
Abstract
Background
The ecological study of root systems lags behind the understanding of the aboveground components of plant communities, mainly due to methodological challenges. As ecological root theory develops complexity, root investigation methods are required to meet higher standards of quantitative and detailed data.
Scope
Spatial root density distribution of plants represents one of the main features pursued in ecological studies, as it provides insight into root foraging behavior and belowground competition. To study root density, ecologists should preferably use and develop methods with the potential to provide the most comprehensive information: Individual Root Density Distribution (IRDD), i.e. individual-level and spatially-explicit root density maps. Here, we review the existing methods to detect roots in the field (detection methods), and to infer the identity of these roots (identification methods). We discuss potential combinations of Detection and Identification (DI) methods, and the data quality that these combinations yield in respect to IRDD.
Conclusion
We anticipate that root field ecologists progressively may want to adopt DI methods showing the highest potential to provide high-quality IRDD. These methods are (i) ground-penetrating radar or acoustic tomography in combination with tracking the roots to the individual plant (i.e. skeleton method sensu lato), (ii) soil sampling in combination with in situ root staining (for physiological individuals), or (iii) soil sampling in combination with DNA microsatellites or single nucleotide polymorphism sequencing (for genetic individuals).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Scientists have been intrigued by the study of plant roots for over two millennia, since Theophrastus defined ‘rhizai’ –the organ plants use to get nutrients and moisture from the soil– in his “Historia Plantarum” (Pennazio 2014). Concretely, the ecological study of root architecture and how plant roots distribution responds to soil resources and the presence of competitors also knows a long history. For instance, in a series of natural history observations, Knight (1811) highlighted the importance of soil nutrients in driving the growth of the complete root system of trees. Later, Fricke (1904) studied how plants responded belowground to competing neighbors, using trenching experiments to free trees from competitive pressure. Both insights led to the current understanding that plants adjust their carbon allocation to roots (Enquist and Niklas 2002; O’Brien et al. 2005) and their root distribution ranges in soil (Schenk et al. 1999; Schenk and Jackson 2002) in response to soil-resource availability and resource competition with neighbors (Cahill et al. 2010). Further deepening our understanding of root systems is necessarily based on field empirical observations (Bardgett et al. 2014). However, obtaining field observations of roots remains particularly challenging, and contemporary plant ecologists are still confronted by this methodological conundrum (Lux and Rost 2012).
Plant ecological theory is based on mechanisms that remain largely misunderstood, and shedding light on these mechanisms is timely. To that end, ecologists need to better understand the biophysical processes mediating the biotic interactions among plants, which requires focusing on the individual plants, and incorporating the spatial structure of the plant community (Cabal et al. 2020a). In the case of the aboveground, understanding individual plants growth in space has proved fundamental to that end. Tree architecture models and studies have investigated the three-dimensional configuration of plant stems and leaves that optimize light interception, water balance, or mechanical stability (Pearcy et al. 2005; Eloy et al. 2017). However, studying the root systems in plant communities in a spatially-explicit context, while keeping track of the plant individuals to which those roots belong, is particularly challenging.
Additionally, recent theory –the exploitative segregation of plant roots (Cabal et al. 2020b)– demonstrated that a more comprehensive approach to studying the spatial structure of the root density of individual plants is essential to understand plant-soil resource foraging and competition. The exploitative segregation of plant roots predicts, from a game theory approach, that, in response to the local presence of non-self roots, plants will overproliferate roots in their closest surroundings, yet they will under-proliferate roots far away from their stem, hence segregating. The balance between both simultaneous local responses explains that plants can both over- and under-invest in roots when facing competition. This plant allocation-strategy shift depends exclusively on the spatial structure of the plant community, and more concretely on the distance separating the competing plant individuals. Beyond the specific predictions of the theory, which still need further validation, a key point made in Cabal et al. (2020b) is that both alternative approaches, the root distribution, and the allocation into roots, provide incomplete results that must be interpreted with caution. Such results can be reconciled and fully understood by considering the study of individual plants’ root density distribution maps (IRDD)[1], see glossary which provide an integrative measure of an individual plant’s spatial root range and belowground allocation strategy.
Despite increasing importance to further our understanding of plant root ecology, there is an apparent lack of consensus on a standard approach to obtain high-quality IRDD data. While IRDD of interacting plants has been successfully mapped in experimental setups (Cabal et al. 2020b), it has to our knowledge never been done in the field. However, regardless of the nature of the setup, a comprehensive method allowing the generation of IRDD maps must meet three basic requirements: (i) link root samples to plant individuals, (ii) be fully spatially-explicit, and (iii) incorporate root density[2] measures.
Through time, several seminal books (Schuurman and Goedewaagen 1971; Böhm 1979a; Smit et al. 2000; Mancuso 2012) and review papers (Nadezhdina and Čermák 2003; Maeght et al. 2013; Addo-Danso et al. 2016; Alani and Lantini 2019) have tackled the possible solutions that technology provides to study plant roots, but not specifically to obtain IRDD data in the field. In this review, we first present a novel classification of the existing methodologies, differentiating root detection methods[3] from root identification methods[4], and then assess how these can be combined in Detection-Identification (DI) methods[5]. The goal of our review is to present DI methods that provide, or have the potential to provide, IRDD maps in the field, and hence contribute towards the development of standardized methods for the field study of plant root density distribution in the soil.
Root detection methods
Extraction methods
The earliest existing root detection methods[3] are those in which root fragments are physically extracted from the soil (Fig. 1).

Schematic representation of the leading root detection methods[3] and identification methods[4]
Excavation and trenches
By making a hole with a shovel or hoe and detaching the roots from the soil, researchers can detect the presence of roots, extract root fragments, and analyze root anatomy (Böhm 1979b). Some techniques have been developed to facilitate the full excavation of root systems, such as hydraulic excavation (Stoeckeler and Kluender 1938) or pneumatic excavation (Rizzo and Gross 2000). Trenching is a common excavation procedure that facilitates the extraction of soil samples[6] such as monoliths or horizontal cores from different soil depths (Sekiya et al. 2013). Trenching is also often used as a method that allows examining roots in trenched soil walls (Böhm 1979c) and is particularly useful to examine the range of deep roots (Maeght et al. 2013).
Soil samples
Many soil sample extraction techniques have been developed for the study of roots. For instance, monolith excavation consists of extracting the whole root system of an individual plant in a block of soil (Nelson and Allmaras 1969). It does not provide root spatial distribution information unless the monolith is itself subsampled (Böhm 1979d). Several techniques for extracting monoliths exist, such as the pin-board method, which involves fastening a wooden board to a trench’s surface using long nails, thereby extracting a monolith (Maschhaupt 1915). In general, monolith methods are logistically consuming, as they require relatively large excavations in order to extract the samples.
Extracting a cylinder-shaped mass of material (i.e. a core) is the most widespread among the soil sampling techniques. Cores can be extracted from the soil without conducting large excavations, making this a fast and cheap method where more replicates can be obtained with less effort. Core extraction tools are diverse but usually based on rotation or percussion forces facilitating the insertion of a coring device (corer) in the soil. Simple hand-operated Auger corers are commonly used in root studies (Schuurman and Goedewaagen 1971; Böhm 1979a). However, these devices do not perform well in hard or stony soils, or when pursuing the extraction of wide, woody roots. Additionally, these corers usually extract small soil samples, typically in the range of 5 cm diameter and 20 cm deep, potentially compromising the sampled volume and the representativeness of the sample (Taylor et al. 2013).
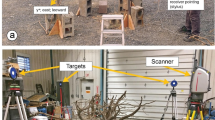
The logistical limitations of soil coring can be overcome by using heavy truck-mounted machinery and autonomous robots (Bar-Cohen and Zacny 2009), as is often done for geological, oceanographic, petrological, and astronomical exploration. Coring machinery is less appealing for the ecological field, as they are expensive tools, and difficult to bring into natural and forested systems. While there is a gap between these two groups of coring devices, and very few non-truck-mounted, affordable, mechanical coring devices exist, some mechanical handy devices exist. For instance, some root researcher have used gasoline powered jackhammers to effectively extract cores by percussion in frozen soils (Tarnocai 1993), or compacted clays of tropical acrisols (Stahl et al. 2013). Alternatively, diamond core drilling machines designed for the construction industry have been used to extract soil cores by rotation in Mediterranean granitic ranker soils (Cabal et al., unpublished, see Fig. 2a), and are capable of drilling through rocks.

Photographies from unpublished (Cabal et al.) ecological fieldwork showing the use of a- a construction diamond drilling machine for extracting soil cores by rotation, and b- woody roots of three species of Mediterranean shrubs stained in situ in different colors for their identification
Observation methods
Observation methods are those that allow visualizing the root fragments in the soil, without extracting them. By visualizing, in the broader sense, we refer to using technologies to directly (with the naked eye) or indirectly observe the root fragments (Fig. 1).
Rhizotron systems
Among the rhizotron[7] systems or soil windows (Wolfgang Böhm 1979), the minirhizotron is probably the most successful: transparent PVC tubes buried in the soil that function as a tubular window. Minirhizotron tubes support scanning of the surrounding soil surface and roots via adapted digital cameras that can be lowered in these tubes (Klepper and Kaspar 1994; Rewald and Ephrath 2013). Minirhizotron systems have predominantly been used in controlled conditions, yet their application to field studies is becoming increasingly popular and affordable (Arnaud et al. 2019).
However, root ecologists ascribe several limitations to this method. First of all, the natural behavior of roots is likely modified by encountering the solid plastic surface of the minirhizotron system (Semchenko et al. 2007; Bizet et al. 2016), potentially altering the observed root density[2] and traits. Another limitation of minirhizotrons is that their small diameter and cost-limited replicability severely compromise soil sample representativeness (Taylor et al. 2013), in particular for wide roots. Finally, these systems do not allow researchers to obtain root density measures, as the observation is made in the plane, and soil volume is inaccessible. While the usefulness of rhizotron systems in acquiring data on root anatomy and root function is beyond argument (see Withington et al. 2006), its use as a tool to develop IRDD[1] data is quite limited for all the reasons listed above.
Tomography based on electromagnetic waves
In the field of plant root ecology, a wide array of tomography[8] techniques exists for inferring root systems’ spatial distribution based on different physical properties that can be measured in the intact soil. Generally speaking, tomography methods are non-intrusive, as they do not significantly alter the soil or roots within, and repeated measures can be made over time, tracking the growth of a root system.
Tomography based on the emission of electromagnetic waves of different frequencies represents one of the most revolutionary root detection methods[3] (Wasson et al. 2020). Concretely, radar waves (0.4–2.6 GHz) have proved most successful in natural conditions, where the emitted signal is selectively reflected by some soil components and can be thereafter detected by receiving antennas (Guo et al. 2013). Ground-penetrating radar (GPR) tomography is probably the oldest root tomography technique developed (Hruska et al. 1999) but has turned into a very popular method for mapping the roots of trees in wild and urban environments (Zenone et al. 2008a).
While it has been extensively used for over two decades, recent studies have highlighted several limitations of GPR tomography. Specifically, the technique gets progressively less reliable with decreasing root diameters, increasing soil depth, decreasing root volumetric water content, increasing soil moisture, presence of organic litter, and when roots are located closer to one another or to the tree stump (Hirano et al. 2009; Butnor et al. 2016; Rodríguez-Robles et al. 2017). However, the development of this technology has the potential to overcome at least some of these problems (Bassuk et al. 2011; Alani and Lantini 2019). For instance, scanning vertical profiles in pits using GPR can provide more accurate vertical profiles of root distribution (Butnor et al. 2012).
Tomography based on acoustic waves
Acoustic tomography[8] was mainly applied in forestry for the detection of decay and holes in tree stems (Divos and Szalai 2002). However, the velocity and amplitude of the sound waves can be used to discriminate roots from the soil (Mary et al. 2015). The principle underlying this technique is that acoustic waves travel at different speeds through different media, which is typically high in healthy roots (2000–4000 m s−1) and much lower in the air (343 m s−1) or soil (<700 m s−1) (Bucur 2006; Mary et al. 2015; Alani and Lantini 2019). In practice, the shorter travel time of a sound pulse, traveling between the transmitter at the stem base and the spike-shaped receiver in the soil, informs on the vicinity of roots.
In preliminary field tests of this method, circular sampling setup around the stem of trees allowed researchers to map the spatial position of the thick roots of individual trees up to a depth of 50 cm and with of 120 cm distance from the trunk (Buza and Divós 2016; Proto et al. 2020). While these tests of the method are still preliminary, the technique is very promising as a potential alternative to GPR tomography. So far, the reported limitations are that it works only for thick roots (diameter > 4 cm), the space between individual roots must be at least 20 cm to guarantee distinctive signals, and the acoustic sound is also transmited by concrete, pipes, or rocks, in a way that is undiscernible with roots, limiting the applicability of the method in urban and stony soils (Buza and Divós 2016 and references therein). Nevertheless, the method also has a few advantages over GPR tomography; it presents a cheaper technique, free from signal noise resulting from soil moisture and soil organic matter, and producing plant individual-level information (i.e. only roots of one targeted focal individual are detected) (Buza and Divós 2016; Proto et al. 2020).
Inference methods
Inference methods do not require extracting nor visualizing the roots in the soil, but rather allow researchers to indirectly infer their presence and relative abundance through the measure of a signal that is used as a proxy for their occurrence (Fig. 1).
Methods based on root function - stable water isotopes
Gradients in the soil water isotopic composition with depth can establish naturally by several environmentally-driven processes (Dansgaard 1964; Gat 2010) or can be imposed artificially by manual enrichment of the soil (Stahl et al. 2013). The pioneering work of Ehleringer and Dawson (1992) describes how stable water isotopic composition (δ2H and δ18O) of xylem water in plants is relatable with the stable water isotopic contribution of their hydric resources. Isotopic labeling of a specific water source supports validation if the labeled source is accessed by the plant, e.g. this enables the study of deep roots by labeling the water in deeper soil layers (Stahl et al. 2013). Therefore, a gradient in soil water isotopic composition with depth can allow the characterization of vertical root water uptake profiles (Sprenger et al. 2016). While the technique does not assess root density spatial distribution, it can provide an approximation of absorptive root area distribution with depth (Ogle et al. 2004).
In general, stable water isotopic tracer techniques can be used to extract root function data (i.e. information about roots that are physiologically active at the time of sampling), complementing IRDD[1] and facilitating a more integrated view on the functionality and plasticity of a plant’s root system. However, the current debate in the literature (Penna et al. 2018) calls for cautious use and interpretation of the technique as several studies indicate obscured interpretation and hindering of inverse modeling endeavors by (i) the presence of root level isotopic fractionations, i.e. processes that cause a shift in the relative abundances of the water isotopologues driven by their differences in molecular mass, which has so far been attributed to mycorrhizal activity (Poca et al. 2019) and other unknown reasons (Zhao et al. 2016), (ii) the potential widespread occurrence of δ2H-offsets in plants (Barbeta et al. 2019, 2020), (iii) the excessive time lag in signature transport within a plant (Magh et al. 2020), and (iv) pronounced variance in xylem water isotopic composition with plant height and in time (De Deurwaerder et al. 2020). New developments of in situ sampling approaches show high potential to overcome these hindrances (Volkmann et al. 2016; Marshall et al. 2020) and might propel implementation, use, and understanding of the stable water isotopic technique. However, whether these new developments could support the collection of high-quality IRDD data remains questionable.
Electric capacitance (or electric resistance)
Chloupek (1972) was the first to highlight the potential of performing a rapid, cheap, and non-intrusive root assessment using electric capacitance on potted plants. Root cells and their content present an electric barrier between highly conductive xylem and soil media (Chloupek 1977; van Beem et al. 1998). Hence, the root membrane (i.e. the cell membrane of various root cells in the epidermis and cortex around the Casparian strip) function as an imperfect electric capacitor which alters the amplitude and phase of an alternating current imposed over a plant-soil electric circuit (AC, generally 1 kHz) (Ellis et al. 2013). Species-specific linear relationships allow qualitative estimates of the total dry root mass (Chloupek 1972) and also correlate with other root anatomical traits such as root length and root surface area (Preston et al. 2004; Cao et al. 2011). Dalton (1995) proposed a conceptual model that builds on these observations by integrating electrical capacitance responses of a plant by considering roots to resemble leaky capacitors within an electrical circuit, a theoretical framework further developed by Ellis et al. (2013). Daltons’ model facilitates understanding of the empirical observed linear relationships and advances the potential of electric capacitance to be adapted as a tomography[8] technique (Liao et al. 2015), as discussed below.
However, the implementation and accuracy of Daltons’ model have been contested by Dietrich et al. (2012, 2013) who hypothesized that electric capacitance correlates with a plants’ stem-cross sectional area rather than with its total dry root mass, as was originally proposed. Consequently, since the underlying mechanisms of the observed plant responses is potentially misrepresented, associated erroneous interpretation of observations and root biomass estimations via Daltons’ model are plausible. In addition, the high sensitivity of the technique concerning soil water content, soil texture, and ionic composition, and the position and the size of the plant electrode all confound the accuracy of the estimate and call into question the usability of this technique in the field (Ozier-Lafontaine and Bajazet 2005; Aulen and Shipley 2012; Postic and Doussan 2016). These challenges need to be overcome to validate and allow the application of electric capacitance in more complex field studies, and to allow the comparison of plants experiencing different growth conditions.
Tomography based on electric currents
Differences in the electrical responses of plant tissues and the soil matrix to imposed electrical currents facilitate the indirect study of root systems (Zenone et al. 2008a; Amato et al. 2009). Specifically, the technique supports observation of (i) the electrical responses of roots mediated by the high electrical resistivity of their cell walls (Čermák et al. 2006; Al Hagrey 2007), and (ii) the frequency-dependent polarization and relaxation properties of the double-layered root membrane (Lyklema 2005; Weigand and Kemna 2017; Cseresnyés et al. 2018a). Generally, the basic setup consists of a single or multi-frequency current flowing from a set of injection points (i.e. electric electrodes) towards a set of monitoring points (i.e. the potential electrodes). The shape of the emerging electrical fields between these electrodes depends on the cumulative flow resistivity and/or impedance responses experienced along the currents’ pathway through the soil and/or root media. Subsequently, this basic setup is repeated with stepwise modification of pathway length, direction, and current frequency according to the selected electrode configuration approach (e.g. as reviewed by Samouëlian et al. 2005), and alterations in the electrical fields are studied. The selection of the electrode configuration is important as it influences both the resolution and sensitivity of the two- or three-dimansional tomography[8]. These tomographic images are the result of the obtained measurements via tomographic inversion algorithms.
Three major subcategories in electrical tomography can be distinguished based on the studied electric response (i.e. resistivity vs impedance) and the electrode configuration considered: (i) Electric resistivity (ER) tomography targets the study of in-phase resistivity, with electric flow injection in the soil medium (Staněk 1997; Aubrecht et al. 2006; Amato et al. 2009, 2010). (ii) Mise-à-la-Masse describes a similar setup to ER tomography, but the electrical current is applied to the plant rather than to the soil (Mary et al. 2018; Corona-Lopez et al. 2019). (iii) Electrical impedance tomography observes dielectric polarization responses and/or relaxation time of the double-layered root membrane evoked by the external electric fields (Lyklema 2005; Cseresnyés et al. 2018b).
The interpretation of electrical tomography remains challenging, as measurements can be obscured by many soil features such as the nature of solid constituents, soil pore composition, or the ionic solution of the soil medium, just to name a few (Samouëlian et al. 2005). In addition, the resolution of detectable root size is limited, i.e. > 2 cm, although better resolution might be obtained by increasing the electrical frequency (Butnor et al. 2001, 2003). Electrical tomography shows, however, high promise in acquiring noninvasive insights in absorbing root surface area (Čermák et al. 2006), and its applicability in field conditions will become more apparent once we are able to overcome its current limitations.
Root identification methods
While some root detection methods[3] intrinsically provide individual-level information –namely electric capacitance, water isotopes, acoustic tomography[8], and most electric tomography modalities–, the extractive detection methods[3], rhizotron, GPR tomography and ER tomography are detection techniques that provide community-level information of root systems, i.e. information about the total presence and/or density of roots for all the plants present nearby the sample. Root identification methods[4] are technologies developed to link a root fragment detected in the soil to a plant species or individual. In this section, we review the existing methodologies that allow plant researchers to cope with root identification from soil samples[6], rhizotron[7] imagery, or GPR tomography (Fig. 1).
An important consideration to keep in mind when selecting an individual-level identification method[4] is the fundamental difference existing between physiological[9] and genetic individuals[10]. The complexity in defining what is a discrete plant individual was already tackled by early plant population ecologists (Harper 1977). Indeed, many plants are clonal, as they can reproduce asexually through root sprouting, rhizomes, or other types of propagation (Barrett 2015). Whether individuals are defined as genetic or physiological often involves fundamental ecological consequences (Falik et al. 2006). Most methods presented here refer to the identification of physiological individuals, whereas those presented in Section 2.3 refer to genetic individuals. Note that one may find different results when identifying plant fragments in the field using genetic or physiological individual-level methods, hence it is crucial to consider this before selecting an adequate method to test a given scientific question.
The skeleton method (sensu lato)
Excavating integrally the root system of an individual plant by following its roots (the skeleton method) is probably the oldest method used in root systems research (Hales 1727). The skeleton method provides the most comprehensive information: a complete map of the roots of plant individuals. While Böhm (1979b) defined the skeleton method (sensu stricto) as excavating the individual roots in the soil surroundings (therefore a detection method[3]), we consider it more adequate to include it as an identification method[4]. Indeed, one can use several different excavation techniques (e.g. shovel, pneumatic, hydraulic), while the essence of the skeleton method is that, by tracking the roots, one can link them to the physiological individual[9] to which they belong. Moreover, while this method has traditionally been associated with excavation (see Külla and Lõhmus 1999), the principle can also be coupled with a more recent detection[3] technique: tomography[8] (see Cui et al. 2013). In a human body analogy, the excavation-skeleton method would be like dissecting human bones, while the tomography-skeleton method resembles taking X-ray radiography. Both combinations and their differences will be discussed in Section 3. Generally, we define the skeleton method (sensu lato) as an individual-level identification method linking the roots to one another and to an aboveground plant, by following them and reconstructing the complete root system of plant individuals.
Identification based on phenotypic traits
At the species level, the simplest techniques rely on visually recognizing root morphological traits (i.e. anatomical phenotype) that support linking root observations to a species. Species identification guides based on root traits exist for specific regions (Cutler et al. 1987), and root morphology can be used as a species-level root identification method[4] (Rewald et al. 2012). Generally, the variability in root traits is less informative for plant identification in comparison with aboveground plant traits, such as the floral traits. However, to this day, many studies still rely on root-specific identifiable traits (Cope et al. 2012; Pagès and Kervella 2018). For instance, Watt et al. (2008) relied on fluorescence and cryo-scanning electron microscopic techniques to study the number and arrangement of xylem tracheary elements to successfully distinguish current and remnant roots and their distribution within triticale, barley, and wheat cropping systems. So far, it has not been suggested, as it seems rather unlikely, that root morphology could be used for individual-level identification.
Similarly, molecular traits (i.e. chemical phenotype) can be used to link sampled root fragments to a plant species. The chemical phenotype of a plant can provide tools for species-level identification of roots: species-specific endogenous biomolecules detectable in dry tissues or wax can be used as markers to identify roots species identity (Roumet et al. 2006). While largely unexplored, endogenous chemical markers have the potentical to be greatly informative at the species level.
Identification based on genotype
Molecular techniques can overcome some of the limitations associated with the taxonomic identification of roots from phenotypic traits, both at the species- and the genetic individual[10]-levels. The potential of DNA-based methods to identify plant parts in the soil was recognized as early as 20 years ago (Mommer et al. 2011a; Pärtel et al. 2012; Rewald et al. 2012 and references therein), and since then, their use has repeatedly proved useful in the study of belowground plant communities (e.g. Lamb et al. 2016; Träger et al. 2019).
Genetic methods for species-level identification
Early studies compared DNA sequences of the internal transcribed spacer (ITS) region obtained from individual root fragments with an ITS reference database constructed for the flora of the study area (Jackson et al. 1999; Linder et al. 2000), allowing the identification of belowground plant parts at the genus, and often, the species level. The later validation of specific DNA barcodes for plants, i.e. short genomic regions that are universally present in plant lineages (Kress et al. 2005; Kress and Erickson 2007; Taberlet et al. 2007; Hollingsworth et al. 2009), was aimed at improving the taxonomic resolution of molecular-based plant identifications. Chloroplast regions, mainly the matK, rbcL, trnH-psbA, and trnL markers, quickly became the universal primers of choice in most root barcoding studies, often in combination (e.g. Brunner et al. 2001; Ridgway et al. 2003; Frank et al. 2010; Jones et al. 2011; Kesanakurti et al. 2011).
In the abovementioned studies, species identification was performed on isolated roots. In other words, DNA was extracted from each root fragment, sequenced for the selected target region, and then matched against the reference database to assign it to a species in the regional pool. However, the rapid development of next-generation sequencing techniques and robust bioinformatic pipelines boosted the transition from barcoding single individuals to the metabarcoding of plant communities (Taberlet et al. 2012; Cristescu 2014; Deiner et al. 2017). In this approach, DNA from an unknown number of species is extracted from bulk (mixed roots) or environmental samples (eDNA) and later sequenced for a common region. The production of billions of sequence reads allows the simultaneous identification of multiple species in compound samples, exponentially increasing the speed and resolution of biodiversity assessments (Cristescu 2014). Over the last decade, DNA metabarcoding has been used to assess patterns of root diversity in species-rich communities across different vegetation types (Fisk et al. 2010; Taggart et al. 2011; Hiiesalu et al. 2012; Price et al. 2012; Lamb et al. 2016; Li et al. 2018; Träger et al. 2019). Furthermore, a recent study used mock communities of known species composition and biomass partition to successfully quantify the relative abundances of roots of different species in mixed samples (Matesanz et al. 2019). Interestingly, this opens the possibility that the use of post-sequencing correction methods may transform DNA metabarcoding from a purely qualitative identification method[4] to a quantitative approach.
An alternative method to the use of universal primers that amplify a common region across taxa is the use of species-specific primers in quantitative real time-PCR (qPCR). A remarkable benefit from the use of this technique is the fact that it renders quantitative (or semi-quantitative) abundance of each species in a mixed sample (Mommer et al. 2011b). However, the availability of primers for each of the plant species in a study area may constrain the implementation of this method in species-rich plant communities. Indeed, the use of qPCR to assess root identities and abundances has in general been limited to communities of two to six species (Fisk et al. 2010; Mommer et al. 2010; Riley et al. 2010; Haling et al. 2011; Zeng et al. 2015), although in a recent study, Herben et al. (2018) assessed the vertical distribution of roots of 13 species in a montane grassland.
Genetic methods for individual-level identification
A critical aspect of the usefulness of molecular methods to study root density[2] distribution is whether the identification of single individuals —not only species— is possible. In this context, several studies have used highly polymorphic microsatellite markers to link root fragments to specific individuals of different plant species (Brunner et al. 2001; Saari et al. 2005; Lang et al. 2010). In these works, individual multilocus genotypes are obtained from aerial tissue (typically leaves) and then matched to the genotyped root fragments. More recently, the analysis of single nucleotide polymorphisms (SNPs) using high-throughput sequencing has been shown to provide enough resolution for individual-level identification. SNPs are comparatively less informative than microsatellites at the marker level, but the number of SNPs is usually several orders of magnitude larger than available microsatellites. However, although the application of SNPs to identify single individuals is fairly common in animal populations (see e.g. von Thaden et al. 2020 and references therein), it is less so in plants (Niissalo et al. 2018) and, to our knowledge, it has not been used yet to link aboveground plants to specific roots. Nevertheless, due to their potential resolution for individual-level identification, the use of SNPs to discriminate root fragments and link them to their aerial counterparts may become much more common in the near future.
At the community level, a few recent studies have attempted to obtain intraspecific genetic diversity data from DNA metabarcoding data (see e.g. Pedro et al. 2017; Elbrecht et al. 2018; Turon et al. 2020). For instance, using hypervariable barcodes, Turon et al. (2020) inferred both inter- and intra-population genetic variability of several species from benthic littoral communities. Although this possibility has not yet been explored for land plants, and more specifically, roots, these studies open a promising avenue to potentially discriminate between individuals of the same species, and for multiple species simultaneously, by using metabarcoding data.
Identification based on artificial tracers
Plant injections
Exogenous artificial tracers, such as dyes or radioisotopes that can be incorporated in the aboveground tissues of living individual plants and then detected in roots, have been used as an individual-level identification method[4]. The use of radioisotopes became popular in the mid-twentieth century and was further developed in the following decades. Plant physiologists tested a wide variety of radioisotopes such as 14C, 134Cs, 131I, 32P or 86Rb, and several analytical techniques such as the measure of Geiger activity, scintillation, autoradiography, or gamma spectroscopy (Fraser and Mawson 1953; Bormann and Graham 1959; Racz et al. 1963; Litav and Harper 1967; Baldwin and Tinker 1972; Bookman and Mack 1982). However, on account of the potential risks to health and to the environment linked to this method, the field use of radioactive compounds soon lost popularity, and will not be discussed further in this review.
Dyes are cheap, visually recognizable tracers that can travel through the plant vessels to the roots, and generally do not diffuse to the soil, permitting the individual-level identification of root fragments. The use of plant injections has a long history –including injections of dyes starting in the twelfth century–, and dyes have been occasionally used as markers to link plant roots to individuals (Roach 1939). Despite existing modern science studies of water transfer between herbaceous plants and root graft in trees based on the use of dyes (eosin, acid fuchsine) as tracers (Bormann 1957; Bormann and Graham 1959; Graham 1960), the use of dyes to study roots has been overlooked, probably eclipsed by the development of fancier methods involving more modern technologies.
Recently, Murakami et al. (2006) revisited this possibility, incorporating the exertion of 0.5 bars of pressure to the dye in order to force its descent in plants grown in a greenhouse. They successfully stained in different colors the roots of different individuals of plant cultivars in pots after drying the substrate, allowing them to map the root density[2] of these plants. Even though this method has been replicated in pot-grown herbaceous plants (Miyazawa et al. 2010; Cabal et al. 2020b), and improved to work in larger containers kept outdoor (Murakami et al. 2011), it still has received very little attention to this day. It has been claimed that its ecological application to large plants in the field may not be feasible (Rewald et al. 2012), yet the roots of wild woody Mediterranean shrubs (up to 40 kg of aboveground dry weight) have been successfully stained in the field (Cabal et al., unpublished, see Fig. 2b), placing this as a promising method for root identification in the field.
Fluorescence in genetically modified plants
Finally, genetically modified plants can endogenously produce detectable substances such as fluorescent proteins that can be used in experimental set-ups to differentiate the roots of this group of genetically modified organisms from the roots of non-modified conspecifics (Faget et al. 2009). This method can be used to generate individual-level root maps when planting a single fluorescent individual surrounded by non-fluorescent conspecifics, or several plants marked using different, discernible fluorescent proteins. However, this method is not suited to study undisturbed natural systems, as it requires the engineering and artificial planting of these fluorescent individuals.
Detection-identification combined protocols
A complete protocol to study root systems must necessarily account for both root detection[3] and root identification methods[4]. Table 1 presents these potential DI methods[5]. Here we discuss these methods and assess which of them can potentially provide IRDD information.
The phenotypic identification of root fragments requires visualization of the roots in order to recognize species-specific traits. Root trait recognition is generally done by extraction (soil excavation, trenches, or soil samples[6]) (Pagès and Kervella 2018). Similarly, identification methods based on chemical substances, either genetic information or other chemical metabolites, do require bringing the root fragments to a laboratory for analysis. Therefore, phenotype- or DNA-based identification methods can be combined almost exclusively with extraction techniques. The combination of phenotype- or DNA-based identification methods with excavation-based detection can inform on root presence (excavation), relative abundance (trench walls), or root density (soil samples) of plant species or genetic individuals. For instance, the combination of DNA metabarcoding and soil coring can provide maps of the relative abundance of plant roots in two-dimensional horizontal root space (Fig. 3a). Furthermore, the combination of microsatellite or SNPs with soil sampling may be suitable to map the IRDD of plants when researchers target genetic individuals[10]. However, it is worth stressing that this type of genetic analysis requires performing separate tests for several hundreds of root fragments, and is therefore economically prohibitive currently.

Illustration of the raw sample (upper pannels) and processed data (bottom pannels) information from five selected DI methods. a- Raw samples are root mixtures obtained by regular soil coring of a field plot (photograph by C. Díaz). Processed data after DNA metabarcoding results in the spatially-explicit abundance of roots of each species using their DNA reads in the multispecies mixtures, map from A. Illuminati et al. (unpublished). By relating the proportion of reads of each species to the root biomass per sample, this method can provide species root densities. b- Raw sample obtained by scanning the surface of a minirhizhotron tube, distinguishing white roots and brown roots from two different species, photograph by F. M. Padilla and H. de Kroon. Processed data show root length by surface changing over time, plot adapted from Padilla et al. (2013). c- Raw sample of tomography obtained by scanning a soil transect using ground-penetrating radar; note distinct reflections that can be associated to the presence of roots, image adapted from Butnor et al. (2001). Processed data shows the full root system spatial structure and architecture, example image from TreeRadar UK (https://treeradaruk.com/). d- Raw sample of clean root fragments from a soil sample stained in different colors to identify the individual plant to which they belong, photograph by A. de Castro Aguilar. Processed data indicate the actual root density distribution of the roots of each individual in space, plot adapted from Cabal et al. (2020b). e- Raw sample is a wood core obtained from the tree trunk, from which water isotope composition is measured, photograph by H. P. T. De Deurwaerder. Processed data compare the water isotopic composition of the samples with the water isotopic composition across the vertical soil profile, informing on the weighed depth of root water uptake, plot adapted from De Deurwaerder et al. (2018). Although species’ means are shown, data from the method come from individual-level information. Symbols embedded in top panels as in the legend of Table 1
As an exception to the above, belowground imagery using rhizhotron systems can be used to assign root fragments to species in controlled conditions of few species with contrasting phenotypic traits. For instance, Padilla et al. (2013) identified at the species level the roots of two different species sharing a container, one with brown roots and the other with white roots (Fig. 3b). Yet the application of this method in the field may not be viable, as multiple species with undiscernible root traits usually coexist. Similarly, some other studies show the potential combination of minirhizotron[7] detection with the use of artificial tracers such as injecting dyes (Cahill et al. 2010) or using fluorescence (Faget et al. 2009) as individual-level identification methods. However, generally speaking, the use of minirhizotrons has several limitations when it comes to obtaining IRDD data, as discussed above.
The skeleton method can be used as an identification method to obtain a complete map of the roots of an individual (including IRDD[1] information), combined with either excavation or radar tomography. The use of excavation to implement the skeleton method presents, however, several logistic limitations. In the case of woody plants, this is potentially feasible but extremely time-consuming for the coarse, lignified roots. On the other hand, when roots get finer –hence copious and softer– tracing their location without breaking them or losing track of their spatial position becomes an almost impossible task. With the development of adapted radar systems able to detect roots in the soil, a non-intrusive skeleton method has become popular (Zenone et al. 2008b) (Fig. 3c). Even though in theory a complete 3D map of root systems can be obtained using tomography systems, current equipment fails to detect roots with small diameters or at greater depths, as discussed above, limiting the outcome of this combination. Nonetheless, this technology shows high potential for the future of IRDD sampling. Alternatively, acoustic tomography can be used with the same goal, with the added value that this is an individual-level detection method capable of confirming the individual plant to which each root is linked.
The identification methods involving the use of tracers generally need to be combined with extraction-based detection techniques. Combining of the use of tracers with excavation methods can inform about the root presence (excavation), relative abundance (trench walls or rhizotron), or root density (soil samples) of plants. Radioisotopes used as artificial tracers need to be detected in extracted samples where Geiger activity (Racz et al. 1963) or gamma spectroscopy (Bookman and Mack 1982) is measured, or in soil trenches analyzed using autoradiography (Baldwin and Tinker 1972). In the case of colorants distributed throughout the plant vessels by injection or fluorescent genetically modified organisms, visualizing the root is enough, therefore minirhizotron systems can also be used for root detection, as discussed above. One of the most successful approaches may result from the combination of dye injection with soil sampling. This DI method has been used to map the IRDD of physiological plant individuals[9] both in controlled conditions (Cabal et al. 2020b) (Fig. 3d) and in the field (see Fig. 2).
Some detection methods do not need to be combined with any particular identification method (last row in Table 1), namely water isotopes, electric capacitance, electric impedance tomography[8], and acoustic tomography. These are root detection methods that detect the presence of roots in the substrate by transmitting a signal that travels through physiological individuals (being emitted or detected in the individual body). Therefore, these methods are by nature DI methods, as the roots are both detected and linked to the studied physiological individual in a single step. Nonetheless, most of these are inference detection methods, and hence provide surrogate information about the roots, not accurate information about the actual root density[2]. As an example, water isotope methods can be used to infer root activity in the vertical soil profile (Fig. 3e). In conclusion, these DI methods are generally not a good alternative to obtain IRDD maps, with the exception of acoustic tomography, as discussed above.
Future directions
In support of ecological root theory validation, which is becoming more complex and specific, the availability of more comprehensive data seems inextricable. This imposes a challenge to a scientific branch notably limited by its methodologies. We anticipate that methods targeting qualitative IRDD[1] data show the highest potential to meet these new data requirements, furthering our understanding of plant roots.
While all presented detection[3] and identification[4] methodologies provide important insights in root ecology, either by allowing the investigation of root anatomy or root function, most of them (alone or in combination) are currently unsuccessful in acquiring in situ and high-quality root density distribution data, i.e. IRDD maps. This is especially true when IRDD data for natural, and therefore more complex, systems are pursued. As scientists aspire to more complex root databases, methods that receive great attention today (i.e., minirhizotron[7] systems, DNA metabarcoding and qPCR, or water isotopes) but which are projected to reach a growth ceiling in acquirable IRDD data detail and applicability, might tend to lose popularity.
Coring to obtain soil samples[6] is probably the most advisable detection method currently available to obtain IRDD data. Specifically, the use of visible tracers in conjuncture with coring detection strategies can be advocated as the most straightforward and widely applicable DI method[5] available. Indeed, the use of visible in situ tracers pumped through a plants’ transport tissues was recently proved an affordable and effective identification method, supporting accurate and fast individual-level identification of root fragments in soil samples. While this combination of visible dyeing and coring might embody the most achievable DI tool at hand, pursuing further refinement and lowering costs of microsatellite and SNPs analyses remains a high priority, as it has the potential to represent a very effective way to identify root fragments at a genetic-individual[10] level. These specific DNA techniques might very likely become more common in the future as they overcome the intrusive nature of applying visible dye to plants, which requires cutting the aboveground part of the plants and hence killing them, rather than only extracting some root fragments in cores while allowing the plant to recover and survive.
Additionally, we anticipate that when the resolution and precision of GPR and acoustic tomography[8] systems for root detection improve, these methods may become flagship techniques to obtain IRDD[1] data in combination with the skeleton method, especially for bigger plants with lignified roots. The application of these methods for detecting fine roots of herbaceous plants is questionable. One fundamental advantage of the skeleton method over the abovementioned DI methods is that, besides providing IRDD information, the skeletonization of complete root systems also allows to analyze more detailed data on root architecture (i.e. root direction and branching patterns) encapsulating the most comprehensive set of root information one can imagine. However, as compared to soil sampling, it has the disadvantage of not providing a direct measure of root biomass, but only a root volume that can be used as a proxy of root mass. Anticipating further refinement of the technique, tomography based in either electromagnetic or acoustic waves emerges as perhaps the most promising and convenient non-intrusive detection method with high potential to acquire high-quality IRDD data under a variety of field conditions.
References
Addo-Danso SD, Prescott CE, Smith AR (2016) Methods for estimating root biomass and production in forest and woodland ecosystem carbon studies: a review. For Ecol Manag 359:332–351. https://doi.org/10.1016/j.foreco.2015.08.015
Al Hagrey SA (2007) Geophysical imaging of root-zone, trunk, and moisture heterogeneity. J Exp Bot 58:839–854. https://doi.org/10.1093/jxb/erl237
Alani AM, Lantini L (2019) Recent advances in tree root mapping and assessment using non-destructive testing methods: a focus on ground penetrating radar. Surv Geophys 41:605–646. https://doi.org/10.1007/s10712-019-09548-6
Amato M, Bitella G, Rossi R, Gómez JA, Lovelli S, Gomes JJF (2009) Multi-electrode 3D resistivity imaging of alfalfa root zone. Eur J Agron 31:213–222. https://doi.org/10.1016/j.eja.2009.08.005
Amato M, Rossi R, Bitella G, Lovelli S (2010) Multielectrode geoelectrical tomography for the quantification of plant roots. Ital J Agron 5:257–263. https://doi.org/10.4081/ija.2010.257
Arnaud M, Baird AJ, Morris PJ, Harris A, Huck JJ (2019) EnRoot: a narrow-diameter, inexpensive and partially 3D-printable minirhizotron for imaging fine root production. Plant Methods 15:1–9. https://doi.org/10.1186/s13007-019-0489-6
Aubrecht L, Staněk Z, Koller J (2006) Electrical measurement of the absorption surfaces of tree roots by the earth impedance method: 1. Theory. Tree Physiol 26:1105–1112. https://doi.org/10.1093/treephys/26.9.1105
Aulen M, Shipley B (2012) Non-destructive estimation of root mass using electrical capacitance on ten herbaceous species. Plant soil 355:41–49. https://doi.org/10.1007/2Fs11104-011-1077-3
Baldwin JP, Tinker PB (1972) A method for estimating the lengths and spatial patterns of two interpenetrating root systems. Plant Soil 37:209–213. https://doi.org/10.1007/BF01578497
Bar-Cohen Y, Zacny K (2009) Drilling in extreme environments: penetration and sampling on earth and other planets. Wiley-VCH Verlag GmbH & Co. KGaA
Barbeta A, Gimeno TE, Clavé L, Fréjaville B, Jones SP, Delvigne C, Wingate L, Ogée J (2020) An explanation for the isotopic offset between soil and stem water in a temperate tree species. New Phytol 227:766–779. https://doi.org/10.1111/nph.16564
Barbeta A, Jones SP, Clavé L, Wingate L, Gimeno TE, Fréjaville B, Wohl S, Ogée J (2019) Unexplained hydrogen isotope offsets complicate the identification and quantification of tree water sources in a riparian forest. Hydrol Earth Syst Sci 23:2129–2146. https://doi.org/10.5194/hess-23-2129-2019
Bardgett RD, Mommer L, De Vries FT (2014) Going underground: root traits as drivers of ecosystem processes. Trends Ecol Evol 29:692–699. https://doi.org/10.1016/j.tree.2014.10.006
Barrett SCH (2015) Influences of clonality on plant sexual reproduction. Proc Natl Acad Sci U S A 112:8859–8866. https://doi.org/10.1073/pnas.1501712112
Bassuk N, Grabosky J, Mucciardi A, Raffel G (2011) Ground-penetrating radar accurately locates tree roots in two soil media under pavement. Arboric Urban For 37:160–166
Bizet F, Bengough AG, Hummel I, Bogeat-Triboulot MB, Dupuy LX (2016) 3D deformation field in growing plant roots reveals both mechanical and biological responses to axial mechanical forces. J Exp Bot 67:5605–5614. https://doi.org/10.1093/jxb/erw320
Böhm W (1979a) Auger methods. In: Methods of studying root systems. Springer-Verlag, Berlin - Heidelberg, pp. 39–47
Böhm W (1979b) Excavation methods. In: Methods of studying root systems. Springer-Verlag, Berlin - Heidelberg, pp. 5–19
Böhm W (1979c) Profile wall methods. In: Methods of studying root systems. Springer-Verlag, Berlin - Heidelberg, pp. 48–60
Böhm W (1979d) Monolit method. In: Methods of studying root systems. Springer-Verlag, Berlin - Heidelberg, pp. 20–38
Bookman PA, Mack RN (1982) Root interaction between Bromus Tectorum and Poa Pratensis : a three-dimensional analysis. Ecology 63:640–646. https://doi.org/10.2307/1936783
Bormann FH (1957) Moisture transfer between plants through intertwined root systems. Plant Physiol 32:48–55. https://doi.org/10.1104/pp.32.1.48
Bormann FH, Graham BF (1959) The Occurrence of Natural Root Grafting in Eastern White Pine , Pinus strobus L ., and Its Ecological Implications. Ecology 40:677–691. https://doi.org/10.2307/1929820
Brunner I, Brodbeck S, Büchler U, Sperisen C (2001) Molecular identification of fine roots of trees from the Alps: reliable and fast DNA extraction and PCR-RFLP analyses of plastid DNA. Mol Ecol 10:2079–2087. https://doi.org/10.1046/j.1365-294X.2001.01325.x
Bucur V (2006) Acoustics of wood. Springer Science & Business Media
Butnor JR, Barton C, Day F et al (2012) Using ground-penetrating radar to detect tree roots and estimate biomass. In: Mancuso S (ed) Measuring roots: an updated approach. Springer, Heidelberg, New York, pp 1–382
Butnor JR, Doolittle JA, Johnsen KH, Samuelson L, Stokes T, Kress L (2003) Utility of ground-penetrating radar as a root biomass survey tool in forest systems. Soil Sci Soc Am J 67:1607–1615
Butnor JR, Doolittle JA, Kress L, Cohen S, Johnsen KH (2001) Use of ground-penetrating radar to study tree roots in the southeastern United States. Tree Physiol 21:1269–1278
Butnor JR, Samuelson LJ, Stokes TA, Johnsen KH, Anderson PH, González-Benecke CA (2016) Surface-based GPR underestimates below-stump root biomass. Plant Soil 402:47–62. https://doi.org/10.1007/s11104-015-2768-y
Buza ÁK, Divós F (2016) Root stability evaluation with non-destructive techniques. Acta Silv Lignaria Hungarica 12:125–134
Cabal C, Martínez-García R, Valladares F (2020a) The ecology of plant interactions: a giant with feet of clay. Preprint. https://doi.org/10.20944/preprints202009.0520.v1
Cabal C, Martínez-García R, De Castro A, et al (2020b) The exploitative segregation of plant roots. Science (80- ) 370:1197–1199. https://doi.org/10.1126/science.aba9877
Cahill JF, McNickle GG, Haag JJ, et al (2010) Plants integrate information about nutrients and neighbors. Science (80- ) 328:1657. https://doi.org/10.1126/science.1189736
Cao Y, Repo T, Silvennoinen R, Lehto T, Pelkonen P (2011) Analysis of the willow root system by electrical impedance spectroscopy. J Exp Bot 62:351–358
Čermák J, Ulrich R, Staněk Z et al (2006) Electrical measurement of tree root absorbing surfaces by the earth impedance method: 2. Verification based on allometric relationships and root severing experiments. Tree Physiol 26:1113–1121. https://doi.org/10.1093/treephys/26.9.1113
Chloupek O (1972) The relationship between electric capacitance and some other parameters of plant roots. Biol Plant 14:227–230
Chloupek O (1977) Evaluation of the size of a plant’s root system using its electrical capacitance. Plant Soil 48:525–532
Cope JS, Corney D, Clark JY, Remagnino P, Wilkin P (2012) Plant species identification using digital morphometrics: a review. Expert Syst Appl 39:7562–7573. https://doi.org/10.1016/j.eswa.2012.01.073
Corona-Lopez DDJ, Sommer S, Rolfe SA, Podd F, Grieve BD (2019) Electrical impedance tomography as a tool for phenotyping plant roots. Plant Methods 15:49
Cristescu ME (2014) From barcoding single individuals to metabarcoding biological communities: towards an integrative approach to the study of global biodiversity. Trends Ecol Evol 29:566–571. https://doi.org/10.1016/j.tree.2014.08.001
Cseresnyés I, Rajkai K, Takács T, Vozáry E (2018a) Electrical impedance phase angle as an indicator of plant root stress. Biosyst Eng 169:226–232. https://doi.org/10.1016/j.biosystemseng.2018.03.004
Cseresnyés I, Szitár K, Rajkai K, Füzy A, Mikó P, Kovács R, Takács T (2018b) Application of electrical capacitance method for prediction of plant root mass and activity in field-grown crops. Front Plant Sci 9:1–11. https://doi.org/10.3389/fpls.2018.00093
Cui X, Guo L, Chen J, Chen X, Zhu X (2013) Estimating tree-root biomass in different depths using ground-penetrating radar: evidence from a controlled experiment. IEEE Trans Geosci Remote Sens 51:3410–3423. https://doi.org/10.1109/TGRS.2012.2224351
Cutler DF, Rudall PJ, Gasson PE, Gale RMO (1987) Root identification manual of trees and shrubs. A guide to the anatomy of roots of trees and shrubs hardy in Britain and northern Europe. Chapman and Hall, London
Dansgaard W (1964) Stable isotopes in precipitation. Tellus 16:436–468
Dalton EN (1995) In-situ root extent measurements by electrical capacitance methods. Plant and Soil 173:157–165. https://doi.org/10.1007/BF00155527
De Deurwaerder H, Hervé-Fernández P, Stahl C et al (2018) Liana and tree below-ground water competition—evidence for water resource partitioning during the dry season. Tree Physiol 38:1071–1083. https://doi.org/10.1093/treephys/tpy002
De Deurwaerder H, Visser MD, Detto M et al (2020) Causes and consequences of pronounced variation in the isotope composition of plant xylem water. Biogeosciences 17:4853–4870
Deiner K, Bik HM, Mächler E, Seymour M, Lacoursière-Roussel A, Altermatt F, Creer S, Bista I, Lodge DM, Vere N, Pfrender ME, Bernatchez L (2017) Environmental DNA metabarcoding: transforming how we survey animal and plant communities. Mol Ecol 26:5872–5895. https://doi.org/10.1111/mec.14350
Dietrich RC, Bengough AG, Jones HG, White PJ (2013) Can root electrical capacitance be used to predict root mass in soil? Ann Bot 112:457–464. https://doi.org/10.1093/aob/mct044
Dietrich RC, Bengough AG, Jones HG, White PJ (2012) A new physical interpretation of plant root capacitance. J Exp Bot 63:6149–6159
Divos F, Szalai L (2002) Tree evaluation by acoustic tomography. In: proceedings of the 13th international symposium on nondestructive testing of wood. Forest Products Research Society, Madison, WI, p 21
Ehleringer JR, Dawson TE (1992) Water uptake by plants: perspectives from stable isotope composition. Plant Cell Environ 15:1073–1082. https://doi.org/10.1111/j.1365-3040.1992.tb01657.x
Elbrecht V, Vamos EE, Steinke D, Leese F (2018) Estimating intraspecific genetic diversity from community DNA metabarcoding data. PeerJ 2018:1–13. https://doi.org/10.7717/peerj.4644
Ellis TW, Murray W, Paul K, Kavalieris L, Brophy J, Williams C, Maass M (2013) Electrical capacitance as a rapid and non-invasive indicator of root length. Tree Physiol 33:3–17
Eloy C, Fournier M, Lacointe A, Moulia B (2017) Wind loads and competition for light sculpt trees into self-similar structures. Nat Commun 8:1–12. https://doi.org/10.1038/s41467-017-00995-6
Enquist BJ, Niklas KJ (2002) Global allocation rules for patterns of biomass partitioning in seed plants. Science (80- ) 295:1517–1520. https://doi.org/10.1126/science.1066360
Faget M, Herrera JM, Stamp P, Aulinger-Leipner I, Frossard E, Liedgens M (2009) The use of green fluorescent protein as a tool to identify roots in mixed plant stands. Funct Plant Biol 36:930–937. https://doi.org/10.1071/FP09125
Falik O, de Kroon H, Novoplansky A (2006) Physiologically-mediated self/nonself root discrimination in Trifolium repens has mixed effects on plant performance. Plant Signal Behav 1:116–121. https://doi.org/10.4161/psb.1.3.2639
Fisk MC, Yanai RD, Fierer N (2010) A molecular approach to quantify root community composition in a northern hardwood forest - testing effects of root species, relative abundance, and diameter. Can J For Res 40:836–841. https://doi.org/10.1139/X10-022
Frank DA, Pontes AW, Maine EM, Caruana J, Raina R, Raina S, Fridley JD (2010) Grassland root communities: species distributions and how they are linked to aboveground abundance. Ecology. 91:3201–3209. https://doi.org/10.1890/09-1831.1
Fraser DA, Mawson CA (1953) Movement of radioactive isotopes in yellow birch and White pine as detected with a portable scintillation counter. Can J Bot 31:324–333. https://doi.org/10.1139/b53-026
Fricke K (1904) Shade intolerant and shade-tolerant species das, a dogma that is not founded in science. Cent für gesamte Forstwes 30:315–325
Gat J (2010) Isotope hydrology: a study of the water cycle. World scientific
Graham BF (1960) Transfer of dye through natural root grafts of Pinus Strobus L. Ecology 41:56–64. https://doi.org/10.2307/1931939
Guo L, Chen J, Cui X, Fan B, Lin H (2013) Application of ground penetrating radar for coarse root detection and quantification: a review. Plant Soil 362:1–23. https://doi.org/10.1007/s11104-012-1455-5
Hales S (1727) Vegetal Statistiks. W & J Innys, London
Haling RE, Simpson RJ, McKay AC et al (2011) Direct measurement of roots in soil for single and mixed species using a quantitative DNA-based method. Plant Soil 348:123–137. https://doi.org/10.1007/s11104-011-0846-3
Harper JL (1977) The population biology of plants. The Blackburn Press, Caldwell
Herben T, Vozábová T, Hadincová V, Krahulec F, Mayerová H, Pecháčková S, Skálová H, Krak K (2018) Vertical root distribution of individual species in a mountain grassland community: does it respond to neighbours? J Ecol 106:1083–1095. https://doi.org/10.1111/1365-2745.12830
Hiiesalu I, Öpik M, Metsis M et al (2012) Plant species richness belowground: higher richness and new patterns revealed by next-generation sequencing. Mol Ecol 21:2004–2016. https://doi.org/10.1111/j.1365-294X.2011.05390.x
Hirano Y, Dannoura M, Aono K, Igarashi T, Ishii M, Yamase K, Makita N, Kanazawa Y (2009) Limiting factors in the detection of tree roots using ground-penetrating radar. Plant Soil 319:15–24. https://doi.org/10.1007/s11104-008-9845-4
Hollingsworth PM, Forrest LL, Spouge JL et al (2009) A DNA barcode for land plants. Proc Natl Acad Sci U S A 106:12794–12797. https://doi.org/10.1073/pnas.0905845106
Hruska J, Cermák J, Sustek S (1999) Mapping tree root systems with ground-penetrating radar. Tree Physiol 19:125–130. https://doi.org/10.1093/treephys/19.2.125
Jackson RB, Moore LA, Hoffmann WA, Pockman WT, Linder CR (1999) Ecosystem rooting depth determined with caves and DNA. Proc Natl Acad Sci U S A 96:11387–11392. https://doi.org/10.1073/pnas.96.20.11387
Jones FA, Erickson DL, Bernal MA, Bermingham E, Kress WJ, Herre EA, Muller-Landau HC, Turner BL (2011) The roots of diversity: below ground species richness and rooting distributions in a tropical forest revealed by DNA barcodes and inverse modeling. PLoS One 6:e24506. https://doi.org/10.1371/journal.pone.0024506
Kesanakurti PR, Fazekas AJ, Burgess KS et al (2011) Spatial patterns of plant diversity below-ground as revealed by DNA barcoding. Mol Ecol 20:1289–1302. https://doi.org/10.1111/j.1365-294X.2010.04989.x
Klepper B, Kaspar TC (1994) Rhizotrons: their development and use in agricultural research. Agron J 86:745–795. https://doi.org/10.2134/agronj1994.00021962008600050002x
Knight TA (1811) On the causes which influence the direction of the growth of roots. Philos Trans 101:209–219. https://doi.org/10.1098/rstl.1811.0013
Kress WJ, Erickson DL (2007) A two-locus global DNA barcode for land plants: the coding rbcL gene complements the non-coding trnH-psbA spacer region. PLoS One 2:e508. https://doi.org/10.1371/journal.pone.0000508
Kress WJ, Wurdack KJ, Zimmer EA, Weigt LA, Janzen DH (2005) Use of DNA barcodes to identify flowering plants. Proc Natl Acad Sci U S A 102:8369–8374. https://doi.org/10.1073/pnas.0503123102
Külla T, Lõhmus K (1999) Influence of cultivation method on root grafting in Norway spruce (Picea abies (L.) karst.). Plant Soil 217:91–100. https://doi.org/10.1007/978-94-017-3469-1_10
Lamb EG, Winsley T, Piper CL, Freidrich SA, Siciliano SD (2016) A high-throughput belowground plant diversity assay using next-generation sequencing of the trnL intron. Plant Soil 404:361–372. https://doi.org/10.1007/s11104-016-2852-y
Lang C, Dolynska A, Finkeldey R, Polle A (2010) Are beech (Fagus sylvatica) roots territorial? For Ecol Manag 260:1212–1217. https://doi.org/10.1016/j.foreco.2010.07.014
Li Z, Lamb EG, Piper CL, Siciliano SD (2018) Plant belowground diversity and species segregation by depth in a semi-arid grassland. Ecoscience 25:1–7. https://doi.org/10.1080/11956860.2017.1403242
Liao A, Zhou Q, Zhang Y (2015) Application of 3D electrical capacitance tomography in probing anomalous blocks in water. J Appl Geophys 117:91–103. https://doi.org/10.1016/j.jappgeo.2015.03.030
Linder CR, Moore LA, Jackson RB (2000) A universal molecular method for identifying underground plant parts to species. Mol Ecol 9:1549–1559. https://doi.org/10.1046/j.1365-294X.2000.01034.x
Litav M, Harper JL (1967) A method for studying spatial relationships between the root systems of two Neighbouring plants. Plant Soil 26:389–392. https://doi.org/10.1007/BF01880190
Lux A, Rost TL (2012) Plant root research: the past, the present and the future. Ann Bot 110:201–204. https://doi.org/10.1093/aob/mcs156
Lyklema J (2005) Fundamentals of interface and colloid science: soft colloids. Elsevier
Maeght JL, Rewald B, Pierret A (2013) How to study deep roots-and why it matters. Front Plant Sci 4:1–14. https://doi.org/10.3389/fpls.2013.00299
Magh R-K, Eiferle C, Burzlaff T, et al (2020) Competition for water rather than facilitation in mixed beech-fir forests after drying-wetting cycle J Hydrol 124944
Mancuso S (ed) (2012) Measuring roots. An Updated Approach. Springer-Verlag, Dordrecht London New York
Marshall JD, Cuntz M, Beyer M, Dubbert M, Kuehnhammer K (2020) Borehole equilibration: testing a new method to monitor the isotopic composition of tree xylem water in situ. Front Plant Sci 11:358
Mary B, Peruzzo L, Boaga J, Schmutz M, Wu Y, Hubbard SS, Cassiani G (2018) Small-scale characterization of vine plant root water uptake via 3-D electrical resistivity tomography and mise-à-la-masse method. Hydrol Earth Syst Sci 22:5427–5444
Mary B, Saracco G, Peyras L, Vennetier M, Mériaux P, Baden D (2015) Preliminary use of ultrasonic tomography measurement to map tree roots growing in earth dikes. Phys Procedia 70:965–969
Maschhaupt JG (1915) De beworteling onzer cultuurgewassen. Versl Landbouwk Onderz 16:76–89
Matesanz S, Pescador DS, Pías B, Sánchez AM, Chacón-Labella J, Illuminati A, Cruz M, López-Angulo J, Marí-Mena N, Vizcaíno A, Escudero A (2019) Estimating belowground plant abundance with DNA metabarcoding. Mol Ecol Resour 19:1265–1277. https://doi.org/10.1111/1755-0998.13049
Miyazawa K, Murakami T, Takeda M, Murayama T (2010) Intercropping green manure crops-effects on rooting patterns. Plant Soil 331:231–239. https://doi.org/10.1007/s11104-009-0248-y
Mommer L, Dumbrell AJ, Wagemaker CAM, Ouborg NJ (2011a) Belowground DNA-based techniques: untangling the network of plant root interactions. Plant Soil 348:115–121. https://doi.org/10.1007/s11104-011-0962-0
Mommer L, Dumbrell AJ, Wagemaker CAM, Ouborg NJ (2011b) Belowground DNA-based techniques: untangling the network of plant root interactions. Plant Soil 348:115–121. https://doi.org/10.1007/s11104-011-0962-0
Mommer L, van Ruijven J, de Caluwe H, Smit-Tiekstra AE, Wagemaker CAM, Joop Ouborg N, Bögemann GM, van der Weerden GM, Berendse F, de Kroon H (2010) Unveiling below-ground species abundance in a biodiversity experiment: a test of vertical niche differentiation among grassland species. J Ecol 98:1117–1127. https://doi.org/10.1111/j.1365-2745.2010.01702.x
Murakami T, Shimano S, Kaneda S, Nakajima M, Urashima Y, Miyoshi N (2006) Multicolor staining of root systems in pot culture. Soil Sci Plant Nutr 52:618–622. https://doi.org/10.1111/j.1747-0765.2006.00078.x
Murakami T, Shimano S, Kaneda S, Nakajima M, Urashima Y, Miyoshi N (2011) Improvement of root staining method for field applications. Soil Sci Plant Nutr 57:541–548. https://doi.org/10.1080/00380768.2011.590945
Nadezhdina N, Čermák J (2003) Instrumental methods for studies of structure and function of root systems of large trees. J Exp Bot 54:1511–1521. https://doi.org/10.1093/jxb/erg154
Nelson WW, Allmaras RR (1969) An improved monolith method for excavating and describing roots. Agron J 61:751–754. https://doi.org/10.2134/agronj1969.00021962006100050030x
Niissalo MA, Leong-Škornicková J, Webb EL, Khew GS (2018) Pedigree analyses and next-generation sequencing reveal critically low regeneration in extremely threatened Zingiber singapurense (Zingiberaceae). Bot J Linn Soc 187:346–361. https://doi.org/10.1093/botlinnean/boy018
O’Brien EE, Gersani M, Brown JS (2005) Root proliferation and seed yield in response to spatial heterogeneity of below-ground competition. New Phytol 168:401–412. https://doi.org/10.1111/j.1469-8137.2005.01520.x
Ogle K, Wolpert RL, Reynolds JF (2004) Reconstructing plant root area and water uptake profiles. Ecology 85:1967–1978
Ozier-Lafontaine H, Bajazet T (2005) Analysis of root growth by impedance spectroscopy (EIS). Plant Soil 277:299–313
Padilla FM, Mommer L, de Caluwe H, Smit-Tiekstra AE, Wagemaker CAM, Ouborg NJ, de Kroon H (2013) Early root overproduction not triggered by nutrients decisive for competitive success belowground. PLoS One 8:1–9. https://doi.org/10.1371/journal.pone.0055805
Pagès L, Kervella J (2018) Seeking stable traits to characterize the root system architecture. Study on 60 species located at two sites in natura. Ann Bot 122:107–115. https://doi.org/10.1093/aob/mcy061
Pärtel M, Hiiesalu I, Öpik M, Wilson SD (2012) Below-ground plant species richness: new insights from DNA-based methods. Funct Ecol 26:775–782. https://doi.org/10.1111/j.1365-2435.2012.02004.x
Pearcy RW, Muraoka H, Valladares F (2005) Crown architecture in sun and shade environments: assessing function and trade-offs with a three-dimensional simulation model. New Phytol 166:791–800. https://doi.org/10.1111/j.1469-8137.2005.01328.x
Pedro PM, Piper R, Bazilli Neto P, Cullen L Jr, Dropa M, Lorencao R, Matté MH, Rech TC, Rufato MO Jr, Silva M, Turati DT (2017) Metabarcoding analyses enable differentiation of both interspecific assemblages and intraspecific divergence in habitats with differing management practices. Environ Entomol 46:1381–1389. https://doi.org/10.1093/ee/nvx166
Penna D, Hopp L, Scandellari F, Allen ST, Benettin P, Beyer M, Geris J, Klaus J, Marshall JD, Schwendenmann L, Volkmann THM, von Freyberg J, Amin A, Ceperley N, Engel M, Frentress J, Giambastiani Y, McDonnell JJ, Zuecco G, Llorens P, Siegwolf RTW, Dawson TE, Kirchner JW (2018) Ideas and perspectives: tracing terrestrial ecosystem water fluxes using hydrogen and oxygen stable isotopes–challenges and opportunities from an interdisciplinary perspective. Biogeosciences 15:6399–6415
Pennazio S (2014) Elements of plant physiology in Theophrastus’ botany. Theor Biol Forum 12:97–108. https://doi.org/10.1400/230157
Poca M, Coomans O, Urcelay C, et al (2019) Isotope fractionation during root water uptake by Acacia caven is enhanced by arbuscular mycorrhizas. Plant soil 1–13
Postic F, Doussan C (2016) Benchmarking electrical methods for rapid estimation of root biomass. Plant Methods 12:1–11. https://doi.org/10.1186/S13007-016-0133-7
Preston GM, McBride RA, Bryan J, Candido M (2004) Estimating root mass in young hybrid poplar trees using the electrical capacitance method. Agrofor Syst 60:305–309
Price JN, Hiiesalu I, Gerhold P, Pärtel M (2012) Small-scale grassland assembly patterns differ above and below the soil surface. Ecology. 93:1290–1296. https://doi.org/10.1890/11-1942.1
Proto AR, Di Iorio A, Abenavoli LM, Sorgonà A (2020) A sonic root detector for revealing tree coarse root distribution. Sci Rep 10:1–11. https://doi.org/10.1038/s41598-020-65047-4
Racz GJ, Rennie DA, Hutcheon WL (1963) The P32 injection method for studying the root systems of wheat. Can J Soil Sci 44:100–108. https://doi.org/10.4141/cjss64-013
Rewald B, Ephrath JE (2013) Minirhizotron techniques. In: Eshel a, Beeckman T (eds) plant roots: the hidden half, 4th edn. CRC press, Taylor & Francis group, Boca ratón, pp 735–750
Rewald B, Meinen C, Trockenbrodt M, Ephrath JE, Rachmilevitch S (2012) Root taxa identification in plant mixtures - current techniques and future challenges. Plant Soil 359:165–182. https://doi.org/10.1007/s11104-012-1164-0
Ridgway KP, Duck JM, Peter W, Young J (2003) Identification of roots from grass swards using PCR-RFLP and FFLP of the plastid trnL (UAA) intron. BMC Ecol 3:8. https://doi.org/10.1186/1472-6785-3-8
Riley IT, Wiebkin S, Hartley D, McKay AC (2010) Quantification of roots and seeds in soil with real-time PCR. Plant Soil 331:151–163. https://doi.org/10.1007/s11104-009-0241-5
Rizzo DM, Gross R (2000) Distribution of Armillaria on pear root systems and a comparison of root excavation techniques. In: Stokes A (ed) The supporting roots of trees and Woody plants: form, function and physiology. Springer, Dordrecht
Roach WA (1939) Plant injection as a physiological method. Ann Bot 3:155–226. https://doi.org/10.1093/oxfordjournals.aob.a085050
Rodríguez-Robles U, Arredondo T, Huber-Sannwald E, Ramos-Leal JA, Yépez EA (2017) Technical note: application of geophysical tools for tree root studies in forest ecosystems in complex soils. Biogeosciences 14:5343–5357. https://doi.org/10.5194/bg-14-5343-2017
Roumet C, Picon-cochard C, Dawson LA et al (2006) Quantifying species composition in root mixtures using two methods : near-infrared reflectance spectroscopy and plant wax markers. New Phytol 170:631–638. https://doi.org/10.1111/j.1469-8137.2006.01698.x
Saari SK, Campbell CD, Russell J, Alexander IJ, Anderson IC (2005) Pine microsatellite markers allow roots and ectomycorrhizas to be linked to individual trees. New Phytol 165:295–304. https://doi.org/10.1111/j.1469-8137.2004.01213.x
Samouëlian A, Cousin I, Tabbagh A, Bruand A, Richard G (2005) Electrical resistivity survey in soil science: a review. Soil Tillage Res 83:173–193
Sekiya N, Shiotsu F , Abe J, Morita S (2013) Distribution and quantity of root systems of field-grown erianthus and napier grass. Am J Plant Sci 4:16–22. https://doi.org/10.4236/ajps.2013.412A1003
Schenk HJ, Callaway RM, Mahall BE (1999) Spatial root segregation: are plants territorial? Adv Ecol Res 28:145–180. https://doi.org/10.1016/S0065-2504(08)60032-X
Schenk HJ, Jackson RB (2002) Rooting depths, lateral root spreads and below-ground/ above-ground allometries of plants in water-limited ecosystems. J Ecol 90:480–494. https://doi.org/10.1046/j.1365-2745.2002.00682.x
Schuurman JJ, Goedewaagen MAJ (1971) Methods for the examination of root systems and roots, 2nd edn. Center for Agricultural Publishing and Documentation, Wageningen
Semchenko M, Hutchings MJ, John EA (2007) Challenging the tragedy of the commons in root competition: confounding effects of neighbour presence and substrate volume. J Ecol 95:252–260. https://doi.org/10.1111/j.1365-2745.2007.01210.x
Smit AL, Bengough AG, Engels C, et al (eds) (2000) Root methods. A handbook. Springer-Verlag, Berlin Heidelberg
Sprenger M, Leistert H, Gimbel K, Weiler M (2016) Illuminating hydrological processes at the soil-vegetation-atmosphere interface with water stable isotopes. Rev Geophys 54:674–704
Stahl C, Herault B, Rossi V et al (2013) Depth of soil water uptake by tropical rainforest trees during dry periods: does tree dimension matter? Oecologia 173:1191–1201. https://doi.org/10.1007/s00442-013-2724-6
Staněk Z (1997) Physical aspects of resistivity measurements in plants from viewpoint of their ecological applications. Habilit Work Dep Physics, Tech Univ Prague, Czech Repub
Stoeckeler JH, Kluender WA (1938) The hydraulic method of excavating the root. Systems of Plants 19:355–369. https://doi.org/10.2307/1930591
Taberlet P, Coissac E, Pompanon F, Gielly L, Miquel C, Valentini A, Vermat T, Corthier G, Brochmann C, Willerslev E (2007) Power and limitations of the chloroplast trnL (UAA) intron for plant DNA barcoding. Nucleic Acids Res 35:e14. https://doi.org/10.1093/nar/gkl938
Taberlet P, Coissac E, Pompanon F et al (2012) Towards next-generation biodiversity assessment using DNA metabarcoding. Mol Ecol 21:2045–2050. https://doi.org/10.1111/j.1365-294X.2012.05470.x
Taggart JM, Cahill JF, Mcnickle GG, Hall JC (2011) Molecular identification of roots from a grassland community using size differences in fluorescently labelled PCR amplicons of three cpDNA regions. Mol Ecol Resour 11:185–195. https://doi.org/10.1111/j.1755-0998.2010.02893.x
Tarnocai C (1993) Sampling frozen soils. In: Carter MR (ed) Soil Sampling and Methods of Analysis. Lewis Publisher (CRC Press), New York, US, pp. 755–766
Taylor BN, Beidler KV, Cooper ER, Strand AE, Pritchard SG (2013) Sampling volume in root studies: the pitfalls of under-sampling exposed using accumulation curves. Ecol Lett 16:862–869. https://doi.org/10.1111/ele.12119
Träger S, Öpik M, Vasar M, Wilson SD (2019) Belowground plant parts are crucial for comprehensively estimating total plant richness in herbaceous and woody habitats. Ecology 100:1–12. https://doi.org/10.1002/ecy.2575
Turon X, Antich A, Palacín C, Præbel K, Wangensteen OS (2020) From metabarcoding to metaphylogeography: separating the wheat from the chaff. Ecol Appl 30:1–19. https://doi.org/10.1002/eap.2036
van Beem J, Smith ME, Zobel RW (1998) Estimating root mass in maize using a portable capacitance meter. Agron J 90:566–570
Volkmann THM, Haberer K, Gessler A, Weiler M (2016) High-resolution isotope measurements resolve rapid ecohydrological dynamics at the soil–plant interface. New Phytol 210:839–849
von Thaden A, Nowak C, Tiesmeyer A et al (2020) Applying genomic data in wildlife monitoring: development guidelines for genotyping degraded samples with reduced single nucleotide polymorphism panels. Mol Ecol Resour 20:662–680. https://doi.org/10.1111/1755-0998.13136
Wasson AP, Nagel KA, Tracy S, Watt M (2020) Beyond digging: noninvasive root and Rhizosphere Phenotyping. Trends Plant Sci 25:119–120. https://doi.org/10.1016/j.tplants.2019.10.011
Watt M, Magee LJ, McCully ME (2008) Types, structure and potential for axial water flow in the deepest roots of field-grown cereals. New Phytol 178:135–146
Weigand M, Kemna A (2017) Multi-frequency electrical impedance tomography as a non-invasive tool to characterize and monitor crop root systems. Biogeosciences 14:921–939. https://doi.org/10.5194/bg-14-921-2017
Withington JM, Reich PB, Oleksyn J, Eissenstat DM (2006) Comparisons of structure and life span in roots and leaves among temperate trees. Ecol Monogr 76:381–397. https://doi.org/10.1890/0012-9615(2006)076[0381:COSALS]2.0.CO;2
Wolfgang Böhm (1979) Glass Wall methods. In: Methods of studying root systems. Springer-Verlag, Berlin - Heidelberg, pp. 61–79
Zeng W, Zhou B, Lei P, Zeng Y, Liu Y, Liu C, Xiang W (2015) A molecular method to identify species of fine roots and to predict the proportion of a species in mixed samples in subtropical forests. Front Plant Sci 6. https://doi.org/10.3389/fpls.2015.00313
Zenone T, Morelli G, Teobaldelli M, Fischanger F, Matteucci M, Sordini M, Armani A, Ferrè C, Chiti T, Seufert G (2008a) Preliminary use of ground-penetrating radar and electrical resistivity tomography to study tree roots in pine forests and poplar plantations. Funct Plant Biol 35:1047–1058. https://doi.org/10.1071/FP08062
Zenone T, Morelli G, Teobaldelli M, Fischanger F, Matteucci M, Sordini M, Armani A, Ferrè C, Chiti T, Seufert G (2008b) Preliminary use of ground-penetrating radar and electrical resistivity tomography to study tree roots in pine forests and poplar plantations. Funct Plant Biol 35:1047–1058
Zhao L, Wang L, Cernusak LA, Liu X, Xiao H, Zhou M, Zhang S (2016) Significant difference in hydrogen isotope composition between xylem and tissue water in Populus euphratica. Plant Cell Environ 39:1848–1857
Acknowledgments
We thank three anonymous reviewers and editors for their constructive comments on earlier drafts of the manuscript and L F Wait for reviewing the English grammar and style. We are grateful to F.M. Padilla, H. de Kroon, S. Hosegood, J. Butnor, A. de Castro Aguilar, A. Illuminati and C. Díaz for their data and images. CC acknowledges funding from The May Fellowship in the Department of Ecology and Evolutionary Biology, Princeton University. HDD was supported by a fellowship of the Belgian American Educational Foundation. SM is supported by a Ramón y Cajal postdoctoral fellowship (MINECO, Spain).
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: Peter J. Gregory
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Glossary
Glossary
-
[1]
Individual Root Density Distribution (IRDD): The individual-level spatial distribution of root density in the soil relative to the location of the aboveground part of the plant, ecologically equivalent to the map of a plant’s complete root system.
-
[2]
Root density: A measure of root mass or volume per soil volumetric unit (generally root dry weight per soil cubic meters).
-
[3]
Root detection method: A technique that allows the identity of a root fragment to be resolved, either at the species level or, with higher resolution, at the individual plant level.
-
[4]
Root identification method: A technique that allows the identity of a root fragment to be resolved, either at the species level or, with higher resolution, at the individual plant level.
-
[5]
Detection-Identification (DI) method: Any particular pairing of a root detection method with a root identification method that allows researchers to extract, visualize, or infer the presence of roots of a given species or individual in a patch of soil.
-
[6]
Soil sample: A portion of soil whose spatial information –such as the position where the sample was collected and the sample volume– is known.
-
[7]
Rhizotron: Windows or transparent surfaces that allow visualization of a soil wall and the roots growing therein.
-
[8]
Tomography: An imaging technique that produces a tomogram, i.e. a group of images arranged in space. Different technologies can be used for tomographic mapping of plant root systems in the field, such as electric currents, electromagnetic waves, or acoustic signals.
-
[9]
Physiological individual: A group of plant organs that are connected and share active transportation of water and nutrients through transport tissues.
-
[10]
Genetic individual: A group of plant organs sharing a genotype originated from a single sexual reproduction event; because some plants can reproduce vegetatively, a single genetic individual may represent multiple physiological individuals.
Rights and permissions
About this article

Cite this article
Cabal, C., De Deurwaerder, H.P.T. & Matesanz, S. Field methods to study the spatial root density distribution of individual plants. Plant Soil 462, 25–43 (2021). https://doi.org/10.1007/s11104-021-04841-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11104-021-04841-z