
Abstract
This article deals with the finite time stabilization (FTSB) and fixed time stabilization (FXTSB) problems for a high-order class of bidirectional associative memories neural networks (NNs) with time varying delay. Compared with the previous studies, some new kinds of controllers are designed to stabilize in finite time and fixed time the considered NNs. Based on finite time and fixed time stability theory, we derive new sufficient conditions which ensure the FTSB and the FXTSB. Meanwhile, the gains of the controllers proposed could be constructed by solving linear matrix inequalities. Then, the settling time for the FXTSB is estimated and a high-precision of these time is obtained. Finally, two numerical examples with graphical illustrations are given to appear the effectiveness of our theoretical main results.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In this article, we discuss the finite time stabilization and the fixed time stabilization for a high-order class of BAM delayed NNs. To investigate the FTSB and the FXTSB of the above-mentioned problem, we consider the following:
in which \(\mu _i(.)\) and \(\nu _j(.)\) stand for the neuron state, \(C=diag\left( c_1,\ldots ,c_n\right) \) and \(D=diag\left( d_1,\ldots ,d_n\right) \) with \(c_i>0\) and \(d_j>0\) stand respectively for the rate of the reset of the ith and jth unit in the resting state and disconnected of external inputs of network; \(A_1=\left( a^1_{ij}\right) _{n\times n}\), \(A_2=\left( a^2_{ji}\right) _{n\times n}\), \(B_1=\left( b^1_{ij}\right) _{n\times n}\) , \(B_2=\left( b^2_{ji}\right) _{n\times n}\) and \(T_{i}=[T_{ijk}]_{n\times n}\), \(O_{j}=[O_{jik}]_{n\times n}\) stand for the interconnection weight matrices of the neurons and the second-order synaptic weights matrices. \(f_1=\left( f^{(1)}_{1},\ldots ,f^{(1)}_{n}\right) ^T\), \(f_2=\left( f^{(2)}_{1},\ldots ,f^{(2)}_{n}\right) ^T\), \(g_1=\left( g^{(1)}_{1},\ldots ,g^{(1)}_{n}\right) ^T,\) and \(g_2=\left( g^{(2)}_{1},\ldots ,g^{(2)}_{n}\right) ^T\) stand for the neuron activation functions. \(0<\tau (.)\le \bar{\tau }\) and \(0<\sigma (.)\le \bar{\sigma }\) stand for the transmission delays. The initial condition
where \(\phi _i(.)\in C\left( [-\bar{\tau }, 0],\mathbb {R}^n\right) \) and \(\psi _j(.)\in C\left( [-\bar{\sigma }, 0],\mathbb {R}^n\right) \).
It is well known that the lower-order class of NNs is expected to produce the poorest quality of solution with a great complexity as measured by the order of the network [7]. Also, the high-order class of NNs offers faster convergence rate, higher fault tolerance and greater storage capacity [63] which explains the use of this class in many applications such as robotic manipulator, the resolution of optimization problems and other fields [6, 8,9,10, 13, 27, 33, 35, 44].
In practice, the time delay often occurs in the implementation of NNs [5, 9, 14, 26, 32, 36, 45, 46] and causes a high complexity in the dynamic behaviours of network. Also it can destabilize the system and create some oscillation and bifurcation in NNs which explain the intensity of research around the effect of the delays in the dynamic behaviours of NNs [4, 11, 17, 22, 25, 29, 31, 62].
In 1988, Kosto was introduced the class of bidierctionnel associative memories (BAM) neural networks [21]. Due to its range in many areas such that pattern recognition and combinatorial optimization this class of NNs it becomes one of the most important class of delayed NNs. Recently, many authors has been extensively studied the class of BAM neural networks. In fact, the results around the Lyapunov stability of this class are obtained in [51,52,53]. In [68, 75], the periodic solutions of this class of NNs is investigated bases on the coincidence degree theorem. Moreover, the exponential dichotomy and the fixed point theorems are used for the study of the almost periodic solution [37, 74] and reference therein.
Contrary to the asymptotic convergence that can implies a large time (infinite) for obtaining the desired precision, the FTS ensure that the physical process achieves the convergence in a specific time. Thanks to this proprieties, this concept shows nice features such as robustness to uncertainties [19].
From the practical standpoint such as robotics, the challenge in system theory is the design of suitable controllers able to bring a system back to a desired position as quickly as possible. For example, if the finite time synchronization does not guarantee and only the exponential synchronization is considered, the coupling protocol should exist for ever [38]. Otherwise, for chaotic oscillator, a small error can produce a high difference between nodes. In addition, FTS can lead to better NNs performances in the disturbance rejection [38]. To summarize, the study of FTS is of major interest both in theoretical analysis and real-life applications.
Recently, the FTS problems of NNs has been widely investigated [2, 39,40,41, 57, 60, 61, 64,65,66,67]. However, despite the design of many finite time controllers for different kinds of NNs, there is no general controller able to guarantee the FTSB of a lower order and a high-order class of delayed BAM NNs because it is delicate to design a Lyapunov–Krasovskii functional (LKF) satisfying the derivative condition of the FTS of delayed systems [49].
Despite the contribution that provides the FTS, the time function indicating when the trajectories reach the equilibrium point, variously known as the settling-time depends on the initial conditions of the dynamical systems. On the one hand, the variation of the initial values has a great effect on the estimation of the settling time. On the other hand, in practice, the knowledge in advance of the initial conditions is very difficult [20]. In this context, the concept of fixed time stability occurs naturally where Polyakov was the first to introduce these notation in [55] by imposing the boundedness of the settling time to FTS systems. In practice, the fixed time stability is encountered in control problems such power systems [50], fixed-time observer [47]. In the existing literature, the research around the FXTS has just started and there are few results on the FXTS concept. One of the most important results on this concept is the extension of the results of Polyakov given in [55] to the non-autonomous class of differential equations [56]. Hence, it is urgent establish some new criteria on FXTS.
Motivated by the above discussion, this article deals with the FTSB and FXTSB problems for a lower order and high-order class of delayed BAM NNs. The main aim of this paper is to design a control low able to stabilize in finite time and fixed time the high-order delayed BAM NNs and to obtain a time convergent more accurate and with a high-precision.
The rest of this article is organized as follows. The FTSB and FXTSB of high-order BAM NNs is discussed in Sect. 3 where some sufficient general conditions are included in the control low and two kinds of controller are designed which include a delayed feedback control and a free-delay controller. Then, two numerical examples with graphical illustration are given to appear the effectiveness of our main results in Sect. 4. Finally, some concluding remarks are drawn in Sect. 5.
2 Preliminaries
Throughout this article, the following notations are used.
-
\(\mathbf {C([a,~b],~\mathbb {R}^n)}\) denotes the space formed by the continuous functions \(\phi ~:[a,~b]\rightarrow \mathbb {R}^n\) equipped with uniform norm as follows: \(\Vert \phi \Vert =\sup \nolimits _{a\le s\le b}\Vert \phi (s)\Vert \);
-
\(\langle .,~.\rangle \) stands for the inner product of Euclidean space.
-
For any vector \(x = (x_1,\ldots , x_n)^T\in \mathbb {R}^n\), we define \(Sign(x) = (sign(x_1), \ldots , sign(x_n))^T\);
-
a function \(\nu ~: \mathbb {R}_+\rightarrow \mathbb {R}_+\) is radially unbounded if \(\nu (x)\rightarrow +\infty \), as \(\Vert x\Vert \rightarrow +\infty \);
We also introduce the following assumptions:
-
\((\mathbf {H_1})\): There exist positive constants \(L_i^{f_k},~L_j^{g_{k}},~ k=1,2.\) such that
$$\begin{aligned} \frac{\left| f^{(1)}_{i}(x)-f^{(1)}_{i}(y)\right| }{|x-y|}&\le L_i^{f_1},\quad \frac{\left| f^{(2)}_{j}(x)-f^{(2)}_{j}(y)\right| }{|x-y|}\le L_j^{f_2};\\ \frac{\left| g^{(1)}_{i}(x)-g^{(1)}_{i}(y)\right| }{|x-y|}&\le L_i^{g_1},\quad \frac{\left| g^{(2)}_{j}(x)-g^{(2)}_{j}(y)\right| }{|x-y|}\le L_j^{g_2}. \end{aligned}$$for all \(x,~y\in \mathbb {R}\) and \(1\le i,j\le n\).
-
\((\mathbf {H_2})\): For all \(1\le i\le n,\)
$$\begin{aligned} f^{(1)}_{i}(0)=g^{(1)}_{i}(0)=f^{(2)}_{i}(0)=g^{(2)}_{i}(0)=0 \end{aligned}$$and
$$\begin{aligned} \left| f^{(1)}_{i}(x)\right|<F^1_{i},~\left| f^{(2)}_{i}(x)\right|<F^2_{i},~\left| g^{(1)}_{i}(x)\right|<G^1_{i},~\left| g^{(2)}_{i}(x)\right| <G^2_{i}. \end{aligned}$$ -
\((\mathbf {H_3})\): For any positive definite matrix P, \(P\bar{B}_i,~i=1,2\) are \(n\times n\) diagonal positive definite matrix where \(\bar{B}_1=\left( B_1+\varGamma ^TT^*\right) \), \(\bar{B}_2=\left( B_2+\varTheta ^TO^*\right) \).
2.1 Model Description
Let \(\mu ^*=(\mu _1^*,~\ldots ,~\mu _n^*)^T\) and \(\nu ^*=(\nu _1^*,~\ldots ,~\nu _n^*)^T\) be an equilibrium point of System (1), by a simple transformation \(x(t) = \mu (t)-\mu ^*\) and \(y(t) = \nu (t)-\nu ^*\), we can shift the equilibrium point \((\mu ^*,\nu ^*)^T\) to the origin and system (1) can be turned into the \((x-y)\) form (see [43])
where
We will use System (2) for the proof of the main results of our article.
2.2 Definitions and Lemmas
Now, we recall some useful lemmas and definitions in what follows.
Lemma 1
([15]) For a positive definite matrix \(Q\in \mathbb {R}^{n\times n}\) and any vectors \(x,~y\in \mathbb {R}^n\) and \(\epsilon >0\), the following inequality holds:
Lemma 2
([18]) If \(a_1,\ldots ,a_n,~r_1,~r_2\in \mathbb {R}\) with \(0<r_1<r_2,\) then the following inequality holds
Lemma 3
([64]) If \(b_i\ge ,~i=1,\ldots ,n\) and \(\delta >1\) then the following inequality holds
Let \(\varOmega _1\) and \(\varOmega _2\) be two open subsets of \(C\left( [-\bar{\tau },~0]\right) \) and \(C\left( [-\bar{\sigma },~0]\right) \) respectively such that \(0\in \varOmega _1\cap \varOmega _2 \).
Now, we introduce the notion of finite time stability and fixed time stability.
Definition 1
([48]): The zero equilibrium point of System (1) is finite time stable (FTS) if:
-
(i)
The equilibrium of System (1) is Lyapunov stable;
-
(ii)
For any state \(\phi (.)\in \varOmega _1,\) and \(\psi (.)\in \varOmega _2,\) there exists \(0\le T(\phi ,\psi )<+\infty \) such that every solution of System (1) satisfies \(x(t,~\phi )=y(t,~\psi )=0\) for all \(t\ge T(\phi ,\psi ).\)
The functional:
is called the settling time of System (1).
Lemma 4
([48]) Consider the non autonomous System
with uniqueness of solutions in forward time. If there exist two functions \(\nu \) and r of class \(\mathscr {K}\) and a continuous functional \(V:~\varOmega \rightarrow \mathbb {R}_+\) such that
-
(i)
\(\nu \left( \Vert \phi (0\Vert \right) \le V(\phi );\)
-
(ii)
\(D^+V(\phi )\le -r\left( V(\phi )\right) \) with
$$\begin{aligned} \int \limits _0^\epsilon \frac{dz}{r(z)}<\infty ,\quad \forall \epsilon >0,\quad ~\phi \in \varOmega . \end{aligned}$$
then, System (3) is FTS with a settling time satisfying the inequality
In particular, if \(r(V)=\lambda V^\rho \) where \(\lambda >0,~\rho \in (0,~1),\) then the settling time satisfies the inequality
Definition 2
([55]) The origin of System (1) is said to be fixed time stable if it is FTS and the settling time function \(T_0(\phi )\) is bounded for any \(\phi \in \mathbb {R}^n\), i.e., there exists \(T_{\max }>0\) such that \(T(\phi )\le T_{\max }\) for all \(\phi \in \mathbb {R}^n\).
Lemma 5
([55]) If there exist a continuous, positive definite and radially unbounded functional \(V:~\varOmega \rightarrow \mathbb {R}_+\) such that any solution z(.) of System (1) satisfies
with \(a,b,\delta ,\theta ,k>0\) and \(\delta k>1,~\theta k<1\), then the origin of System (1) is fixed time stable, and the settling time \(T(\phi )\) is estimated by
Lemma 6
([55]) If there exist a continuous, positive definite and radially unbounded functional \(V:~\varOmega \rightarrow \mathbb {R}_+\) such that any solution z(.) of System (1) satisfies
with \(a,b,\delta ,k>0\) and \(\delta k>1\), then the origin of System (1) is fixed time stable, and the settling time \(T(\phi )\) is estimated by
3 Main Results
In this section, firstly some sufficient general conditions for the FTSB of the target NNs are established and some new kinds of finite time controller are designed, besides, the problem of fixed time stabilization is solved and a high-precision of the settling time is obtained.
Now, we consider the following state feedback control:
where
3.1 Finite Time Stabilization
In the following Theorem, for the first time, sufficient general conditions on the state feedback control are designed to ensure the FTSB of System (1).
Theorem 1
Under assumptions \(\mathbf {(H_1)-(H_2)}\), if there exist symmetric positive matrices \(P,Q_j>0,~j=1,\ldots 4\) and constants \(\epsilon _i>0,~0<\delta _i<1,~i=1,2,~\), \(0\le \mu <1\) such that
then the controller (7) stabilize in finite time System (2) with
where \(\delta =\min \{\delta _1,\delta _2\}\).
Proof
Let the following Lyapunov function:
Taking the derivative of (14) along the solutions of System (1), we have
From Lemma 1, the following inequality holds:
and
Combining with (8)–(13), and (15)–(17) we deduce that
Since \(0<\mu <1\), from Lemmas 2 and 3, we get the following inequalities:
and consequently \(\dot{V}(t)\le -r\big (V(t)\big )\) where
Since
Based on Lemma 4, we deduce that System (1) is FTSB and the settling time satisfies
\(\square \)
Remark 1
The conditions established in Theorem 1 are in the general form and it was necessary to find a correspondent form of the control which satisfied them. In other words, the challenge is to find a correspondent FTS controller that makes these conditions easy to get them. In our paper, under assumptions \((H1-H3)\), we design different kinds of controller which renders these general conditions in the form of standard LMIs where we can easily solve them by using MATLAB LMI toolbox.
It should be pointed out that to the best of the author’s knowledge, there have been no results focused on the FTSB ones and the FXTSB for high-order BAM NNs with time varying coefficients. The approach used here can also be applied to study the FTSB for some other models of NNs, such as BAM Cohen–Grossberg NNs.
In the following, an explicit state feedback control will be designed.
Theorem 2
Under assumptions \(\mathbf {(H_1)-(H_3)}\), if there exist positive constants \(\epsilon _i>0,~i=1,2,~\)\(k_1,~\rho _1>0,~0\le \mu <1\) and three symmetric positives matrices \(P,~Q_1,~Q_3\), such that
Then, System (1) is FTSB via controller (23) as follows:
and the settling time satisfies
with \(\alpha =\min \{k_2,\rho _2\}\)
Proof
Note that
and
It then follows from \(\mathbf {(H_1)}\) that
and
Thus, by choosing \(\delta _1=2k_2 \lambda _{\min }(P),~\delta _2= 2\rho _2\lambda _{\min }(P),~Q_2=2k_1I\), and \(Q_4=2\rho _1I\), (10)–(13) holds and \(T_0(\phi ,\psi )\) satisfies (24) which achieves the proof. \(\square \)
Remark 2
It is possible to use more complex Lyapunov functions. However, when we use more complex Lyapunov functions during the study of the FTS, it is necessary to consider \(\Vert .\Vert _1\) ([12]). Unfortunately, \(\Vert .\Vert _1 \ge \Vert .\Vert _2\), and then the settling time established by using the complex Lyapunov functions may be larger than that obtained based on the Lyapunov–Krasovskii functional.
If we set \(P = pI_n\), we obtain the following Corollary where the settling time is much simpler.
Corollary 1
If there exist constants \(\epsilon _i>0,~i=1,2.,~0\le \mu <1,k_1>0,~\rho _1,~p>0\) such that
then System (1)–(23) is FTS and
In the following proposition, some sufficient conditions in form of LMIs where the control strength are constructed simultaneously are established.
Proposition 1
If there exist constants \(\epsilon _i>0,~i=1,2.,~0\le \mu <1,k_1>0,~\rho _1,~p>0\) such that
with \(\varPsi _{11}=-p(C+C^T)-2kI\), \(\varPsi _{44}=-p(D+D^T)-2\rho I\), \(k_1=p^{-1}k,~\rho _1=p^{-1}\rho \). then System (1) is FTSB via the controller (23) and the settling time satisfies (27).
Proof
Let
and
By pre and post multiplying the inequalities (25) and (26) by \(diag(I_n,\frac{1}{\sqrt{\epsilon _1}}I_n,\frac{1}{\sqrt{\epsilon _1}}I_n)\) and , \(diag(I_n,\frac{1}{\sqrt{\epsilon _2}}I_n,\frac{1}{\sqrt{\epsilon _1}}I_n)\) respectively, we obtain from Shur copmlement lemma [16] that \(\varXi _1<0\) and \(\varXi _2<0\), is equivalent respectively to (25) and (26). Since \(\varPsi =diag(\varXi _1,~\varXi _2)<0\), we obtain immediately the result of Corollary 1. \(\square \)
Remark 3
Since \(L_2\subset L_1\), the settling-time established here may be smaller than that considered in the existing literature. In addition, compared with other approach based on the same approach, obviously, the conditions of Corollary 1 are less conservative than that presented in [69, 70] thanks to a positive scalar p added in the Lyapunov function. On the other hand, it should be pointed out that the LKF given in [64] is independent of a matrix P. For reducing the conservatism of conditions, we introduce the matrix P in (14) without influencing on the upper bound \(T(\phi )\).
In the following Corollary a free-delay controller is designed to ensure the FTSB of delayed BAM NNs.
Corollary 2
Under conditions of Theorem 2, System (1) is FTSB via free-delay controller as follows:
and the settling-time satisfies (27).
Proof
By applying \(\mathbf {(H_2)}\) to (10)–(11). The proof will be similar to the proof of Theorem 2.\(\square \)
Remark 4
It is possible to shorten the settling-time based on the approach used in [39]
-
Let the control strength \(r_2=\max \{k_2,\rho _2\}\) be fixed and let
$$\begin{aligned} T_0(\mu )=\frac{2\left( \Vert \phi \Vert +\Vert \psi \Vert \right) ^{1-\mu }}{r_2(1-\mu )}, \quad 0\le \mu <1,~r_2>0;. \end{aligned}$$(32)Since
$$\begin{aligned} \frac{dT_0^*}{d\mu }=\frac{2\left( \Vert \phi \Vert +\Vert \psi \Vert \right) ^{1-\mu }\left[ (\mu -1)\ln \left( \Vert \phi \Vert +\Vert \psi \Vert \right) +1\right] }{r_2(1-\mu )^2} \end{aligned}$$
therefore,
-
If \(\left( \Vert \phi \Vert +\Vert \psi \Vert \right) <e\) i.e. \(\ln \left( \Vert \phi \Vert +\Vert \psi \Vert \right) ^{1-\mu }<1\) then \(T_0^*(\mu )\) is strictly increasing for \(0<\mu <1\). Obviously, \(T_0^*(\mu )\) achieves the minimum in \(\mu =0\)
-
Similarly, if \(\left( \Vert \phi \Vert +\Vert \psi \Vert \right) >e\), \(T_0^*(\mu )\) has only one critical point \(u^*=1-\frac{1}{\ln \left( \Vert \phi \Vert +\Vert \psi \Vert \right) }\) at which achieves its minimum value \(\frac{2 e \ln \left( \Vert \phi \Vert +\Vert \psi \Vert \right) }{r_2}\)
Therefore, the following switched controller can be designed for optimizing the settling-time
3.2 Fixed Time Stabilization
In this part, we develop some results on the FXTSB of System (1) where we design different kinds of controller able to ensure the FXTS of the considered class of NNs. Also, the settling time is estimated where a high precision is obtained.
Theorem 3
Under assumptions \(\mathbf {(H_1)-(H_2)}\) and conditions (8)–(11), if there exist symmetric positive matrices \(P,Q_j>0,~j=1,\ldots 4\) and positive constants \(\epsilon _i>0,~\delta _i<1,~i=1,2~\)\(0\le \mu <1\) such that
then the closed-loop System (2)–(7) is FXTS and the settling time satisfies
Proof
Calculating the derivative of (14) along the trajectories of System (1), similarly to proof of Theorem 1 we obtain that
Since \(\beta >1\), from Lemmas 2 and 3, we obtain that:
Therefore from (19) and (39) we have
Therefore, based on Lemma 5, we obtain that the closed-loop system (1)–(7) is fixed time stable and \(T_0(\phi )\) satisfies (37). \(\square \)
Remark 5
This is the first time to study the FXTSB of System (1) for the both cases: lower-order and high-order. Moreover, in Theorem 1 only the FTS is investigated and the established settling time is not of major interest in practice when the initial conditions will be large which is removed in Theorem 2 by establishing a settling time independent of initial conditions and more accurate.
In the following Proposition a practical design procedure for the control strengths \(\rho _i\) and \(k_i\), \(i=1,2,3\) is given based on the LMIs approach.
Proposition 2
Under assumptions \(\mathbf {(H_1)-(H_3)}\), if there exist positive constants \(p,~\epsilon _i>0,~i=1,2,~\)\(k_1,~\rho _1>0,~0\le \mu <1\), \(\beta >1\) such that the following LMI holds
with \(\varPsi _{11}=-2pC-2kI\), \(\varPsi _{44}=-2pD-2\rho I\), \(k_1=p^{-1}k,~\rho _1=p^{-1}\rho \). Then, System (1)–(42) is FXTS via controller (42) as follows:
and the settling time satisfies
Proof
By letting
and
Similarly to the proof of Theorem 2, by choosing \(P=pI_n\)\(\delta _1=2\lambda _{\min }(P)\min \{ k_2 p,~k_3p\}\), \(\delta _2= 2\lambda _{\min }(P)\min \{\rho _2p,~\rho _3p\}\), \(Q_2=2k_1I\), and \(Q_4=2\rho _1I\) , the inequalities (10)–(11) and (35)–(36) hold. Furthermore, from Corollary 1, (8)–(9) are equivalent to condition (41). Therefore, the conditions of Theorem 3 are satisfied which achieves the proof. \(\square \)
In the following Corollary a free-delay controller is presented which is well suitable in practice.
Corollary 3
Under assumptions \(\mathbf {(H_1)-(H_3)}\), if there exist positive constants \(p,~\epsilon _i>0,~i=1,2,~\)\(k_1,~\rho _1>0,~0\le \mu <1\), \(\beta >1\) such that the following LMI holds
with \(\varPsi _{11}=-2pC-2kI\), \(\varPsi _{44}=-2pD-2\rho I\), \(k_1=p^{-1}k,~\rho _1=p^{-1}\rho \). Then, System (1)–(42) is FXTS via free-delay controller (45) as follows:
and the settling time satisfies (43)
Proof
By using \(\mathbf {(H_2)}\) similar arguments to the ones of Corollary 2, we obtain easily the result.\(\square \)
In the following Theorem, some new general conditions for the fixed time stabilization are designed where the obtained settling time is more precise than that given in Theorem 1.
Theorem 4
Under assumptions \(\mathbf {(H_1)-(H_2)}\) and conditions (8)–(11), if there exist symmetric positive matrices \(P,Q_j>0,~j=1,\ldots 4\) and positive constants \(\lambda _i\), \(\epsilon _i>0,~\delta _i<1,~i=1,2,~\), \(0\le \mu <1\) such that
then the closed-loop System (2)–(7) is FXTS and the settling time satisfies
Proof
Consider the same Lyapunov functional (14), similarly to the proof of Theorem 1 we obtain that
Therefore, from Lemma 6 System (1)–(7) is stable in fixed time and \(T_0(\phi )\le T_{\max }^2\). \(\square \)
Based on the results obtained in [20], Theorem 4 complement end extend the recent works around the fixed time stabilization of delayed NNs by establishing a settling time more accurate than that given in the literature. In the following Proposition, an explicitly fixed time controller with a high-precision of a settling time is established
Proposition 3
Under assumptions \(\mathbf {(H_1)-(H_3)}\), if there exist positive constants \(p,~\epsilon _i>0,~i=1,2,~\)\(k_1,~\rho _1>0,~0\le \mu <1\), \(\beta >1\) such that the following LMI holds
with \(\varPsi _{11}=-2pC-2kI\), \(\varPsi _{44}=-2pD-2\rho I\), \(k_1=p^{-1}k,~\rho _1=p^{-1}\rho \). Then, System (1)–(42) is FXTS via controller (50) as follows:
where \(\lambda _i,~i=1,2,~k_3,\rho _3\) are positive constants and \(\lambda =\min \{\lambda _1,\lambda _2\}\), \(\alpha _3=\min \{k_3,~\rho _3\}\). and the settling time satisfies
Proof
Let \(P=pI_n\), the proof of proposition 3 is similar to the one of Corollary 1 so it is omitted here. \(\square \)
Remark 6
The criterion considered in [1, 2, 23,24,25, 28, 73] that ensures the stability of System (1) fails when the function \(\tau (.)\) is not differentiable. The results investigated here overcome these difficulties and extended the existing results to a class of NNs with unknown time-varying delay. In the following Corollary, a free-delay fixed time controller is deduced for better application
Corollary 4
Under conditions of Corollary 3 System (1)–(52) is FXTS via free-delay controller (52) as follows:
and the settling time satisfies (51).
Proof
According to Theorem 4, if we apply the fixed time controller to System (1) then we can easily obtain the result. The details of the proof is left to the reader. \(\square \)
Remark 7
As we known,the same routine as the conventional delayed NNs cannot be utilized to establish sufficient conditions for the FTSB of delayed NNs in the form of LMIs. In fact, the constructed controller in [45, 46] cannot be establish some sufficient LMIs conditions for the the FXTSB. More precisely, with the requirement \(\mu \in ]0,1[\), it is difficult to establish LMIs conditions for the Fixed time stabilization of delayed NNs based on the inequality \(\dot{V}(t)\le - V^\mu -\gamma V^\beta \) . In our paper, based on the Lyapunov-quadratic functional, some FXTSB conditions in the form of LMIs are obtained for the first time.
4 Application
In this section, two numerical examples are designed to appear the effectiveness of our theoretical main results
4.1 Delay-Dependant Controller
Consider the following BAM delayed NNs
where
and
By using Matlab LMI toolbox [42] for solving (28), we obtain some feasible solutions
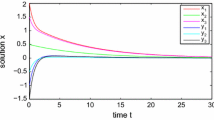
Hence, from Corollary 1, if we fix \(k_2=\rho _2=2\), system (53) is FTSB via controller (54) as follows.
We plot the state trajectories of System (53) with the initial condition \(y(s)=\phi (s)=-3\), \(x(s)=\psi (s)=3\) for all \(s\in [-3,0)\) without controller and under controller (54) in Fig. 1.

Remark 8
Many authors studied the global asymptotic stability and exponential stability of System (1) [1, 2, 23, 25]. From Corollary 1, we guarantee the FTSB of System (1) with the initial condition \(y(s)=\phi (s)=-3\), \(x(s)=\psi (s)=3\) for all \(s\in [-3,0)\) via controller (54) with an information about the time for the system to achieve the equilibrium point given by the settling time functional
where \(\mu =0.5\).
The approach used in [40] fails for System (53) because \(\tau (.)\ne 0\). However, our approach can be stabilize in finite time the class of BAM neural networks in the presence of delay. It should be pointed out that delayed systems have more complex dynamic behaviours compared with systems without delay because it is delicate to design a Lyapunov functional satisfying the derivative condition for FTS of delayed system.
When the initial conditions will be large, on one hand, the established settling time is not of major interest in practice because the knowledge in advance of the initial conditions is very difficult. Motivated by the above-mentioned discussion, we design a fixed time controller where the settling time is independent of initial conditions. In fact, from Corollary 2, if we fix \(k_i=\rho _i=1,~i=2,3\), System (53) is stable in fixed time via controller (55) as follows:
Corollary 2 guarantees the Fixed time stability of the closed-loop system (53)–(55) but also the following inequality for the settling-time functional
when \(\mu =0.5\) and \(\beta =2\).
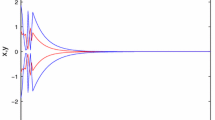
When we fix \(\lambda _1=\lambda _2=0.28\), Corollary 3 can optimize the settling time of System (53) via controller (56) as follows:
where the settling-time functional
State trajectories of System (53) with initial condition \((6,-5)^T\) with controller (55) and (56) are depicted in Fig. 2.

Remark 9
The concept of FTS invetigated in our paper is based on the classical Lyapunov stability which is associated with an infinite time interval. However, in [7] , only a finite time interval is considered. Dorato reported in [3] that FTB and Lyapunov stability invetigated in our paper are two independent concepts.
4.2 Free-Delay Controller
Now, we consider the following High-order BAM Hopfield NNs
where
and the rest of parameters similar to Sect. 4.1.
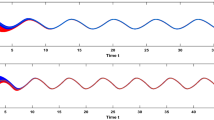
From Corollary 2, the equilibrium point of System (57) is FTSB via controller (59) as follows:
and the settling-time satisfies \(T(\phi ,\psi )\le 4\). when we fix \(k_2=\rho _2=2\). We plot the state trajectories of System (57) without and under controller (59) in Fig. 3.

On the one hand, the following controller (60)
can be ensure the fixed time stabilization of System (57).
On the other hand, from corollary 4, the following controller (61)
can be also ensure the fixed time stability with a high-precision of the settling time such as \(T^2_{\max } \le 2.98\).
We plot the state trajectories of System (57) with controller (60) and (61) in Fig. 4.

5 Conclusion and Future Work
Finite time and fixed time stabilization problems for a high-order class of BAM neural networks with time-varying delay is solved. On the one hand, some new general conditions for the FTSB and FXTSB are established. These conditions are in the form of LMIs which can be numerically checked. On the other hand, different kinds of finite time and fixed time control algorithms which contain time delay dependent controller and free-delay controller are designed. Moreover, for the first time, the fixed-settling time is optimized for delayed systems and a high precision for this time is obtained. Compared with the recent work, firstly, we extend the results given in [14, 40, 57, 59, 64, 65] where only the FTSB problem is deals and the fixed time is not considered. Secondly, our approach complement the results of [40] where the time-delay is not taken into account and the fixed time stability is not treated. Thirdly, our analysis offers an improvement compared with [22, 24, 30, 34, 51,52,53,54, 58] where only asymptotic stability concept of high-order BAM neural networks is investigated.
It is well known that the effect of impulses on stabilization is rather scarce, and the topic certainly deserves to be further investigated. At present many research around the impulsive effect on the stabilization of NNs such that the mode-dependent impulsive investigated in [71] and some sufficient conditions are established in [72] that ensure the synchronization of NNs with heterogeneous impulses. However, the approach used in the above mentioned work cannot be extended to solve the problem investigated in our paper. Thus, a variety of impulses will be a real problem to be studied in the near future work. Furthermore, in future work, we would like to extend our results to the BAM neural networks with various kinds of delays, such as infinite distributed delay, time-varying delay in the leakage term, neutral class of delayed NNS. In a word, the BAM neural networks still has some open problems.
References
Ali MS, Meenakshi K, Gunasekaran N (2017) Finite-time \(H_\infty \) boundedness of discrete-time neural networks normbounded disturbances with time-varying delay. Int J Control Autom Syst 15(6):2681–2689
Ali MS, Meenakshi K, Gunasekaran N, Murugan K (2018) Dissipativity analysis of discrete-time markovian jumping neural networks with time-varying delays. J Differ Equ Appl 24(6):859–871
Amato F, Ariola M, Dorato P (2001) Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 37(9):1459–1463
Aouiti C (2016) Neutral impulsive shunting inhibitory cellular neural networks with time-varying coefficients and leakage delays. Cogn Neurodynamics 10(6):573–591
Aouiti C, Alimi AM, Karray F, Maalej A (2005) The design of beta basis function neural network and beta fuzzy systems by a hierarchical genetic algorithm. Fuzzy Sets Syst 154(2):251–274
Aouiti C, Alimi AM, Maalej A (2002) A genetic-designed beta basis function neural network for multi-variable functions approximation. Syst Anal Modell Simul 42(7):975–1009
Aouiti C, Coirault P, Miaadi F, Moulay E (2017) Finite time boundedness of neutral high-order Hopfield neural networks with time delay in the leakage term and mixed time delays. Neurocomputing 260:378–392
Aouiti C, Gharbia IB, Cao J, M’hamdi MS, Alsaedi A (2018) Existence and global exponential stability of pseudo almost periodic solution for neutral delay bam neural networks with time-varying delay in leakage terms. Chaos Solitons Fractals 107:111–127
Aouiti C, M’hamdi MS, Cao J, Alsaedi A (2017) Piecewise pseudo almost periodic solution for impulsive generalised high-order Hopfield neural networks with leakage delays. Neural Process Lett 45(2):615–648
Aouiti C, M’hamdi MS, Chérif F (2017) New results for impulsiverecurrent neural networks with time-varying coefficients and mixeddelays. Neural Process Lett 46(2):487–506
Aouiti C, MS M’hamdi, Touati A (2016) Pseudo almost automorphic solutions of recurrent neural networks with time-varying coefficients and mixed delays. Neural Process Lett 45(1):121–140
Aouiti C, Miaadi F (2018) Finite-time stabilization of neutral Hopfield neural networks with mixed delays. Neural Process Lett. https://doi.org/10.1007/s11063-018-9791-y
Aouiti C, Miaadi F (2018) Pullback attractor for neutral Hopfield neural networks with time delay in the leakage term and mixed time delays. Neural Comput Appl. https://doi.org/10.1007/s00521-017-3314-z
Baskar P, Padmanabhan S, Ali MS (2018) Finite-time \(H_\infty \) control for a class of markovian jumping neural networks with distributed time varying delays-LMI approach. Acta Math Sci 38(2):561–579
Berman A, Plemmons RJ (1994) Nonnegative matrices in the mathematical sciences, vol 9. Classics in applied mathematics. SIAM, Philadelphia
Boyd SP, El Ghaoui L, Feron E, Balakrishnan V (1994) Linear matrix inequalities in system and control theory, vol 15. SIAM, Philadelphia
Gao J, Zhu P, Xiong W, Cao J, Zhang L (2016) Asymptotic synchronization for stochastic memristor-based neural networks with noise disturbance. J Frankl Inst 353(13):3271–3289
Hardy GH, Littlewood JE, Pólya G (1952) Inequalities. Cambridge University Press, Cambridge
Hong Y, Jiang ZP (2006) Finite-time stabilization of nonlinear systems with parametric and dynamic uncertainties. IEEE Trans Autom Control 51(12):1950–1956
Hu C, Yu J, Chen Z, Jiang H, Huang T (2017) Fixed-time stability of dynamical systems and fixed-time synchronization of coupled discontinuous neural networks. Neural Netw 89:74–83
Kosko B (1988) Bidirectional associative memories. IEEE Trans Syst Man Cybern 18(1):49–60
Kwon O, Lee SM, Park JH, Cha EJ (2012) New approaches on stability criteria for neural networks with interval time-varying delays. Appl Math Comput 218(19):9953–9964
Kwon O, Park JH, Lee S, Cha E (2014) New augmented Lyapunov–Krasovskii functional approach to stability analysis of neural networks with time-varying delays. Nonlinear Dyn 76(1):221–236
Kwon O, Park JH, Lee SM, Cha EJ (2013) Analysis on delay-dependent stability for neural networks with time-varying delays. Neurocomputing 103:114–120
Kwon O, Park M, Park JH, Lee S, Cha E (2013) Passivity analysis of uncertain neural networks with mixed time-varying delays. Nonlinear Dyn 73(4):2175–2189
Li X, Bohner M, Wang CK (2015) Impulsive differential equations: periodic solutions and applications. Automatica 52:173–178
Li X, Cao J (2017) An impulsive delay inequality involving unbounded time-varying delay and applications. IEEE Trans Autom Control 62(7):3618–3625
Li X, Ding Y (2017) Razumikhin-type theorems for time-delay systems with persistent impulses. Syst Control Lett 107:22–27
Li X, Fu X (2013) Effect of leakage time-varying delay on stability of nonlinear differential systems. J Frankl Inst 350(6):1335–1344
Li X, Liu B, Wu J (2018) Sufficient stability conditions of nonlinear differential systems under impulsive control with state-dependent delay. IEEE Trans Autom Control 63(1):306–311
Li X, Rakkiyappan R, Sakthivel N (2015) Non-fragile synchronization control for markovian jumping complex dynamical networks with probabilistic time-varying coupling delays. Asian J Control 17(5):1678–1695
Li X, Song S (2013) Impulsive control for existence, uniqueness, and global stability of periodic solutions of recurrent neural networks with discrete and continuously distributed delays. IEEE Trans Neural Netw Learn Syst 24(6):868–877
Li X, Song S (2017) Stabilization of delay systems: delay-dependent impulsive control. IEEE Trans Autom Control 62(1):406–411
Li X, Song S, Wu J (2018) Impulsive control of unstable neural networks with unbounded time-varying delays. Sci China Inf Sci 61(1):012–203
Li X, Wu J (2016) Stability of nonlinear differential systems with state-dependent delayed impulses. Automatica 64:63–69
Li X, Zhang X, Song S (2017) Effect of delayed impulses on input-to-state stability of nonlinear systems. Automatica 76:378–382
Li Y, Yang L, Wu W (2010) Periodic solutions for a class of fuzzy BAM neural networks with distributed delays and variable coefficients. Int J Bifurc Chaos 20(05):1551–1565
Liu X, Chen T (2018) Finite-time and fixed-time cluster synchronization with or without pinning control. IEEE Trans Cybern 48(1):240–252
Liu X, Ho DW, Yu W, Cao J (2014) A new switching design to finite-time stabilization of nonlinear systems with applications to neural networks. Neural Netw 57:94–102
Liu X, Jiang N, Cao J, Wang S, Wang Z (2013) Finite-time stochastic stabilization for BAM neural networks with uncertainties. J Frankl Inst 350(8):2109–2123
Liu X, Park JH, Jiang N, Cao J (2014) Nonsmooth finite-time stabilization of neural networks with discontinuous activations. Neural Netw 52:25–32
Lofberg J (2004) Yalmip: a toolbox for modeling and optimization in matlab. In: 2004 IEEE international symposium on computer aided control systems design, pp. 284–289
Lou XY, Cui BT (2007) Novel global stability criteria for high-order Hopfield-type neural networks with time-varying delays. J Math Anal Appl 330(1):144–158
Lu J, Ding C, Lou J, Cao J (2015) Outer synchronization of partially coupled dynamical networks via pinning impulsive controllers. J Frankl Inst 352(11):5024–5041
Lu J, Ho DW, Wang Z (2009) Pinning stabilization of linearly coupled stochastic neural networks via minimum number of controllers. IEEE Trans Neural Netw 20(10):1617–1629
Lu J, Wang Z, Cao J, Ho DW, Kurths J (2012) Pinning impulsive stabilization of nonlinear dynamical networks with time-varying delay. Int J Bifurc Chaos 22(07):1250–1276
Menard T, Moulay E, Perruquetti W (2017) Fixed-time observer with simple gains for uncertain systems. Automatica 81:438–446
Moulay E, Dambrine M, Yeganefar N, Perruquetti W (2008) Finite-time stability and stabilization of time-delay systems. Syst Control Lett 57(7):561–566
Moulay E, Perruquetti W (2006) Finite time stability and stabilization of a class of continuous systems. J Math Anal Appl 323(2):1430–1443
Ni J, Liu L, Liu C, Hu X, Li S (2017) Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans Circuits Syst II Express Briefs 64(2):151–155
Park JH (2006) A novel criterion for global asymptotic stability of BAM neural networks with time delays. Chaos Solitons Fractals 29(2):446–453
Park JH (2006) Robust stability of bidirectional associative memory neural networks with time delays. Phys Lett A 349(6):494–499
Park JH, Park C, Kwon O, Lee SM (2008) A new stability criterion for bidirectional associative memory neural networks of neutral-type. Appl Math Comput 199(2):716–722
Peng W, Wu Q, Zhang Z (2016) LMI-based global exponential stability of equilibrium point for neutral delayed BAM neural networks with delays in leakage terms via new inequality technique. Neurocomputing 199:103–113
Polyakov A (2012) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Polyakov A, Efimov D, Perruquetti W (2015) Finite-time and fixed-time stabilization: implicit Lyapunov function approach. Automatica 51:332–340
Saravanan S, Ali MS (2018) Improved results on finite-time stability analysis of neural networks with time-varying delays. J Dyn Syst Meas Control 140(10):101–103
Şaylı M, Yılmaz E (2014) Global robust asymptotic stability of variable-time impulsive BAM neural networks. Neural Netw 60:67–73
Shen H, Park JH, Wu ZG (2014) Finite-time reliable \(L_2/L_\infty \)-control for takagi-sugeno fuzzy systems with actuator faults. IET Control Theory Appl 8(9):688–696
Shen H, Park JH, Wu ZG (2014) Finite-time synchronization control for uncertain markov jump neural networks with input constraints. Nonlinear Dyn 77(4):1709–1720
Shen J, Cao J (2011) Finite-time synchronization of coupled neural networks via discontinuous controllers. Cognitive Neurodynamics 5(4):373–385
Stamova I, Stamov T, Li X (2014) Global exponential stability of a class of impulsive cellular neural networks with supremums. Int J Adapt Control Signal Process 28(11):1227–1239
Wang F, Liu M (2016) Global exponential stability of high-order bidirectional associative memory (BAM) neural networks with time delays in leakage terms. Neurocomputing 177:515–528
Wang L, Shen Y (2015) Finite-time stabilizability and instabilizability of delayed memristive neural networks with nonlinear discontinuous controller. IEEE Trans Neural Netw Learn Syst 26(11):2914–2924
Wang L, Shen Y, Ding Z (2015) Finite time stabilization of delayed neural networks. Neural Netw 70:74–80
Wang L, Shen Y, Sheng Y (2016) Finite-time robust stabilization of uncertain delayed neural networks with discontinuous activations via delayed feedback control. Neural Netw 76:46–54
Wu Y, Cao J, Alofi A, Abdullah AM, Elaiw A (2015) Finite-time boundedness and stabilization of uncertain switched neural networks with time-varying delay. Neural Netw 69:135–143
Xia Y, Cao J, Lin M (2007) New results on the existence and uniqueness of almost periodic solution for BAM neural networks with continuously distributed delays. Chaos Solitons Fractals 31(4):928–936
Yang X, Cao J, Song Q, Xu C, Feng J (2017) Finite-time synchronization of coupled markovian discontinuous neural networks with mixed delays. Circuits Syst Signal Process 36(5):1860–1889
Yang X, Song Q, Liang J, He B (2015) Finite-time synchronization of coupled discontinuous neural networks with mixed delays and nonidentical perturbations. J Frankl Inst 352(10):4382–4406
Zhang W, Tang Y, Miao Q, Du W (2013) Exponential synchronization of coupled switched neural networks with mode-dependent impulsive effects. IEEE Trans Neural Netw Learn Syst 24(8):1316–1326
Zhang W, Tang Y, Wu X, Fang JA (2014) Synchronization of nonlinear dynamical networks with heterogeneous impulses. IEEE Trans Circuits Syst I Regular Pap 61(4):1220–1228
Zhang X, Lv X, Li X (2017) Sampled-data-based lag synchronization of chaotic delayed neural networks with impulsive control. Nonlinear Dyn 90(3):2199–2207
Zhang Z, Liu K (2011) Existence and global exponential stability of a periodic solution to interval general bidirectional associative memory (BAM) neural networks with multiple delays on time scales. Neural Netw 24(5):427–439
Zheng B, Zhang Y, Zhang C (2008) Global existence of periodic solutions on a simplified BAM neural network model with delays. Chaos Solitons Fractals 37(5):1397–1408
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Aouiti, C., Li, X. & Miaadi, F. A New LMI Approach to Finite and Fixed Time Stabilization of High-Order Class of BAM Neural Networks with Time-Varying Delays. Neural Process Lett 50, 815–838 (2019). https://doi.org/10.1007/s11063-018-9939-9
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-018-9939-9