
Abstract
This paper concerned with the problem of observer-based adaptive fuzzy quantized tracking dynamic surface control (DSC) is investigated for the uncertain multi-input and multi-output (MIMO) nonstrict-feedback nonlinear systems, which contain unknown nonlinear functions, input quantization, and unmeasured states. By using fuzzy logic systems to identify the uncertain MIMO nonstrict-feedback nonlinear systems, a fuzzy state observer is introduced to estimate the immeasurable states. By transforming the hysteretic quantized input into a new nonlinear decomposition, and utilizing the DSC backstepping design method, a novel and less conservative fuzzy adaptive quantized tracking control approach is developed. It is shown that the proposed control scheme can guarantee the stability of the closed-loop system, and also that the system outputs can track the given desired trajectories. The simulation results are provided to verify the effectiveness of the proposed control strategy.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
It is well known that, in the past decade, based on the approximating capability of fuzzy logic systems or neural networks, many adaptive fuzzy and NN state feedback control design methods have been proposed for uncertain nonlinear systems in the strict-feedback form [1–12]. The authors in [1–8] presented several adaptive fuzzy or NN control schemes for uncertain MIMO nonlinear systems in strict-feedback form, in which the system model is different from the statements in [9, 10]. Meanwhile, authors in [11, 12] investigated adaptive fuzzy and NN decentralized control design problem for uncertain large-scale nonlinear systems in strict-feedback form. However, the above-mentioned control schemes are all required that the full-state information must be measurable. To relax the restriction in [1–12], the observer-based adaptive fuzzy and NN output-feedback control design problem has been developed, and many interesting research results have also been obtained [13–17], where the works in [13–15] are for a class of uncertain MIMO nonlinear systems and the works in [16, 17] are for a class of uncertain nonlinear interconnected systems.
It should be mentioned that all the aforementioned results are feasible under presupposition that the considered systems have a strict-feedback form or pure-feedback form. Therefore, they cannot be employed in controlling the uncertain nonlinear systems with nonstrict-feedback form. Recently, the control problem of the nonstrict-feedback systems has attracted a great deal of attention, for example in [18–23]. To overcome the difficulty in the traditional adaptive backstepping control design, by utilizing the monotonously increasing property of the bounding functions, authors in [18, 19] developed the variables separation technique, and subsequently proposed two adaptive fuzzy control design methods for single-input and single-output (SISO) and MIMO nonstrict-feedback nonlinear systems, respectively. Then in [20–22], authors proposed different control methods for SISO and MIMO nonstrict-feedback nonlinear systems with input nonlinearity. More recently, the observer-based adaptive NN output-feedback control schemes have been developed in [23, 24] for the SISO nonstrict-feedback nonlinear systems, and the immeasurable state problem of SISO nonstrict-feedback systems has been solved, but the situation of MIMO nonstrict-feedback nonlinear systems is not considered. And also the above-mentioned results are based on the assumption that the unknown functions must satisfy the monotonously increasing property of the bounding functions, which are not suitable for many practical engineering systems. Although the authors in [25] proposed an observer-based adaptive fuzzy control design method for SISO nonlinear system in nonstrict-feedback form, the proposed control method cannot be applied to control the MIMO nonstrict-feedback nonlinear systems considered in this paper. In addition, the controlled nonstrict-feedback nonlinear systems considered in [18–25] did not contain the input quantization.
As stated in [26–28], since many practical engineering systems contain the quantized control input, such as hydraulic systems, hybrid systems, and automotive networked control systems, it is necessary to investigate the control design problem for quantized systems. The work in [28] first proposed a control design method for nonlinear systems with the input quantization. By using backstepping design technique, the authors in [29] proposed the adaptive quantized control method for a class of SISO uncertain nonlinear systems in strict-feedback form. It should be pointed out that [28, 29] only considered the nonlinear uncertainties, and also the nonlinear functions are required to be known or can be linearly parameterized. To eliminate the above limitations, the authors in [30] presented a novel fuzzy adaptive controller for a class of stochastic nonlinear systems, and the authors in [31] extended the results in [30] to a class of uncertain switched nonlinear systems with unmeasured states. Although the results on the adaptive quantized control design have achieved some progress, the controlled plants in the above-mentioned results are strict-feedback nonlinear systems, and they cannot solve the control design problem for the nonlinear systems in nonstrict-feedback form.
Based on the above presentations, an observer-based adaptive fuzzy control problem is studied in this paper for MIMO nonstrict-feedback nonlinear systems. The considered uncertain MIMO nonstrict-feedback systems contain unmeasurable states, unknown nonlinearities, and input quantization. By utilizing fuzzy logic systems to identify the unknown nonlinear functions, a fuzzy state observer is constructed to obtain the unmeasurable states. By transforming the hysteretic quantized input into a new nonlinear decomposition and based on DSC control design, an observer-based adaptive fuzzy quantized control method is presented. It is proved that the closed-loop system is stable in the sense of Lyapunov function stability theory. Compared to the previous works, the following contributions are worth to be emphasized as follows.
-
1.
The adaptive fuzzy control scheme proposed in this paper has solved the unmeasured states and quantized input problems for MIMO nonstrict-feedback systems. Although the references [26–31] also investigated the input quantization design problem, they all required that the states must be available for measurement. Moreover, the controlled plants are SISO strict-feedback nonlinear systems, not the MIMO nonstrict-feedback systems under consideration in this study.
-
2.
The proposed adaptive quantized fuzzy control design method only utilizes the property of fuzzy basis functions, instead of the restrictive assumption in the literature [18–24] that the unknown functions must satisfy the monotonously increasing property of the bounding functions. Therefore, this paper has reduced the conservatism of the control schemes in [18–24].
-
3.
The proposed control scheme has overcome the problem of “explosion of complexity” by introducing into DSC technique into the fuzzy adaptive quantized control design. Therefore, the control structure of this paper is much simpler than those of the previous literature [18–30].
The rest of the paper is organized as follows: the problem formulations and preliminaries are present in Sect. 2. Adaptive quantized control design is given in Sect. 3. In Sect. 4, the simulation study is shown with the aim to validate the effectiveness of the proposed method. Section 5 contains the conclusion.
2 Problem formulation and preliminaries
2.1 System descriptions
Consider the uncertain MIMO nonstrict-feedback systems:
where u j ∊ R and y = [y 1, y 2, …, y n ]T ∊ R n are the input and output for the first jth subsystem, respectively, with u j-1 = [u 1, …, u j−1]T ∊ R j−1, and q j (u j ) ∊ ℜ is the output of the hysteresis quantizer; \(\underline{x}_{{j,i_{j} }} = [x_{j,1} , \ldots ,x_{{j,i_{j} }} ]^{\text{T}} \in R^{{i_{j} }}\), (j = 1, …, n, i j = 1, …, m j ), is the state vector of the first i j differential equations of the jth subsystem; \(d_{{j,i_{j} }} (t)\) is the external disturbance bounded by an unknown constant \(d_{{j,i_{j} }}^{*}\), i.e., \(\left| {d_{{j,i_{j} }} (t)} \right| \le d_{{j,i_{j} }}^{*}\); \(f_{{j,i_{j} }} ( \cdot )\) is an unknown smooth nonlinear function. X = [x T1 , …, x T n ]T with \(x_{j} = [x_{j,1} , \ldots ,x_{{j,m_{j} }} ]^{\text{T}}\).
In this paper, a hysteresis quantizer method is adopted to avoid the chattering problem. q j (u j ) denotes a quantized input signal. Similar to [28–30], the quantized input in this paper is described as:
where u j = ρ (1−i) u 0,j with integer i = 1, 2, … and \(\delta_{j} = \frac{{1 - \rho_{j} }}{{1 + \rho_{j} }}\) with parameters u 0,j > 0 and 0 < ρ < 1. q j (u j ) is in the set U = {0, ± u i,j , ± u i,j (1 − δ j )}. \(u_{\hbox{min} } = \frac{{u_{0,j} }}{{1 + \delta_{j} }}\) is the bound of the dead zone for q j (u j ). The map of the hysteretic quantizer q j (u j ) for u j > 0 is shown in Fig. 1.

Map of q j (u j ) for u j > 0
Remark 1
The parameter ρ j can be seen as a measure of quantization density. If ρ j is smaller, then the quantizer will become coarser. Note that when ρ j → 0, δ j → 1, then q j (u j ) will have fewer quantization levels as u j ranges over that interval. The control action for the hysteretic quantizer (2) should be satisfied in terms of existence and uniqueness of solution of the closed-loop systems. The parameter ρ j in (2) is not given a prior since that system (1) is uncertain. Instead, it can be chosen by using a guideline to guarantee that the closed-loop system is stable.
In order to propose a suitable control scheme, we decompose the hysteretic quantizer q j (u j ) into the following form:
where D j (u j ) and s j (t) denote nonlinear functions. In view of the nonlinearity D j (u j ) and s j (t), the following lemma is needed.
Lemma 1 [29 30 ]
The nonlinearities D j (u j ) and s j (t) satisfy
Proof
From Fig. 1 and sector bound property, for |u j | ≥ u min, one has
where \(s_{j} (u_{j} ) = \frac{{q_{j} (u_{j} )}}{{u_{j} }}\).
For |u j | ≤ u jmin, q j (u j ) = 0 from the definition (3), we have
Define
and
Then, q j (u j ) = D j (u j )u j + s j (t) holds, where D j (u j ) and s j (t) satisfy (4), respectively. The proof is completed.
Control objective: The control objective of this paper is to develop the suitable adaptive quantized control inputs u j for systems (1), so that all the variables are bounded, and the systems output y j (t) can track the desired trajectories y j,r (t), regardless of the unknown function \(f_{{j,i_{j} }} (X),\) unmeasured states x i , and quantized input signal q j (u j ), j = 1, …, n, i j = 1, …, m j .
Assumption 1 ([18–21])
The desired trajectories y j,r (t) are continuous and have the following property
where Ξ j,0 is a positive constant.
2.2 Fuzzy logic systems
A fuzzy logic system consists of four parts: the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier. The knowledge base for FLS comprises a collection of fuzzy if–then rules, which can be described as follows:
R i : if x 1 is F l1 , and x 2 is F l2 and …and, x n is F l n , then y is G l, l = 1, 2, …, N. where x = (x 1, …, x n )T and yare the FLS input and output, respectively. Fuzzy sets F l i and G l are associated with the fuzzy functions \(\mu_{{F_{i}^{l} }}\) and \(\mu_{{G^{l} }}\), respectively. N is the rules number.
According to the singleton function, center average defuzzification, the FLS becomes
where \(\bar{y}_{l} = \max_{y \in R} \mu_{{G^{l} }} (y)\).
Let the fuzzy basis functions are
Denoting \(\theta^{T} = (\bar{y}_{1} ,\bar{y}_{2} , \cdots ,\bar{y}_{N} ) = (\theta_{1} ,\theta_{2} , \cdots ,\theta_{N} )\) and φ(x) = (φ 1(x), …, φ N (x))T, then FLS (10) can be rewritten as
Lemma 2 ([32])
Let f(x) be a continuous function defined on a compact set Ω. Then, for any constant ɛ > 0, there exists a fuzzy logic system (11) such as
3 Adaptive quantized control design
In the following section, a fuzzy state observer will be designed first, then an adaptive fuzzy quantized tracking control method will be developed by utilizing the DSC backstepping design method, and the stability of the control system will be proved.
Assume that the FLSs are as follows:
Then, the optimal approximated parameter vectors \(\theta_{{j,i_{j} }}^{*}\) and \(\theta_{{j,m_{j} }}^{*}\) are defined as
where \(\varOmega_{{j,i_{j} }}\), \(U_{{j,i_{j} }}\), \(\varOmega_{{j,m_{j} }}\), and \(U_{{j,m_{j} }}\) are compact regions for \(\theta_{{j,i_{j} }}\), \(\hat{X}\), \(\theta_{{j,m_{j} }}\), and \((\hat{X},\underline{u}_{j - 1} )\), respectively.
Use the FLSs \(\hat{f}_{{j,i_{j} }} (\hat{X}\left| {\theta_{{j,i_{j} }} } \right.)\) and \(\hat{f}_{{j,m_{j} }} (\hat{X},\underline{u}_{j - 1} \left| {\theta_{{j,m_{j} }} } \right.)\) to approximate the nonlinear functions in systems (1), and let the approximation errors \(\varepsilon_{{j,i_{j} }}\) as
where \(\varepsilon_{{j,i_{j} }}\) is bounded by the unknown constant \(\varepsilon_{{j,i_{j} }}^{ * }\), i.e., \(\left| {\varepsilon_{{j,i_{j} }} } \right| \le \varepsilon_{{j,i_{j} }}^{ * }\) j = 1, …, n, i j = 1, …, m j .
Rewrite (1) as
where \(A_{j} = \left[ {\begin{array}{*{20}c} 0 & {} & {} & {} \\ \vdots & {} & I & {} \\ 0 & 0 & \cdots & 0 \\ \end{array} } \right] ,\) \(B_{{m_{j} }} = [0\;\; \cdots \;\;1]^{\text{T}}\),\(B_{{j,i_{j} }} = [\underbrace {0 \cdots 0\;1}_{{i_{j} }} \cdots 0]^{\text{T}}\), \(d_{j} (t) = [\begin{array}{*{20}c} {d_{j,1} } & \cdots & {d_{{j,m_{j} }} } \\ \end{array} ]^{\text{T}}\), C j = [1···0].
Similar to the state observer in [15, 16], in this paper, we design the following state observer
where \(A_{j} = \left[ {\begin{array}{*{20}c} { - k_{j,1} } & {} & {} & {} \\ \vdots & {} & I & {} \\ { - k_{{j,m_{j} }} } & 0 & \cdots & 0 \\ \end{array} } \right] ,\) \(K_{j} = [k_{j,1} \cdots k_{{j,m_{j} }} ]^{\text{T}}\), and \(\hat{X}\) is designed to estimate the state vector X.
Let the vector K j to satisfy matrix A j be a strict Hurwitz matrix. Then, choose a matrix Q j = Q T j > 0, there will be a matrix P j = P T j > 0 satisfying
The observer error vector e j is designed as
Then, from (14) and (16), we can obtain
where \(\varepsilon_{j} = [\varepsilon_{j,1,} , \ldots ,\varepsilon_{{j,m_{j} }} ]^{\text{T}}\) and \(\tilde{\theta }_{{j,i_{j} }} = \theta_{{j,i_{j} }}^{*} - \theta_{{j,i_{j} }}\).
We choose the Lyapunov function candidate V 0 for (18) as V 0 = ∑ n j=1 V j,0 = ∑ n j=1 e T j P j e j , and then from (15) and (18), the time derivative of V 0 follows that
where p j,0 = λ min(Q j ) − r j − 1 − (σ j + 1)m j ‖P j ‖2, λ min(Q j ) is the smallest eigenvalue of matrix Q j , \(L_{j,0} = \left\| {P_{j} } \right\|^{2} \left\| {\varepsilon_{j}^{*} } \right\|^{2} + \sum\nolimits_{{i_{j} = 1}}^{{m_{j} }} {d_{{j,i_{j} }}^{*2} }\).
In the following, the process of controller design has been divided into m j steps, and each step is based on the following change of coordinates:
where \(z_{{j,i_{j} }}\)(\(j = 1, \ldots ,n; \, \;i_{j} = 2, \ldots ,m_{j}\)) is error surface, \(\vartheta_{{j,i_{j} }}\) is a state variable which will be defined later,\(\alpha_{{j,i_{j} - 1}}\) are intermediate control functions, and \(\chi_{{j,i_{j} }}\) is called the output error of the first-order filter.
-
Step 1 Since \(x_{j,2} = \hat{x}_{j,2} + e_{j,2}\), we can easily obtain the time derivative of z j,1 as
$$\begin{aligned} \dot{z}_{j,1} =& z_{j,2} + \chi_{j,2} + \alpha_{j,1} + \theta_{1,k}^{\text{T}} \varphi_{1,k} (\hat{x}_{1} ) + \theta_{j,1}^{*T} \varphi_{j,1} (\hat{X}) - \theta_{1,k}^{{*{\text{T}}}} \varphi_{1,k} (\hat{x}_{1} ) \\ &+ \tilde{\theta }_{1,k}^{\text{T}} \varphi_{1,k} (\hat{x}_{1} ) + e_{j,2} - \dot{y}_{j,r} + \varepsilon_{j,1} + d_{j,1} \\ \end{aligned}$$(22)where \(\tilde{\theta }_{j,1} = \theta_{j,1}^{*} - \theta_{j,1}\). Choose the Lyapunov function candidate as
$$V_{1} = \sum\limits_{j = 1}^{n} {V_{j,1} } = \sum\limits_{j = 1}^{n} {\bigg(V_{j,0} + \frac{1}{2}z_{j,1}^{2} + \frac{1}{{2\gamma_{j,1} }}\tilde{\theta }_{j,1}^{\rm T} \tilde{\theta }_{j,1} + \frac{1}{{2r_{j,1} }}\tilde{\varTheta }_{j,1}^{2} } \bigg)$$(23)where γ j,1 > 0 and δ j,1 > 0 are design parameters, and \(\tilde{\varTheta }_{{j,i_{j} }} = \varTheta_{{j,i_{j} }}^{*} - \varTheta_{{j,i_{j} }}\), \(\varTheta_{{j,i_{j} }}^{*} = \left\| {\theta_{{j,i_{j} }}^{ * } } \right\|^{2}\), \(\varTheta_{{j,i_{j} }}\) is the estimate of \(\varTheta_{{j,i_{j} }}^{*}\).
From (22) and (23), the time derivative of V 1 satisfies
$$\begin{aligned} \dot{V}_{1} &\le \, \dot{V}_{0} + \sum\limits_{j = 1}^{n} {\bigg(z_{j,1} (} z_{j,2} + \chi_{j,2} + \alpha_{j,1} + \theta_{j,1}^{\text{T}} \varphi_{j,1} (\hat{x}_{j,1} ) + \theta_{j,1}^{{*{\text{T}}}} \varphi_{j,1} (\hat{X}) - \theta_{j,1}^{{*{\text{T}}}} \varphi_{j,1} (\hat{x}_{j,1} ) \\& \quad + \tilde{\theta }_{j,1}^{\text{T}} \varphi_{j,1} (\hat{x}_{j,1} ) + e_{j,2} - \dot{y}_{j,r} \\ & \quad+\,\varepsilon_{j,1} + d_{j,1} ) + \frac{1}{{\gamma_{j,1} }}\tilde{\theta }_{j,1}^{\rm T} \dot{\tilde{\theta }}_{j,1} + \frac{1}{{r_{j,1} }}\tilde{\varTheta }_{j,1}^{\rm T} \dot{\tilde{\varTheta }}_{j,1} \bigg) \\ \end{aligned}$$(24)
By using the completing squares, we have
where σ j > 0 is a design parameter.
Substituting (25)–(26) and \(\dot{V}_{0}\) into (24), it yields
where \(p_{j,1} = p_{j,0} - \frac{1}{2}\), \(L_{j,1} = L_{j,0} + \frac{1}{2}\varepsilon_{j,1}^{*2} + \frac{1}{2}d_{j,1}^{*2} + \frac{2}{{\sigma_{j} }}\).
Design the intermediate control function α j,1 and the parameter adaptation functions θ j,1 and Θ j,1 as
where β j,1 > 0, τ j,1 > 0, and \(\bar{\tau }_{j,1} > 0\) are design parameters.
Substituting (28)–(30) into (27), it follows that
Given the newly defined state variable ϑ j,2, and let α j,1 pass through a first-order filter with a constant ζ j,2, we have
Define χ j,2 = ϑ j,2 − α j,1, and it yields \(\dot{\vartheta }_{j,2} = - \frac{{\chi_{j,2} }}{{\varsigma_{j,2} }}\) and
where the continuous function H j,2(·) consists of z j,1, z j,2, χ j,2,\(y_{j,r} ,\dot{y}_{j,r} ,\ddot{y}_{j,r}\), Θ j,1 and θ j,1 with the following expression
-
Step i j (2 ≤ i j ≤ m j − 1) Similar to Step 1, we have
$$\dot{z}_{{j,i_{j} }} = z_{{j,i_{j} }} + \chi_{{j,i_{j} + 1}} + k_{{j,i_{j} }} e_{j,1} + \alpha_{{j,i_{j} }} + \theta_{{j,i_{j} }}^{\text{T}} \varphi_{{j,i_{j} }} (\hat{X}) - \dot{\vartheta }_{{j,i_{j} }}$$(35)
Given the newly defined state variable \(\vartheta_{{j,i_{j} + 1}}\), and let \(\alpha_{{j,i_{j} }}\) pass through a first-order filter with time constant \(\varsigma_{{j,i_{j} + 1}}\), we have
Let \(\chi_{{j,i_{j} + 1}} = \vartheta_{{j,i_{j} + 1}} - \alpha_{{j,i_{j} }}\), and it yields \(\dot{\vartheta }_{{j,i_{j} + 1}} = - \frac{{\chi_{{j,i_{j} + 1}} }}{{\varsigma_{{j,i_{j} + 1}} }}\) and
where the continuous function \(H_{{j,i_{j} + 1}} ( \cdot )\) consists of \(\, z_{j,1} , \ldots ,\,z_{{j,i_{j} }} ,\) \(\,\chi_{j,2} , \ldots ,\,\chi_{{j,\rlap{--} i_{l} + 1}}\),\(\,y_{j,r} ,\,\dot{y}_{j,r}\), \(\, \ddot{y}_{j,r}\), \(\varTheta_{j,1} , \ldots ,\varTheta_{{j,i_{j} }}\), and \(\theta_{j,1} , \ldots ,\theta_{{j,i_{j} }}\) with the following expression
Choose the Lyapunov function candidate \(V_{{i_{j} }}\) as
where \(\gamma_{{j,i_{j} }} > 0\) and \(r_{{j,i_{j} }}\) are design parameters. We can easily obtain the time derivative of \(V_{{j,i_{j} }}\) as
where \(\tilde{\theta }_{{j,i_{j} }} = \theta_{{j,i_{j} }}^{*} - \theta_{{j,i_{j} }}\). In the view of the derivations in Step 1, it yields
where σ j is a design parameter.
Substituting (41) into (40) yields
where \(L_{{j,i_{j} }} = L_{{j,i_{j} - 1}} + \frac{2}{{\sigma_{j} }}\).
Design the following intermediate control function \(\alpha_{{j,i_{j} }}\), and the adaptation function \(\theta_{{j,i_{j} }}\) as
where \(\beta_{{j,i_{j} }} > 0\), \(\tau_{{j,i_{j} }} > 0\), and \(\bar{\tau }_{{j,i_{j} }} > 0\) are design parameters. Substituting (43)–(45) into (42) yields
-
Step m j In this step, the quantized control input u j will appear. Similar to the step i j , we can obtain the time derivative of \(z_{{j,m_{j} }}\) as follows:
Consider the overall Lyapunov function as
where \(\gamma_{{j,m_{j} }} > 0\) is the design parameter and \(\tilde{\theta }_{{j,m_{j} }} = \theta_{{j,m_{j} }}^{*} - \theta_{{j,m_{j} }}\).
By using (3), (47), and (48), one has
where \(\tilde{\theta }_{{j,m_{j} }} = \theta_{{j,m_{j} }}^{*} - \theta_{{j,m_{j} }}\).
From (4), and in the view of the derivations in Step i j , it yields
where \(L_{{j,m_{j} }} = L_{{j,m_{j} - 1}} + \frac{2}{{\sigma_{j} }} + \frac{1}{2}u_{\hbox{min} }^{2}\).
Design the controller u j and the adaptation function \(\theta_{{j,m_{j} }}\) as follows:
where \(\tau_{{j,m_{j} }} > 0\) and \(\beta_{{j,m_{j} }} > 0\) are design constants.
Note that, from (4) and (51), and by completing the square, we can obtain
Substituting (53)–(54) into (50) yields
Let
where D j,k is a known positive constant.
Since Ξ j,k is a compact set and H j,k+1 is a continuous function, there exists a positive constant M j,k+1 such that |H j,k+1| ≤ M j,k+1 on Ξ j,k . Consequently, we have
By completing the square for each parameter estimate:
Then, (55) can be written as
Choose p j,1 > 0,\(\beta_{j,k} - \frac{1}{2} > 0\), (k = 1, …, m j ),\(\frac{{\tau_{j,1} }}{{2\gamma_{j,1} }} - \frac{2}{{\sigma_{j} }} > 0\),\(\frac{1}{{\varsigma_{j,k + 1} }} - 1 > 0\), (k = 1, …, m j − 1) and \(\frac{{\tau_{j,k} }}{{2\gamma_{j,k} }} - \frac{1}{{\sigma_{j} }} > 0\), and define
\(\begin{aligned} C = & \mathop {\hbox{min} }\nolimits_{\begin{subarray}{l} 1 \le j \le n \\ 1 \le k \le m_{j} \end{subarray} } \{ 2\beta_{j,k} ,(1 \le k \le m_{j} ),\;\tau_{j,k} - \frac{{4\gamma_{j,k} }}{{\sigma_{j} }},\frac{2}{{\varsigma_{j,k + 1} }} - 2,(1 \le k \le m_{j} - 1),\tau_{j,1} - \frac{{2\gamma_{j,1} }}{{\sigma_{j} }}, \\ 2\bar{\tau }_{j,k} ,{{p_{j,1} } \mathord{\left/ {\vphantom {{p_{j,1} } {\lambda_{\hbox{min} } (P_{j} )}}} \right. \kern-0pt} {\lambda_{\hbox{min} } (P_{j} )}}\} \\ \end{aligned}\) and \(D = \sum\nolimits_{j = 1}^{n} {(L_{{j,m_{j} }} + \frac{1}{2}\sum\nolimits_{k = 1}^{{m_{j} - 1}} {M_{j,k + 1}^{2} } } )\).
Then, (60) can be further rewritten as
Integrating (61) over [0, T], we can easily obtain that
which means that all the signals in the closed-loop systems are bounded, such as \(\mathop {\lim }\nolimits_{t \to \infty } \quad \left\| {e_{j} } \right\| \le \sqrt {{{(V(0) + \frac{D}{C})} \mathord{\left/ {\vphantom {{(V(0) + \frac{D}{C})} {\lambda_{\hbox{max} } (P_{j} )}}} \right. \kern-0pt} {\lambda_{\hbox{max} } (P_{j} )}}}\), and \(\mathop {\lim }\nolimits_{t \to \infty } \quad \left| {z_{{j,_{{i_{j} }} }} } \right| \le \sqrt {2V(0) + 2\frac{D}{C}}\).
Moreover, the observer and the tracking errors can converge to a small neighborhood of the origin by suitably choosing the following parameters \(\beta_{{j,i_{j} }}\), \(k_{{j,i_{j} }}\),\(\tau_{{j,i_{j} }}\),\(r_{{j,i_{j} }}\),\(\gamma_{{j,i_{j} }}\), \(\bar{\tau }_{{j,i_{j} }}\), and σ j .
The aforementioned design and analysis procedures are summarized in the following theorem.
Theorem 1
For MIMO nonstrict-feedback nonlinear systems (1), under Assumption 1, the controller (51), and state observer (16), together with the intermediate controls (28), (43), and the adaptation functions (29–30), (44–45) and (52), guarantee that all variables in the closed-loop systems are bounded. Furthermore, the observer and the tracking errors can converge to a small neighborhood of the origin by appropriate choosing the design parameters.
From the previous discussions, the control design procedures and the guideline of the parameter selections are given as follows:
-
Step 1:
specify the vector L j such that matrix A j is a strict Hurwitz matrix, positive definite matrices Q j and by solving the Lyapunov Eq. (16), positive definite matrices P j are obtained.
-
Step 2:
select appropriately design parameters such that \(\beta_{{j,i_{j} }} > 0\), \(\tau_{{j,i_{j} }} > 0\) and \(\bar{\tau }_{{j,i_{j} }} > 0\), and the determine intermediate control functions α j,1(28), \(\alpha_{{j,i_{j} }}\)(43), and the parameters adaptation laws θ j,1 (29), Θ j,1 (30), \(\theta_{{j,i_{j} }}\) (44), and \(\varTheta_{{j,i_{j} }}\) (45), i j = 1, …, m j − 1.
-
Step 3:
select appropriately design parameters \(\beta_{{j,m_{j} }} > 0\), \(\tau_{{j,m_{j} }} > 0\) and \(\bar{\tau }_{{j,m_{j} }} > 0\), actual controller u j , and adaptive update law θ j,k m j , \(\varTheta_{{j,m_{j} }}\).
4 Simulation study
In this section, we provide a simulation example with the aim to evaluate the control performance of the proposed control strategy.
Example
We consider the following MIMO nonstrict-feedback system:
where f 1,1(X) = x 1,1 sin 2(x 1,2) + sin (x 2,1) cos (x 2,2),\(f_{1,2} (X) =\,\frac{{x_{1,1}^{2} e^{{ - x_{1,2}^{2} }} }}{{1 + x_{1,1}^{2} }} + x_{1,1} \sin (x_{2,1} x_{2,2} )\), \(d_{1,1} (t) = 0.2\sin (t)\), d 1,2(t) = 0.2 cos (t), \(f_{2,1} (X) = \frac{{x_{2,1} }}{{1 + x_{1,1}^{2} }} + 0.1\sin (x_{2,1} )\cos (x_{2,2} )\), f 2,2(X, u 1) = 0.2x 2,1 x 21,2 + cos (x 2,1 x 22,2 ), d 2,1 = 0.5 sin (t),\(d_{2,2} (t) = \frac{{x_{2,1}^{2} e^{{ - x_{2,2}^{2} }} }}{{1 + x_{2,1}^{2} }}\). The reference signals are y 1,r (t) = sin (0.5t) and y 2,r (t) = sin (0.4t). Choose the parameters in hysteresis quantizer (2) as δ 1 = 0.5, δ 2 = 0.1, and u jmin = 0.8 (j = 1, 2).
Choose the fuzzy membership functions as
\(\mu_{{F_{j,i}^{l} }} = \exp \bigg[ - \frac{{(\hat{x}_{j,1} - 3 + l)^{2} }}{16}\bigg]\), \(\mu_{{F_{j,2}^{l} }} = \exp \bigg[ - \frac{{(\hat{x}_{j,2} - 6 + 2l)^{2} }}{4}\bigg]\) j = 1, 2; l = 1, …, 5.
According to [31], the FLS can be constructed as
Setting the parameters k 1,1 = 4, k 2,1 = 4, k 1,2 = 3, and k 2,2 = 3, the state observer is constructed as
Choose the design parameters in the controllers u j (51), the intermediate controls α j,1 (28) the adaptive laws θ j,1 (29) and θ j,2 (52) as
β 1,1 = β 2,1 = 1, β 1,2 = β 2,2 = 4, γ 1,1 = γ 1,2 = γ 2,1 = γ 2,2 = 0.1, r 1,1 = r 1,2 = r 2,1 = r 2,2 = 0.5, τ 1,1 = τ 1,2 = τ 2,1 = τ 2,2 = 0.5, \(\bar{\tau }_{1,1} = \bar{\tau }_{1,2} = \bar{\tau }_{2,1} = \bar{\tau }_{2,2} = 0.5\).
The initial values of the variables x i,j (i, j = 1, 2) are chosen as x 1,1(0) = 0.1, x 1,2(0) = 0.1, x 2,1(0) = 0.1, x 2,2(0) = 0.1,\(\hat{x}_{1,1} (0) = 0.1\), \(\hat{x}_{1,2} (0) = 0.1\), \(\hat{x}_{2,1} (0) = 0.1\), and the others initial values are zeros.
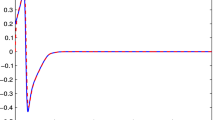
By applying the proposed adaptive quantized fuzzy control approach to systems (63)–(64), the simulation results are shown in Figs. 2, 3, 4, 5, 6, 7, and 8, where Figs. 2 and 3 show the trajectories of the systems output y j and tracking signal y j,r , respectively; Figs. 4 and 5 show the trajectories of x j,1 and their estimates \(\hat{x}_{j,1}\), respectively; Fig. 6 shows the trajectories of the observer errors e j,2; and Figs. 7 and 8 show the control input u j and the quantized input signal q j (u j ), j = 1, 2.

Curves of y 1 (blue) and y 1,r (red)

Curves of x 1,1 (blue) and \(\hat{x}_{1,1}\) (red)

Curves of y 1 (blue) and y 2,r (red)

Curves of x 2,1 (blue) and \(\hat{x}_{2,1}\) (red)

Curves of e 1,2 (blue) and e 2,2 (red)

Curves of u 1 (blue) and q 1(u 1) (red)

Curves of u 2 (blue) and q 2(u 2) (red)
Figures 2, 3, 4, 5, 6, 7, and 8 show that the proposed control approach can guarantee the stability of the MIMO nonstrict-feedback systems, and the boundedness of the tracking and observer errors regardless of the existence of uncertain nonlinearities, unmeasurable states, and hysteretic quantized input.
Remark 2
It is worth noting that the authors in [26–31] investigated the input quantization control problem for a class of SISO nonlinear systems. However, the work in [26–31] did not consider the problem of states immeasurable and “explosion of complexity”. Therefore, they cannot be applied to control the MIMO nonstrict-feedback nonlinear systems (63)–(64) for example.
5 Conclusions
A new fuzzy-based adaptive quantized DSC control method has been proposed for uncertain MIMO nonstrict-feedback nonlinear systems with input quantization. The hysteretic quantized input has been decomposed by using two bounded nonlinear functions, and the fuzzy logic systems and a fuzzy state observer have been adopted to identify the uncertain nonlinear functions and to estimate the unmeasurable states, respectively. The investigated adaptive fuzzy quantized control scheme not only guarantees the stability of the MIMO nonstrict-feedback systems, and the boundedness of the tracking and observer errors, but also solves the problem of hysteretic quantized input. Future researches will be concentrated on a fuzzy adaptive quantized optimal control design for nonstrict-feedback nonlinear systems. Further research will concentrate on adaptive fuzzy control for MIMO nonlinear affine or nonaffine systems with time-varying and input delay based on this paper and the results of [33–37].
References
Boulkroune A, Tadjine M, M’saad M, Farza M (2008) How to design a fuzzy adaptive control based on observers for uncertain affine nonlinear systems. Fuzzy Sets Syst 159:926–948
Boulkroune A, Tadjine M, Saadc M, Farza M (2010) Fuzzy adaptive controller for MIMO nonlinear systems with known and unknown control direction. Fuzzy Sets Syst 161(6):797–820
Boulkroune A, M’Saad M, Farza M (2011) Adaptive fuzzy controller for multivariable nonlinear state time-varying delay systems subject to input nonlinearities. Fuzzy Sets Syst 164(1):45–65
Chen B, Liu XP (2005) Fuzzy approximate disturbance decoupling of MIMO nonlinear systems by backstepping and application to chemical processes. IEEE Trans Fuzzy Syst 13(6):832–847
Li TS, Tong SC, Feng G (2010) A novel robust adaptive-fuzzy-tracking control for a class of nonlinear MIMO systems. IEEE Trans Fuzzy Syst 18(1):150–160
Lee H (2011) Robust adaptive fuzzy control by backstepping for a class of MIMO nonlinear systems. IEEE Trans Fuzzy Syst 19(2):265–275
Chen M, Ge SS, How BVE (2010) Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE Trans Neural Netw 21(5):796–812
Chen M, Ge SS, Ren BB (2011) Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica 47(3):452–465
Wu LB, Yang GH (2016) Adaptive fuzzy tracking control for a class of uncertain nonaffine nonlinear systems with dead-zone inputs. Fuzzy Sets Syst 290:1–21
Wang F, Liu Z, Lai GY (2015) Fuzzy adaptive control of nonlinear uncertain plants with unknown dead zone output. Fuzzy Sets Syst 263:27–48
Wang HQ, Chen B, Lin C (2013) Adaptive fuzzy decentralized control for a class of large-scale stochastic nonlinear systems. Neurocomputing 103:155–163
Yoo SJ, Park JB (2009) Neural-network-based decentralized adaptive control for a class of large-scale nonlinear systems with unknown time-varying delays. IEEE Trans Syst Man Cybern B Cybern 39(5):1316–1323
Tong SC, Li YM, Feng G, Li TS (2011) Observer-based adaptive fuzzy backstepping dynamic surface control for a class of MIMO nonlinear systems. IEEE Trans Fuzzy Syst 41(4):1124–1135
Tong SC, Sui S, Li YM (2015) Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained. IEEE Trans Fuzzy Syst 23(4):729–742
Shi WX (2015) Observer-based fuzzy adaptive control for multi-input multi-output nonlinear systems with a nonsymmetric control gain matrix and unknown control direction. Fuzzy Sets Syst 263:1–26
Chen WS, Jiao LC (2010) Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans Syst Man Cybern B Cybern 40(3):939–950
Zhou Q, Shi P, Liu HH, Xu SY (2012) Neural-network-based decentralized adaptive output-feedback control for large-scale stochastic nonlinear systems. IEEE Trans Syst Man Cybern B Cybern 42(6):1608–1619
Chen B, Liu XP, Ge SS (2012) Adaptive fuzzy control of a class of nonlinear systems by fuzzy approximation approach. IEEE Trans Fuzzy Syst 20(6):1012–1021
Chen B, Lin C, Liu XP, Liu KF (2015) Adaptive fuzzy tracking control for a class of MIMO nonlinear systems in nonstrict-feedback form. IEEE Trans Cybern 45(12):2744–2755
Wang HQ, Liu XP, Liu KF, Karimi Hamid Reza (2015) Approximation-based adaptive fuzzy tracking control for a class of non-strict-feedback stochastic nonlinear time-delay systems. IEEE Trans Fuzzy Syst 23(5):1746–1760
Wang HQ, Chen B, Liu KF, Liu XP, Lin C (2014) Adaptive neural tracking control for a class of nonstrict-feedback stochastic nonlinear systems with unknown backlash-like hysteresis. IEEE Trans Neural Netw Learn Syst 25(5):947–958
Zhou Q, Li HY, Wu CW, Wang LJ, Ahn CK (2016) Adaptive fuzzy control of nonlinear systems with unmodeled dynamics and input saturation using small-gain approach. IEEE Trans Syst Man Cybern Syst. doi:10.1109/TSMC.2016.2586108
Chen B, Zhang HG, Lin C (2015) Observer-based adaptive neural network control for nonlinear systems in nonstrict-feedback form. IEEE Trans Neural Netw Learn Syst 27(1):89–98
Wang HQ, Liu KF, Liu XP, Chen B, Lin C (2015) Neural-based adaptive output-feedback control for a class of nonstrict-feedback stochastic nonlinear systems. IEEE Trans Cybern 45(9):1977–1987
Tong SC, Li YM, Sui S (2016) Adaptive fuzzy tracking control design for SISO uncertain nonstrict feedback nonlinear systems. IEEE Trans Fuzzy Syst 24(6):1441–1454. doi:10.1109/TFUZZ.2016.2540058
Hayakawaa T, Ishii H, Tsumurac K (2009) Adaptive quantized control for linear uncertain discrete-time systems. Automatica 45:692–700
Sun H, Hovakimyan N, Basar T (2010)L 1 adaptive controller for systems with input quantization. In: American Control Conference (ACC), Baltimore. pp 253-258
Hayakawaa T, Ishii H, Tsumurac K (2009) Adaptive quantized control for nonlinear uncertain systems. Systems Control and Letters 58(9):625–632
Zhou J, Wen CY, Yang GH (2014) Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans Autom Control 59(2):460–464
Liu Z, Wang F, Zhang Y, Chen CLP (2016) Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Transaction on Cybernetics 46(2):524–534
Sui S, Tong SC (2016) Fuzzy adaptive quantized output feedback tracking control for switched nonlinear systems with input quantization. Fuzzy Sets Syst 290:56–78
Wang LX (1994) Adaptive fuzzy systems and control. Prentice Hall Englewood Cliffs, NJ
Meng WC, Yang QM, Jagannathan S, Sun YX (2014) Adaptive neural control of high-order uncertain nonaffine systems: a transformation to affine systems approach. Automatica 50(5):1473–1480
Meng WC, Yang QM, Sun YX (2016) Guaranteed Performance Control of DFIG Variable-Speed Wind Turbines. IEEE Trans Control Syst Technol 24(6):2215–2223
Choi HD, Ahn CK, Shi P, Wu LG, Lim MT (2016) Dynamic output-feedback dissipative control for T-S fuzzy systems with time-varying input delay and output constraints. IEEE Trans Fuzzy Syst. doi:10.1109/TFUZZ.2016.2566800
Wang JH, Gao YB, Qiu JB, Ahn CK (2016) Sliding mode control for non-linear systems by Takagi-Sugeno fuzzy model and delta operator approaches. IET Control Theory Appl. doi:10.1049/iet-cta.2016.0231
Fu J, Ma RC, Chai TY (2015) Global finite-time stabilization of a class of switched nonlinear systems with the powers of positive odd rational numbers. Automatica 54:360–373
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Additional information
This work was supported in part by the National Natural Science Foundation of China (Nos. 61603167, 61374113).
Rights and permissions
About this article

Cite this article
Sui, S., Tong, S. Observer-based adaptive fuzzy quantized tracking DSC design for MIMO nonstrict-feedback nonlinear systems. Neural Comput & Applic 30, 3409–3419 (2018). https://doi.org/10.1007/s00521-017-2929-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-017-2929-4