
Abstract
Recently, the framework of the uncontrolled manifold (UCM) hypothesis has been used to study multi-finger synergies based on analysis of motor variability across large sets of trials. We introduce a similar method of analysis, which can be applied to single trials, and hence may be more relevant to studies of atypical populations. In one experiment, results of across-trials and single-trial UCM analysis were compared for control participants who performed accurate ramp force production trials by pressing with four fingers of the hand. Both types of analysis revealed selective stabilization of total force by co-variations of individual finger forces. The stabilization was more pronounced at higher forces. When the participants purposefully varied the relative involvement of fingers during the ramp, significantly higher UCM effects were observed. However, high-pass filtering of the data at 4 Hz made these results similar to those observed in trials with natural patterns of force production. These observations allow assessment of the contribution of processes at two levels of a hypothetical hierarchical control system to the stabilization of total force. We also applied the single-trial UCM method to re-analyze previously published data from another experiment to study the motor variability in a group of persons with Down syndrome (DS) because these persons have difficulty in motor planning and timing as well as in force stabilization. Results of single-trial UCM analysis demonstrated force stabilization in these persons. The degree of force stabilization improved significantly after three days of practice. The analysis also showed that the total pronation/supination moment generated by the four fingers with respect to the midpoint was stabilized. The degree of moment stabilization did not change with practice. We conclude that the single-trial method of UCM analysis allows the analysis of hypotheses about stabilization of different performance variables by alleged multi-finger synergies in both typical individuals and individuals with DS.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Natural human movements are characterized by involvement of more motor elements than are strictly necessary to perform typical motor tasks, e.g., multiple muscles crossing a joint, multiple joints within an extremity, or multiple extremities. Such systems have traditionally been viewed as redundant and posing computational problems for the central nervous system (CNS) (Bernstein 1967; Turvey 1990). Alternatively, they may be viewed as abundant and useful for the CNS to ensure stable performance of a motor task (Gelfand and Tsetlin 1966; Gelfand and Latash 1998). Consistent with the latter view, the Uncontrolled Manifold (UCM) hypothesis suggests that the control of important performance variables during repetitions of a task is accomplished by taking advantage of the available motor abundance rather than opting for a unique solution to the coordination problem (Schöner 1995; Scholz and Schöner 1999; Scholz et al. 2000). According to the UCM hypothesis, interactions among the outputs of the motor elements are organized such that their variance is largely restricted to a subspace (a UCM) in the state space of those elements that corresponds to the desired value of a particular performance variable. In other words, effects of fluctuations of the output of one or a few elements on a common functional variable are (partly) corrected by selective changes (i.e., those that keep stable the desired value of the performance variable) in the activity of other elements (error correction, Latash et al. 2001). Recent simulations of an optimal feedback control model are in agreement with the UCM hypothesis (Todorov and Jordan 2002).
A method of analyzing the variance across many repetitions of a particular motor task has been developed and applied successfully to a variety of motor tasks including multi-finger force production (Latash et al. 2001, 2002b; Scholz et al. 2000, 2001, 2002). One difficulty with the UCM method as applied to date, however, is that it requires relatively large sets of trials within which the participants are assumed not to change their control strategy. Persons without motor deficits may meet these requirements, but it is a limiting factor when applying the method to analyze changes in motor coordination in individuals with movement disorders. Thus, a major objective of the current study was to introduce a method that can be used to perform the UCM-analysis using only a few trials or even a single trial and to compare results of this method to those obtained with a more traditional multi-trial UCM analysis.
We would like to consider at least two hypothetical neural levels of synergy formation. These two levels are consistent with the theoretical work of Schöner (1995) as well as the earlier writings of Bernstein (1967; see also Saltzman and Kelso 1987). The upper level is analogous to the level of motor planning suggested by Schöner (1995) at which particular movement parameters are specified, for example, for multi-finger force production tasks, the time profile of total force and the sharing pattern among the fingers. At the lower level, the level of timing in Schöner's scheme, commands to individual elements are specified leading, for the same example, to force profiles of individual fingers. Both levels contribute to actually observed motor patterns and can lead to changes in the characteristics of motor variability. Within this scheme, we would like to address the following three questions: (1) What are the contributions of processes at each of the two control levels to apparent differences between the two components of motor variance, parallel and orthogonal to the UCM? (2) What are the differences between aspects of motor coordination addressed in the across-trials and single-trial UCM analyses? and (3) Can single-trial UCM analysis be used to address atypical motor coordination and its possible changes with practice?
To address the third question, we applied the single-trial UCM analysis to multi-finger force production trials by individuals with Down syndrome (DS). Persons with DS typically exhibit high variability in motor task performance (reviewed in Latash et al. 2001). Moreover, such persons are unlikely to perform numerous trials at a task without a loss of concentration (e.g., Green et al. 1989), possibly changing their control strategy (Latash et al. 1993). Hence, studies of motor coordination in this group could potentially benefit from a UCM analysis procedure that requires only one or a few trials. Persons with DS show deficits in motor planning (Welsh and Elliott 2000) and timing (Chiarenza 1993; Spano et al. 1999; Ringenbach et al. 2002). Hence, they may be expected to show differences in the processes at both control levels described earlier.
Relatively few studies measured impairments of movement coordination in persons with DS (Aruin et al. 1996; Almeida et al. 2001; Robertson et al. 2002; Ringenbach et al. 2002). In a recent study of multi-finger force production tasks (Latash et al. 2002a) persons with DS were required to generate accurate ramp profiles of the total force produced by the four fingers of their dominant hand pressing in parallel on separate force transducers. To analyze how the fingers interacted with each other, the variance of the total force (Var-FTOT) was computed across several trials and compared to the sum of the variances (∑Var-Fi) of the individual finger forces. Note that for non-correlated random variables, the sum of the variances should be equal to the variance of the sum (the Bienaime equality). In persons without DS, Var-FTOT was typically smaller than ∑Var-Fi indicating predominantly negative covariations among the finger forces, interpreted as error compensation with respect to total force control. In contrast, for individuals with DS, Var-FTOT was higher than ∑Var-Fi indicating predominantly positive covariations among the finger forces destabilizing the total force profile. After three days of practicing the force production tasks by DS participants, the relation between Var-FTOT and ∑Var-Fi became closer to that observed in typically developing persons. Thus, with practice, individuals with DS seemed to begin to take advantage of the possibility of error compensation among the fingers.
To test the conclusions reached in Latash et al. (2002a) and to illustrate the potential of the new method of analysis, we applied the single-trial-UCM method to single ramp trials performed by persons with and without DS. The method was used to analyze possible selective stabilization of both total force (explicitly required by the instruction) and total moment with respect to the functional longitudinal axis of the forearm/hand (cf. Li et al. 1998). We will refer to hypotheses on stabilization of the total force and total moment as force-control and moment-control hypotheses, respectively (Latash et al. 2001; Scholz et al. 2002). Performance of the DS group was analyzed prior to and after 3 days of practice. The findings not only confirm that the method can be used to analyze the structure of variability within multi-element systems but also allow an additional insight into possible sources of apparent error compensation in multi-element synergies.
Materials and methods
Participants
Experiment I
Seven healthy volunteers, aged between 24 and 30, were recruited from graduate students at the Pennsylvania State University to participate in this experiment. These included four females and three males. All participants in this study were right handed with respect to their hand usage during writing and eating and without neurological or musculoskeletal impairments affecting the upper extremity.
Experiment II
Sixteen persons with Down syndrome (trisomy-21) (DS group) and 16 age-and gender-matched typical participants (CS group) took part in the original study reported by Latash et al (2002). Because several of the participants with DS performed force ramps that were grossly inconsistent across trials, i.e., failing to follow the prescribed force ramp or having extremely variable ramp times across trials, data for only 11 individuals with DS who had the most consistent performance and their matched controls were chosen for the analyses reported in this article.
Participants with DS were recruited with the help of the Mile High Down Syndrome Association in Denver, while the control participants were recruited in State College, PA. Hand dominance was determined by asking each participant a question: "Which hand do you use to hold the spoon when you eat soup?" and then asking them to sign their name. All participants used the same hand in answer to the first question and for the signature. We also confirmed with the parents of participants with DS that this was typical. The DS group consisted of six males and five females, which was mirrored by the CS group. The average age of the DS group was 19.7±1.5 years. For the CS group, the average age was 19.8±1.5 years.
The purpose of the experiments and the involved procedures were explained to all study participants and, in the case of the DS group, to their parents according to protocols approved by the Internal Review Board of the Eleanor Roosevelt Institute in Denver and the Office for Regulatory Compliance of the Pennsylvania State University, in compliance with the Helsinki Declaration. The participants in Experiment II (DS group and CS group) and their parents were compensated for their participation in the study.
Experimental setup
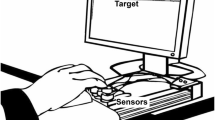
Four unidirectional piezoelectric force sensors (model 208AO3; Piezotronic Inc.), 1.5 cm in diameter, measured the forces exerted by the fingers of the participant's dominant hand. The sensors were mounted on aluminum posts, covered with cotton pads, and placed within an aluminum frame. The frame was placed into a groove in a wooden board, assuring a stable position of the sensors. To adjust for differences in arm length, the frame could be placed at different positions from the front end of the board. The frame with the sensors could also be displaced laterally within the board. To adjust for differences in hand size, frames of different widths were used, while the sensors could be moved back and forth within the frames to adjust for differences in finger length. A semi-spherical object, fitted to the size of the hand, was placed underneath the participant 's palm to provide support and assure a stable position of the hand with respect to the sensors.
During testing, the participant sat at the table in an adjustable height chair. The upper arm was at approximately 45° of abduction in the frontal plane and 45° of flexion in the sagittal plane, and the elbow was at approximately 45° of flexion. The forearm rested on the board containing the sensors. After a participant occupied a comfortable position, the forearm was strapped to the board with sets of Velcro straps.
In tasks requiring maximal force production, the participants could view traces corresponding to forces produced by each individual finger. In addition, they could view a trace corresponding to the total force produced by all the fingers they were instructed to use to produce the force. Each finger was identified with a particular color label attached to the sensor and the matching color of the trace on the screen. One of the lines was much thicker and brighter than the others; it corresponded to the force that the participants were required to maximize in a particular trial. Also, for Experiment II, a smiley face was shown in the left upper corner of the screen. Its mouth represented a parabolic function whose curvature increased with the force produced by the master fingers and decreased with the force produced by other, explicitly non-involved fingers (we will address those as slave fingers).
In ramp force production tasks the video screen showed traces corresponding to the total force produced by the four fingers and a ramp profile that the participants were required to match with that force trace. In Experiment II, a "thermometer" was also displayed that showed participants their score after each trial. Analog output signals from the sensors were connected to separate AC/DC signal conditioners (Model 484B06; Piezotronic) and fed into a laptop computer (Pentium 3). The data were collected at 1,000 Hz with a 12-bit resolution using National Instruments A/D board and LabView based data acquisition software. Force traces were shown on-line on the computer monitor, located approximately 50 cm in front of the participant.
Procedures
General
For the analyses presented in this report, all participants performed tests that included maximal force production (maximal voluntary contraction, MVC) with each finger of the dominant hand separately (MVCi, i = I—index, M—middle, R—ring and L—little), and with all four fingers acting together (MVCIMRL). A second task required the participant to slowly increase the total force of the four fingers (IMRL) to follow a ramp template shown on the computer screen.
Experiment I
The participants were asked to produce peak force within a 2 s time window shown on the screen and then to relax. They were instructed to pay no attention to possible force generation by other, "uninvolved" fingers as long as the explicitly involved finger(s) generated their peak force. Each participant performed two trials using each finger combination. The trial with the highest force produced by the explicitly involved fingers was kept as a reference to adjust the target forces in the two other tests.
Following the MVC task, a series of sub-maximal ramp trials were performed with each finger to generate linear estimates of the relations between changes in individual finger forces and change in the total force during a multi-finger task (finger-force Jacobians, cf. Scholz et al. 2002). These relations are non-trivial because of the phenomenon of enslaving (Li et al. 1998). As demonstrated in previous studies, patterns of finger enslaving show nearly linear relations between the forces produced by slave fingers and the force produced by the master finger within a large range of forces (Li et al. 1998; Zatsiorsky et al. 1998, 2000). Participants were asked to produce ramp patterns of force from 0 to 40% of MVC by pressing with only one finger in each separate trial. An oblique red line was shown on the screen, and the participant's task was to trace this line in time with the cursor representing the sum of forces of all four fingers. These ramp tasks were performed twice, and the average of the two trials was used to estimate the effect of enslaving for further analysis (see Scholz et al. 2002 for details).
Participants performed 25 trials each of two different four-finger ramp tasks. In the first task, participants followed the force ramp from zero to a value of 30% of their MVC using all four fingers as in previous experiments (Latash et al. 2002). To determine whether voluntary changes in force sharing would modify the UCM-effects, participants performed a second task in which they were asked to intentionally vary the contribution of the four fingers to the total force during the ramp while still producing a stable ramp trajectory (under instructions "start by pressing mostly with the index finger and end by pressing mostly with the little finger" or "start by pressing mostly with the little finger and end by pressing mostly with the index finger").
Experiment II
Prior to each MVC trial, the experimenter explained to the participant that pressing on the "buttons" with the "red finger" would make the "red line" go up, and the higher it goes the happier the smiley face would be. They were also told that pressing with "wrong fingers" would make the smiley face unhappy. A "good performance" and "bad performance" of the task was demonstrated to the participant by the experimenter. Prior to each test, the participants had at least three practice trials. We concluded that our participants with DS understood the tasks based on their performance during the practice trials and on their verbal feedback expressing satisfaction with good performance.
Each MVC trial started with a sound signal generated by the computer, the "get ready" signal. The experimenter also reminded the participant verbally to get ready. After a delay of 2 s, a trace started to move across the screen showing the participant the force(s). The participants had up to 10 s to reach maximal force with the master finger(s). They were asked not to pay attention to possible force generation by other (slave) fingers, as long as the master finger(s) produced maximal force. The participants were not allowed to lift fingers off the sensors at any time. Such trials made the smiley face "very unhappy"; they were identified during the experiment, discarded, and repeated. For each MVC task, two trials were performed, and the data for the trial with the highest force of the master finger(s) were used. The data from the individual finger MVC tasks were also used to estimate finger-force Jacobians (see description under Experiment I). These estimates are usually obtained using sub-maximal ramp tests (Latash et al. 2001, 2002; Scholz et al. 2002), as in Experiment I. However, because such tests were not originally performed in the DS group and CS group, the single-finger MVC tasks were used for this purpose. For estimates of the finger-force Jacobian, only the portion of each finger's force ramp up to 40% of their four-finger MVC was used to be consistent with Experiment I.
In the ramp tests involving four fingers, eight trials of relatively consistent trial length (9–10 s) were available for each task. More trials were not available because participants with DS showed higher errors in tasks that required accurate force production.
The screen showed the participant a thick red line. It was horizontal, corresponding to zero force for the first 5 s. Then, it became oblique going up to 30% of the participant's four-finger MVC over 3 s. Then, it stayed horizontal for two more seconds corresponding to a constant force level of 30% of the MVC. However, the participants were not required to keep the force constant after they reached the upper flat portion of the template, and these data were not analyzed. A "thermometer" was shown in the left upper corner of the screen. After each trial, it showed a score (between 40 and 100) computed using the root mean square (RMS) error for deviations of the actual force profile from the template ramp profile over the trial duration. The participants were told that only Michael Jordan was able to score 100 and encouraged to score as close to 100 as they could. Prior to the ramp tests, the experimenter showed the participants an example of poor performance (score of about 50) and an example of good performance (score of about 95). Each participant had exactly three practice trials prior to starting the data acquisition.
Participants in the CS group were tested once. Individuals with DS were tested five times on consecutive days. The first test (Pre-Test) and the last test (Post-Test) were identical, corresponding to the described protocol (about 30–40 min per participant). Tests 2, 3, and 4 were used for practice. Each participant with DS was randomly assigned to one of the two groups. Group 1 (variable practice) practiced the MVC tasks and a two-finger (IM) task in addition to the four-finger (IMRL) ramp task on days 2, 3, and 4 in the same order for each participant (the order of tasks was balanced across participants; practice of different tasks was blocked). Group 2 (blocked practice) practiced only the four-finger (IMRL) ramp task. The total number of trials per practice session was the same in the two groups and equal to 36. Each participant with DS was tested and practiced at approximately the same time of the day. The participants considered the experimental procedure as a competitive computer game. They never complained of being tired.
Data analysis
Data processing was performed off-line using Matlab software. Signals from the force sensors were used to compute the following indices:
For MVC-tests, the finger forces were measured at the moment when the maximal total force value was reached for the explicitly involved fingers. The highest value over the two trials was used as a reference for other tests. These tests were also used to estimate finger-force Jacobians for the data collected in Experiment II: The ratio of the change in the force of each finger to the change in total force up to 40% of the IMRL MVC was computed. A 4-by-4 enslaving matrix (ENSL) was then computed:
where Δf j,k and ΔF k are the changes of individual finger force j (j = {index (i), middle (m), ring (r), little (l)}) and the change of total force during the MVC trial when finger k (k = {index (i), middle (m), ring (r), little (l)}) was the instructed master finger. This matrix is a linear approximation of a matrix containing partial derivatives ∂f j,k /∂F k where ∂f j,k and ∂F k are the infinitesimal changes of individual and total finger forces. We will use a term "force mode" for a four-dimensional finger force vector measured during a single-finger task and corresponding to a column in the ENSL matrix.
In Experiment I, finger-force Jacobians were estimated using the single-finger ramp force production trials. The ratio of the change in the force of each finger to the change in total force during the ramp was computed. For each single-finger ramp trial, the onset of the ramp and time at which 40% MVC was reached were determined. Although the target force in the main experimental series was 30% of MVC, we had participants exert forces up to 40% MVC in these trials to ensure that the relations between individual finger forces and the total force were linear beyond the actual range of forces used in the experiments. For each trial, data between these points were used for further analysis. Because the ramp time of each trial was not as consistent for individuals in the DS group compared to the adult control participants, the ramp of each trial (i.e., from 0% to 40% MVC) was normalized to 100% using a cubic spline fit. The mean ramp across trials was then obtained. The change of total force and of each individual finger force was determined, and a 4-by-4 enslaving matrix was then constructed as in Eq. 1.
Ignoring the effects of enslaving, the following formulation of the relationship between variations in individual finger forces and changes in the total force (FTOT) would apply.
The enslaving effect, however, induces a structure in the variability of individual finger forces that may be unrelated to a particular task variable. To eliminate such enslaving-induced correlations, we transform the variations of individual finger forces into a set of force modes, m:
When, for instance, the instruction asks for only the index finger to be used, the corresponding mode is [1 0 0 0]T, which leads to the observed patterns of finger forces variations through the inverse transformation:
Change in total force can now be expressed as a function of the mode variables:
We tested two hypotheses, force-control and moment-control (see "Introduction"). The first hypothesis was that FTOT was stabilized against fluctuations in finger forces (force-control hypothesis). This hypothesis accounts for one degree of freedom, so that the four-dimensional space of the finger forces is redundant. In addition, in Experiment 2 we tested a hypothesis about controlling the total moment about the longitudinal axis of the hand/forearm (moment-control hypothesis). For this analysis, the vector [1 1 1 1] is replaced by the lever arms of each finger force with respect to the axis, [lI lM -lR -lL] reflecting the fact that moments produced by the index and middle finger are in the opposite direction to those produced by the ring and the little finger. The analysis was performed at each percentage of the time-normalized ramp trajectories from the beginning to the end of the ramp. At each time, we assumed that the mean total force (force-control hypothesis) or the mean total moment (moment-control hypothesis) across all trials represented the value that the CNS tries to stabilize. These values were calculated from the means of the individual finger forces (ƒ 0) across all task repetitions. Thus, in Eqs. 2, 3 and 4, df j = (ƒ−ƒ 0). The mean values of the individual finger forces constitute the reference force configurations for each interval of analysis. The linearized model is described by Eq. 5 above when accounting for the effects of enslaving. Multiplying the vector of force deviations from the mean by the inverse of the enslaving matrix [i.e., ENSL−1 * (ƒ−ƒ 0)] yields deviations in force modes.
An uncontrolled manifold can be computed in the space of the mean-free finger force modes. It represents individual finger force mode combinations that are consistent with a stable value of total force (dFTOT = 0). The manifold is approximated linearly by the null-space spanned by basis vectors, e i , solving
For both force-control and moment-control hypotheses, the null space has one dimension. The basis, e i , of the null space was computed numerically across trials at each time-normalized sample.
UCM analysis across trials
This typical UCM analysis was performed only for the participants in Experiment 1. The vector of individual mean-free finger force modes, obtained at each time-normalized sample of each trial of the force ramp, i.e., m = ENSL−1 * (ƒ−ƒ 0), was resolved into its projection onto the null space:
and into its projection onto a perpendicular to the null space:
In Eqs. 7 and 8, 'd' is dimensionality of the task space (d = 1) and 'n' is the number of DOFs of the motor elements, n = 4 (I, M, R, and L fingers). Thus, the null space has the dimensionality n−d. The variance (across trials) of the vector projections within the UCM was estimated as
where \({{\left| {f_{\parallel } } \right|}^{2} }\) is the squared length of the deviation vector lying within the linearized UCM. Analogously, the variance (across trials) of the projections perpendicular to the UCM was estimated as
Note that the above Eqs. 9 and 10 are normalized to the appropriate number of DOFs, and the variables they define are the primary dependent variables for subsequent analyses. In the remainder of this article, we refer to the two components as the variance per DOF within the null-space or UCM (VUCM) and the variance orthogonal to the UCM (VORT). To simplify the statistical analyses, the variance components were averaged over each third of the force ramp, yielding measures for the early (approximately 0–10% of MVC), middle (approximately 11–20% of MVC) and late (approximately 21–30% of MVC) segments of the ramp.
UCM analysis of individual trials
The UCM analysis performed within a trial follows the same logical structure as outlined above. However, that described procedure is based on analysis of the variance in the finger force space with respect to average values of finger forces across many trials performed separately at each percentage of the force ramp. Single-trial UCM analysis is based on computation of the variance in the finger force space computed across all samples in time over a particular segment of the ramp. This variance is computed with respect to the mean of the de-trended values of finger forces based on an assumed constant sharing pattern over the trial period. The analysis was performed separately over the early, middle and late segments of the ramp, each segment being one second long. Thus, the variance components in Eqs. 9 and 10 were summed over samples, not over trials.
This single-trial UCM analysis is only possible in special cases, as it assumes that the Jacobian matrix reflecting the relationship between the outputs of elements and a selected performance variable does not change throughout the trial. This is not always the case. For example, during multi-joint arm movements, the Jacobian reflects the relationship between joint motion and the position of the hand in external space, which is affected by the geometry of the effector. This condition is met, however, during the multi-finger force production tasks because the enslaving remains relatively unchanged within the force range up to the MVC (Li et al. 1998; Zatsiorsky et al. 1998, 2000). Hence, the ENSL matrix may be assumed to remain unchanged over the duration of the ramp force production trials thus making a single-trial UCM analysis possible. Our first step was to de-trend the force ramps, eliminating differences in the mean value of finger forces across the period of the ramp over which the analysis was performed (i.e., over each segment of the ramp). This de-trending was performed in two different ways in an attempt to uncover possible different sources of the UCM-effect.
-
1.
First, the force data for individual fingers were low-pass filtered with a cutoff of 4 Hz using a 2nd-order Butterworth filter. The slopes of the total force ramps were then calculated. Next, the median share (SHM) of each finger (i.e., its contribution to the total force) across the ramp was determined. The predicted force of each finger was then calculated as [min(f k) + (S*SHM,k*t)], where k=I, M, R or L fingers, min(f k) is the individual finger force at the onset of the ramp (typically close to 0), S is the slope of the total force ramp, SHM,k is the median share of finger k, and 't' is time. The de-trended finger force was then obtained by subtracting the predicted finger force from the actual force produced during the ramp. This yielded a force time series fluctuating about zero force. These de-trended forces were then used in the UCM analysis as described above. Figure 1 displays typical force profiles in Experiment I for the four fingers before (panels A and D) and after de-trending (panels B and E) with this method. The left panels of Fig. 1 show data for the four-finger ramp task with unchanged (natural) sharing, while the right panels of Fig. 1 show data for the four-finger ramp task with a purposeful change in the sharing during the trial (varied sharing).
Fig. 1. 
An illustration of time series of forces produced by individual fingers (panels A and D), same forces after low-pass filtering and linear de-trending (panels B and E), and after high-pass filtering (panels C and F). The left panels show signals for the instruction to produce a ramp profile of total force by naturally pressing with the four fingers on force sensors. The right panels show signals under the instruction to change the sharing pattern in the course of the trial. Data for a representative control participant are shown
-
2.
We assume a hierarchical system of control where a higher level defines a sharing pattern of finger forces and a lower level (synergy level) is organized to ensure error compensation among individual finger forces. However, changes in the sharing pattern may also lead to differences between the two components of variance as computed using Eqs. 9 and 10. We expected voluntary changes in the sharing to happen more slowly than adjustments of finger forces at the lower level. Hence, we applied a high-pass filter at 4 Hz to the force time-series before performing the UCM analysis. The 4-Hz cutoff frequency was arrived at after trying different frequency cut-offs as that which most consistently removed the effect of voluntarily changing the share pattern during the ramp by participants in Experiment I. Results of using this high-pass filter procedure are illustrated in the bottom panel of Fig. 1 for the same trials depicted in the top panel.

Statistics
For all analyses reported in this article, we used the normalized difference between VUCM and VORT. This difference was calculated as VD = (VUCM − VORT)/VTOT, where VTOT is the total finger force variance per DOF. Values of VD between 0 and 1 indicate that VUCM >VORT, i.e., that relatively more of the variance of individual finger forces is consistent with a stable value of the selected performance variable (total force or total moment) than the variance which changes that variable. The closer the value of VD is to 1, the greater is this effect. Differences in this measure across factors for a given group of participants in Experiments I and II were tested using repeated measures ANOVAs. Comparisons between the DS and CS groups in Experiment II were performed using a mixed-effects model.
Experiment I
Two ANOVAs were performed. The first ANOVA tested differences between the outcomes of UCM analyses performed across and within trials. The repeated factors in this analysis were type of analysis (across trials and within trial) and segment of the ramp (early, middle, late). The second ANOVA tested differences in UCM effects when participants performed the ramp with unchanged sharing patterns and when participants voluntarily varied their sharing pattern during the ramp. The repeated factors were sharing (unchanged and varied) and detrending procedure (linear de-trending and high-pass filtering). Only participants within Experiment I performed the condition involving varied sharing.
Experiment II
Mixed-effects ANOVAs were performed to test for differences in UCM effects between the CS and DS groups prior to and following training. A separate ANOVA was performed on VD resulting from a UCM analysis to test differences between the force-control and moment-control hypotheses. Repeated-measures ANOVAs were used to test for differences in UCM-effects between pre- and post-training sessions for participants with DS.
Results
UCM analysis within vs. across trials
In Experiment I, the results of the single-trial UCM analysis were validated by comparison to results of the typical UCM analysis performed across trials, for the ramp force production task with unchanged sharing pattern. The force control hypothesis was tested. To review, for the typical analysis, the variance across trials was partitioned into the components VUCM and VORT separately at each percentage of the ramp, and then averaged over each third of the ramp. For the single-trial analysis, the forces were first de-trended and then the variance across all percentages within each segment of the ramp was decomposed into VUCM and VORT, separately for each trial. These results were then averaged across trials.
An example of the time profiles of finger forces produced during one representative ramp trial is illustrated in Fig. 1A. Note that the share of each finger remained relatively constant throughout the ramp trial, particularly when compared to the data with varied sharing presented in Fig. 1D.
The variance of finger forces across all trials of one representative participant is illustrated in Fig. 2A. Also illustrated are the variance of the total force (thin, dashed line) and the sum of the variances of the four fingers (thick, dashed line). The fact that the variance of total force was substantially lower than the sum of the variances of individual finger forces indicates that the fingers were organized in a synergy to minimize the effect of individual finger force variance on total force production. This was a consistent feature of the data of all eight participants.

Experiment I. Time profiles of variances of individual finger forces computed across a series of repetitions by a representative participant. Time profiles of the variance of total force (thin, dashed line) and of the sum of the variances of individual finger forces (thick, dashed line) are also shown for conditions when the participant performed with a natural sharing pattern (panel A) and when the participant intentionally changed the sharing pattern throughout the trial (panel B)
The comparison of results from the within (solid fill) and across-trial (hatched fill) UCM analysis are illustrated in Fig. 3, where the difference between VUCM and VORT (VD), normalized to the total variance per DOF is presented (see "Materials and methods"). The ANOVA revealed a significant effect of analysis type (F (1,7)=7.6, p<0.05). However, there was also a significant interaction of segment by analysis type (F (2,14)=8.3, p<0.01). Post hoc analyses revealed that the interaction was due to the fact that VD was positive (i.e., VUCM>VORT) when performing the analysis across trials but negative (i.e., VUCM<VORT) for the single-trial analysis at relatively low forces (the first segment of the force ramp). In contrast, VD did not differ between the analysis types for the middle (p = 0.052) and especially for the late segment (p = 0.773) of the ramp.

Experiment I. Index of the structure of finger force variance (VD) computed for the force control hypothesis averaged across participants (with standard error bars) is shown for the three segments of the force ramp. The index was computed either across a set of trials (hatched bars) or across time samples within a single trial (solid bars). Differences are seen at low forces (the early ramp segment), and they disappear at higher forces
All further analyses reported in this article used the single-trial UCM analysis, particularly because of the limited trials available for the participants with DS and their matched controls.
Effect of voluntary change in sharing pattern
The next analysis sought to determine whether UCM-effects (i.e., differences between VUCM and VORT) occurring at the level of defining the sharing pattern could be distinguished from those occurring at the synergy level, with respect to the force-control hypothesis. The ability to make such a distinction would be especially important in studies of certain subpopulations who could voluntarily change their force sharing pattern uninstructed (e.g., DS, Latash et al. 2002a).
We first quantified the UCM-effects when participants voluntarily varied the share of their fingers during the ramp. The single-trial UCM analysis was performed on these data after de-trending (see above), which was not expected to change effects of the voluntary change in sharing (cf. the upper and middle panels of Fig. 1), and after high-pass filtering the data, which was expected to attenuate effects of purposeful, relatively slow changes in the sharing (the lower panels of Fig. 1).
An example of finger forces for a trial performed under the instruction to intentionally change the share of each finger during the ramp is illustrated in Fig. 1D. In this example, the ring and little fingers contributed most to total force in the beginning of the ramp, whereas at the end of the ramp the index and middle fingers' contribution increased substantially. The variance profiles for the condition involving varied sharing are illustrated in Fig. 2B. Note the fluctuations of the variance of individual fingers and of their sum in the second condition while the variance of total force remained relatively stable throughout the ramp (thin dashed line).
Figure 4 illustrates the effect of voluntarily changing the sharing pattern on the index VD introduced for the single-trial UCM analysis. The first two bars presented at each segment of the ramp are the results for the unchanged (diagonal fill) and voluntarily changed (black fill) sharing pattern after the data were de-trended with LPF as described in the Methods. The third (cross-hatched) bar represents the results for the condition involving a voluntary change in sharing after the high-pass filtering at 4 Hz. Regardless of condition or filtering procedure, VD >0, i.e., VUCM >VORT in the middle and late segments.

Experiment I. Index of the structure of finger force variance (VD) computed for the force control hypothesis, averaged across participants (with standard error bars) is shown for the three segments of the force ramp. Single-trial UCM analysis was used. The index was computed for trials without purposeful changes in the sharing pattern (unchanged sharing) after de-trending and low-pass filtering, and for trials with purposeful changes in the sharing pattern (varied sharing). In the latter case, results after low-pass filtering (LPF) with linear de-trending (solid, black bars) and after high-pass filtering (HPF, striped bars) are shown. Note that HPF removes differences between the two sets of trials, particularly at higher forces
After linear de-trending, VD was substantially and significantly higher when participants voluntarily changed their sharing pattern in the course of performing the ramp compared to the unchanged sharing condition (F (1,6) = 65.3, p < 0.0001). While there was also an effect of segment (F (2,12) = 35.6, p < 0.0001), reflecting the higher indices for the later segments, there was not a segment by condition interaction (p = 0.53).
The results of UCM analysis of the force data from the condition involving a voluntary change in sharing differed when the data were high-pass filtered. Comparison to the unchanged sharing condition after de-trending resulted in a significant effect of condition (F (1,6) = 7.23, p < 0.05), but there was also a significant interaction of condition (unchanged vs. changed sharing) and segment (F (2,12) = 19.8, p < 0.0001). Post-hoc analysis revealed that the conditions differed only for the first segment, i.e., at low forces (F (1,6) = 34.0, p < 0.0001), but not at the moderate (p = 0.064) or high forces (p = 0.779). Thus, de-trending using the high-pass filter appears to have effectively removed the effects of voluntary changes of the sharing pattern on the relation between VUCM and VORT, at least at forces above about 10% of the participants' MVC.
Effect of practice on a multi-finger synergy in persons with Down syndrome
In this section, we report the results from the single-trial UCM analysis performed on the data of persons with DS and their matched controls performing a ramp force production task. Analyses of individual finger force control and multi-finger coordination, including a report of differences in force variability, can be found in Latash et al. (2002). Originally, UCM analysis was not performed because the number of trials typically needed to perform the across-trials UCM analysis could not be obtained with the DS group, and single-trial UCM analysis was unavailable. Hence, we revisit these data using the single-trial UCM analysis.
Single-trial UCM after low-pass filtering and de-trending with a linear fit
Both CS and DS groups showed a relation between VUCM and VORT suggesting stabilization of total force, i.e., VD >0. Figure 5A presents the VD index computed for the force-control hypothesis for the CS group and for the DS group prior to and following training. Prior to training, VD was higher for the later segments of the ramp, i.e., at higher forces (main effect of SEGMENT, F (2,40) = 6.42, p < 0.01). Although VD was, on average, larger in the CS group than the DS group, this difference was not significant (p = 0.30).

Experiment II. Index of the structure of finger force variance (VD) computed for the force control hypothesis (panel A) and moment control hypothesis (panel B), using single-trial UCM analysis. Data were averaged across participants (with standard error bars) for the three segments of the force ramp. Index was computed after de-trending and low-pass filtering (LPF) for control participants (CS) and participants with Down syndrome (DS), both pre- and post-training. VD for the force control hypothesis (A) increased significantly with training in DS participants while there were no changes in VD for the moment control hypothesis (B)
Practice by participants with DS resulted in higher VD, as compared to the pre-practice data (F (1,10) = 12.8, p < 0.01). This difference was due to both a decrease in VORT (0.24 ± 0.04 vs. 0.18 ± 0.03; F (1,10) = 5.56, p < 0.05), leading to smaller errors in the total force production, and to an increase in VUCM (0.40 ± 0.07 vs. 0.72 ± 0.19), although this latter increase did not reach significance (p = 0.11). After practice, VD indices in the DS group were higher than in the CS group at all segments of the ramp. However, the main group effect was just under the level of significance (F (1,20) = 4.26, p = 0.052), as was the segment by group interaction (p = 0.095).
Single-trial UCM after high-pass filtering
Results after high-pass filtering the force data were consistent with those described in the previous subsection. The VD indices for the force-control hypothesis in the DS group became significantly higher after practice (0.52 ± 0.10 vs. 0.16 ± 0.11; F (1,10) = 8.33, p < 0.05). In contrast to the result following linear de-trending of the force data, this enhancement of VD in the DS group was due to a significant increase in VUCM (F (1,10) = 5.4, p < 0.05; 0.044 ± 0.009 pre-training vs. 0.078 ± 0.015 post-training), while VORT did not change significantly across training (p = 0.43).
UCM results related to moment-control
UCM analysis was also performed with respect to another performance variable, the total pronation/supination moment produced by all four fingers about the longitudinal axis of the hand/forearm. Figure 5B presents VD computed with respect to the moment-control hypothesis. Although only the total force control was an explicit requirement of the task, the structure of the variance of finger forces was consistent with the moment-control hypothesis (VUCM >VORT). Prior to practice, VD did not differ between the DS group and the CS group (p = 0.90). However, in contrast to the force control hypothesis, the increase in VD from the pre-practice to the post-practice session was not significant for the participants with DS (p = 0.191). These results were consistent regardless of the method used to de-trend the force data.
Discussion
The current study addresses a number of issues related to the formation of multi-element synergies as flexible structures able to stabilize certain performance variables. First, we will discuss results of the across-trials and single-trial UCM analysis from Experiment I within a two-level control scheme (Schöner 1995) described in "Introduction." Then, we will use results of the re-analysis of an earlier published data set (Experiment II, Latash et al. 2002a) to address the third question formulated in the Introduction: Can single-trial UCM analysis be used to analyze atypical motor coordination and its changes with practice in persons with DS?
UCM effects emerging at different levels of control
During multi-finger ramp force production tasks, typical participants show nearly parallel changes in the forces of individual fingers (Li et al. 1998; Latash et al. 2002a) suggesting that there are no changes in the sharing pattern over the course of a trial. This leads us to assume that there are no adjustments at the higher (motor planning) level during such a trial. Hence, co-variation of individual finger forces leading to selective stabilization of particular performance variables has been assumed to emerge at the lower (timing) level (Latash et al. 2001, 2002b; Scholz et al. 2002).
However, atypical participants may be expected to show changes at the higher level of the motor control scheme leading, in particular, to major changes in the sharing pattern. The task of ramp force production by a set of fingers is easy for typical participants. However, it was perceived as challenging by most of the participants with DS (Latash et al. 2002a). These persons were more likely to be dissatisfied with their performance and tried to introduce corrections into apparently suboptimal total force profiles in the course of individual trials. As a result, major changes in the sharing pattern of total force among fingers could be observed. These changes could contribute to the differences between the two components of finger force variance VUCM and VORT. This reminds us of the fact that UCM-effects may originate from different levels of the control scheme.
We have argued elsewhere that error compensation is an important feature of multi-finger synergies (Latash et al. 1998, 2002b). With respect to stabilizing the total force produced by several fingers, error compensation is expected to be reflected in relatively unchanged total force in the presence of considerable variability in the forces of individual fingers. For simplicity, consider only two fingers. Error compensation means predominance of negative co-variations between the two finger forces. Major changes in the sharing pattern without a change in the total force profile are expected to lead to such negative co-variations between finger forces meaning that error compensation can occur at the higher (motor planning) level. On the other hand, even in the absence of apparent changes in the sharing pattern, as in typical participants, negative co-variations in the finger forces can be observed also leading to error compensation (Scholz et al. 2002; Latash et al. 2002b). These are presumed to originate at the lower (timing) level.
Our observations of changes in the sharing pattern in participants with DS, as well as in typical participants who were asked to change the sharing pattern purposefully in the course of a ramp trial have suggested that changes in the sharing pattern occur relatively slowly (cf. Fig. 1). On the other hand, error compensation at the lower level is expected to occur on a faster time scale. We used different filtering and de-trending procedures in an attempt to separate the contributions to the observed differences between the two variance components resulting from purposeful changes in the sharing pattern compared to adjustments at the timing level. In particular, we expected low-pass filtering combined with linear de-trending to preserve the effects of voluntary changes in the sharing on the structure of motor variability, while the high-pass filtering alone was expected to attenuate or even eliminate these effects.
In particular, we asked typical participants to voluntarily change their sharing pattern while producing the ramp force. The effect of a voluntary change in sharing was quite dramatic: the difference between VUCM and VORT (i.e., VD) increased compared to a ramp force-production task performed without a change in the sharing. High-pass filtering of the force data largely removed the differences in VD between these two tasks. The results of this experiment suggest, therefore, that the two methods of de-trending could be used, in principle, to distinguish UCM effects originating at different control levels of the hypothetical hierarchy. We then applied this procedure to the data from the study of persons with DS (Latash et al. 2002a) to determine if such control distinctions can be identified when participants are instructed only to perform the ramp force-production task, i.e., without additional instructions about changing their sharing pattern. These observations will be discussed in a following subsection.
Single-trial and across-trials UCM analyses
Performing the UCM analysis across multiple trials compared to across multiple points in time within a trial addresses somewhat different issues. In the first case, a UCM is defined with respect to the mean (across trials) value of an important performance variable at each point in time (Scholz and Schöner 1999), the instantaneous total force or total moment in the present context. This mean value is used as an estimate of a value of the hypothesized performance variable, total force or total moment, which the control system tries to stabilize. Variance in the space of the motor elements that lies within this UCM reflects different combinations of those elements that are consistent with the mean value of the performance variable. Thus, this variance (referred to here as VUCM and elsewhere as goal-equivalent variability or GEV—see Scholz et al. 2001) reflects the use of solutions to element coordination that are equivalent with respect to achieving a particular value of a performance variable.
In contrast, decomposing the variance using a single-trial UCM analysis is based upon the mean value of the de-trended force across time. In principle, this analysis could be performed across all time samples within a trial. In the present study, we performed the analysis across each of three equal segments of the ramp to help distinguish between the effects at different force levels. This single-trial analysis, then, addresses the following question: If a finger's de-trended force fluctuates over time within a trial, to what extent do the fluctuations of other fingers' force negatively co-vary with it to limit deviations of total force from a desired temporal pattern? Note that both methods potentially reflect effects from both control levels. However, for movements performed by typical participants, changes in the sharing pattern are more likely to happen across trials than within a trial (cf. Li et al. 1998).
Despite these differences, both analyses provide an indication of the extent to which the motor elements are coordinated to stabilize a particular performance variable. Indeed, we found that the results of the two analyses provided similar results, especially for forces over 10% of the MVC (middle and late segments of the task). Note that, at low values of force, typical participants have been reported to show predominantly positive co-variations of individual finger forces leading to destabilization of total force (Scholz et al. 2002; Shinohara et al. 2003). The origins of this unusual behavior at low forces are unclear; it can be seen in Fig. 4 as the negative value of the normalized difference between the two components of variance in trials without changing the sharing pattern.
The finding of similarities between the results of the across-trials and single-trial UCM approaches is important from a clinical perspective. Many patients cannot perform multiple trials of a task because of fatigue or other factors that may impair the ability to repeat actions (Staub and Bogousslavsky 2001; Van Zandvoort et al. 1998). In addition, younger children as well as some patients may be unable to maintain attention to the task for a sufficient length of time to acquire an adequate number of trials to obtain stable estimates of variance for the across-trials UCM analysis (e.g., Green et al. 1989; Mirsky and Allan 1995). Thus, the option of performing the analysis within single trials facilitates the study of multi-element coordination in such groups. We would emphasize, however, that this is only possible where the contributions of the motor elements to the functional output remain relatively unchanged as the value of that output changes. This would not be the case, for example, with respect to the joint coordination at different points in the hand's spatial path during reaching. In that case, changes in the configuration of the arm during the reach lead to changes in the Jacobian matrix that relates joint rotations to hand displacement.
Multi-finger coordination in persons with DS and its change with practice
Movements of persons with DS show characteristics different from those seen in persons without DS, such as prolonged reaction time, slowness, preference for muscle co-contraction patterns, and high safety margins (Almeida et al. 1994, 2001; Anson 1992; Aruin et al. 1996; Cole et al. 1988; Latash et al. 1993). These characteristics are likely to contribute to the overall impression of clumsiness of movements of persons with DS (Latash 1992). Persons with DS show deficits in motor planning (Welsh and Elliott 2000) and timing (Chiarenza 1993; Spano et al. 1999; Ringenbach et al. 2002). In particular, children with DS are highly impaired in fine motor skills that depend on accuracy and timing in bimanual coordination and in tasks requiring manual dexterity assessed in both hands separately. Interestingly, more evident impairment in bimanual coordination has been reported in older children (Spano et al. 1999).
Apparently, at least some of the atypical features of movement patterns can be changed within a relatively brief period of training. In particular, 3 days of practice of fast single-joint movements to a target resulted in a dramatic improvement in movement speed, and the emergence of typical tri-phasic patterns of muscle activation (Almeida et al. 1994). Edwards and colleagues (Edwards and Elliott 1989; Edwards et al. 1986) showed effects of practice and interlimb transfer in studies of sequential finger lifting tasks. A more recent study has shown that three days of practice are sufficient to lead to an improvement in the control of a set of fingers acting together to produce an accurate ramp profile of total force (Latash et al. 2002a). The most dramatic effects of practice were reported to be in indices of finger coordination: Individuals with DS improved the accuracy of their performance in the ramp tasks and changed the interaction among the finger forces. The latter was assessed using two indices of force variance, the variance of total force (VarFTOT) and the sum of the variances of individual finger forces (∑VarFi). Note that if ∑VarFi >VarFTOT, negative covariations dominate leading to partial compensation of errors introduced by individual fingers in separate trials. If ∑VarFi <VarFTOT, positive covariations dominate leading to amplification of errors introduced by individual fingers.
Prior to practice, the difference between ∑VarFi and VarFTOT was negative throughout the ramp trial. After practice, the difference increased and became positive for the middle and late segments of the force ramp, more similar to the performance of the CS group. This result suggests that training in the DS group resulted in new patterns of coordination among the fingers such that changes in the value of an individual finger's force led to changes in the forces of other fingers that minimized the variance of total force.
The method of comparing ∑VarFi and VarFTOT used by Latash et al. (2002) to study finger coordination, however, is limited for a number of reasons. First, the approach does not take into account the fact that finger forces are not independent because of the enslaving (Li et al. 1998). Taking enslaving into account may be particularly important for studies of persons with DS who have been reported to show higher enslaving (Latash et al. 2002a) and increased ipsilateral overflow, resembling enslaving, in sequential finger lifting tasks (Edwards and Elliott 1989). In contrast, the UCM approach incorporates a formal model of enslaving to help disambiguate such effects. In addition, a direct comparison of force variances cannot shed light on the control of performance variables other than total force. For example, Scholz et al. (2002) have shown that in three and four finger force production tasks, both total force and the moment about the longitudinal axis of the hand/forearm can be stabilized simultaneously during certain portions of a force production task. Hence, one purpose of the current analysis of the same data set has been to confirm the conclusions reached in Latash et al. (2002a) and to test whether persons with DS were indeed able to show stabilization of both total force and total moment as it was reported for typical participants.
Results of the current UCM analysis generally confirm the previous results with respect to total force control in individuals with DS. In contrast to the previous report, however, when the effects of enslaving were taken into account, the individual fingers were shown to be coordinated to stabilize the total force (VD >0) both prior to and following training. This difference in the results of the two analyses makes sense when one considers that enslaving results in positive co-variations among the finger forces. It could be expected to lead to amplification of individual errors in finger force production at the level of total force. Apparently, the control effects reflected by VD >0 in the pre-training analysis did not adequately overcome the positive co-variation due to built-in enslaving, resulting in VarFTOT >∑VarFi. Practice of the task by the DS group resulted in stronger UCM-effects, consistent with the results presented in the previous report (see below).
Persons with DS show high variability (Latash and Corcos 1991; Almeida et al. 1994); hence, the single-trial UCM method is particularly important for them. This finding is in line with earlier published observations on their higher indices of motor variability. On the other hand, persons with DS have been reported to pay particular attention to accuracy in tasks that required both speed and accuracy (Kerr and Blais 1987; Latash 1992; Almeida et al. 1994). In our test, however, the timing of the force ramp task was imposed on the participants (they had to produce 25% of the MVC in exactly 3 s) such that they could not slow down to increase accuracy. This lack of room for trading speed for accuracy probably prevented our participants from performing as accurately as described in other studies (Kerr and Blais 1987; Almeida et al. 1994).
Participants in both the CS and DS groups also were shown to exhibit a structure of individual finger force variances that was consistent with stabilization of the pronation/supination moment (i.e., VUCM >VORT). This result would not be possible for a minimally redundant, two-finger force production task. Thus, with more degrees-of-freedom, the control of additional performance variables is possible and is actually achieved by persons with DS. However, VD related to this control hypothesis did not change significantly with practice. This finding should not be surprising because improvement in the control of this moment was not an explicit feature of the task. In general, stabilizations of total force and of total moment are in competition with each other because the former favors negative co-variations among finger forces while the latter favors positive co-variations between forces produced by the I and M pair and those produced by the R and L pair. The fact that stabilization of total force was improved in persons with DS and there was no deterioration in the stabilization of moment is non-trivial. It suggests that the CNS uses subtle manipulations of finger forces to improve the performance with respect to one performance variable without sacrificing stability of the other variable.
Motor redundancy or abundance?
The principal of motor abundance (Gelfand and Latash 1998) suggests that the excess degrees of freedom available to the motor system constitutes a 'blessing' rather than a 'curse' of dimensionality. According to this argument, greater exploitation of the available motor abundance should result in improved performance outcome. This hypothesis has been supported recently by a formal model of optimal feedback control (Todorov and Jordan 2002). In particular, Todorov and Jordan have shown that, in contrast to typical trajectory planning models (e.g., Flash and Hogan 1985; Uno et al. 1989), reduced error in task-specific relevant dimensions can be obtained by increasing variability in other, irrelevant dimensions of the space of motor elements. The results of the UCM analysis presented in the present report are in agreement with this work. Persons with DS improved their task performance (reduced total force variability, see Latash et al. 2002) with practice of the task. Accompanying this improved performance was a drop in the variance component that affected total force (VORT) and an increase in the component of variance (VUCM) that did not affect total force.
The increased difference between the two variance components (VD) in persons with DS with practice apparently resulted from two factors. There was reduced variability in dimensions that affected the total force profile (VORT) and also increased variability in dimensions that did not affect the total force (VUCM). However, after high-pass filtering that was assumed to remove effects of changes in the sharing pattern emerging at the level of motor planning, only an increase in VUCM was seen but not a drop in VORT. This observation suggests that changes at the level of motor planning were responsible for the improvement of the overall performance by these participants (the drop in the variance of the total force reported by Latash et al. 2002a) while changes at the timing level channeled most of the variance into VUCM. Thus changes at both levels of the putative control hierarchy apparently play important roles in improving performance of the task.
That the CNS takes advantage of the abundant solutions available to it to achieve reliable control of important performance variables is not a new idea (Bernstein 1967; Buchanan and Kelso 1989; Cole and Abbs 1986, 1987; Kelso et al. 1984; Kugler et al. 1980; Turvey 1990). The UCM approach provides a formal method for identifying such a control strategy that has been applied successfully to the study of a variety of tasks (Latash et al. 2001; Scholz and Schöner 1999; Scholz et al. 2000, 2001) as well as to the learning of such tasks (Domkin et al. 2002). In this article, a novel and exciting extension of that approach has been explored. Our results show that the application of a modified UCM approach to a single trial yields UCM-effects consistent with those obtained when the typical UCM approach is applied across multiple trials. While this extension is limited to tasks with relatively unchanged relations between outputs of individual motor elements and a selected important performance variable, the single-trial UCM approach allows studies of motor coordination in persons who cannot be reasonably expected to perform many trials without changing their control strategy. The demonstration of changes in indices of motor coordination with practice in persons with DS promises successful application of this method to studies of changes in coordination with motor rehabilitation.
References
Almeida GL, Corcos DM, Latash ML (1994) Practice and transfer effects during fast single joint elbow movements in individuals with Down syndrome. Phys Ther 74:1000–1016
Almeida GL, Corcos DM, Hasan Z (2000) Horizontal-plane arm movements with direction reversals performed by normal individuals and individuals with Down syndrome. J Neurophysiol 84:1949–1960
Aruin AS, Almeida GL (1996) A co-activation strategy in anticipatory postural adjustments in persons with Down syndrome. Motor Control 1:178–191
Aruin AS, Almeida GL, Latash ML (1996) Organization of a simple two-joint synergy in individuals with Down syndrome. Am J Ment Retard 101:256–268
Bernstein NA (1967) The co-ordination and regulation of movements. Pergamon, Oxford
Buchanan JJ, Kelso JA (1999) To switch or not to switch: recruitment of degrees of freedom stabilizes biological coordination. J Mot Behav 31:126–144
Chiarenza GA (1993) Movement-related brain macropotentials of persons with Down syndrome during skilled performance. Am J Ment Retard 97:449–467
Cole KJ, Abbs JH (1986) Coordination of three-joint digit movements for rapid finger-thumb grasp. J Neurophysiol 55:1407–1423
Cole KJ, Abbs JH (1987) Kinematic and electromyographic responses to a perturbation of a rapid grasp. J Neurophysiol 57:1498–1510
Domkin D, Laczko J, Jaric S, Johannson H, Latash ML (2002) Structure of joint variability in bimanual pointing tasks. Exp Brain Res 143:11–23
Edwards JM, Elliott D (1989) Asymmetries in intermanual transfer of training and motor overflow in adults with Down's syndrome and nonhandicapped children. J Clin Exp Neuropsychol 11:959–966
Edwards JM, Elliott D, Lee TD (1986) Contextual interference effects during skill acquisition and transfer in Down's syndrome adolescents. Adapt Phys Act Q 3:250–258
Flash T, Hogan N (1985) The coordination of arm movements: an experimentally confirmed mathematical model. J Neurosci 5:1688–1703
Gelfand IM, Latash ML (1998) On the problem of adequate language in motor control. Motor Control 2:306–313
Gelfand IM, Tsetlin ML (1966) On mathematical modeling of the mechanisms of the central nervous system. In: Gelfand IM, Gurfinkel VS, Fomin SV, Tsetlin ML (eds) Models of the structural-functional organization of certain biological systems. Nauka, Moscow (in Russian, a translation is available in 1971 edn by MIT Press, Cambridge, MA), pp 9–26
Green JM, Dennis J, Bennets LA (1989) Attention disorder in a group of young Down's syndrome children. J Ment Defic Res 33:105–122
Kelso JAS, Tuller B, Vatikoitis-Bateson E, Fowler CA (1984) Functionally specific cooperation following jaw perturbations during speech: evidence for coordinative structures. J Exp Psychol Hum Percept Perform 10:812–832
Kugler PN, Kelso JAS, Turvey MT (1980) On the concept of coordinative structures as dissipative structures. I. Theoretical lines of convergence. In: Stelmach GE, Requin J (eds) Tutorials in motor behavior. North-Holland, Amsterdam, pp 3–47
Latash ML (1992) Motor control in Down syndrome: the role of adaptation and practice. J Dev Phys Disabil 4:227–261
Latash ML, Corcos DM (1991) Kinematic and electromyographic characteristics of single-joint movements of individuals with Down syndrome. Am J Ment Retard 96:189–201
Latash ML, Almeida GL, Corcos DM (1993) Pre-programmed reactions in individuals with Down syndrome: the effects of instruction and predictability of the perturbation. Arch Phys Med Rehab 73:391–399
Latash ML, Li Z-M, Zatsiorsky VM (1998) A principle of error compensation studied within a task of force production by a redundant set of fingers. Exp Brain Res 122:131–138
Latash ML, Scholz JF, Danion F, Schöner G (2001) Structure of motor variability in marginally redundant multi-finger force production tasks. Exp Brain Res 141:153–165
Latash ML, Kang N, Patterson D (2002a) Finger coordination in persons with Down syndrome: atypical patterns of coordination and the effects of practice. Exp Brain Res 146:345–355
Latash ML, Scholz JP, Schöner G (2002b) Motor control strategies revealed in the structure of motor variability. Exer Sport Sci Rev 30:26–31
Li Z-M, Latash ML, Zatsiorsky VM (1998a) Force sharing among fingers as a model of the redundancy problem. Exp Brain Res 119:276–286
Li Z-M, Latash ML, Newell KM, Zatsiorsky VM (1998b) Motor redundancy during maximal voluntary contraction in four-finger tasks. Exp Brain Res 122:71–78
Mirsky A, Allan F (1995) Perils and pitfalls on the path to normal potential: the role of impaired attention: homage to Herbert G. Birch. J Clin Exp Neuropsychol 17:481–498
Ringenbach SD, Chua R, Maraj BKV, Kao JC, Weeks DJ (2002) Bimanual coordination dynamics in adults with Down syndrome. Motor Control 6:388–407
Robertson SD, Van Gemmert AWA, Maraj BKV (2002) Auditory information is beneficial for adults with Down syndrome in a continuous bimanual task. Acta Psychol 110:213–229
Saltzman E, Kelso JAS (1987) Skilled actions: a task dynamic approach. Psychol Rev 94:84–106
Scholz JP, Schöner G (1999) The uncontrolled manifold concept: identifying control variables for a functional task. Exp Brain Res 3:289–306
Scholz JP, Schöner G, Latash ML (2000) Motor control of pistol shooting: identifying control variables with the uncontrolled manifold. Exp Brain Res 135:382–404
Scholz JP, Reisman D, Schöner G (2001) Effects of varying task constraints on solutions to joint control in sit-to-stand. Exp Brain Res 141:485–500
Scholz JP, Danion F, Latash ML, Schöner G (2002) Understanding finger coordination through analysis of the structure of force variability. Biol Cybern 86:29–39
Schöner G (1995) Recent developments and problems in human movement science and their conceptual implications. Ecol Psychol 8:291–314
Shinohara M, Li S, Kang N, Zatsiorsky VM, Latash ML (2003) Effects of age and gender on finger coordination in maximal contractions and submaximal force matching tasks. J App Physiol 94:259–270
Spano M, Mercuri E, Rando T, Panto T, Gagliano A, Henderson S, Guzzetta F (1999) Motor and perceptual-motor competence in children with Down syndrome: variation in performance with age. Eur J Pediat Neurol 3:7–14
Staub F, Bogousslavsky J (2001) Fatigue after stroke: a major but neglected issue. Cerebrovasc Dis 12:75–81
Todorov E, Jordan MI (2002) Optimal feedback control as a theory of motor coordination. Nat Neurosci 5:1226–1235
Turvey MT (1990) Coordination. Am Psychol 45:938–953
Uno Y, Kawato M, Suzuki R (1989) Formation and control of optimal trajectory in human multijoint arm movement. Biol Cybern 61:89–101
Van Zandvoort MJ, Kappelle LJ, Algra A, De Haan EH (1998) Decreased capacity for mental effort after single supratentorial lacunar infarct may affect performance in everyday life. J Neurol Neurosurg Psychiatry 65:697–702
Welsh TN, Elliott D (2000) Preparation and control of goal-directed limb movements in persons with Down syndrome. In: Weeks DJ, Chua R, Elliot D (eds) Perceptual-motor behavior in Down syndrome. Human Kinetics, Champaign, IL, pp 49–70
Zatsiorsky VM, Li Z-M, Latash ML (1998) Coordinated force production in multi-finger tasks. Finger interaction, enslaving effects, and neural network modeling. Biol Cybern 79:139–150
Zatsiorsky VM, Li Z-M, Latash ML (2000) Enslaving effects in multi-finger force production. Exp Brain Res 131:187–195
Acknowledgements
This study was supported in part by grants AG-018751, NS-35032, and HD-17449 from the National Institutes of Health, USA, and grant IBN-0078127 from the National Science Foundation.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Scholz, J.P., Kang, N., Patterson, D. et al. Uncontrolled manifold analysis of single trials during multi-finger force production by persons with and without Down syndrome. Exp Brain Res 153, 45–58 (2003). https://doi.org/10.1007/s00221-003-1580-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1580-8