
Abstract
The effect of the intermittency of visual information in the bimanual coordination of an isometric force coordination task was investigated as a function of criterion force level. Eight levels of visual information intermittency (.2–25.6 Hz) were used in blocked fashion at each force level. Participants were required to produce a constant force output matching as accurately as possible the criterion force target. The results showed that performance improved as the intermittency of visual information was reduced—this effect being a function of force level. The distribution of the relative phase through the trial revealed a preference for the two hands to be coupled together (in-phase) at the slower rates of visual presentation (~.2 Hz). However, as the rate of visual feedback was increased (up to ~25.6 Hz), there was a transition to predominantly a negative correlation pattern (anti-phase). The pattern of bimanual coordination in this isometric tracking task is driven by the availability of information for error correction and the interactive influence of perceptual–motor constraints.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The study of manual control affords investigation of adaptive visual-motor activity. The essential operational feature of manual control experiments is that the operator can adjust his/her response on the basis of visual information from a computer screen that allows for investigation of a range of sensorimotor processes (Jagacinski and Flach 2003). This adaptive control paradigm has its roots in traditional manual tracking experiments (Jones 2000; Poulton 1974) and has foundational operational links to contemporary human–computer interaction applications.
In dynamic systems theory, the transition from one stable pattern to another is the result of a non-specific control parameter such as frequency of limb oscillations (Kelso 1995). This transition, however, is not confined to within-person bimanual movement in that it is present in the coupling of movements between persons (Schmidt et al. 1990) and with the environment (Wimmers et al. 1992). As such, stable modes of behavior in bimanual coordination have been suggested to be the result of perceptual–cognitive constraints (Mechsner et al. 2001), although this view has been challenged in favor of one that supports the interaction between neuromuscular factors and perceptual constraints (Swinnen et al. 2004). Studies on coordination of isometric force suggest that both neuromuscular factors (Swinnen et al. 2001) and availability of visual information have strong influences on the preferred coordination mode (Hu et al. 2011; Ranganathan and Newell 2008b).
The effect of target force output on adaptive control mechanisms has been examined across a range of force levels in both unimanual and bimanual isometric tasks (Hong et al. 2007; Masumoto and Inui 2012; Morrison and Newell 1998; Slifkin and Newell 2000). In the case of coordinated force production, Morrison and Newell (1998) demonstrated under conditions of full vision that as force level demands are increased, there is also an increase in performance error along with a shift in relative phase (anti- to in-phase) between the hands. Additional studies examining the effects of force on coordination (Hu et al. 2011; Masumoto and Inui 2012) have suggested that as force increases, the range of possible redundant solutions in the task space is reduced, channeling the organization of the system toward an in-phase relation (Morrison and Newell 1998). In a constant force task, the task dynamics of the bimanual isometric force paradigm can be described as a negative correlation between the hands. However, increased force magnitude tends to drive the system from this inverse relation in favor of a more positive correlation (Masumoto and Inui 2012).
In addition to influences of motoric constraints, isometric force tracking has been shown to be highly sensitive to perceptual information—visual information in particular (Newell and McDonald 1994; Newell et al. 2014). Manipulating both the precision (gain) and the rate (intermittency) of visual feedback has shown robust effects on the structure and variability of the force signal (Sosnoff and Newell 2006). The influence of visual information constraints on the coordination dynamics of bimanual movements (Schmidt et al. 1990; Wimmers et al. 1992) has been shown previously, but past work has not manipulated the perceptual information in an incremental way so as to adequately investigate the influence of perception on the coordination dynamics in isometric tasks.
Several studies (Hong and Newell 2008; Masumoto and Inui 2012; Ranganathan and Newell 2008b) have examined the role of perceptual constraints on isometric force coordination. In general, it has been shown that when the availability of visual information is reduced, force production between the two hands becomes more tightly coupled together in an in-phase mode as demonstrated by the distribution of the relative phase. In contrast, more information caused the individuals to show tendencies toward an anti-phase relation. The distribution of the Hilbert transform instantaneous relative phase values between the two effectors provided evidence suggestive of a switch of the preferred coordinative mode (i.e., the probability of being either in-phase or anti-phase) when visual information was reduced (Hong and Newell 2008; Ranganathan and Newell 2008b). These studies as well as others (Kennedy et al. 2014a, b) have demonstrated the role of visual constraints on coordination of isometric force and provide evidence that suggest the coordination mode adopted by the bimanual system scales to environmental and task information.
While availability of visual information and task dynamics promote an inverse relation between the force output of the hands (Morrison and Newell 1998), particularly at the low force levels (Masumoto and Inui 2012), in the absence of vision the intrinsic dynamics seems to channel the organization of the hands in a proportional way (Ranganathan and Newell 2008a) regardless of force level. This suggests an interaction between force and visual information. At the lower force levels, it is possible for either finger to channel the force requirements entirely due to high redundancy afforded in this context. However, the potential for redundant solutions is reduced as output approaches the maximum—the requirements of the task are beyond either of the individual fingers’ force output capacity. Thus, we expect a switch in the distribution of the relative phase toward an in-phase pattern with force level, indicating an apparent cooperation–competition complementarity between the intrinsic and task dynamics (Kelso and Engstrøm 2006).
Force and intermittency are interactive in terms of corrective mechanisms in this task. It can be argued that the isometric task has two main goals: reduce the overall bias and reduce overall variability, both to match the constant target. Because there is a relation between force level and its variability, assuming gain is held constant, low force levels are perceived with relatively less variability than high force levels. Presumably, then, at low force levels the main goal is to reduce the overall bias toward the target while variability reduction plays a large role in high force levels. Intermittency changes the availability of information reducing certainty in terms of both goals. Nevertheless, provided that the role of bias and variability are strongly influenced by the level of force, intermittency may affect low force levels in a different manner than in high force levels. Thus, an interaction between force level and information intermittency is expected to be observed in terms of force output error correction.
Isometric studies have not typically examined an appropriate range of force levels to capture the interaction of force magnitude and visual information. Therefore, the aim of the current study was to examine the interactive influence of intermittent visual information and force level on isometric force coordination and performance dynamics. It is expected that there will be an interaction between visual intermittency and force level in the coordination between the two hands—due to the cooperation–competition between task and intrinsic dynamics—and in the output measures—due to the dual-goal relation proposed to occur in this type of task.
Methods
Participants
There were 15 participants with a mean age of 22.9 years (±4.03 years) from The University of Georgia student population who participated as volunteers in the experiment. Seven of the participants were female, eight were male, and none had a previous history of neurological disorder. All participants were self-reported right-handed. Informed consent was obtained from all participants consistent with the approved IRB of The University of Georgia.
Apparatus
Subjects sat in a chair approximately 60 cm (23 in.) in front of a 20-in. LCD monitor. In front of the monitor were two Entran ELFS-B3 load cells that were mounted vertically on separate wooden blocks, spaced approximately 7.5 in. apart, and used to record the data during experimental trials. During an experimental trial, force output from both of the load cells was amplified and then sampled at 120 Hz by a 16-bit Coulbourn A/D board. The isometric program was coded using C++ software.
No physical constraints were used during testing procedures; however, subjects were instructed to keep their palm, wrist, forearm, and elbow flat against the table in the most comfortable position. Participants were asked to maintain this same arm configuration throughout the testing period. Participants were able to view their force output on a 20-in. Hp computer monitor with a resolution of 1920 horizontal pixels and 1080 vertical pixels. The pixel-to-Newton ratio was set at 64 p/N, meaning for every Newton of force applied to the load cell 64 pixels were illuminated, providing feedback about the subject’s force trace.
Procedures
Before testing procedures commenced, participants were given a familiarization block, in which subjects given a chance to explore and get used to the computer interface pressing on the load cells using both hands together in a coordinated manor. Familiarization block consisted of two trials, where each trial was performed under a different intermittency (visual information) condition chosen at random. Upon completion of the familiarization trial block, each subject’s maximal voluntary contraction (MVC) was collected. By way of abducting the index fingers of both hands, pressing with the lateral aspect of the distal phalange, subjects were asked to produce the maximum amount of force possible for a 6-s trial. This procedure was repeated three times, with a 20-s break in between each trial, and the average of the three trials was defined as the MVC. The average was taken as opposed to the maximal force achieved to account for any decrease in maximal attainable force as testing progressed. It has been shown that as two limbs work together in a bilateral force production task, MVC of the coordinated output will be equal to the summation of the two individual hands (Oda and Moritani 1994).
Testing conditions were pseudo-randomized. Force levels were randomized for each participant. Intermittency values were then randomized within each target force level (10, 30, 50, or 70 % MVC), and all trials per intermittency condition were completed at the prescribed force level before moving on to the next force. There were 5 trials per intermittency value for a total of 40 trials per force level and 160 total trials. Similar to Slifkin and Newell (1999), subjects were asked to produce isometric force to match a red target line that was displayed on the monitor. Feedback frequency about the subject’s force trace was intermittently occluded and defined as the number of pixels lit per second. Force output was displayed on the monitor as illuminated pixels perceived as yellow dots providing spatial–temporal representation of the subjects force–time series for given moment.
Eight intermittency values were used at .2, .4, .8, 1.6, 3.2, 6.4, 12.8, and 25.6 Hz. The lowest feedback frequency or largest time interval separating illuminated pixels was 5000 ms (.2 Hz), and the fastest rate of intermittency or smallest time interval was set at 40 ms (25.6 Hz). For example, in the largest intermittency condition (.2 Hz), exactly 5000 ms after the start of the trial, a single feedback point would be displayed, representing the participant’s force trajectory at that moment in time. No further feedback would be given until the second time interval (5000 ms) had elapsed. This process would continue on until the end of the trial. Thus, as feedback frequency increased from .2 to 25.6 Hz for a given trial, the time period between illuminated pixels representing the subjects force trace decreased, effectively increasing the information each participant received about their force output.
During all trials, subjects were instructed to minimize the deviations between their own force output (illuminated pixels) and the red target line as much as possible. The root-mean-squared error (RMSE) was presented to the subject on screen, after the completion of the trial to provide knowledge of results. Using the final 10 s of the trial, RMSE was calculated with [Σ(s i – f i )2/n – 1]1/2, where s i is the ith value of the target, f i is the ith force sample, and n is the number of data samples.
Data analysis
The first 4 s and last 1 s of each force–time series were omitted from all analyses. The initial 4 s was omitted in order to ensure that the time series did not include the period over which force was being adjusted and stabilized, and the final 1 s was omitted to help account for transient effects of fatigue that may have accumulated during the trial. All data were analyzed using MatLab 8.1 (The MathWorks, Inc.).
Task performance
The descriptive statistic used here to evaluate task performance was the root-mean-squared error (RMSE) of the force output. RMSE was used to determine how accurate on average the mean output for an individual trial was to the target level. A mean force that exactly matched the target force level would provide a measure equal to zero.
Time-dependent structure
Structure of force output was also assessed in the time domain using Sample entropy (Richman and Moorman 2000). Sample entropy (SampEn) is used here to determine the contribution of stochastic and deterministic processes of the output dynamics returning single measure quantifying the irregularity of the time series. SampEn is adapted from an earlier method of approximate entropy (ApEn). Unlike ApEn, SampEn is less sensitive to the data length and eliminates the bias of self-similar matches. This measurement represents the predictability of future values in the time series and is calculated by defining a template length (m) and noise amplitude (r) to compare a time series of length (N) data points. The number of data points (N) used for the analysis of SampEn was 1200, with m set to 2 and r set to .2 * SD. A lower value approaching zero would indicate a perfectly regular signal, such as a sine wave, whereas a value approaching two would suggest a signal that is much more irregular in time.
Coordination
Coordination was assessed using measures of correlation and relative phase between the hands. Pearson’s product moment correlation was used to determine the relation of the force output from each hand in the time domain, while the Hilbert transform relative phase was used to examine the instantaneous relative phase angle between the two force signals. The Hilbert transform provides the instantaneous amplitude and phase values by giving a real and imaginary part of the original force signal at each moment of the time series. Relative phase values are then calculated by taking the difference between phase angles from each force signal that are provided by the arch tangent of the real and imaginary parts of the complex, analytic signal (see Lamb and Stöckl 2014; Rosenblum and Kurths 1998). If the arch tangent (ranging from +90 to −90) was negative, 2π was added to the value to give a range of angles from 0 to 360. Because we are not interested in phase lag or lead of each finger, phase angles greater than 180 were mirrored by taking the absolute difference of the actual value from 360°. This provides a range of relative phase values from 0 to 180.
All dependent variables of interest were submitted to a three-way (4 by 8 by 5) repeated-measures ANOVA, with force level (10, 30, 50, and 70 % MVC), intermittency (.2, .4 .8, 1.6, 3.2, 6.4, 12.8, and 25.6 Hz), and trial (5) as the factors. The mean frequency bin (30 deg band) values from the Hilbert transform relative phase were submitted to a three-way (4 force by 8 intermittency by 6 frequency bin) repeated-measures ANOVA. The Bonferroni correction was used to compare the specific effects contributing to the general ANOVA. All statistics were deemed to be significant when there was less than a 5 % chance of making a type 1 error (p < .05). All statistical analyses were performed using IBM SPSS software.
Results
Task performance
The mean MVC for all participants was 25.2 N (±13.1 SD). Figure 1 shows the root-mean-squared error (RMSE) of the total force output as a function of intermittency for all force conditions (10, 30, 50, and 70 % MVC). There was a main effect of force level, F(1.182, 16.546) = 15.568, p < .001, intermittency, F(3.260, 45.641) = 23.963, p < .001, and trial, F(2.148, 30.072) = 10.108, p < .001 on the ability to match the force target line. RMSE increased with increments of both force and visual intermittency. Additionally, there was a two-way force-by-intermittency interaction, F(7.173, 100.425) = 2.311, p = .030, indicating that the error of the force output was mediated differentially by both the available information and criterion force level. While results of the ANOVA revealed a significant main effect for RMSE as a function of trial, this was primarily a result of an inflated RMSE score on the first trial of each condition, as the participant became familiar with the particular force or intermittency value.

Root-mean-squared error (RMSE) of the force output as a function of intermittency and force level
Post hoc analysis revealed that the 10, 30, 50, and 70 % MVC force levels were all significantly different from each other, while only the lower range of the intermittency conditions (.2, .4, .8 Hz) were significantly different from the shorter timescale feedback frequencies (1.6, 3.2, 6.4, 12.8, and 25.6 Hz). The interaction between force and intermittency revealed that the higher forces only showed significant reductions in error when intermittency was presented at feedback frequencies around 1.6 Hz. However, at the 10 % MVC condition, participants were able to significantly reduce RMSE when information was presented at .4 Hz.
Time-dependent structure
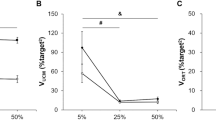
The structure of the force signal was measured in the time domain using SampEn. Figure 2 shows SampEn as a function of intermittency and force level. The results show irregularity of the time signal decreased with force, F(1.605, 22.470) = 8.355, p = .003, and increased as a function of visual information, F(1.907, 26.694) = 55.933, p < .001. The results also show a two-way force-by-intermittency interaction, F(6.742, 94.393) = 2.486, p = .023.

Sample entropy (SampEn) of the force output as a function of intermittency and force level
Post hoc analysis revealed that there were no significant differences in SampEn between force levels at the largest intermittency condition; however, as intermittency was decreased, SampEn was reduced at the higher force levels. The 10 and 30 % force levels showed no statistically significant differences at all intermittency values, while both 50 and 70 % MVC conditions were significantly different from all other force levels at the midrange values of feedback starting at rates faster than 1.6 Hz. SampEn did not show significant differences until visual feedback was presented at rates faster than .8 Hz for all force levels. Additionally, no differences were observed at feedback rates greater than 3.2 Hz at all force levels.
Coordination between hands
Correlation
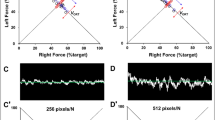
The correlation between the hands showed an effect of visual information, F(5.165, 72.310) = 77.065, p < .001, and trial, F(3.504, 49.053) = 4.504, p = .005. Figure 3 shows the correlation between force signals as a function of intermittency at each at the 10 % MVC force level. Post hoc analysis revealed the conditions with the greatest amount of visual information were significantly different from those with the least amount of visual feedback. As visual intermittency was reduced, the correlation decreased and even showed a negative relationship at the highest feedback rate (25.6 Hz). However, this trend does not appear to be influenced by the force level being produced.

Correlation of the raw force signals between the two fingers as a function of intermittency (Hz) and force level
Hilbert transform
Figures 4 and 5 show the frequency distribution (number of occurrences) of the instantaneous relative phase between the two hands at the 10 and 70 % MVC conditions, respectively. Phase values ranged from 0° (in-phase) to 180° (anti-phase) in 30° bin widths, with the first bin centered at 15°. Consecutive bins were, therefore, centered at 45°, 75°, 105°, 135°, and 165°. There was a significant force-by-intermittency interaction, F(1.159, 16.228) = 637.647, p < .001, and intermittency-by-phase interaction, F(8.414, 117.799) = 53.936, p < .001, on the distribution of the instantaneous relative phase values.

Number of occurrences of the instantaneous relative phase (via Hilbert transform) between the hands at 10 % MVC for each intermittency condition. Phase values range from 0° to 180° in increments of 30° for each bin width

Number of occurrences of the instantaneous relative phase (via Hilbert transform) between the hands at 70 % MVC for each intermittency condition. Phase values range from 0° to 180° in increments of 30° for each bin width
Post hoc analysis revealed that at the 25.6 Hz intermittency condition (full vision), the relative phase values tended toward an anti-phase relation. The bin centered around 15° (in-phase) was only significantly different from the 165° (anti-phase) bin, while the bin specifying a near anti-phase pattern was significantly different from all other phase values. When visual feedback was presented at a rate of 1.6 Hz, there were no significant differences across all relative phase values. However, at the .8 Hz intermittency condition, the lower range of phase values (15°, 45°, and 75°) became significantly different from all other bins, while the higher phase values were no longer significantly different from each other. The results demonstrate a greater probability of being near in-phase with less visual information and a shift to a pattern closer to anti-phase relation with increases in the feedback frequency.
Discussion
In the current experiment, we examined the interactive influence of force level and visual intermittency in a bimanual isometric force-tracking task. Error in force output increased as a function of force level and intermittency. Participants were able to improve task performance, indexed by a reduction in RMSE of the force output relative to the force target, as a function of decreased intermittency.
The ability to reduce error as feedback frequency was increased from .2 to 25.6 Hz was differentially modulated by the force level being produced. Organizational properties of the coordination between hands showed a shift in the distribution of relative phase values from compensatory (anti-phase) pattern to a more stable (in-phase) pattern as a function of incrementally increasing the intermittency of visual information. At the lowest force level, there was a strong probability for the two hands to organize in an anti-phase relation with faster timescales of visual feedback. However, at higher levels of force magnitude, while there was still a tendency toward an anti-phase relative coordination pattern, this was significantly reduced and an in-phase pattern was observed equally. In all conditions, when vision was essentially removed, the anti-phase mode was almost entirely annihilated.
Force–intermittency interaction
Tasks employing constant force production show an increase in dimension of force output with practice (Deutsch and Newell 2004), implying correction in force output is associated with increase in dimensionality of the force signal. With greater availability of visual information (i.e., reduced intermittency), there is a greater likelihood of correcting any deviations from the force target (Athreya et al. 2012). More recent work shows similar trends in measures of spectral slope and detrended fluctuation analysis (Athreya et al. 2012), and approximate entropy with practice (Studenka et al. 2014) providing additional evidence that the ability to produce a constant force is achieved by an increase in irregularity.
Irregularity of the force signal here indexed by SampEn showed an increase in the time-dependent structure of the force output with an increase in force level. This is consistent with the postulation that the ability to approximate a constant force target is associated with an increase in signal irregularity; hence, the increase in variance with force level (Slifkin and Newell 1999, 2000) leads to a decreased performance and, therefore, a greater predictability of the force dynamics. Furthermore, lack of differences in the irregularity between force levels at larger intermittencies seen in the present study suggests attraction to the intrinsic properties of the bimanual system (Kelso 1995) is predominant across a range of force magnitudes. The interaction between intrinsic and task dynamics emerges from the strength of the intrinsic dynamics at larger force levels as redundant solutions are reduced.
Prior studies (Sosnoff and Newell 2005) have shown that there is a limit on the perceptual capacity for adaptive control, in that larger force magnitudes inhibit the ability to utilize available information. The findings presented here are contrary to those earlier results. As fluctuations in force output become increasingly sensitive to adjustments in control mechanisms with force magnitude (Slifkin and Newell 2000), any attempt to correct perceived error could exaggerate the already inflated variability. Similarly, reducing temporal resolution would influence the ability to locate the force trace on the monitor; therefore, error could be exaggerated if corrections were made during periods of visual occlusion. As such, the task goal would be best achieved by a close approximation of the force target. Examination of the error at the 10 % MVC condition in Fig. 1 shows that there is a quick initial adjustment followed by a leveling off of the trend. Error reduction at lower force magnitudes is facilitated with small increases in feedback rate as any further force modulations could result in over correction. For this same reason, much more frequent visual information presentation is required at higher force levels before changes in performance can occur.
It is possible, however, that this is a result of spatial gain as studies have shown improvements in performance with increases in spatial acuity under conditions of full vision (Baweja et al. 2010). Furthermore, Hong, Brown, and Newell (2008) examined the compensatory nature of visual information by manipulating gain and intermittency. Though only one moderate force level was used, the resulting interaction between spatial and temporal information leads to the postulation that an optimal level of gain for a given intermittency exists.
Force–intermittency interaction isometric force coordination
Consonant with past studies on isometric force coordination (Hong and Newell 2008; Ranganathan and Newell 2008b), our results show a dependency on visual information and force level in order to meet demands of the task. Though the visual feedback employed here was not used to specify the relation between components, as was the case in past work (Kennedy et al. 2014a, b; Mechsner et al. 2001), visual information appears to constrain the system in a way that is driven by error correction and minimization. Thus, relative rather than absolute coordination is revealed suggesting intermittent stability around a preferred coordinative mode (Kelso 1994). Nevertheless, by manipulating visual intermittency in an incremental way, we were able to show that the preferred coordinative mode changed to another distributional pattern, indicating multistability. However, the probability of the relative phase tending toward φ = 180° was negatively influenced by force level. Even though the correlation between the hands was lowest at the extreme force level, the attraction to an anti-phase relation was not completely annihilated when information was sufficient. Thus, the results from the current study provide evidence supporting an interaction between perceptual and motor constraints (Newell and McDonald 1994; Swinnen et al. 2004; Swinnen and Wenderoth 2004).
Task dynamics in the current paradigm promote an inversely proportional relationship between the hands in order to maintain the criterion force level; however, this is mediated by the force magnitude. The number of possible degenerate solutions within the bimanual task space is greatest at lower force levels as it is possible for one hand alone to meet the force requirement. However, redundancy is reduced as force output approaches the maximum because MVC estimation is summative (Morrison and Newell 1998). In other words, there is a competition between the intrinsic property of the bimanual system to organize in an in-phase mode and the informational dynamics that channel the coordinative mode.
Consistent with our proposition that error correction channels the coordinative modes, Ranganathan and Newell (2008a) postulated visual feedback had a dual role in facilitating coordination dynamics. In one instance, vision allowed independent use of the fingers within trials (no correlation), while in another it facilitated the utilization of degenerate solutions between trials (negative correlation). Scholz et al. (2003) have also argued that within-trial analysis may be used to determine different control processes in a hypothetical hierarchical system. Yet, correlation may not be the most sufficient method for analysis within a given trial, as data are averaged over the length of the trial, and information about moment-to-moment covariation between the hands is lost. As revealed by the analysis of the Hilbert transform, there is a preference toward an anti-phase distribution, yet results of the correlation only show a zero to moderate negative correlation. For this reason, inference about the mode of control and coordinative processes should not be based only on measures of correlation.
As mentioned above, studies investigating bimanual coordination have typically done so by having participants learn to produce either a difficult (i.e., 90° relative phase) or complex (i.e., 5:3 polyrhythm) coordination pattern (Kovacs et al. 2010; Zanone and Kelso 1992). Lissajous feedback has also been used to reduce the attentional demands associated with controlling each limb individually and has been shown to significantly reduce the amount of time needed to learn these difficult patterns (Shea et al. 2015). Similarly, the feedback in the current study representing the sum of the two force signals, as opposed to giving information feedback from both hands, could aid in reducing attentional demands since both hands are not being tended to individually and, moreover, allow the hands to organize in a preferred way so long as error is reduced. Investigating the brain network of isometric force control Vaillancourt et al. (2006) have shown that the frequency of visual information presentation reduces motor error and differentially modulates the neural activation related to visuomotor processing in the cerebellum, parietal cortex, and premotor cortex. This distributed neural network appears to have similarities with brain regions that are involved in control and coordination of bimanual movements (Debaere et al. 2001, 2003). How force output magnitude influences this interaction between brain networks involved in visual processing and coordination should be further investigated in future studies.
In conclusion, scaling the presentation rate of visual information feedback revealed a shift in the distributions of coordination modes in an isometric force coordination task. The effects of force level also play a mediating role in the ability to stabilize an anti-phase coordination mode, revealing the respective influence of the individual constraints to action (Newell 1985). Additionally, it is proposed here that magnitude of force output does not limit the ability to utilize available visual information, but instead requires greater visual acuity (i.e., intermittency/gain) in order to support bimanual adaptive control processes. The results presented here provide support for the theoretical perspective of an interaction between perceptual and motor constraints (Hu et al. 2011; Newell and McDonald 1994; Swinnen and Wenderoth 2004).
References
Athreya DN, Van Orden G, Riley MA (2012) Feedback about isometric force production yields more random variations. Neurosci Lett 513:37–41. doi:10.1016/j.neulet.2012.02.002
Baweja HS, Kennedy DM, Vu J, Vaillancourt DE, Christou EA (2010) Greater amount of visual feedback decreases force variability by reducing force oscillations from 0–1 and 3–7 Hz. Eur J Appl Physiol 108:935–943. doi:10.1007/s00421-009-1301-5
Debaere F, Swinnen SP, Béatse E, Sunaert S, Van Hecke P, Duysens J (2001) Brain areas involved in interlimb coordination: a distributed network. NeuroImage 14:947–958. doi:10.1006/nimg.2001.0892
Debaere F, Wenderoth N, Sunaert S, Van Hecke P, Swinnen SP (2003) Internal vs external generation of movements: differential neural pathways involved in bimanual coordination performed in the presence or absence of augmented bisual feedback. NeuroImage 19:764–776. doi:10.1016/S1053-8119(03)00148-4
Deutsch KM, Newell KM (2004) Changes in the structure of children’s isometric force variability with practice. J Exp Child Psychol 88:319–333. doi:10.1016/j.jecp.2004.04.003
Hong SL, Newell KM (2008) Entropy compensation in human motor adaptation. Chaos 18:013108. doi:10.1063/1.2838854
Hong SL, Lee MH, Newell KM (2007) Magnitude and structure of isometric force variability: mechanical and neurophysiological influences. Mot Control 11:119–135
Hong SL, Brown AJ, Newell KM (2008) Compensatory properties of visual information in the control of isometric force. Percept Psychophys 70:306–313. doi:10.3758/pp.70.2.306
Hu X, Loncharich M, Newell KM (2011) Visual information interacts with neuromuscular factors in the coordination of bimanual isometric force. Exp Brain Res 209:129–138. doi:10.1007/s00221-010-2528-4
Jagacinski RJ, Flach JM (2003) Control theory for humans: Quantitative approaches to modeling performance. Erlbaum, Mahwah
Jones RD (2000) Measurement of sensory-motor control performance capacities: Tracking tasks. In: Bronzino JD (ed) The biomedical engineering handbook, 2nd edn. CRC Press, Boca Raton, pp 149–161
Kelso JAS (1994) Elementary coordination dynamics. In: Swinnen SP, Heuer H, Massion J, Casaer P (eds) Interlimb coordination: neural, dynamical, and cognitive constraints. Academic Press, San Diego, pp 301–318
Kelso JAS (1995) Dynamic patterns: the self organization of brain and behavior. The MIT Press, Cambridge
Kelso JAS, Engstrøm DA (2006) The complementary nature. The MIT Press, Cambridge
Kennedy DM, Boyle JB, Rhee J, Shea CH (2014a) Rhythmical bimanual force production: homologous and non-homologous muscles. Exp Brain Res 233:181–195. doi:10.1007/s00221-014-4102-y
Kennedy DM, Boyle JB, Wang C, Shea CH (2014b) Bimanual force control: cooperation and interference? Psychol Res. doi:10.1007/s00426-014-0637-6
Kovacs AJ, Buchanan JJ, Shea CH (2010) Impossible is nothing: 5:3 and 4:3 multi-frequency bimanual coordination. Exp Brain Res 201:249–259
Lamb PF, Stöckl M (2014) On the use of continuous relative phase: review of current approaches and outline for new standard. Clin Biomech 29:484–493
Masumoto J, Inui N (2012) Effects of force levels on error compensation in periodic bimanual isometric force control. J Mot Behav 44:261–266. doi:10.1080/00222895.2012.690354
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73. doi:10.1038/35102060
Morrison S, Newell KM (1998) Interlimb coordination as a function of isometric force output. J Mot Behav 30:323–342
Newell KM (1985) Coordination, control and skill. In: Goodman D, Wilberg RB, Franks IM (eds) Differing perspectives in motor learning, memory, and control. North-Holland, Amsterdam, pp 295–317
Newell KM, McDonald PV (1994) Information, coordination modes and control in a prehensile force task. Hum Mov Sci 13:375–391. doi:10.1016/0167-9457(94)90046-9
Newell KM, Studenka BE, Hu X (2014) Visual information in the coordination and control of isometric force. In: Hoffman RR, Hancock PA, Scerbo M, Parasuraman R, Szalma JL (eds) The Cambridge handbook of applied perception research. Cambridge University Press, Cambridge
Oda S, Moritani T (1994) Maximal isometric force and neural activity during bilateral and unilateral elbow flexion in humans. Eur J Appl Physiol 69:240–243
Poulton EC (1974) Tracking skill and manual control. Academic Press, New York
Ranganathan R, Newell KM (2008a) Motor synergies: feedback and error compensation within and between trials. Exp Brain Res 186:561–570. doi:10.1007/s00221-007-1259-7
Ranganathan R, Newell KM (2008b) Online feedback and the regulation of degrees of freedom in motor control. Hum Mov Sci 27:577–589. doi:10.1016/j.humov.2008.01.002
Richman JS, Moorman JR (2000) Physiological time-series analysis using approximate entropy and sample entropy. Am J Physiol Heart C 278:H2039–H2049
Rosenblum M, Kurths J (1998) Analysing synchronization phenomena from bivariate data by means of the Hilbert transform. In: Kantz H, Kurths J, Mayer-Kress G (eds) Nonlinear analysis of physiological data. Springer, Berlin Heidelberg, pp 91–99
Schmidt RC, Carello C, Turvey MT (1990) Phase-transitions and critical fluctuations in the visual coordination of rhythmic movements between people. J Exp Psychol Hum 16:227–247. doi:10.1037//0096-1523.16.2.227
Scholz JP, Kang N, Patterson D, Latash ML (2003) Uncontrolled manifold analysis of single trials during multi-finger force production by persons with and without Down syndrome. Exp Brain Res 153:45–58. doi:10.1007/s00221-003-1580-8
Shea CH, Buchanan JJ, Kennedy DM (2015) Perception and action influences on discrete and reciprocal bimanual coordination. Psychon Bull Rev. doi:10.3758/s13423-015-0915-3
Slifkin AB, Newell KM (1999) Noise, information transmission, and force variability. J Exp Psychol Hum Percept Perform 25:837–851
Slifkin AB, Newell KM (2000) Variability and noise in continuous force production. J Mot Behav 32:141–150
Sosnoff JJ, Newell KM (2005) Intermittent visual information and the multiple time scales of visual motor control of continuous isometric force production. Percept Psychophys 67:335–344
Sosnoff JJ, Newell KM (2006) Information processing limitations with aging in the visual scaling of isometric force. Exp Brain Res 170:423–432. doi:10.1007/s00221-005-0225-5
Studenka BE, King AC, Newell KM (2014) Differential time scales of change to learning frequency structures of isometric force tracking. J Exp Psychol Hum Percept Perform 40:1629–1640. doi:10.1037/a0037113
Swinnen SP, Wenderoth N (2004) Two hands, one brain: cognitive neuroscience of bimanual skill. Trends Cogn Sci 8:18–25. doi:10.1016/j.tics.2003.10.017
Swinnen SP, Dounskaia N, Levin O, Duysens J (2001) Constraints during bimanual coordination: the role of direction in relation to amplitude and force requirements. Behav Brain Res 123:201–218
Swinnen SP, Li Y, Wenderoth N, Byblow W, Stinear C, Dounskaia N, Wagemans J (2004) Perception-action coupling during bimanual coordination: the role of visual perception in the coalition of constraints that govern bimanual action. J Mot Behav 36:394–398. doi:10.1080/00222895.2004.11008005
Vaillancourt DE, Mayka MA, Corcos DM (2006) Intermittent visuomotor processing in the human cerebellum, cortex, and premotor cortex. J Neurophys 95:922–931
Wimmers RH, Beek PJ, van Wieringen PCW (1992) Phase-transitions in rhythmic tracking movements—a case of unilateral coupling. Hum Mov Sci 11:217–226. doi:10.1016/0167-9457(92)90062-G
Zanone PG, Kelso JAS (1992) Evolution of behavioral attractors with learning nonequilibrium phase transition. J Exp Psychol Hum Percept Perform 18:403–421
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lafe, C.W., Pacheco, M.M. & Newell, K.M. Bimanual coordination and the intermittency of visual information in isometric force tracking. Exp Brain Res 234, 2025–2034 (2016). https://doi.org/10.1007/s00221-016-4606-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-016-4606-8