
Abstract
The aim of the current study was to examine the influence of visual feedback on compensatory variations in force within and between trials. In Experiment 1, the task was to maintain a constant force of 5 N for 15 s using both index fingers. In Experiment 2, the task was to produce discrete force pulses such that the peak value of the sum of the two finger forces was 5 N. In both experiments, there were three conditions that manipulated the amount of visual feedback of the force trace. Results showed that the within-trial correlations between the finger forces increased when feedback was degraded, indicating that the two fingers were increasingly constrained toward acting as a single unit. Similarly, between-trial correlations showed that the amount of error compensation decreased when feedback was removed, indicating that participants produced a smaller set of goal equivalent solutions. It appears that feedback has a dual role in coordination—removing the constraints on the degrees of freedom within trials, and facilitating the utilization of redundancy between trials. The distinction between these two classes of variation is central to understanding the redundancy problem in motor control.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
One of the fundamental issues in developing a theory of motor control is Bernstein’s (1967) degrees of freedom (DOF) problem (Greene 1969; Turvey et al. 1978). Typically in most tasks the DOFs in the organism outnumber the DOFs required to complete the task. This implies that there is system degeneracy and that there exist multiple solutions for achieving the same goal. Bernstein (1967) proposed that the problem of motor coordination was the problem of learning to master these redundant DOFs.
The formation of synergies has been proposed as a solution for the DOF problem (Bernstein 1967; Gelfand and Tsetlin 1971; Turvey et al. 1978). A synergy can be considered as a unit that internally regulates a number of DOFs, but at the level of control, it is regarded as a single DOF (Turvey et al. 1978). This essentially eliminates the problem of trying to individually control each degree of freedom. If the number of DOFs can be expressed as ND − C, where N is the number of elements, D is the dimensionality and C is the number of constraints (Tuller et al. 1982), a synergy is analogous to an equation of constraint, effectively reducing the number of DOFs. Typically, statistical techniques of dimensionality reduction (like PCA) have been used to describe behaviors in terms of combinations of a small number of motor patterns (e.g. Alexandrov et al. 1998; d’Avella and Bizzi 2005; Haken 1996).
Error compensation in synergies: levels of analysis
Recently, it has been proposed that apart from reducing the number of DOFs that need to be controlled, another important characteristic of synergies is error compensation in order to stabilize certain performance variables (Gelfand and Latash 1998; Latash et al. 2002). The uncontrolled manifold (UCM) analysis has been used to identify such stabilization of certain performance variables (Scholz and Schöner 1999). The UCM analysis computes the variability in the dimension where performance is unaffected by changes in elemental variables (i.e. variables relating to the individual motor elements such as joint angles, individual finger forces or muscle EMGs) and the variability in the dimension where changes in the elemental variables affect performance (Latash et al. 2002). If the variability in the dimension where performance is unaffected is greater than the variability in the dimension where performance is affected, it is inferred that a synergy exists to stabilize that specific performance variable. In other words, the overall value of the performance variable is maintained in spite of changes in the values of the elemental variables. The UCM analysis has been primarily used to investigate the covariation of the elemental variables between trials at various instants in time so that the synergy can have a different strength at each instant of time during the trial.
An alternate method to quantify error compensation is to examine the relation between the DOFs over time in the same trial (Gottlieb et al. 1996; Morrison and Newell 1998). Bernstein (1967) emphasized this relation by indicating that one of the most important functions of the central nervous system in the control of motor acts is the process by which movements are corrected while they are in progress (p. 162). Arutyunyan et al. (1969) used a cross-correlation technique between the shoulder and the wrist motions of experienced shooters within a trial and found that horizontal movements in the wrist were compensated by opposite direction movements of the shoulder joint, effectively stabilizing the end point. Similarly, studies in speech production have also demonstrated that an externally induced perturbation in one motor element leads to compensatory changes in other elements so that the overall task is still achieved (Kelso et al. 1984).
The two levels of analyses, between- and within-trial, reveal different aspects of control (also see “Discussion”; Scholz et al. 2003). A within-trial analysis can be used to investigate if the DOFs are linked in some fashion such that any deviations during the trial in one are immediately compensated by changes in other DOFs. This compensation reflects a linkage or an equation of constraint that regulates the DOFs on a moment-to-moment basis (Tuller et al. 1982). On the other hand, a between-trial analysis indicates the ability of the system to produce multiple goal-equivalent solutions. This implies that on each trial, a different strategy may be used that is still able to achieve the same goal, and is a reflection of the ability to perform the task from different initial conditions.
Scholz et al. (2003) compared the two types of analyses in a multi-finger force production task by using the UCM analysis both within-trial and between-trials. They found that the within-trial UCM analyses and the between-trial UCM analyses yielded different values of the normalized variance difference (a measure of the strength of the synergy) at lower levels of forces, but at higher levels of force, the values were not significantly different. Though Scholz et al. acknowledged that within-trial and between-trial analyses examine different aspects of control they concluded that the within-trial analysis could be used in place of the between-trial analysis in cases where a large number of trials may be difficult to obtain. In our view, however, the between-trial and within-trial analyses represent different processes of stabilization in control.
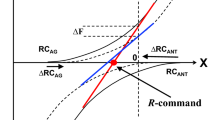
To illustrate the difference between these two levels of analysis, consider the following simulation of a task of trying to produce a constant force of 10 N for a period of 10 s with the left and right index fingers (Fig. 1). In the first trial, shown on the top panel in Fig. 1, the two finger forces—F1(t) and F2(t) are generated by having two white Gaussian noise processes each with a mean of 5 N and standard deviation 0.2 N. In the subsequent four trials, the means of the finger forces are changed such that means of F1(t) and F2(t), F1 and F2, are varied as (F1, F2) = (3, 7), (4, 6), (6, 4) and (7, 3). Now, it should be noted that even though the within-trial correlation between the two forces in each of these trials is close to zero (because the two white noise processes are uncorrelated), the between-trial correlation at any instant in time between the two fingers is close to −1. Therefore, at the within-trial level of analysis, the total force is not stabilized, but at the between-trial level, the total force is stabilized. One goal of this paper was to investigate the differences between these two levels of analysis in an isometric force production task.

Between and within-trial correlations for simulated data of five trials. The panels on the right show the within-trial correlation between the finger forces F1 and F2 for each trial. The panels on the bottom show the between-trial correlation at time t = 0, 2.5, 5, 7.5 and 10 s. The diagonal line on the correlation plots represents the manifold F1 + F2 = 10. Note that even though the within-trial correlations are close to zero (because the two white noise processes are uncorrelated), the between-trial correlations approach −1 because of using different goal equivalent solutions from trial to trial
Influence of feedback
Given that the idea of a synergy in the UCM perspective is based upon the pattern of the variability, i.e., comparing how the variance is distributed in task-relevant and task-irrelevant dimensions, a second issue examined here is how these variability patterns arise. The influence of sensory feedback has been examined as an important factor in the formation of these variability patterns. Todorov and Jordan (2002) proposed a principle of minimal intervention where the central nervous system uses feedback to correct deviations that interfere with the task goal, but allows variability in redundant dimensions.
However, Latash et al. (2005) described a central back coupling scheme where short latency negative feedback loops can mimic the action of a synergy without any need for sensory feedback. In this scheme, there are inhibitory connections between the elements so that an increase in activity of one element leads to a decrease in the others. This in effect leads to compensation between the elements without the need for sensory feedback. Similarly, Goodman and Latash (2005) proposed that compensation can be observed in a purely feedforward control scheme as long as the controller has information about the relationship between the change in the output to the changes in the individual elements (i.e. the Jacobian of the system).
In light of these proposals and questions about the role of feedback in the synergy formation, we ran two experiments to examine the influence of visual feedback on the interaction between the DOFs at two levels of analysis—within and between trials. The task in both experiments was isometric force production using two fingers with the goal of matching the sum of the two finger forces to a target force level. This task is redundant because there are numerous combinations of individual finger forces that could be used to achieve the same total force, and therefore it afforded the investigation of the correlation between the two fingers both at the within-trial and between-trial level of analysis. In order to test the generality of the hypothesis, two different categories of tasks (continuous, discrete) were used. In Experiment 1, a steady-state postural task that involved maintaining a constant force was selected. In Experiment 2, a discrete pulse-like force production task was examined where the short movement times implied that there was lesser time to utilize feedback.
Assuming feedback is necessary and sufficient for correcting deviations that interfere with the task goal, the presence of visual feedback should allow participants to demonstrate negative correlations (i.e. compensatory behavior) both within and between trials. When visual feedback is degraded, however, these negative correlations should become less negative or even turn positive. In the discrete force task of Experiment 2, it was anticipated that having to produce quick discrete pulses to the target force level would afford lesser time for feedback corrections and therefore yield different patterns of results than that seen in the continuous force task of Experiment 1.
Methods
Participants
Ten healthy volunteers (7 males, 3 females) with a mean age of 27 years (SD = 6 years) participated in the experiment. Participants gave informed consent and all procedures were approved by the Institutional Review Board at The Pennsylvania State University.
Apparatus
The forces produced by the fingers were recorded by two unidirectional load cells (Entran Devices Inc.) that were attached to the surface of a 2 cm high wooden board placed on a table. The load cells were placed 11 cm apart and sampled at a frequency of 140 Hz. The signals were amplified (Coulbourn Instruments, Model S72-25) and stored on a computer using a 16-bit A/D converter. Visual feedback was provided using a 14 in. (35.56 cm) computer monitor located about 70 cm in front of the participant. The target force level and the force trace that represented the sum of the two finger forces were displayed on the screen. The target level was centered on the screen and the gain of the force trace was set at 50 pixels/N.
Procedures
Participants were seated and were asked to place the left and right index fingers on separate load cells. To ensure that participants were producing force mostly using only their fingers, they were asked to rest their wrists on the table and keep the metacarpophalangeal and interphalangeal joints in slight flexion. They were also verbally instructed to produce force only using the fingers.
Experiment 1
In Experiment 1, the task was to produce force so that the sum of the two finger forces was maintained at a constant force of 5 N. Each trial lasted for a duration of 15 s. There were a total of three different conditions of constant force production. In all three conditions, the 5 N target force was indicated by a red horizontal line on the computer monitor. The three conditions—full-vision, intermittent-vision and no-vision, differed with respect to the online visual feedback of the force trace during the trial. In the full-vision condition, the participants were shown the force trace every 7 ms. Points displayed at prior instants of time remained on the screen until the end of the trial. In the intermittent-vision condition, the participants were shown the force trace every 1 s. Finally, in the no-vision condition, the participants saw the force trace similar to the full-vision condition for the first 6 s of the trial. After the first 6 s of the trial, the force trace was turned off, but participants were still asked to maintain the same level of force (Sosnoff and Newell 2005; Vaillancourt and Russell 2002). Each condition consisted of a block of 30 trials. The relatively large number of trials was needed in order to obtain good estimates of between-trial correlations. The order of the three conditions was randomized across participants.
Data analysis
The raw data were low-pass filtered using a second-order double pass Butterworth filter with a cut-off frequency of 30 Hz. The first 6 s and the last 1 s of each trial were not considered for analysis in order to remove the force transients associated with the initial increase in force to get up to the required force level and any reduction of force at the end of the trial. The first five trials of each condition were also not considered for analysis to minimize possible learning or adaptation effects from the previous block.
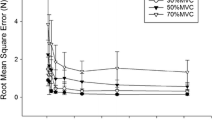
Performance. The extent to which participants matched the target force level successfully was quantified using a root mean square error (RMSE) score.
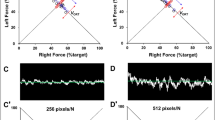
Within-trial correlation. The within-trial correlation between the finger forces was assessed using the cross-correlation coefficient computed at zero lag between the two finger force time series for each trial. Figure 2a shows representative data from one subject for the within-trial correlation in each feedback condition. The points (F1, F2) in this plot represent points at different instants of time within a single trial. The average within-trial cross-correlation for each subject was computed by taking the mean across all trials. Negative within-trial correlations would indicate some moment-to-moment compensation between the finger forces.

a Within-trial and b between-trial scatter plots in each of the three visual conditions for a subject in Experiment 1. The within-trial scatter plots were from a single trial and the between-trial scatter plots were generated at the 50% time instant
Between-trial correlation. The 8 s of data from each trial was split into 1% increments from 0 to 100%. At each instant, the between-trial correlation was computed between the finger forces for the 25 trials for each subject. Figure 2b shows representative data from one subject for the between-trial correlations in each feedback condition. The points (F1, F2) in this plot represent points at the same instant of time for different trials. For example, the forces produced by each finger F1 and F2 at the 50% instant in each of the 25 trials is considered, and a correlation between F1 and F2 would be computed using these 25 data points. The average between-trial correlation for each subject was then computed by taking the mean across all time instants. Negative between-trial correlations would indicate a tendency toward utilizing different solutions from trial to trial.
UCM analysis. The variance along and orthogonal to the uncontrolled manifold was computed both within and between trials. Each point in the F1 versus F2 plot was projected on to the UCM (i.e. the line F1 + F2 = 5 N) by taking the dot product. Variability along this dimension, does not affect performance as the total force adds up to 5 N. Each point was also projected on to the line orthogonal to the UCM (i.e. the line F1 = F2). Along this dimension, any variability leads to a change in the total force. The variances of these projections in each of these dimensions were termed VUCM and VORT, respectively. Similar to the correlations, for each subject the VUCM and VORT were averaged across trials or across time instants depending on whether it was a within-trial or between-trial analysis. If VUCM was greater than VORT in the within-trial analysis, it can be inferred that some compensation was present. Similarly, if VUCM was greater than VORT in the between-trial analysis, it indicated that there was a tendency toward using different solutions from trial to trial.
Statistical analysis
All dependent variables were analyzed using a 1-way repeated measures ANOVA with three levels of feedback condition (full-vision, intermittent-vision and no-vision). Post hoc multiple comparisons were corrected using the Bonferroni–Sidak correction. Z transformation of all correlation coefficients was performed for averaging across subjects and also in the ANOVAs to satisfy the normality assumption. The UCM analysis was analyzed using a 2 × 3 × 2 repeated measures ANOVA (analysis level × feedback condition × variance direction). The two analysis levels were within-trial and between-trial and the two variance directions were along the UCM and orthogonal to the UCM. The significance level was set at 0.05 for all tests.
Results
Performance. There was a significant main effect of feedback condition in the analysis of the RMSE [F(1.07, 9.63) = 20.29, P < 0.001]. Post hoc comparisons showed that the RMSE in the full-vision condition was the lowest, followed by the intermittent-vision and the no-vision conditions.
Within-trial correlation. The analysis of the within-trial correlation showed a significant main effect of feedback condition [F(2, 18) = 8.46, P < 0.001]. Post hoc comparisons showed that the correlations in the full-vision condition were significantly lower than the intermittent and no-vision conditions (Ps < 0.05). The intermittent and no-vision conditions were not different from each other (Fig. 3).

Mean within-trial and between-trial correlations in constant force production as a function of visual conditions. Negative correlations indicate error compensation
Between-trial correlation. The analysis of the between-trial correlation showed a significant main effect of feedback condition [F(2, 18) = 15.91, P < 0.001]. Post hoc comparisons showed that correlations in the full-vision condition were significantly more negative than the no-vision condition (P < 0.05). The intermittent and no-vision conditions were not different from each other (Fig. 3).
UCM analysis. The UCM analysis showed a significant main effect of feedback condition [F(2, 18) = 8.46, P = 0.003], and analysis level, [F(1, 9) = 59.76, P < 0.001]. These effects were mediated by a significant feedback condition × variance direction [F(2, 18) = 13.05, P < 0.001] and a significant analysis level × variance direction [F(1, 9) = 23.24, P = 0.001] (Fig. 4). At the within-trial level of analysis, VORT was greater than VUCM for the intermittent-vision and no-vision conditions. At the between-trial level of analysis, VUCM was greater than VORT in the full-vision and the intermittent-vision conditions (Ps < 0.05). Also, post hoc analyses showed that VORT was greater than VUCM at the within-trial level. However at the between-trial level, VUCM was greater than VORT. In summary, for the within-trial analysis, when feedback was intermittent or removed, the variance was distributed mostly along the direction orthogonal to the UCM. For the between-trial analysis, when the feedback was present or intermittent, the variance was distributed mostly along the UCM direction, indicating the utilization of multiple solutions.

Mean variances along the uncontrolled manifold (VUCM) and orthogonal to the manifold (VORT) within and between trials in the constant force task of Experiment 1
Experiment 2
Methods
The apparatus and the procedures were the same as in “Experiment 1”. In the pulse production conditions, subjects were asked to produce a series of discrete force pulses such that the peak of each pulse, which was the sum of the two finger forces, coincided with the 5 N target line. Each trial lasted for a duration of 60 s. In order to improve the time resolution of the force trace on the display, the 60 s trial was split so that subjects viewed only 6 s of data on the computer screen. After the force trace reached the end of the screen, the screen was erased and a new screen that displayed the force trace for the next 6 s would be presented. In each time window, subjects were instructed to produce three pulses leading to an average rate of one pulse every 2 s.
Similar to the constant force production task, the three conditions in the pulse production conditions differed with respect to the visual feedback of the force trace—full-vision, peak-only, and no-peak. In the full-vision condition, the subjects received visual feedback of the force for every 7 ms throughout the trial. In the peak-only condition, the force trace was extinguished when the force level crossed 1 N (Goodman and Latash 2005). After the end of the pulse, when the force level dropped back to <1 N, a cursor displayed the peak level of force attained in that pulse. Finally, in the no-peak condition, subjects began the trial identical to the peak-only condition, but after 30 s into the trial, the peak information of the pulses was no longer displayed. Each condition had a total of five trials for each subject.
Data analysis
To minimize learning effects, only the last three trials of each condition were considered for analysis. In order to compare the effects of feedback, only the pulses produced in the last 30 s of each trial was considered for analysis.
To analyze the compensation between the two fingers in this case, each of the pulses was detrended. Without detrending, the correlations between the finger forces would be high due to the fact that the task itself requires an increase in both finger forces simultaneously. However, the issue of interest here was error compensation, i.e. whether any deviations from the average profile in one finger were compensated by the other finger. Each pulse was extracted from the trial by defining the start of the pulse as the time when the rate of the total force crossed a threshold of 3.5 N/s and the end of the pulse as the time of peak total force. The force produced by each finger in each pulse was then individually detrended. First, for each finger, the ratio of the force produced by that finger F i (t) to the total force F(t) was calculated as R i (t) = F i (t)/F(t). The subscript i refers to finger 1 or 2 denoting the left or right index finger. The median value of this ratio was calculated (MR i ). Second, the average profile, AF(t), of the total force across all pulses in the trial was calculated. The detrended force profile, Fd i (t), for each finger was calculated by subtracting the individual force profile from the median ratio times the average total force, i.e. Fd i (t) = F i (t) − MR i × AF(t).
Performance. The extent to which participants matched the target force level was quantified using an absolute error score.
Within-trial correlation. After detrending, the within-trial correlation between the finger forces was assessed using the cross-correlation coefficient computed at zero lag between the two finger force time series. The average within-trial correlation was computed for each subject by taking the mean across all trials.
Between-trial correlation. Because the task was to match the peak force with the target level, the correlation between the actual finger forces across all the pulses only at the instant of peak force was computed.
UCM analysis. The variance along and orthogonal to the uncontrolled manifold was computed both within and between trials similar to Experiment 1. Similar to the correlation analysis, the detrended forces were used in the within-trial analysis and the between-trial UCM analysis was computed on the actual forces at the instant of peak force.
Results
Performance. The analysis of the absolute error showed a significant main effect of feedback condition [F(2, 18) = 26.94, P < 0.001]. Post hoc comparisons showed that the absolute error in the full-vision condition was lower than the peak-only condition, which in turn was lower than the no-peak condition (Ps < 0.05).
Within-trial correlation. The analysis of the within-trial correlation showed that there was no significant main effect of feedback condition (P > 0.05). The mean within-trial correlation was 0.54 in the full-vision condition, 0.46 in the peak-only condition, and 0.45 in the no-peak condition (see Fig. 5).

Mean within-trial and between-trial correlations in the pulse force production as a function of visual conditions. Negative correlations indicate error compensation
Between-trial correlation. The analysis of the between-trial correlation showed a significant main effect of feedback condition [F(2, 18) = 6.79, P = 0.006]. Post hoc comparisons showed that correlations in the no-peak condition were significantly higher than the full-vision condition (Ps < 0.05). None of the other comparisons were significant (P > 0.05) (see Fig. 5).
UCM analysis. The analysis of the variances showed a significant main effect of feedback condition [F(2, 18) = 7.98, P = 0.003], analysis level [F(1, 9) = 10.63, P = 0.01], and variance direction [F(1, 9) = 10.17, P = 0.011]. The analysis level × feedback condition interaction and the analysis level × feedback condition × variance direction interaction were also significant. Post hoc comparisons showed that at the within-trial level, VUCM was smaller than VORT in the full-vision condition. At the between-trial level, VUCM was smaller than VORT in the peak-only and no-peak conditions (see Fig. 6). In summary, for the within-trial analysis, none of the feedback conditions showed error compensation, with the variance orthogonal to the UCM even being slightly higher than the variance along the UCM for the full-vision condition. For the between-trial analysis, when online feedback was removed, the variance was primarily oriented along the direction orthogonal to the UCM.

Mean variances along the uncontrolled manifold (VUCM) and orthogonal to the manifold (VORT) within and between trials in the discrete pulse task of Experiment 1
Discussion
The purpose of the current study was to investigate the coordination between the DOFs at two levels of analysis—within and between trials, and the effect of feedback in influencing the relation between the DOFs at these levels.
At the within-trial level of analysis, the influence of feedback on the correlation was pronounced in the continuous force production task of Experiment 1. There was little or no error compensation within trial in the presence of visual feedback, indicating that the two fingers were operating independently. However, when feedback was intermittent or removed, the correlation between the finger forces became positive, suggesting that the fingers were coupled together. The UCM analysis also supported this result, with the increase in correlation being primarily due to an increase in VORT. This effect, however, was not observed in the discrete force production task of Experiment 2 where the manipulation of feedback did not have a significant effect on the correlations between the fingers. This was probably be due to the nature of the discrete production task, which required comparatively short duration responses, leaving little time for feedback to influence the correlations during the execution of the task (Schmidt 1976).
It is interesting to note in Experiment 1 that though feedback reduced the amount of positive correlation, error compensation (i.e. negative correlation) was not observed in the within-trial analysis. The absence of negative within-trial correlation could possibly be related to the presence of an error deadzone (Wolpert et al. 1992)—an area around the target where no corrections are initiated. Therefore, if the force trace had stayed within this dead zone, there might be no compensatory action between the two fingers even though feedback is present. Relatedly, if participants reduce the force variability of the fingers to a minimum, trying to correct for the errors arising from this inherent variability may introduce overcorrections and instability (Vaillancourt et al. 2006; Wickens 1984). As a result, once the target force level has been reached, maintaining the same force level for each finger and not correcting for the inherent variability of each finger (which results in low within-trial correlation) may be a strategy adopted to improve overall task performance.
At the between-trial level of analysis, the effects of feedback on the correlations were more pronounced. In Experiment 1, the presence of online visual feedback resulted in significantly stronger negative correlation, indicating that participants were able to select multiple solutions that were goal-equivalent. However, when visual feedback was removed or degraded, the correlation became less negative and sometimes even positive indicating that the stabilization of performance variables was no longer present. Again, the UCM analysis showed that this increase in correlation was due to an increase in VORT. This effect of feedback on the between-trial correlation was also found in the discrete force production task of Experiment 2, with the full-vision condition showing more negative correlation than the peak-only and the no-peak conditions.
In Experiment 1, negative between-trial correlations seen occasionally in the absence of feedback have to be interpreted with caution. Because the participants in the no-vision condition initially had full-vision of the force trace to allow them to get up to the target force level, this feedback had an influence in allowing the participants to use different solutions to get up to the target force level. Therefore, the correlations in this condition were highly negative at the instant the force trace was removed and gradually became more positive until the end of the trial, resulting in the average correlations being negative sometimes. In Experiment 2, however, the force trace was not visible in the peak-only and the no-peak conditions and there were no negative between-trial correlations in these conditions. These results together indicate that in the current set of experiments, the critical factor influencing the utilization of different coordination solutions from trial to trial is the vision of the force trace during the initial increase in force up to the target force level.
Although the findings do not prove that feedback is necessary for negative correlations to occur, both experiments show that for participants with limited practice, removing feedback had an effect on the correlations both within and between trials. This suggests a dual role for feedback—it decreases the correlation between the DOFs, making them more independent within a trial, and it facilitates the utilization of redundant solutions from trial to trial. The independence of DOFs in the presence of feedback has been shown in bimanual coordination, where visual feedback can facilitate tracking different frequency ratios (Mechsner et al. 2001), and more recently, with haptic feedback where the two hands can track different shapes (Rosenbaum et al. 2006). On the other hand, the utilization of redundancy in the presence of feedback is consistent with the optimal feedback control hypothesis (Todorov and Jordan 2002), suggesting that the controller may not care about deviations in task dimensions that do not interfere with the task goal.
The results also point out that error compensation at one level is not related to error compensation at the other. Therefore, what may be considered a “synergy” at one level of analysis may not be reflected at another level. In particular, it seems that the “within-trial synergy”, requiring instantaneous error-correction is more difficult to achieve, even in the presence of online feedback. Such near-instantaneous error correction has been observed in experts with extensive practice (e.g. Arutyunyan et al. 1969) and in extremely common tasks like speech production (e.g. Kelso et al. 1984). This error-correction in time requires grouping DOFs into task-specific functional units (“coordinative structures”, Turvey et al. 1978). On the other hand, as seen in the present study, the “between-trial synergy” is observed in the presence of online feedback with very little practice. This error-correction between trials does not necessarily require grouping of DOFs into units, but rather only requires a utilization of different solutions from trial to trial.
The two levels of analysis closely parallel the two types of errors in motor programs outlined by Schmidt (1976) as selection and execution errors and maybe under the control of different mechanisms. The between-trial level relates to the selection (or planning) level, and is presumably under the control of higher cognitive levels. If one assumes that a single trial involves a single motor plan, then the analysis between trials would reveal variability and possibly error-compensation at the planning level. On the other hand, the within-trial level relates to the execution level, i.e. how the variability of the DOFs is related over time during the execution of a single trial. The short latencies of correction required indicate that any error compensation at this level probably involves more low-level control (Schmidt 1976).
Finally, the distinction emphasized here between the within-trial and between-trial levels of analyses has relevance to testing Bernstein’s (1967) freezing–freeing hypothesis of motor learning. Bernstein (1967) suggested a 3-stage hypothesis of motor learning where superfluous DOFs are eliminated or frozen early in practice, but with learning, more DOFs are incorporated into the movement to exploit the reactive forces. In early tests of this hypothesis, the analysis was done within trials by using measures such as standard deviation of joint angles, and cross-correlations across joints, to index the amount of freezing (e.g. McDonald et al. 1989; Vereijken et al. 1992). However, more recently, the UCM analysis has been applied to analyze the compensation between trials to suggest that there was no freezing, but just a reorganization of DOFs (Yang and Scholz 2005).
We propose that the two levels of analyses (within- and between-trial) are complementary and address two different aspects of the redundancy problem. The analysis within trials is directed to the freezing–freeing hypothesis and reflects how the many DOFs are constrained during task performance of every single trial. On the other hand, the analysis between trials is related to Bernstein’s (1967) idea of “repetition without repetition”—the act of being able to achieve the task goal from trial to trial without repeating the same movement pattern. The between-trial analysis addresses the issue of how certain outcome variables may have lower variability from trial to trial, even though the individual DOFs that contribute to the outcome have higher variability. It is possible for both freezing and utilization of redundancy to co-exist. For example in a kinematically redundant task, a joint may be frozen (i.e. show little or no motion) within a single trial in order to reduce the redundancy at the level of the trial. However, a change in initial conditions from trial to trial may result in the joint being frozen at slightly different joint angles between trials, resulting in the utilization of redundancy. At both levels, feedback plays an important role in movement coordination—facilitating the independence of DOFs and the exploration of redundant solutions.
References
Alexandrov A, Frolov A, Massion J (1998) Axial synergies during human upper trunk bending. Exp Brain Res 118:210–220
Arutyunyan GA, Gurfinkel VS, Mirskii ML (1969) Organization of movements on execution by man of an exact postural task. Biophysics 14:1162–1167
Bernstein NA (1967) The co-ordination and regulation of movements. Pergamon, Oxford
d’Avella A, Bizzi E (2005) Shared and specific muscle synergies in natural motor behaviors. Proc Natl Acad Sci USA 102:3076–3081
Gelfand IM, Latash ML (1998) On the problem of adequate language in motor control. Motor Control 2:306–313
Gelfand IM, Tsetlin ML (1971) Mathematical modeling of mechanisms of the central nervous system. In: Gelfand IM, Gurfinkel VS, Fomin SV, Tsetlin ML (eds) Models of the structural functional organization of certain biological systems. MIT Press, Cambridge, pp 1–22
Goodman SR, Latash ML (2005) Feed-forward control of a redundant motor system. Biol Cybern 95:271–280
Gottlieb GL, Song Q, Hong DA, Corcos DM (1996) Coordinating movement at two joints: a principle of linear covariance. J Neurophysiol 75:1760–1764
Greene PH (1969) Seeking mathematical models for skilled actions. In: Bootzin D, Muffley HC (eds) Biomechanics (proceedings of the First Rock Island Arsenal biomechanics symposium). Plenum, New York
Haken H (1996) Principles of brain functioning. Springer, New York
Kelso JAS, Tuller B, Bateson EV, Fowler CA (1984) Functionally specific articulatory cooperation following jaw perturbations during speech: evidence for coordinative structures. J Exp Psychol Hum 10:812–832
Latash ML, Scholz JP, Schöner G (2002) Motor control strategies revealed in the structure of motor variability. Exerc Sport Sci Rev 20:26–31
Latash ML, Shim JK, Smilga AV, Zatsiorsky V (2005) A central back-coupling hypothesis on the organization of motor synergies: a physical metaphor and a neural model. Biol Cybern 92:186–191
McDonald PV, van Emmerik REA, Newell KM (1989) The effects of practice on limb kinematics in a throwing task. J Mot Behav 21:245–264
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73
Morrison SM, Newell KM (1998) Interlimb coupling as a function of isometric force output. J Mot Behav 30:323–342
Rosenbaum DA, Dawson AM, Challis JH (2006) Haptic tracking permits bimanual independence. J Exp Psychol Hum 32:1266–1275
Schmidt RA (1976) The schema as a solution to some persistent problems in motor learning theory. In: Stelmach G (ed) Motor control: issues and trends. Academic Press, NY, pp 41–66
Scholz JP, Schöner G (1999) The uncontrolled manifold concept: identifying control variables for a functional task. Exp Brain Res 126:289–306
Scholz JP, Kang N, Patterson D, Latash ML (2003) Uncontrolled manifold analysis of single trials during multi-finger force production by persons with and without Down syndrome. Exp Brain Res 153:45–58
Sosnoff J, Newell KM (2005) Intermittent visual information and the multiple time scales of visual motor control of continuous isometric force production. Percept Psychophys 67:335–334
Todorov E, Jordan MI (2002) Optimal feedback control as a theory of motor coordination. Nat Neurosci 5:1226–1235
Tuller B, Turvey MT, Fitch HL (1982) The Bernstein perspective II: the concept of muscle linkage or coordinative structure. In: Kelso JAS (ed) Human motor behavior: an introduction. Erlbaum, NJ, pp 253–270
Turvey MT, Shaw RE, Mace W (1978) Issues in a theory of action: degrees of freedom, coordinative structures, and coalitions. In: Requin J (ed) Attention and performance VII. Erlbaum, NJ, pp 557–598
Vaillancourt DE, Russell DM (2002) Temporal capacity of short-term visuomotor memory in continuous force production. Exp Brain Res 145:275–285
Vaillancourt DE, Haibach PS, Newell KM (2006) Visual angle is the critical variable mediating gain-related effects in manual control. Exp Brain Res 173:742–750
Vereijken B, van Emmerik REA, Whiting HTA, Newell KM (1992) Free(z)ing degrees of freedom in skill acquisition. J Mot Behav 24:133–142
Wickens CD (1984) Engineering psychology and human performance. Merrill, Columbus
Wolpert DM, Miall RC, Winter JL, Stein F (1992) Evidence for an error deadzone in compensatory tracking. J Mot Behav 24:299–308
Yang JF, Scholz JP (2005) Learning a throwing task is associated with differential changes in the use of motor abundance. Exp Brain Res 163:137–158
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ranganathan, R., Newell, K.M. Motor synergies: feedback and error compensation within and between trials. Exp Brain Res 186, 561–570 (2008). https://doi.org/10.1007/s00221-007-1259-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-007-1259-7