. Some of the research has used AMB for controlling the fault-induced vibration and detecting cracks in the rotating machines. The effect of tooth-crack fault and its identification in gear-based torque transmission system has been also explored by few researchers. However, the rotational coefficients of bearings, the coupling between axial, bending and torsional modes can be considered during modelling of the cracked rotor system in the future work. Optimization techniques and machine learning approach can be explored for identification of multi-cracks with more variables in the crack fault. Experimental works can also be done for studying the dynamic analysis and identification of two or more open and switching cracks with different orientations in flexible rotor systems.
2.3 Misalignment fault
Other than the above discussed unbalance and crack faults, the misalignment is also a frequent malfunction in rotor systems. The offset between the axis of supported shaft with respect to bearings axis or offset between two coupled shafts may be the prime reason for development of misalignment fault. This fault may exist in the system on account of thermal distortion of the machine components, inappropriate fitting and installation or improper assembly. Reaction forces as well as moments are developed at the coupling position due to misalignment fault in rotating machineries, which can cause an excessive vibration in the system. This high amplitude vibration may result into breakdown of the rotor system or its components by reducing their fatigue life [79]. This fault can also lead to additional loads being applied to the bearing. Along with radial vibration, there can be axial vibration in case of misalignment, unlike unbalance case, which consists of pure radial vibration.
In the field of coupling misalignment, the vibration signal based method was utilized by Dewell and Mitchell [80] for detecting parallel misalignment as well as angular misalignment in a metallic-disc-type rotor-coupling system. The mathematical expression was provided for the moment due to the angularly misaligned gear coupling. The theoretical model was also validated experimentally using a real-time spectrum analyser. It was noticed that the misalignment in disc coupling can be identified by vibration frequency of 1× and 2× times the rotor spin speed. Further, Sekhar and Prabhu [81] studied the dynamic consequences of combined misalignment (both parallel and angular) in a coupled shaft-disc-bearing system. In order to develop the dynamic equations of the faulty rotor as well as bearing components, a FEM model with higher-order elements was utilized in the article. In this process, the shafts were discretised into finite number of elements with eight DOFs per node, which included deflection and slope of the shaft as well as shear force and bending moment. The gyroscopic effects of the rotor and the reaction forces as well as moments as a result of coupling misalignment were also incorporated in modelling of the system. The existence of vibrational frequency of 2× times the shaft speed was useful in identifying the coupling misalignment in flexible rotating machinery. Subsequently, the same method and model were employed to perform dynamic vibrational phenomenon, viz. the eigenvalues and unbalance as well as misalignment response analyses [82]. However, the model was developed with the assumption of linear spring rates for the flexural coupling in both the bending and axial nodes.
Apart from coupling misalignment, there is chances of misalignment in the supported bearings. The reaction forces due to bearings are extremely responsive to the parallel misalignment. Besides this, a variation in the reaction forces of hydrodynamic journal bearings causes alteration in the dynamic coefficients (i.e., damping and stiffness) of the bearings. Hence, it is portended to considerably affect the system’s vibrational nature and stability by changing the displacement amplitudes in the range of rotational speed of the rotor. Hu et al [83] did an experimental investigation on misaligned journal bearings and observed changes in the static deflection line and bearing coefficients due to bearing misalignment in the lateral direction. The study can be extended for different combinations of misalignment in the supported bearings.
Later, FEM modelling was utilized by Prabhakar et al [84] for exploring the transient vibrational nature of a misaligned (both parallel and angular) coupled rotor system in the transverse direction. The coupling joint model was presented for two different states, in which the first was frictionless joint and the second was a joint having damping and stiffness coefficients. The continuous wavelet transform technique (CWT) was used for generating the frequency domain data from the time domain signals. They perceived higher critical speed of the system for the case of second joint model as compared to the first joint model. Moreover, the subcritical speeds were noticed in CWT coefficient plots available in the misaligned rotor system. The experimental verification of the proposed theoretical concept can be carried out as future work for betterment.
The effects of angular misalignment on stability of two coupled rotors were investigated by Al-Hussain [85]. Liapunov’s direct method was employed for derivation of the differential form of EOMs of the non-linear misaligned rotor-hydrodynamic bearing system. The two rotors (having a disc at the middle of each rotor) were fastened using a flexible coupling. From the numerical simulation, it was observed to have an advancement in the stability region of model with enhancement in the angular misalignment or stiffness constants of coupling. Later, Pennacchi and Vania [86] focussed on two distinct fault diagnosis techniques for identification of coupling misalignment, such as the orbital response analysis as well as the model based technique using frequency spectrum. Both experimental and numerical works were performed, where it was noticed that 1× vibrations occurs due to the angular misalignment between generator and gearbox. One important point was also analysed that the conventional condition monitoring techniques can be merged together with the model-based methods, in order to have an absolute health inspection and to impart certain essential information necessary for protective and predictive maintenance. However, the shortcomings of their work were not including parallel misalignment or combined misalignment (parallel and angular) in the coupled rotor system.
Patel and Darpe [87] executed an experimental work using full spectrum analysis and orbit plots for examining vibration signal of the misaligned rotor-coupling system. The two shafts-disc rotor system was having rolling element bearing supports and combined misalignment between the coupled rotors. The angularly and parallelly misaligned rotors revealed, respectively, the outer and inner looped orbits in the displacement response. In full spectrum response plot, the misalignment fault exhibited a significant amount of +2× and -2× vibrations. Nevertheless, some of the results were valid particularly for three pin-bush-type of flexible coupling. It was also suggested to perform more experiments for investigating the effect of several rotor and support parameters on the misalignment fault. Thereafter, Arebi et al [88] used an integrated wireless sensor attached to the surface of rotating shafts and FFT signal for detecting the motor shaft misalignment with the loader shaft. These shafts were connected with the help of rubber spider flexible coupling, in which the ring as well as pin can have motion in the radial and rotational directions owing to the presence of an elastomeric rubber sleeve. Increment in the displacement amplitude at 2×, 3×, and 4× vibrations was found as a result of misalignment fault. However, the system was assumed to have a dynamically balanced rotor. In the same year, a hypothetical model was built by Messaoud et al [89] to explore the dynamics of a rotor-AMB system with the angular misalignment. The considered model consisted of a motor shaft supported by a rigid bearing and the angularly misaligned main rotor mounted on two identical AMBs as shown in figure 8 (a). The proportional-derivative (PD) controller was utilized as a vibration control scheme in equations of motion of the system. Further, the investigation was done on the vibrational effect of the rotor under the influence of rotor-to-stator air gap as well as at various rotational speeds. The intensity of electromagnetic forces was noticed to be decreased with increase in air gap. Moreover, the forces due to AMBs were insensitive to the rotor speed. The vibratory level of the system was enhanced with elevation in the misalignment angle. The limitation of this work was that only angular misalignments was considered, not parallel and combined misalignments, in the rotor-bearing system. Further, a proportional-derivative (PD) controller was employed for simplicity’s sake of equations of motion.

The theoretical model of a turbogenerator system was built for the misaligned-coupled rigid rotors [91] and flexible rotors [92]. The model was comprised of two rotors having two flexible supports at each rotor and fastened using a flexible type coupling. The system’s dynamic equations were obtained, respectively, from Lagrangian approach and finite element method for the rigid rotor and flexible rotor models. The model of misaligned coupling was presented using the coupling’s damping and stiffness constants together with displacements at the locations of bearings. After that, the identification algorithm was proposed for estimating the disc unbalance eccentricities and phases, dynamic coefficients of flexible coupling and supported bearings by utilizing the frequency domain displacement signals. The method was extremely suitable and efficient in identification of various parameters even against the incorporation of signal noise and rotor modelling errors. Later, the validation of the identified results was done with the help of experimentation for distinct values of parallel as well as angular misalignments in the coupled rotors [93]. Lastly, in the concluding remarks, it was advised to implement the proposed technique in a practical turbine-generator model.
Experiments were conducted by Verma et al [94] to explore the effects of various levels of lateral, angular, combined lateral as well as angular misalignments on the displacement and stator current signatures. The rotor system was consisted of a misaligned and coupled rotor supported by fluid film bearings. FFT analysed waveforms of displacement and current along with the orbital shapes were utilized to identify the remarkable features of misalignment fault. It was observed that alone the stator current signature can be useful in predicting the coupling misalignment fault. The vibrational amplitude was higher in the horizontal direction as compare to the vertical direction, as a consequence of the enhanced preload effect of rotor in the vertical direction. Jang and Khonsari [95] carried out a brief survey on the features of misaligned hydrodynamic journal bearings. Some of the bearing factors, which get affected due to misalignment are the thermal and elastic deformation, surface roughness, and lubricants. The research is needed to explore in the development of an analytical technique for prediction of time dependent wear in protective and over-layered engine bearings. Later, the authors also explored the misalignment effect on the performance of a dynamically loaded engine bearing utilizing the concept of mass conservative cavitation algorithm [96]. In this article, it was suggested to investigate more on thermal effects, which can play a crucial task in minimising the film thickness and assisting metal-to-metal contacts. These considerations will boost complexities in the mathematical formulation of the misaligned engine bearings.
Experimental and numerical investigations as well as a signal extracting technique were presented by Sawalhi et al [97] to analyse the vibrational dynamics of a misaligned center-hung rotor-bearing system. For developing general equations of the complete rotor model, the finite element method was utilized, in which the mass, damping and stiffness terms of flexible shaft, disc, coupling and bearings were taken into account. The equations were solved using a variable-step solver in Simulink-MATLAB based graphical programming environment. The coupling misalignment force was calculated from the coupling stiffness constants and shaft displacements nearby coupling location. The stiffness of the coupling was acquired using the shaft spin speed and the parallel misalignment amount. Experiment work has shown extremely satisfactory results with the numerically simulated data. Moreover, there was an enhancement in the higher as well as lower harmonics of frequency domain signal with fluctuations in the shaft rotational speed. Lastly, it was advised of doing further investigation and understanding the actual misaligned shaft-coupling interaction mechanism through the observed responses. Afterwards, the finite element modelling and experimental work were executed by Lal [90] for estimation of the speed-dependent parameters associated with the flexible bearings, rotor unbalance and misaligned coupling parameters in a multi DOFs turbine-generator model as depicted in figure 8(b). The least-squares method was used for solving the overdetermined system of identification equation and obtaining the system and fault parameters. Three levels of Gaussian noise and erroneous in modelling characteristics (i.e., 1%, 2% and 5%) were added in the system and then, the identified results were compared with the case for a clean signal. The results were found to be excellent and quite effective. However, the gyroscopic effects due to wobbling of both discs were neglected in the present analysis.
A methodology was proposed for identification of unbalance, AMB constants, bearings stiffness, coupling’s static stiffness, and additive coupling stiffness (ACS) coefficients in a turbogenerator system incorporated with AMB [98], as shown in figure 9(a). The estimated values of ACS coefficients were the direct indicators of the nature of misalignment and its magnitude. The sensitivity of the developed method was tested by adding noise signal and system modelling errors. Other than coupling misalignment and misalignment in journal bearings, the misalignment fault in active magnetic bearings was explored for rigid as well as flexible shaft [99, 100]. The dynamic response and identification of unbalance as well as misalignment faults in AMBs levitated rotor system were presented by [101,102,103]. An unconventional trial misalignment concept was used for estimating the unbalance fault and residual misalignment of AMBs along with their force-displacement and force-current stiffness constants. The vibrational effect of misalignment over the displacement and current output of proportional-integral-derivative (PID) controller was also explained with orbital plots. Further, an extension of this work was executed by Tiwari and Kumar [104] where the trial misalignment was provided to the rotor virtually by an additional bias current and the misalignment in displacement sensors was also identified along with unbalance, AMB misalignment as well as stiffness constants in a flexible rotor system (follow figure 9 (b)). However, the reported works were based on the theoretical and numerical simulation aspects only. So, the experimental works can be executed on a test rig set up to validate these results and analysis.

Recently, a review paper was published by Kumar et al [105], in which the different techniques for diagnosing misalignment fault and its effect on bearing as well as other rotor system components were described. The elaborated techniques were acoustic emission based techniques, temperature based techniques, and vibration based techniques. Out of these, acoustic emission techniques were observed to be effective and reliable for detection of misalignment fault. The fault can also be detected at early stage as it can alarm the system before the fault occurs so that a sophisticated and planned maintenance can be done and sudden breakdown can be well prevented. But, the model based techniques were not discussed for the misalignment fault identification, misalignment in high speed bearings such as foil bearings, active magnetic bearings, etc. Hu et al [106] designed and fabricated a misaligned triboelectric nanogenerator having three span rotor system. The supported bearings were taken as measurement points for time and frequency domain displacement as well as triboelectric current signals. ResNet-18 convolutional neural network was found to be providing highest accuracy in the detection of misalignment fault, as compared to other deep learning approaches. This was the first demonstration for health monitoring of such complex rotor system, which requires troublesome in installing sensors and complexity in the transmission path. The shaft misalignment is very important in a flexible rotor system. The dynamic modelling and analysis of a spline joint-flexible coupling-rotor system has been elaborated in the research paper [107]. A mathematical model of the spline joint was developed, which has taken in consideration the static misalignment due to the setting up of the spline joint and the drive shaft.
The present review covers mostly the dynamic effect and identification of coupling misalignment (parallel, angular, or parallel and angular) in rotating machinery such as simple Jeffcott rotor systems, coupled rotor systems, turbogenerator models without and with AMB. Literature is also available in the field of bearing misalignment in hydrodynamic journal bearings and active magnetic bearings. Misalignment fault is found to be detected using the system’s vibration signature and fault parameters. However, more experimental investigations are required to study the influence of different types of coupling and their parameters as well as support conditions on the misalignment fault. The model-based identification methodology can be explored for a practical turbine-generator system incorporated with bearing and coupling misalignments using data of measured vibration. Along with these works, the analysis of the thermal effects and film thickness can also be further studied in the misaligned engine bearings as a future scope.
2.4 Rubbing among rotating parts
Internal damping in rotating machinery occurs when the material fibres are alternatively compressed and stressed because of variation in velocity as well as displacement of a point on the shaft axis relative to dynamic equilibrium states. The internal damping is also developed as a consequence of rubbing of the disc with the shaft or rubbing of crack faces during its breathings on rotation. Due to internal damping in the shaft, a force tangential to the rotor orbit is produced, which leads to instability in the rotor-bearing system at higher speeds. Apart from this, the destabilizing effect of internal damping is extremely crucial when the system’s rotational speed approaches the supercritical speed zone. Internal damping occurs due to thermo-elasticity, grain boundary viscosity, and shrink fit. There are two internal damping, viz., viscous internal damping (dependent on frequency) and hysteretic damping (frequency-independent).
The dynamic effect of internal damping on the rotating elements is a crucial research area to maintain stability in the rotor-coupling-bearing system. The possibility of shaft whirls, induced at asynchronous rotating speeds beyond the first critical speed, was recognized and attributed to shaft internal hysteresis [108]. Therefore, destabilization of rotor systems due to internal damping is also a very prone area of research. Ehrich [109] analyzed the instability due to internal damping in rotating systems by focussing on whirling motion of the shaft. Certain whirl mode was noticed due to various damping values and conditions. Additionally, a quantitative stability criterion was established by comparing internal (destabilizing) damping forces with external (stabilizing) damping forces. It was concluded that if a shaft runs up to a speed range where internal damping induces shaft whirl, the whirl induced at a speed approximately half the rotation speed and the shaft spin speed at which instability takes place is regulated by the ratio of external friction and internal friction. However, this paper contained numerical simulation work only, so there is a need for exploration in the experimental field.
Lund [110] developed a technique to calculate the damped natural frequency (eigenvalue) of a rotor system supported on fluid-film bearings and incorporated with internal damping and aerodynamic forces. The calculated damped natural frequency provided a more realistic value as compared to the conventionally obtained critical speed. Zorzi and Nelson [111] utilized FEM and modelled a rotor system possessed with viscous internal and hysteretic damping. Both kinds of internal damping were found to be destabilizing the rotor-bearing system and influencing nonsynchronous forward precession. Apart from that, the stabilizing consequences of bearing’s damping as well as stiffness constants were also illustrated in the analysis. During modelling of the system, the bearings were considered to be identical and linear in nature. Later, in the same line, both internal damping were considered by Chen and Ku [112] to explore the whirl speed of the rotor system. The FEM model relying on Timoshenko beam concept with inclusion of centrifugal force due to rotating shaft mass was presented by them. It was shown that both the transverse shear deformation and the centrifugal force can lower the whirl speeds; however, the whirl speeds are significantly affected by the centrifugal force as the spin speed increases. Ku [113] alone did modelling of a rotor system (using FEM) associated with internal damping fault to explore its vibrational characteristics. One type of internal damping (i.e., hysteretic damping) caused destabilizing of the forward precessional modes at any rotational speed, but the other type of internal damping (i.e., viscous damping) resulted in destabilization of forward precessional modes for the rotational speed above than the system critical speed. But there is consistent stability in the backward precessional modes due to the appearance of any type of internal damping in the rotor system. Anyway, they neglected the axial motion of the rotor and bearings were considered to be undamped and isotropic. The free vibration nature of a spinning shaft with both kinds of internal damping was studied by [114]. The authors have also presented the stability behaviour of a flexible rotor system using the locus plots of the complex frequencies. However, experimental work was not performed to validate the results and analyse the stability criteria of the system under the influence of internal damping.
Forrai [115] illustrated stability nature of a symmetric rotor having isotropic damped bearings supports under the influence of internal damping. The rotatory inertia of the shaft and gyroscopic effect due to shaft and discs were also included in the developed finite element based mathematical equations. However, the vibration in the axial direction and external damping, and gravity effects were assumed to be negligible in the presented model. From the numerical investigation, it was found to have a decrement in the value of threshold speed of instability as a result of enhancement in internal hysteretic damping. Furthermore, the internal damping in a rotor system gets stabilized and destabilized in subcritical and supercritical conditions, respectively. The material of the shaft undergoes a hysteresis cycle at the frequency, where whirling of the rotor occurs. At synchronous whirling, there is no waste of energy by virtue of rotating damping as the rotor rotates like a rigid body [116]. Thereafter, Dimentberg [117] presented a numerically simulated work based on Krylov–Bogoliubov averaging method to analyse the vibrational nature of a Jeffcott rotor under the existence of randomly varying internal and external damping effects. The average value of the damping coefficient and its standard deviation were also assessed with the help of the trace of shaft whirl radius. The gyroscopic moment due to the rotating disc was neglected in this paper.
Fischer and Strackeljan [118] investigated different models of internal damping in rotor-shaft joints of a high-speed centrifuge (refer figure 10 (a)) and studied the system’s stability. Instability effects occurring in the centrifuge were demonstrated by numerically modelling the rotor system with 6-DOFs per node in the rotor. The simple described model of dry friction can be further broadened to examine the influencing parameters and micro-movements in the joints of shaft-rotor of lab centrifuges. Later, Montagnier and Hochard [119] developed the Euler-Bernoulli model of two configurations of a flexible rotor system according to the types of support. The first configuration was a rotor mounted on flexible type dissipative bearings and the second configuration was the support coming from infinitely rigid massive bearings on viscoelastic supports. These two system configurations were considered for studying the stability zone. The stability criteria for both viscous and hysteretic damping was compared and it was found that the latter model of damping gave an accurate simulated damping behaviour data as compared to the former model. Moreover, the viscoelastic supports provided comparatively more stability in the system for the case of long shafts.

Samantaray [121] analytically showed the steady-state dynamics of a 4-DOFs rotor, in which the two DOFs were translational and the other two were rotational DOFs. The disc gyroscopic effect was also taken along with internal damping effect. It was demonstrated the motor speed could not cross the stability threshold and got fixed at the threshold states. Moreover, there was a rise in the system vibration for a higher amount of power given to the motor as compared to enhancement in the motor speed. However, the shortcoming of this work was the consideration of a perfectly balanced rotor and neglecting the torsional vibration. Thereafter, Vatta and Vigliani [122] considered a dynamically balanced rotor with internal damping and derived equilibrium equations of the system. The nonlinearities resulting due to the subsequent extension and compression of the elastic shaft fibres during rotation were included in the model. Dynamic stability analysis along with the transient nature of shaft vibration for the supercritical and subcritical speeds were also presented in this article. A modal analysis technique was utilized by Chouksey et al. [123] to investigate the internal damping effect and estimate the forces originating from journal-bearing support in a flexible rotor system. The stability of different modes was studied to get a better idea of the frequency response functions of the system subjected to external excitations and also to predict the direction of the whirl of various modes.
An identification algorithm was proposed for estimating internal damping, crack and unbalance parameters in a Jeffcott rotor system supported by conventional bearings and an AMB as a controller. The AMB was kept nearby the disc and crack positions. In the mathematical modelling of the system, they neglected the gyroscopic effect due to disc and considered the isotropic nature of active magnetic bearing [124]. Later, an experimental work was done by Roy and Tiwari [125] to identify the rotating and stationary damping along with crack fault parameters in a rotor-bearing system.
Kozioł and Cupiał [126] considered a Stodola-Green rotor (i.e., a cantilevered beam with a rigid disc attached to its free end) and analysed numerically the stability behaviour of the rotor under the influence of internal damping. It was observed that the piezoelectric actuators can control the vibration and decrease the effect of internal damping. However, the static or dynamic unbalance of the disc was not considered during the development of EOMs of the system. A practical implementation of the proposed analysis and technique utilizing a low-pass filter may boost the performance of the control system. Further, the nonlinear vibrational characteristics as well as stability analysis of a rod fastening rotor incorporated with internal damping were explored by Wang et al [127]. The finite element method relying upon Timoshenko beam theory was employed for mathematical modelling of the rotor system considering the nonlinear oil-film force and force due to internal and external damping. The internal damping was found to cause low-speed attenuation and high-speed amplification in the rotor-bearing system. The research done in this paper can provide a path towards the investigation of the nonlinear dynamic nature of the rod fastening rotor, associated with other additive and multiplicative faults.
Sarmah and Tiwari [128] established a model-based identification algorithm for a two-degrees-of-freedom Jeffcott rotor system incorporated with internal damping, crack and bow faults as well as AMB technology. AMB was installed near the middle disc position to reduce vibration of the rotor. The concept of full spectrum analysis was used for exhibiting the vibrational nature of faulty rotor. The frequency domain displacement and AMB current data were given as input in the developed identification equation to obtain the values of various system and faults parameters. These parameters included unbalance eccentricity and phase, crack additive stiffness, bow magnitude and orientation as well as values of internal and external damping. Experimental investigation was also carried out for validating the proposed numerical model. The identification method was noticed to be quite effective and robust. In the concluding remarks, it was stated that the coupling misalignment effect can also be included in the rotor modelling along with earlier available faults to show an effect in multiple harmonics of rotor. Apart from this, the dynamic interaction between residual shaft bows and misalignment faults can also be explored in the future.
In this section, the literature survey has been presented on the internal damping (i.e., rubbing among the rotating components) in the rotor system. The primary focus was made on the stability analysis, shaft’s synchronous and asynchronous whirling motion and identification of internal damping. Researchers have presented the dynamic analysis in simple rotor models, high-speed centrifuges, and Stodola-Green rotor models under the effect of internal damping. However, the mathematical model of the rotor systems was developed with various assumptions. Very less experimental works have been performed in the area of internal damping. More efforts can be given in the field of the nonlinear dynamic nature of the rotor system incorporated with internal damping and consideration of nonlinearity arising from supported bearings.
2.5 Shaft bow fault
As a result of outrageous heat generation as well as shaft weight for a longer period, there is a bow in the shaft. For the shaft rotational speed below the critical speed, the bow effect in the rotor gets increased, which may result in rub phenomena between stationary and rotating elements. This rub between rotor and stator causes ruinous failure and accidents, which are going to be discussed in the subsequent section.
Meacham et al [129] explored a complex modal balancing technique for a linear flexible rotor system incorporating the effect of residual shaft bow. To acquire the system model parameters, a mathematical model was developed, correlating the balance corrections and measured responses. Three balancing strategies were discussed for the rotor balancing in which the first was treating unbalance and bow as an equivalent unbalance, the second was subtracting low-speed runout from the response at the balance speed, and the last was critical speed balancing using data at a neighbouring speed. The balancing procedures for two real applications were applied, in which the first was a single-spool gas turbine with numerically simulated data, and the second was an operating steam turbine-generator set. The discrete unbalances resulting from rigid discs were assumed instead of the flexible shaft residual unbalances. Rao and Sharma [130] presented the analytical results for the Jeffcott bowed rotor and validated the theoretical results with experimental ones. The influence of rotor bow on the dynamic behaviour was studied in this paper. An experiment was performed with bow phase equal to 1800. For this bow phase, the self-balancing speed and phase jump was obtained from experiment. In this work, the gyroscopic effect due to disc was neglected in the system modelling.
Nelson [131] proposed a procedure for balancing a multi-degrees-of-freedom unbalanced and bowed flexible rotor system. The support mechanisms were assumed to be linear and isotropic. The rotor lateral displacements were written considering the complex translational as well as rotational DOFs at all nodes. The presented mathematical model also utilized experimental data for estimating corrective unbalance vectors associated with each unbalance method. The technique was observed to be highly effective for balancing the system under the bow effect. Later, both numerical and experimental investigations were done to identify the location and severity of a generator thermal bow based on model based diagnostic technique [132]. Basic statistical methods were used to check the accuracy of the bow identification. However, the considered faulty rotor-bearing system was assumed to be linear and time-invariant.
The viscoelastic supports can be used for mounting the geared-rotor system, which helps in suppressing the fault induced vibration. With the same viewpoint, the vibrational nature of a geared rotor-viscoelastic bearings system was examined by Kang et al [120] under the influence of the bow effect as depicted in figure 10(b). The mass and stiffness constants of viscoelastic material were utilized for mathematical modelling of the force due to supported bearings. While doing vibrational analysis, the gear eccentricity effect and excitations from transmission error of the gear were also considered in the model. The results showed that the system's 1st critical speed was mostly governed by viscoelastic supports stiffness. Moreover, one more mode was excited due to the existence of the transmission error, and the frequency of resonance was equal to the ratio of original critical speed and number of gear teeth. However, in the paper, there was an assumption of considering the linear nature of the contacts of the viscoelastic supports.
Song et al [133] presented the effect of bow on the longitudinal response using both the numerical simulation and experiment. It was observed from the simulation that the vibration in the rotor can be severely affected due to the shaft bow for less values of disc eccentricity and damping ratio. Moreover, the displacement responses were gathered experimentally from a test rig consisting of three-span flexible shafts with two discs. Further, the wavelet transform and principal component analysis techniques were exploited to process the collected test signals and determine the characteristics of the bow fault. The experimental and simulation results were consistent in this article. However, there is a need for more investigation into different methods of accurately predicting machine responses for multiple values of residual shaft bow and at higher operating speeds. Thereafter, for analysing the vibration signals in a bowed shaft-bearing system, an order analysis technique was presented by Mogal and Lalwani [134]. Both amount and location of the bend in the shaft were obtained using this technique. An order analysis made an accurate evaluation of amplitude and phase at a machine rotational frequency. The difference between the phase in the axial direction at the drive and non-drive bearing ends confirmed bow in the shaft. Experiment was successfully conducted, which proved that the proposed scheme for fault identification was an effective technique for the bent shaft. In the present study, the disc was available at the shaft’s middle location. Hence, the analysis can be extended for a flexible bowed shaft with offset discs considering the gyroscopic effects.
Pereira et al [135] provided the mathematical modelling of the shaft bow utilizing the finite element of curved beam, in which the rotating inertia forces were not neglected in the dynamic system response. The resultant shaft displacement was found to have overlapping effects from the external effort and the residual bowing shaft. Lastly, it was proposed to examine in future how the bowing shaft interferes with the dynamics models and enhances the approach of the bow curve. After that, both numerical and experimental investigations were done by Chatterton et al [136] to study the vibrational nature of a generator originated from the rotor thermal sensitivity. The developed model was based on a linear relationship of response with an independent variable. Further, Shin et al [22] explored the vibrational dynamics of a rotor having two flexure pivot bearing supports, in which the bow fault was induced in the journal due to asymmetric temperature distribution (also called as Morton effect). Enhancement in the amplitudes of vibration was observed with the time-varying phase. However, the flexibility of housing can be considered in the future for more improvement in the presented model and analysis.
Afterwards, Gautam and Tiwari [137] considered residual bow in a misaligned shaft and analysed the rotor displacement and controlling current responses. The system was considered to be like a rotor-train type, in which there were two offset discs and two coupled rotors (each to be connected by flexible coupling and supported by rolling element bearings at the ends). AMB was used as a vibration controller unit installed at the middle of one rotating shaft. The weight dominance concept was assumed to reduce the complexity nature of mathematical equations and build the linear relationship between the slopes at coupling and transverse displacement of discs. Various time domain responses, frequency domain responses and orbital responses were plotted to explore the rotor motion. It was found that the bow in shaft directly affected the 1× harmonics with high amount of vibration amplitude. Moreover, the amplitude of vibration was quite dominant over vibration due to the misalignment force.
Recently, Han et al [138] developed equations of motion of a rotor system having an initial bow and supported by squeeze film dampers using the Lagrange method. The nonlinear forces coming from the fluid-film of the squeeze-film damper as well as the cubic nonlinearity of the system were considered as sources of nonlinearity in the rotor systems. Equations of motion were solved utilizing the combined techniques of the classical incremental harmonic balance (IHB) and the modified IHB methods. Moreover, the stability analysis of the solutions of rotor systems was performed employing the Floquet theory. Frequency-response curves, time histories, Poincare´ sections, and disk-centered whirl orbits according to the change of system parameters were also constructed. The calculated results were a good sign for studying the response characteristics of rotor systems with an initial bow.
This section elaborates on numerical and experimental investigations for the identification of the shaft bow in rotor systems. The effect of the bow on the longitudinal and transverse responses of the vibrating machines was also studied in various literature. Even in the area of rotor-gear-viscoelastic supports system, the researchers have explored themselves in studying the analysis of bowed shafts, gear eccentricity, and transmission error effects. In future work, the nonlinearity nature of viscoelastic supports in gear mechanisms and other rotor systems can be explored at higher speeds. The rotor model incorporated with the residual bow in the shaft can be made more accurate and complex by considering the time-variant system, flexibility of housing, and shaft as well as discs gyroscopic moments.
2.6 Rub between rotor and stator
The rub is initiated in a rotating machine through the contact of the rotor with stator due to a reduction in clearance between them while operating. As the contact leads to high impact force and excessive amplitudes of vibration, so there is a chance of catastrophic failure of the system. Thus, the rotor-to-stator rub can be hazardous in rotating machinery, such as compressors and turbines. Rub may also occur as a consequence of other faults, such as mass unbalance, rotor misalignment, mechanical looseness of components, and improper installation of bearing and rotor components. The rotor-to-stator rub contains various physical phenomena, i.e. the impact, frictional behaviour among the two contacting rotating and stationary elements and stiffness variation. In the rub case, the system stiffness may increase due to the additional involvement of contact stiffness.
Rotor-to-stator rub may usually take place in two ways (i) Partial rub: The partial rub phenomenon takes place when there is a temporary contact between rotor and stator during some interval of precession. During this phenomenon, the contact point starts to behave like a new dry non-lubricated bearing, which supports the rotor. Moreover, there is a modification in the dynamic aspects of the system. Thus, as the partial rub continues, leads to full rub phenomena at a high speed. (ii) Full rub: The full rub phenomenon takes place when the rotor touches the stator (for example, a seal) throughout its entire motion. The rotor bounces its way all around its orbit, which produces a large unbalance response in the rotor.
Chu and Zhang [139] explored the vibrational dynamics of a rotor system with rub impact and journal bearings support. A non-linear mathematical model was applied with piecewise line stiffness for this purpose. The rotational speed, damping coefficient and unbalance parameters were utilized as control factors to perceive several forms of quasi-periodic, periodic, and chaotic vibrations. The particular vibrational signatures are observed to be extremely helpful in diagnosing the rotor-to-stator rub. Further, the non-linear vibration response of a Jeffcott rotor was presented, which was induced due to rubbing phenomena. Nevertheless, experimental investigations were not performed to validate the responses acquired from numerical simulation. A numerical technique was exploited for solving the differential equations of motion and obtaining quantitative result. Through this, stable, periodic, and chaotic motion with doubling and grazing bifurcation was noticed at the higher spin speed of the rotor [140].
Al-bedoor [141] presented coupled translational and torsional vibrations of a rotor system having two fluid bearing supports and rotor-to-stator rubbing phenomenon (refer figure 11 (a)). Appropriate coupling between the unbalanced rotor translational and torsional vibrations was done using two successive transformation matrices. The elastic impact-contact idealization technique was utilized for modelling the rubbing condition. The orbital displacement response was found to be more irregular in shape due to consideration of the torsional flexibility of the rotor, in comparison with only the rotor lateral deflection. Moreover, a split in resonance was observed with the incorporation of the torsional flexibility in the system. It was also mentioned that the reduction in the split in resonance and decrement in the number of rotor-to-stator contacts can also occur by considering the non-zero bearing cross-coupling coefficients. But only theoretical and numerical works were presented in this paper. At last, it was suggested to implement the proposed method and analysis in larger-scale rotor models. Later, Bachschmid et al [142] utilized a least-square fitting technique for identifying rub and unbalance in a turbogenerator based on the development of complete rotor system model. In the first case, the unbalance fault was identified in a large turbogenerator, whereas the rotor-stator rub was identified in the sealing in the second case. The developed method was quite helpful and efficient for the detection of the faults. However, the non-linear oil film effects in the fluid film journal bearings were neglected during modelling of the rotor-bearing system.

Further, a rigid shaft linked with a disk in the mid-span and supported on two flexible oil-film journal bearings was examined by Chang-Jian and Chen [144] to present its vibrational behaviour under the impact of rotor-stator rub. There were several assumptions made for mathematical modelling of the rotor system, such as the negligence of gyroscopic moment and vibrations in the axial as well as torsional directions, the short time interval during rub, and identical nature of bearings and their dynamic coefficients. A Runge-Kutta technique was employed to get the solution of equations of motion. Afterwards, the displacement orbit response, Poincare’ maps, and power spectra of the rotor and bearing centres were plotted for analysing the faulty nature of rotor vibration. It was found that the trajectory of the centre of the rotor or supported bearing can evade the unwanted nature with variation in system parameters up to some desired values. Abuzaid et al [145] presented both analytical and experimental investigations to understand the rotor motion under the influence of the partial rotor-to-stator rub phenomenon. The rubbing fault caused the measured vibrational response to change or distort into a flattened segment in the waveform. They also identified the severity of rub experimentally in which the light rubbing phenomenon was indicated by harmonics at 1×, 2×, and 3× shaft angular frequency, whereas the severe rubbing phenomenon was marked by subharmonics at 1/3 and 2/3 of the frequency. Moreover, there was an increment in the resonance frequency due to the stiffening effect of the rotor rub with the stator. The analytical results were observed to be matching from the experimental results. However, future work is needed to yield the relationship of rubbing contact angle with other parameters of the system, i.e. the stator stiffness and rotor speed.
Yungong et al [146] developed a feature extraction method for diagnosing the rotor-to-stator rub based on the measured vibration response and identified dynamic load. It was found that the rubbing fault can be represented more effectively by detecting stator vibration signals than that of the rotor. Results acquired from the discussed method revealed good agreement with experimental data. Ma et al [147] explored numerically the non-linear vibrational behaviour of a rotor system having two offset discs and under the two conditions of rotor-to-stator rub impact. The first condition was fixed-point rub-impact, in which the rotor is in contact with the stator at a fixed point once per cycle of shaft rotation. This was possible when the stiffness of the stator was higher as compared to the rotor system or bumps resulting from the stator deformation. The second condition was local arc rub-impact. Coulomb type friction model as well as piecewise linear spring model were utilized for describing the rotor contact with the stator. Numerical simulation was done to analyse the system vibration responses. There was a difference in the combination frequency components and continuous spectra under both the rub-impact conditions. However, the rotor movement was not considered in the axial and torsional directions. Further, the supported bearings were modelled using linear damping and stiffness constants. Afterwards, Huang [148] presented the vibrational nature of a rotor-coupling-bearing system having multiple faults, such as the imbalance, rub impact and transverse crack using a numerical method. The effect of the crack depth and its angle was studied on the vibrational motion of the coupled system. It was perceived that as there is an enhancement in rotating speed, the system tends to have more unstable and complex behaviour.
Liang et al [149] presented a method for analysing the nonlinear responses in the frequency domain caused due to rotor-to-stator rub-impact. The method involved the nonlinear output frequency response functions (NOFRFs) based on Kullback-Leibler (KL) divergence. The work done in this paper could detect efficiently the rubbing (rotor-stator) fault in a rotor system. In the end, it was advised to study the influence of the system nonlinearities on each order of refined NOFRFs weighted contribution rate derived from KL divergence. Moreover, the efficacy of the developed index in detecting other fault types of the rotor system, as well as faults of other nonlinear engineering structures need to be further researched. Later, the nonlinear vibration responses of a two-spool aero-engine rotor system were explored under multi-disk rub-impact [150]. The rotor model consisted of multi-stage compressors as well as single-stage turbines which had undergone rubbing phenomena when its vibrational displacements exceeded the clearance. However, during the modelling of the aero-engine model, the bladed disks were considered to be rigid disks. The pedestals were also modelled as linear form.
Sozinando et al [151] studied the effect of incompressible as well as inviscid fluid in a vertical rotor system. The whole system was submerged in the fluid and incorporated with rotor-to-stator fault. Experimental investigation was also presented for validating the theoretical results obtained using the wavelet synchrosqueezing transformation (WSST) technique. This technique was able to discretise the rotor vibrational signal in the supercritical speed zone into various supercomponents. The proposed theoretical technique and results were noticed to be consistent with experimental results. However, the technique can be extended for addressing the continuous degrading of faults of a vertical rotor in a fluid type system. Apart from this, other kinds of data, such as those collected using acoustic data, can also be considered in future work. Furthermore, Paiva et al [152] presented numerical simulation work of a 4-DOFs Jeffcott rotor system with non-smooth rotor-to-stator contact. Based on type of contact, the contact nature was classified into three dynamical modes such as no contact, intermittent contact or full contact. Then, a multiparametric analysis was used to classify the dynamical response into periodic or chaotic or hyperchaotic manners for large magnitude of friction coefficient. Among the other two contact type, intermittent contact was observed to be the most effective one, which exhibited rich and complex behaviours. However, during the development of mathematical model, the contact between rotor and stator was assumed to be point type, but not surface type contact. Besides this, the wear layer underwent only normal radial strain.
In this section, the research done in the area of rotor-to-stator rub impact in rotating machinery has been explored through several published journal and conference papers. Nonlinear nature of the rotor displacement was studied using various forms of response signals, such as the quasi-periodic, periodic, and chaotic vibrations, orbit responses, Poincare maps, power spectra, and bifurcation diagrams. However, in most of the papers, the rotor system’s mathematical modelling under the rotor-to-stator rub impact was developed for simple rotor systems with multiple assumptions, such as neglecting gyroscopic effects, axial and torsional vibrations, and short time interval during rub, and identical nature of bearings and their dynamic coefficients. Moreover, the influence of the system nonlinearities on each order of improved nonlinear output frequency response functions can be further studied based on Kullback-Leibler divergence. The analysis for rub impact can be exposed for the flexible and complex dual rotor and turbogenerator systems.
2.7 Mechanical looseness
Mechanical looseness is also a frequent fault, which exist in the rotor systems due to bad quality and inappropriate installation, and extreme vibration for a long time. The non-linear dynamic nature of a rotor system mounted on two oil film journal bearings was presented by Chu and Tang [153], in which the pedestal looseness was considered at one of the bearing support. The periodic responses from the developed equations were obtained using the 4th order Runge-Kutta and shooting methods. Floquet theory was exploited to investigate the system’s stability. By considering the rotor angular speed as well as unbalance as the control parameters, various kinds of quasi-periodic, periodic and chaotic vibrations were perceived. The shortcoming of this article was that the gyroscopic effect was neglected due to the rigid disc and the pedestal looseness was assumed at one bearing only. Wu et al [154] proposed the Hilbert–Huang transform (HHT) technique for experimentally diagnosing and detecting the looseness faults in a rotor system. Through the assistance of the similarities between the information-contained marginal Hilbert spectra, the mechanical looseness faults at distinct parts of the machine were diagnosed in the system. A rotor test rig set up driven by a motor at 1500 rpm constant rotational speed was taken for illustrating the looseness faults at several mechanical components. Experimental results demonstrated that the developed diagnosis technique was able to categorize the discrepancy amongst the marginal Hilbert spectra distributions and hence identify the kind of looseness faults in rotating machinery. In future work, the developed technique can be applied for diagnosing screws looseness in a rotor system incorporated with two or more discs and rotating at high speeds.
The FEM modelling of a rotor system with two offset discs was performed by Ma et al [155] under two distinct loading states relying on API Standard 617 as well as the spectrum cascades. The orbit plots and Poincaré maps were utilized for examining the dynamic effect of looseness clearance, non-loosened bolts stiffness, and rotational speed. Under these two loading conditions, several forms of bifurcation diagram, quasi-periodic, periodic, and chaotic motions were noticed in the responses. However, for efficiently simulating the vibrational features, the modelling of the system was based on assumptions of identical oil-film bearings with linear damping and stiffness parameters. The dynamic influence of the pedestal looseness on the bearing characteristics was also ignored. Later, Reddy and Sekhar [156] applied artificial neural networks (ANN) by two types of techniques, i.e. statistical features and amplitude in the frequency domain in a simple rotor system for the identification of looseness and imbalance faults. The rotor in the test rig was comprised of a shaft with a disc at the midspan and operated at a constant speed. After that, the vibration data was collected by simulating various rotor unbalance states and loosening the bolts of pedestal part. Different statistical features as well as amplitudes in the frequency domain were taken out separately from the vibration response data and further given as input into the neural network. The statistical features method was observed to be more effective and provided good results as compared to frequency domain amplitudes. The discussed technique can be explored for fault identification in a rotor system with one or multiple discs at offset position or more complex rotors. Moreover, the study can be extended to other faults identification individually or simultaneously.
In the review paper, Cao et al [157] discussed the causes for various looseness phenomena in mechanical systems such as foundation looseness, pedestal looseness and component match looseness. Other six kinds of looseness incorporating single looseness, looseness coupled with rub-impact, looseness coupled with crack, looseness at two end-supports, looseness of rotor system with slowly varying mass, and looseness of double-span rotor system were elaborated in the aspects of dynamics modelling, solution method and their nonlinear dynamic characteristics. Experiments conducted in looseness fault were also explained by them. Wang et al [158] used numerical integration methods to produce asynchronous vibration response phenomena as a result of looseness fault. For modelling of the rotor system, a single degree-of-freedom lumped mass model as well as rotor-casing model of a practical engine was demonstrated along with two looseness fault models. The asynchronous responses were generated due to the relationship among the changing period of stiffness and rotational speed. The frequency multiplication and excitation of the natural frequency were observed at certain speeds for equal values of the changing period of stiffness and spin speed of the rotor. However, to incorporate the strong nonlinearity in the system, nonlinearity due to rolling element bearings can be considered along with nonlinearity caused by looseness fault.
The fit looseness fault in the rotor-bearing system can be originated due to variation in temperature, the problem of assembly error, and vibration for a long period. This fault may also result in accelerating the mechanical wear phenomenon. Hence, Wang et al [143] presented research work on bearing fit looseness fault among outer ring as well as pedestal. The rotor-bearing-coupling dynamic model was considered to have interaction between the outer ring of bearing as well as pedestal. The physical model of fit looseness fault is depicted in figure 11(b). FEM modelling was done for the rotor, whereas the lumped mass model was explored for bearing outer ring and pedestal. The numerical integration method was utilized for generating the system’s response. The vibration arising from looseness fault was able to get minimised by incrementing the tightening torque. The acceleration response of the pedestal exhibited multiple frequencies and periodic impact behaviour after lowering the noise level. Moreover, experiment works were performed for validating the efficacy of the developed technique. For modelling the faulty rotor-bearing system, the friction forces between the bearing outer ring and pedestal were assumed to be equivalent to viscous damping forces.
A three discs-Jeffcott rotor-bearing system was considered and the response characteristics have been numerically analysed under the influence of fit looseness fault [159]. For controlling the vibration originating from the faulty rotor system, a squeeze-film damper was employed. It was observed that this damper can minimise very efficiently the nonlinear vibration signals of the system. Still, various assumptions were made for analysing the dynamic interaction between bearing housing and its outer ring. The outer ring of bearing was considered harder than the housing so that the outer ring can be taken as a mass unit. Nonlinearity resulting from rolling element bearings was also neglected while modelling the system. Lin et al [160] established a model for pedestal looseness in a rotor system consisting of two discs and supported bearings. The system was also incorporated with labyrinth seals foundation and looseness at sliding oil-film bearing. Afterwards, the dynamic nature of the system was examined with two different working conditions, in which the first condition was in-phase unbalance while the second condition was out-of-phase unbalance. In the first and second cases, the eccentricity of both discs was in the same and reverse directions, respectively. The non-linear vibration features were analysed using orbital plots, Poincaré maps, spectrum cascade, and vibration waveforms under the effect of shaft angular frequency, eccentricity, looseness gap, and mass of the support. In comparison to the first condition, the second condition was observed to cause looseness in the bearings. Extensive careful consideration was required in the design of the rotor system, as the cost may increase if the extensive mass of the bearing is considered to prevent the looseness fault to a particular extent.
Both experimental as well as numerical investigations were presented to explore the vibration mechanism of a rotor system linked with multiple discs [161]. Lagrange principle was employed to establish the system’s model with the inclusion of gyroscopic moment, nonlinear cubic supporting stiffness and pedestal looseness fault. Further, the EOMs of the considered system were solved utilizing the harmonic balance and Runge-Kutta methods. As compared to Runge-Kutta method, the accuracy of the harmonic balance method was justified. The different types of response plots such as vibration waveform, Poincaré map, time history, phase portrait and bifurcation diagram were presented for discussing the nonlinearity effects resulting from the support and looseness fault individually as well as in a combined way. The results obtained from numerical simulation were excellently verified with the experimental works. However, the nonlinearity resulting from rolling element bearings was neglected while modelling the rotor system. Therefore, more investigations can be done in further works for the proposed rotor-bearing system with consideration of strongly nonlinear support.
In the year 2023, Xingrong et al [162] have published a paper related to experimentation on a simple rotor system having bolt looseness in the front squirrel cage supporting structure. The mathematical model of bolt looseness was done using generalized Dahl friction model, which followed Mesing hypothesis. The shaft orbital responses of the system were analysed for three different cases, in which the first case was considering faultless linear rotor system. The second and third cases were, respectively, consideration of nonlinear system having bolt looseness without gyroscopic effect and with gyroscopic effect. Out of these cases, the third case has shown strong influence on the harmonic components in the vibrational dynamic signals. Afterwards, Zhao et al [163] proposed a data-driven diagnosis technique for timely monitoring the occurrence as well as deterioration of the pedestal looseness. A finite element model of a rotor-bearing system was developed, in which the piecewise linear function was employed to characterize the pedestal looseness fault. The Newmark-β method was used to solve the established equations of motion. The nonlinear autoregressive with exogenous inputs (NARX) models under distinct looseness levels were identified by considering the unbalanced force as the input and the vibration response as the output. Results generated by solving theoretical equations have exhibited that the sensitive feature indicator presented in the paper was more efficient and effective, as compared to the conventional type indicator. For future work, the application of data-driven diagnostic methods can be explored for quantitatively analysing various faults and detecting the location of damage to engineering structures.
The present section covers the investigations done in the field of mechanical looseness, such as the foundation looseness, pedestal looseness and component match looseness in the rotor-bearing system. In most of the studies, the nonlinearity resulting from the rolling element bearing was neglected and the disc was assumed to be present in the mid-span of the shaft. Hence, future investigation can be done for a complex rotor-coupling-bearing system with multiple discs at offset positions and considering the strong nonlinearity of the supports. The effect of pedestal looseness was only explored for the system associated with conventional bearings. Therefore, the research work can also be done for the mechanical looseness in the rotor-active magnetic bearing system operating at higher speeds.
3 Review on different fault diagnosis techniques in the rotating machinery
Condition monitoring of the rotor systems has been a crucial task for research people, engineers and skilled professionals in industries. It is mainly required to enhance the structural reliability and productivity of manufacturing plants in a real time. A flow chart is given in figure 12, which shows the need of condition monitoring in rotating machines. There are mainly two categories of condition monitoring techniques i.e., signal based technique and model based technique. Signal based fault identification approach depends on extraction of signals (vibration, current, etc.) or symptoms from the rotor systems, which may carry details about faults of interest. The symptoms are either directly or after proper modifications used for the fault detection and diagnosis.

Flow chart representing the need of condition monitoring [164].
Frank [165] discussed that the usual symptoms are the magnitudes of the time domain signals measured from the system, arithmetic or root mean square values, statistical moments of vibrational amplitude distribution, measure of signal’s power content relative to frequency, correlation coefficients, etc. The formula for calculating the overall root mean square (RMS) value was given by Zhuge [166], which is presented as follows:
In equation (1), BW represents the noise power bandwidth of the signal, the analysis frequency band is denoted by f and fs is the sampling frequency band. The next section discusses the research work done in the field of signal based approach by going through multiple journal and conference-published papers and books.
3.1 Review on signal based fault detection and diagnosis methods
Doebling et al. [167] presented a review on vibration signal based techniques for detection, characterisation, as well as identification of damage in structural and mechanical systems. The damage in the system would cause changes in the measured vibration responses. The identification methods were categorised using several criterion, i.e., the extent of damage detection imparted, model-based versus non-model-based techniques and linear versus nonlinear techniques. The change in physical characteristics of the structure, such as the mass, stiffness and damping caused noticeable variation in the modal properties (i.e., resonant frequencies, mode shapes, as well as modal damping). A summary of major issues for recent research in the field of vibration-based structural damage identification and health monitoring was also addressed in this paper. Further, more surveys on critical issues in vibration signals based fault diagnostics and prognostics were presented by Giurgiutiu [168]. The monitoring can be allowed to observe timely the fault propagation in the system. Depending on the propagation of faults, the prognostics of the failure moment and the remaining life period can be executed. In this review paper, various methods for fault diagnostics and prognostics were also discussed.
Carden and Fanning [169] described the research work in the area of vibration based health monitoring of structural engineering applications. The different methods for damage detection, such as utilizing the measurement of natural frequencies, structure mode shapes, operational deflection shapes, modal strain energy, dynamically calculated flexibility matrix based techniques, frequency response function based techniques, and neural network based techniques were discussed in this paper. However, in the literature, the survey on methods utilizing sensors for the identification of damage in structures was not included. Later, the benefits of the wavelet transform for fault diagnosis were summarized, along with a discussion of the prospects of wavelet analysis in solving non-linear problems [170].
Nandi et al [171] overviewed on the different types of faults and their detection techniques in electrical machines. These faults include the bearing faults, stator faults, broken rotor bar as well as end ring faults, bent shaft causing serious damage to stator core as well as windings, initial air gap and dynamic air gap eccentricity related faults. The distinct types of techniques were also discussed for the fault detection relying on axial flux-based measurements, vibrational response analysis, and transient current as well as voltage monitoring. Moreover, it has been found from various literatures that the motor-current signature analysis is an extremely efficient approach for diagnosing faults in induction machines. In the same direction, a survey on latest research in wind turbine health monitoring as well as fault identification was described by Lu et al [172]. In this study, it was accomplished that the model-based fault diagnosis technique is the most effective and efficient method from sub-system to whole system levels. Moreover, focus was also given to an appropriate gray-box modeling approach for fault identification, suggesting that more studies can be done on this as future work.
Do and Chong [173] developed a vibration signal-based fault detection and diagnosis technique applicable in induction motors. The scale invariant feature transform algorithm was utilized for generating the fault symptoms in the fault detection process. Then, the faulty symptoms were used in the pattern classification technique for the fault diagnosis process. From their results, it was concluded that the proposed technique yielded high level of accuracy and better operation than the wavelet-variance based and wavelet-cross correlation based approaches. Further, a literature review on health monitoring as well as fault diagnosis of planetary gearboxes was summarized by Lei et al [174], in terms of methodologies, such as the modelling, signal processing, and intelligent diagnosis. It was claimed that an enormous amount of work has been done in the field of fixed-axis gear boxes, but less work has been done in planetary gear boxes. The workings, functions and difference between planetary and fixed-axis gear boxes were also described in this paper. At last, the critical issues observed in the research area of gear boxes were reviewed, and the scope for future work was outlined.
The modelling and diagnosis issues, as well as challenges in fault detection of rotating electrical machines by two signals based solutions, i.e., current signature and vibration signature were addressed by Giantomassi et al [175]. Several experimentations were also carried out on real motors aiming to illustrate the efficacy of the developed methodologies. The results obtained by the authors manifested that the signal based solutions were capable of modelling the fault dynamics and identify the motor conditions (i.e. healthy and faulty). Further, the model-based and signal-based fault diagnosis approaches were reviewed along with their applications in several industries [176]. The survey was done on the topics, such as the deterministic and stochastic fault diagnosis techniques, discrete and hybrid system diagnosis techniques, as well as networked and distributed system diagnosis methods in the model-based approach. In signal-based approach, the review was summarized on the time domain-based, frequency domain-based, and time-frequency signal-based methods. In the continuation of this review, a survey on knowledge-based fault diagnosis and hybrid as well as active fault diagnosis can be done in future work.
Uddin and Rahman [7] performed experimental investigations and utilized time as well as frequency based motor current signal and vibration signal for online detection of bow fault in the rotor-induction motor system. For analysis of the frequency domain signal, a fast Fourier transform and Hilbert transform were employed. It was observed that the vibration signal was more appropriate and informative in the detection of fault. In future, the proposed technique can be exploited for other faults i.e. rotor with unbalance fault, damaged rotor under distinct states of load. Further, De Azevedo et al [177] presented a state-of-the-art review on bearing failure and its effect in large-scale wind turbines. Various technical, financial and operational challenges were discussed in the area of health monitoring of wind turbines. In the end, it was felt that more efforts could be made to describe the financial and practical challenges as well as aspects for the rapid and safe implementation of condition monitoring in wind turbines.
Wu et al [178] elaborated a novel technique for the fault detection, isolation and tolerance of current sensors for permanent magnet synchronous machine drive systems. This method was based on practicable estimation of the current amplitude, which required the knowledge of three phase currents and motor-shaft position, in place of an accurate system model having explicit parameters. Moreover, experiments were carried out to verify the usefulness and trustworthiness of the discussed technique. In the same year, Salameh et al [179] published a review paper describing the various methods utilized in gearbox health monitoring of wind turbines. Difficulties and future directions were also elaborated in order to focus on different condition monitoring techniques in systems. The drawback of this paper was that the descriptions of health monitoring methods used in the other components of wind turbines such as bearings, drive shafts, generators, etc., were not included.
Fault diagnosis is a challenging task in hydraulic systems due to nonlinear time variant signals, as well as a complex vibration transmission mechanism arising from various faults. Accordingly, Dai et al [180] examined and summarized the foremost technologies and research level of fault diagnosis in a hydraulic system. The main issues perceived in the application of deep neural networks were also elaborated to understand a hydraulic fault diagnosis as well as certain feasible solutions. Thereafter, a review of fault detection and diagnosis (FDD) techniques for various industrial activities was presented by Park et al [181]. It was found that there are a lot of complexities and hassles in the execution of the FDD methods for practical industries as a result of the unique features such as multivariate statistics, non-stationary time series data, non-linearity data, correlation, and multimodality.
Gangsar and Tiwari [182] summarized the existing research and development in the area of electrical and mechanical fault identification of induction motors. The braking of rotor bars, stator winding faults or armature faults, bearing faults, and air-gap eccentricity related faults were under the classification of faults in induction motors. The condition monitoring technique was based on analysing the vibration and current signals (time and spectral) measured from different faulty induction motors. A review on advancements in the artificial intelligence-based fault diagnosis including the popular approaches was also given in this article. The review of system signals, and traditional and modern signal processing approaches for fault diagnostics of induction motors have also been concisely included in this review paper. However, this review paper was limited to discussions on identification in induction motor only. Hence, efforts can be given in summarizing the works performed in the combined rotating systems such as induction motor attached with a pump, induction motor linked with a gearbox, induction motor integrated with a generator, etc. In the same field of FDD, an overview of existing research and challenges for future fault diagnosis methods were briefly demonstrated by Abid et al [183]. It was claimed that the hybrid FDD techniques have huge opportunity in the coming future practical applications in comparison to conventional FDD methods. The multiple model banks and multi-stage filtering techniques, which integrates state and parameter estimation methods as well as signal processing approaches, fall into the category of the hybrid FDD techniques.
An extensive review on damage detection methods relying on non-machine learning and machine learning approaches in wind turbine system was presented by Kumar et al [184]. Several signal processing approaches consisting of time-domain and frequency-domain analyses, joint time-frequency techniques, entropy-based damage identification, supervisory control and data acquisition were also emphasized and discussed in this paper. In the end, it was conveyed that the online monitoring of wind turbines can be done consistently and in a reliable manner with the advancement in communication technology. Tiboni et al [185] explored the comprehensive literature survey on the multiple phases of vibration signal-based health monitoring of rotating machines. The reliability and effectiveness of the distinct signal processing methods, feature selection, as well as diagnosis were highlighted in this paper. It was suggested that more advanced and innovative diagnostic procedures based on artificial intelligence and machine learning can be proposed in future for fault detection and diagnosis.
In recent publications, Mutra et al. [186] have presented signal based fault parameters identification technique in a rotor-roller bearing system. The vibrational dynamics of the system was investigated under several operating conditions. This included the inner race fault, roller fault, as well as the outer race fault. Empirical mode decomposition scheme was utilized to estimate the intrinsic modal functions for the time domain signals. The counter propagation neural network model and adaptive neuro-fuzzy inference model were also proposed, through which the roller faults can be predicted by 100%, the inner race fault by 87.5%, and the outer race fault by 96%. It was also observed that the inner race fault and the roller fault have more influence on the system’s response, as compared to the outer race fault.
Similarly, a comparison between acoustic signal based fault detection model and image classification model was proposed in the paper [187], to detect various mechanical faults in induction motors. The faults included breakage in the shaft, misalignment, mounting bolt looseness, and cooling fan issues. Further, a review on vibration and acoustic signal based fault detection method was presented by Alharbi et al [188] to detect faults in belt conveyor idler system. Various steps involved in the method such as data collection, signal processing, feature extraction and selection, and machine learning model construction were also described in the review paper. At last, for future work, it was suggested to do investigations on multi-information fusion and multi-model approaches for the detection of fault.
Other than published review and research papers on signal based fault detection and diagnosis technique, there are a lot of books available on the topic of condition monitoring of rotating machinery [189,190,191,192,193,194,195]. The industrial approaches, identification techniques and methodologies in mechanical as well as electrical systems are described in these books. The applications of condition monitoring in industry, aerospace, automotive working fields, centrifugal pumps and wind turbine are also explored in the books written by the authors [196,197,198,199,200,201,202].
As compared to signal based fault identification technique, the model based technique is quite useful and powerful. This technique depends on the usefulness of the mathematical models of the system associated with the individual or combined faults [203]. Here, the system’s dynamic model is utilized to generate estimates of measured as well as unmeasured variables of the system. Further, the estimates of the measured variables are made in comparison with the actual measurements, thereby generating the error signals known as residuals [204, 205]. Based on residual generations, there are two types of the model based approach i.e., analytical based approach (includes parity space approach, observer based approach and parameter estimation approach) and knowledge-based approach (includes symptom based approach and qualitative based approach) [206]. The summarized review of model based identification of various multiplicative faults is already presented in the paper [207].
3.2 Review on fault diagnosis using artificial intelligence methods
With the prompt progress and advancement in science and technology, mechanical equipment such as rotating machines are becoming extremely functional and complex in recent industry. Accordingly, the fault diagnosis of rotor systems becomes the most critical aspect in system design and maintenance. Now a days, artificial intelligence (AI) methods (such as k-Nearest neighbour (k-NN), Naive Bayes classifier (NBC), support vector machine (SVM), artificial neural network (ANN), and deep learning method, etc.) have been an important part of condition monitoring of mechanical as well as electrical machines, due to its rapid computational and robust performance, and high accuracy. It also reduces the dependence on experienced personnel with expert knowledge.
The support vector machine (SVM) algorithms concept was used by Gangsar and Tiwari [8] for diagnosing various mechanical faults in the induction motor at different speeds and loading values. The faults in the induction motor include the bearing fault, unbalance in the rotor, residual bow, and rotor misalignment. This approach used time-domain vibration signals of the motor. The accuracy in fault classification was observed to be increased with increments in the speed and load on the induction motor. Further, it was suggested to utilize time and frequency domain data for the training as well as inspecting the support vector machine algorithms for fault classification. Further, Rapur and Tiwari [208] used the same SVM algorithm through the time domain signal to diagnose the flow instabilities i.e., suction blockage and crack in the impeller in the centrifugal pump. Later, the frequency domain vibration and motor current data were utilized for classifying the mechanical faults and flow instabilities in the centrifugal pump. Several flow instabilities in the centrifugal pump consist of suction re-circulation, discharge re-circulation, pseudo-re-circulation, and dry runs. For future work, it was suggested to adopt the time-frequency analysis (i.e., wavelet transform) for improving the performance of the fault classifier method [9, 209].
Kumar et al [210] published a short state-of-the-art review on vibration signal-based predictive maintenance and diagnosing of the faults in various mechanical devices such as pulleys, gear, bearings, pumps, compressors, etc. The application of artificial neural networks, fuzzy logic, and other emerging artificial intelligence techniques was also elaborated in the health monitoring of machines. At last, it was asserted that the artificial neural network and support vector machine algorithm can be used as an automatic fault diagnosis technique. This also helps in better classification of different faults. Moreover, the convolution neural network method is quite useful in reducing the maintenance cost of the machines. Afterward, a review of fault diagnosis through wavelets on machine components was presented by Srilakshmi et al [211]. The research on quantitative and qualitative methods such as model based approaches, knowledge-based approaches, and pattern recognition based approaches was discussed in this paper. Further, the papers published in the area of approaches for prognosis through statistical-based techniques, model-based techniques as well as data-driven techniques were also described.
Researchers [212, 213] utilized the combined techniques of continuous wavelet transform and support vector machine algorithms to diagnose mechanical and electrical faults in induction motors. For the detection and classification of faults, the axial, radial, and tangential vibration signals of the motor as well as its three-phase current signal were used. Based on this technique, various induction motor fault conditions were simultaneously identified, which included electrical faults (i.e., the broken rotor bar, phase unbalance, and stator winding fault), as well as mechanical faults (i.e., bearing fault, unbalanced rotor, bowed rotor, and misaligned rotor). Experimentation was performed in a test rig consisting of machine fault simulator, a tri-axial accelerometer, three alternating current probes, and a tachometer with constant direct current source, a data acquisition system, and a signal monitor. For future work, it was suggested to use the data after denoising of vibration and current signals and check the robustness of the presented technique. Moreover, it would be a challenging task to develop an accurate mathematical model for each possible fault in induction motor.
One review paper was published by Nasiri et al [214] for describing the applications of AI methods in the field of fracture mechanics for identification of failure modes and mechanisms. A review on five AI methods i.e., artificial neural network, Bayesian network, genetic algorithm, fuzzy logic and case-based reasoning was summarized in this paper. It was concluded that artificial neural network genetic algorithm and Bayesian network are the most useful methods for mechanical fault detection with higher accuracy in the results. The fuzzy logic method also achieves good accuracy in the fault detection and diagnosis, whereas the case-based reasoning method is mainly applicable in the identification of failure mechanism. Future focus can be given in the area of hybrid intelligent systems made by combination of case-based reasoning method with other AI techniques. This can be applied in more complex fracture mechanics problems in practical world applications.
Liu et al [215] presented an overview on theoretical concepts of various types of AI approaches and their applications in the domains of rotating machines. These approaches included k-Nearest neighbour (k-NN), Naive Bayes classifier, support vector machine, artificial neural network, and deep learning method. The advantages and limitations of these approaches were also discussed in this paper. A Venn diagram has been plotted (refer figure 13) to describe the relationship between these artificial intelligence techniques. Here, MLP represents for multi-layer perceptron, CNN for convolutional neural network and RNN for recurrent neural network. Through comparison among these AI techniques, it was concluded that the k-Nearest neighbour method shows lesser performance in faults classification and robustness to noise as compared to other techniques. Further, the support vector machine algorithm and deep learning method exhibited higher accuracy in the results of fault detection and diagnosis. The limitations of k-NN algorithms are the requirements of large computational work and lots of storage space. Moreover, the strong prior assumptions, and need of prior probability are the drawbacks of Naive Bayes classifier method.

A Venn diagram showing the relations among various AI approaches [215].
Later, Wei et al [216] presented a review paper which describes about the two aspects of early fault diagnosis techniques i.e., fault frequency-based detection (FFD) method and artificial intelligence (AI) based method in gears, rotors and bearings. The early fault diagnosis technique is very important in order to provide relevant information about the failure which can happen in the system. This is required for taking necessary maintenance actions and prevent severe failures and reduce financial losses. The fault frequency-based detection method included wavelet transformation technique, empirical mode decomposition technique, ensemble empirical mode decomposition technique, local mean decomposition technique, empirical wavelet transform technique, variational mode decomposition technique, stochastic resonance, and sparse decomposition, etc. The artificial intelligence based method included various types of approaches mentioned by researchers [215]. The different methodologies (i.e., dictionary leaning, time domain features, wavelet transformation and quadratic classifier, etc.) used by various authors for the identification of faults were also summarized in the paper. However, the early fault diagnosis methods were applied on one test rig only, so it was proposed to check the robustness of the methods for multiple rotating machines in practical applications. In the conclusions, one suggestion was made to perform research on an early fault diagnosis method based on multi-information fusion.
Afterward, Lang et al [217] utilized AI techniques, i.e., deep neural network-based methods, for diagnosis of stator winding faults in an electrical vehicle’s motor. This technique could overcome the difficulty in detecting faults in motors under light loads and fluctuations of the rotor speed. Fluctuations in speed cause a reduction in the accuracy of the fault diagnosis. Therefore, the distinct types of mathematical tools (such as pre-processing, extraction, and selection of relevant statistical characteristics and model parameters) in AI techniques make for an effective and reliable fault diagnosis in motors. As various signal patterns of the motor condition are generally uncertain with variations in the operational conditions, it becomes a big challenge to effectively detect the motor state under these varying conditions.
Further, a systematic review was presented by Saini et al [218] for predictive monitoring of multiple faults in the components (i.e., gearboxes, bearings, shaft, etc.) of the rotating system. The review was made on data acquisition technique to artificial intelligence technique. Advanced signal processing methods were described for the de-noising of signals and feature processing methods. It was a very challenging task to speculate the condition of a complete machine based on the fault predictions from several sub-components of that system. This can be overcome by performing research work on fault diagnosis with the help of the stacking ensemble machine learning approach. Here, the information obtained from multiple machine learning models can be combined and used to predict the health of a complete system. In recent publications, Singh et al [219] published a review paper on different AI techniques and their applications in fault diagnosis of rotating machines, i.e., induction motors, centrifugal pumps, bearings, and gears, etc. AI techniques are observed to be the best automated, effective, and efficient fault diagnosis in rotor systems, which is preferable used in the modern industries. At last, the final observations were made after studying various literature and the scope of future work.
Further, a chronological list of source material on additive faults with brief details on their symptoms, effects, identification techniques and shortcoming is presented in table 1.
3.3 Review on condition monitoring of bearings
Mathew and Alfredson [237] presented a review on health monitoring of rolling element bearings by analyzing the fault induced vibration signatures and assessing values of fault parameters. Experimental works were performed on a test set up comprising of a shaft mounted on two double row self-aligning ball bearings. The displacement responses obtained from the rig were analyzed in the time and frequency domains. It was concluded that the frequency domain signals were more effective and consistent in identifying the fault in comparison to the time domain signals. It was due to the inability of most of the time domain techniques, which could not identify damage in bearings when those were subjected to an overload condition. Lastly, it was suggested to increase the number of tests and utilizing different techniques for effective damage detection in bearings.
The different vibration parameters like overall RMS value, peak value, crest factor, power, and cepstrum of the acceleration signal, etc., obtained from a rig having a shaft with two deep grove ball bearing supports were used by Tandon [238] to detect defects in bearings. The author compared all these parameters in the form of defect detectability (defined as the ratio of the level of the defective bearing to the maximum level of the good bearings) and found that the defect detectability of overall power was the best, followed by peak and RMS value measurements. Moreover, the outer race defect and inner race defect, respectively, was not detected by crest factor and cepstrum. After seven years, the author along with other researchers studied the comparison between distinct condition monitoring techniques for detecting defects in induction motor ball bearings. These techniques included vibration based measurements, and stator current harmonics measurement for the detection of outer race of the bearing. Stator current monitoring method was found to be the most useful and cost-effective technique [239].
Kim et al [240] presented a review on novel health monitoring approaches for bearings having speeds lower than 600 rpm. This is a great challenge to monitor low-speed bearings as compared to medium or high speed bearings as the traditional velocity and acceleration sensors are only appropriate for large defect size. The sensors are also sensitive to responses with high impact rates. However, the acoustic emission method was noticed to be the best in detecting the defects such as propagation of crack, surface contact fatigue. The authors have also elaborated the surveys done in the field of condition monitoring using ultrasound method and various vibration measurements, i.e., RMS value, crest value, skewness, kurtosis, etc. Lastly, it was suggested to utilize more advanced signal processing techniques in monitoring the low speed bearings, which can suppress the noise coming from nearby environments and enhance the source signals.
Craig et al [241] applied a technique that incorporated electrostatic sensors and oil pressure sensors, to detect charge during surface wear and debris in oil scavenge lines, respectively, in tapered roller bearings. The bearing distress was identified before the wear-out phase by increasing inductive and optical particle counts. Later, Kirankumar et al [242] explained different vibration analysis based techniques for determining early faults conditions from bearings. The techniques include vibration monitoring, wear debris monitoring, temperature monitoring, soap techniques, non-destructive test, etc. The condition monitoring of bearings gives warnings before final failure, nature of failure and information, manages potential life of machine, evaluates corrective actions, maintains efficiency as well as reduces life risks of operators. Among all techniques, the artificial neural network and convolution neural network methods are noticed to be more effective and efficient in online identification of faults in bearings. These methods can also reduce maintenance cost of the rotor-bearing machines. Lastly, in conclusion, it was suggested to employ pre-whitening of the signal before analysis so that the bearing faults signal can be excellently extracted from the background noise.
In the same direction, Abdeljaber et al [243] utilized compact convolutional neural networks for identifying, quantifying and localizing the damage in ball bearings. Experimental works were performed to verify the accuracy of the proposed approach. Even in addition to the single bearing damage case, the presented fault diagnosis approach can test multiple bearing damage scenarios, in which several defects were introduced at the same time to the monitored bearing. The proposed system exhibited high robustness in contrast to the serious additive noise. As a future work, it was suggested to explore the convolutional neural network under different levels of speed and torque as well as another conditions in the test rig. After one year, the stator current and shrinkage methods were applied for health monitoring of induction motor bearing [244]. Various informations available in the spectrum of stator current spectra (which incorporated the amplitude of an appreciable number of sidebands around the first eleven harmonics) were used for detecting damage in bearings. Shrinkage method was used to avoid the overfitting issues in classifying different conditions of the bearing problems and fault signatures. It was conveyed that the predictions captured with the presented technique matched the expectations from a health monitoring point of view.
Moshrefzadeh et al [245] developed a method that can differentiate between distinct health states of rotating machines, regardless of bearing load and rotating shaft speed conditions. Spectral amplitude modulation method was utilized to highlight several components of a signal with multiple energy levels. Two data classifier methods, i.e., support vector machine and subspace k-nearest neighbors were also discussed in order to classify different fault types in bearing. The proposed approach was found to be comprehensive as even defects without typical frequency signatures were also detected. However, the main drawback was that a classifier trained on one data set (especially a multi-class classifier) might not be able to diagnose rolling element bearings in other machines.
Further, Schwendemann et al [246] presented a review on various schemes for analyzing the bearing fault analysis in grinding machines. The paper was containing two parts of the analysis in which the first part was classification of bearing faults, whereas the second part was prediction of remaining useful life of bearings. The first part included the detection of unhealthy conditions, the position of the error at the inner and outer races of the bearing and the severity of the fault. The second part was important for assessing the productive use of a component before a potential failure, optimizing the replacement costs and suppressing machine’s downtime. Nevertheless, there is a requirement for enhancing the prediction accuracies in diagnosing faults in bearings, which is very much important to know the remaining useful life of bearings.
Kahr et al [247] applied machine learning approach for the fault detection and diagnosis in rolling element bearings in a test set up. The rig set up was comprising of a control box, induction motor to drive the test bearing, protection unit and soft starter of motor, minicomputer to supervise the measurement process and the data flow, accelerometer, analog-digital converter, etc. The authors have utilized synthetically generated data for training and evaluating convolutional neural networks performance. The measurement results of a healthy bearing and bearings having distinct defect sizes in outer ring were compared and observed that the low frequency vibrational components show the impact failure modes in the bearing. It was difficult to expose the characteristics failure frequencies in the presence of noise dominated signals. Hence, the signal demodulation in accordance with the Hilbert transform was exercised for isolating the vibrational components and highlighting the fault signature. Lastly, it was encouraged to utilize the machine learning approach for the health monitoring of large and costly bearings.
Euldji et al [248] proposed a methodology that combined three algorithms, such as variational mode decomposition, decision trees, and extreme learning machines, for extracting relevant features and estimating the remaining useful life of ball bearings using vibration signals. These three algorithms have their own works. The variational mode decomposition technique was used to suppress noise percentage from the actual vibrational responses. Next, the decision tree algorithm was utilized in extracting relevant features from bearings vibration. This was further fed into the extreme learning machine algorithm to determine the life of the ball bearings which is left over for its usefulness. There were investigation of two kinds of data set. The first was relying on real vibration signals and the second was relying on denoised vibration signals. Those data were used to build decision tree for demonstrating the monitoring process in the fault diagnosis.
Recently, Kumar et al [249] proposed an intelligent framework for identification as well as quantitative estimation of bearing defect size. This would prevent unexpected downtime of machines, minimize maintenance costs and achieve higher working performance. Among different techniques, k-nearest neighbor algorithm was considered to be the most reliable artificial intelligence method for identifying bearing defects. The maximum errors in estimating the inner race, outer race and roller defect widths were, respectively, observed to be 2.474%, 14.534%, and 5.517% only. This shows the effectiveness and accuracy of the proposed method and how much it is robust. In the conclusion section, it was advised to utilize a dynamic simulation-assisted framework for defect identification, degradation monitoring, and determination of remaining useful life of cylindrical type roller bearings.
Afterward, Luo et al [250] developed an innovative non-linear dynamics model of deep groove ball bearings having a localized outer race defect. Here, an angle-based, time-varying contact force model was derived with consideration of the transient impact force. Besides this, a displacement excitation function was presented for simulating the variation of the contact displacement relying on the angular velocity of the rolling element around the leading edge of the defect. The described results contributed to the understanding of varying stiffness excitations due to rolling element-defect interaction and their effects on the vibration response of the bearing assembly. However, for understanding the vibration spectrum of defective bearings, the effect of varying stiffness excitation mechanism, external load, diametrical clearance, as well as defect geometry and position, etc., can be explored as a scope of future work.
3.4 Review on hiding and compensation faults
Generally, machine tools are exposed to variable operating conditions. These tools are rarely maintained at steady state, which causes significant variations in the heat generation. When the generated heat gets combined with the effect of environmental temperature variation, the structure of machine tool is exposed to uneven distributions of the temperature field. This causes occurrence of thermal errors in high speed spindle systems. Thermal errors are the hidden errors which influence the machining accuracy of computer numerical control (CNC) machine tools [251]. Hence, it is very crucial to eliminate or compensate these errors. In the area of analysing the effect of thermal errors and reducing them, Creighton [252] proposed a spindle growth compensation scheme, which was based on the exponential growth model. This scheme was capable of minimise the effect of thermal errors up to 80% in an experimental test rig consisting of a spindle and a motor. Mayr et al [253] and Li [254] have summarized a review of the research works done in the field of understanding changes in machine tool performance due to changes in thermal conditions. The main focus was on metal cutting machine tools i.e., turning and milling machines. The procedures and techniques used in modelling and compensating methods of the thermal error were also described in this paper. Lastly, it was advised to develop more precise and effective measurement devices as well as strategies, in order to reduce the uncertainties of temperature and displacement measurement of machine tools and work pieces.
Further, Ma et al [255] proposed a genetic algorithm to boost the accuracy and convergence of thermal error compensation model relying on conventional neural networks. The proposed approach was experimentally applied in a high-speed spindle system of a jig borer. From the results analysis, it was observed that the axial accuracy gets improved by 85% after error compensation, and the transverse directions (i.e., vertical and horizontal directions) accuracy gets improved by 82% and 85%, respectively. This showed the effectiveness and robustness of the presented technique in modelling and compensating the thermal errors. Later, in the same direction, a review paper was published by Li [256] to summarize the different thermal error suppression techniques and modelling compensation methods used in high-speed motorized spindle machines.
Haoshuo [257] utilized a loading method based on heat flux to suppress thermal errors of a motorized spindle. A finite element model was established to examine the steady-state and transient thermal-structure coupling analysis of the spindle. Through both experimental and simulation works, the author could effectively predict the thermal errors and minimise them up to higher percent. In recent publication, Friedrich [258] applied a hybrid thermo-elastic correction model approach for correction of thermal errors in computer numerical control (CNC) machine tools. The approach included simulation generated characteristic diagrams, the finite element model and a structural model-based decision algorithm. It was observed that the proposed approach provided good calculation results as compared to the measured data.
4 General remarks and future directions of research
A detailed review of the additive faults in rotating machines and their identification using signal based vibrational analysis as well as artificial intelligence techniques has been presented in this paper. The primary emphasis was given to summarizing the numerical and experimental investigations performed in simple and complex rigid as well as flexible rotor systems, such as dual-rotor systems, turbogenerator systems, doubly-fed induction generators, helicopters, wind turbines, and moment exchange devices. For the numerical modelling of the rotating system, Lagrange’s principle and finite element method were mostly used. A numerical integration method, i.e. Runge-Kutta 4th order solver was mainly utilized to solve the dynamic equations and generate the system linear as well as nonlinear responses. Experimental works were executed by developing the laboratory rotor-bearing test rigs with mechanical and electrical components [259] as per the requirement of operation and existing faults. From briefly studying the various literature and examining the response natures, it is ascertained that both the theoretical and experimental aspects are equally important for a deeper understanding of the fault effects as well as vibration mechanism and signatures. The following points are the outcomes of the present review:
4.1 General remarks
-
1.
Experimental investigation is very limited for the case of rotor systems with rub between rotor and stator due to complexity exists in the vibrational phenomena. Further, the research is needed to explore in the development of an analytical technique for prediction of time dependent wear in protective and over-layered engine bearings.
-
2.
Identification of primary faults at the early stage is extremely required to prevent the occurrence of other faults (i.e., secondary faults) caused due to primary type faults.
-
3.
Numerical investigation and development of mathematical model is also very limited in rotor systems with mechanical looseness faults.
-
4.
Research is quite sufficient in the field of coupling misalignment and bearing misalignment fault in the rotor-bearing systems. The bearing misalignment included misalignment in hydrodynamic plain journal bearings, ball bearings, fluid film bearings, foil bearings and active magnetic bearings, etc.
-
5.
The effect of tooth-crack fault and its identification in gear-based torque transmission system has been also explored by few researchers. However, they were no simultaneous consideration of cracks in the flexible shafts on which the gear drives were mounted. There is a great possibility of development of cracks in the shafts due to fatigue of the shaft material, caused by unrestrained cyclic working of rotating machine. Moreover, the rotational coefficients of bearings along with their translational coefficients, as well as the coupling between axial, bending and torsional modes were also not included during modelling of the cracked rotor-gear-bearing system.
-
6.
Through various published literatures it has been found that the mathematical model has also been developed for modelling various mechanical and electrical faults in the induction motors, AC machines and generators, etc.
-
7.
Although artificial intelligence (AI) technique exhibits better when it comes to predict the results from a seen data set, this fails to perform in a situation on which the AI model is not trained. Therefore, more advanced techniques like the combination of artificial neural network and fuzzy logic algorithm (which is also called as ANFIS algorithm i.e., adaptive neuro fuzzy inference system) along with deep learning model can be used for providing excellent performance in the fault detection and diagnosis as compared to individual artificial intelligence technique.
-
8.
Exploration of research which combines multiple model banks and multi-stage filtering methods is not found yet in the field of hybrid fault detection techniques. This hybrid technique will incorporate together the parameter and state estimation techniques to increase the accuracy and robustness in the diagnosis performance.
-
9.
Several faults (such as cracks, misalignments, bows, etc.) with high severity levels may occur simultaneously in the rotating machines during the operation, so it can be a good approach to consider the faults under progression for detecting them at the initial stage.
-
10.
Generalization of the artificial intelligence based techniques is one of the challenging aspects in fault detection and diagnosis, which may be considered on a priority basis in the coming future.
4.2 Future directions for further research
Based on the critical review of the literature, it can be ascertained that a large number of investigations have been reported on the dynamic analysis and condition monitoring of additive faults in rotor-bearing systems using model-based methods, signal-based methods, and artificial intelligence techniques, deep learning algorithms, etc. Moreover, case-based reasoning method has also been applied for solving problems in the area of fracture mechanics, design and optimisation of micro electro-mechanical systems, etc. However, there are a few areas that need further studies and extensions in research work. These are as follows:
-
1.
A randomized and population based optimization method (which is inspired by the flocking behaviour of birds or fish schooling) can be used for solving systems of nonlinear equations and identification of unbalance in a flexible rotor incorporated with active magnetic bearings. The AMB technology can be used as the vibration controller or the rotor supports.
-
2.
Optimization techniques can be developed for identification of multi-cracks with more variables in crack fault. Experimental works can also be done for studying the dynamic analysis and identification of two or more open and switching cracks with different orientations in flexible rotor systems.
-
3.
The model-based identification methodology can be explored for a practical turbine-generator system incorporated with bearing and coupling misalignments using data of measured vibration. Further, the analysis of the thermal effects and film thickness can be investigated in the misaligned engine bearings.
-
4.
An attempt can be made in the area of the nonlinear dynamic behaviour of the rotor system associated with internal damping and nonlinearity arising from supported bearings. Moreover, the analysis for rub impact can be exposed for the flexible and complex dual rotor and turbogenerator systems.
-
5.
Experimental investigations are required on real aero-engines, double-stage bowed rotor-gear-bearing system, and power station turbogenerators for investigating the dynamic analysis and identification of unbalance as well as bow faults.
-
6.
Analysis and identification of bow and rub faults can be done in the practical rotating machines with consideration of thermal effect arising from the rub, shaft damping and gyroscopic effects, through numerical investigations and experiments.
-
7.
There is a scope of developing the complex and practical rotor models, considering the temperature variations and its effect in the rub fault and looseness at both or more supported bearings. Almost all investigations were done at low speeds, which can be further explored for the rotor systems in the range of higher spin speeds.
-
8.
The experimental works can be explored for detection of crack and bow in the turbine blades. Further, the nonlinearities from the supported oil-film bearings, the shaft residual unbalances, anisotropic AMB-rotor supports can be considered while theoretically developing the complex rotor models.
-
9.
Research can be explored in the area of combination of case-based reasoning method with other artificial intelligence techniques (i.e., hybrid intelligence techniques) for identification of fracture modes and parameters in complex fracture mechanics problems.
-
10.
Further, in the future diagnostic systems, not only data-driven AI methods, but also the consideration of failure mechanism and prior knowledge should be utilized and integrated closely to improve diagnostic performance.
-
11.
At present, fault diagnostic systems are mostly built as the combination of individual parts, such as data collection, feature extraction and dimensionality reduction, fault recognition with little consideration of the whole diagnostic system. Deep learning techniques provide a way to integrate the feature extraction part and pattern recognition part into a system. More than this, a complete integrated and automated diagnostic system should be paid more attention.
-
12.
Research work can be performed on early fault diagnosis method based on multi-information fusion. This can extract more information of the faults characteristics, which is important for detection of weak fault symptoms at an early fault stage.
-
13.
Advanced methods such as the combination of artificial neural network and fuzzy logic algorithm, combined methods of multiple model banks and multi-stage filtering technique as well as combination of deep learning, signal processing and model based methods can be proposed in future to enhance the efficiency of early fault diagnosis techniques. This will also improve their capability of finding faults with high accuracy and fast computation.
Availability of data and materials
All data and materials are in the manuscript itself.
References
Tiwari R 2017 Rotor Systems: Analysis and Identification. CRC Press, Boca Raton
Höfling T and Pfeufer T 1994 Detection of additive and multiplicative faults-parity space vs. parameter estimation. IFAC Proc. 27: 515–520
Isermann R 2004 Model-based fault detection and diagnosis-status and applications. IFAC Proc. 37: 49–60
Muszynska A 1995 Vibrational diagnostics of rotating machinery malfunctions. Int. J. Rotat. Mach. 1: 237–266
Tiwari R, Lees A and Friswell M 2004 Identification of dynamic bearing parameters: a review. Shock. Vib. Digest. 36: 99–124
Tiwari R, Manikandan S and Dwivedy S 2005 A review of the experimental estimation of the rotor dynamic parameters of seals. Shock Vib. Digest. 37: 261
Uddin M N and Rahman M M 2015 Online current and vibration signal monitoring based fault detection of bowed rotor induction motor. In: IEEE Energy Conversion Congress and Exposition (ECCE), pp. 2988–2994
Gangsar P and Tiwari R 2016 Taxonomy of induction-motor mechanical-fault based on time-domain vibration signals by multiclass SVM classifiers. Intell. Ind. Syst. 2: 269–281
Rapur J S and Tiwari R 2018 Automation of multi-fault diagnosing of centrifugal pumps using multi-class support vector machine with vibration and motor current signals in frequency domain. J. Braz. Soc. Mech. Sci. Eng. 40: 1–21
Făgărăşan I and Iliescu S S 2008 Applications of fault detection methods to industrial processes. WSEAS Trans. Syst. 7: 812–821
Walker R, Perinpanayagam S and Jennions I K 2013 Rotordynamic faults: recent advances in diagnosis and prognosis. Int. J. Rotat. Mach. 2013: 856865
Srinivas R S, Tiwari R and Kannababu C 2018 Application of active magnetic bearings in flexible rotordynamic systems—a state-of-the-art review. Mech. Syst. Signal. Process. 106: 537–572
Gayen D, Tiwari R and Chakraborty D 2019 Static and dynamic analyses of cracked functionally graded structural components: a review. Compos. Part B: Eng. 173: 106982
Benbouzid M E H, Vieira M and Theys C 1999 Induction motors’ faults detection and localization using stator current advanced signal processing techniques. IEEE Trans. Power. Electron. 14: 14–22
Lin D, Wiseman M, Banjevic D and Jardine A K 2004 An approach to signal processing and condition-based maintenance for gearboxes subject to tooth failure. Mech. Syst. Signal Process. 18: 993–1007
Liu Z and Zhang L 2020 A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings. Measurement 149: 107002
Kuo C H, Chuang Y-F and Liang S-H 2022 Failure mode detection and validation of a shaft-bearing system with common sensors. Sensors 22: 6167
Bishop R and Gladwell G 1959 The vibration and balancing of an unbalanced flexible rotor. J. Mech. Eng. Sci. 1: 66–77
Smalley A 1989 The dynamic response of rotors to rubs during startup. J. Vib. Acoust. Stress. Reliab. Des. 111: 226–233
Lees A 2007 Misalignment in rigidly coupled rotors. J. Sound. Vib. 305: 261–271
Chatzisavvas I and Dohnal F 2015 Unbalance identification using the least angle regression technique. Mech. Syst. Signal. Process. 50: 706–717
Shin D, Suh J and Palazzolo A 2022 Parametric study of flexure pivot bearing induced thermal bow-rotor instability (Morton effect). J. Tribol. 144: 071801
Drechslen J 1980 Processing surplus information in computer aided balancing of large flexible rotors. In: International Conference on Vibrations in Rotating Machinery, Cambridge, UK
Morton P 1985 Modal balancing of flexible shafts without trial weights. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 199: 71–78
Krodkiewski J, Ding J and Zhang N 1994 Identification of unbalance change using a non-linear mathematical model for multi-bearing rotor systems. J. Sound Vib. 169: 685–698
Lees A and Friswell M 1997 The evaluation of rotor imbalance in flexibly mounted machines. J. Sound. Vib. 208: 671–683
Shih Y P and Lee A-C 1997 Identification of the unbalance distribution in flexible rotors. Int. J. Mech. Sci. 39: 841–857
Zhou S and Shi J 2001 Active balancing and vibration control of rotating machinery: a survey. Shock Vib. Digest. 33: 361–371
De Queiroz M 2009 An active identification method of rotor unbalance parameters. J. Vib. Control 15: 1365–1374
Nauclér P and Söderström T 2010 Unbalance estimation using linear and nonlinear regression. Automatica 46: 1752–1761
Sudhakar G and Sekhar A 2011 Identification of unbalance in a rotor bearing system. J. Sound. Vib. 330: 2299–2313
De Castro H F, Cavalca K L, De Camargo L W F and Bachschmid N 2010 Identification of unbalance forces by metaheuristic search algorithms. Mech. Syst. Signal. Process. 24: 1785–1798
Menshikov Y 2013 Identification of rotor unbalance as inverse problem of measurement. Adv. Pure Math. 3: 20–25
Pennacchi P, Vania A, Chatterton S, Nistor I, Voinis P, Ricci R et al 2013 Unbalance identification in large steam turbo-generator unit using a model-based method. In: International Design Engineering Technical Conferences & Computers and Information in Engineering Conference V008T13A053
Markert R, Platz R and Seidler M 2001 Model based fault identification in rotor systems by least squares fitting. Int. J. Rotat. Mach. 7: 311–321
Yao J, Liu L, Yang F, Scarpa F and Gao J 2018 Identification and optimization of unbalance parameters in rotor-bearing systems. J. Sound Vib. 431: 54–69
Shrivastava A and Mohanty A R 2019 Identification of unbalance in a rotor system using a joint input-state estimation technique. J. Sound Vib. 442: 414–427
Shrivastava A and Mohanty A R 2020 Identification of unbalance in a rotor-bearing system using Kalman filter–based input estimation technique. J. Vib. Control 26: 1081–1091
Yun X, Pang Z, Jiang G and Mei X 2021 Research on identification of unbalance parameters of rotor with multi-plane using improved particle swarm optimization. J. Braz. Soc. Mech. Sci. Eng. 43: 1–12
Abbasi A, Firouzi B, Sendur P, Ranjan G and Tiwari R 2022 Identification of unbalance characteristics of rotating machinery using a novel optimization-based methodology. Soft Comput. 26: 4831–4862
Lin C-L, Liang J-W, Huang Y-M and Huang S-C 2023 A novel model-based unbalance monitoring and prognostics for rotor-bearing systems. Adv. Mech. Eng. 15: 16878132221148020
Wang Z, Lu C, Ma J and Du S 2023 Identification method of unbalanced fault characteristics of horizontal shaft of rotary table of drilling rig. In: IOP Conference Series: Materials Science and Engineering, p. 012012
Zhang Y, Xie Z, Zhai L and Shao M 2023 Unbalanced vibration suppression of a rotor with Rotating-Frequency faults using signal purification. Mech. Syst. Signal. Process. 190: 110153
Zhong S and Hou L 2023 Numerical and experimental studies on unsupervised deep Lagrangian learning based rotor balancing method. Sci. China Technol. Sci. 66: 1050–1061
Lin K, Li Y, Wu Y, Fu H, Jiang J and Chen Y 2023 A deep learning-based unbalanced force identification of the hypergravity centrifuge. Sensors 23: 3797
Baltazar-Tadeo L A, Colín-Ocampo J, Mendoza-Larios J G, Abúndez-Pliego A, Nango-Blanco M and Blanco-Ortega A et al. 2023 An integrated balancing method for asymmetric rotor-bearing systems: algebraic identification, modal balancing, and active balancing disks. J. Vib. Eng. Tech. 11: 619–645
Davies W and Mayes I 1984 The vibrational behavior of a multi-shaft, multi-bearing system in the presence of a propagating transverse crack. J. Vib Acoust. Stress Reliab. Des. 106: 146–153
Kumar P 2024 Dynamic analysis and identification in a cracked and unbalanced rigid rotor with two offset discs and one middle disc mounted on foil bearings. Int. J. Dyn. Control 12: 2024
Gasch R 1993 A survey of the dynamic behaviour of a simple rotating shaft with a transverse crack. J. Sound. Vib. 160: 313–332
Singh S and Tiwari R 2015 Model-based fatigue crack identification in rotors integrated with active magnetic bearings. J. Vib. Control. 23: 980–1000
Nelson H and Nataraj C 1986 The dynamics of a rotor system with a cracked shaft. J. Vib. Acoust. 108: 189–196
Jun O, Eun H, Earmme Y and Lee C-W 1992 Modelling and vibration analysis of a simple rotor with a breathing crack. J. Sound. Vib. 155: 273–290
Sekhar A and Prasad P B 1997 Dynamic analysis of a rotor system considering a slant crack in the shaft. J. Sound. Vib. 208: 457–474
Sekhar A 1999 Vibration characteristics of a cracked rotor with two open cracks. J. Sound. Vib. 223: 497–512
Zhu C, Robb D A and Ewins D J 2003 The dynamics of a cracked rotor with an active magnetic bearing. J. Sound. Vib. 265: 469–487
Sekhar A 2004 Crack identification in a rotor system: a model-based approach. J. Sound. Vib. 270: 887–902
Sekhar A 2004 Model-based identification of two cracks in a rotor system. Mech. Syst. Signal. Process. 18: 977–983
Dharmaraju N, Tiwari R and Talukdar S 2004 Identification of an open crack model in a beam based on force–response measurements. Comput. Struct. 82: 167–179
Dharmaraju N, Tiwari R and Talukdar S 2005 Development of a novel hybrid reduction scheme for identification of an open crack model in a beam. Mech. Syst. Signal. Process. 19: 633–657
Pennacchi P, Bachschmid N and Vania A 2006 A model-based identification method of transverse cracks in rotating shafts suitable for industrial machines. Mech. Syst. Signal. Process. 20: 2112–2147
Sekhar A 2008 Multiple cracks effects and identification. Mech. Syst. Signal. Process. 22: 845–878
Kumar C and Rastogi V 2009 A brief review on dynamics of a cracked rotor. Int. J. Rotat. Mach. 2009: 1–6
Singh S and Tiwari R 2010 Identification of a multi-crack in a shaft system using transverse frequency response functions. Mech. Mach. Theory 45: 1813–1827
Han Q, Zhao J and Chu F 2012 Dynamic analysis of a geared rotor system considering a slant crack on the shaft. J. Sound. Vib. 331: 5803–5823
Singh S and Tiwari R 2016 Model-based switching-crack identification in a Jeffcott rotor with an offset disk integrated with an active magnetic bearing. J. Dyn. Syst. Meas. Control 138: 031006
Shravankumar C and Tiwari R 2013 Model-based crack identification using full-spectrum. In: ASME 2013 Gas Turbine India Conference, pp. V001T06A011–V001T06A011
Singh S and Tiwari R 2018 Model based identification of crack and bearing dynamic parameters in flexible rotor systems supported with an auxiliary active magnetic bearing. Mech. Mach. Theory 122: 292–307
Gradzki R, Kulesza Z and Bartoszewicz B 2019 Method of shaft crack detection based on squared gain of vibration amplitude. Nonlinear Dyn. 98: 671–690
Joshuva A and Sugumaran V 2019 Crack detection and localization on wind turbine blade using machine learning algorithms: a data mining approach. Struct. Durab. Health Monit. 13: 181
Yang Y, Xia W, Han J, Song Y, Wang J and Dai Y 2019 Vibration analysis for tooth crack detection in a spur gear system with clearance nonlinearity. Int. J. Mech. Sci. 157: 648–661
Chen Z and Shao Y 2011 Dynamic simulation of spur gear with tooth root crack propagating along tooth width and crack depth. Eng. Fail. Anal. 18: 2149–2164
Xiang L, Zhang Y and Hu A 2019 Crack characteristic analysis of multi-fault rotor system based on whirl orbits. Nonlinear Dyn. 95: 2675–2690
Peng H and He Q 2019 The effects of the crack location on the whirl motion of a breathing cracked rotor with rotational damping. Mech. Syst. Signal. Process. 123: 626–647
Aftab H, Baneen U and Israr A 2021 Identification and severity estimation of a breathing crack in a plate via nonlinear dynamics. Nonlinear Dyn. 104: 1973–1989
Mohammed S A, Ghazaly N M and Abdo J 2022 Fault diagnosis of crack on gearbox using vibration-based approaches. Symmetry 14: 417
Zhong X and Ban H 2022 Crack fault diagnosis of rotating machine in nuclear power plant based on ensemble learning. Ann. Nucl. Energy 168: 108909
Qiao Z, Chen K, Zhou C and Ma H 2023 An improved fault model of wind turbine gear drive under multi-stage cracks. Simul. Model. Prac. Theory 122: 102679
Wang C, Zheng Z, Guo D, Liu T, Xie Y and Zhang D 2023 An experimental setup to detect the crack fault of asymmetric rotors based on a deep learning method. Appl. Sci. 13: 1327
Kumar P 2021 Model based analysis and identification of unbalance and misalignment in rotor systems levitated by active magnetic bearings. In: PhD, Mechanical Engineering, Indian Institute of Technology Guwahati, Guwahati
Dewell D and Mitchell L 1984 Detection of a misaligned disk coupling using spectrum analysis. J. Vib. Acoust. Stress Reliab. Des. 106: 9–16
Sekhar A and Prabhu B 1995 Effects of coupling misalignment on vibrations of rotating machinery. J. Sound. Vib. 185: 655–671
Rao A S and Sekhar A 1996 Vibration analysis of rotor-coupling-bearing system with misaligned shafts. In: ASME 1996 International Gas Turbine and Aeroengine Congress and Exhibition, pp. V005T14A001-V005T14A001
Hu W, Miah H, Feng N and Hahn E 2000 A rig for testing lateral misalignment effects in a flexible rotor supported on three or more hydrodynamic journal bearings. Tribol. Int. 33: 197–204
Prabhakar S, Sekhar A and Mohanty A 2001 Vibration analysis of a misaligned rotor-coupling-bearing system passing through the critical speed. Proc. Inst. Mech. Eng Part C: J. Mech. Eng. Sci. 215: 1417–1428
Al-Hussain K 2003 Dynamic stability of two rigid rotors connected by a flexible coupling with angular misalignment. J. Sound. Vib. 266: 217–234
Pennacchi P and Vania A 2005 Diagnosis and model based identification of a coupling misalignment. Shock Vib. 12: 293–308
Patel T H and Darpe A K 2009 Experimental investigations on vibration response of misaligned rotors. Mech. Syst. Signal Process. 23: 2236–2252
Arebi L, Gu F, Hu N and Ball A 2011 Misalignment detection using a wireless sensor mounted on a rotating shaft. In: Proceedings of the 24th International Congress on Condition Monitoring and Diagnostics Engineering Management, Stavanger, Norway
Messaoud N B, Bouaziz S, Fakhfakh T, Maatar M and Haddar M 2011 Dynamic behavior of active magnetic bearings in presence of angular misalignment defect. Int. J. Appl. Mech. 3: 491–505
Lal M 2020 Modeling and estimation of speed dependent bearing and coupling misalignment faults in a turbine generator system. Mech. Syst. Signal Process. 151: 107365
Lal M and Tiwari R 2012 Multi-fault identification in simple rotor-bearing-coupling systems based on forced response measurements. Mech. Mach. Theory 51: 87–109
Lal M and Tiwari R 2013 Quantification of multiple fault parameters in flexible turbo-generator systems with incomplete rundown vibration data. Mech. Syst. Signal Process. 41: 546–563
Lal M and Tiwari R 2018 Experimental identification of shaft misalignment in a turbo-generator system. Sādhanā 43: 80
Verma A K, Sarangi S and Kolekar M 2014 Experimental investigation of misalignment effects on rotor shaft vibration and on stator current signature. J. Fail. Anal. Prev. 14: 125–138
Jang J Y and Khonsari M M 2015 On the characteristics of misaligned journal bearings. Lubricants 3: 27–53
Jang J and Khonsari M 2019 Performance and characterization of dynamically-loaded engine bearings with provision for misalignment. Tribol. Int. 130: 387–399
Sawalhi N, Ganeriwala S and Tóth M 2019 Parallel misalignment modeling and coupling bending stiffness measurement of a rotor-bearing system. Appl. Acoust. 144: 124–141
Srinivas R S, Tiwari R and Babu C K 2020 Modeling, analysis, and identification of parallel and angular misalignments in a coupled rotor-bearing-active magnetic bearing system. J. Dyn. Syst. Meas. Control 143: 011007
Kumar P and Tiwari R 2019 A numerical study on the effect of unbalance and misalignment fault parameters in a rigid rotor levitated by active magnetic bearings. In: ASME 2019 Gas Turbine India Conference, p. V001T05A003
Kumar P, Kumar V, Kumar K and Meena L S 2020 Unbalance and dynamic parameters estimation in a rigid rotor mounted on active magnetic bearings. In: Advances in Applied Mechanical Engineering, pp. 363–371
Kumar P and Tiwari R 2020 Development of a novel approach for quantitative estimation of rotor unbalance and misalignment in a rotor system levitated by active magnetic bearings. Iran. J. Sci. Technol. Trans. Mech. Eng. 45(769–786): 2020
Kumar P and Tiwari R 2020 Dynamic analysis and identification of unbalance and misalignment in a rigid rotor with two offset discs levitated by active magnetic bearings: a novel trial misalignment approach. Propuls. Power Res. 10: 58–82
Kumar P and Tiwari R 2021 Finite element modelling, analysis and identification using novel trial misalignment approach in an unbalanced and misaligned flexible rotor system levitated by active magnetic bearings. Mech. Syst. Signal Process. 152: 107454
Tiwari R and Kumar P 2022 An innovative virtual trial misalignment approach for identification of unbalance, sensor and active magnetic bearing misalignment along with its stiffness parameters in a magnetically levitated flexible rotor system. Mech. Syst. Signal Process. 167: 108540
Kumar R, Singh M, Khan S, Singh J, Sharma S and Kumar H et al. 2023 A state-of-the-art review on the misalignment, failure modes and its detection methods for bearings. MAPAN 38: 265–274
Hu S, Han T, Qi Y, Zhang C, Shi X and Peng Z 2023 Misalignment fault identification of a multi-span rotor system enabled by triboelectric nanogenerators. Nano Energy 109: 108308
Zhang C, Cao P, Zhu R, Chen W and Wang D 2023 Dynamic modeling and analysis of the spline joint-flexible coupling-rotor system with misalignment. J. Sound. Vib. 554: 117696
Kimball A L 1932 Vib. Prevent. Eng. J. Wiley & sons, Incorporated
Ehrich F 1964 Shaft whirl induced by rotor internal damping. J. Appl. Mech. 31: 279–282
Lund J 1974 Stability and damped critical speeds of a flexible rotor in fluid-film bearings. J. Manuf. Sci. Eng. 96: 509–517
Zorzi E and Nelson H 1977 Finite element simulation of rotor-bearing systems with internal damping. J. Eng. Gas Turbines Power 99: 71–76
Chen L-W and Ku D-M 1991 Analysis of whirl speeds of rotor-bearing systems with internal damping by C0 finite elements. Finite Element Anal. Des. 9: 169–176
Ku D M 1998 Finite element analysis of whirl speeds for rotor-bearing systems with internal damping. Mech. Syst. Signal Process. 12: 599–610
Melanson J and Zu J 1998 Free vibration and stability analysis of internally damped rotating shafts with general boundary conditions. J. Vib. Acoust. 120: 776–783
Forrai L 2000 Instability due to internal damping of symmetrical rotor-bearing systems. J. Comput. Appl. Math. 1: 137–147
Genta G 2004 On a persistent misunderstanding of the role of hysteretic damping in rotordynamics. J. Vib. Acoust. 126: 459–461
Dimentberg M 2005 Vibration of a rotating shaft with randomly varying internal damping. J. Sound. Vib. 285: 759–765
Fischer J and Strackeljan J 2006 Stability analysis of high speed lab centrifuges considering internal damping in rotor-shaft joints. Eur. J. Eng. Mech. 26: 131–147
Montagnier O and Hochard C 2007 Dynamic instability of supercritical driveshafts mounted on dissipative supports-effects of viscous and hysteretic internal damping. J. Sound. Vib. 305: 378–400
Kang C, Hsu W, Lee E and Shiau T 2011 Dynamic analysis of gear-rotor system with viscoelastic supports under residual shaft bow effect. Mech. Mach. Theo. 46: 264–275
Samantaray A 2008 Steady-state dynamics of a non-ideal rotor with internal damping and gyroscopic effects. Nonlinear Dyn. 56: 443–451
Vatta F and Vigliani A 2008 Internal damping in rotating shafts. Mech. Mach. Theory 43: 1376–1384
Chouksey M, Dutt J and Modak S 2012 Modal analysis of rotor-shaft system under the influence of rotor-shaft material damping and fluid film forces. Mech. Mach. Theory 48: 81–93
Sarmah N and Tiwari R 2018 Identification of crack and internal damping parameters using full spectrum responses from a Jeffcott rotor incorporated with an active magnetic bearing. In: International Conference on Rotor Dynamics, pp. 34–48
Roy D K and Tiwari R 2019 Experimental identification of rotating and stationary damping in a cracked rotor system with an offset disc. Arch. Mech. Eng. 66: 447–474
Kozioł M and Cupiał P 2020 The influence of the active control of internal damping on the stability of a cantilever rotor with a disc. Mech. Des. Struct. Mach. 50: 1–14
Wang L, Wang A, Jin M, Yin Y, Heng X and Ma P 2021 Nonlinear dynamic response and stability of a rod fastening rotor with internal damping effect. Arch. Appl. Mech. 91: 3851–3867
Sarmah N and Tiwari R 2022 Numerical and experimental study on quantitative assessment of multiple fault parameters in a warped internally damped rotor with a transverse fatigue crack integrated with an active magnetic bearing. Mech. Syst. Signal Process. 174: 109112
Meacham W, Talbert P, Nelson H and Cooperrider N 1988 Complex modal balancing of flexible rotors including residual bow. J. Propul. Power. 4: 245–251
Rao J and Sharma M 2000 Dynamic analysis of bowed rotors. In: Proceedings of the VETOMAC-1 Conference, Bangalore, India
Nelson H D 2002 Steady synchronous response and balancing of rotor systems with residual shaft bow. Int. J. Rotat. Mach. 8: 431–438
Pennacchi P and Vania A 2004 Accuracy in the identification of a generator thermal bow. J. Sound. Vib. 274: 273–295
Song G, Yang Z, Ji C and Wang F 2013 Theoretical-experimental study on a rotor with a residual shaft bow. Mech. Mach. Theory 63: 50–58
Mogal S and Lalwani D 2017 Fault diagnosis of bent shaft in rotor bearing system. J. Mech. Sci. Technol. 31: 1–4
Pereira E, Dedini K and Tuckmantel F 2019 Modeling of shaft bow using finite element of curved beam. Int. J. Eng. Res. Technol. 27: 1–1
Chatterton S, Pennacchi P and Vania A 2022 An unconventional method for the diagnosis and study of generator rotor thermal bows. J. Eng. Gas. Turbines Power 144: 011024
Gautam A K and Tiwari R 2023 Dynamic response characteristics of multiplicative faults in a misaligned-bowed rotor-train system integrated with active magnetic bearings. Int. J. Dyn. Control 12: 1–29
Han Y, Ri K, Yun C, Kim K and Han P 2023 Effect of nonlinearities on response characteristics of rotor systems with residual shaft bow. Nonlinear Dyn. 111: 16003–16019
Chu F and Zhang Z 1997 Periodic, quasi-periodic and chaotic vibrations of a rub-impact rotor system supported on oil film bearings. Int. J. Eng. Sci. 35: 963–973
Chu F and Zhang Z 1998 Bifurcation and chaos in a rub-impact Jeffcott rotor system. J. Sound Vib. 210: 1–18
Al-bedoor B O 2000 Transient torsional and lateral vibrations of unbalanced rotors with rotor-to-stator rubbing. J. Sound Vib. 229: 627–645
Bachschmid N, Pennacchi P, Vania A, Zanetta G and Gregori L 2004 Identification of rub and unbalance in 320-MW turbogenerators. Int. J. Rotat. Mach. 10: 265–281
Wang H, Guan X, Chen G, Gong J, Yu L and Yuan S et al. 2019 Characteristics analysis of rotor-rolling bearing coupled system with fit looseness fault and its verification. J. Mech. Sci. Technol. 33: 29–40
Chang-Jian C-W and Chen C-K 2007 Chaos and bifurcation of a flexible rub-impact rotor supported by oil film bearings with nonlinear suspension. Mech. Mach. Theory 42: 312–333
Abuzaid M A, Eleshaky M E and Zedan M G 2009 Effect of partial rotor-to-stator rub on shaft vibration. J. Mech. Sci. Technol. 23: 170–182
Yungong L, Jinping Z, Liqiang W and Yang C 2011 A fault feature extraction method for rotor rubbing based on load identification and measured impact response. Proc. Eng. 24: 793–797
Ma H, Tai X, Yi H, Lv S and Wen B 2013 Nonlinear dynamic characteristics of a flexible rotor system with local rub-impact. J. Phys. Conf. Ser. 448: 012015
Huang Z 2016 Dynamic analysis on rotor-bearing system with coupling faults of crack and rub-impact. J. Phys. Conf. Ser. 744: 012158
Liang H, Lu H, Feng K, Liu Y, Li J and Meng L 2021 Application of the improved NOFRFs weighted contribution rate based on KL divergence to rotor rub-impact. Nonlinear Dyn. 104: 3937–3954
Prabith K and Krishna I P 2022 Response and stability analysis of a two-spool aero-engine rotor system undergoing multi-disk rub-impact. Int. J. Mech. Sci. 213: 106861
Sozinando D F, Tchomeni B X and Alugongo A A 2023 Experimental study of coupled torsional and lateral vibration of vertical rotor-to-stator contact in an inviscid fluid. Math. Comput. Appl. 28: 44
Paiva A, Moreira R V, Brandão A and Savi M A 2023 Nonlinear dynamics of a rotor–stator system with contacts. Nonlinear Dyn. 111: 11753–11772
Chu F and Tang Y 2001 Stability and non-linear responses of a rotor-bearing system with pedestal looseness. J. Sound Vib. 241: 879–893
Wu T, Chung Y and Liu C 2010 Looseness diagnosis of rotating machinery via vibration analysis through Hilbert–Huang transform approach. J. Vib. Acoust. 132: 031005
Ma H, Huang J, Zhang S and Niu H 2013 Nonlinear vibration characteristics of a rotor system with pedestal looseness fault under different loading conditions. J. Vibroeng. 15: 406–418
Reddy M C S and Sekhar A 2013 Application of artificial neural networks for identification of unbalance and looseness in rotor bearing systems. Int. J. Appl. Sci. Eng. 11: 69–84
Cao Q, Xiang Q and Qin G 2015 Review of mechanical looseness phenomena and failure characteristics study. Noise Vib. Control 35: 1–6
Wang H, Chen G and Song P 2016 Asynchronous vibration response characteristics of aero-engine with support looseness fault. J. Comput. Nonlinear Dyn. 11: 031013
Wang H 2021 Passive vibration reduction of a squeeze film damper for a rotor system with fit looseness between outer ring and housing. J. Low Freq. Noise Vib. Active Control 40: 1473–1492
Lin J, Zhao Y, Wang P, Wang Y, Han Q and Ma H 2021 Nonlinear responses of a rotor-bearing-seal system with pedestal looseness. Shock Vib. 2021: 9937700
Zhang H, Lu K, Zhang W and Fu C 2022 Investigation on dynamic behaviors of rotor system with looseness and nonlinear supporting. Mech. Syst. Signal Process. 166: 108400
Xingrong H, Donglai Y, Kaiwen X and Yi Y 2023 Analysis of dry friction fault caused by rotor elastic support bolt looseness. J. Aerosp. Power 38: 1723–1733
Zhao Y, Lin J, Wang X, Han Q and Liu Y 2023 A novel data-driven feature extraction strategy and its application in looseness detection of rotor-bearing system. Mathematics 11: 2769
Goyal D, Chaudhary A, Dang R K, Pabla B and Dhami S 2018 Condition monitoring of rotating machines: a review. World Sci. News 113: 98–108
Frank P M 1996 Analytical and qualitative model-based fault diagnosis–a survey and some new results. Eur. J. Control 2: 6–28
Zhuge J 2009 Vibration data collector signal analysis. Part of VDC User’s Manual, CRYSTAL instrument
Doebling S W, Farrar C R and Prime M B 1998 A summary review of vibration-based damage identification methods. Shock Vib. Digest 30: 91–105
Giurgiutiu V 2002 Current issues in vibration-based fault diagnostics and prognostics. In: Smart Nondestructive Evaluation for Health Monitoring of Structural and Biological Systems, pp. 101–112
Carden E P and Fanning P 2004 Vibration based condition monitoring: a review. Struct. Health Monit. 3: 355–377
Peng Z K and Chu F 2004 Application of the wavelet transform in machine condition monitoring and fault diagnostics: a review with bibliography. Mech. Syst. Signal Process. 18: 199–221
Nandi S, Toliyat H A and Li X 2005 Condition monitoring and fault diagnosis of electrical motors—a review. IEEE Trans. Energy Convers. 20: 719–729
Lu B, Li Y, Wu X and Yang Z 2009 A review of recent advances in wind turbine condition monitoring and fault diagnosis. In: IEEE Power Electronics and Machines in Wind Applications, pp. 1–7
Do V T and Chong U-P 2011 Signal model-based fault detection and diagnosis for induction motors using features of vibration signal in two-dimension domain. J. Mech. Eng. 57: 655–666
Lei Y, Lin J, Zuo M J and He Z 2014 Condition monitoring and fault diagnosis of planetary gearboxes: a review. Measurement 48: 292–305
Giantomassi A, Ferracuti F, Iarlori S, Ippoliti G and Longhi S 2015 Signal based fault detection and diagnosis for rotating electrical machines: issues and solutions. In: Complex System Modelling and Control Through Intelligent Soft Computations, pp. 275–309
Gao Z, Cecati C and Ding S X 2015 A survey of fault diagnosis and fault-tolerant technique-Part I: fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Elect. 62: 3757–3767
De Azevedo H D M, Araújo A M and Bouchonneau N 2016 A review of wind turbine bearing condition monitoring: state of the art and challenges. Renew. Sustain. Energy Rev. 56: 368–379
Wu C, Guo C, Xie Z, Ni F and Liu H 2018 A signal-based fault detection and tolerance control method of current sensor for PMSM drive. IEEE Trans. Ind. Electron. 65: 9646–9657
Salameh J P, Cauet S, Etien E, Sakout A and Rambault L 2018 Gearbox condition monitoring in wind turbines: a review. Mech. Syst. Signal Process. 111: 251–264
Dai J, Tang J, Huang S and Wang Y 2019 Signal-based intelligent hydraulic fault diagnosis methods: review and prospects. Chin. J. Mech. Eng. 32: 1–22
Park Y-J, Fan S-KS and Hsu C-Y 2020 A review on fault detection and process diagnostics in industrial processes. Processes 8: 1123
Gangsar P and Tiwari R 2020 Signal based condition monitoring techniques for fault detection and diagnosis of induction motors: a state-of-the-art review. Mech. Syst. Signal Process. 144: 106908
Abid A, Khan M T and Iqbal J 2021 A review on fault detection and diagnosis techniques: basics and beyond. Artifi. Intel. Rev. 54: 3639–3664
Kumar R, Ismail M, Zhao W, Noori M, Yadav A R and Chen S et al. 2021 Damage detection of wind turbine system based on signal processing approach: a critical review. Clean Technol. Environ. Policy 23: 561–580
Tiboni M, Remino C, Bussola R and Amici C 2022 A review on vibration-based condition monitoring of rotating machinery. Appl. Sci. 12: 972
Mutra R R, Reddy D M, Srinivas J, Sachin D and Rao K B 2023 Signal-based parameter and fault identification in roller bearings using adaptive neuro-fuzzy inference systems. J. Braz. Soc. Mech. Sci. Eng. 45: 45
Boztas G 2023 Comparison of acoustic signal-based fault detection of mechanical faults in induction motors using image classification models. Trans. Inst. Meas. Control. https://doi.org/10.1177/01423312231171664
Alharbi F, Luo S, Zhang H, Shaukat K, Yang G and Wheeler C A et al. 2023 A brief review of acoustic and vibration signal-based fault detection for belt conveyor idlers using machine learning models. Sensors 23: 1902
Rao B K N 1996 Handbook of Condition Monitoring. Elsevier, USA
Davies A 2012 Handbook of Condition Monitoring: Techniques and Methodology. Springer, Dordrecht
Mohanty A R 2014 Machinery Condition Monitoring: Principles and Practices. CRC Press, Boca Raton
Correa J C A J and Guzman A A L 2020 Mechanical Vibrations and Condition Monitoring. Academic Press
Collacott R 2012 Mechanical Fault Diagnosis and Condition Monitoring. Springer, Dordrecht
Sinha J K 2020 Industrial Approaches in Vibration-Based Condition Monitoring. CRC Press, Boca Raton
Rao J 2000 Vibratory Condition Monitoring of Machines. CRC Press, Boca Raton
Randall R B 2021 Vibration-Based Condition Monitoring: Industrial, Automotive and Aerospace Applications. Wiley, Hoboken
Ahmed H and Nandi A K 2020 Condition Monitoring with Vibration Signals: Compressive Sampling and Learning Algorithms for Rotating Machines. Wiley, Hoboken
Beebe R S and Beebe R S 2004 Predictive Maintenance of Pumps using Condition Monitoring. Elsevier, Amsterdam
Tiwari R 2023 Simple Rotor Analysis Through Tutorial Problems. CRC Press, Boca Raton
Marwala T 2012 Condition Monitoring Using Computational Intelligence Methods: Applications in Mechanical and Electrical Systems. Springer, London
Barszcz T 2019 Vibration-Based Condition Monitoring of Wind Turbines. Springer, Cham
Tavner P, Ran L, Penman J and Sedding H 2008 Condition Monitoring of Rotating Electrical Machines. Institution of Engineering and Technology, Stevenage
Bachschmid N and Pennacchi P 2003 Accuracy of fault detection in real rotating machinery using model based diagnostic techniques. JSME Int. J. Ser. C Mech. Syst. Mach. Elements Manuf. 46: 1026–1034
Patton R J 1994 Robust model-based fault diagnosis: the state of the art. IFAC Proc. 27: 1–24
Patton R, Chen J and Nielsen S 1995 Model-based methods for fault diagnosis: some guide-lines. Trans. Inst. Meas. Control 17: 73–83
Simani S, Fantuzzi C and Patton R J 2003 Model-based fault diagnosis techniques. In: Model-based Fault Diagnosis in Dynamic Systems Using Identification Techniques, Springer, pp. 19–60
Kumar P and Tiwari R 2023 A review: multiplicative faults and model-based condition monitoring strategies for fault diagnosis in rotary machines. J. Braz. Soc. Mech. Sci. Eng. 45: 282
Rapur J S and Tiwari R 2017 Experimental time-domain vibration-based fault diagnosis of centrifugal pumps using support vector machine. ASCE ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 3: 044501
Rapur J S and Tiwari R 2019 On-line time domain vibration and current signals based multi-fault diagnosis of centrifugal pumps using support vector machines. J. Nondestr. Eval. 38: 1–18
Kumar S, Lokesha M, Kumar K and Srinivas K 2018 Vibration based fault diagnosis techniques for rotating mechanical components. In: IOP Conference Series: Materials Science and Engineering, p. 012109
Srilakshmi R and Ratnam C 2019 A review on fault detection, diagnosis and prognosis, in vibration measurement through wavelets on machine elements. Int. J. Appl. Eng. Res. 14: 547–555
Gangsar P and Tiwari R 2019 Diagnostics of mechanical and electrical faults in induction motors using wavelet-based features of vibration and current through support vector machine algorithms for various operating conditions. J. Braz. Soc. Mech. Sci. Eng. 41: 1–25
Gangsar P and Tiwari R 2019 Online diagnostics of mechanical and electrical faults in induction motor using multiclass support vector machine algorithms based on frequency domain vibration and current signals. ASCE ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 5: 031001
Nasiri S, Khosravani M R and Weinberg K 2017 Fracture mechanics and mechanical fault detection by artificial intelligence methods: a review. Eng. Fail. Anal. 81: 270–293
Liu R, Yang B, Zio E and Chen X 2018 Artificial intelligence for fault diagnosis of rotating machinery: a review. Mech. Syst. Signal Process. 108: 33–47
Wei Y, Li Y, Xu M and Huang W 2019 A review of early fault diagnosis approaches and their applications in rotating machinery. Entropy 21: 409
Lang W, Hu Y, Gong C, Zhang X, Xu H and Deng J 2021 Artificial intelligence-based technique for fault detection and diagnosis of EV motors: a review. IEEE Trans. Transp. Electrifi. 8: 384–406
Saini K, Dhami S and Vanraj 2022 Predictive monitoring of incipient faults in rotating machinery: a systematic review from data acquisition to artificial intelligence. Arch. Comput. Method Eng. 29: 4005–4026
Singh V, Gangsar P, Porwal R and Atulkar A 2023 Artificial intelligence application in fault diagnostics of rotating industrial machines: a state-of-the-art review. J. Intell. Manuf. 34: 931–960
Edwards S, Lees A and Friswell M 2000 Experimental identification of excitation and support parameters of a flexible rotor-bearings-foundation system from a single run-down. J. Sound Vib. 232: 963–992
Alves D S and Cavalca K L 2021 Investigation into the influence of bearings nonlinear forces in unbalance identification. J. Sound Vib. 492: 115807
Nayek B, Das A and Dutt J 2021 Model based estimation of inertial parameters of a rigid rotor having dynamic unbalance on Active Magnetic Bearings in presence of noise. Appl. Math. Model. 97: 701–720
Kumar P, Sanket M, Srivastav S and Madav T D 2023 Vibrational nature of an unbalanced rigid rotor system with three discs secured by two active magnetic bearings. In: Recent Advances in Material: Select Proceedings ICSTE 2023, Springer, pp. 335–345
Bachschmid N, Pennacchi P, Tanzi E and Vania A 2000 Identification of transverse crack position and depth in rotor systems. Meccanica 35: 563–582
Kumar P, Arambam C, Singh L D and Singh N D 2023 Analysing the dynamic interaction between unbalance and crack responses in a Jeffcott rotor supported by foil bearings: a numerical study. In: Emerging Trends in Mechanical and Industrial Engineering: Select Proceedings ICETMIE 2022, Springer, pp. 971–980
Hori Y and Uematsu R 1980 Influence of misalignment of support journal bearings on stability of a multi-rotor system. Tribol. Int. 13: 249–252
Xu M and Marangoni R 1994 Vibration analysis of a motor-flexible coupling-rotor system subject to misalignment and unbalance, part II: experimental validation. J. Sound Vib. 176: 681–691
Nejadpak A and Yang C X 2017 Misalignment and unbalance faults detection and identification using KNN analysis. Proc. CANCAM 2017: 1–4
Srinivas R S, Tiwari R and Kannababu C 2019 Model based analysis and identification of multiple fault parameters in coupled rotor systems with offset discs in the presence of angular misalignment and integrated with an active magnetic bearing. J. Sound Vib. 450: 109–140
Kumar P and Tiwari R 2020 Dynamic response analysis of an unbalanced and misaligned rotor supported on active magnetic bearings and touchdown bearings. In: Proceedings of the 6th National Symposium on Rotor Dynamics, pp. 407–418
Kumar P and Tiwari R 2020 Effects of unbalance and AMB misalignment in a rigid rotor with an offset disc levitated by active magnetic bearings: a numerical investigation. In: 12th International Conference on Vibrations in Rotating Machinery, pp. 151–168
Kumar P and Tiwari R 2023 Identification in a magnetically levitated rigid rotor system integrated with misaligned sensors and active magnetic bearings. In: Vibration Engineering and Technology of Machinery: Select Proceedings VETOMAC XVI 2021 vol. 1, Springer, pp 1–24
Shiau T N and Lee E K 1989 The residual shaft bow effect on dynamic response of a simply supported rotor with disk skew and mass unbalances. J. Vib. Acoust. Stress Reliab. Des. 111: 170–178
Shiau T, Lee E, Chen Y and Young T 2006 Dynamic response of a geared rotor-bearing system under residual shaft bow effect. In: Turbo Expo: Power for Land, Sea, and Air, pp. 1225–1231
Yu P, Wang C, Hou L and Chen G 2022 Dynamic characteristics of an aeroengine dual-rotor system with inter-shaft rub-impact. Mech. Syst. Signal Process. 166: 108475
Zhang X, Yang Y, Shi M, Zhang Y and Wang P 2022 An energy track method for early-stage rub-impact fault investigation of rotor system. J. Sound Vib. 516: 116545
Mathew J and Alfredson R 1984 The condition monitoring of rolling element bearings using vibration analysis. J. Vib. Acoust. Stress Reliab. Des. 106: 447–453
Tandon N 1994 A comparison of some vibration parameters for the condition monitoring of rolling element bearings. Measurement 12: 285–289
Tandon N, Yadava G and Ramakrishna A K 2007 A comparison of some condition monitoring techniques for the detection of defect in induction motor ball bearings. Mech. Syst. Signal Process. 21: 244–256
Kim Y-H, Tan A C and Kosse V 2008 Condition monitoring of low-speed bearings—a review. Aus. J. Mech. Eng. 6: 6–68
Craig M, Harvey T, Wood R, Masuda M, Kawabata M and Powrie H 2009 Advanced condition monitoring of tapered roller bearings, Part 1. Tribol. Int. 42: 1846–1856
KiranKumar M, Lokesha M, Kumar S and Kumar A 2018 Review on condition monitoring of bearings using vibration analysis techniques. In IOP Conference Series: Materials Science and Engineering, p. 012110
Abdeljaber O, Sassi S, Avci O, Kiranyaz S, Ibrahim A A and Gabbouj M 2018 Fault detection and severity identification of ball bearings by online condition monitoring. IEEE Trans. Ind. Electron. 66: 8136–8147
Duque-Perez O, Del Pozo-Gallego C, Morinigo-Sotelo D and Fontes Godoy W 2019 Condition monitoring of bearing faults using the stator current and shrinkage methods. Energies 12: 3392
Moshrefzadeh A 2021 Condition monitoring and intelligent diagnosis of rolling element bearings under constant/variable load and speed conditions. Mech. Syst. Signal Process. 149: 107153
Schwendemann S, Amjad Z and Sikora A 2021 A survey of machine-learning techniques for condition monitoring and predictive maintenance of bearings in grinding machines. Comput. Ind. 125: 103380
Kahr M, Kovács G, Loinig M and Brückl H 2022 Condition monitoring of ball bearings based on machine learning with synthetically generated data. Sensors 22: 2490
Euldji R, Bouamhdi M, Rebhi R, Bachene M, Ikumapayi O M, Al-Dujaili A Q, Abdulkareem A I, Humaidi A J and Menni Y 2023 Optimizing condition monitoring of ball bearings: an integrated approach using decision tree and extreme learning machine for effective decision-making. Open Phys. 21: 20220239
Kumar A, Kumar R, Tang H and Xiang J A 2024 comprehensive study on developing an intelligent framework for identification and quantitative evaluation of the bearing defect size. Reliab. Eng. Syst. Saf. 242: 109768
Luo M, André H, Guo Y and Peng Y 2024 Analysis of contact behaviours and vibrations in a defective deep groove ball bearing. J. Sound Vib. 570: 118104
Postlethwaite S, Allen J and Ford D 1999 Machine tool thermal error reduction—an appraisal. Proc. Inst. Mech. Eng. Part B: J. Eng. Manuf. 213: 1–9
Creighton E, Honegger A, Tulsian A and Mukhopadhyay D 2010 Analysis of thermal errors in a high-speed micro-milling spindle. Int. J. Mach. Tool. Manuf. 50: 386–393
Mayr J, Jedrzejewski J, Uhlmann E, Donmez M A, Knapp W, Härtig F, Wendt K, Moriwaki T, Shore P, Schmitt R, Brecher C, Würz T and Wegener K 2012 Thermal issues in machine tools. CIRP Ann. 61: 771–791
Li Y, Zhao W, Lan S, Ni J, Wu W and Lu B 2015 A review on spindle thermal error compensation in machine tools. Int. J. Mach. Tool. Manuf. 95: 20–38
Ma C, Zhao L, Mei X, Shi H and Yang J 2017 Thermal error compensation based on genetic algorithm and artificial neural network of the shaft in the high-speed spindle system. Proc. Inst. Mech. Eng. Part B: J. Eng. Manuf. 231: 753–767
Li Y, Dai Y, Gao Y, Tao X and Wang G 2023 Review on thermal error suppression and modeling compensation methods of high-speed motorized spindle. Recent Patents Eng. 17: 60–76
Haoshuo W, Guangsheng C and Yushan S 2023 Prediction of thermal errors in a motorized spindle in CNC machine tools by applying loads based on heat flux. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 238: 264
Friedrich C, Geist A, Yaqoob M F, Hellmich A and Ihlenfeldt S 2024 Correction of thermal errors in machine tools by a hybrid model approach. Appl. Sci. 14: 671
Kumar P 2023 Condition monitoring of mechanical and electrical faults in stationary and rotating equipments: a review. in Recent Advances in Material: Select Proceedings ICSTE 2023, Springer, pp. 297–306
Acknowledgements
Not applicable.
Funding
This research has not received any research funding.
Author information
Authors and Affiliations
Contributions
The first author contribution is 65% (compilation of whole manuscript and interpretation, and making draft version of the paper) and the second author contribution is 35% (In generation of idea, supervision of work, and fine tuning the paper).
Corresponding author
Ethics declarations
Competing interests
There are no competing interests.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kumar, P., Tiwari, R. Additive fault diagnosis techniques in rotor systems: a state-of-the-art review. Sādhanā 49, 207 (2024). https://doi.org/10.1007/s12046-024-02543-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12046-024-02543-7