
Abstract
The present findings demonstrate that when participants are provided a Lissajous display with cursor indicating the position of the limbs and a template illustrating the desired movement pattern they can rapidly (10 min) and effectively (continuous relative phase errors and variability ~10°) tune in a difficult 5:3 bimanual coordination pattern and without additional practice re-tune their responding to an equally difficult 4:3 coordination pattern. The findings indicate the extreme difficulty associated with producing complex polyrhythms in previous experiments has been due to split attention when Lissajous feedback has been provided and inability of the participant to detect and correct coordination errors when only provided vision of the limbs. Effective transfer to the 4:3 polyrhythm without previous practice suggests that the perception–action system’s capabilities are extensive. The present findings when viewed in the context of recent experiments using similar protocols suggest that much, but not all, of the difficulty associated with producing a variety of bimanual coordination tasks should be viewed in terms of perceptual constraints imposed by the testing environment.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The findings from bimanual 1:1 and polyrhythmic coordination patterns of the fingers, wrists, or arms have been used extensively to develop theories of interlimb coordination. With the exception of 1:1 in-phase (ϕ = 0°) and anti-phase (ϕ = 180°) coordination patterns, other relative phase patterns (e.g., ϕ = 90°) are not inherently stable (Kelso 1984; Kelso et al. 1986). This pattern of results has been explained using concepts taken from nonlinear dynamics and modeled using nonlinearly coupled limit cycle oscillators (Haken et al. 1985) perturbed by stochastic forces (Schöner et al. 1986).
This tendency toward preferred coordination patterns has also been observed in bimanual multi-frequency rhythmic tasks. Individuals that have not had extensive musical training typically require one to two practice sessions to develop the ability to tap simple harmonic ratios such as 2:1 or 3:1 (Peper et al. 1995a, b; Summers et al. 1993; Walter et al. 1998). The study of polyrhythmic performance with ratios such as 3:4 or 3:5 has also been examined with tapping tasks (Boonstra et al. 2007; Klapp et al. 1998; Kurtz and Lee 2003) and most often with skilled musicians (Boonstra et al. 2007; Peper et al. 1995a, b; Summers et al. 1993; Walter et al. 1998). The performance of multi-frequency ratios requiring continuous limb motion, however, appear to pose quite difficult challenges for the nervous system (Treffner and Turvey 1993; Sternad et al. 1999a, b; Summers et al. 2008; Swinnen et al. 1997a). Indeed, some complex polyrhythms (e.g., 2:3, 4:3, 5:3) were not only thought to be difficult, but were thought to be virtually impossible to perform with the limbs moving continuously (Fraisse 1946; Summers et al. 2002) without some form of physical assistance (e.g., pendulums, Treffner and Turvey 1993).
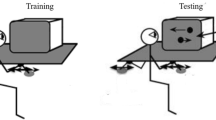
When polyrhythmic performance has been documented in bimanual tasks requiring continuous motion of the limbs it typically emerged under conditions that created a frequency detuning between the limbs. For example, performance of 3:5 and 2:3 ratios were demonstrated when swinging pendulums of disparate length and mass so that each limb swung a pendulum with a different natural frequency (Treffner and Turvey 1993). Another example required tracing circles of disparate amplitudes, such as a 15 cm diameter circle with the left arm and a 3 cm diameter circle with the right arm, that resulted in the spontaneous emergence of short-lived polyrhythmic episodes as movement frequency was increased (Buchanan and Ryu 2006). In each of the above examples, the ability to output a polyrhythmic ratio required the creation of a frequency detuning between the limbs. One noteworthy example was provided by Mechsner et al. (2001). Mechsner et al. demonstrated that a complex 4:3 polyrhythm could be performed relatively well when perceptual symmetry was established. Participants attempted to move two visible flags by way of cranks hidden under the table. The gears for one flag were set at 1:1 so that each full turn of the crank resulted in one full circle of that flag while the gears for the other flag were set at 4:3 requiring a ¾ turn to produce one full revolution of that flag. The participant was instructed to turn the cranks so the movement of the flags were coordinated in an in-phase (0°) or anti-phase (180°) pattern. Provided this perceptual information, participants were able to perform the 1:1 in-phase and anti-phase flag patterns (i.e., an actual 4:3 bimanual polyrhythm) relatively well after only 20 min of practice.
Interestingly, Bingham and colleagues in a series of experiments (e.g., Bingham 2004b; Bingham et al. 1999; Bingham et al. 2000; Zaal et al. 2000; Wilson et al. 2005a, b, 2009) over the last 10 years have argued and provided compelling evidence that coupling in coordinated movement is perceptual in nature with stability largely a function of perceptual information available in the testing environment and the participants sensitivity to this information. It is also interesting to note that Bingham (2004a) has developed a mathematical model that characterizes relative phase as a perceptual variable. This perceptually driven model of coupled oscillators produces patterns of stability and attraction similar to the HKB model. The implication of these findings is that if participants can be provided perceptual information that allows them to effectively perceive the goal coordination pattern and their coordination errors, they can efficiently correct these errors (see Wilson et al. 2005a).
Recent experiments (Kovacs et al. 2009a, b, c), partially based on the notion that some of the difficulties in producing a variety of bimanual coordination patterns are perceptually based, have shown remarkably stable performance of 1:1 bimanual coordination pattern with various phase lags (0°–180° in 30° increments) and multi-frequency bimanual coordination patterns (2:1 and 3:2) can emerge after minimal (5 min) practice when metronomes are not used, vision of the limbs is blocked, and feedback of the two limbs is portrayed as a single point in a Lissajous portrait. In a recent experiment (Kovacs et al. 2009a) requiring 1:1 bimanual coordination with a 90° phase lag, Lissajous feedback was provided in a self-paced condition and in a condition with an auditory metronome to pace the movements at 1 Hz. The Lissajous plot was created by having the movement of right limb move a dot (cursor) horizontally with flexion moving the dot to the left and extension moving the dot to the right. Further, the movement of the left limb resulted in the dot moving vertically with extension of the left limb moving the dot up and flexion moving the dot down. Thus, the Lissajous information portrayed the joint position of the two limbs as a single dot in the display. Similarly, a goal template was displayed that portrayed the Lissajous pattern required for the particular coordination pattern. For example, the goal template for a 1:1 task with 90° phase lag was created by plotting on the Lissajous two sine waves with a 90° phase lag. The result was a perfect circle that could be used by the participant to guide their movements. Relative phase error after 5 min of practice averaged 30° with the auditory metronome present and <10° in the self-paced condition even though the frequency was nearly identical for the two groups. Performance variability was also substantially smaller in the self-paced compared to the metronome condition. In both the self-paced and metronome paced conditions, the limbs of the participants were covered during the experiment. Swinnen et al. (1997b), for example, using Lissajous feedback but with an auditory metronome and vision of the limbs required 3 days of practice for participants to achieve relative phase lags of 90° that approached that in the self-paced condition in the Kovacs et al. (2009a, b) experiments after only 5 min of practice. Kovacs et al. (2009b) have also demonstrated that the elimination of visual metronomes when Lissajous information is provided allows for a variety of patterns ranging from 30° to 150° to be effectively performed with only 5 min of practice.
In a third experiment Kovacs et al. (2009c), using a similar experimental protocol, found participants were just as effective in producing 2:1 and 3:2 bimanual coordination tasks following minimal practice as had been demonstrated using 1:1 coordination patterns with various phase lags (Kovacs et al. 2009a, b) but only when vision of the limbs was blocked. This experiment contrasted conditions where the participants limbs were either visible or blocked from view. Remarkably, permitting vision of the limbs while presenting Lissajous feedback resulted in quite poor performance while performance when the limbs were covered was very effective. Indeed, performance on the polyrhythms after only 5 min of practice was similar to that found by Swinnen et al. (1997a) after 5 days of practice of a 2:1 ratio while providing Lissajous feedback. The difference appears to be related to vision of the limbs and metronome used in the Swinnen et al. (1997a) experiment. Taken together these experiments demonstrated that the elimination of attentional demands linked to vision of the limbs and auditory or visual pacing signals allows for the rapid tuning of relatively difficult bimanual coordination patterns when integrated feedback in the form of a Lissajous portrait was provided.
The purpose of the present experiment was to determine if participants provided a testing environment that meets the conditions above could effectively tune in (produce) a continuous 5:3 bimanual coordination pattern after 10 min of practice, and then without additional practice transfer the acquired skill to a 4:3 bimanual pattern. Effective performance of the 5:3 pattern without extensive practice would be remarkable, but to effectively perform the 4:3 transfer task, with virtually no practice, would clearly demonstrate that action constraints on polyrhythmic performance may be quickly overcome when attention is focused solely on the information provided in the Lissajous plot (i.e., cursor representing the joint position of the two limbs and goal template). In addition, it will be important to determine if the 5:3 and 4:3 polyrhythms, which are considered quite difficult, result in larger continuous relative phase errors and variability than observed in what would be considered easier bimanual coordination tasks (e.g., 1:1 with various phase lags and 2:1 and 3:2 polyrhythms) previously tested under similar conditions (Kovacs et al. 2009a, b, c). Findings that bimanual coordination errors and variability do not appreciably change across various coordination patterns when the perceptual information is similar and attentional demands are reduced would suggest that bimanual coordination difficulty should be viewed in terms of perceptual demands (e.g., Wilson et al. 2003) and not in terms of the phase lag or frequency ratios per se.
Method
Participants
Right-handed undergraduate students (N = 10) volunteered to participate in the experiment after reading and signing a consent form approved by the IRB for the ethical treatment of experimental participants. None of the participants was an active musician or had significant musical training. Each participant received class credit for their participation.
Apparatus
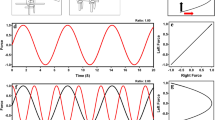
The apparatus consisted of two horizontal levers and a projector (Fig. 1a). The levers were affixed at the proximal ends to near frictionless vertical axles. The axles, which rotated freely in ball bearing supports, allowed the levers to move in the horizontal plane over the table surface. Near the distal end of each lever, a vertical handle was attached. The positioning of the handle was adjustable. When the participant rested their forearm on the lever, their elbow aligned over the axis of rotation, they could comfortably grasp the handle (palm vertical). The horizontal movement of the levers were monitored (200 Hz) by potentiometers that were attached to the lower ends of the axles. The online data were used to present a cursor (as a circle) on a screen directly to the front of the participant with the motion of the left lever moving the cursor up (extension) and down (flexion). The motion of the right lever resulted in moving the cursor left and right. Projected onto the screen was the required Lissajous plot that represented a 5:3 or 4:3 pattern of continuous sinusoidal motion (Fig. 1b, c). The cursor and Lissajous plot were generated with customized software and displayed with a projector mounted above and behind the participant.

Experimental setup (a) and goal Lissajous plots for 5:3 (b) and 4:3 (c) polyrhythms. Examples of the normalized left and right limb displacements (d), left (e) and right (f) phase planes, Lissajous plot (g), and continuous relative phase (h) for a typical participants on the retention test. The same measures i–m are provided for the same participant on the 4:3 transfer test
Procedure
Participants sat at a table with their forearms resting on the levers that limited elbow motion to flexion–extension in the horizontal plane. Participants were seated on a height adjustable chair with the horizontal eye line corresponding with the midway point on the Lissajous plot projected onto the screen. Participants were informed that they were to attempt to move their right and left limbs back and forth (approximately 60°) and that the right limb should cycle five times for every three cycles of the left limb in order to match the goal Lissajous template. After each trial, in which the cycle frequency of the faster moving limb was <1 Hz, the experimenter encouraged the participants to increase their movement speed without disrupting the intended movement pattern. All participants completed ten acquisition trials (60 s each). They were also informed that a retention and transfer test would be administered after a 15-min retention interval. The retention test was conducted using the Lissajous plot and goal template for the 5:3 polyrhythm (Fig. 1b) and the transfer test used a goal template for a 4:3 polyrhythm (Fig. 1c).
Measures and data reduction
All data reduction was performed using MATLAB. The potentiometer signals representing the limbs’ displacements were low-pass filtered with a second order dual pass Butterworth with a cutoff frequency of 10 Hz. Prior to further computation, displacement and velocity traces were normalized in two steps: first the mean of each data series was subtracted from each data point in the series to center the time series around zero and, second, each data point in the centered time series was divided by the highest absolute value (minimum or maximum) of the time series. Velocity and acceleration signals were computed with each signal filtered (Butterworth, 10 Hz) before performing the next differentiation. The analyses presented will focus on both bimanual coordination performance of the required multi-frequency ratio and unimanual motion performance of the right and left limbs.
Unimanual measures
Cycle durations and cycle stability were computed on a cycle by cycle basis with each cycle representing every other zero crossing (Z Ci and Z Ci+2) in the mean centered displacement trace (Cycle duration = Z Ci+2 − Z Ci). Cycle stability was defined as the standard deviation of the cycle to cycle durations. Windows between adjacent pairs of zero crossings in the displacement trace were defined in order to compute an index of movement harmonicity (H) (Guiard 1993). Each non-overlapping time window comprised a single movement reversal. Within each time window all deflections of the normalized acceleration trace were identified. When the acceleration trace was positive (negative displacement) within this window, H was computed as the ratio of minimum to maximum acceleration. Conversely, when the acceleration trace was negative (positive displacement) within this time window, H was computed as the absolute ratio of maximum to minimum acceleration. When a single peak (sinusoidal acceleration) occurred in the acceleration trace within this window the value of H was set to 1, indicating harmonic motion of the limb. If the acceleration trace crossed from positive to negative (or vice versa) within this window, the value of H was set to 0, indicating inharmonic motion. Finally, the individual harmonicity values of each time window for a trial were averaged yielding a global estimate of H.
Bimanual measures
The individual limb mean cycle frequencies were used to compute a frequency ratio of right arm to left arm motion. This measure provides a temporal measure of goal attainment that is independent of limb coordination tendencies and actual limb trajectories. To examine the spatial–temporal coordination of the limbs’ motion, a continuous relative phase between the two limbs was computed. The phase angle (θ i ) for each limb (i = r,l) was computed for each sample of the displacement time series as follows (Kelso et al. 1986):
with X i representing the normalized position of the right and left limbs and dX i /dt the instantaneous normalized velocities for the right and left limbs.
Next, the individual phase angles θ i were unwrapped by finding absolute jumps greater than 2π and adding appropriate multiples of 2π to each data point following the jump. After the unwrapping, the continuous relative phase between the right and left phase angles was computed for each epoch comprising five complete cycles of the right limb (fast moving) for the 5:3 ratio and for each epoch comprising four complete cycles for the 4:3 ratio. The continuous relative phase values over each epoch were subtracted from a relative phase representing a pure 5:3 or 4:3 ratio between harmonic oscillators to generate a relative phase error, with the faster oscillator representing motion of the right limb. The phase errors in each epoch were used to compute absolute and variable errors across the trial. Absolute error provides a measure of goal attainment, with smaller values representing more accurate performance of the required continuous polyrhythm and variable error represents the stability of performance.
Results
In general, the limb trajectories were sinusoidal and the Lissajous plots and continuous relative phase error plots reflect relatively precise performance of both polyrhythms. Examples of one participant on the 5:3 and 4:3 tests are provided in Fig. 1d–m. Mean harmonicity, mean cycle duration, and cycle duration variability data were analyzed in 2 Test × 2 Limb (left, right) ANOVAs with repeated measures on limb and these results are presented in the unimanual performance section. Mean absolute error and variability in continuous relative phase errors as well as the frequency ratio data were analyzed in a Test (5:3 retention test, 4:3 transfer test) ANOVA and these results are presented in the bimanual performance section. Duncan’s new multiple range test and simple main effects post hoc tests were performed when appropriate (α = 0.05).
Unimanual performance
The analysis failed to detect a difference in hamonicity (Fig. 2a) between the 5:3 retention test and the 4:3 transfer test, F(1,18) < 1, P > 0.05. Right arm motion was more harmonic than left arm motion, F(1,18) = 179.95, P < 0.01. The Condition × Limb interaction was also significant, F(1,18) = 19.97, P < 0.01. Simple main effects analysis failed to indicate a difference between the H values for the right, faster moving limb, on the 5:3 (M = 0.870, S EM = 0.06) and 4:3 (M = 0.83, S EM = 0.07) tests, but did detect a difference for the left, slower moving limb, on the 5:3 (M = 0.28, S EM = 0.10) and 4:3 (M = 0.54, S EM = 0.05) tests.

Mean harmonicity (a), cycle duration variability (b), and cycle duration (c) for the left and right limbs on the retention and transfer tests. Mean frequency ratio (d), absolute error (e) and variability (f) in continuous relative phase for the retention and transfer tests. Variability (g) and absolute error (h) in continuous relative phase from the present experiment are compared with recent experiments using similar protocols testing phase lags of 0°–180° in 30° increments (Kovacs et al. 2009b) and multi-frequency (2:1 and 3:2, Kovacs et al. 2009c) bimanual coordination patterns. Note that the shapes of the Lissajous templates used for the various conditions are provided above the variability bars in g
As expected given the different frequency requirements, the analysis of the mean cycle duration data indicated a main effect of limb, F(1,18) = 156.96, P < 0.01, with the right limb on average having a shorter cycle duration than the left limb on both tests (Fig. 2c). The main effect of test F(1,18) < 1, P > 0.05, was not significant, but the Test x Limb interaction, F(1,18) = 14.47, P < 0.05, was significant. Simple main effects analysis failed to indicate a difference between the mean cycle durations for the right, faster moving limb, on the 5:3 (M = 766.00 ms, S EM = 78 ms) and 4:3 (M = 805.94 ms, S EM = 83 ms) tests, but did detect a difference for the left, slower moving limb, on the 5:3 (M = 1,275.54 ms, S EM = 130 ms) and 4:3 (M = 1,071.50 ms, S EM = 110 ms) tests suggesting that participants accomplished the new polyrhythm by adjusting the movement of their left limb.
The analysis of the cycle duration variability data (Fig. 2b) failed to indicated main effects of test, F(1,18) < 1, P > 0.05, or a Test × Limb interaction, F(1,18) < 1, P > 0.05. Cycle duration was more variable, F(1,18) = 16.29, P < 0.01, for the left limb (M = 91.15 ms, S EM = 12 ms) than the right limb (M = 60.83 ms, S EM = 7 ms).
Bimanual performance
Participants were exceptionally good at producing five cycles of right arm motion for every three cycles of left arm motion and were able to spontaneously adjust their motion to produce four cycles of right arm motion for every three cycles of left arm motion (Fig. 2d). The analysis of absolute error in continuous relative phase, F(1,18) = 1.14, P > 0.05, and variability in continuous relative phase, F(1,18) = 2.03, P > 0.05, failed to indicate differences between tests (Fig. 2e, f). The cycle frequency ratio revealed a main effect of test, F(1,18) = 38,076.10, P < 0.01, indicating a higher ratio on the 5:3 test (M = 1.66, S EM = 0.001) than on the 4:3 test (M = 1.33, S EM = 0.001). Note that the ratios achieved matched precisely the goal ratios.
Discussion
Remarkably, participants effectively tuned in the continuous 5:3 coordination pattern after 10 min of practice, and then on the first attempt re-tuned to the unpracticed 4:3 coordination pattern. Note that the 5:3 and 4:3 coordination patterns were thought to be virtually impossible to achieve in continuous motion tasks even after extensive practice. The level of bimanual performance attained in the current experiment was remarkable, especially when compared to the performance levels achieved in previous research using Lissajous feedback wherein performers required several days of practice to achieve similar levels of performance on a relatively simple (at least in comparison) 1:1 with 90° phase lag (e.g., Hurley and Lee 2006; Lee et al. 1995; Swinnen et al. 1998; Swinnen et al. 1997b) and 2:1 ratios (Swinnen et al. 1997a; Summers et al. 2002). For example, Swinnen et al. (1997b) had participants practice a 1:1 bimanual coordination pattern with a 90° phase offset for 3 days (50 trials per day) under various feedback conditions. In a Lissajous plot, a 1:1 movement pattern between two sinusoidal signals with a 90° phase offset would result in circular template. Swinnen, Lee et al. found enhanced performance during acquisition for a group provided Lissajous feedback relative to a group without Lissajous feedback. Performances on retention and transfer tests were also enhanced following acquisition with Lissajous feedback. Swinnen et al. (1997a) in another experiment asked participants to learn a 2:1 frequency ratio with the aid of Lissajous feedback. This experiment permitted participants 5 days of practice to learn this more difficult coordination pattern. Vision of the limb was permitted and metronomes were used to pace performance. However, the use of Lissajous feedback in these experiments did not produce the level of performance found in the present experiment and in recent experiments by Kovacs et al. (2009a, b) even though several days of practice were provided. As noted in an earlier section, we believe the failure to find large benefits from Lissajous feedback in these experiments was due to additional attentional demands related to the use of a metronome and attentional distractions produced by vision of the limbs. Note that the Cartesian coordinate system within which the limbs move is quite different from the coordinate system provided by the Lissajous plot. Allowing vision of the limbs and the Lissajous plot appears to create a situation in which participants experience difficulty resolving the two coordinate systems leading to increased attention demands and less effective use of the Lissajous information.
The difficulty in producing continuous bimanual polyrhythms has been attributed to the phase attraction of the 1:1 patterns of in-phase and anti-phase coordination wherein the required disparate frequencies are drawn to a common frequency (Walter et al. 1998; Boonstra et al. 2007; Sternad et al. 1999a, b). Extensive practice is thought to lead to the formation of a new attractor that emerges when a perceptual representation of the pattern is internalized in the form of a memory (Bogacz 2005; Zanone and Kelso 1992). The present findings demonstrate that the elimination of attentional distractions found in many experiments helps to create a performance environment that is conducive to overcoming intrinsic phase attraction. A key feature of this environment is that the performance feedback creates a perceptual representation that allows for the rapid tuning of the required polyrhythmic motor commands to the visual representation of that action.
The rapidity with which the current perceptually defined patterns were tuned indicates that the perception–action system’s capabilities are extensive. This notion is in stark contrast to earlier claims that the system’s intrinsic dynamics constrain certain patterns of limb motion and that 2:1 and higher order polyrhythmic coordination patterns are difficult, if not impossible, to effectively produce in continuous tasks. What future research needs to identify is how the current testing context afforded the perception–action system an opportunity to override intrinsic neuromuscular constraints that tend to pull the system toward more stable intrinsic coordination patterns.
The development of equations of motions in the form of nonlinear coupled oscillator models and potential function models to capture the formation of stable coordination patterns and transitions between stable coordination patterns has been a primary feature of the dynamic pattern approach (Kelso 1995; Kelso et al. 1986; Haken et al. 1985). Within these models, the coupling among the component oscillators was represented in abstract mathematical terms. Although specific links to neural pathways are not necessary to develop formal models of 1:1 and higher order frequency ratio performance, the bimanual literature is replete with attempts to reveal neural areas and cognitive-perceptual principles to support such functional coupling. An issue surrounding the nature of this functional coupling is whether motoric, perceptual, and cognitive constraints should be treated as independent and exclusive factors or as interacting factors supporting an integrated cycle of perception–action processes (Carson and Kelso 2004; Mechsner et al. 2001). For example, neural crosstalk has been used to explain stability differences between patterns, phase transitions, and difficulty in producing higher order rhythms based on interactions arising in the forward command streams of the highly interconnected organization of the nervous system (Swinnen 2002). Emphasis may also be placed on identifying neural areas supporting forward command streams (SMA, M1, cingulate motor cortex) and identifying different levels of interference (uncrossed corticofugal fibers, branched bilateral corticomotoroneuronal projections, etc.) that can occur across the many levels that forward command signals travel (Carson and Kelso 2004). Thus, one contribution to the coupling and stability characteristics of bimanual coordination resides in forward commands and the interactions that arise from those commands as the result of shared neural pathways (Ridderikhoff et al. 2005).
Cognitive processes, such as intention (Scholz and Kelso 1990), attention (Temprado and Swinnen 2005) and strategy selection (Kelso et al. 1990), can also influence the stability of bimanual and unimanual perception–action patterns. Recent theorizing has attempted to link the anterior cingulate cortex to cognitive constraints that impact the “functional representations” of muscles underlying perception–action processes in general (Carson and Kelso 2004). Other research has shown that bimanual coordination is also constrained by egocentric and allocentric reference frames, wherein practice results in abstract directional codes becoming part of the memory representation for movements and can constrain transfer more so than muscle pairs (Salesse et al. 2005a, b; Temprado and Swinnen 2005). Thus, cognitive and memory factors appear to interact with and override some of the motoric aspect of the coupling (forward command streams) that drives phase attraction toward in-phase and anti-phase coordination (Swinnen and Wenderoth 2004).
How does perceptual information contribute to the production and stabilization of bimanual coordination patterns? Research has shown a pivotal role for proprioception (Spencer et al. 2005; Baldissera et al. 1991; Mechsner et al. 2007; Ridderikhoff et al. 2007; Wilson et al. 2003) and tactile input (Buchanan and Ryu 2005; Aschersleben and Prinz 1995; Kelso et al. 2001) in stabilizing in-phase and anti-phase coordination in single limb and bimanual limb tasks. Bingham (2004a, b), Bingham et al. (1999), and Wilson et al. (2005a, b, 2009) have provided indirect evidence that the production of bimanual coordination patterns is limited by the performer’s ability to perceptually detect a given phase relationship between component oscillators. In other words, if a participant rates a perceptual representation of a bimanual pattern as uncoordinated and cannot estimate the variability in the pattern, then it is likely that effective production of the pattern will not be forthcoming. That is, Bingham (2004a, b), Bingham et al. (1999), and Wilson et al. (2005a, b) in a series of papers over the last 10 years have proposed that coupling in rhythmical bimanual tasks is perceptual with stability of the coordination pattern largely a function of the nature of the perceptual information and the participants sensitivity to that information. We have interpreted this to mean that one of the reasons for poor performance of many 1:1 patterns other than in-phase and anti-phase is that participants are unable to detect their errors and initiate corrections. The implication of this argument is that providing perceptual information that facilitates pattern detection will in turn lead to error detection (and correction) and allow stable performance to be rapidly and effectively tuned in. The work of Bingham and colleagues played a key role in establishing the link between visual perception and the stability of in-phase and anti-phase coordination, but did not directly test the role that such perceptual processes actually play or can play in the production of bimanual coordination patterns. Work by Mechsner et al. (2001), however, clearly demonstrated that a 4:3 polyrhythm, which was thought to be extremely difficult, could be performed satisfactorily when the available perceptual information was altered in a manner that permitted performance errors to be more effectively detected and corrected. In the task used by Mechsner et al. participants had no vision of their arms while turning cranks geared at different ratios for each arm, but were instructed to turn the cranks such that two flags driven by the cranks were either in an in-phase or anti-phase relationship. The Mechsner findings revealed that perceptual constraints based on in-phase and anti-phase coordination allowed the system to tune in quite rapidly a more difficult pattern without extensive training—to some extent similar to the finding from the work of Wilson et al. (2005a, b, 2009). Thus, an intrinsic constraint arising from the motor system facilitated performance when presented in a relevant perception–action framework.
The polyrhythms used in the present experiment have been considered to be difficult, if not impossible, to effectively produce using continuous movements of the limbs (Fraisse 1946; Kelso 1995; Summers et al. 2002). Indeed, pattern stability and complexity has been described using the Farey tree (Fraisse 1946) with higher levels in the tree indicating increased difficulty and Arnol’d tongues (see deGuzman and Kelso 1991; Kelso 1995; Kelso and deGuzman 1988; Peper et al. 1995a) where increasing levels of difficulty are associated with progressively narrower regions of structural stability. For example, 1:1 bimanual coordination patterns appear in Level 0 of the Farey tree while 2:1 and 3:2 polyrhythms fall at Level 1 and 2, respectively. The ratios (5:3 and 4:3) used in the present experiment fall in Level 3. While these notions of increasing complexity and decreasing stability have been consistent with much of the previous research on bimanual coordination, data from the present experiment and that of other recent experiments using a similar protocol (Kovacs et al. 2009a, b, c) provide a quite different picture (see Fig. 2g, h). When attentional demands are decreased through the absence of metronomes to pace the movements, the limbs are covered to avoid distractions, and Lissajous feedback (goal pattern and cursor representing the position of the limbs) is presented errors and variability in continuous relative phase do not increase in response to increased “difficulty”–“complexity.” Rather continuous relative phase errors and variability remain remarkably low with only the 1:1 in-phase coordination pattern resulting in lower errors and variability. Even more remarkable is the finding that these levels of performance are achieved with little or in the case of the 4:3 polyrhythm in the present experiment with no prior practice. The picture that is emerging from this research is that the difficulty characterized in the extant literature on bimanual coordination patterns arise to a large extent from perceptual and attentional factors and not from action components in the perception–action system. This conclusion seems warranted because minimizing attentional and perceptual distractions by eliminating pacing signals and vision of the limbs while providing Lissajous feedback results in unprecedented levels of bimanual coordination across a wide variety of coordination requirements.
It is important to note that salient perceptual information was provided via the Lissajous feedback and attentional distractions were decreased in the present experiment and in a series of recent experiments by Kovacs et al. (2009a, b, c), but other potential constraints (e.g., proprioceptive information and neural crosstalk) were not controlled. These facts coupled with the finding that proprioceptive feedback and neural crosstalk, for example, are thought to be complementary for 1:1 in-phase (goal relative phase 0°), but not for other phase relationships or multi-frequency coordination patterns (e.g., 2:1, 3:2, 4:3, and 5:3) provide a basis for evaluating the magnitude of these additional effects. Thus, cross-experiment comparisons of performance under various bimanual coordination conditions where much of the visual and attentional constraints are minimized with bimanual performance on a 1:1 in-phase coordination task permits a rough estimate of the cost incurred by the additional constraints on bimanual coordination to be made. In Fig. 2g, h, continuous relative phase errors and variability are plotted for the bimanual tasks used in the present experiment (5:3 and 4:3) and bimanual task used in recent experiments (Kovacs et al. 2009a, b, c) using similar protocols. What this comparison yields is the finding that 1:1 in-phase results in approximately 5°–6° continuous relative phase error and variability, while all other bimanual conditions tested resulted in roughly 10°–11° errors and variability. Thus, an initial estimate of the impact of the additional constraints is 5°–6°. While this estimate and cross-experiment comparisons in general should be viewed with caution, there appears to be a relatively constant source of error and variability in these experiments that cannot be accounted for on the basis of traditional thinking about the difficulty of bimanual coordination tasks. What this cross-experiment data does suggest is that the difficulty of bimanual coordination tasks should be viewed in terms of the perceptual information available and the participant’s sensitivity to it (Wilson et al. 2003) and not in terms of the phase lag or frequency ratios per se. If this statement is true higher levels in the Farey tree (Fraisse 1946) and decreased resonance regions in Arnol’d tongues result in part from perceptual (visual) information typically available and characterize difficulty under one set of perceptual information, but the difficulty of these tasks can be fundamentally altered by changing the visual–perceptual information available.
References
Aschersleben G, Prinz W (1995) Synchronizing actions with events: the role of sensory information. Percept Psychophys 57:305–317
Baldissera F, Cavallari P, Marini G, Tassone G (1991) Differential control of in-phase and anti-phase coupling of rhythmic movements of ipsilateral hand and foot. Exp Brain Res 83:375–380
Bingham GP (2004a) A perceptually driven dynamical model of bimanual rhythmic movement (and phase perception). Ecol Psychol 16:45–53
Bingham GP (2004b) Another timing variable composted of state variables: phase perception and phase driven oscillators. In: Hecht H, Savelsbergh GIP (eds) Advances in psychology: time to contact. Elsevier, Amsterdam
Bingham GP, Schmidt RC, Zaal FTJM (1999) Visual perception of relative phasing in human limb movements. Percept Psychophys 61:246–258
Bingham GP, Zaal FTJM, Shull JA, Collins D (2000) The effect of frequency on visual perception of relative phase and phase variability of two oscillating objects. Exp Brain Res 136:543–552
Bogacz S (2005) Understanding how speed affects performance of polyrhythms: transferring control as speed increases. J Mot Behav 37:21–34
Boonstra TW, Daffertshofer A, Breakspear M, Beek PJ (2007) Multivariate time-frequency analysis of electromagnetic brain activity during motor learning. Neuroimage 36:370–377
Buchanan JJ, Ryu YU (2005) The interaction of tactile information and movement amplitude in a multijoint bimanual circle-tracing task: phase transitions and loss of stability. Q J Exp Psychol 58A:769–787
Buchanan JJ, Ryu YU (2006) One to one and polyrhythmic temporal coordination in bimanual circle tracing. J Mot Behav 38:163–184
Carson RG, Kelso JAS (2004) Governing coordination: behavioural principles and neural correlates. Exp Brain Res 154:267–274
de Guzman GC, Kelso JAS (1991) Multifrequency behavioral patterns and the phase attractive circle map. Biol Cybern 64:485–495
Fraisse P (1946) Contribution a l’étude du rythme en tant que forme temporelle. J Psychol Norm Pathol 39:283–304
Guiard Y (1993) On Fitts’s and Hooke’s laws: simple harmonic movement in upper-limb cyclical aiming. Acta Psychol 82:139–159
Haken H, Kelso JAS, Bunz H (1985) A theoretical model of phase transitions in human hand movements. Biol Cybern 51:347–356
Hurley SR, Lee TD (2006) The influence of augmented feedback and prior learning on the acquisition of a new bimanual coordination pattern. Hum Move Sci 25:339–348
Kelso JAS (1984) Phase transitions and critical behavior in human bimanual coordination. Am J Phys Regul Integr Comp Physiol 15:1000–1004
Kelso JAS (1995) Dynamic patterns: the self-organization of brain and behavior. The MIT Press, Cambridge
Kelso JAS, de Guzman GC (1988) Order in time: how cooperation between the hands informs the design of the brain. In: Haken H (ed) Neural and synergetic computers. Springer, Berlin, pp 180–196
Kelso JAS, Scholz JP, Schöner G (1986) Nonequilibrium phase transitions in coordinated biological motion: critical fluctuations. Phys Lett A 118:279–284
Kelso JAS, DelColle JD, Schöner G (1990) Action-perception as a pattern formation process. In: Jeanarod M (ed) Attention and performance XIII. Erlbaum, Hillsdale, pp 139–170
Kelso JAS, Fink PW, DeLaplain CR, Carson RG (2001) Haptic information stabilizes and destabilizes coordination dynamics. Proc R Soc Lond B Biol Sci 268:1207–1213
Klapp ST, Nelson JM, Jagacinski RJ (1998) Can people tap concurrent bimanual rhythms independently. J Mot Behav 30:301–322
Kovacs AJ, Buchanan JJ, Shea CH (2009a) Bimanual 1:1 with 90° continuous phase: difficult or easy? Exp Brain Res 193:129–136
Kovacs AJ, Buchanan JJ, Shea CH (2009b) Perception–action coordination dynamics: using scanning trials to assess coordination tendencies. Neurosci Lett 455:162–167
Kovacs AJ, Buchanan JJ, Shea CH (2009c) Perceptual and attentional influences on continuous 2:1 and 3:2 multi-frequency bimanual coordination (submitted)
Kurtz S, Lee TD (2003) Part and whole perceptual-motor practice of a polyrhythm. Neurosci Lett 338:205–208
Lee TD, Swinnen SP, Verschueren S (1995) Relative phase alterations during bimanual skill acquisition. J Mot Behav 27:263–274
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73
Mechsner F, Stenneken P, Cole J, Aschersleben G, Prinz W (2007) Bimanual circling in deafferented patients: evidence for a role of visual forward models. J Neuropsychol 1:259–282
Peper CE, Beek PJ, van Wieringen PCW (1995a) Coupling strength in tapping a 2:3 polyrhythm. Hum Move Sci 14:217–245
Peper CE, Beek PJ, van Wieringen PCW (1995b) Multifrequency coordination in bimanual tapping: asymmetrical coupling and signs of supercriticality. J Exp Psychol Hum Percept Perform 21:1117–1138
Ridderikhoff A, Peper CE, Beek PJ (2005) Unraveling interlimb interactions underlying bimanual coordination. J Neurophysiol 94:3112–3125
Ridderikhoff A, Peper CE, Beek PJ (2007) Error correction in bimanual coordination benefits from bilateral muscle activity: evidence from kinesthetic tracking. Exp Brain Res 181:31–48
Salesse R, Oullier O, Temprado JJ (2005a) Plane of motion mediates the coalition of constraints in rhythmic bimanual coordination. J Mot Behav 37:454–464
Salesse R, Temprado JJ, Swinnen SP (2005b) Interaction of neuromuscular, spatial and visual constraints on hand-foot coordination dynamics. Hum Move Sci 24:66–80
Scholz JP, Kelso JAS (1990) Intentional switching between patterns of bimanual coordination depends on the intrinsic dynamics of the patterns. J Mot Behav 22:98–124
Schöner G, Haken H, Kelso JAS (1986) A stochastic theory of phase transitions in human hand movement. Biol Cybern 53:247–257
Spencer RMC, Ivry RB, Cattaert D, Semjen A (2005) Bimanual coordination during rhythmic movements in the absence of somatosensory feedback. J Neurophysiol 94:2901–2910
Sternad D, Turvey MT, Saltzman EL (1999a) Dynamics of 1:2 coordination: generalizing relative phase to n:m rhythms. J Mot Behav 31:207–223
Sternad D, Turvey MT, Saltzman EL (1999b) Dynamics of 1:2 coordination: sources of symmetry breaking. J Mot Behav 31:224–235
Summers JJ, Todd JA, Kim YH (1993) The influence of perceptual and motor factors on bimanual coordination in polyrhythmic tapping task. Psychol Res 55:107–125
Summers JJ, Davis AS, Byblow WD (2002) The acquisition of bimanual coordination is mediated by anisotropic coupling between the hands. Hum Move Sci 21:699–721
Summers JJ, Maeder S, Hiraga CY, Alexander JRM (2008) Coordination dynamics and attentional cost of continuous and discontinuous bimanual circle drawing movements. Hum Move Sci 27:823–837
Swinnen SP (2002) Intermanual coordination: from behavioral principles to neural-network interactions. Nature 3:350–361
Swinnen SP, Wenderoth N (2004) Two hands, one brain: cognitive neuroscience of bimanual skill. Trends Cogn Sci 8:18–25
Swinnen SP, Dounskaia N, Walter CB, Serrien DJ (1997a) Preferred and induced coordination modes during the acquisition of bimanual movements with a 2:1 frequency ratio. J Exp Psychol Hum Percept Perform 23:1087–1110
Swinnen SP, Lee TD, Verschueren S, Serrien DJ, Bogaerts DJ (1997b) Interlimb coordination: learning and transfer under different feedback conditions. Hum Move Sci 16:749–785
Swinnen SP, Verschueren MP, Bogaerts H, Dounskaia N, Lee TD, Stelmach GE, Serrien DJ (1998) Age related deficits in motor learning and differences in feedback processing during the production of a bimanual coordination pattern. Cogn Neuropsychol 15:439–466
Temprado JJ, Swinnen SP (2005) Dynamics of learning and transfer of muscular and spatial relative phase in bimanual coordination: evidence for abstract directional codes. Exp Brain Res 60:180–188
Treffner PJ, Turvey MT (1993) Resonance constraints on rhythmic movement. J Exp Psychol Hum Percept Perform 19:339–363
Walter CB, Corcos DM, Swinnen SP (1998) Component variability during bimanual rhythmic movements: not all harmonic timing ratios are alike. Res Q Exerc Sport 69:75–81
Wilson AD, Bingham GP, Craig JC (2003) Proprioceptive perception of phase variability. J Exp Psychol Hum Percept Perform 29:1179–1190
Wilson AD, Collins DR, Bingham GP (2005a) Perceptual coupling in rhythmic movement coordination: stable perception leads to stable action. Exp Brain Res 164:517–528
Wilson AD, Collins DR, Bingham GP (2005b) Human movement coordination implicates relative direction as the information for relative phase. Exp Brain Res 165:351–361
Wilson AD, Snapp-Childs W, Bingham GP (2009) Perceptual learning immediately yields new stable motor coordination. J Exp Psychol Hum Percept Perform (in press)
Zaal F, Bingham GP, Schmidt RC (2000) Visual perception of relative phase and phase variability. J Exp Psychol Hum Percept Perform 26:1209–1220
Zanone PG, Kelso JAS (1992) Evolution of behavioral attractors with learning—nonequilibrium phase-transitions. J Exp Psychol Hum Perform Percept 18:403–421
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kovacs, A.J., Buchanan, J.J. & Shea, C.H. Impossible is nothing: 5:3 and 4:3 multi-frequency bimanual coordination. Exp Brain Res 201, 249–259 (2010). https://doi.org/10.1007/s00221-009-2031-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-009-2031-y