
Abstract
In this paper, a composite adaptive fuzzy output feedback control problem is investigated for a class of single-input and single-output stochastic nonlinear systems, where the input signal takes quantized values. In the control design, by using fuzzy logic systems to approximate the unknown nonlinear functions, a fuzzy adaptive state observer is designed to estimate the unmeasured states. By utilizing the designed fuzzy state observer, a serial–parallel estimation model is established. Based on adaptive backstepping dynamic surface control technique and the prediction error between the system states observer model and the serial–parallel estimation model, an adaptive output feedback controller is constructed. The designed fuzzy controller with the composite parameters adaptive laws ensures that all the variables of closed-loop system are bounded in probability, and tracking error converges to a small neighborhood of zero. Two examples are provided to verify the effectiveness of the proposed approach.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, stability analysis and control design on stochastic nonlinear systems [1] have received considerable attention. For example, the authors in [2] first investigated adaptive backstepping control design problem for a class of strict-feedback stochastic systems by using the approach of risk-sensitive cost criterion. Deng and Krstic [3] and Liu et al. [4] proposed output feedback backstepping controllers for a class of stochastic nonlinear systems. However, it should be pointed out that the aforementioned results in [2–4] are only suitable for nonlinear systems in which the nonlinearities are known or with the unknown parameters appearing linearly with respect to known nonlinear functions. Therefore, the approaches in [1–4] cannot be applied to those stochastic systems with completed unknown structured uncertainties. To overcome the limitations existing in the aforementioned adaptive backstepping control approaches, many adaptive fuzzy and neural network backstepping control design methods have been developed for uncertain stochastic nonlinear systems via fuzzy logic systems or neural networks (NNs). For example, Wang et al. [5] and Yu and Du [6] proposed adaptive NN state feedback control approaches for a class of single-input and single-output (SISO) stochastic nonlinear systems; Wang et al. [7] developed a robust adaptive fuzzy pure-feedback control approach for a class of SISO stochastic nonlinear systems. However, the aforementioned control approaches are developed based on the assumption that the states of controlled systems are measured directly. The authors in [8–11] investigated the adaptive fuzzy and neural network backstepping control design methods for SISO, MIMO nonlinear systems, or large-scale stochastic nonlinear systems with immeasurable states. Although the adaptive fuzzy or NN backstepping stochastic nonlinear control has achieved a great progress, the existing results do not consider the problem of “explosion of complexity.”
It should be mentioned that because of the employment of the backstepping design technique, the previous control design methods in [2–11] inevitably suffer from the problem of “explosion of complexity,” which is caused by repeating differentiations of some nonlinear functions, i.e., the virtual controllers designed at each step with the conventional backstepping technique. As a result, the complexity of a controller drastically grows as the order of the system increases. To solve the problem of the “explosion of complexity” inherent in adaptive backstepping design method, some adaptive fuzzy or NN dynamic surface control approaches have been extensively studied in [12–14] for several classes of uncertain stochastic nonlinear systems. However, the control approaches in [12–14] all can not solve the control problem for uncertain stochastic nonlinear systems with input quantization. Quantized feedback control has attracted a great deal of attention. An important aspect is that utilizing quantization schemes can not only have sufficient precision, but also require low communication rate. Therefore, the analysis and control design of the systems with input quantization has been studied by many authors, for example [15–18]. Among them, Hayakawaa et al. [15] proposed an adaptive quantized control method for a class of linear uncertain discrete-time systems. Compared to the traditional logarithmic quantizer, Hayakawaa et al. [15, 16] extend the results from uncertain linear systems to uncertain nonlinear systems, and first developed a hysteretic quantizer, which can avoid the oscillation caused by logarithmic quantizer. The work in [17] investigated the quantized robust control problem for uncertain strict-feedback systems, and the authors in [18] investigated the adaptive quantized backstepping feedback control problems for SISO strict-feedback uncertain nonlinear systems with hysteretic quantized input. However, the choice of quantization parameters depends on controller design parameters and certain system parameters; it is difficult to choose appropriate quantizer parameters for a complex nonlinear systems.
Though the adaptive fuzzy or NN control design gained much progress, the original intention employing fuzzy system/NN for approximating the system uncertainty is missing. Intuitively, the more precise approximation of the nonlinear function is achieved, the better performance is expected. However, most efforts have been directed toward achieving the stability and tracking performance. Little attention has been paid to the accuracy of the identified intelligent models and to the transparency and interpretability. By designing a serial–parallel estimation model and by using the modeling error, the hybrid adaptive fuzzy identification and control was proposed in [19]. The method achieves faster and improved tracking performance. However, the nth derivative of the plant output is required to be known in [20], which is quite impractical. Thus, some similar control design methods are developed in [21, 22] by using the prediction error and different serial–parallel estimation model [20], respectively. It should be pointed out that the controlled systems under study in [19–22] are restricted to the canonical form (satisfying the matching conditions). Recently, the authors in [23] proposed a novel composite neural dynamic surface controller for a class of uncertain nonlinear strict-feedback systems without satisfying the matching conditions. The proposed control method used the prediction error between system states and serial–parallel estimation model to construct the composite laws for NN weights updating, and achieved better tracking performance than the previous methods [24]. However, the result in [23] requires that the states of the controlled system are measured directly. The authors in [25] proposed a composite adaptive fuzzy dynamic surface control approach for a class of uncertain nonlinear strict-feedback systems with input saturation and unmeasured states, but the considered systems in [25] does not contain the stochastic disturbance or input quantization. To the author’s best knowledge, by far, no composite control results are available for uncertain stochastic nonlinear strict-feedback systems with input quantization, which does not require that the states are available for measurement.
Motivated by the aforementioned observations, in this paper, an observer-based composite adaptive fuzzy backstepping output feedback DSC approach is proposed for a class of uncertain stochastic nonlinear systems containing unmeasured states and input quantization. Fuzzy logic systems are used to approximate the unknown nonlinear functions of the new system, a fuzzy adaptive observer is designed for state estimations. By utilizing the designed fuzzy state observer, a serial–parallel estimation model is established, and by introducing a hysteretic quantizer to avoid chattering. Based on adaptive backstepping dynamic surface control technique and utilizing the prediction error between the system states observer model and the serial–parallel estimation model, an adaptive output feedback controller is constructed. It has proved that the designed fuzzy controller with the composite parameters adaptive laws ensures that all the variables of closed-loop system are bounded in probability, and tracking error converges to a small neighborhood of zero. Compared with the existed results, the main advantages of the proposed control scheme are as follows:
-
(1)
By using the decomposition technique of input quantization, the logarithmic quantizer is decomposed into an actual control and a bounded uncertain term, and this paper first investigated the adaptive fuzzy output feedback quantized control design problem for uncertain stochastic nonlinear system with hysteretic quantized input. The proposed control scheme can not only guarantee the stability of the whole controlled system, but also can attenuate the effect of the hysteretic quantizer on the control performance.
-
(2)
By designing a serial–parallel estimation model, the prediction errors between controlled stochastic nonlinear system model and serial–parallel estimation model have been incorporated into the control design scheme, and the proposed control scheme can achieve good control and tracking performances.
-
(3)
By using the new DSC technique, the proposed fuzzy adaptive control approach can overcome the defect of “explosion of complexity” existed in the references [2–11], thus the computational burden of the control algorithm can be reduced greatly. In addition, the DSC technique design in this paper uses two kinds of first-order filters instead of a first-order filter in [12–14, 24]. Consequently, the restrictive assumption on the bounds of the derivative of virtual control functions being known is removed.
2 Problem Formulations and Preliminaries
2.1 System descriptions
Consider a class of SISO stochastic nonlinear systems in the following form:
where \(x = \underline{x}_{n} = \left[ {x_{1} ,\ldots ,\;x_{n} } \right]^{\text{T}} \in R^{n}\) is the system state vector; \(y \in R\) and \(q(u(t)) \in R\) are the control output and input of the controlled system, respectively. \(\underline{x}_{i} = \left[ {x_{1} ,\ldots ,\;x_{i} } \right]^{\text{T}} \in R^{i}\); \(d_{i}\) (\(i = 1,\;2,\ldots ,\;n\)) is the bounded disturbance and satisfy \(\left| {d_{i} } \right| \le d_{i,M}\) with \(d_{iM}\) being known positive constant. The input \(q(u(t))\) represents the quantizer and takes the quantized values, where \(u(t) \in R\) is the control input signal to be quantized at the encoder side. \(f_{i} ( \cdot )\) (\(i = 1,\;2, \ldots ,\;n\)) is an unknown smooth function, \(g_{i} (x)\) is an uncertain functions, and \(w_{i} \in R\) is an independent standard Brownian motion defined on a complete probability space, with the incremental covariance \(E\left\{ {{\text{d}}w \cdot {\text{d}}w^{\text{T}} } \right\} = \sigma (t)\sigma (t)^{\text{T}} {\text{d}}t\). Throughout this paper, it is assumed that the only output y is available for measurement.
To facilitate the control system design, we need the following assumptions.
Assumption 1 [25]
There exists a constant L i such that
where \(\underline{{\hat{x}}}_{i} = \left[ {\hat{x}_{1} ,\;\hat{x}_{2} ,\ldots ,\;\hat{x}_{i} } \right]^{\text{T}}\) is the estimate of \(\underline{x}_{i} = \left[ {x_{1} ,\;x_{2} , \ldots ,\;x_{i} } \right]^{\text{T}}\); where \(\left\| X \right\|\) denotes the two-norm of a vector \(X\).
Assumption 2 [1]
The disturbance covariance \(g^{\text{T}} \sigma \sigma^{\text{T}} g = \bar{\sigma }\bar{\sigma }^{\text{T}}\) is bounded, where \(g(x) = \left[ {g_{1} , \ldots ,\;g_{n} } \right]^{\text{T}}\).
Control objective The control objective is to design an adaptive fuzzy output feedback control controller such that all the variables of the closed-loop system are bounded in probability. Moreover, the system output y(t) can track the signal y r (t) as closely as possible.
In this paper, we use hysteresis quantizer to avoid chattering. The quantizer q(u(t)) represents the hysteretic quantizer in the following form similar to those in [16, 18]:
Here \(u_{i} = \rho^{(1 - i)} u_{\hbox{min} }\) with integer \(i = 1,\;2, \ldots ,\;n\) and parameters \(u_{\hbox{min} } > 0\) and \(0 < \rho < 1\), \(\alpha = {{(1 - \rho )} \mathord{\left/ {\vphantom {{(1 - \rho )} {(1 + \rho )}}} \right. \kern-0pt} {(1 + \rho )}}\). \(q(u)\) is the set \(U = \left\{ {0,\; \pm u,\; \pm u_{i} (1 + \alpha )} \right\}\). \(u_{\hbox{min} }\) determines the size of the dead-zone for \(q(u(t))\). The map of the hysteretic quantizer \(q(u(t))\) for u > 0 is shown in Fig. 1.

Map of q(u(t)) for u > 0
Remark 1
The parameter ρ is considered as a measure of quantization density. The smaller ρ is, the coarser the quantizer is. When ρ approaches to zero, α approaches to 1, then \(q(u(t))\) will have fewer quantization levels as u ranges over that interval.
Remark 2
The control action for the hysteretic quantizer (2) should be satisfied in terms of existence and uniqueness of solution of the closed-loop systems. Since the system (1) is uncertain so the parameter ρ of the hysteretic quantizer is not given a prior. Instead, it should be chosen based on a guideline that ensures the stability of the closed-loop system.
In order to propose a suitable control scheme, we decompose the logarithmic quantizer \(q(u(t))\) into the following form:
where \(D(u)\) and \(s(t)\) are nonlinear functions. Regarding the nonlinearity \(D(u)\) and \(s(t)\), we have the following lemma.
Lemma 1
The nonlinearities \(D(u)\) and \(s(t)\) satisfy
Proof
From Fig. 1 and using sector bound property, we can get that for \(\left| u \right| \ge u_{\hbox{min} }\)
For \(\left| u \right| \le u_{\hbox{min} }\), \(q(u(t)) = 0\) from the definition (3), we have
Define
and
Then \(q(u(t)) = D(u)u + s(t)\) holds, where \(D(u)\) and \(s(t)\) satisfy (4) and (5), respectively. □
2.2 Fuzzy Logic Systems
Fuzzy logic system (FLS) contains the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules, and the defuzzifier, and the knowledge base comprises a collection of fuzzy If–then rules of the following form:
where \(x = \left[ {x_{1} , \ldots ,\;x_{n} } \right]^{\text{T}}\) and y are the fuzzy logic system input and output, respectively. Fuzzy sets \(F_{i}^{l}\) and \(G_{{}}^{l}\), associated with the fuzzy functions \(\mu_{{F_{i}^{l} }} (x_{i} )\) and \(\mu_{{G^{l} }} (y)\), respectively. N is the rules number.
Through singleton function, center average defuzzification and product inference [26], the fuzzy logic system can be expressed as follows:
where \(\bar{y}_{l} = \mathop {\hbox{max} }\limits_{y \in R} \mu_{{G^{l} }} (y)\).
Fuzzy basis functions can be expressed as
Denote \(\theta = \left[ {\bar{y}_{1} ,\;\bar{y}_{2} , \ldots ,\;\bar{y}_{N} } \right]^{\text{T}} = \left[ {\theta_{1} ,\;\theta_{2} , \ldots ,\;\theta_{N} } \right]^{\text{T}}\) and \(\phi^{\text{T}} (x) = \left[ {\phi_{1} (x), \ldots ,\;\phi_{N} (x)} \right]\), then fuzzy logic system (10) can be rewritten as follows:
Lemma 2 [26]
\(f(x)\) is a continuous function defined on a compact set \(\varOmega\), and we can obtain that for any constant \(\varepsilon > 0\), there exists a fuzzy logic system (12) such as
3 Fuzzy State Observer and Serial–Parallel Estimation Model Designs
It is assumed that the states of system (1) are not available for feedback; therefore, a state observer should be established to estimate the unmeasured states, and then fuzzy adaptive output feedback control scheme is investigated based on the designed state observer. Then system (1) is equivalent to the following system:
Here \(\Delta f_{i} = f_{i} \left( {\underline{x}_{i} } \right) - f_{i} \left( {\underline{{\hat{x}}}_{i} } \right)\), \(i = 2, \ldots ,\;n - 1\); \(\underline{{\hat{x}}}_{i}\) is the estimate of \(\underline{x}_{i}\).
By Lemma 1, the fuzzy logic system is a universal approximator, i.e., it can approximate any a smooth function on a compact space, thus we can assume that the nonlinear terms in (14) can be approximated as follows:
The optimal parameter vectors \(\theta_{1}^{*}\) and \(\theta_{i}^{*}\) are defined as follows:
where \(\varOmega_{1}\), \(\varOmega_{i}\), \(U_{1},\) and \(U_{i}\) are bounding compact regions for \(\theta_{1}\), \(\theta_{i}\), \(x_{1},\) and \(\underline{{\hat{x}}}_{i}\), respectively (\(i = 2, \ldots ,\;n\)). The corresponding minimum approximation errors \(\varepsilon_{i}\)(\(i = 1,\;2, \ldots ,\;n\)) are defined as
where \(\varepsilon_{i}\) satisfies that \(\left| {\varepsilon_{i} } \right| \le \varepsilon_{i}^{*}\), and \(\varepsilon_{i}^{*}\) are known positive constants, \(i = 1,\;2, \ldots ,\;n\).
Design a fuzzy state observer as follows:
Here \(k_{i}\) (\(i = 1,\;2, \ldots ,\;n\)) is a positive design parameter. Rewrite (19) as follows:
where \(A = \left[ {\begin{array}{*{20}l} { - k_{1} } \hfill & {} \hfill & {} \hfill & {} \hfill \\ \vdots \hfill & {} \hfill & I \hfill & {} \hfill \\ { - k_{n} } \hfill & 0 \hfill & \ldots \hfill & 0 \hfill \\ \end{array} } \right]\), \(K = \left[ {\begin{array}{*{20}c} {k_{1} } \\ \vdots \\ {k_{n} } \\ \end{array} } \right]\), \(b = \left[ {\begin{array}{*{20}c} 0 \\ \vdots \\ 1 \\ \end{array} } \right]\), \(B_{i} = \left[ {\begin{array}{*{20}c} 0 & \ldots & 1 & \ldots & 0 \\ \end{array} } \right]^{\text{T}}\), and \(C = \left[ {\begin{array}{*{20}c} 1 & \ldots & 0 & \ldots & 0 \\ \end{array} } \right]\).
Choose the vector K to make matrix A be a strict Hurwitz matrix. Thus, given a positive definite matrix \(Q = Q^{\text{T}} > 0\), there exists a positive definite matrix \(P = P^{\text{T}} > 0\) satisfying
Let \(e = \underline{x}_{n} - \underline{{\hat{x}}}_{n}\) be an observer error vector, then from (14) and (20), the observer error equation can be obtained as follows:
where \(\varepsilon = \left[ {\varepsilon_{1} (x_{1} ), \ldots ,\;\varepsilon_{n} \left( {\underline{{\hat{x}}}_{n} } \right)} \right]^{\text{T}}\), \(\Delta F = \left[ {0,\;\Delta f_{2} , \ldots ,\;\Delta f_{n} } \right]^{\text{T}}\), \(D = \left[ {d_{1} ,\;d_{2} , \ldots ,\;d_{n} } \right]^{\text{T}}\), \(G(x) = \left[ {g_{1} (x),\;g_{2} (x), \ldots ,\;g_{n} (x)} \right]^{\text{T}},\) and \(\tilde{\theta }_{i} = \theta_{i}^{*} - \theta_{i}\), \(i = 1,\;2, \ldots,\;n\).
Based on (19) and according to [27], a serial–parallel estimation model is designed as follows:
Here \(\beta_{i} > 0\) (\(i = 1, \ldots ,\;n\)) is a designed constant.
Define the prediction error as follows:
4 Composite Adaptive Output Feedback Dynamic Surface Control with Prediction Errors
In this section, an adaptive fuzzy output feedback controller will be developed based on the backstepping dynamic surface control design technique, and the parameter adaptive laws will be obtained by using the prediction error, which is derived from the difference between the system state observer model and designed the serial–parallel estimation model in each backstepping design.
-
Step 1 Define the first error surface \(S_{1}\) as follows:
$$S_{1} = x_{1} - y_{r}.$$(26)Expressing \(x_{2}\) in terms of its estimate as \(x_{2} = \hat{x}_{2} + e_{2}\), the time derivative of \(S_{1}\) is written as follows:
$${\text{d}}S_{1} = \dot{x}_{1} \,{\text{d}}t - \dot{y}_{r} \,{\text{d}}t = \left[ {\hat{x}_{2} + \theta_{1}^{\text{T}} \phi_{1} (x_{1} ) + d_{1} - \dot{y}_{r} + e_{2} + \tilde{\theta }_{1}^{\text{T}} \phi_{1} (x_{1} ) + \varepsilon_{1} } \right]\;{\text{d}}t + g_{1} (x)\,{\text{d}}w.$$(27)Choose the first virtual control function \(\hat{x}_{2,d}\) as follows:
$$\hat{x}_{2,d} = - c_{1} S_{1} - \theta_{1}^{\text{T}} \phi_{1} (x_{1} ) + \dot{y}_{r},$$(28)where \(c_{1} > 0\) is a design parameter.
Introduce a new state variable \(\hat{x}_{2,c}\) and let \(\hat{x}_{2,d}\) pass through a first-order filter with a constant \(\tau_{2} > 0\), and the dynamics of \(\hat{x}_{2,c}\) can be expressed as follows:
$$\tau_{2} \dot{\hat{x}}_{2,c} + \hat{x}_{2,c} = \hat{x}_{2,d} ,\quad \hat{x}_{2,c} (0) = \hat{x}_{2,d} (0).$$(29)Define the following compensating signal
$$\dot{z}_{1} = \left[ { - c_{1} z_{1} + z_{2} + \left( {\hat{x}_{2,c} - \hat{x}_{2,d} } \right)} \right]{\text{d}}t,\quad z_{1} (0) = 0,$$(30)where \(z_{2}\) will be defined in the next step, the compensating signal \(z_{1}\) come form the auxiliary system (30), and it can overcome the instability from \(\hat{x}_{2,c} - \hat{x}_{2,d}\).
Define the compensated tracking error signals as \(\chi_{1} = S_{1} - z_{1}\) and \(\chi_{2} = S_{2} - z_{2}\), and choose the adaptive law of parameter \(\theta_{1}\) as follows:
$$\dot{\theta }_{1} = \gamma_{1} \left( {\chi_{1} + \frac{{\delta_{1} }}{{\bar{\gamma }_{1} }}} \right)\phi_{1} (x_{1} ) - \sigma_{1} \theta_{1},$$(31)where \(\gamma_{1} > 0\), \(\bar{\gamma }_{1} > 0,\) and \(\sigma_{1} > 0\) are design parameters, and \(\delta_{1}\) is the predict error, which is obtained from (25).
-
Step i (i = 2, …, n−1). Define the ith error surface \(S_{i}\) as follows:
$$S_{i} = \hat{x}_{i} - \hat{x}_{i,c},$$(32)where \(\hat{x}_{i,c}\) will be defined in (34). Choose the ith virtual control function \(\hat{x}_{i + 1,d}\) as follows:
$$\hat{x}_{i + 1,d} = - c_{i} S_{i} - \theta_{i}^{\text{T}} \phi_{i} \left( {\underline{{\hat{x}}}_{i} } \right) - S_{i - 1} + \dot{\hat{x}}_{i,c} - k_{i} (y - \hat{x}_{1} ) - \eta_{i} \tanh \left( {\frac{{\chi_{i}^{3} \eta_{i} }}{\varsigma }} \right),$$(33)where \(c_{i} > 0\) is a design parameter.
Introduce a new state variable \(\hat{x}_{i + 1,c}\) and let \(\hat{x}_{i + 1,d}\) pass through a first-order filter with a constant \(\tau_{i + 1} > 0\), the dynamics of \(\hat{x}_{i + 1,c}\) can be expressed as follows:
$$\tau_{i + 1} \dot{\hat{x}}_{i + 1,c} + \hat{x}_{i + 1,c} = \hat{x}_{i + 1,d} ,\quad \hat{x}_{i + 1,c} (0) = \hat{x}_{i + 1,d} (0).$$(34)Define the following compensating signal to remove the defect known error \(\hat{x}_{i + 1,c} - \hat{x}_{i + 1,d}.\)
$$\dot{z}_{i} = \left[ { - c_{i} z_{i} - z_{i - 1} + z_{i + 1} + \left( {\hat{x}_{i + 1,c} - \hat{x}_{i + 1,d} } \right)} \right]\,{\text{d}}t,\quad z_{i} (0) = 0.$$(35)Define the compensated tracking error signal \(\chi_{i} = S_{i} - z_{i}\), and choose the adaptive law of parameter \(\theta_{i}\) as follows:
$$\dot{\theta }_{i} = \gamma_{i} \left( {\chi_{i} + \frac{{\delta_{i} }}{{\bar{\gamma }_{i} }}} \right)\phi_{i} \left( {\underline{{\hat{x}}}_{i} } \right) - \sigma_{i} \theta_{i},$$(36)where \(\gamma_{i} > 0\), \(\bar{\gamma }_{i} > 0,\) and \(\sigma_{i} > 0\) are design parameters.
-
Step n In the last step, define the nth error surface \(S_{n}\) as follows:
$$S_{n} = \hat{x}_{n} - \hat{x}_{n,c}.$$(37)Design the input of the quantized input \(u\) and parameter adaptation functions as follows:
$$u = \frac{1}{1 - \alpha }\left[ { - c_{n} S_{n} - \theta_{n}^{\text{T}} \phi_{n} \left( {\underline{{\hat{x}}}_{n} } \right) - S_{n - 1} + \dot{\hat{x}}_{n,c} - k_{n} \left( {y - \hat{x}_{1} } \right) - \eta_{n} \tanh \frac{{\chi_{n}^{3} \eta_{n} }}{\varsigma }} \right],$$(38)where \(c_{n} > 0\) is a design parameter.
Note that, from (4) and (38), we can obtain the following:
$$D(u)u \le - c_{n} S_{n} - \theta_{n}^{\text{T}} \phi_{n} \left( {\underline{{\hat{x}}}_{n} } \right) - S_{n - 1} + \dot{\hat{x}}_{n,c} - k_{n} \left( {y - \hat{x}_{1} } \right) - \eta_{n} \tanh \frac{{\chi_{n}^{3} \eta_{n} }}{\varsigma }.$$(39)Define the following compensating signal as follows:
$$\dot{z}_{n} = \left[ { - c_{n} z_{n} - z_{n - 1} } \right]\;{\text{d}}t,\quad z_{n} (0) = 0.$$(40)Define the compensated tracking error signal \(\chi_{n} = S_{n} - z_{n}\) and the prediction error as follows:
$$\delta_{n} = \hat{x}_{n} - \hat{\hat{x}}_{n},$$(41)where \(\hat{\hat{x}}_{n}\) is obtained from the following serial–parallel estimation model:
$$\dot{\hat{\hat{x}}}_{n} = D(u)u + \theta_{n}^{\text{T}} \phi_{n} \left( {\underline{{\hat{x}}}_{n} } \right) + \beta_{n} \left( {\hat{x}_{n} - \hat{\hat{x}}_{n} } \right),\quad \hat{\hat{x}}_{n} (0) = \hat{x}_{n} (0),$$(42)where \(\beta_{n} > 0\) is a design parameter.
Choose the adaptive law of parameter \(\theta_{n}\) as follows:
$$\dot{\theta }_{n} = \gamma_{n} \left( {\chi_{n} + \frac{{\delta_{n} }}{{\bar{\gamma }_{n} }}} \right)\phi_{n} \left( {\underline{{\hat{x}}}_{n} } \right) - \sigma_{n} \theta_{n}$$(43)where \(\gamma_{n} > 0\), \(\bar{\gamma }_{n} > 0,\) and \(\sigma_{n} > 0\) are design parameters.
The configuration of the aforementioned adaptive fuzzy control scheme is shown in Fig. 2.
Fig. 2 
Composite adaptive fuzzy dynamic surface control scheme

5 Stability Analysis
Theorem 1
For nonlinear output feedback system (1) with unmeasured states, under Assumption 1, the controller and the state observer are adopted by (38) and (19), the serial–parallel estimation models (23), together with the virtual control functions (28) and (33), adaptive laws of parameter (31), (36), and (43), guarantee that all signals of the closed-loop system consisting of (38) and (19) are bounded in probability. Moreover, the tracking error converges to a small neighborhood of zero by suitably choosing the design parameters.
Proof
Consider the Lyapunov function candidate:
The time derivative of V along with (22) and (25) is as follows:
By using Assumption 1 and Lemma 1, and the Young’s inequality, we have the following inequalities:
where \(p_{1} = 1 + \frac{1}{4}\left\| P \right\|^{2} \sum\nolimits_{i = 1}^{n} {L_{i}^{2} }\). From (19), (32), and (35), we have
From (19), (20), and (23), we have
Substituting (46)--(53) into (45) yields the following:
where \(\chi_{n + 1} = 0\), \(p{}_{2} = p_{1} + \left\| P \right\|^{2} + 2,\) and \(M_{1} = \frac{1}{4}\left\| P \right\|^{2} \sum\limits_{i = 1}^{n} {\varepsilon_{i}^{*2} } + \frac{1}{2}\left\| P \right\|^{2} \sum\limits_{i = 1}^{n} {d_{iM}^{2} } + \frac{1}{2}\left\| P \right\|^{2} + \frac{1}{2}\left| {\bar{\sigma }\bar{\sigma }^{\text{T}} } \right|^{2} + \frac{1}{2}\left\| P \right\|^{2} u_{\hbox{min} }^{2}\).
By using the Young’s inequality, we have the following inequalities:
Using the inequality \(\left| x \right| - x\tanh \left( {{x \mathord{\left/ {\vphantom {x \varsigma }} \right. \kern-0pt} \varsigma }} \right) \le 0.2785\varsigma = \varsigma^{\prime}\;\left( {\forall \varsigma > 0} \right)\) and substituting (55)--(58) into (54) yields the following:
where p = p 2 + p 1.
Substituting (36) into (59) yields the following:
where \(M = M_{1} + \sum\limits_{i = 1}^{n} {\frac{{\sigma_{i} }}{{2\gamma_{i} }}\theta_{i}^{{*{\text{T}}}} \theta_{i}^{*} } + \varsigma^{\prime}\).
Choose the design parameters λ min(Q), c i , β i , \(\bar{\gamma }_{i}\), σ i , and γ i such that \(\lambda_{\hbox{min} } (Q) - p > 0\), \(c_{i} - 3 > 0\), \(\frac{{\beta_{i} }}{{\bar{\gamma }_{i} }} - \frac{{k_{i}^{2} + 1}}{4} > 0,\) and \(\frac{{\sigma_{i} }}{{2\gamma_{i} }} - 2 > 0\), respectively.
Define
From (60), one can obtain
The solution of (61) can be written as follows:
where E(·) is probability expectation.
The above inequality means that E[V(t)] is bounded by M/c in mean square. Thus, according to (62), it is concluded that all the signals of the closed-loop system are SUUB in probability. Moreover, by adjusting the design parameters, the variables S 1 can be made arbitrarily small. □
Remark 1
Note that from (62), we can only conclude that the state observer errors and tracking error satisfy that \(E\left( {\left\| e \right\|} \right) \le \sqrt {{{2M} \mathord{\left/ {\vphantom {{2M} {c\lambda_{\hbox{min} } (P)}}} \right. \kern-0pt} {c\lambda_{\hbox{min} } (P)}}}\) and \(E\left( {\left| {S_{1} } \right|} \right) \le \sqrt {2{M \mathord{\left/ {\vphantom {M c}} \right. \kern-0pt} c}}\), we cannot conclude that the state observer errors and tracking errors asymptotically converge to zero. However, according to the authors in [8–21], we can make both the state observer errors and tracking errors to be small by increasing the design parameters c i and γ i , or decreasing σ i (i = 1, …, n).
6 Simulation Study
In this section, the feasibility of the proposed method and the control performances are illustrated by the following two examples.
Example 1
Consider the following SISO stochastic nonlinear systems:
where \(f_{1} (x_{1} ) = - 0.01x_{1}^{2}\), \(f_{2} ( \cdot ) = x_{2} \sin (x_{1} )\), \(g_{1} ( \cdot ) = {{x_{1} } \mathord{\left/ {\vphantom {{x_{1} } {1 + x_{1}^{2} }}} \right. \kern-0pt} {1 + x_{1}^{2} }}\), \(g_{2} ( \cdot ) = x_{2} \cos (x_{2} )\), \(d_{1} (x,\;t) = 0.1\sin (x_{1} x_{2} ) + x_{2}^{2} \cos (t)\), \(d_{2} (x,\;t) = {1 \mathord{\left/ {\vphantom {1 {\left( {10 + x_{1}^{2} x_{2}^{2} \sin^{2} t} \right)}}} \right. \kern-0pt} {\left( {10 + x_{1}^{2} x_{2}^{2} \sin^{2} t} \right)}}\), and \(\dot{w}(t)\) is assumed to be the Gaussian white noise with zero mean and variance 1.0.
The parameters in the hysteretic quantized input (2) are selected as α = 0.9, u min = 0.5, and the reference signal is assumed to be y r = sin(t).
Remark 2
By far, there exist some adaptive fuzzy or neural output feedback control methods [8–11, 13, 14] for a class of stochastic nonlinear systems based on backstepping technique, but these methods all did not consider the problem of input quantization. Therefore, they can not be applied to control the system (63). In addition, since this paper introduced the dynamic surface control technique into the backstepping control design, the proposed control method in this study can remove the restrictive conditions in [13, 14], i.e., the derivative of virtual control functions must be bounded by the known bounds.
The fuzzy membership functions for each fuzzy set is chosen as Gaussian-shaped membership functions, and they are given as follows:
we can construct the fuzzy logic systems \(\theta_{1}^{\text{T}} \varphi_{1} \left( {\hat{x}_{1} } \right) = \sum\limits_{j = 1}^{5} {\theta_{1j}^{\text{T}} } \varphi_{1j} \left( {\hat{x}_{2} } \right)\) and \(\theta_{2}^{\text{T}} \varphi_{2} \left( {\underline{{\hat{x}}}_{2} } \right) = \sum\limits_{j = 1}^{5} {\theta_{2j}^{\text{T}} } \varphi_{2j} \left( {\underline{{\hat{x}}}_{2} } \right)\) in terms of [26], where \(\theta_{1}^{\text{T}} = \left[ {\theta_{11} ,\;\theta_{12} ,\;\theta_{13} ,\;\theta_{14} ,\;\theta_{15} } \right]\) and \(\theta_{2}^{\text{T}} = \left[ {\theta_{21} ,\;\theta_{22} ,\;\theta_{23} ,\;\theta_{24} ,\;\theta_{25} } \right]\).
Choose observer gain vector \(K = [k_{1} ,\;k_{2} ]^{\text{T}} = [14,\;14]^{\text{T}}\) so that the matrix A is strict Hurwitz.
Construct the fuzzy state observer as follows:
Let β 1 = 0.9, β 2 = 0.9, and construct the serial–parallel estimation models:
Determine the virtual control function\(\hat{x}_{2,d}\), controller u, adaptive laws of parameter θ 1 and θ 2, and the first-order filter as follows:
The design parameters are chosen as c 1 = 5, c 2 = 5, β 1 = 1, β 2 = 1, τ 2 = 0.1, γ 1 = 10, γ 2 = 10, \(\bar{\gamma }_{1} = 0.01\), \(\bar{\gamma }_{2} = 0.01\), \(\sigma_{1} = \sigma_{2} = 50\), \(\eta_{2} = 0.2,\) and \(\varsigma = 1\).
The initial conditions are chosen as \(x_{1} (0) = 0.1\), \(x_{2} (0) = 0\), \(\hat{x}_{1} (0) = 0\), \(\hat{x}_{2} (0) = 0\), \(\hat{\hat{x}}_{1} (0) = 0\), \(\hat{\hat{x}}_{2} (0) = 0\), \(\theta_{1}^{T} (0) = [\theta_{11} (0),\;\theta_{12} (0),\;\theta_{13} (0),\;\theta_{14} (0),\;\theta_{15} (0)] = [0,\;0,\;0,\;0,\;0]\), \(\theta_{2}^{T} (0) = [\theta_{21} (0),\theta_{22} (0),\theta_{23} (0),\theta_{24} (0),\theta_{25} (0)] = [0,\;0,\;0,\;0,\;0].\)
The simulation results are shown in Figs. 3, 4 and 5, where Fig. 3 shows the trajectories of output y and y r ; Fig. 4 shows the trajectories of states x i i = 1, 2; Fig. 5 shows the trajectories of u and q(u).

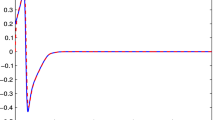
The trajectories of y (black line) and y r (red line)

The trajectories of state x 1 (black line) and the state x 2 (red line)

The trajectories of u (black line) and q(u) (red line)
For Example 1, we make a comparison between this paper with Ref. [13]. Since Ref. [13] only solves the stabilization control problem for stochastic nonlinear systems, we let y r = 0. In addition, we apply the way dealing with input quantization of this paper to the control method of Ref. [13] in order to solve the problem of input quantization. We apply the control methods of this paper (Case 1) and Ref. [13] (Case 2) to control the system of Example 1, respectively. The initial conditions and design parameters in Case 1 and Case 2 are chosen as the same as Example 1. The simulation result is shown Figs. 6 and 7. From Figs. 6 and 7, we can obtain that the control methods of this paper and Ref. [13] all can guarantee that all the variables are bounded, but the control method of this paper can achieve much better control performance than Ref. [13].

The trajectories of y (black line) of Case 1 and red line of Case 2

The trajectories of x 2 (black line) of Case 1 and red line of Case 2
Example 2 [27]
To further show the effectiveness of the proposed adaptive fuzzy controller, we consider the electromechanical system shown in Fig. 8.

Schematic of electromechanical system
The dynamics of the electromechanical system is described by the following equation:
Here \(D = \frac{J}{{K_{\tau } }} + \frac{{mL_{0}^{2} }}{{3K_{\tau } }} + \frac{{M_{0} L_{0}^{2} }}{{K_{\tau } }} + \frac{{2M_{0} R_{0}^{2} }}{{5K_{\tau } }}\), \(N = \frac{{mL_{0} G}}{{2K_{\tau } }} + \frac{{M_{0} L_{0} G}}{{K_{\tau } }}\), and \(B = \frac{{B_{0} }}{{K_{\tau } }}\); J is the rotor inertia, m is the link mass, M 0 is the load mass, L 0 is the link length, R 0 is the radius of the load, G is the gravity coefficient, B 0 is the coefficient of viscous friction at the joint, q(t) is the angular motor position (and hence the position of the load), τ is the motor armature current, and K τ is the coefficient which characterizes the electromechanical conversion of armature current to torque. L is the armature inductance, H is the armature resistance, K m is the back-emf coefficient, and V is the input control voltage. The values of the parameters are chosen as J = 1.625 Kg m2, m = 0.506 Kg, R 0 = 0.023 m, M 0 = 0.434 Kg, L 0 = 0.305 m, B 0 = 16.25 × 10−3 N m s rad−1, L = 25.0 × 10−3 H, H = 5.0 Ω, and K τ = K m = 0.90 N m A−1.
When we consider the stochastic disturbance and input quantization, and introduce the variable change x 1 = q, \(x_{2} = \dot{q}\), x 3 = τ, and qu = V, the dynamics given by (63) can be written in the following form:
here f 1(x 1) = 0, \(f_{2} (x_{1} ,\;x_{2} ) = - \frac{N}{D}\sin (x_{1} ) - \frac{B}{D}x_{2}\) and \(f_{3} (x_{1} ,\;x_{2} ,\;x_{3} ) = - \frac{{K_{m} }}{L}x_{2} - \frac{H}{L}x_{3}\), \(g_{1} (x_{1} ,\;x_{2} ,\;x_{3} ) = {{x_{1} } \mathord{\left/ {\vphantom {{x_{1} } {1 + x_{1}^{2} }}} \right. \kern-0pt} {1 + x_{1}^{2} }}\), \(g_{2} (x_{1} ,\;x_{2} ,\;x_{3} ) = \cos (x_{2} )\), \(g_{3} (x_{1} ,\;x_{2} ,\;x_{3} ) = \cos (x_{3} )\), and \(\dot{w}(t)\) is assumed to be the Gaussian white noise with zero mean and variance 1.0.
The parameters in the hysteretic quantized input (2) are selected as α = 0.8, u min = 0.4, and the reference signal is assumed to be y r = sin(t).
Define fuzzy membership function as follows:
we can construct the fuzzy logic systems \(\theta_{2}^{\text{T}} \varphi_{2} \left( {\underline{{\hat{x}}}_{2} } \right) = \sum\limits_{j = 1}^{5} {\theta_{2j}^{\text{T}} } \varphi_{2j} \left( {\underline{{\hat{x}}}_{2} } \right)\) and \(\theta_{3}^{\text{T}} \varphi_{3} \left( {\underline{{\hat{x}}}_{3} } \right) = \sum\limits_{j = 1}^{5} {\theta_{3j}^{\text{T}} } \varphi_{3j} \left( {\underline{{\hat{x}}}_{3} } \right)\) in terms of [26], where \(\theta_{2}^{\text{T}} = \left[ {\theta_{21} ,\;\theta_{22} ,\;\theta_{23} ,\;\theta_{24} ,\;\theta_{25} } \right]\) and \(\theta_{3}^{\text{T}} = \left[ {\theta_{31} ,\;\theta_{32} ,\;\theta_{33} ,\;\theta_{34} ,\;\theta_{35} } \right]\).
Choose observer gain vector \(K = [k_{1} ,\;k_{2} ,\;k_{3} ]^{\text{T}} = [14,\;14,\;14]^{\text{T}}\) so that the matrix A is a strict Hurwitz.
Construct the fuzzy state observer as follows:
Let β 1 = 0.9, β 2 = 0.9, β 3 = 0.9, and construct the serial–parallel estimation models.
Determine the virtual control function \(\hat{x}_{2,d}\), \(\hat{x}_{3,d}\), controller u, adaptive laws of parameter θ 1, θ 2, and θ 3, and the first-order filter as follows:
The design parameters in (70)--(76) are chosen as
c 1 = 7, c 2 = 7, c 3 = 7, τ 2 = 0.1, τ 3 = 0.1, γ 1 = 10, γ 2 = 10, γ 3 = 10, \(\overline{\gamma }_{1}\) = 0.01, \(\overline{\gamma }_{2}\) = 0.01, \(\overline{\gamma }_{3}\) = 0.01, σ 1 = σ 2 = σ 3 = 70, η 2 = 0.02, η 3 = 0.02, and \(\varsigma\) = 0.8.
The initial conditions are chosen as x 1(0) = 0.1, x 2(0) = 0.2, and the others initial values are chosen zero.
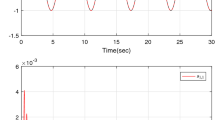
The simulation results are shown in Figs. 9, 10, and 11, where Fig. 9 shows the trajectories of output y and y r ; Fig. 10 shows the trajectories of states x i i = 1, 2, 3; Fig. 11 shows the trajectories of u and q(u).

The trajectories of y (black line) and y r (red line)

The trajectories of state x 1 (black line) the state x 2 (red line) and the state x 3 (blue line)

The trajectories of u (black line) and q(u) (red line)
From the simulation results in Examples 1 and 2, we know that the proposed control method can guarantee that all the variables are bounded. Moreover, the output can track the bounded reference signal y r .
7 Conclusions
In this paper, a composite adaptive fuzzy output feedback dynamic surface control approach has been developed for a class of uncertain stochastic nonlinear systems with hysteretic quantized input and without assuming the states being available for measurement. A hysteretic-type quantizer has been studied to avoid chattering. Fuzzy logic system has been used to approximate the unknown nonlinear functions, and a fuzzy state observer has been designed to estimate the unmeasured states. Based on the backstepping dynamic surface control design technique, a new fuzzy controller with the composite parameter adaptive laws has been developed. The proposed control method can not only solve the problems of states unmeasured and “explosion of complexity,” but solves the problem of the hysteretic quantized. It has been proven that all the variables of the closed-loop system are bounded in probability, and tracking error converges to a small neighborhood of zero. Although, this paper has made some achievements, the proposed control strategy has a disadvantage, i.e., the virtual control gains of the controlled system are “1.” If the virtual control gains are unknown nonlinear functions, then the proposed control method can not be applied. This also is our future research.
References
Ji, H.B., Xi, H.S.: Adaptive output-feedback tracking of stochastic nonlinear systems. IEEE Trans. Autom. Control 51(2), 355–360 (2006)
Pan, Z., Basar, T.: Backstepping controller design for nonlinear stochastic systems under a risk-sensitive cost criterion. SIAM J Control Optim 37(3), 957–995 (1999)
Deng, H., Krstic, M.: Output-feedback stochastic nonlinear stabilization. IEEE Trans. Autom. Control 44(2), 328–333 (1999)
Liu, S.J., Zhang, J.F., Jiang, Z.P.: Decentralized adaptive output feedback stabilization for large-scale stochastic nonlinear systems. Automatica 43(2), 238–251 (2007)
Wang, H.Q., Chen, B., Lin, C.: Adaptive neural tracking control for a class of stochastic nonlinear systems. Int. J. Robust Nonlinear Control 24(7), 1262–1280 (2014)
Yu, Z.X., Du, H.B.: Adaptive neural control for a class of uncertain stochastic nonlinear systems with dead-zone. J Syst Eng Electron 22(3), 500–506 (2011)
Wang, H.Q., Chen, B., Liu, X.P., Liu, K.F., Lin, C.: Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE Transactions on Cybernetics 43(6), 2093–2104 (2013)
Chen, W.S., Jiao, L.C.: Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans Syst Man Cybern B 40(3), 939–950 (2010)
Li, Y., Tong, S.C., Li, Y.M.: Observer-based adaptive fuzzy backstepping dynamic surface control design and stability analysis for MIMO stochastic nonlinear systems. Nonlinear Dyn. 69(3), 1333–1349 (2012)
Zhou, Q., Shi, P., Liu, H.H., Xu, S.Y.: Neural-network-based decentralized adaptive output-feedback control for large-scale stochastic nonlinear systems. IEEE Trans Syst Man Cybern B 42(6), 1608–1619 (2012)
Yu, Z.X., Li, S.G., Du, H.B.: Razumikhin–Nussbaum-lemma-based adaptive neural control for uncertain stochastic pure-feedback nonlinear systems with time-varying delays. Int. J. Robust Nonlinear Control 23(11), 1214–1239 (2013)
Wang, R., Liu, Y.J., Tong, S.C.: Decentralized control of uncertain nonlinear stochastic systems based on DSC. Nonlinear Dyn. 64(4), 305–314 (2011)
Tong, S.C., Li, Y., Li, Y.M., Liu, Y.J.: Observer-based adaptive fuzzy backstepping control for a class of stochastic nonlinear strict-feedback systems. IEEE Trans. Syst. Man Cybern. B Cybern. 41(6), 1693–1704 (2011)
Zhou, Q., Shi, P., Xu, S.Y., Li, H.Y.: Observer-based adaptive neural network control for nonlinear stochastic systems with time-delay. IEEE Trans Neural Netw Learn Syst 24(1), 71–80 (2013)
Hayakawaa, T., Ishii, H., Tsumurac, K.: Adaptive quantized control for linear uncertain discrete-time systems. Automatica 45(3), 692–700 (2009)
Hayakawaa, T., Ishii, H., Tsumurac, K.: Adaptive quantized control for nonlinear uncertain systems. Syst. Control Lett. 58(9), 625–632 (2009)
Liu, T., Jiang, Z.P., Hill, D.J.: Quantized stabilization of strict feedback nonlinear systems based on ISS cyclic-small-gain theorem. Math Control Signals Syst 24(1–2), 75–110 (2012)
Zhou, J., Wen, C., Yang, G.: Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control 59(2), 460–464 (2014)
Hojati, M., Gazor, S.: Hybrid adaptive fuzzy identification and control of nonlinear systems. IEEE Trans. Fuzzy Syst. 10(2), 198–210 (2002)
Wang, L.X.: Design and analysis of fuzzy identifiers of nonlinear dynamic systems. IEEE Trans. Autom. Control 40(1), 11–23 (1995)
Bellomo, D., Naso, D., Turchiano, B., Babuška, R.: Composite adaptive fuzzy control. In Proceedings of the 16th IFAC World Congress, Prague, Czech Republic, 2005
Pan, Y., Zhou, Y., Sun, T., Er, M.J.: Composite adaptive fuzzy H∞ tracking control of uncertain nonlinear systems. Neurocomputing 99, 15–24 (2013)
Xu, B., Shi, Z., Yang, C., Sun, F.: Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans Cybern 44(12), 2626–2634 (2014)
Wang, D., Huang, J.: Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans Neural Netw 16(1), 195–202 (2005)
Li, Y.M., Tong, S.C., Li, T.S.: Composite adaptive fuzzy output feedback control design for uncertain nonlinear strict-feedback systems with input saturation. IEEE Trans Cybern (2014). doi:10.1109/TCYB.2014.2370645
Wang, L.X.: Adaptive Fuzzy Systems and Control. Prentice Hall, Englewood Cliffs (1994)
Dawson, D.M., Carroll, J.J., Schneider, M.: Integrator backstepping control of a brush DC motor turning a robotic load. IEEE Trans. Control Syst. Technol. 2(3), 233–244 (1994)
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Nos. 61374113, 61074014).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gao, Y., Tong, S. Composite Adaptive Fuzzy Output Feedback Dynamic Surface Control Design for Uncertain Nonlinear Stochastic Systems with Input Quantization. Int. J. Fuzzy Syst. 17, 609–622 (2015). https://doi.org/10.1007/s40815-015-0071-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-015-0071-y