
Abstract
This paper mainly investigates the finite-time projective synchronization problem of memristor-based delay fractional-order neural networks (MDFNNs). By using the definition of finite-time projective synchronization, combined with the memristor model, set-valued map and differential inclusion theory, Gronwall–Bellman integral inequality and Volterra-integral equation, the finite-time projective of MDFNNs is achieved via the linear feedback controller. Novel sufficient conditions are obtained to guarantee the finite-time projective synchronization of the drive-response MDFNNs. Besides, we also analyze the feasible region of the settling time. Finally, two numerical examples are given to show the effectiveness of the proposed results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The memristor is a new basic circuit element between charge and flux linkage proposed by Chua based on symmetry theory in 1971 [27]. In 2008, researchers at the HP laboratories created the memristor for the first time [43]. The most important difference between the memristor and the traditional resistance is that the resistance is dependent on the charge passing through it; therefore, it constantly changes its properties when an external signal passes. The memristor has a memory and can change information encoded by its resistance state. From this sense, the memristor is similar to the synapse of neurons in the brain. Scientists believe that the memristor is able to help us mimic a true neural network because of the freezing memory property [47]. So the memristor-based neural networks have attracted a lot of attention. More and more researchers build the memristor-based neural networks for a variety of application research, such as memristor-based neural networks modeling [3, 22, 34, 56, 57], data clustering using memristor networks [13], real-time encoding and compression [21], memristor-based associative memory neural networks [17, 23], optimization and massively parallel computing [37, 38], and machine learning [10].
Since German mathematician Leibniz discussed the concept of fractional calculus in 1695, fractional calculus has occupied the great mathematicians’ time and has been studied for several centuries. The fractional calculus can be described as an extension of a derivative operator from integer order to arbitrary order. The fractional calculus equation is very suitable for characterizing materials and processes with memory and hereditary properties, and it has become one of the important tools in the mathematical modeling of the complex mechanical and physical processes. The study results show that the fractional-order differential systems can better model some natural phenomena. In fact, the chaotic behavior has been found in some fractional-order dynamical systems, such as fractional-order Lorenz system [20], fractional-order R\(\ddot{o}\)ssler system [15], fractional-order Chen system [52], and so on. The above systems show chaotic behavior when the fractional order is less than 1. The discovery of this phenomenon makes researchers begin to pay attention to the synchronization and control of the neural networks when the nodes are fractional-order differential systems. Because of the unique advantages of fractional calculus, it has been widely used in viscoelastic materials [2, 42], biology [30], molecular diffusion theory [26, 32], seismic analysis [25, 54], image processing [19], and control systems [9, 29, 39, 51, 59], etc. For example, Ref. [51] discussed chaos synchronization of fractional chaotic maps by applying the fractional difference based on the stability condition, and find that the chaotic signals studied in this paper are more sensitive because they are affected by both the initial values and the varied discretization time. With the emergence of memristor in recent years, the memristor-based fractional-order neural networks have been paid more and more attention, especially the study on stability and synchronization [4, 14, 28, 41, 48, 58]. For example, Ma et al. [28] investigated the dynamical behavior composed memristor and improved R\(\ddot{o}\)ssler oscillator and found both the nonlinear cross-terms and initial selection and resetting can be effective to control chaotic systems. This property can enhance the security of secure communication. Therefore, it is very valuable and practical to study memristor-based fractional-order neural networks.
Because of the limited speed of signal transmission between the neurons, the viscosity of synapses triggered by biological neural networks, and the finite switching speed between different circuit elements in hardware implementations of neural networks, time delay is a common phenomenon in neural networks. There are many types of delays, such as discrete delay, finite distributed delay, infinite distributed delay, neutral-type delay, and so on. The emergence of these delays is often the main reason for the oscillation, instability, and deteriorated performance of the dynamical systems. Therefore, the dynamic system with time delay becomes a hot topic in the theoretical and application realms.
Since Pecora and Carroll [35] showed that the synchronization of two chaotic systems with different initial conditions, the synchronization of various dynamic chaotic systems has become a research hot spot (see Refs. [8] and [36] for a review). Inspired by this, Mainieri and Rehacek [31] first proposed the concept of the projective synchronization, which the drive and response systems synchronize up to scale factor. Because of its proportional feature, the projective synchronization can realize faster communication through extending binary digital to M-nary digital [11]. Besides, the projective synchronization can be viewed as a general form of complete synchronization and anti-synchronization. Recently, some scholars have studied projective synchronization of fractional-order neural network with or without delay [4, 44, 49, 55]. Wang et al. [49] investigated hybrid projective synchronization of fractional-order chaotic systems with time delay and realized the synchronization between two different structural chaotic systems using nonlinear controller; Velmurugan et al. [44] studied the hybrid projective synchronization of a fractional-order memristor-based neural networks with time delays; Bao et al. [4] investigated the projective synchronization of fractional-order memristor-based neural networks and derived some sufficient conditions by defining a Lyapunov function. However, to the best of our knowledge, there is not much research about the projective synchronization of memristor-based fractional-order neural networks.
Furthermore, the finite-time stability first proposed by Kamenkov [24] depicts a quantitative behavior of the system state variables in a specified finite-time interval. A system is said to be finite-time stable if the norm of its state variables is less than a certain boundary in a finite time when given any bounded initial value. Ref. [7] indicates that the finite-time stable system has faster convergence speed and better robustness. At present, although there are some studies on the finite-time stability and synchronization of fractional-order neural networks [33, 41, 45, 53, 58], the finite-time projective synchronization of MDFNNS has not been reported to the best of our knowledge.
Motivated by the above discussion, the main objective of our paper is to investigate the finite-time projective synchronization of MDFNNs. With the aid of memristor mathematical model, set-valued map, differential inclusion, Gronwall–Bellman inequality, Volterra-integral equation, linear feedback controller, and the definition of finite-time projective synchronization, two new sufficient conditions are derived to ensure the finite-time projective synchronization of memristor-based fractional-order neural networks with or without time delay. The main contributions of this paper can be summarized as follows.
-
(1)
We first investigate the finite-time projective synchronization of MDFNNs based on the proposed definition of finite-time projective synchronization according to the concept of the finite-time stability. The fractional-order differential equation is transformed into Volterra-integral equation, which simplifies our proof process of the main theorem.
-
(2)
We obtain two sufficient conditions to guarantee the finite-time projective synchronization of the model used in this paper. Meanwhile, our results can be easily extended to the complete synchronization and anti-synchronization. Moreover, we analyze the feasible region of the settling time \(T_\mathrm{s}\), which can be calculated by solving a simple inequality condition. The rest of this paper is organized as follows. The mathematical model of the memristor and the definition of fractional-order differential are introduced in Sect. 2. In Sect. 3, we describe the drive-response MDFNNs models, propose the definition of the finite-time projective synchronization, and introduce an assumption and two lemmas. Section 4 presents the main results of this paper, including two theorems and two corollaries. Two numerical examples are given to verify the correctness of main results in Sect. 5. Finally, we conclude the whole paper in Sect. 6.
Notations We define the norm of the vector as \(\Vert a\Vert =\sum _{i=1}^n\vert a_i \vert \), and the norm of the matrix as \(\Vert A\Vert =\text{ max }_j\sum _{i=1}^n\vert a_{ij}\vert \), respectively, where \(a_i\) and \(a_{ij}\) are the component of the vector a and the matrix A. \(\mathbb {Z}^+\) are the sets of positive integer numbers, and \(\mathbb {R} \) denotes the real set.
2 Preliminaries
In order to present our memristor-based delay fractional-order neural networks (MDFNNs), we need to prepare some knowledge about the mathematical model of the memristor and the fractional calculus.

Memistor diagram with a simplified equivalent circuit
2.1 Memristor model
According to the physical model of the HP memristor (see Fig. 1) [43], we have
where D denotes the semiconductor film thicknesses, w(t) is the state variable of the memristor, \(\mu _V\) is average ion mobility, i(t) and v(t) correspond to the current and voltage, respectively.
From Eq. (1), it yields the following equation for w(t),
where q(t) denotes the total charge passing through the memristor. According to Eq. (2), we obtain the calculation model of charge-controlled memristor
The current–voltage characteristic of the memristor has significant pinched hysteresis loop fingerprint (see Fig. 2).

The current–voltage characteristic of the memristor with a sinusoidal current
In order to simplify the mathematical model of the memristor on the premise of obtaining the pinched hysteresis feature, we select a surrogate memristor model (see Fig. 3) as follows [50]

The current–voltage characteristic of the surrogate memristor model
2.2 Caputo fractional calculus
Since Leibniz and L’Hospital began to discuss fractional calculus in 1965, many famous mathematicians have given the definitions of fractional calculus from their different points of view. There are three well-known definitions of fractional calculus, which are given by Grünwald–Letnikov, Riemann-Liouville and Caputo, respectively. In contrast to the Grünwald–Letnikov and Riemann–Liouville fractional derivative, the Caputo fractional derivative has the following advantages: (1) it is not necessary to define the fractional-order initial conditions when solving fractional-order differential equations using Caputo’s definition; (2) the derivative of a constant is 0 under the Caputo’s definition; (3) it is integer-order derivative in the laplace transform of the fractional derivative using Caputo’s definition. For these reasons, Caputo’s definition is more commonly used in engineering and science. Next, we give the definition of Caputo’s fractional calculus.
Definition 1
[40] The Caputo’s fractional derivative of order q for a function \(f(t)\in C^{n+1}([t_0,\infty ],\mathbb {R})\) is defined as follows
where \(n-1<q<n, n\in \mathbb {Z}^{+}, t>t_0\), \(\varGamma (\cdot )\) is the gamma function defined as \(\varGamma (q)=\int _{0}^{\infty }t^{q-1}e^{-t}\hbox {d}t\). \( C^{n+1}\left( [t_0,\infty ],\mathbb {R}\right) \) denotes the set of all \(n+1\) order continuous differentiable functions on the interval \([t_0,\infty ]\).
In particular, when \(0<q<1\), we have \(n=1\) and Eq. (5) can be rewritten as
For the sake of simplicity, we use the symbol \(D^{q}f(t)\) to denote the Caputo’s fractional derivative.
2.3 The set-valued map and differential inclusion
For a differential system with discontinuous right-hand sides, Filippov gave a definition of differential inclusion solution, which can overcome the problem that the discontinuous solution cannot be given in the classical solution frame. The set-valued map theory provides the necessary basis for the study of differential inclusion problem.
Definition 2
[1] Let X and Y be two sets, a map \(F:X\rightarrow Y\) is called set-valued map, if any \(x\in X\), there is always a corresponding set \(F(x)\subset Y\). F(x) is said to the value or image of F at x.
Definition 3
[1] A set-valued map \(F:X\rightarrow Y\) is said to be upper-semi-continuous at \(x_0\in X\), if for every neighborhood \(N_Y\) of \(F(x_0)\subset Y\), there exists a neighborhood \(N_X\) of \(x_0\) such that \(F(N_X)=\bigcup _{x\in N_X}F(x)\subset N_Y\). If F is upper-semi-continuous for every \(x\in X\), then the set-valued map F is upper-semi-continuous on the set X.
Consider the following differential equation system
where g(x, t) is discontinuous. And the Filippov solution of (7) is given as follows.
Definition 4
[18] A vector function x(t) is a solution of the system (7) on \([t_0,t_1]\) in Filippov’s sense, if x(t) is absolutely continuous on any compact interval \([t_0,t_1]\) and for almost all \(t\in [t_0,t_1]\) such that
where
In Eq. (9), \(\overline{co}\{\cdot \}\) is the convex closure hull of a set, \(\mathbb {B}_{\delta }(x)=\{y|\Vert y-x \Vert \le \delta \}\) and \(\mu (N)\) denotes the usual Lebesgue measure of set N.
3 Network models
We consider the drive-response synchronization problem of a class of memristor-based delay fractional-order neural networks (MDFNNs) described by the following two differential equations.
The drive system is expressed as follows
The response system is expressed as follows
where \(x_i(t)\) and \(y_i(t)\) denote the state variable associated with the ith neuron of drive and response system, respectively. \(0<q<1\) is the fractional order, and \(\tau \) is the time delay. \(f(\cdot ), g(\cdot )\) are the activation functions without and with time delay, respectively. \(c_i>0\) denotes the self-feedback weight, and \(I_i\) is the external input bias value. \(u_i(t)\) in the response system (11) is a linear feedback controller to be designed for making the drive-response system reach synchronization. The norm of the initial conditions of systems (10) and (11) is, respectively, \(\Vert \psi (t)\Vert =\text{ sup }_{s\in [-\tau ,0]}\vert \psi (s) \vert \), and \(\Vert \phi (t)\Vert =\text{ sup }_{s\in [-\tau ,0]}\vert \phi (s) \vert \). \(a_{ij}^{(1)}(x_j(t)), a_{ij}^{(2)}(y_j(t))\) are memristive connection weights without time delay and \(b_{ij}^{(1)}(x_j(t-\tau )), b_{ij}^{(2)}(y_j(t-\tau ))\) are memristive connection weights with time delay. According to the characteristics of the current–voltage of the memristor, the connection weights satisfy the following conditions
where the switching jumps \(T_j>0\), memristive connection weights \(\hat{a}_{ij}, \check{a}_{ij}, \hat{b}_{ij}, \check{b}_{ij}, i,j=1,2,\ldots ,n\) are constants.
From the above description, we can see that models (10) and (11) are complex switching systems with discontinuous right-hand side. Through the set-valued map and differential inclusions theory introduced in Sect. 2.3, we define the following set-valued maps
where \(i,j=1,2,\ldots ,n, t>0.\)
Next, models (10) and (11) can be rewritten as a form of differential inclusions
Or equivalently, there exist the measurable functions \(\bar{a}_{ij}(t) \in K\left[ a_{ij}^{(1)}(x_j(t))\right] \), \(\bar{b}_{ij}(t)\in K\left[ b_{ij}^{(1)}(x_j(t-\tau ))\right] \),
\(\widetilde{a}_{ij}(t)\in K\left[ a_{ij}^{(2)}(y_j(t))\right] \), \(\widetilde{b}_{ij}(t)\in K\left[ b_{ij}^{(2)}(y_j(t-\tau ))\right] \) to make drive and response systems meet
The error system between the drive system (16) and the response system (17) is defined as
where \(\alpha \in \mathbb {R}\) is a real scaling factor. Especially, the initial condition of the error system is \(e_{i}(t_0)=\phi _{i}(t)-\alpha \psi _{i}(t)\).
We select the following simple feedback controller
where \( k_i\in \mathbb {R}^{+},i=1,2,\ldots ,n\) is the control gain.
Definition 5
Under the controller (19), the drive system (16) and the response system (17) is said to be projective synchronization in finite time, if there exist positive numbers \(\{t_0,J,\delta ,\varepsilon \}, \delta <\varepsilon \), if and only if \(\Vert e(t_0)\Vert <\delta \) implies \(\Vert e(t)\Vert <\varepsilon , \forall t\in J=[t_0,t_0+T]\), i.e., if the error system \(\Vert e(t)\Vert \) is finite-time stable, the drive system (16) and the response system (17) can achieve the finite-time projective synchronization. Additionally, \(T_\mathrm{s}=T\) is called the finite settling time.
Remark 1
In Definition 5, the parameter \(\varepsilon \) stands for the set of all allowable states of the error system, and the parameter \(\delta \) stands for the set of all initial states of the error system. Through Definition 5, we transform the projective synchronization problem into the stability problem of the error system.
In order to obtain our main results, we need the following an assumption and two lemmas.
Assumption 1
The activation functions \(f_j(\cdot ), g_j(\cdot )\) are Lipschitz continuous on \(\mathbb {R}\), i.e., there exist positive constants \(m_j, l_j\),
Lemma 1
[12] Under Assumption 1, if \(f_j(\pm T_j)=0, j=1,2,\ldots ,n\) then
for \(i,j=1,2,\ldots ,n\), i.e., for any \(\eta _{ij}(x_j(t))\in K\left[ a_{ij}(x_j(t)\right] \), \(\eta _{ij}(y_j(t))\in K\left[ a_{ij}(y_j(t)\right] \),
where \(\alpha _{ij}^{u}=\text{ max }\{\hat{a}_{ij}, \check{a}_{ij}\}\).
Lemma 2
[5] Let \(\lambda (t),\beta (t),u(t)\) be real-valued functions defined on an interval I. Assume that \(\beta (t),u(t)\) are continuous and \(\lambda (t)\) is integrable on \(I=[t_0,t],t_0<t\), we have
-
(1)
If \(\beta (t)\) is nonnegative and u(t) satisfies the integral inequality
$$\begin{aligned} u(t)\le \lambda (t)+\int _{a}^{t}\beta (s)u(s)\hbox {d}s, \end{aligned}$$then
$$\begin{aligned} u(t)\le \lambda (t)+\int _{a}^{t}\lambda (s)\beta (s)\hbox {exp}\left( \int _{s}^{t}\beta (r)dr\right) \hbox {d}s, \end{aligned}$$ -
(2)
in addition, if \(\lambda (t)\) is non-decreasing, then
$$\begin{aligned} u(t)\le \lambda (t)\hbox {exp}\left( \int _a^t\beta (s)\hbox {d}s\right) . \end{aligned}$$
4 Main results
In this section, we will derive the sufficient conditions for finite-time projective synchronization of the drive system (10) and the response system (11) using the Volterra-integral equation and Gronwall–Bellman inequality.
Theorem 1
Under Assumption 1 and the linear feedback controller (19), the error system (18) of the drive system (16) and the response system (17) can achieve finite-time projective synchronization, when \(\Vert e(t_0)\Vert =\Vert \Phi (t)-\alpha \Psi (t)\Vert <\delta \), where \(\Phi (t)=(\phi _{1}(t),\phi _{2}(t),\ldots ,\phi _n(t))^T\), \(\Psi (t)=(\psi _{1}(t),\psi _{2}(t),\ldots ,\psi _n(t))^T\), if the following sufficient condition holds
where \(\mathcal {A}=(a_{ij})_{n\times n}\), \(\mathcal {B}=(b_{ij})_{n\times n}\), \(\mathcal {M}=\text{ diag }\{m_1,m_2,\ldots ,m_n\}\), \(\mathcal {L}=\text{ diag }\{l_1,l_2,\ldots ,l_n\}\).
Proof
According the error system (18), we have
Using Lemma 1, we have
where \(a_{ij}=\text{ max }\{\hat{a}_{ij}, \check{a}_{ij}\}\), \(b_{ij}=\text{ max }\{\hat{b}_{ij}, \check{b}_{ij}\}\).
For simplicity, we rewrite the above inequality into a vector form
where \(e(t)=(e_1(t),e_2(t),\ldots ,e_n(t))^T\), \(\Lambda =\text{ diag }\{c_1+k_1, c_2+k_2,\ldots , c_n+k_n\}\).
When \(0<q<1\), Eq. (21) is equivalent to the following Volterra-integral equation
Applying norm on both sides of Eq. (22), we can obtain
By means of integral transformation and inequality amplification for Eq. (23), we have

Substituting Eq. (24) into Eq. (23), we get
Let \(\lambda (t)=\left( 1+\frac{t^{q}-(t-\tau )^q}{\varGamma (q+1)} \right) \Vert e(t_0)\Vert \), \(\beta (t)=\frac{1}{\varGamma (q)}\big (\Vert \mathcal {AL}-\Lambda \Vert +\Vert \mathcal {BM}\Vert \big )(t-s)^{q-1}\). Obviously, \(\lambda (t)\) is non-decreasing function when \(t\ge 0\), according to Lemma 2, we can obtain
From condition (20), we have \(\Vert e(t)\Vert < \varepsilon \). According Definition 5, the error system (18) is finite-time stable, thus, the MDFNNs (10) and (11) achieve the finite-time projective synchronization. The proof of Theorem 1 is completed.
Remark 2
We can calculate the finite settling time \(T_\mathrm{s}\) by the condition (20). When the initial conditions and the fractional order are determined in the drive-response MDFNNs, and then given a \(\varepsilon \), we can always obtain the settling time \(T_\mathrm{s}\) by solving the inequality condition (20). Next, we will draw the feasible region of the settling time \(T_\mathrm{s}\). Given the corresponding parameter values, we plot the curves of the following equations in the Cartesian coordinates (see Fig. 4).
From Fig. 4, we can see that the settling time \(T_\mathrm{s}\) is affected by the initial value \(\delta \), delay \(\tau \) and \(\varepsilon \).

The feasible area of the settling time \(T_\mathrm{s}\) when the parameters are \(V=10, \delta =2, \tau =0.4, q=0.9, \varepsilon =1000, t=0:0.01:0.6\)
Remark 3
The results of Theorem 1 can be easily extended to the memristor-based fractional-order neural network without delay as shown below.
The drive system is expressed as follows
The response system is expressed as follows
Using the same analytical method of Theorem 1, we have the following result.
Theorem 2
Under Assumption 1 and the linear feedback controller (19), the drive system (27) and the response system (28) can achieve projective synchronization, if the following condition holds
Proof
The proof process is similar to that of Theorem 1 and is omitted here.
Remark 4
Although some references have studied the projection synchronization problem of fractional neural network with or without memristor [4, 46, 49, 55], almost no one has studied the finite-time projective synchronization problem. Our approach provides a solution to the study of MDFNNs.
Remark 5
According to the different \(\alpha \) values, the projective synchronization can also be extended to the investigation of the complete synchronization(\(\alpha =1\)) and anti-synchronization(\(\alpha =-1\)) of the drive-response systems. So, we have the following two corollaries.
Corollary 1
If the scaling factor \(\alpha =1\) in the error system (18) and the controller (19), under Assumption 1, the MDFNNs (10) and (11) can achieve the finite-time complete synchronization if the sufficient condition (20) holds.
Corollary 2
If the scaling factor \(\alpha =-1\) in the error system (18) and the controller (19), under Assumption 1, the MDFNNs (10) and (11) can achieve the finite-time anti-synchronization if the sufficient condition (20) holds.
5 Simulation examples
In this section, two numerical examples are given to show the effectiveness of our main results. We use the Predictor-Corrector method [6] to solve the approximate numerical solutions of the fractional-order delay differential equations.
Example 1
Consider the following three-dimensional memristor-based fractional-order neural networks without delays as the drive system
The corresponding response system is given by
All parameters of the drive system (30) and the response system (31) are selected as follows
Note: \(x_1\) denotes \(x_1(t)\) for simplicity.
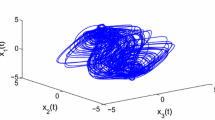
Figure 5 shows that the drive system (30) has a limit cycle in the case of the above mentioned parameters. Taking the control gain \(k_1=k_2=k_3=2\) in the controller (19), Lipschitz constants \(l_1=l_2=l_3=1\), \(\delta >\Vert e(0)\Vert =\Vert y(0)-\alpha x(0)\Vert \), \(\alpha \) is scaling factor of projective synchronization. Figures 6, 7, 8 show the state trajectories when \(\alpha \) is chosen a different value. According condition (29), let \(\delta =1.1>\Vert e(0)\Vert =1, \varepsilon =7.7\), we can calculate the settling time \(T_\mathrm{s}=0.2074\) when \(\alpha =3\).

Limit cycle of system (30) with initial value \(x_0=(-0.5,0.3,0.4)^T\)
Remark 6
We can see that the synchronization state errors do not stabilize to zeros from Fig. 9, but stable at a point less than \(\varepsilon =7.7\). The reason for this phenomenon is that we define the projective synchronization condition defined in Definition 5 is \(\Vert e(t_0)\Vert < \varepsilon .\) Obviously, Fig. 9 meets this condition. This proves the correctness of our results.
Remark 7
The settling time \(T_\mathrm{s}\) calculated by the theory does not seem to agree with the actual running time. This is due to the simulation software (MATLAB R2016a) and the algorithms themselves (predictor-corrector PECE method of Adams–Bashforth–Moulton type [16]).

(Color online) The state trajectories of x(t), y(t) when \(\alpha =-1\)

(Color online) The state trajectories of x(t), y(t) when \(\alpha =1\)

(Color online) The state trajectories of x(t), y(t) when \(\alpha =3\)
Figure 9 presents the synchronization error curves of the drive systems (30) and response system (31) when \(\alpha =3\).

The synchronization error curves of x(t), y(t) when \(\alpha =3\)
Example 2
Consider the following two-dimensional memristor-based delay fractional-order neural networks as the drive system
The corresponding response system is given by
The parameters of the system (32) and (33) are listed below

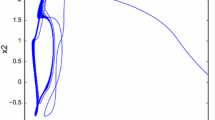
Limit cycle of system (32) with initial value \(x_0=(-0.5,0.3,0.4)^T\)
Note: for simplicity, \(a_{ij}(x_j)\) denotes \(a_{ij}(x_j(t))\), and \(b_{ij}(x_j)\) denotes \(b_{ij}(x_j(t-\tau )), i,j=1,2.\)

(Color online) The state trajectories of x(t), y(t) when \(\alpha =-1\)

(Color online) The state trajectories of x(t), y(t) when \(\alpha =1\)

(Color online) The state trajectories of x(t), y(t) when \(\alpha =3\)
Figure 10 illustrates that the drive system (32) has a limit cycle when taking the parameters above. Taking the control gain \(k_1=4, k_2=2\) in the controller (19), Lipschitz constants \(l_1=l_2=1, m_1=m_2=1\). Thus, we have \(\delta >\Vert e(0)\Vert =\Vert y(0)-\alpha x(0)\Vert \), \(\alpha \) is the scaling factor of projective synchronization. Figures 11, 12, 13 show the state trajectories when \(\alpha =-1, 1, 3\), respectively. Figure 14 depicts the synchronization error curves of the drive system (32) and the response system (33) when \(\alpha =3\). According the condition (20), let \(\delta =6.1>\Vert e(0)\Vert =6\), \(\varepsilon =3000\), we can calculate the settling time \(T_\mathrm{s}=0.4186\).

The synchronization error curves of x(t), y(t) when \(\alpha =3\)



Remark 8
In order to make the inequality condition (20) always holds, besides choosing an appropriate \(\varepsilon \), we also need to ensure \(t-\tau \ge 0\).
In this example, we also draw the phase diagrams of the drive-response systems when \(\alpha =-1, 1, 3\) as shown in Figs. 15, 16, 17.
6 Conclusions
The finite-time projective synchronization problem of MDFNNs is studied based on the definition of finite-time projective synchronization. Using the memristor model, fractional-order differential, the set-valued map, differential inclusion theory, Gronwall–Bellman inequality, and Volterra-integral equation of the fractional-order error system between the drive system and the response system, we derive the sufficient conditions of the projective synchronization of MDFNNs under a simple linear feedback controller. We analyze the feasible region of the settling time. Meanwhile, our results can be easily extended to the cases of complete synchronization and anti-synchronization. The proof of the main theorem is simple, and the sufficient conditions are easy to verify. Moreover, we may calculate the settling time by these sufficient conditions. Finally, Two numerical examples have been presented to show the correctness of our results. The future work mainly includes the following aspects: (1) how to analyze the projective synchronization of more complex fractional-order neural network model with stochastic perturbation and various time delays, such as time-varying delays, infinite distributed delays and neutral-type delays; (2) how to derive the fixed-time synchronization conditions of MDFNNs. In summary, the fractional-order neural networks still have a lot of problems worthy of further study.
References
Aubin, J.P., Frankowska, H.: Set-Valued Analysis. Springer, Berlin (2009)
Bagley, R.L., Torvik, P.: A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 27(3), 201–210 (1983)
Bao, H., Park, J.H., Cao, J.: Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 82(3), 1343–1354 (2015)
Bao, H.B., Cao, J.D.: Projective synchronization of fractional-order memristor-based neural networks. Neural Netw. 63, 1–9 (2015)
Bellman, R., et al.: The stability of solutions of linear differential equations. Duke Math. J. 10(4), 643–647 (1943)
Bhalekar, S., Daftardar-Gejji, V.: A predictor–corrector scheme for solving nonlinear delay differential equations of fractional order. J. Fract. Calc. Appl. 1(5), 1–9 (2011)
Bhat, S.P., Bernstein, D.S.: Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38(3), 751–766 (2000)
Boccaletti, S., Kurths, J., Osipov, G., Valladares, D., Zhou, C.: The synchronization of chaotic systems. Phys. Rep. 366(1), 1–101 (2002)
Caponetto, R., Dongola, G., Fortuna, L., Petráš, I.: Fractional Order Systems: Modeling and Control Applications. World Scientific Series on Nonlinear Science. World Scientific, Singapore (2010)
Carbajal, J.P., Dambre, J., Hermans, M., Schrauwen, B.: Memristor models for machine learning. Neural Comput. 27(3), 725 (2015)
Chee, C., Xu, D.: Chaos-based m-ary digital communication technique using controlled projective synchronisation. IEE Proc. Circuits Devices Syst. 153(4), 357–360 (2006)
Chen, J., Zeng, Z., Jiang, P.: Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 51, 1–8 (2014)
Choi, S., Sheridan, P., Lu, W.D.: Data clustering using memristor networks. Sci. Rep. 5, 10492 (2015)
Cui, X., Yu, Y., Wang, H., Hu, W.: Dynamical analysis of memristor-based fractional-order neural networks with time delay. Mod. Phys. Lett. B 30(18), 1650271 (2016)
Dadras, S., Momeni, H.R., Qi, G., Wang, Z.L.: Four-wing hyperchaotic attractor generated from a new 4d system with one equilibrium and its fractional-order form. Nonlinear Dyn. 67(2), 1161–1173 (2012)
Diethelm, K., Freed, A.D.: The fracpece subroutine for the numerical solution of differential equations of fractional order. Forschung und wissenschaftliches Rechnen 1999, 57–71 (1998)
Duan, S., Zhang, Y., Hu, X., Wang, L., Li, C.: Memristor-based chaotic neural networks for associative memory. Neural Comput. Appl. 25(6), 1437–1445 (2014)
Filippov, A.F.: Differential Equations with Discontinuous Righthand Sides: Control Systems, vol. 18. Springer, Berlin (2013)
Ghamisi, P., Couceiro, M.S., Benediktsson, J.A., Ferreira, N.M.: An efficient method for segmentation of images based on fractional calculus and natural selection. Expert Syst. Appl. 39(16), 12407–12417 (2012)
Grigorenko, I., Grigorenko, E.: Chaotic dynamics of the fractional Lorenz system. Phys. Rev. Lett. 91(3), 034101 (2003)
Gupta, I., Serb, A., Khiat, A., Zeitler, R., Vassanelli, S., Prodromakis, T.: Real-time encoding and compression of neuronal spikes by metal-oxide memristors. Nat. Commun. 7, 12805 (2016)
Hernández-Mejía, C., Sarmiento-Reyes, A., Vázquez-Leal, H.: A novel modeling methodology for memristive systems using homotopy perturbation methods. Circuits Syst. Signal Process. 36(3), 1–22 (2016)
Hu, X., Duan, S., Chen, G., Chen, L.: Modeling affections with memristor-based associative memory neural networks. Neurocomputing 223(5), 129–137 (2016)
Kamenkov, G.: On stability of motion over a finite interval of time. J. Appl. Math. Mech. 17(2), 529–540 (1953)
Koh, C.G., Kelly, J.M.: Application of fractional derivatives to seismic analysis of base-isolated models. Earthq. Eng. Struct. Dyn. 19(2), 229–241 (1990)
Lenzi, E., dos Santos, M., Lenzi, M., Vieira, D., da Silva, L.: Solutions for a fractional diffusion equation: anomalous diffusion and adsorption–desorption processes. J. King Saud Univ. Sci. 28(1), 3–6 (2016)
Leon, C.: Memristor-the missing circuit element. IEEE Trans. Circuit Theory 18(5), 507–519 (1971)
Ma, J., Wu, F., Ren, G., Tang, J.: A class of initials-dependent dynamical systems. Appl. Math. Comput. 298, 65–76 (2017)
Machado, J.T.: Analysis and design of fractional-order digital control systems. Syst. Anal. Model. Simul. 27(2–3), 107–122 (1997)
Magin, R.L.: Fractional calculus models of complex dynamics in biological tissues. Comput. Math. Appl. 59(5), 1586–1593 (2010)
Mainieri, R., Rehacek, J.: Projective synchronization in three-dimensional chaotic systems. Phys. Rev. Lett. 82(15), 3042 (1999)
Metzler, R., Klafter, J.: The random walk’s guide to anomalous diffusion: a fractional dynamics approach. Phys. Rep. 339(1), 1–77 (2000)
Mobayen, S.: Finite-time tracking control of chained-form nonholonomic systems with external disturbances based on recursive terminal sliding mode method. Nonlinear Dyn. 80(1–2), 669–683 (2015)
Naous, R., Al-Shedivat, M., Salama, K.N.: Stochasticity modeling in memristors. IEEE Trans. Nanotechnol. 15(1), 15–28 (2016)
Pecora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64(8), 821 (1990)
Pecora, L.M., Carroll, T.L.: Synchronization of chaotic systems. Chaos Interdiscip. J. Nonlinear Sci. 25(9), 097611 (2015)
Pershin, Y.V., Di Ventra, M.: Solving mazes with memristors: a massively parallel approach. Phys. Rev. E 84(4), 046703 (2011)
Pershin, Y.V., La Fontaine, S., Di Ventra, M.: Memristive model of amoeba learning. Phys. Rev. E 80(2), 021926 (2009)
Petráš, I.: Fractional-order nonlinear controllers: design and implementation notes. In: Proceedings of the IEEE ICCC2016, High Tatras, Slovak Republic (2016)
Podlubny, I.: Fractional Differential Equations, vol. 198. Academic press, New York (1998)
Rakkiyappan, R., Velmurugan, G., Cao, J.: Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with time delays. Nonlinear Dyn. 78(4), 2823–2836 (2014)
Sapora, A., Cornetti, P., Carpinteri, A., Baglieri, O., Santagata, E.: The use of fractional calculus to model the experimental creep-recovery behavior of modified bituminous binders. Mater. Struct. 49(1–2), 45–55 (2016)
Strukov, D.B., Snider, G.S., Stewart, D.R., Williams, R.S.: The missing memristor found. Nature 453(7191), 80–83 (2008)
Velmurugan, G., Rakkiyappan, R.: Hybrid projective synchronization of fractional-order memristor-based neural networks with time delays. Nonlinear Dyn. 83(1–2), 419–432 (2016)
Wang, B., Ding, J., Wu, F., Zhu, D.: Robust finite-time control of fractional-order nonlinear systems via frequency distributed model. Nonlinear Dyn. 85(4), 2133–2142 (2016)
Wang, F., Yang, Y., Hu, M., Xu, X.: Projective cluster synchronization of fractional-order coupled-delay complex network via adaptive pinning control. Phys. A Stat. Mech. Appl. 434, 134–143 (2015)
Wang, F.Z., Helian, N., Wu, S., Yang, X., Guo, Y., Lim, G., Rashid, M.M.: Delayed switching applied to memristor neural networks. J. Appl. Phys. 111(7), 07E317 (2012)
Wang, L., Shen, Y., Yin, Q., Zhang, G.: Adaptive synchronization of memristor-based neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 26(9), 2033–2042 (2015)
Wang, S., Yu, Y., Wen, G.: Hybrid projective synchronization of time-delayed fractional order chaotic systems. Nonlinear Anal. Hybrid Syst. 11, 129–138 (2014)
Wu, A., Zeng, Z.: Dynamic behaviors of memristor-based recurrent neural networks with time-varying delays. Neural Netw. 36, 1–10 (2012)
Wu, G.C., Baleanu, D., Xie, H.P., Chen, F.L.: Chaos synchronization of fractional chaotic maps based on the stability condition. Phys. A Stat. Mech. Appl. 460, 374–383 (2016)
Wu, X., Lu, Y.: Generalized projective synchronization of the fractional-order chen hyperchaotic system. Nonlinear Dyn. 57(1), 25–35 (2009)
Xiao, J., Zhong, S., Li, Y., Xu, F.: Finite-time Mittag-Leffler synchronization of fractional-order memristive BAM neural networks with time delays. Neurocomputing 219, 431–439 (2017)
Xu, J., Wang, D., Dang, C.: A marginal fractional moments based strategy for points selection in seismic response analysis of nonlinear structures with uncertain parameters. J. Sound Vib. 387, 226–238 (2017)
Yu, J., Hu, C., Jiang, H., Fan, X.: Projective synchronization for fractional neural networks. Neural Netw. 49, 87–95 (2014)
Zha, J., Huang, H., Liu, Y.: A novel window function for memristor model with application in programming analog circuits. IEEE Trans. Circuits Syst. II Express Briefs 63(5), 423–427 (2016)
Zhang, Y., Wang, X., Li, Y., Friedman, E.G.: Memristive model for synaptic circuits. IEEE Trans. Circuits Syst. II Express Briefs (2016). doi:10.1109/TCSII.2016.2605069
Zheng, M., Li, L., Peng, H., Xiao, J., Yang, Y., Zhao, H.: Finite-time stability and synchronization for memristor-based fractional-order Cohen–Grossberg neural network. Eur. Phys. J. B 89(9), 204 (2016)
Zhou, P., Ding, R., Cao, Y.X.: Multi drive-one response synchronization for fractional-order chaotic systems. Nonlinear Dyn. 70(2), 1263–1271 (2012)
Acknowledgements
This paper is supported by the National Key Research and Development Program (Grant No.2016YFB0800602), the National Natural Science Foundation of China (Grant Nos.61472045, 61573067).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zheng, M., Li, L., Peng, H. et al. Finite-time projective synchronization of memristor-based delay fractional-order neural networks. Nonlinear Dyn 89, 2641–2655 (2017). https://doi.org/10.1007/s11071-017-3613-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3613-z