
Abstract
This paper provides an overview of the existing literature on the subject of the assessment and monitoring of tree roots and their interactions with the soil. An overview of tree root system architectures is given, and the main issues in terms of tree health and stability, as well as the impact of trees on the built environment, are discussed. An overview of the main destructive and non-destructive testing methods is presented, and a lack of available research-based outputs in the fields of tree root interconnectivity and soil interaction is highlighted. The effectiveness of non-destructive methods in these areas is demonstrated, in particular that of ground-penetrating radar. The paper references recent developments in estimating tree root mass density and health.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The earliest identified fossil tree, from over 385 million years ago, was found in New York State, USA in 2007. Trees and plants have always been part of life on planet Earth. The impact of trees and their value to human life and the environment have been discussed in numerous publications for decades, even centuries, as suggested in https://www.savatree.com/whytrees.html. The value of trees within the context of modern life could be considered under the following areas:
Ecological and environmental
Community and social
Aesthetics
Commercial and economic
Trees and forests are every society’s asset and must be looked after and cherished. The contribution of trees and their importance to environmental sustainability is so vast that they can only be compared to the existence of icebergs and our oceans. Preventing the destruction of trees and plants by cutting them at an alarming rate for materialistic reasons (i.e. creating wealth in different shapes and forms) is vital to the preservation of life, both for humans and animals, on planet Earth. Likewise, safeguarding and having planned health monitoring and assessment of the existing trees and plants are equally important. Within this context, the understanding of the health of tree roots and plants (i.e. growth, architecture and interaction with the soil and other tree roots) are of paramount importance.
Appropriately managing and caring for natural heritage is more important than ever today (Innes 1993), and there is a growing awareness of the need to protect the environment. In particular, the preservation of veteran or ancient trees presents a series of conservation challenges that differ from standard arboricultural practices. Among all the tree organs, roots are of vital importance because they have crucial functions in plants and ecosystems: they provide anchorage, supply soil-borne resources and modify soil properties. However, even if roots account for between 10 and 65% of a tree’s total biomass, they typically lie below the soil surface, which in turn has limited our understanding of tree root system development and their interaction with the surrounding environment.
Various methods have been used to study the root systems of plants. Such investigations are usually carried out using destructive methods, such as excavation or uprooting. Although these techniques can provide direct measurements of the roots, they are onerous, time-consuming and above all destructive. The damage that these techniques inflict on trees leads to a reduction in the number of measurements which can be carried out in the future, making it impossible to assess the status of the roots during a given period. Also, root systems are often destroyed by these inspection methods, thus becoming susceptible to infections and diseases which can lead to the death of the tree.
The use of non-destructive techniques for root inspection and analysis has gained popularity in recent years, as this method can provide information about tree root architecture without harming the tree. It also enables long-term monitoring of tree root systems, as no disturbance is caused to their development by the application of these techniques. In this framework, ground penetrating radar (GPR) is widely acknowledged to be a powerful geophysical non-destructive tool, useful in locating buried objects such as bedrocks, artefacts, utilities infrastructure and objects, voids and subsurface water levels. Recently, several studies have been carried out about the use of GPR for root detection and mapping, as well as for the estimation of root biomass and diameter. This technique has shown great potential due to the reliability of the results and its ease of use. However, some research has led to contradictory results, due probably to difficulties in surveying a non-homogeneous medium such as the soil–root system. For this reason, gaining comprehensive knowledge about tree root systems is advisable in order to improve the use of GPR in this field and the understanding of achieved results.
This review aims to evaluate the state of the art in tree root system investigation, from the beginning to the most recent achievements in the field of non-destructive techniques. To this purpose, a brief introduction on tree root system architecture is presented, to broaden the understanding of root growth, development and structure, as well as the root system’s dependence on the environment and the characteristics of the soil. Following this, the main concerns regarding roots are defined and discussed, divided into health problems which could affect roots and the damage that roots can cause to the environment. The principal techniques for tree root system investigation are listed and examined, from destructive methods to non-destructive techniques. The main achievements and limitations of each method are then discussed.
Finally, a comprehensive review of GPR applications to root detection and root index quantifications is carried out, in a section organised as follows:
GPR operating principles and signal processing techniques are outlined;
The current state of knowledge about GPR use in tree root systems investigations is reviewed;
Limiting factors to root surveys using GPR are outlined;
Future perspectives are discussed.
2 Tree Root Systems Architecture
Tree roots are responsible for water and mineral uptake, carbohydrate storage and hormonal signalling (Pallardy 2008), as well as for providing support and anchorage in the ground (Coutts 1983). Thus, the health of the root system, and as a consequence the health of the tree, is closely linked to the soil conditions (Gregory 2006).
Tree roots are usually composed of complex structures, and they can be divided into two main groups:
Woody roots: roots that have gone through secondary growth, resulting in a more rigid structure. Such roots have a structural role, as they are essentially responsible for anchoring the tree in the ground, and their lifespan is perennial (Pallardy 2008). Wilson (1964) observed that woody roots that are located within one or two metres of the stem, the so-called zone of rapid taper, have different features from the roots that are located beyond this area, as the former often exhibit considerable secondary thickening. If the thickening is along the vertical plane, they are called buttress roots, the presence of which has been associated with soils that offer poor anchorage (Henwood 1973). Beyond the zone of rapid taper emanates a framework of woody structural roots that gather water and nutrients from long distances to the trunk: their size is often influenced by mechanical stresses such as the wind load (Stoke 1994).
Non-woody roots: also known as fine or absorbing roots, they are responsible for the absorption of water and nutrients (Pallardy 2008), the synthesis of rooting hormone, root exudation, and symbiosis with soil microorganisms. As the name suggests, they do not undergo secondary thickening, are generally small in diameter (< 2 mm) and their lifespan ranges from days to weeks, depending on soil conditions and temperature (Pallardy 2008).
Root architecture is quite complex and varies between and within plant species (Gregory 2006). As far as rooting depth is concerned, it is influenced not only by the tree species but also by the type and conditions of the soil (Stone and Kalisz 1991): in fact, the downward penetration of roots can be impeded by soils that are poorly aerated or too dense, and by the presence of rock layers or by low soil temperatures. Stone and Kalisz (1991) carried out an extensive study on tree roots, reviewing the existing literature and performing on-site surveys on a wide variety of tree species, demonstrating that root extent is strictly related to site conditions. Indeed, evidence has been found that many species can reach considerable depths if not limited by soil characteristics. According to Jackson et al. (1996), there can be significant differences in rooting depths, depending on the features of the surrounding environment: rooting profiles are shallowest in boreal forests, temperate grasslands, and tundra, due not only to the convenient characteristics of soil moisture and aeration but also the presence of physical barriers to root vertical growth, such as permafrost in tundras and some boreal forests (Bonan 1992). On the other hand, root distribution is deeper in deserts and xeric shrublands, as the lack of water and nutrients in the shallow subsurface, together with extreme soil surface temperatures, inhibits root development in the upper soil layers (Nobel 2003) and forces them to grow deeper. Regardless, there is undoubtedly a tendency for tree roots to be concentrated in the surface soil (Wilson 1964; Wang et al. 2006), as it is usually better aerated and moist; it contains a higher concentration of minerals than the deeper layers. Pallardy (2008) states that root density is often higher in the first 30 cm below the soil surface.
On the other hand, root spread seems to be less closely related to soil temperature and characteristics (Strong and La Roi 1983). The extent of root development seems to rely upon the tree species, but also upon the stand density (Stone and Kalisz 1991) and the presence of competing species (Shainsky and Radosevich 1992). Many rules of thumb have been presented for estimating root spread, the most common of which is a relation between root extent and canopy diameter (Tubbs 1977); however, Stone and Kalisz (1991) reported many examples of a maximum lateral root extent of more than 30 m from the trunk, and in some cases more than 50 m. This seems to demonstrate that roots tend to explore the largest soil area possible, in order to exploit its resources and provide anchorage and stability. These estimates commonly assume that there are few significant physical impediments to root extent; moreover, not much is known about how different trees compete for water and mineral uptake when root systems come in contact with one another.
3 Main Issues
3.1 Health and Stability of the Tree
Tree diseases are an integral part of natural ecosystems, as they regulate the development of forests (Hansen and Goheen 2000). The coexistence of plants and pathogens is therefore necessary for the survival of both. However, human activities have often altered the natural balance, breaking down the geographical barriers that had preserved the ecosystems and allowing the movement of wild species (Richardson et al. 2001). As a consequence of the increase in the global trade of plants, alien pathogens and fungi have invaded entire regions (Santini et al. 2012; Liebhold et al. 2012), sometimes with devastating consequences, as in the Dutch elm disease (Gibbs 1978) and the chestnut blight (Anagnostakis 1987) cases. Such diseases not only have severe ecological consequences, but they can also have economic repercussions (Aukema et al. 2011).
Fungal infections are one of the main causes of root disease, as fungi are natural components of forests (Hansen and Goheen 2000). These typically contaminate trees which have already been weakened by other factors, such as other pests or climatic changes (Williams et al. 1986), and they usually spread from the roots of dead or uprooted trees (Rishbeth 1972). Fungi penetrate the bark and initiate decay in roots, inducing root rot and infecting coarse roots and the lower stems of trees (Fig. 1).

(Canadian Forest Service 2015)
Roots and lower stem of a tree infected by Armillaria root rot fungi
Plants can live for a long time even if sick, as they continue to collect water and nutrients from healthy roots. Within this time, the infection can spread to other trees through root contact (Hansen and Goheen 2000). Eventually, rotten roots will not be able to provide anchorage and sustenance, and the contaminated tree will die either by wind-throw or disease (Rishbeth 1972).
The recognition of root diseases is difficult, as fungal infections do not show visible symptoms. Manifestations of diseases can include the production of mushrooms around the tree base, foliage discolouration and reduced growth (Williams et al. 1986). However, these symptoms can take several years to materialise if the tree is large or old, and by the time the disease is recognised, it is often too late for any interventions.
3.2 Built Environment
3.2.1 Buildings
Despite being an essential presence in urban and archaeological sites, trees can also cause damage to structures and buildings. Damage can occur through direct contact with tree roots (Satriani et al. 2010), as their growth can cause structures to uplift. This is more likely to take place near the tree trunk, as the pressure exerted by roots decreases rapidly with distance (MacLeod and Cram 1996). This usually occurs when trees are allocated an inadequate space: as the tree grows up, the roots start spreading and making their way underneath buildings (Day 1991). The pressure that roots are capable of exerting is fairly weak and is further diminished by urban soil compaction (Roberts et al. 2006). Moreover, modern building foundations are designed to withstand root-induced movement.
Indirect damage is a more common cause of disturbance to structures, especially the shrinkage of expansive soils (Driscoll 1983). Roots belonging to trees growing close to buildings tend to develop under the foundations, as the moisture content there tends to be higher than in the surrounding soil (Fig. 2). The extraction of water by roots creates a reduction in soil volume, resulting in subsidence and cracks in the structures (Day 1991).

Tree roots growing under foundations
Cutler and Richardson (1981) and Biddle (2001) have reviewed several cases of damage to buildings, producing an extensive analysis of how tree–root interaction with the surrounding environment can damage buildings. Regarding damage to ancient structures, Caneva et al. (2006) have carried out a risk evaluation of root-induced damage which archaeological sites are exposed to, while Caneva et al. (2009) have surveyed the archaeological site of Villa Torlonia in Italy, investigating the root expansion and evaluating the tendency of various species to harm ancient monuments.
3.2.2 Utilities
Underground services, especially sewers, are frequently obstructed or damaged by the growth of roots. This damage usually occurs in old systems (Randrup et al. 2001b), as these were built with materials which could deteriorate with time, such as bricks or concrete. Moreover, roots are attracted by the presence of moisture around pipes, which are commonly cooler than the surrounding soil (Brennan et al. 1997) and tend to grow around the pipe (Fig. 3).

Roots growing around a pipe
Modern sewers are made of plastic, iron or reinforced concrete, which are unlikely to be damaged by root growth pressure. Potential leakages due, for example, to a broken joint (Schrock 1994) or poor construction (Sullivan et al. 1977; Brennan et al. 1997) can lead to roots penetrating the pipe, and eventually blocking it.
3.2.3 Roads and Pavements
Urban trees provide several environmental, social and economic benefits, but they can also cause extensive damage to road infrastructures. Root development can cause disruptions to road surfaces, such as cracking or uplifting (Francis et al. 1996) (Fig. 4). This damage can have serious consequences (Tosti et al. 2018a), leading to additional pavement maintenance or repair and interventions on the tree (Mullaney et al. 2015).

Damages to road pavement due to tree roots
One of the principal causes of conflict between roots and infrastructures seems to be the limited space provided for the development of trees (Barker 1983; Francis et al. 1996). Tree size at maturity should be considered when choosing tree species to plant, as it will influence the necessary volume of soil (Trowbridge and Bassuk 2004). Such amounts of soil are not typical of urban environments, and trees are usually confined to tree lawns, which restrict not only the roots but also the branch and canopy development (Pokorny et al. 2003). Also, trunk flare and root buttresses are associated with road infrastructure damages (Wagar and Barker 1983), and the tendency of species to develop them should be considered when choosing which tree to plant (Costello and Jones 2003). Finally, when large trees are planted in cities, there is a significant danger of wind-throw, as tree roots are often cut during pavement repairs and therefore cannot offer sufficient resistance to wind load (Pokorny et al. 2003). Therefore, a selection of species adequately matched to the site conditions is advisable (Costello and Jones 2003), as this can lead to a significant reduction of hazards; however, McPherson and Peper (2000) state that this resolution would reduce the benefits gained from larger trees.
Another factor which limits root development is soil compaction, as it decreases soil aeration, restricts air and water movement, limits water-holding capacity and impedes root penetration (Boyer 1995). This is a significant issue in urban areas, as it conflicts with road engineering specifications, which require a load-bearing base to support pavement loading (Grabosky et al. 1998). The essential requirement is to increase soil compaction in order to reduce cavities and increase contact between the grains, thus giving the lithic structure a high frictional resistance. Moreover, this minimises deferred subsidence, providing greater functionality and security to the infrastructure. The resulting level of compaction produces unbearable conditions for root growing (Blunt 2008; Grabosky et al. 2009) as it limits access to oxygen, water and nutrients (Loh et al. 2003; Lucke et al. 2011; Tracy et al. 2011). Table 1 compares the prescriptions for bulk densities of soils based on the Proctor Compaction Test (ASTM D698/AASHTO T99) with the maximum level of compaction, which inhibits root penetration.
Such levels of compaction cause roots to develop at the interface between the pavement and soil, where nutrients and moisture are available (Kopinga 1994; Randrup et al. 2001a; Wagar and Franklin 1994). The favourable conditions that roots find at the interface between the surface layer and the sub-base make them grow faster, resulting in accelerated secondary thickening that can cause damage to the road surface (Nicoll and Armstrong 1998).
Other issues that can interfere with root growth in urban environments and lead to road infrastructure damage are waterlogging (Boyer 1995; Pokorny et al. 2003) and severe water deficiency (Boyer 1995; Mullaney et al. 2015). In the former case, soil saturation displaces air, making soil aeration more restrictive as depth increases and therefore forcing roots to grow within the soil surface; these conditions encourage the development of root pathogens. In the latter case, water deficit causes trees to slow down their leaf growth, resulting in a surplus of carbohydrates, which then become available for root growth. The immediate consequence, therefore, is that the root dimensions of water-stressed plants are higher than average.
4 Detection and Mapping of Tree Root Systems
Locating tree roots and estimating their depth and spread is a significant challenge and a necessary condition for several practices, ranging from tree health preservation to safety assessment in urban areas. There are several methods for studying roots available, which can be divided into destructive or non-destructive techniques.
4.1 Destructive Testing Methods
Destructive testing methods allow for the investigation of root systems at the time of sampling. Therefore, they are of limited value for investigating developmental processes. Moreover, these techniques are not only destructive to the root system itself and its immediate environment (Taylor et al. 1991), but are also expensive, time-consuming and laborious (Krainyukov and Lyaksa 2016). Given root system architecture variability, several replicated samples are needed to precisely assess root parameters, but this practice destroys the roots and exposes the tree to diseases and infections that can lead to its death (Smit et al. 2013). However, these techniques are still widely used, as they provide reliable quantitative results.
The main destructive techniques are:
Ingrowth core;
Auger method;
Monolith method.
4.1.1 Ingrowth Core
Ingrowth cores are commonly used to quantify fine root production and to estimate the rate of growth during a given period (Smit et al. 2013). They are also adopted to examine the effect of experimental manipulation on root growth (Majdi et al. 2005). The operating principle of this technique is to replace a volume of soil (as it is) with the same volume of root-free soil, enclosed in a mesh bag, which is resampled after a determined period (Fig. 5). This method is widely acknowledged to be straightforward and inexpensive, and it illustrates how long it takes for roots to develop in a particular soil. However, it can lead to misinterpretation, as the soil structure is altered when the mesh bags are introduced into the cores (Smit et al. 2013), and this can affect root growth rates. Moreover, since roots are damaged by the initial coring, their development into the root-free samples can be unnatural (Majdi et al. 2005).

Procedure for installing the mesh bags for the root ingrowth core technique (Smit et al. 2013). (a) a core of soil is removed and (b) the soil is sieved to remove the roots; (c) a mesh bag is placed in the hole, which is filled with the sieved soil; (d) the soil is packed to the original bulk density by means of a pestle; (e) the mesh bag is left in place for a determined period of time, after which it is recovered; and (f) non-woody roots are trimmed
4.1.2 Auger Method
The auger method is the most convenient for investigating root density. It involves taking soil samples from the field, which are then washed to separate roots from the soil (Bohm 2012; Smit et al. 2013). The soil core extraction can be made using either a hand-operated or a mechanical sampler, depending on the hardness of the investigated soil. The former is faster to use, being a cylindrical tube 15 cm long with an inside diameter of 7 cm, equipped with a T-handle at the top that simplifies the penetration into the soil by rotation. However, if core samples need to be taken from hard soil or considerable depths, the auger is driven into the soil by a motorised dropping hammer and then pulled back using a screw-jack (Smit et al. 2013).
There exists uncertainty about the frequency of samples required in order to obtain reliable results (Bohm 2012); however, increasing the number of samples will lower the uncertainty and improve the variability of data collected (Smit et al. 2013). Consequently, this technique is time-consuming (Majdi 1996) and the large number of replicates required harms a considerable part of the investigated root system (Smit et al. 2013). Moreover, the type of soil can prevent the sampler from being inserted, such as in stony or dry clay soils (Smit et al. 2013).
4.1.3 Monolith Method
The monolith method requires large blocks of soil to be removed and washed out, in order to separate the roots from the soil (Boyer 1995; Bohm 2012). Contrary to the auger method, which requires just the root volume to be quantified, in this technique roots are washed without displacing them from their original position (Weaver and Voigt 1950). This is possible thanks to the use of special boards covered with spikes, called pinboards, which are driven into the soil to preserve the root architecture while the soil is washed away (Boyer 1995; Fig. 6).

(Leskovar et al. 1994)
Metallic monolith pinboard used for excavating the soil–root samples (left) and roots after extraction and washing from the soil (right)
This technique provides useful information, as it is possible to have a general view of the root system architecture (Smit et al. 2013). On the other hand, the collection of the samples requires great skill in order not to displace the roots, so the pinboards are usually of limited dimensions; additionally, the washing process can introduce biases, as significant losses of fine roots can occur (Smit et al. 2013). Finally, this method is often non-repeatable, as the hole will be filled up with new soil that could lead the roots to develop differently, affecting the results of a second inspection (Schuurman and Goedewaagen 1965).
4.2 Non-destructive Testing Methods
Non-destructive evaluations are acknowledged as being effective in investigating different materials, without harming or damaging them (Buza and Divos 2016). Furthermore, these techniques are easily repeatable, which means that long-term investigation and monitoring of trees can be achieved (Buza and Divos 2016).
The main non-destructive techniques applied in root system investigations are:
Rhizotrons and minirhizotrons;
Pulling test;
Electrical resistivity tomography (ERT);
Acoustic detection;
X-ray computed tomography (CP);
Ground penetrating radar (GPR).
4.2.1 Rhizotrons and Minirhizotrons
One of the first non-destructive testing (NDT) methods for tree root system observations was to put glass plates into the soil, so that it was possible to observe root development and growth against them. This method has evolved into the modern rhizotron, namely an underground chamber equipped with glass walls (Boyer 1995).
This technique provides repeated and non-destructive access to soil and roots, allowing for a better understanding of underground processes as they are in nature. Nevertheless, since such an instalment is impossible to set up for assessment of urban trees, minirhizotrons have become increasingly popular. These instruments consist of small plastic tubes (about 5 cm in diameter and 2 to 3 m long), which can be driven into the ground at different angles (Majdi 1996). A fibre-optic light and a camera are then lowered down the tube, in order to observe the roots’ developmental process over time (Boyer 1995), sometimes in combination with dedicated image processing software (Majdi 1996) (Fig. 7).

(Eshel and Beeckman 2013)
Minirhizotron typical set-ups (diagonal and vertical installation)
This method is commonly used for quantitative investigations on root length production, root length mortality, longevity, rooting density and root diameter, as well as to achieve qualitative information about root colour, branching and decomposition (Majdi 1996).
The main limitations of this technique are linked to its installation in hard or stony soils (Majdi 1996). Moreover, the viewing window is static, providing only a limited, 2-D visualisation that is unrepresentative of the architecture of a tree root system (Mooney et al. 2012). Another limitation arises from the fact that rhizotrons are not totally non-invasive, as they may create an altered soil–root interface that could affect root growth (Amato et al. 2009; Neumann et al. 2009). Finally, the effectiveness of minirhizotrons as opposed to other techniques, especially when used in the shallow subsurface, is still an object of discussion (Heeraman and Juma 1993).
4.2.2 Pulling Test
The pulling test is principally applied to test the root system anchorage to the soil. Its primary application is the assessment of the reaction of the tree to a determined load, especially the one caused by the wind (Buza and Divos 2016), in terms of the resulting bending of the stem and the inclination of the root plate (Fay 2014).
During a pulling test, a load is applied to the subject tree by securing a cable to the tree trunk. The pulling force applied using a load cell or force metre is measured, and factors such as the inclination, elongation and dislocation of the ground are monitored (Buza and Divos 2016; Marchi et al. 2018) (Fig. 8). In order to evaluate the risk of tree uprooting, an inclinometer is applied to the trunk close to the ground. Depending on the tree species and conditions, limits are placed on the possible inclination of the tree, in order to prevent damage to tree roots. Destructive pulling tests were conducted in several studies (Coutts 1983; Brudi and Wassenaer 2002; Lundström et al. 2007), which report root failure models and maximum inclination values for different tree species.

(Marchi et al. 2018)
Schematic representation of a pulling test
The primary output of a pulling test is a safety factor, which is given by the ratio between the tree capacity and the calculated load (Buza and Divos 2016). According to field studies (Fay 2014), a tree is considered stable when its safety factor is greater than 1.5. The pulling test provides useful information on the stability of trees, evaluating their resistance to external loads. It can be performed not only to assess the tree root plate conditions, but also the status of the trunk in terms of maximum bending moment (Fay 2014). However, the main limitation of this method is that it is not completely non-invasive, as both the trunk and the roots can be damaged when the pulling force is applied (Marchi et al. 2018).
Other limitations to this methodology arise from the fact that the applied load cannot represent the complex action of the wind, but can only cause a reaction in the tree which can be compared to the one produced by the wind load (Fay 2014). Moreover, the test could be affected by factors such as the temperature conditions of both the soil and the tree (Buza and Divos 2016). Finally, the pulling test cannot predict the moment or the conditions under which the tree will fail (Fay 2014), but can only assess the conditions of the tree at the time of testing.
4.2.3 Electrical Resistivity Tomography
Electrical resistivity tomography (ERT) is a geophysical technique used for the calculation of the subsurface distribution of soil electrical resistivity (Zenone et al. 2008). Electrical resistivity (\(\rho\)) is defined as the electrical resistance through a uniform body of unit length and unit cross-sectional area and represents a measure of the ability of materials to limit the transfer of electrical current. This method has been extensively used for the characterisation of soil heterogeneity.
Soil resistivity is measured by applying electric currents through at least two conductors (current electrodes) and measuring the resulting differences in electric potential (voltage) on at least two separate conductors (potential electrodes). There are different possible geometric configurations for electrodes. The potential electrodes could be placed between the current electrodes (Wenner array, Fig. 9) or consecutive to them (dipole–dipole configuration). The investigation depth relies on the configuration choice and increases with the spacing between electrodes (Amato et al. 2009). The voltage distribution in space is a function of the different resistivity of soil volumes (Kearey et al. 2013).

General ERT operating principles for a Wenner array configuration
Geophysical surveys performed using electrical exploration have qualitative purposes and are based on the contrast between the resistivity of different soil layers or the heterogeneous materials within each layer. In heterogeneous media, the current flow lines are deformed and tend to be concentrated in conductive volumes. Resistivities are first calculated according to the theoretical flow-line distribution in isotropic media and are called apparent resistivity values. These are attributed to soil coordinates corresponding to the hypothesis of homogeneous current distribution and arranged in a pseudosection. In order to obtain real resistivity values, correctly positioned in space (true section), a procedure called inversion is applied. The investigated soil domain is divided into elementary cells, and resistivity data are imaged by attributing values corresponding to each elementary soil volume to a point corresponding to the intersection of two lines conducted through the centres of the quadrupoles (Fig. 10) (Amato et al. 2009).

(Amato et al. 2009)
Data acquisition and processing in ERT; a a linear array of electrodes with two quadrupoles at minimum spacing (top) and one quadrupole at maximum spacing (bottom). Dots represent electrodes and full triangles represent the centre of soil volumes measured by the corresponding quadrupole; b soil apparent resistivity 2D pseudosection obtained after data acquisition; c soil resistivity 2D section obtained after data inversion with numerical modelling
ERT has been widely applied for detecting soil compaction (Besson et al. 2004), water content and flow in soil and plants (Loperte et al. 2006), soil cracks (Samouelian et al. 2005) and tillage effects (Basso et al. 2010). The plant root zone shows variations in soil electrical resistivity (Panissod et al. 2001), and resistive soil volumes have been correlated to large tree root structures (Amato et al. 2008; Zenone et al. 2008). Amato et al. (2008) conducted research in which the root biomass of alder trees was accurately mapped in 2D. This study demonstrated that the use of ERT for the non-destructive characterisation of root systems’ spatial structure could reduce the coefficient of variability of root measurements, which is more significant than that of above-ground plant parts (Amato and Ritchie 2002).
A quantitative relationship between the electrical resistivity of the soil and the biomass of the roots has been widely demonstrated (Loperte et al. 2006; Amato et al. 2008). However, in the case of low root biomass densities, the electrical response of the roots is indistinguishable from the background noise. In fact, it is assumed that it is of the same order of magnitude as the response coming from the other characteristics of the soil and consequently too weak to be detected (Amato et al. 2009).
The main advantage of this technique is that it is totally non-destructive, as it does not disturb the structure nor the functioning of soil. Subsurface heterogeneities can be determined, in one, two or three dimensions, both non-invasively and dynamically (Samouelian et al. 2005). Variations in time of root systems can be obtained, and different and more detailed information can be obtained by varying the operating configurations or the distance between the electrodes, depending on soil properties. Furthermore, this methodology has a low application cost and can be applied on a large scale.
However, this investigation technique can be influenced by several factors, which could potentially act at the same time, making interpretation of the results difficult. Systematic errors can result from poor electrode contact or noise averaging, although these can be avoided by carrying out replicated and reciprocal measurements (positive and negative current and potential electrodes reversed) (Samouelian et al. 2005). Moreover, ERT field investigations should be coupled with laboratory studies, to calibrate the resistivity against different soil conditions (Samouelian et al. 2005).
4.2.4 Acoustic Detection
The acoustic detection of wood is widely used for tree investigations, ranging from the detection of decay, cracks, hollows or holes (Buza and Goncz 2015; Wang et al. 2007; Grabianowski et al. 2006) to material characterisation for wood evaluation and quality assessment (Bucur 2006). Therefore, the acoustic detection of roots has been tested, based on the difference of velocity in wood and soil. In fact, the velocity of the acoustic signal in soil is between 250 and 400 m/s, depending on soil type and moisture content, while the velocity in wood is between 2000 and 4000 m/s (Bucur 2006; Buza and Goncz 2015).
The device for acoustic measurements consists of a transmitter, a receiver and a time-measuring component. The transmitter is needle-like and must be placed onto the trunk at ground level, while the receiver is a long metal spike (30 cm or longer), which has a suitable coupling for the soil (Fig. 11) (Buza and Goncz 2015). During an investigation, the transmitter sends a very short signal, which is then reflected and read by the receiver. The presence of roots decreases the travel time significantly, making it possible to locate them.

(Buza and Goncz 2015)
Device for acoustic detection of roots
Using this technique, it is possible to identify roots with a diameter of 4 cm upwards, with a maximum depth of investigation of 50 cm. Furthermore, it is possible to separate two roots from each other if they are at least 20 cm apart (Buza and Divos 2016). These achievements are limitations as well, as the detection of small or deep roots is not possible. Furthermore, research carried out by Iwase et al. (2015) demonstrated that the signal is highly sensitive to water content. Finally, other buried objects, such as rocks, can disguise the signal, making it difficult to recognise root system architecture correctly (Divos et al. 2009). Given that this methodology, despite the promising results, is still in its infancy, it is often coupled with other NDT methods, in order to further investigate its potential (Buza and Goncz 2015).
4.2.5 X-Ray Computed Tomography
X-ray computed tomography (CT) is a non-destructive, non-invasive technique that can be used to visualise the interior of objects in 2D and 3D based on the principle of attenuation of an electromagnetic wave. X-ray CT has been repeatedly demonstrated to be an efficient methodology for imaging and studying soil systems. CT uses X-rays to obtain cross-sectional images of an object, which contain information regarding the attenuation of the X-rays, a function of the density of the sample material (Mahesh 2002). These slices are then reconstructed to provide a 3-D visualisation of the sample volume.
During CT acquisition, X-rays are produced in a highly evacuated tube, which contains an anode, usually platinum or tungsten, and a cathode (Wildenschild et al. 2002). When a high voltage is applied across these electrodes, accelerated electrons produce X-rays as they strike the anode. As the X-ray beams pass through a sample, the object itself becomes a secondary source of X-rays and electrons. A portion of the primary incident beam is therefore absorbed or scattered. This reduction in intensity of the X-ray as it passes through the investigated object is called attenuation. The beam is projected onto the detector, which measures the change in energy intensity (Mooney et al. 2012).
X-ray CT offers great potential for examining undisturbed root systems architecture in soils, and its potential has been widely investigated within the last decades (Heeraman et al. 1997; Gregory et al. 2003). The imaging of plant roots in soil using X-ray CT relies on sufficient contrast in X-ray attenuation between growth medium solids, air-filled pores, soil water, plant material and organic matter. The attenuation of these materials varies with several factors including soil type, soil moisture content, the proximity of roots to organic matter or air-filled pores and root water status (Kaestner et al. 2006).
The limitations of this technique are the overestimation of root diameter during image analysis due to the proximity of water and air within the soil (Perret et al. 2007), and the underestimation of root length and number of lateral roots due to the fact that root material cannot be easily distinguished from other soil components. To minimise the effects of similar attenuation between the soil and plant fractions, researchers have focused on plants with coarse roots (Hargreaves et al. 2009), artificial soil systems (Perret et al. 2007), manipulating the water content of the sample and undertaken convoluted image processing to enhance contrast. Still, it is difficult to distinguish the boundaries between adjacent structures (Mooney et al. 2012).
Advancements in CT technology include a reduction in scan and reconstruction times by at least an order of magnitude, automated algorithms to remove artefacts and more sophisticated detectors that have significantly increased the raw scan image quality (Mooney et al. 2012). Research is now focused on investigating this technique’s future potential in terms of the interaction between roots and their soil environment (Tracy et al. 2010).
5 Ground Penetrating Radar
Ground penetrating radar (GPR) is a non-destructive testing method used to detect changes in physical properties within the shallow subsurface (Daniels 1996). The operating principles of a GPR system are based on the theory of electromagnetic (EM) fields, which is described by Maxwell’s equations (Jol 2008). In addition, GPR effectiveness relies on the response of the investigated materials to the EM fields, which is ruled by the constitutive equations (Jol 2008). Therefore, the combination of the EM theory with the physical properties of the material is essential for a quantitative description of the GPR signal.
5.1 GPR Theoretical Background
A standard GPR system consists of three essential components: a control unit (including a pulse generator, computer and associated software), antennas (including paired transmitting and receiving antennas) and a display unit (Guo et al. 2013) (Fig. 12). During a GPR investigation, the transmitting antenna generates short impulses of EM energy, which are launched into the investigated medium where they propagate as waves (Daniels 1996). When these waves hit a target with different electrical or magnetic properties, reflections are generated, which are then diffracted back towards the surface and recorded by the receiving antenna. The remaining energy, conversely, continues to travel into the medium until it is completely attenuated (Daniels 1996). The control unit samples and filters the collected information and then combines it into a reflection trace (also named A-scan), recording the time between the emission of the reflected signal and its reflection on the vertical axis and the amplitudes of the received signals on the horizontal axis (Daniels 2004). Being an individual trace, the A-scan provides punctual information about the subsurface configuration (Benedetto et al. 2017b).

GPR operating principles
The depth of a target can be derived from the propagation velocity (\(V\)), as follows (Daniels 1996):
where \(D\) in the depth and \(t\) is the two-way travel time. Instead, wave velocity can be calculated from the following equation (Lorenzo et al. 2010):
where \(\mu\) is the magnetic permeability; \(\sigma\) is the electrical conductivity; \(\varepsilon\) is the dielectric permittivity; \(\omega\) is the angular frequency. (\(\omega = 2\pi f\), where \(f\) is frequency) of the emitted pulse.
A formula for the estimation of propagation velocity for low conductive and nonmagnetic materials (\(\sigma \ll \omega \varepsilon\) and \(\mu_{r} = 1\), where \(\mu_{r}\) is the relative magnetic permeability) has also been proposed (Jol 2008; Daniels 2004):
where \(c\) is the speed of light in vacuum (0.2998 m per nanosecond); \(\varepsilon_{r}\) is the relative dielectric permittivity.
The reflected energy amplitude at an interface between two materials depends on the reflection coefficient \(R\) (Attia al Hagrey 2007):
where \(\varepsilon_{r1}\) is the relative dielectric permittivity of the overlying material; \(\varepsilon_{r2}\) is the relative dielectric permittivity of the underlying material; \(V_{1}\) is the propagation velocity in the overlying material; \(V_{2}\) is the propagation velocity in the underlying material.
During a survey, GPR is moved along a detection transect, and EM pulses are generated at a specified interval of time or distance. As reflected signals are recorded, traces can be integrated into a radargram (also called B-scan) that allow for a 2D representation of the subsurface (Fig. 13). The B-scan mode is a widely used imaging methodology, as it permits to visualise the presence of buried objects (Bianchini Ciampoli et al. 2019).

A typical radargram or B-scan
The GPR transmitting antenna produces energy in the form of a beam that penetrates into the ground in the form of an elliptical cone. As the propagation depth increases, the cone radius also expands, resulting in a larger footprint scanned beneath the antenna (Fig. 14a). The footprint area can be approximated by the formula (Conyers 2002):
where \(A\) is the long dimension radius of footprint; \(\lambda\) is the centre frequency wavelength of radar energy; \(D\) is the depth from the ground surface to the reflection surface; \(\varepsilon_{r}\) is the average relative dielectric permittivity of scanned material from the ground surface to the depth of reflector (\(D\)).

Schematic illustration of the conical radiating pattern of GPR waves and generation of a reflection hyperbola (Guo et al. 2013): a development of a footprint with increasing travelling time; b detection of a buried object with the creation of a reflection hyperbola
Based on this feature of propagating waves, radar energy will therefore be reflected before and after the antenna is positioned above a buried object. As the antenna moves closer to the object, the recorded two-way travel time decreases, while when the antenna moves away from it, the same phenomenon is repeated conversely, generating a reflection hyperbola, the apex of which indicates the exact location of the buried object (Guo et al. 2013) (Fig. 14b).
The GPR resolution, and therefore its capability to discriminate between two closely spaced targets as well as the minimum size detectable, correlates negatively with the footprint area. GPR detection resolution depends on the antenna frequency, the EM properties of the medium, and the penetrating depth (Hruska et al. 1999). Therefore in a survey, the selection of the appropriate GPR features, including frequency operations, the type of antenna or its polarisation rely on a number of factors, such as the size and shape of the target and the transmission properties of the investigated medium, as well as the characteristics of the surface (Daniels 2004).
Advances in GPR data processing and visualisation software have allowed for the creation of 3D pseudo-images (also called C-scans) of the subsurface, obtained by interpolating multiple 2D radargrams. A C-scan provides an amplitude map at a specific time (or depth) of collection (Benedetto et al. 2017b) and is therefore helpful in visualising a trend of the amplitude values all over the investigated domain.
In regard to GPR data processing and analysis, appropriate signal processing techniques are needed to provide easily interpretable images to operators and decision-makers (Daniels 2004). Most of the techniques that are applied today originate from seismic theory (Benedetto et al. 2017b), as both disciplines involve the collection of pulsed signals in the time domain. It is not possible to establish a unique methodology, as it depends on the purpose of the survey, the features of the used radar and the conditions of the investigated medium. Furthermore, the analysis of GPR data is a challenging issue, as the interpretation of GPR data is generally non-intuitive and considerable expertise is therefore needed.
5.2 GPR Applications in the Assessment of Tree Root Systems
GPR has been employed for many applications and in several disciplines, such as archaeological investigations (Goodman 1994), bridge deck (Alani et al. 2013) and tunnel analyses (Alani and Tosti 2018), the detection of landmines (Potin et al. 2006), civil and environmental engineering applications (Tosti et al. 2018b; Benedetto et al. 2015, 2017a; Loizos and Plati 2007), and planetary explorations (Tosti and Pajewski 2015), for about 40 years.
Although GPR has commonly been used to characterise soil profiles (Lambot et al. 2002; Huisman et al. 2003), roots have often been considered an unwanted source of noise that usually complicates radar interpretation (Zenone et al. 2008). However, over the past decade, GPR has been increasingly used for tree root assessment and mapping, as it is completely non-invasive and does not disturb the soils or bring harm to the examined trees or the surrounding environment. For these reasons, repeated measurements of root systems are possible, allowing for the study of the roots’ developmental processes.
The first application of GPR that relates to the mapping of tree root systems dates back to 1999 (Hruska et al. 1999). In this study, a GPR system with a central frequency of 450 MHz was employed to map the coarse roots of 50-year-old oak trees, and measurements were taken in two directions within a 6 m by 6 m square, with a 0.25 m × 0.25 m profile grid, at 0.05-m intervals. After data processing, the root system of the large oak tree was analysed in detail by applying depth correlations of GPR indications from single profiles to develop a 3D picture. Additionally, the root system was excavated and photographed, and root lengths and diameters were measured to verify the radar data. The researchers confirmed that the resolution of the GPR system was sufficient to distinguish the roots that were 3 to 4 cm in diameter. Diameters of roots detected by the GPR system corresponded to measured diameters of excavated roots with an error of between 1 and 2 cm. The GPR system determined the length of individual roots, from the stem to the smallest detectable width, with an error margin of about 0.2 to 0.3 dm. Higher frequencies together with smaller measurement intervals were applied, and this method improved the resolution and accuracy to less than 1 cm. In conclusion, the researchers claimed to have successfully tested GPR in a forest and woodland environment, where the soil is relatively homogenous. The output of this study was criticised several years later (Guo et al. 2013), because the 3D views of the coarse root system were redrawn manually based on the GPR radargram, but no specific information was provided regarding how it had been done (Fig. 15). Assuming that the maps were redrawn arbitrarily according to the operator’s personal experience, bias may therefore have been introduced.

(Hruska et al. 1999)
Hand-drawn reconstruction of a tree root system based on the analysis of GPR data
Attempts to map tree root systems have continued throughout the years (Sustek et al. 1999; Cermak et al. 2000; Wielopolski et al. 2000), with alternate and controversial results. The most significant barrier to mapping complete root systems with GPR is the inability to distinguish individual roots when tight clusters of roots are encountered, as they give one only large parabolic reflection (Butnor et al. 2001). Furthermore, many pieces of research were carried out under controlled conditions (Barton and Montagu 2004), therefore limiting the significance of the results for in situ tree root mapping. Moreover, the minimum detectable size for tree roots is still a subject of discussion. In fact, tests conducted under controlled conditions confirmed that it was possible to detect fine roots (0.5 cm in diameter or less) (Butnor et al. 2001), while tests carried out in the field demonstrated that only coarse roots with diameters greater than 5 cm could be identified (Ow and Sim 2012).
Furthermore, research has concentrated on the use of GPR as an appropriate tool for use on valuable trees, or trees in situations where excavation is not possible, such as growing near pavements, roads, buildings or on unstable slopes (Stokes et al. 2002). GPR data were able to reliably locate roots under pavements and provided a reasonably accurate root count in the compacted soil under concrete (Bassuk et al. 2011) and asphalt (Cermak et al. 2000). This is possible thanks to the difference in water content between roots and soil, which can provide the necessary permittivity contrast and therefore allow root detection by GPR (Wielopolski et al. 2000). Also, it facilitates the distinction between roots and buried utilities (i.e. cables and pipes), which could otherwise generate signal interference, affecting the GPR survey (Ow and Sim 2012).
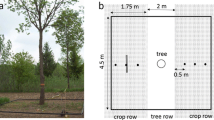
Another testing issue that has been investigated is the survey methodology. Two experimental sites situated in Italy, subject to different climates and hydrological conditions, were investigated for this purpose (Zenone et al. 2008). In this study, GPR measurements were taken using antennas of 900 and 1500 MHz applied in square and circular grids (Fig. 16): even though square grids are preferable for GPR lines, results obtainable with circular transects (created by rotating the GPR around the tree, keeping a constant radial distance) were tested to ensure a quasi-perpendicular scanning of root systems. The major difficulty in this set-up, however, arose from soil unevenness, as it was challenging to push a radar system in circles over roots and stones.

(Zenone et al. 2008)
GPR set-ups for tree root system survey using (a) circular transects and (b) square grids
Most of the aforementioned methodologies tested the reliability of their results by digging or uprooting the investigated trees. Zenone et al. (2008) excavated the root system with an air-spade and pulled it out using a digger; a laser measurement system was then applied in order to create a scan, and the 3D root system architecture was reconstructed. A comparison between the laser scan point cloud and the sections of GPR scans (Fig. 17) returned a limited grade of correspondence, and the authors stated that this might be due to an alteration of the root system architecture that occurred during the excavation. Nevertheless, the use of GPR for 3D coarse root system architecture reconstruction was further criticised (Guo et al. 2013).

(Zenone et al. 2008)
Comparison between 3D rendering from a laser scanner and GPR B-scans
Besides the recognition of tree roots, a challenge that is still being discussed is the quantification of the biomass of tree roots. As is widely acknowledged, the estimate of tree root mass density is crucial for the evaluation of the health status of the tree, for the stability of the tree itself and the stability of the soil, as tree roots are used for the reinforcement of slopes. Not least, root mass evaluation is essential for understanding the storage of carbon in the ecosystem (Stover et al. 2007).
Traditional methods for estimating root biomass are usually destructive, time-consuming and expensive, as well as often inaccurate (Birouste et al. 2014). The application of NDT methods in this research area is still at the early stage, and the achieved results are still not accurate enough (Aulen and Shipley 2012).
GPR has proven to be efficient in the estimation of coarse root biomass (Guo et al. 2013). Several studies have been conducted so far in field conditions (Butnor et al. 2001, 2003, 2008; Stover et al. 2007; Samuelson et al. 2008; Borden et al. 2014) and in laboratory environment (Cui et al. 2011). GPR has shown potential for root quantification, as coarse root biomass has been assessed with reasonably good accuracy (Guo et al. 2013). However, uncertainty still affects the precision of the existing methodologies. Currently, a limiting factor for a correct root density estimation is the root water content which, if too low, can lead to an underestimation of root biomass (Guo et al. 2013).
In conclusion, all the above-mentioned NDT methods have proven viability in the assessment of tree root systems. However, the knowledge of the application of some of these techniques in tree assessment is still in its infancy. Moreover, their employment can be troublesome, as the required equipment is often difficult to operate. In addition, the application of these methods can often be very expensive. On the other hand, GPR is gaining attention in view of the high versatility, the rapidity of its data collection and the provision of reliable results at relatively limited costs. It has also proven to be a reliable instrument for the assessment of tree root systems. The advantages and limitations of the aforementioned ND techniques in the assessment of tree root systems are summarised in Table 2.
6 New Methodological and Data Processing Prospects for the Assessment of Tree Root Systems Architecture Using Ground Penetrating Radar: A Case Study
Recent advances in tree root mapping using GPR have led to the reconstruction of root system geometry using correlation analysis in the 3D domain (Alani et al. 2018). In this study, two trees of different species, fir and oak, were investigated using circular and semicircular scanning configurations, in order to test the viability of a novel technique for the creation of a three-dimensional root system model.
This study was further developed by Lantini et al. (2018), with the aim of assessing interactions between different tree root systems. Interconnections between different root systems allow the transmission of pathogenic diseases and fungi. Research into how these roots interact with each other and with the surrounding environment is essential for the achievement of effective containment practices. To achieve this aim, this pilot research study focused on the estimate of root mass density, and this objective was addressed by evaluating the total root length per reference unit. Promising results were obtained, demonstrating that local increases in density occur in the area where interconnections are supposed to happen.
Further research, which includes advanced signal processing, is now under development, with the aim of reducing uncertainty and false alarms in root detection. To this extent, a case study is presented, in which a dedicated data processing methodology, based on three main chronological stages, is applied to GPR data. An improved pre-processing algorithm is proposed, with the aim of reducing clutter in raw GPR data, improve target detection and increase deeper reflections which are likely to be related to deep root systems but have been attenuated due to increasing depths or highly conductive materials. Furthermore, advanced signal processing techniques are applied, in an effort to remove ringing noise from GPR data and focus on the response from the target. Subsequently, an iterative procedure for tree root recognition and tracking and root system architecture reconstruction in a 3D domain is implemented, based on a correlation analysis between identified targets. Lastly, the domain is divided into reference volume units and root density maps are produced. This approach has given promising results, proving that GPR has the potential to identify both the shallow (within the first 25 cm of soil) and the deep (more than 25 cm from the soil surface) root systems, and find viable root paths, allowing for the construction of three-dimensional models of root systems for different species of trees.
6.1 Materials and Methods
6.1.1 The Survey Technique
The survey was carried out in Walpole Park, Ealing, London (UK). The soil around a mature tree (trunk circumference at ground level of 3.83 m and radius of 0.61 m) was investigated (Fig. 18). Twenty-four circular scans were performed on the soil around the tree trunk, starting 0.50 m from the bark and then 0.30 m apart from one another. Thus, an overall area of 197.69 m2 was examined.

The investigated area
6.1.2 The GPR Equipment
The survey was performed using a ground-coupled GPR system [Opera Duo, IDS GeoRadar (Part of Hexagon)], equipped with 700 MHz and 250 MHz central frequency antennas (Fig. 19). Data acquisition was performed using a time window of 80 ns and 512 samples. The horizontal resolution was set to 3.2 × 10−2 m. For this study, only data from the 700-MHz frequency antenna were analysed, as these provide the highest effective resolution (Benedetto et al. 2011; Benedetto 2013).

Opera Duo GPR system [IDS GeoRadar (Part of Hexagon)]
6.1.3 Signal Processing Methodology
As previously stated, the data processing methodology is divided into three main stages. A pre-processing stage was envisaged, aiming to eliminate clutter-related signal and increase the signal-to-noise ratio (SNR). For this purpose, advanced signal processing techniques were implemented. Moreover, in order to achieve information about the architecture of the entire tree root system, reflections from deeply localised targets were amplified.
6.1.3.1 Pre-processing Stage
The need for a pre-processing stage arises from the fact that raw GPR data are often corrupted by clutter. This can make the data interpretation difficult, as the response from the real targets can be disguised. In order to ensure the widest possible applicability of the proposed methodology, basic signal processing techniques were considered. Thus, a sequential use of (a) zero-offset removal, (b) zero correction, (c) bandpass filtering and (d) time-varying gain was performed.
Nevertheless, the application of the aforementioned techniques does not help with the removal of ringing noise, which is a repetitive type of clutter and can appear as horizontal and periodic events. When present, ringing noise can conceal the real target of the investigation, with resulting misinterpretation of results. One of the most effective techniques for ringing noise removal, the singular value decomposition (SVD), was therefore implemented in this stage.
The concept behind the SVD filter is that a GPR image can be divided into several subimages (eigenimages), each of which contains some of the information relating to the original image. Since components such as ringing noise are highly correlated, it is possible to separate their response from the one given by the real target of the investigation, thus eliminating the clutter to enhance the SNR.
Another important advancement in the signal processing stage arises from the need to have information on the real position of the target. As previously stated, the response from a target in a GPR survey is given by a reflection hyperbola, the apex of which corresponds to the position of the buried object. This concept is acceptable for a simple location of a target. However, automatic mapping of a tree root system architecture in a 3D domain requires the target to be concentrated in a single point. This will avoid false alarms for root identification. To this effect, a frequency–wavenumber (F–K) migration was applied to GPR data, assuming a constant velocity of the medium and estimating it through an iterative procedure. This allows us to find the permittivity value that best fit the data.
6.1.3.2 Tree Root Tracking Algorithm
The implementation of the algorithm for the automatic reconstruction of the tree root system geometry consists of two main parts. In the first part, the main settings, based on fundamental set up hypotheses, are defined (i.e. the outcomes of the previous pre-processing phase, matrix dimensions and GPR data acquisition settings). In addition, other important variables (i.e. the data acquisition method and the dielectric properties of the medium) are initialised.
Subsequently, the pre-processed GPR data undergo an iterative procedure, in order to find a correlation between the amplitude values in different positions of the 3D domain. The steps of the procedure are the following:
Detection of the target: each amplitude value in the data matrix is compared with a predefined threshold value, in order to identify the reflections that are more likely to belong to tree roots.
Correlation analysis: a spatial correlation analysis is carried out between the identified reflections.
Root tracking: where a correlation is found, targets are assembled into vectors which represent the spatial coordinates of the identified root.
Reconstruction of root system architecture in the 3-D domain: all the vectors are positioned in a 3D environment, based on the previously identified coordinates, to recreate a rendering of the tree root system.
6.1.3.3 Root Density Evaluation
In this final step, root density is evaluated based on the position and length of the roots obtained in the previous phase. Through the application of a polynomial fitting function, the roots’ path was better approximated in a continuous domain, thus allowing for the estimation of the length of each root. Based on this, the volume in which the tree root system resides was divided into reference volumes, and the length of the roots enclosed in each volume was evaluated as follows:
where d is the density (m/m3), n is the number of roots contained in a reference unit of volume (m3) and Li is the length of the root (m).
6.1.4 Results and Discussion
The advances made here to the GPR data pre-processing phase have allowed a more effective identification of the tree roots, significantly reducing the margin of error. In fact, they made it possible to remove horizontal layers and repeated reflections given by ringing noise through the application of the SVD filter. Figure 20 shows an example of B-scan before (a) and after (b) the application of the SVD filter, from the analysis of which it is clear that the effect of noise-related features is considerably mitigated.

B-scan before (a) and after (b) the application of the SVD filter
Moreover, the application of F–K migration significantly improved the effectiveness of the subsequent phases of the algorithm, as the margin of error in identifying the true position of the roots was significantly reduced. In fact, the tails of the hyperbole made accurate target detection difficult, as not infrequently points far from the apices (i.e. the real location of the target) were higher than the set threshold. Thus, the migration process increased the reliability of the subsequent steps. Figure 21 shows a comparison between a B-scan before (a) and after (b) the application of the F–K migration. It is evident how the hyperbolic response of the targets has become a single focused point, which corresponds to the target’s real position.

B-scan before (a) and after (b) the application of F–K migration
Subsequently, the application of the root tracking algorithm to the processed data allowed for the reconstruction of the tree root system architecture in a three-dimensional environment. Figure 22 shows the result of this procedure in a 2D planar view (a) and in a 3D environment (b). To make interpreting the results easier, shallow-buried roots (i.e. within the first 25 cm of soil) have been represented with a different colour than deeper roots.

2D planar view (a) and 3D rendering (b) of the investigated root system
Results have proven the potential of the algorithm in identifying consistent root paths. Points belonging to the roots were successfully identified and linked together, based on a spatial correlation analysis. From the analysis of B-scans, the strongest reflections resulted to be located within the first 80 cm of soil. Nevertheless, the application of the time-varying gain function allowed the detection of deeper targets, up to a maximum depth of 1.20 m. This result is in line with what was expected, as generally tree root systems develop in the first 2 m of subsoil, with the 90% to the 99% of roots occurring in the first metre (Crow 2005).
As depicted in Fig. 22, root discontinuity is visible in certain areas. Possible explanations for this could be:
Presence of a higher moisture content (Ortuani et al. 2013) or a high concentration of clay in certain areas of subsoil (Patriarca et al. 2013; Tosti et al. 2016).
Propagation of tree roots vertically downwards within the soil matrix
Furthermore, in order to avoid the inclusion of non-root targets within the soil (cobbles and utility futures), the algorithm is programmed to discard shorter roots.
The architecture of the root system was then further investigated through the evaluation of root density at different depths, using the proposed equation (Eq. 6). The domain investigated was divided into reference volumes of 0.3 m × 0.3 m × 0.1 m and thus analysed to determine the total root length per reference unit. Figure 23 presents the outcomes of this data processing stage. Several areas with a high density of roots can be identified, as shown in Table 3.

GPR-derived root density maps, related to the following depths: a from 0 to 0.10 m; b from 0.10 to 0.20 m; c from 0.20 to 0.30 m; d from 0.30 to 0.40 m; e from 0.40 to 0.50 m; f from 0.50 to 0.60 m; g from 0.60 to 0.70 m; h from 0.70 to 0.80 m; i from 0.80 to 0.90 m; j from 0.90 to 1.00 m; k from 1.00 to 1.10 m; l from 1.10 to 1.20 m
From the analysis of the results, it can be noticed that there is a high density of roots in the south-west quadrant, at a depth between 0.10 and 1.10 m. This result could be due to the peculiar location of the investigated tree in the park. In fact, the tree is confined to the north by the presence of a pathway, which requires a higher compaction level than the undisturbed soil. Moreover, root development is not limited to the south-west direction, as there are no other trees which could compete for the exploitation of soil resources. Nevertheless, we can note the presence of areas of high root density in the east direction, between 0.30 and 0.50 m deep and at a great distance from the trunk. This could be due to the close proximity of another tree, whose roots are interconnected with the ones of the investigated system. In fact, in that direction root density gradually decreases, to then increase again towards the limit of the surveyed area, bordering the area potentially affected by the roots of the adjacent tree. Such an outcome is in line with the results provided by Lantini et al. (2018).
The evaluation of tree root density in soil has therefore proven to be an effective tool for the assessment of the root system conditions. Variations in time of root density, obtained by repeating GPR tests at appropriate intervals, could help in the assessment of the root system health. In fact, sudden reductions in root density could be due to the occurrence of diseases or fungal attacks. Thus, acknowledging the problem at its early stage could allow the application of appropriate remedial actions, in order to save the tree and prevent infection from spreading to other trees.
7 Conclusion
In this review paper, the authors have presented a significant proportion of the existing literature within the subject area of assessment and monitoring of tree roots and their interactions with the soil. The nature of tree root systems, their architecture and the factors affecting their development have been covered. Emphasis was placed upon the reasons behind the increasing importance of assessment and health monitoring of tree roots and their relationship with the health of trees.
The major destructive methods for tree root detection and mapping were highlighted, followed by a section presenting a summary of the main non-destructive testing methods and the research outputs based on their application for tree root system evaluation. The paper also clearly demonstrated that the investigation of tree root systems using non-destructive testing (NDT) methods is effective and is gaining momentum. As the awareness of the importance of the world’s natural heritage is growing, hopefully more desperately needed research and development work will be carried out and efforts will be devoted to this vitally important area of endeavour.
Due to its ease of use, its non-intrusive nature and its relatively low costs, ground penetrating radar (GPR) was found to be one of the most reliable tools for root inspection. Recent research has focused on root detection and three-dimensional mapping of tree root systems architecture and root diameter, and the evaluation of root diameter in complex urban areas. New research is now focusing on tree root and soil interactions, as well as the interconnectivity of tree roots with one another. Furthermore, it is important to report that the authors are currently engaged with research involving novel survey methodologies and data acquisition techniques which in turn have been applied in assessing a variety of tree species. Promising results have been obtained within the context of tree roots variations as well as the soil characterisations.
Advancements in GPR signal processing for tree root assessment and mapping are also under development. To that effect, a case study was presented, focusing on the removal of noise-related information for an improved automatic recognition and mapping of tree roots in a 3D environment.
Regarding the assessment of the root mass density, it is important to conclude that, at the present time, existing assessment methods are unable to provide accurate estimations. As has been pointed out earlier, the importance of assessing tree root density is vital for several purposes, ranging from the health of the tree to the safety of the surrounding environment (including buildings and infrastructure). It was noted that a definitive approach is difficult to achieve, as the estimation of root density is an indirect output of the compiled GPR data. Within this framework, the authors have proposed a new emerging approach, based on the evaluation of a novel root density index. Root density is evaluated based on the position and length of the roots, as it is obtained from the modelling phase of the root mapping algorithm. Results have given encouraging outcomes, showing that a more reliable estimation of tree root density can be achieved. More research is now under development, in order to demonstrate the viability of the proposed algorithm. To this extent, tests on several species of trees, using different antenna systems (frequencies and type) and survey conditions, are under development.
References
Alani AM et al (2018) Mapping the root system of matured trees using ground penetrating radar. In: IEEE, pp 1–6
Alani AM, Tosti F (2018) GPR applications in structural detailing of a major tunnel using different frequency antenna systems. Constr Build Mater 158:1111–1122
Alani AM, Aboutalebi M, Kilic G (2013) Applications of ground penetrating radar (GPR) in bridge deck monitoring and assessment. J Appl Geophys 97:45–54
Amato M, Ritchie JT (2002) Spatial distribution of roots and water uptake of maize (Zea mays L.) as affected by soil structure. Crop Sci 42:773–780
Amato M et al (2008) In situ detection of tree root distribution and biomass by multi-electrode resistivity imaging. Tree Physiol 28:1441–1448
Amato A et al (2009) Multi-electrode 3D resistivity imaging of alfalfa root zone. Eur J Agron 31:213–222
Anagnostakis SL (1987) Chestnut blight: the classical problem of an introduced pathogen. Mycologia 79(1):23–37
Attia al Hagrey SA (2007) Geophysical imaging of root-zone, trunk, and moisture heterogeneity. J Exp Bot 58:839–854
Aukema JE et al (2011) Economic impacts of non-native forest insects in the continental United States. PLoS ONE 6(9):e24587
Aulen M, Shipley B (2012) Non-destructive estimation of root mass using electrical capacitance on ten herbaceous species. Plant Soil 355(1–2):41–49
Barker PA (1983) Some urban trees of California: maintenance problems and genetic improvement possibilities. In METRIA: 4. Proceedings of the fourth Biennial conference of the metropolitan tree improvement alliance, pp 47–54
Barton CVM, Montagu KD (2004) Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions. Tree Physiol 24:1323–1331
Basso B et al (2010) Two-dimensional spatial and temporal variation of soil physical properties in tillage systems using electrical resistivity tomography. Agron J 102:440–449
Bassuk N, Grabosky J, Mucciardi A, Raffel G (2011) Ground-penetrating radar accurately locates tree roots in two soil media under pavement. Arboric Urban For 37:160–166
Benedetto A et al (2013) Soil moisture mapping using GPR for pavement applications. In: IWAGPR 2013—proceedings of the 2013 7th international workshop on advanced ground penetrating radar
Benedetto A, Tosti F, Schettini G, Twizere C (2011) Evaluation of geotechnical stability of road using GPR. In: 2011 6th International workshop on advanced ground penetrating radar (IWAGPR 2011)
Benedetto A et al (2015) Mapping the spatial variation of soil moisture at the large scale using GPR for pavement applications. Near Surf Geophys 13(3):269–278
Benedetto A et al (2017a) Railway ballast condition assessment using ground-penetrating radar—an experimental, numerical simulation and modelling development. Constr Build Mater 140:508–520
Benedetto A, Tosti F, Bianchini Ciampoli L, D’Amico F (2017b) An overview of ground-penetrating radar signal processing techniques for road inspections. Sig Process 132:201–209
Besson A et al (2004) Structural heterogeneity of the soil tilled layer as characterized by 2D electrical resistivity surveying. Soil Tillage Res 79:239–249
Bianchini Ciampoli L, Tosti F, Economou N, Benedetto F (2019) Signal processing of GPR data for road surveys. Geosciences 9:96
Biddle G (2001) Tree root damage to buildings. In: Vipulanandan C, Addison MB, Hasen M (eds) Expansive clay soils and vegetative influence on shallow foundations. American Society of Civil Engineers, Reston, pp 1–23
Birouste M et al (2014) Measurement of fine root tissue density: a comparison of three methods reveals the potential of root dry matter content. Plant Soil 374(1–2):299–313
Blunt SM (2008) Trees and pavements—are they compatible? Arboric J 31:73–80
Bohm W (2012) Methods of studying root systems. Springer, Berlin
Bonan GB (1992) Soil temperature as an ecological factor in boreal for ests. In: Shugart HH, Leemans R, Bonan GB (eds) A systems analysis of the global boreal forest. Cambridge University Press, Cambridge, pp 126–143
Borden KA et al (2014) Estimating coarse root biomass with ground penetrating radar in a tree-based intercropping system. Agrofor Syst 88(4):657–669
Boyer JS (1995) Roots and root systems. In: Kramer PJ, Boyer JS (eds) Water relations of plants and soils. Academic Press Inc, New York
Brennan G, Patch D, Stevens FRW (1997) Tree roots and underground pipes—arboriculture research note. Arboricultural Advisory and Information Service, Farnham
Brudi E, Wassenaer P (2002) Trees and statics: non-destructive failure analysis. International Society of Arboriculture, Champaign, pp 53–70
Bucur V (2006) Acoustics of wood. Springer, Berlin
Butnor JR et al (2001) Use of ground-penetrating radar to study tree roots in the southeastern United States. Tree Physiol 21:1269–1278
Butnor JR et al (2003) Utility of ground-penetrating radar as a root biomass survey tool in forest systems. Soil Sci Soc Am J 67:1607–1615
Butnor JR et al (2008) Using ground-penetrating radar to estimate tree root mass comparing results from two Florida Surveys. In: Allred BJ, Daniels JJ, Ehsami MR (eds) Handbook of agricultural geophysics. CRC Press, Boca Raton, pp 375–382
Buza AK, Divos F (2016) Root stability evaluation with non-destructive techniques. Acta Silv Lignaria Hung 12:125–134
Buza AK, Goncz B (2015) Comparison of trees and NDT methods. Wood Res 60:45–58
Canadian Forest Service (2015) Trees, insects and diseases of Canada’s forests—Natural Resources Canada (online). https://tidcf.nrcan.gc.ca/en/diseases/factsheet/16. Accessed 10 Jan 2019
Caneva G, Ceschin S, De Marco G (2006) Mapping the risk of damage from tree roots for the conservation of archaeological sites: the case of the Domus Aurea, Rome. Conserv Manag Archaeol Sites 7:163–170
Caneva G, Galotta G, Cancellieri L, Savo V (2009) Tree roots and damages in the Jewish catacombs of Villa Torlonia (Roma). J Cult Herit 10:53–62
Cermak J, Hruska J, Martinkova M, Prax A (2000) Urban tree root systems and their survival near houses analyzed using ground penetrating radar and sap flow techniques. Plant Soil 219:103–116
Conyers LB (2002) Ground penetrating radar. In: Hornak JP (ed) Encyclopedia of imaging science and technology. Wiley, Hoboken
Costello LR, Jones KS (2003) Reducing infrastructure damage by tree roots: a compendium of strategies. Western Chapter of the International Society of Arboriculture (WCISA), Cohasset
Coutts MP (1983) Root architecture and tree stability. Plant Soil 71:171–188
Crow P (2005) The influence of soils and species on tree root depth. Forestry Commission, Edinburgh
Cui XH et al (2011) Modeling tree root diameter and biomass by ground-penetrating radar. Sci China Earth Sci 54(5):711–719
Cutler D, Richardson IBK (1981) Tree roots and buildings. Construction Press, London
Daniels DJ (1996) Surface-penetrating radar. Electron Commun Eng J 8:165–182
Daniels DJ (2004) Ground penetrating radar. IET, London
Day RW (1991) Damage of structures due to tree roots. J Perform Constr Facil 5:200–207
Divos F, Bejo L, Toth A (2009) Instrument supported tree evaluation in Hungary. Beijing Forestry University, Beijing, pp 71–76
Driscoll R (1983) The influence of vegetation on the swelling and shrinking of clay soils in Britain. Geotechnique 33:93–105
Eshel A, Beeckman T (2013) Plant roots: the hidden half, 3rd edn. Marcel Dekker, New York
Fay N (2014) Appraisal of trees at Walpole Park. Internal Report. Ealing Council, London
Francis JK, Parresol BR, de Patino JM (1996) Probability of damage to sidewalks and curbs by street trees in the tropics. J Arboric 22:1996
Gibbs JN (1978) Intercontinental epidemiology of Dutch elm disease. Annu Rev Phytopathol 16(1):287–307
Goodman D (1994) Ground-penetrating radar simulation in engineering and archaeology. Geophysics 2:224–232
Grabianowski M, Manley B, Walker JCF (2006) Acoustic measurements on standing trees, logs and green lumber. Wood Sci Technol 40(3):205–216
Grabosky J, Bassuk N, Irwin L, Van Es H (1998) Pilot field study of structural soil materials in pavement profiles. International Society of Arboriculture, Champaign, pp 210–221
Grabosky J, Haffner E, Bassuk N (2009) Plant available moisture in stone-soil media for use under pavement while allowing urban tree root growth. Arboric Urban For 35(5):271–278
Gregory PJ (2006) Plant roots: growth, activity and interaction with soils. Blackwell Publishing, Hoboken
Gregory PJ et al (2003) Non-invasive imaging of roots with high resolution X-ray micro-tomography. In: Abe JJ (ed) Roots: the dynamic interface between plants and the Earth. Springer, Dordrecht, pp 351–359
Guo L et al (2013) Application of ground penetrating radar for coarse root detection and quantification: a review. Plant Soil 362:1–23
Hansen EM, Goheen EM (2000) Phellinus weirii and other native root pathogens as determinants of forest structure and process in western North America. Annu Rev Phytopathol 38(1):515–539
Hargreaves CE, Gregory PJ, Bengough AG (2009) Measuring root traits in barley (Hordeum vulgare ssp. vulgare and ssp. spontaneum) seedlings using gel chambers, soil sacs and X-ray microtomography. Plant Soil 316(1-2):285–297
Heeraman DA, Juma NG (1993) A comparison of minirhizotron, core and monolith methods for quantifying barley (Hordeum vulgare L.) and fababean (Vicia faba L.) root distribution. Plant Soil 148:29–41
Heeraman DA, Hopmans JW, Clausnitzer V (1997) Three dimensional imaging of plant roots in situ with X-ray computed tomography. Plant Soil 189(2):167–179
Henwood K (1973) A structural model of forces in buttressed tropical rain forest trees. Biotropica 5:83–89
Hruska J, Cermak J, Sustek S (1999) Mapping tree root systems with ground-penetrating radar. Tree Physiol 19:125–130
Huisman J, Hubbard S, Redman J, Annan AP (2003) Measuring soil water content with ground penetrating radar: a review. Vadose Zone J 2(4):476–491
Innes JL (1993) Forest health: its assessment and status. CAB International, Wallingford
Iwase J et al (2015) Non-invasive acoustic sensing of belowground wooden tissues: possible applications to spatial mapping of soil usage by tree roots. Environ Control Biol 53(3):175–179
Jackson RB et al (1996) A global analysis of root distributions for terrestrial biomes. Oecologia 108:389–411
Jol HM (ed) (2008) Ground penetrating radar theory and applications. Elsevier, Amsterdam
Kaestner A, Schneebeli M, Graf F (2006) Visualizing three-dimensional root networks using computed tomography. Geoderma 136(1–2):459–469
Kearey P, Brooks M, Hill I (2013) An introduction to geophysical exploration. Wiley, Hoboken
Kopinga J (1994) Aspects of the damage to asphalt road pavings caused by tree roots. International Society of Arboriculture, Savoy, pp 165–178
Krainyukov A, Lyaksa I (2016) Detection of tree roots in an urban area with the use of ground penetrating radar. Transp Telecommun 17:362–370
Lambot S, Javaux M, Hupet F, Vanclooster M (2002) A global multilevel coordinate search procedure for estimating the unsaturated soil hydraulic properties. Water Resour Res 38(11):6–15
Lantini L et al (2018) Use of ground penetrating radar for assessing interconnections between root systems of different matured tree species. IEEE, Cassino
Leskovar DI, Cantliffe DJ, Stoffella PJ (1994) Transplant production systems influence growth and yield of fresh-market tomatoes. J Am Soc Hortic Sci 119(4):662–668
Liebhold AM et al (2012) Live plant imports: the major pathway for forest insect and pathogen invasions of the US. Front Ecol Environ 10(3):135–143
Lindsey P, Barlow L (1994) The design of structural soil mixes for trees in urban areas. Coorperative Extension Department of Environmental Horti-culture, UC Davis, CA
Loh FCW, Grabosky J, Bassuk N (2003) Growth response of Ficus benjamina to limited soil volume and soil dilution in a skeletal soil container study. Urban For Urban Green 2:53–62
Loizos A, Plati C (2007) Accuracy of ground penetrating radar horn-antenna technique for sensing pavement subsurface. IEEE Sens J 7(5):842–850
Loperte A et al (2006) 2D and 3D high resolution geoelectrical tomography for non-destructive determination of the spatial variability of plant root distribution: laboratory experiments and field measurements. Geophys Res Abstr 8:06749
Lorenzo H, Pérez-Gracia V, Novo A, Armesto J (2010) Forestry applications of ground-penetrating radar. For Syst 19:5–17
Lucke T, Johnson T, Beecham S, Cameron D, Moore G (2011) Using permeable pavements to promote street tree health, to minimize pavement damage and to reduce stormwater flows. In 12th International conference on Urban drainage, pp 11–16
Lundström T, Jonsson MJ, Kalberer M (2007) The root–soil system of Norway spruce subjected to turning moment: resistance as a function of rotation. Plant Soil 300(1–2):35–49
MacLeod RD, Cram JW (1996) Forces exerted by tree roots. Arboriculture Research and Information Note-Department of the Environment, Farnham
Mahesh M (2002) The AAPM/RSNA physics tutorial for residents: search for isotropic resolution in CT from conventional through multiple-row detector. Radiographics 22(4):949–962
Majdi H (1996) Root sampling methods–applications and limitations of the minirhizotron. Plant Soil 185:255–258
Majdi H et al (2005) Measuring fine root turnover in forest ecosystems. Plant Soil 276:1–8
Marchi L et al (2018) State of the art on the use of trees as supports and anchors in forest operations. Forests 9(8):467
McPherson EG, Peper P (2000) Costs due to conflicts between street tree root growth and hardscape. Western Chapter (International Society of Arboriculture), Cohasset, pp 15–18
Mooney SJ, Pridmore TP, Helliwell J, Bennet MJ (2012) Developing X-ray computed tomography to non-invasively image 3-D root systems architecture in soil. Plant Soil 352:1–22
Mullaney J, Lucke T, Trueman SJ (2015) A review of benefits and challenges in growing street trees in paved urban enviroments. Landsc Urban Plan 134:157–166
Neumann G, George TS, Plassard C (2009) Strategies and methods for studying the rhizosphere—the plant science toolbox. Plant Soil 321(1–2):431–456
Nicoll BC, Armstrong A (1998) Development of Prunus root systems in a city street: pavement damage and root architecture. Arboric J 22:259–270
Nobel PS (2003) Environmental biology of agaves and cacti. Cambridge University Press, Cambridge
Ortuani B, Benedetto A, Giudicic M, Mele M, Tosti F (2013) A non-invasive approach to monitor variability of soil water content with electromagnetic methods. Procedia Environ Sci 19:446–455
Ow LF, Sim EK (2012) Detection of urban tree roots with the ground penetrating radar. Plant Biosyst 146:288–297
Pallardy SG (2008) Physiology of woody plants. Academic Press, Cambridge
Panissod C, Michot D, Benderitter Y, Tabbagh A (2001) On the effectiveness of 2D electrical inversion results: an agricultural case study. Geophys Prospect 49:570–576
Patriarca C, Tosti F, Velds C, Benedetto A, Lambot S, Evert S (2013) Frequency dependent electric properties of homogeneous multi-phase lossy media in the ground-penetrating radar frequency range. J Appl Geophys 97:81–88
Perret JS, Al-Belushi ME, Deadman M (2007) Non-destructive visualization and quantification of roots using computed tomography. Soil Biol Biochem 39(2):391–399
Pokorny JD et al (2003) Urban tree risk management: a community guide to program design and implementation. USDA, Washington
Potin D, Duflos E, Vanheeghe P (2006) Landmines ground-penetrating radar signal enhancement by digital filtering. IEEE Trans Geosci Remote Sens 44:2393–2406
Randrup TB, McPherson EG, Costello LR (2001a) A review of tree root conflicts with sidewalks, curbs, and roads. Urban Ecosyst 5:209–225
Randrup TB, McPherson EG, Costello LR (2001b) Tree root intrusion in sewer systems: review of extent and costs. J Infrastruct Syst 7:26–31
Richardson DM et al (2001) Naturalization and invasion of alien plants: concepts and definitions. Divers Distrib 6(2):93–107
Rishbeth J (1972) Resistance to fungal pathogens of tree roots. Proc R Soc Lond B 181(1064):333–351
Roberts J, Jackson N, Smith M (2006) Tree roots in the built environment. Lancaster, Centre for Ecology and Hydrology
Samouelian A et al (2005) Electrical resistivity survey in soil science: a review. Soil Tillage Res 83:173–193
Samuelson LJ et al (2008) Growth and physiology of loblolly pine in response to long-term resource management: defining growth potential in the southern United States. Can J For Res 38(4):721–732
Santini A et al (2012) Biogeographical patterns and determinants of invasion by forest pathogens in Europe. New Phytol 197:238–250
Satriani A, Loperte A, Proto M, Bavusi M (2010) Building damage caused by tree roots: laboratory experiments of GPR and ERT surveys. Adv Geosci 24:133–137
Schrock BJ (1994) Existing sewer evaluation and rehabilitation. American Society of Civil Engineers, Reston
Schuurman JJ, Goedewaagen MAJ (1965) Methods for the examination of root systems and roots. Centre for Agricultural Publications and Documentation, Wageningen
Shainsky LJ, Radosevich SR (1992) Mechanisms of competition between Douglas-fir and red alder seedlings. Ecology 73:30–45
Smit AL et al (2013) Root methods: a handbook. Springer, Berlin
Stoke A (1994) Response of young trees to wind: effects on root architecture and anchorage strength. University of York, York
Stokes A et al (2002) An evaluation of different methods to investigate root system architecture of urban trees in situ: I. Ground-penetrating radar. J Arboric 28:2–10
Stone EL, Kalisz PJ (1991) On the maximum extent of tree roots. For Ecol Manage 46:59–102
Stover DB, Day FP, Butnor JR, Drake BG (2007) Effect of elevated CO2 on coarse-root biomass in Florida scrub detected by ground-penetrating radar. Ecology 88(5):1328–1334
Strong WL, La Roi GH (1983) Root-system morphology of common boreal forest trees in Alberta, Canada. Can J For Res 13:1164–1173
Sullivan RH, Gemmell RS, Schafer LA, Hurst WD (1977) Economic analysis, root control, and backwater flow control as related to infiltration/inflow control. US Environmental Protection Agency, Cincinnati
Sustek S, Hruska J, Druckmuller M, Michalek T (1999) Root surfaces in the large oak tree estimated by image analysis of the map obtained by the ground penetrating radar. J For Sci 45:139–143
Taylor HM, Upchurch DR, Brown JM, Rogers HH (1991) Some methods of root investigations. In: McMichael BL, Persson H (eds) Developments in agricultural and managed forest ecology. Elsevier, Amsterdam, pp 553–564
Tosti F, Pajewski L (2015) Applications of radar systems in planetary sciences: an overview. In: Benedetto A, Pajewski L (eds) Civil engineering applications of ground penetrating radar. Springer transactions in civil and environmental engineering. Springer, Berlin, pp 361–371
Tosti F, Benedetto A, Bianchini Ciampoli L, Lambot S, Patriarca C, Slob EC (2016) GPR analysis of clayey soil behaviour in unsaturated conditions for pavement engineering and geoscience applications. Near Surf Geophys 14(2):127–144
Tosti F, Bianchini Ciampoli L, Brancadoro MG, Alani AM (2018a) GPR applications in mapping the subsurface root system of street trees with road safety-critical implications. Adv Transp Stud 44:107–118
Tosti F et al (2018b) An experimental-based model for the assessment of the mechanical properties of road pavements using ground-penetrating radar. Constr Build Mater 165:966–974
Tracy SR et al (2010) The X-factor: visualizing undisturbed root architecture in soils using X-ray computed tomography. J Exp Bot 61(2):311–313
Tracy SR, Black CR, Roberts JA, Mooney SJ (2011) Soil compaction: a review of past and present techniques for investigating effects on root growth. J Sci Food Agric 91:1528–1537
Trowbridge PJ, Bassuk NL (2004) Trees in the urban landscape: site assessment, design, and installation. Wiley, Hoboken
Tubbs CH (1977) Root-crown relations of young sugar maple and yellow birch. Research Note NC-225. St. Paul, MN: US Dept. of Agriculture, Forest Service, North Central Forest Experiment Station, p 225
Wagar JA, Barker PA (1983) Tree root damage to sidewalks and curbs. J Arboric 9:177–181
Wagar JA, Franklin AL (1994) Sidewalk effects on soil moisture and temperature. J Arboric 20:237–238
Wang Z et al (2006) Fine root architecture, morphology, and biomass of different branch orders of two Chinese temperate tree species. Plant Soil 288:155–171
Wang X, Allison RB, Wang L, Ross RJ (2007) Acoustic tomography for decay detection in red oak trees. United States Department of Agriculture, Madison
Weaver JE, Voigt J (1950) Monolith method of root-sampling in studies on succession and degeneration. Agron Hortic Faculty Publ 111:286–299
Wielopolski L, Hendrey G, Daniels J, McGuigan M (2000) Imaging tree root systems in situ, pp 642–646
Wildenschild D et al (2002) Using X-ray computed tomography in hydrology: systems, resolutions, and limitations. J Hydrol 267:285–297
Williams RE, Shaw CG, Wargo PM, Sites WH (1986) Armillaria root disease. US Department of Agriculture, Forest Service, Washington
Wilson BF (1964) Structure and growth of woody roots of Acer rubrum L. Harvard University, Harvard Forest, St. Petersham
Zenone T et al (2008) Preliminary use of ground-penetrating radar and electrical resistivity tomography to study tree roots in pine forests and poplar plantations. Funct Plant Biol 35:1047–1058
Acknowledgements
This paper is dedicated to the memory of Jonathan West; a friend, a colleague, a forester, a conservationist and an environmentalist, who died following an accident in the woodland that he loved. We would like to thank The Lord Faringdon Charitable Trust and The Schroder Foundation for supporting this project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Alani, A.M., Lantini, L. Recent Advances in Tree Root Mapping and Assessment Using Non-destructive Testing Methods: A Focus on Ground Penetrating Radar. Surv Geophys 41, 605–646 (2020). https://doi.org/10.1007/s10712-019-09548-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10712-019-09548-6