
Abstract
The residual symmetry for the \((2+1)\)-dimensional negative-order modified Calogero–Bogoyavlenskii–Schiff (nmCBS) equation is derived from the truncated Painlevé expansion, and is extended to the multiple residual symmetries, which can be transformed to Lie point symmetries by introducing a suitable prolonged system. The nth Bäcklund transformation (BT) related to multiple residual symmetries is given in terms of determinant. More importantly, we obtain the explicit soliton-cnoidal wave interaction solution from a consistent differential equation.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The (\(2+1\))-dimensional negative-order modified Calogero–Bogoyavlenskii–Schiff (nmCBS) equation [1] reads:
or equivalently
In [1], the (\(2+1\))-dimensional nmCBS equation (1.1) was derived by means of the inverse recursion operator [2, 3] of the modified CBS equation, and has multiple soliton solutions.
It is known that symmetry analysis [4, 5] and Painlevé analysis [6, 7] are effective methods to find exact solutions of nonlinear evolution equations (NLEEs) which model various nonlinear phenomena in physics and other related fields [8,9,10,11,12]. Recently, the study of nonlocal symmetry whose infinitesimal generator depends on integral of the dependent variable in a NLEE has attracted a lot of attention, since it can be used to generate exact interaction solutions between a soliton and other types of nonlinear waves. A few years ago, Lou [13] pointed out the connection of nonlocal symmetry with the Painlevé analysis, that is, the residue with respect to the singularity manifold in the truncated Painlevé expansion corresponds to a nonlocal symmetry. Such type of nonlocal symmetry is referred to as the residual symmetry. One can use it to find finite symmetry transformation and novel symmetry reduction through the localization of the residual symmetry [14,15,16,17,18,19]. The nth BT can be found after extending the residual symmetry to multiple residual symmetries [13, 20,21,22,23,24,25]. Hinting at the novel results of nonlocal symmetry reduction, Lou [26] further established the consistent Riccati expansion (CRE)/consistent tanh expansion (CTE) method for obtaining abundant interaction solutions, especially the interaction solution between a soliton and the cnoidal periodic wave [26,27,28,29,30,31,32,33,34]. In addition, by applying this method, we can identify integrability of NLEEs in the sense of having the CRE/CTE.
In this article, we study the residual symmetry and soliton-cnoidal wave interaction solution for the (\(2+1\))-dimensional nmCBS equation (1.1). The outline of the present paper is organized as follows. In Sect. 2, the residual symmetry of the (\(2+1\))-dimensional nmCBS equation is derived through the truncated Painlevé expansion method. Based on the residual symmetry, we obtain the nth BT in the form of determinant. In Sect. 3, we construct the soliton and soliton-cnoidal wave interaction solutions for the (\(2+1\))-dimensional nmCBS equation by solving a consistent differential equation, which is obtained by performing a straightening transformation to the Schwarzian nmCBS equation. Finally, we give some conclusions in Sect. 4.
2 Residual symmetry and nth BT
For the (\(2+1\))-dimensional nmCBS system (1.2), its truncated Painlevé expansion is of the form:
where \(\phi = \phi (x,y,t)\) is the singular manifold, and \(u_0\), \(u_1\), \(v_0\), \(v_1\) and \(v_2\) are functions of x, y and t, which are determined by vanishing all the coefficients of each power of \(\frac{1}{\phi }\) after substituting (2.1) into system (1.2). Some computations give us that:
and the following nonauto-BT
between the (\(2+1\))-dimensional nmCBS system (1.2) and its Schwarzian form
This form is invariant under the Möbius transformation
which implies that the Schwarzian equation (2.4) admits the following Möbius transformation symmetry
Applying the residual symmetry theorem [13] to the (\(2+1\))-dimensional nmCBS system (1.2), it is inferred that the residual symmetry of system (1.2) is given by
We introduce three functions g, h and p defined as
The nonlocal residual symmetry (2.7) can now be localized to a local Lie point symmetry
for the prolonged system (1.2), (2.3) and (2.8). Solving the corresponding initial value problem
we get the finite symmetry transformation, which is stated in the following theorem.
Theorem 2.1
If \(\{u,~v,~\phi ,~g,~h,~p\}\) is a solution of the prolonged system (1.2), (2.3) and (2.8), then so is \(\{{\tilde{u}}(\varepsilon ),~{\tilde{v}}(\varepsilon ),~{\tilde{\phi }}(\varepsilon ),~{\tilde{g}}(\varepsilon ),~{\tilde{h}}(\varepsilon ),~{\tilde{p}}(\varepsilon )\}\), and it is given by
where \(\varepsilon \) is an arbitrary group parameter.
Due to the linearity of the symmetry equation and existence of an infinite number of solutions of the Schwarzian equation (2.4), we can obtain an infinite number of residual symmetries
where \(\phi _i~(i=1,\ldots ,n)\) represent different solutions of the Schwarzian equation (2.4). The symmetries (2.12) can be localized in a similar way, the corresponding result is illustrated as follows.
Theorem 2.2
If \(\{u,~v,~\phi _i,~g_i,~h_i,~p_i,~i=1,\ldots ,n\}\) is a solution of the prolonged system
then the symmetries (2.12) are transformed to local Lie point symmetries
Proof
The linearized system of the prolonged system (2.13) is written as
Without loss of generality, we fix k, \(c_k \ne 0\) while \(c_j = 0\), \(j \ne k\) in Eq. (2.12). From (2.9) we get
For \(j \ne k\), eliminating u and v through Eqs. (2.13c) and (2.13d) by taking \(i = k\) and \(i = j\), respectively, we deduce that
Substituting (2.16a) and (2.16b) into (2.15c) and (2.15d) with \(i = j\), respectively, and eliminating \(\phi _{j,xx}\) and \(\phi _{j,y}\) by means of (2.17), we find
Using (2.15e) with \(i=j\), we have
Taking linear superpositions of the above results for \(k=1,2,\ldots ,n\), the proof of Theorem 2.2 is then completed. \(\square \)
The initial value problem corresponding to Lie point symmetries (2.14) reads
Solving the above initial value problem, we obtain the following result which describes nth BT for the prolonged system (2.13).
Theorem 2.3
If \(\{u,~v,~\phi _i,~g_i,~h_i,~p_i,~i=1,\ldots ,n\}\) is a solution of the prolonged system (2.13), then so is \(\{{\tilde{u}}(\varepsilon ),~{\tilde{v}}(\varepsilon ),~{\tilde{\phi }}_i(\varepsilon ),~{\tilde{g}}_i(\varepsilon ),~{\tilde{h}}_i(\varepsilon ),~{\tilde{p}}_i(\varepsilon ),~i=1,\ldots ,n\}\), and it is given by
where
3 Soliton and soliton-cnoidal wave interaction solutions
We know that the CTE is connected to the truncated Painlevé expansion via the following straightening transformation
This transformation allows us to reduce the truncated Painlevé expansion (2.1) and Schwarzian equation (2.4) to the CTE solution
and a new consistent equation
respectively. Once the solution of the consistent equation (3.3) is given, explicit expressions for u and v can be deduced. In the following, we provide two kinds of exact solutions of the (\(2+1\))-dimensional nmCBS system (1.2), including the soliton solution and soliton-cnoidal wave interaction solution.
3.1 Soliton solution
Equation (3.3) has a quite trivial straight-line solution
which results in the following single soliton solution
3.2 Soliton-cnoidal wave interaction solution
To construct the soliton-cnoidal wave interaction solution, we take the solution of Eq. (3.3) to be
The substitution of (3.6) into the consistent equation (3.3) produces the following elliptic equation
with
Then, (3.6) leads to the interaction solution between a soliton and the F function wave solution of system (1.2) of the form

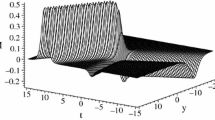
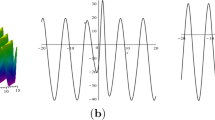
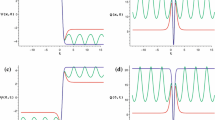
The soliton-cnoidal wave interaction solution (3.12) with the parameters \(\kappa _1 = -1.74\), \(\kappa _2 = 1.2\), \(l_1 = -1.4670776\), \(l_2 = 2\), \(\omega _1 = 1\), \(\omega _2 = 1.5\), \(b_0 = 1\), \(b_1 = 0.135\), \(b_2 = 0.9\), \(m = 0.3\) and \(\gamma = 0\). a, e The profiles at \(t=0\) and \(y=0\), b, f the profiles at \(t=0\) and \(x=0\), c, g the three-dimensional plots, d, h the density plots
It is well known that the elliptic equation (3.7) has Jacobi elliptic functions solution. We take only a simple solution of elliptic equation (3.7) as
where \(\text {sn}(b_2\xi ,m)\) is the Jacobi elliptic sine function. Substituting (3.10) and (3.8) into (3.7) and vanishing the coefficients of different powers of \(\text {sn}(b_2\xi ,m)\), \(\text {cn}(b_2\xi ,m)\) and \(\text {dn}(b_2\xi ,m)\) give rise to
We thus have the following exact soliton-cnoidal wave interaction solution of the (\(2+1\))-dimensional nmCBS system
where \(S=\text {sn}(b_2\xi ,m)\), \(C=\text {cn}(b_2\xi ,m)\), \(D=\text {dn}(b_2\xi ,m)\) and \(X = \frac{1}{2}\kappa _2b_2x + \frac{1}{2}b_2[2\kappa ^2_2\omega _2b^2_2(m^2 - 1) + l_2 ]y - (\omega _1 + \omega _2b_0)t - \frac{1}{2}\ln (D - mC) - \gamma \).
We illustrate the interaction solution (3.12) graphically in Fig. 1. As seen in the figure, a soliton propagates on the cnoidal periodic wave background. This kind of interaction exists in some physical systems, such as the Fermionic quantum plasma system, the unmagnetized plasma system and the magnetized electron-positron-ion plasma system [35,36,37,38].
4 Conclusions
In the present paper, we first derive the residual symmetry using the truncated Painlevé expansion. Then by introducing three functions, this residual symmetry is converted into the Lie point symmetry and the finite symmetry transformation is derived. Furthermore, the multiple residual symmetries, which are a linear superposition of residual symmetries with different solutions of the Schwarzian nmCBS equation, are provided. Analogously, they are also transformed to Lie point symmetries through introducing more functions and nth BT in the determinant form is presented. Finally, via a straightening transformation, we directly derive the CTE solution and a new consistent equation, which yield the exact soliton and soliton-cnoidal wave interaction solutions.
It is well known that many physically important systems are connected to negative-order equations via reciprocal transformations, such as the Camassa–Holm equation and the negative-order KdV equation [39], the Degasperis–Procesi equation and the negative-order Kaup–Kupershmidt equation [40], the Novikov equation and the negative-order Sawada–Kotera equation [41]. Whether one can find a physically meaningful system reciprocally linked to the (\(2+1\))-dimensional nmCBS equation (1.1) is a very interesting issue to be clarified by further study.
References
A.M. Wazwaz, Negative-order forms for the Calogero-Bogoyavlensky-schift equation and the modified Calogero-Bogoyavlensky-Schiff equation. Proc. Rom. Acad. Ser. A 18, 337–344 (2017)
J.M. Verosky, Negative powers of Olver recursion operators. J. Math. Phys. 32, 1733–1736 (1991)
S.Y. Lou, W.Z. Chen, Inverse recursion operator of the AKNS hierarchy. Phys. Lett. A 179, 271–274 (1993)
P.J. Olver, Applications of Lie Groups to Differential Equations (Springer, New York, 1993)
G.W. Bluman, A.F. Cheviakov, S.C. Anco, Applications of Symmetry Methods to Partial Differential Equations (Springer, New York, 2010)
J. Weiss, M. Taboe, G. Carnevale, The Painlevé property for partial differential equations. J. Math. Phys. 24, 522–526 (1983)
R. Conte, Invariant Painlevé analysis of partial differential equations. Phys. Lett. A 140, 383–390 (1989)
S.F. Tian, The mixed coupled nonlinear Schrödinger equation on the half-line via the Fokas method. Proc. R. Soc. A 472, 20160588 (2016)
S.F. Tian, Initial-boundary value problems for the general coupled nonlinear Schrödinger equation on the interval via the Fokas method. J. Differ. Equ. 262, 506–558 (2017)
S.F. Tian, Initial-boundary value problems of the coupled modified Korteweg–de Vries equation on the half-line via the Fokas method. J. Phys. A Math. Theor. 50, 395204 (2017)
X.B. Wang, S.F. Tian, L.L. Feng, T.T. Zhang, On quasi-periodic waves and rogue waves to the (4+1)-dimensional nonlinear Fokas equation. J. Math. Phys. 59, 073505 (2018)
W.Q. Peng, S.F. Tian, T.T. Zhang, Breather waves and rational solutions in the (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Comput. Math. Appl. 77, 715–723 (2019)
S.Y. Lou, Residual symmetries and Bäcklund transformations. arXiv:1308.1140v1
X.N. Gao, S.Y. Lou, X.Y. Tang, Bosonization, singularity analysis, nonlocal symmetry reductions and exact solutions of supersymmetric KdV equation. J. High Energy Phys. 05, 029 (2013)
B. Ren, Interaction solutions for mKP equation with nonlocal symmetry reductions and CTE method. Phys. Scr. 90, 065206 (2015)
W.G. Cheng, B. Li, Y. Chen, Nonlocal symmetry and exact solutions of the (2+1)-dimensional breaking soliton equation. Commun. Nonlinear Sci. Numer. Simul. 29, 198–207 (2015)
B. Ren, Symmetry reduction related with nonlocal symmetry for Gardner equation. Commun. Nonlinear Sci. Numer. Simulat. 42, 456–463 (2017)
X.Z. Liu, J. Yu, Z.M. Lou, New interaction solutions from residual symmetry reduction and consistent Riccati expansion of the (2+1)-dimensional Boussinesq equation. Nonlinear Dyn. 92, 1469–1479 (2018)
X.P. Cheng, Y.Q. Yang, B. Ren, J.Y. Wang, Interaction behavior between solitons and (2+1)-dimensional CDGKS waves. Wave Motion 86, 150–161 (2019)
J.C. Chen, S.D. Zhu, Residual symmetries and soliton-cnoidal wave interaction solutions for the negative-order Korteweg–de Vries equation. Appl. Math. Lett. 73, 136–142 (2017)
J.F. Song, Y.H. Hu, Z.Y. Ma, Bäcklund transformation and CRE solvability for the negative-order modified KdV equation. Nonlinear Dyn. 90, 575–580 (2017)
J.C. Chen, H.L. Wu, Q.Y. Zhu, Bäcklund transformation and soliton–cnoidal wave interaction solution for the coupled Klein–Gordon equations. Nonlinear Dyn. 91, 1949–1961 (2018)
X.Z. Liu, J. Yu, Z.M. Lou, New Bäcklund transformations of the (2+1)-dimensional Bogoyavlenskii equation via localization of residual symmetries. Comput. Math. Appl. 76, 1669–1679 (2018)
Z.L. Zhao, B. Han, Residual symmetry, Bäcklund transformation and CRE solvability of a (2+1)-dimensional nonlinear system. Nonlinear Dyn. 94, 461–474 (2018)
W.G. Cheng, T.Z. Xu, \(N\)-th Bäcklund transformation and soliton-cnoidal wave interaction solution to the combined KdV-negative-order KdV equation. Appl. Math. Lett. 94, 21–29 (2019)
S.Y. Lou, Consistent Riccati expansion for integrable systems. Stud. Appl. Math. 134, 372–402 (2015)
X.R. Hu, Y.Q. Li, Nonlocal symmetry and soliton-cnoidal wave solutions of the Bogoyavlenskii coupled KdV system. Appl. Math. Lett. 51, 20–26 (2016)
L.L. Huang, Y. Chen, Z.Y. Ma, Nonlocal symmetry and interaction solutions of a generalized Kadomtsev–Petviashvili equation. Commun. Theor. Phys. 66, 189–195 (2016)
J.C. Chen, Z.Y. Ma, Consistent Riccati expansion solvability and soliton–cnoidal wave interaction solution of a (2+1)-dimensional Korteweg–de Vries equation. Appl. Math. Lett. 64, 87–93 (2017)
H. Wang, Y.H. Wang, CRE solvability and soliton–cnoidal wave interaction solutions of the dissipative (2+1)-dimensional AKNS equation. Appl. Math. Lett. 69, 161–167 (2017)
Y.H. Wang, H. Wang, Nonlocal symmetry, CRE solvability and soliton-cnoidal solutions of the (2+1)-dimensional modified KdV-Calogero–Bogoyavlenkskii–Schiff equation. Nonlinear Dyn. 89, 235–241 (2017)
H. Wang, Y.H. Wang, H.H. Dong, Interaction solutions of a (2+1)-dimensional dispersive long wave system. Comput. Math. Appl. 75, 2625–2628 (2018)
X.Z. Liu, J. Yu, Z.M. Lou, Residual symmetry, CRE integrability and interaction solutions of the (3+1)-dimensional breaking soliton equation. Phys. Scr. 93, 085201 (2018)
M.J. Dong, S.F. Tian, X.W. Yan, T.T. Zhang, Nonlocal symmetries, conservation laws and interaction solutions for the classical Boussinesq–Burgers equation. Nonlinear Dyn. 95, 273–291 (2019)
H.C. Kim, R.L. Stenzel, A.Y. Wong, Development of “cavitons” and trapping of rf field. Phys. Rev. Lett. 33, 886–889 (1974)
P. Deeskow, H. Schamel, N.N. Rao, M.Y. Yu, R.K. Varma, P.K. Shukla, Dressed Langmuir solitons. Phys. Fluids 30, 2703–2707 (1987)
A.J. Keane, A. Mushtaq, M.S. Wheatland, Alfvén solitons in a Fermionic quantum plasma. Phys. Rev. E 83, 066407 (2011)
J.Y. Wang, X.P. Cheng, X.Y. Tang, J.R. Yang, B. Ren, Oblique propagation of ion acoustic soliton–cnoidal waves in a magnetized electron-positron-ion plasma with superthermal electrons. Phys. Plasmas 21, 032111 (2014)
B. Fuchssteiner, Some tricks from the symmetry-toolbox for nonlinear equations: generalizations of the Camassa–Holm equation. Physics D 95, 229–243 (1996)
A.N.W. Hone, J.P. Wang, Prolongation algebras and Hamiltonian operators for peakon equations. Inverse Probl. 19, 129–145 (2003)
A.N.W. Hone, J.P. Wang, Integrable peakon equations with cubic nonlinearity. J. Phys. A Math. Theor. 41, 372002 (2008)
Acknowledgements
This work is supported by the Scientific Research Foundation of Educational Committee of Yunnan Province (no. 2019J0735), and the Construction Plan of Key Laboratory of Institutions of Higher Education of Yunnan Province. D.Q. Qiu acknowledges sincerely Prof. Q.P. Liu for many useful discussions.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
This project was supported by the Scientific Research Foundation of Educational Committee of Yunnan Province (no. 2019J0735), and the Construction Plan of Key Laboratory of Institutions of Higher Education of Yunnan Province.
Rights and permissions
About this article

Cite this article
Cheng, W., Qiu, D. & Xu, T. Multiple residual symmetries and soliton-cnoidal wave interaction solution of the \((2+1)\)-dimensional negative-order modified Calogero–Bogoyavlenskii–Schiff equation. Eur. Phys. J. Plus 135, 15 (2020). https://doi.org/10.1140/epjp/s13360-019-00035-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-019-00035-w