
Abstract
In this paper, the (2 \(+\) 1)-dimensional Boussinesq equation is studied by applying residual symmetry reduction method and consistent Riccati expansion (CRE) method, respectively. By introducing multiple new dependent variables to enlarge the (2 \(+\) 1)-dimensional Boussinesq system, the residual symmetry is localized and the corresponding finite transformation is obtained by using Lie’s first theorem. The symmetry reduction solutions related to the residual symmetry of the (2 \(+\) 1)-dimensional Boussinesq equation is obtained by using the standard Lie symmetry method, which includes complicated interaction models. Furthermore, the (2 \(+\) 1)-dimensional Boussinesq equation is found to have CRE integrability, and new Bäcklund transformations (BTs) are consequently obtained. New interaction solutions are obtained from these BTs; particularly, the interaction solution between soliton and background cnoidal wave is given and analyzed explicitly.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In real nature, there exist many phenomena that can be properly described by solitons interacted with background nonlinear waves [1,2,3]. For integrable systems, many effective and reliable methods have been developed, such as the Hirota’s bilinear method [4], the Bäcklund transformation (BT) and Darboux transformation (DT) method [5, 6], etc., to derive soliton solutions. However, the interaction solutions of solitons interacted with various nonlinear waves such as cnoidal waves are usually very difficult to be obtained by these traditional methods [7, 8].
As we know, symmetry analysis [9, 10] plays an important role in solving nonlinear problems. Using classical and nonclassical Lie group theory, one can construct abundant reduction solutions of nonlinear differential equations. Nevertheless, these symmetry methods are based on Lie point symmetry group of related equations. Recently, for nonlocal symmetries of some integrable system, Lou found an effective way to localize them into Lie point symmetries by introducing new variables to enlarge the original system. On this basis, various interesting interaction solutions were constructed by using standard Lie symmetry reduction method [11, 12]. Traditionally, nonlocal symmetries of nonlinear systems can be obtained through potential symmetries [13], Lax pair, DT and BT [14], etc. Interestingly, for many Painlevé integrable systems, the residue of truncated Painlevé expansion with respect to singular manifold is actually a nonlocal symmetry, and many interesting interaction solutions were obtained by applying the localization procedure to various nonlinear systems [11, 15]. Furthermore, the truncated Painlevé expansion is extended to consistent Riccati expansion (CRE) by Lou and defined a new integrability of owning CRE property for many nonlinear systems [16,17,18]. More importantly, for CRE integrable systems, solutions of solitons interacted with nonlinear solitary waves can be easily obtained through Riccati expansion [19].
In this paper, we will discuss the (2 \(+\) 1)-dimensional generalization of Boussinesq equation in the form
by using residual symmetry reduction method and CRE method, respectively. The (2 \(+\) 1)-dimensional Boussinesq equation has important applications in describing the propagation of gravity waves on the surface of water. As for the exact solutions of the (2 \(+\) 1)-dimensional Boussinesq equation, Johnson obtained some different types of solitary-wave solutions by using the Hirota bilinear method [20]; Senthilvelan [21] used the homogeneous balance method to obtain the traveling wave solutions and explored certain new solutions; Chen et al. [22] investigated this equation by using the Riccati equation expansion method and obtained many types of wave solutions.
This paper is organized as follows: In Sect. 2, the residual symmetry of Eq. (1) is obtained from the truncated Painlevé expansion and localized into a Lie point symmetry in a new enlarged system, and then, a new BT is found by solving the corresponding initial value problem. In Sect. 3, the general form of Lie point symmetry group and related symmetry reduction solutions are obtained by applying classical Lie symmetry method to the enlarged (2 \(+\) 1)-dimensional Boussinesq system, from which the interaction solutions are explicitly given for Eq. (1). In Sect. 4, the (2 \(+\) 1)-dimensional Boussinesq equation is found to have CRE integrability property and new BTs of this equation are given through CRE and CTE (consistent tanh expansion) methods. From these BTs, new interaction solutions between solitons and cnoidal waves are explicitly given. The last section contains a discussion and summary.
2 Residual symmetry and related Bäcklund transformation
The truncated Painlevé expansion of the (2 \(+\) 1)-dimensional Boussinesq equation (1) can be easily given by Painlevé analysis, i.e.,
with \(\phi \) being the singular manifold and \(u_0, u_1, u_2\) being functions of \(x, \,y,\, t\). Substituting (2) into (1) and vanishing the coefficients of all different powers of \(\frac{1}{\phi }\), omitting the details of calculation, we obtain
and the Schwarzian form of Eq. (1)
where \(K=\frac{\phi _{xxx}}{\phi _x}-\frac{3}{2}\frac{\phi _{xx}^2}{\phi _x^2}\), \(C=\frac{\phi _t}{\phi _x}\) and \(P=\frac{\phi _y}{\phi _x}\) are Schwarzian variables. It is obviously that Eq. (5) is invariant under the Möbius transformation
or in other words, Eq. (5) possesses three symmetries \(\sigma _{\phi }=d_1\), \(\sigma _{\phi }=d_2\phi \) and
with arbitrary constants \(d_1,\,d_2\) and \(d_3.\)
Hereby, by substituting (3) and (4) into (2), the following BT is obtained.
Theorem 1
If \(\phi \) is a solution of the Schwartzian equation (5), then
is a solution u of (1).
The interesting fact is that the residue \(u_1\) of expansion (2) expressed by the singular manifold \(\phi \) in Eq. (3) is a nonlocal symmetry of (1), which can be verified by substituting it into the linearized form of Eq. (1)
with the BT (8). Apparently, the residual symmetry \(\sigma _u=u_1\) generates the finite transformation (2), and it is related to the symmetry of (7) through the linearized equation of (4).
For nonlocal symmetry, the corresponding finite transformation is hardly to be obtained by using Lie’s first theorem. To overcome this difficulty, the practical way is to localize the residual symmetry
into a Lie point symmetry in an enlarged system by introducing the following four dependent variables
To find the symmetries of the enlarged system, we have to solve the linearized equations of (1), (5), (11) and (12), i.e.,
By the known solution (10), the solutions of (13) can be easily obtained as
if \(d_3=-\frac{1}{6}\) and \(d_1=d_2=0\) is fixed for \(\sigma _{\phi }\). In other words, the residual symmetry (10) is localized to a Lie point symmetry in the enlarged systems (1), (5), (11) and (12) with the symmetry vector
Equivalently, the generator of the BT (2) is just a special Lie point symmetry of the enlarged system.
By using Lie’s first theorem, the corresponding finite transformation of symmetry (14) can be obtained by solving the following initial value problem
Solving out these equations leads to the following BT of the enlarged system, which is stated in the following theorem.
Theorem 2
If \(\{u,g,m,n,h,\phi \}\) is a solution of the enlarged system (1), (5), (11) and (12), then \(\{\hat{u},\hat{g},\hat{m},\hat{n},\hat{h},\hat{\phi }\}\) with
is also a solution of the system with \(\epsilon \) being an arbitrary group parameter.
3 New symmetry reduction solutions
To seek the symmetry reduction solutions of the (2 \(+\) 1)-dimensional Boussinesq equation related to the residual symmetry, we first investigate Lie point symmetry of the enlarged system in the form
In other words, the enlarged systems (1), (5), (11) and (12) are invariant under the transformation
with the infinitesimal parameter \(\epsilon \). Equivalently, the symmetry in form (23) can be written as a function form as
Substituting (25) into (13) and vanishing all the coefficients of the independent partial derivatives of variables u, g, m, n, h and \(\phi \), a system of overdetermined linear equations for \(X, Y, T, U, G, M, N, H, \Phi \) are obtained. Calculated by computer, the desired solutions are
with \(c_1, c_2, c_3, c_4, c_5, c_6, c_7\) being arbitrary constants. It is interesting that the symmetry of (15) is just a special form of (26) by setting \(c_1=c_2=c_3=c_4=c_6=c_7=0\) and \(c_5=1\).
Substituting (26) into (25), one obtains
The group invariant solutions of the enlarged system can be obtained by solving (27) under the symmetry constraints \(\sigma _u=\sigma _g=\sigma _m=\sigma _n=\sigma _h=\sigma _{\phi }=0\), alternatively, solving the corresponding characteristic equation
Two subcases of symmetry reductions, without loss of generality, are considered in the following.
Case 1 \(c_6=0\) and \(c_i\ne 0\) \((i=1,\,2,\,3,\,4,\,5,\,7)\).
In this case, by solving Eq. (28), the symmetry reduction solutions of the enlarged (2 \(+\) 1)-dimensional Boussinesq system are
where \(U,\, G,\,M,\,N,\, H\) and \(\Phi \) are invariant functions of \(\xi =\frac{c_1x+2c_4}{c_1\sqrt{c_1t+c_2}}\) and \(\eta =\frac{c_1y+c_3}{c_1(c_1t+c_2)}\).
Substituting Eqs.(29)–(34) into the enlarged systems (1), (5), (11), and (12) yields
where \(\Phi \) satisfies the following reduction equation
It is natural that once \(\Phi \) is solved out from (40), the explicit solutions of the (2 \(+\) 1)-dimensional Boussinesq equation (1) would be immediately obtained by substituting \(U,\,H,\,G\) and \(\Phi \) into Eq. (34) with Eqs. (35), (38) and (39).
Case 2 \(c_i\ne 0\) \((\hbox {i}=2,\,3,\,4,\,5,\,6,\,7)\) and \(c_1=0\).
In this case, the group invariant solutions of the enlarged system can be obtained with the same logic of case 1, which read
where \(u', g',m',n', h', \phi '\) are invariant functions of variables \(x'=\frac{c_2x-c_4t}{c_2}\) and \(y'=\frac{c_2y-c_3t}{c_2}\).
Substituting Eqs. (41), (44), (45) and (46) into the enlarged (2 \(+\) 1)-dimensional Boussinesq system (1), (5), (11) and (12) yields
where \(\phi '\) satisfies the following reduction equation
Similarly to case 1, when \(\phi '\) is solved out by Eq. (52), the solutions of the (2 \(+\) 1)-dimensional Boussinesq equation can be obtained by substituting it into (46) with Eqs. (47), (50) and (51).
From the symmetry reduction Eqs. (40) and (52), one can obtain various nonlinear wave solutions, so the exact solutions of the (2 \(+\) 1)-dimensional Boussinesq equation given by Eqs. (34) and (46) represent the complicated interaction solutions between solitons and background nonlinear waves.
To give out a concrete example, we consider the special solution of Eq. (52) in the form
with arbitrary constants \(k_1',\, l_1',\, c',\, l_2',\, k_2',\, M',\, N'\). Here, \(E_{\pi }\) is the third type of incomplete elliptic integral, while \(sn(l_2'\eta +k_2'\xi , N')\) is a Jacobi elliptic function. Now substitute Eq. (53) into Eq. (52) and vanish different powers of \(sn(l_2'\eta +k_2'\xi , N')\), we get the following conditions
and
Substituting Eq. (53) into Eq. (46) with Eqs. (47), (50) and (51) under conditions (54), (55), (56), we get a special interaction solution between solitons and Jacobi elliptic waves.
4 CRE integrability and new interaction solutions
In this section, we further explore the consistent Riccati expansion (CRE) integrability of the (2 \(+\) 1)-dimensional Boussinesq equation (1). By leading order analysis, the Riccati expansion solution is
where \(v_0, v_1, v_2\) are functions of (x, y, t) to be determined later and R(w) satisfies the Riccati equation
Substituting Eq. (57) with Eq. (58) into Eq. (1) and vanishing all the coefficients of different powers of R(w), we get
leaving four equations for only one dependent variable w. Fortunately, it can be verified that these equations are consistent with each other and the (2 \(+\) 1)-dimensional Boussinesq equation is CRE integrable in this sense [16]. Thus, we obtain the final equation for w
with \(K'=\frac{w_{xxx}}{w_x}-\frac{3}{2}\frac{w_{xx}^2}{w_x^2}\), \(C'=\frac{w_t}{w_x}\) and \(P'=\frac{w_y}{w_x}\).
From the property that these equations derived by vanishing different powers of R(w) in the expansion are consistent with each other, we conclude that the (2 \(+\) 1)-dimensional Boussinesq equation (1) really has CRE integrability and expansion (57) is a CRE expansion. Naturally, the following theorem is ready:
Theorem 3
If w is a solution of
then
is a solution of Eq.(1) where \(R=R(w)\) is an arbitrary solution of the Riccati equation (58).
When the Riccati equation (58) takes the special solution \(R = \tanh (w)\), the Riccati expansion (57) becomes
It is natural that any CRE integrable system must also be CTE (consistent tanh expansion) integrable. By using the tanh expansion (64) of the (2 \(+\) 1)-dimensional Boussinesq equation, one could obtain some important explicit solutions, especially the interactions solutions between soliton and nonlinear periodic waves. To this end, we first provide the following nonauto BT.
Theorem 4
If w satisfies the following equation
then
is a solution of Eq. (1).
To give out some solutions explicitly, we change w to the form
with arbitrary constants \(k_1,\,l_1,\,\omega _1\) and arbitrary function g. By using Theorem 4, we could obtain nontrivial solutions of the (2 \(+\) 1)-dimensional Boussinesq equation from trivial solutions of (65) with Eq. (67). In the following, we give some concrete examples.
Case 1 In Eq. (65), we take a trivial seed solution
with \(k,\,l,\,\omega ,\, d\) being arbitrary constants. By substituting Eq. (68) into Theorem 4, we have the following exact solution for the (2 \(+\) 1)-dimensional Boussinesq equation (1)
Case 2 We consider a special solution of (65) in the form
with arbitrary constants \(k_1,\, l_1, \, \omega _1,\, k_2,\, l_2,\, \omega _2.\) Substituting (70) into (65), we find that \(W_1(X)\equiv W(X)_X\) satisfies the following elliptic function equation:
with
and arbitrary constants \(C_1\) and \(C_2\). Then the solution of the (2 \(+\) 1)-dimensional Boussinesq equation has the form
From the form of (73), it is obvious that this solution describes solitons interacted with periodic waves which can be derived from (71). To illustrate this concretely, we consider the cnoidal solution of (71) as
with arbitrary constants \(\mu _0,\,\mu _1,\,M''\) and \(N''\). Substituting Eq. (74) with Eq. (72) into Eq. (71) and setting the coefficients of different powers of \(sn(M''X,N'')\) to zero, we get
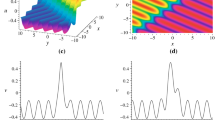
Figures 1, 2 and 3 display the interesting interaction structure between solitons and cnoidal periodic waves in different dimensions. It is shown from Figs. 1b and 3b that a solitary wave propagates on a cnoidal background wave, while Fig. 2b indicates that this interaction is elastic with nonzero phase shifts. For Figs. 1a, c, 2a, c, and 3a, c, respectively, we can give similar conclusions. In consideration of plentiful interacting processes between solitary waves and periodic waves in nature, these interaction solutions can be used to explain related phenomenons.

The soliton–cnoidal wave interaction solution of the (2 \(+\) 1)-dimensional Boussinesq equation given by (73) with (74). The parameters are fixed as \(M'' = 1, N'' = \frac{1}{2}, k_2 = 1, k_1 = \frac{1}{4}, l_1 = 1, l_2 = 1, \mu _0 = \frac{1}{6}, C_1 =\frac{37}{108}, C_2 = -\frac{7}{12}, \omega _2 = \frac{349}{10332}\sqrt{861}, \omega _1 = \frac{499}{13776}\sqrt{861}, C_0 =\frac{5}{162}, C_3 = -\frac{8}{3}, \mu _1 =\frac{1}{4}\): a \(\hbox {t}=0\); b \(\hbox {x}=0\); c \(\hbox {y}=0\)

The density plot of interaction solution which is given the same as in Fig. 1 as well as the same parameters fixed: a \(\hbox {t}=0\); b \(\hbox {y}=0\); c \(\hbox {x}=0\)

The soliton–cnoidal wave interaction solution which is given the same as in Fig. 1 as well as the same parameters fixed: a \(\hbox {y}=0\), \(\hbox {t}=0\); b \(x=0\), \(\hbox {t}=0\); c \(\hbox {x}=0\), \(\hbox {y}=0\)
5 Conclusion and discussion
In summary, the (2 \(+\) 1)-dimensional Boussinesq equation is studied by using residual symmetry reduction method and CRE method, respectively. By applying localization procedure, the residual symmetry is transformed into a Lie point symmetry in a new enlarged system and then the corresponding finite transformation is obtained by solving initial value problem. New interaction solutions of the (2 \(+\) 1)-dimensional Boussinesq equation are obtained by using standard Lie symmetry method, and a concrete example is displayed. Furthermore, the (2 \(+\) 1)-dimensional Boussinesq equation is found to have CRE integrability, and some new BTs are given from this property, from which new interaction solutions are constructed. The concrete interaction solution between soliton and cnoidal waves is explicitly given.
There exist some other methods to investigate interaction solutions between solitons and nonlinear waves. For example, in Ref. [7], by using double commutation method and the inverse scattering transform, the authors investigated soliton solutions of the Toda hierarchy on a quasi-periodic finite-gap background; in Ref. [8], for Sine–Gordon equation, the solitons moving on a cnoidal wave background are obtained by using Darboux transformation method. Compared to these traditional methods, the nonlocal symmetry reduction method and CRE method applied here are more easier to be carried out for more integrable nonlinear systems. Moreover, from different periodic wave solutions of symmetry reduction equations [see, e.g., Eqs. (40), (52)] or CRE Eq. (65), we could easily construct more abundant types of interaction solutions, which could be used to explain related phenomena in nature.
Compared with each other the two kinds of interaction solutions which are derived from symmetry reduction method and CRE method, it is obvious that the former one is more complicated. It needs to investigate the detailed relation between these methods in analyzing relevant physical phenomena in the future.
References
Fleischer, J.W., Segev, M., Efremidis, N.K., Christodoulides, D.N.: Observation of two-dimensional discrete solitons in optically induced nonlinear photonic lattices. Nature 422, 147 (2003)
Dai, C.Q., Xu, Y.J.: Spatial bright and dark similaritons on cnoidal wave backgrounds in 2D waveguides with different distributed transverse diffractions. Opt. Commun. 311, 216 (2013)
Pelka, J., Zagrodziński, J.: Effective velocity of soliton in the presence of a periodic background. Acta Phys. Polon. A 100, 871 (2001)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Fuchssteiner, B., Fokas, A.S.: Symplectic structures, their Bäcklund transformations and hereditary symmetries. Phys. D Nonlinear Phenom. 4, 47 (1981)
Li, Y.S., Ma, W.X., Zhang, J.E.: Darboux transformations of classical Boussinesq system and its new solutions. Phys. Lett. A 275, 60 (2000)
Egorowa, I., Michor, J., Teschl, G.: Soliton solutions of the Toda hierarchy on quasi-periodic background revisited. Math. Nachr. 282, 526 (2009)
Shin, H.J.: Multisoliton complexes moving on a cnoidal wave background. Phys. Rev. E 71, 036628 (2005)
Olver, P.J.: Applications of Lie Groups to Differential Equations. Springer, NewYork (1993)
Ovsiannikov, L.V.: Group Analysis of Differential Equations. Academic Press, New York (1982)
Hu, X.R., Lou, S.Y., Chen, Y.: Explicit solutions from eigenfunction symmetry of the Korteweg-de Vries equation. Phys. Rev. E 85, 056607 (2012)
Gao, X.N., Lou, S.Y., Tang, X.Y.: Bosonization, singularity analysis, nonlocal symmetry reductions and exact solutions of supersymmetric KdV equation. J. High Energy Phys. 05, 29 (2013)
Bluman, G.W., Cheviakov, A.F., Anco, S.C.: Applications of Symmetry Methods to Partial Differential Equations. Springer, New York (2010)
Lou, S.Y., Hu, X.B.: Non-local symmetries via Darboux transformations. J. Phys. A Math. Gen. 30, L95 (1997)
Lou, S.Y.: Residual symmetries and Bäcklund transformations. arXiv:1308.1140v1 (2013)
Lou, S.Y.: Consistent Riccati expansion for integrable systems. Stud. Appl. Math. 134(3), 372 (2015)
Lou, S.Y., Cheng, X.P., Tang, X.Y.: Dressed dark solitons of the defocusing nonlinear Schrödinger equation. Chin. Phys. Lett. 31, 070201 (2014)
Ren, B., Cheng, X.P., Lin, J.: The (2 + 1)-dimensional Konopelchenko–Dubrovsky equation: nonlocal symmetries and interaction solutions. Nonlinear Dyn. 86, 1855 (2016)
Wang, Y.H., Wang, H.: Nonlocal symmetry, CRE solvability and soliton-cnoidal solutions of the (2 + 1)-dimensional modified KdV-Calogero–Bogoyavlenkskii–Schiff equation. Nonlinear Dyn. 89, 235 (2017)
Johnson, R.S.: A two-dimensional Boussinesq equation for water waves and some of its solutions. J. Fluid Mech. 323, 65 (2006)
Senthilvelan, M.: On the extended applications of homogenous balance method. Appl. Math. Comput. 123, 381 (2001)
Chen, Y., Yan, Z., Zhang, H.: New explicit solitary wave solutions for (2+1)-dimensional Boussinesq equation and (3 + 1)-dimensional KP equation. Phys. Lett. A 307, 107 (2003)
Acknowledgements
The authors are grateful to the referee, whose suggestions for the paper have led to a substantial clarification of our work. This work was supported by the National Natural Science Foundation of China under Grant Nos. 11405110, 11275129, 11472177 and the Natural Science Foundation of Zhejiang Province of China under Grant No. LY18A050001.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest to this work. There is no professional or other personal interest of any nature or kind in any product that could be construed as influencing the position presented in the manuscript entitled.
Rights and permissions
About this article

Cite this article
Liu, Xz., Yu, J. & Lou, ZM. New interaction solutions from residual symmetry reduction and consistent Riccati expansion of the (2 \(\varvec{+}\) 1)-dimensional Boussinesq equation. Nonlinear Dyn 92, 1469–1479 (2018). https://doi.org/10.1007/s11071-018-4139-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4139-8