
Abstract
This paper addresses a control problem of a nonlinear cantilever beam with translating base in the three-dimensional space, wherein the coupled nonlinear dynamics of the transverse, lateral, and longitudinal vibrations of the beam and the base’s motions are considered. The control scheme employs two control inputs applied to the beam’s base to control the base’s position while simultaneously suppressing the beam’s transverse, lateral, and longitudinal vibrations. According to the Hamilton principle, a hybrid model describing the nonlinear coupling dynamics of the beam and the base is established: This model consists of three partial differential equations representing the beam’s dynamics and two ordinary differential equations representing the base’s dynamics. Subsequently, the control laws are designed to move the base to the desired position and attenuate the beam’s vibrations in all three directions. The asymptotic stability of the closed-loop system is proven via the Lyapunov method. Finally, the effectiveness of the designed control scheme is illustrated via the simulation results.
Similar content being viewed by others

Introduction
The systems consisting of an elastic cantilever beam fixed on a translating base are found in various practical engineering applications, such as master fuel assemblies in nuclear refueling machines, robotic manipulators1, and micro-electro-mechanical systems2,3,4. In these systems, the base’s translational motion can produce large-amplitude vibrations of the beam in the three-dimensional (3D) space. This vibration becomes a significant negative factor in association with the system’s safety and performance. Therefore, it is necessary to analyze and control the 3D vibration of the beam, operated by a moving base, to ensure safety and performance.
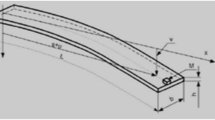
The flexible cantilever beam is a distributed parameter system with an infinite number of vibration modes. Its dynamics are characterized by partial differential equations (PDEs)5,6,7,8. When a flexible beam is fixed on a translating base, the base’s dynamics (as a lumped parameter system) are described by ordinary differential equations (ODEs) to be considered simultaneously with the beam’s dynamics. Furthermore, if the amplitudes of the beam’s vibrations are large, 3D analysis of the beam’s dynamics should be performed; wherein the nonlinear coupling effects between the transverse, lateral, and longitudinal vibrations are considered, see Fig. 1.

An example of nonlinear cantilever beams operating in the 3D space: (a) Gantry robot. (www.a-m-c.com/servo-drives-for-gantry-systems), (b) the defined coordinate system and motions.
The dynamic behaviors of the beam attached to a moving base have been studied in the literature9,10,11,12. Park et al. developed an equation of motion of the mass-beam-cart system, which is a beam with translating base, based on the Hamilton principle13. The system’s natural frequencies were also obtained by using modal analysis. Later, the vibration of a flexible beam fixed on a cart and carrying a moving mass was examined via an experimental study14. However, most researches on the beam attached to a translating base assume that the base moves along one direction, restricting the beam’s vibration to a two-dimensional space. In these works, only the transverse vibration was considered. For the beam with a translating base in the 3D space, Shah and Hong addressed the vibration problem of the master fuel assembly in nuclear refueling machines15. In their work, the nuclear fuel rod and the trolley, respectively, were treated as a flexible beam and a carrying base moving on the horizontal plane.
The control problem of distributed parameter systems, whose dynamics is described by PDEs, has been investigated in the literature16,17,18,19,20,21. Boundary control technique, wherein the control input is exerted to the PDE through its boundary conditions22,23,24,25, is a powerful tool for handling these systems. Contrary to the stationary beam, the vibration of the cantilever beam with a moving base can be suppressed via the control input applied at the base (i.e., the clamped end of the beam) or the beam’s tip. In this situation, we aim to simultaneously control of the base’s position and the beam’s vibration. These objectives can be achieved by either open-loop control26,27 or closed-loop control15,28,29,30,31,32,33: The input shaping control is the most feasible and practical open-loop control technique for beams with a moving base. In a study published by Shah et al.26, model parameters of an underwater system consisting of a beam and a translating base were determined using the model analysis method. Accordingly, the input shaping control law was designed to position the base and suppress the beam’s vibration. Pham et al.27 used the model parameters obtained through an experiment to design the input shaping control law for a non-uniform beam with a moving base. For the closed-loop control technique, Liu and Chao presented an experimental study on implementing the neuro-fuzzy approach to control a beam-cart system28. In their work, the piezoelectric transducers located at the beam’s tip were used to suppress the transverse vibration. Another closed-loop control of an Euler–Bernoulli beam with a translating base was done by Shah and Hong15, whereas the control of a Timoshenko beam attached to a moving base was presented by Pham et al.34.
Most studies on controlling the flexible beam attached to a translating base considered only the linear vibrations15,26,27,28. Under the assumption of small-amplitude vibration, the dynamic tension was ignored. However, in the case of large-amplitude vibrations, the negligence of the dynamic tension (which makes the beam’s dynamics nonlinear) can affect the system’s performance and stability. Also, the existing studies assumed that the beam’s vibration occurred in a plane. Thus, only the transverse or lateral vibrations were considered. Even though Shah and Hong15 investigate both the transverse and lateral vibrations of an Euler–Bernoulli beam, they ignored the coupled dynamics of the transverse and lateral vibrations; that is, the transverse vibration does not affect the time-evolution of the lateral vibration and vice versa.
Recently, the 3D vibration analysis of a beam has received significant attention35,36,37,38,39,40. Do and Pan38 and Do39 used the Euler–Bernoulli beam model with large-amplitude vibrations to model a flexible riser. The authors obtained a model describing the system’s transverse, lateral, and longitudinal vibrations. He et al.41, Ji and Liu42,43, and Liu et al.44 investigated the coupled dynamics of a 3D cantilever beam with a tip payload described by a set of PDEs and ODEs. Also, control problems of 3D beams, wherein the coupled dynamics of nonlinear vibrations, were investigated in the literature. However, these studies have either dealt with a beam attached to a stationary base or proposed control strategies wherein control forces/torques were applied to the beam’s tip. The implementation of control actions at the tip is not feasible or practical, see Fig. 1. It might be possible to put an actuator at the tip of a large cantilever beam of a space structure or a riser system. But, for gantry manipulators, surgeon robots, and flexible liquid handling robots, implementing the control forces/torques in the tip is not possible because the tip has to interact with an object or the environment.
The published papers in the literature on controlling cantilever-beam vibrations are restricted to: (i) The cases where the cantilever is affixed on a stationary base, and the free end has 3D motions41,42,43,44; and (ii) the beam is attached to a translating base, but the considered dynamics are linear by ignoring the coupled dynamics between the transversal and lateral vibrations of the beam15,26,27,28. Thus, the control problem of a nonlinear cantilever beam operating in the 3D space without using control input at the tip has not been solved yet.
In this paper, the beam’s longitudinal vibration and axial deformation (which makes the beam’s dynamics nonlinear) are further considered. In such cases of large-amplitude vibrations, the omission of longitudinal vibration and axial deformation can affect the system’s performance and lead to an erroneous result. Henthforth, the control problem of the nonlinear 3D vibrations of a beam affixed on a translating base without any additional actuators is addressed for the first time. The considered system is represented as a gantry robot consisting of the gantry, trolley, and flexible robotic arm depicted in Fig. 1. In the gantry robot, the gantry moves along the k-axis, whereas the trolley moves along the j-axis. A flexible robotic arm with a constant length is fixed to the trolley. The Hamilton principle is used to develop a novel hybrid model describing the nonlinear coupling dynamics of the robotic arm’s transverse, lateral, and longitudinal vibrations, and the rigid body motions of the gantry and trolley. Employing the Lyapunov method, boundary control laws are developed for simultaneous control of the trolley’s position, the gantry’s position, and the robotic arm’s 3D vibrations. The asymptotic stability of the closed-loop system is verified. Finally, the simulation results are provided.
The main contributions of this paper are summarized as follows: (i) A novel dynamic model of a flexible beam attached to a translating base, wherein the coupled dynamics of the nonlinear transverse, lateral, and longitudinal vibrations and the base’s motions are developed for the first time. (ii) A boundary control strategy using the control forces at the base for simultaneous position control and vibration suppression is designed. (iii) The asymptotic stability of the closed-loop system is proven by using the Lyapunov method, and simulation results are provided.
Problem formulation
In Fig. 1, a flexible robotic arm is modeled as a uniform Euler–Bernoulli beam of length l. The motions of the gantry and trolley are generated by two control forces fz and fy, respectively. The positions of the trolley and gantry are denoted by y(t) and z(t), respectively. The beam’s vibrations in the i, j, and k axes are defined as the longitudinal vibration u(x, t), the transverse vibration w(x, t), and the lateral vibration v(x, t), respectively. In this study, the subscripts x and t, i.e., (·)x and (·)t, are the partial derivatives with respect to x and t, respectively, whereas \(\dot{y}\) and \(\dot{z}\) denotes the total derivative of y(t) and z(t) in t, respectively. The kinetic energy of the entire gantry, trolley, and beam system is given as follows:
where ρ and A are the beam’s mass density and cross-sectional area; m1 and m2 are the gantry’s mass and trolley’s mass, respectively. The potential energy due to the axial force, the axial deformation, and the bending moment is given as follows:
where \(P(x) = \rho A(l - x)g\) is the axial force generated by the influence of the gravitational acceleration on the beam’s elements45,46, E denotes Young’s modulus, and Iy and Iz indicate the moments of inertia of the beam. The axial strain \(\varepsilon (x,t)\) is given by the following approximation47:
The virtual work done on the system by the boundary control inputs and the friction is given as follows.
where cw, cu, and cv are the structral damping coefficients (i.e., the subscripts w, u, and v stand for transverse, longitudinal, and lateral, respectively). According to Hamilton’s principle, the dynamic model of the considered system and the corresponding boundary conditions are obtained as follows.
The dynamics of the considered system are represented by the nonlinear PDE-ODE model in (5)–(12): Eqs. (5)–(10) are PDEs describing the transverse, longitudinal, and lateral vibrations of the robotic arm, respectively, whereas the ODEs in (11) and (12) represent the dynamics of the gantry and the trolley, respectively. Observably, the beam’s motion affects the gantry and trolley’s motions and vice versa. Additionally, if the potential energy caused by the axial deformation is ignored (i.e., \(\varepsilon^{2} = (u_{x} + w_{x}^{2} /2 + v_{x}^{2} /2)^{2} \cong 0\)), the nonlinear terms in (5), (7), and (9) vanish. Then, the coupling dynamics between the transverse, lateral, and longitudinal vibrations can be decoupled.
Controller design
The two control objectives are position control and vibration suppression: (i) Move the gantry and trolley carrying the flexible beam to the desired positions, and (ii) suppress the beam’s transverse, lateral, and longitudinal vibrations. In this paper, two forces fz and fy applied to the gantry and trolley are used as the control inputs to achieve the control objectives. The position errors of the trolley and gantry are defined as follows:
where yd and zd are the desired positions of the trolley and gantry, respectively. Based on the Lyapunov direct method, we design fz and fy to guarantee that the convergences of the vibrations, position errors, and velocities of the trolley and gantry to zero are achieved. The following control forces are proposed to stabilize the considered system.
where Ki (i = 1,2,…,6) are the control parameters. The implementation of these control laws requires the measurement of wxxx(0, t) and vxxx(0, t). In practice, these signals can be obtained by using strain gauge sensors attached at the clamped end of the beam.
The following lemmas and assumptions are used for stability analysis of the closed-loop system with the control laws given in (15) and (16).
Lemma 1
48. Let \(\varphi (x,t) \in {\mathbb{R}}\) be a function defined on \(x \in [0,l]\) and \(t \in [0,\infty )\) that satisfies the boundary condition \(\varphi (0,t) = 0, \, \forall t \in [0,\infty )\), the following inequalities hold.
Furthermore, if φ(x, t) satisfies φ(0, t) = φx(0, t) = 0, \(\forall t \in [0,\infty ),\) then the following inequalities hold.
Lemma 2
49. Let \(\varphi_{1} (x,t),\varphi_{2} (x,t) \in {\mathbb{R}}\) be a function defined on \(x \in [0,l]\). Then, the following inequality holds.
Lemma 3
50. If φ(x, t): [0, l] × \({\mathbb{R}}^{ + } \to {\mathbb{R}}\) is uniformly bounded, \(\{ \varphi (x,t)\}_{x \in [0,l]}\) is equicontinuous on t, and \(\mathop {\lim }\limits_{t \to \infty } \int_{0}^{t} {\left\| {\varphi (x,\tau )} \right\|^{2} d\tau }\) exists and is finite, then \(\mathop {\lim }\limits_{t \to \infty } \left\| {\varphi (x,t)} \right\| = 0\).
Assumption 1
21. The transverse vibration w(x, t), the lateral vibration v(x, t), and the longitudinal vibration u(x, t) of a flexible beam satisfy the following inequalities: \(u_{x}^{2} \le w_{x}^{2} /2\) and \(u_{x}^{2} \le v_{x}^{2} /2\). By using Lemma 1, we obtain.
Assumption 2
51. If the potential energy of the system in (2) is bounded for \(\forall t \in [0,\infty )\), then \(w_{xx} (x,t)\), \(w_{xxx} (x,t)\), \(v_{xx} (x,t)\), and \(v_{xxx} (x,t)\) are bounded for \(\forall t \in [0,\infty )\).
Based on the system’s mechanical energy, the following Lyapunov function candidate is introduced:
where
where αi (i = 1, 2, 3) and βj (j = 1, 2, …, 9) are positive coefficients.
Lemma 4
The Lyapunov function candidate in (23) is upper and lower bounded as follows.
where \(\lambda_{1}\) and \(\lambda_{2}\) are positive constants, and
Proof of Lemma 4: See Appendix A.
Lemma 5
Under the control laws (15) and (16), the time derivative of the Lyapunov function candidate in (23) is upper bounded as follows.
where λ is a positive constant.
Proof of Lemma 5: See Appendix B.
Theorem 1.
Consider a hybrid system described by (5)-(12) under control laws (15–16) and Assumptions 1 and 2. Control parameters Ki (i = 1, 2, …, 6) are selected to satisfy the conditions in (A.15)–(A.23), (B.9), (B.17)–(B.22), and (B.25)–(B.35). The asymptotic stability of the closed-loop system in the sense that the transverse vibration w(x, t), lateral vibration v(x, t), longitudinal vibration u(x, t), and position errors (13) and (14) converge to zero is guaranteed. Additionally, the control laws are bounded.
Proof of Theorem: Lemma 4 reveals that the Lyapunov function candidate in (23) is a positive definite. According to Lemma 5, we obtain
We define the norm of a spatiotemporal function as follows: \(\left\| {w(x,t)} \right\| = \left( {\int_{0}^{l} {w^{2} (x,t)dx} } \right)^{1/2}\). Using Lemmas 1 and 4 and Assumption 1, the following inequalities are obtained.
Inequalities (31–37) assure w(x, t), u(x, t), v(x, t), \(e_{y}\), \(\dot{e}_{y}\), \(e_{z}\), and \(\dot{e}_{z}\) are all uniformly bounded. Similarly, we also obtain the boundedness of \(\left\| {w(x,t)} \right\|^{2}\), \(\left\| {w_{t} (x,t)} \right\|^{2}\), \(\left\| {u(x,t)} \right\|^{2}\), \(\left\| {u_{t} (x,t)} \right\|^{2}\), \(\left\| {v(x,t)} \right\|^{2}\), and \(\left\| {v_{t} (x,t)} \right\|^{2}\) based on Lemmas 4 and 5.
Additionally, the following results also imply that w(x, t), u(x, t), and v(x, t) are equicontinuous in t.
Accordingly, we can conclude that \(\mathop {\lim }\limits_{t \to \infty } \left\| {w(x,t)} \right\| = 0,\) \(\mathop {\lim }\limits_{t \to \infty } \left\| {v(x,t)} \right\| = 0\), and \(\mathop {\lim }\limits_{t \to \infty } \left\| {u(x,t)} \right\| = 0\) via Lemma 3.
Furthermore, Lemmas 4 and 5 also imply
Based on Barbalat’s Lemma, we can conclude that \(\mathop {\lim }\limits_{t \to \infty } \left| {e_{y} } \right| = 0\) and \(\mathop {\lim }\limits_{t \to \infty } \left| {e_{z} } \right| = 0\).
Inequality (30) implies the boundedness of V(t). It follows that the potential energy function is also a bounded function. Under Assumption 2, wxx(x, t), wxxx(x, t), vxx(x, t), and vxxx(x, t) are bounded. Inequalities (34)-(37) reveal that \(e_{y}\), \(\dot{e}_{y}\),\(e_{z}\), and \(\dot{e}_{z}\) are also bounded. Finally, we can conclude that the control laws in (15) and (16) are bounded. Theorem 1 is proved.
Simulation results
In this section, numerical simulations are performed to illustrate the effectiveness of the proposed control laws. The system parameters used in the numerical simulation are shown in Table 1. According to these system parameters, the control gains in (15) and (16) are selected as K1 = 750, K2 = 950, K3 = 1.12 × 104, K4 = 550, K5 = 750, and K6 = 2.34 × 104. Control parameters Ki (i = 1, 2,…, 6) are calculated based on design parameters ki, αn, βj, and δk (n = 1, 2, 3; j = 1, 2,…, 7; k = 1, 2,…, 9). These design parameters have been selected to satisfy the conditions in (A.15–A.23), (B.9), (B.17–B.22), and (B.25–B.35). Some parameters, such as δ1, δ2, δ4, and α2, can be pre-determined based on the necessary conditions of (A.15–A.17) and (A.19). By substituting these parameters into (B.9), (B.17), and (B.20), β1, β3, β6, β7, k3, and k6 are calculated. Then, the ranges of β2, δ0, δ3, β4, β8, β5, β9, δ5, δ6, δ7, and δ8 can be determined in turn based on (A.21–A.22), (B.19), (B.22), and (B.30)-(B.35). We substitute (B.18) into (A.22) and choose large enough values of k1 and k2 such that (A.22) and (B.25–B.26) hold. Similarly, we substitute (B.18) into (A.23) and select k4 and k5 to satisfy (A.23) and (B.28–B.29). Finally, α1 and α3 are calculated using (B.18) and (B.21).
The simulations were performed by using MATLAB, wherein the finite difference method was utilized to determine the approximate solutions for the equations of motion. The approximate solutions’ accuracy and simulation speed depend on the sizes of the time and space steps (i.e., Δt and Δx, respectively). By using a large time step size, approximate solutions of PDEs are determined quickly. However, a too-large time step size reduces the accuracy of the solution and further leads to instability. Contrarily, the quality of the solutions can be improved by selecting a smaller step size. In this case, the simulation duration increases significantly. Therefore, selecting appropriate step sizes is necessary to guarantee a balance between accuracy and simulation speed. In this paper, the time and space step sizes are selected as follows: Δt = 10–5 and Δx = 0.075.
The dynamic behavior of the proposed control law (15) and (16) is compared with two typical cases: (i) Using the traditional PD control law and (ii) using the zero-vibration (ZV) input shaping control. For the input shaping control, the ZV input shapers are designed based on the cantilever beam’s natural frequencies and damping ratios. The natural frequencies are determined via the solution of the frequency Eq.26, whereas the damping ratios are calculated by using the logarithmic decrement algorithm27.
Figures 2 and 3 illustrate the system’s responses under different controllers. Figure 2 shows the trolley’s position and gantry’s position, whereas Fig. 3 reveal the vibrations of the beam’s tip. It shows that the PD controller, input shaping controller, and the proposed controller can move the trolley and gantry to the desired position (i.e., Fig. 2). However, the traditional PD controller cannot deal with the beam’s vibrations, see Fig. 3. In this case, vibration suppression was done only based on structural damping; therefore, it requires a significant amount of time. Contrary to the PD control, the system’s vibrations under the input shaping control and the proposed control law were quickly suppressed, see Fig. 3. Most tip oscillations were eliminated when the trolley and gantry reached the desired positions (i.e., at t ≈ 4 s). Furthermore, the proposed control law showed an outstanding vibration suppression capability compared with the input shaping control (i.e., see the magnified graphs in Fig. 3). The control forces under the proposed control law and suppression of the three vibrations are depicted in Figs. 4 and 5.

(a) Trolley’s position and (b) gantry’s position.

Vibrations of the beam’s tip: (a) Transverse vibration w(l, t), (b) lateral vibration v(l, t), and (c) longitudinal vibration u(l, t).

Control forces under the proposed control law.

Vibrations of the three-dimensional flexible beam under the proposed control law: (a) Transverse vibration w(x, t), (b) lateral vibration v(x, t), and (c) longitudinal vibration u(x, t).
Figures 6 and 7 reveal the robustness of the proposed control law. In Fig. 6, we consider the system under the influence of disturbances. Two boundary disturbances, dy(t) = 10sin(20πt) and dz(t) = 8sin(20πt), are applied to the trolley and gantry, respectively. As shown in Fig. 6, the proposed control law can still eliminate most of the vibrations of the beam system under boundary disturbance. The sensitivity of the proposed control law to the measurement noises of the sensors is considered in Fig. 7. In this case, 20% noises are added in the feedback signals wxxx(0, t) and vxxx(0, t). Observably, the measurement noises have no significant effects on the responses of the closed-loop system under the proposed control law. The simulation results show that the proposed control law is not too sensitive to disturbances and measurement noises.

Vibrations of the beam’s tip under boundary disturbances: (a) Transverse vibration w(l, t), (b) lateral vibration v(l, t), and (c) longitudinal vibration u(l, t).

Vibrations of the beam’s tip under measurement noises in feedback signals: (a) Transverse vibration w(l, t), (b) lateral vibration v(l, t), and (c) longitudinal vibration u(l, t).
Conclusions
This paper investigated a vibration suppression problem of the three-dimensional cantilever beam fixed on a translating base. The equations of motions describing the nonlinear coupling dynamics of the beam’s transverse, lateral, longitudinal vibrations, the gantry, and the trolley were developed using the Hamilton principle. Accordingly, the control laws were designed. The asymptotic stability of the closed-loop system in the sense that the beam’s transverse vibration, lateral vibration, longitudinal vibration, and gantry’s position error and trolley’s position error converge to zero was proven via the Lyapunov method. Simulation results showed the effectiveness of the proposed control laws. In practical gantry systems, the length of the robotic arm varies in time, and the system is subjected to disturbances. Our future work will address extending the current control strategy to a varying-length flexible beam with moving base, providing experimental results.
Data availability
The data and codes generated or analyzed in this paper can be available upon the communication with the corresponding author.
References
Kim, B. & Chung, J. Residual vibration reduction of a flexible beam deploying from a translating hub. J. Sound Vib. 333(16), 3759–3775 (2014).
Mustafazade, A. et al. A vibrating beam MEMS accelerometer for gravity and seismic measurements. Sci. Rep. 10, 10415 (2020).
Gao, N., Zhao, D., Jia, R. & Liu, D. Microcantilever actuation by laser induced photoacoustic waves. Sci. Rep. 6, 19935 (2016).
Yang, R. et al. Nanoscale cutting using self-excited microcantilever. Sci. Rep. 12, 618 (2022).
Pham, P.-T. & Hong, K.-S. Dynamic models of axially moving systems: A review. Nonlinear Dyn. 100(1), 315–349 (2020).
Wang, H., Wang, X., Yang, W. & Du, Z. Design and kinematic modeling of a notch continuum manipulator for laryngeal surgery. Int. J. Control Autom. Syst. 18(11), 2966–2973 (2020).
Veryaskin, A. V. & Meyer, T. J. Static and dynamic analyses of free-hinged-hinged-hinged-free beam in non-homogeneous gravitational field: Application to gravity gradiometry. Sci. Rep. 12, 7215 (2022).
Eshag, M. A., Ma, L., Sun, Y. & Zhang, K. Robust boundary vibration control of uncertain flexible robot manipulator with spatiotemporally-varying disturbance and boundary disturbance. Int. J. Control Autom. Syst. 19(2), 788–798 (2021).
Hanagud, S. & Sarkar, S. Problem of the dynamics of a cantilevered beam attached to a moving base. J. Guid. Control Dyn. 12(3), 438–441 (1989).
Huang, J. S., Fung, R. F. & Tseng, C. R. Dynamic stability of a cantilever beam attached to a translational/rotational base. J. Sound Vib. 224(2), 221–242 (1999).
Park, S., Kim, B. K. & Youm, Y. Single-mode vibration suppression for a beam-mass-cart system using input preshaping with a robust internal-loop compensator. J. Sound Vib. 241(4), 693–716 (2001).
Cai, G. P., Hong, J. Z. & Yang, S. X. Dynamic analysis of a flexible hub-beam system with tip mass. Mech. Res. Commun. 32(2), 173–190 (2005).
Park, S., Chung, W. K., Youm, Y. & Lee, J. W. Natural frequencies and open-loop responses of an elastic beam fixed on a moving cart and carrying an intermediate lumped mass. J. Sound Vib. 230(3), 591–615 (2000).
Park, S. & Youm, Y. Motion of a moving elastic beam carrying a moving mass-analysis and experimental verification. J. Sound Vib. 240(1), 131–157 (2001).
Shah, U. H. & Hong, K.-S. Active vibration control of a flexible rod moving in water: Application to nuclear refueling machines. Automatica 93, 231–243 (2018).
Wu, D., Endo, T. & Matsuno, F. Exponential stability of two Timoshenko arms for grasping and manipulating an object. Int. J. Control Autom. Syst. 19(3), 1328–1339 (2021).
Shin, K. & Brennan, M. J. Two simple methods to suppress the residual vibrations of a translating or rotating flexible cantilever beam. J. Sound Vib. 312(1–2), 140–150 (2008).
Han, F. & Jia, Y. Sliding mode boundary control for a planar two-link rigid-flexible manipulator with input disturbances. Int. J. Control Autom. Syst. 18(2), 351–362 (2020).
Yang, L. J. & Guo, Y. P. Output feedback stabilisation for an ODE-heat cascade systems subject to boundary control matched disturbance. Int. J. Control Autom. Syst. 19(11), 3611–3621 (2021).
Nguyen, Q. C., Piao, M. & Hong, K.-S. Multivariable adaptive control of the rewinding process of a roll-to-roll system governed by hyperbolic partial differential equations. Int. J. Control Autom. Syst. 16(5), 2177–2186 (2018).
Nguyen, Q. C. & Hong, K.-S. Simultaneous control of longitudinal and transverse vibrations of an axially moving string with velocity tracking. J. Sound Vib. 331(13), 3006–3019 (2012).
Zhou, Y., Cui, B. & Lou, X. Dynamic H∞ feedback boundary control for a class of parabolic systems with a spatially varying diffusivity. Int. J. Control Autom. Syst. 19(2), 999–1012 (2021).
Wang, L. & Jin, F. F. Boundary output feedback stabilization of the linearized Schrödinger equation with nonlocal term. Int. J. Control Autom. Syst. 19(4), 1528–1538 (2021).
Fu, M., Zhang, T. & Ding, F. Adaptive safety motion control for underactuated hovercraft using improved integral barrier lyapunov function. Int. J. Control Autom. Syst. 19(8), 2784–2796 (2021).
Xia, H., Chen, J., Lan, F. & Liu, Z. Motion control of autonomous vehicles with guaranteed prescribed performance. Int. J. Control Autom. Syst. 18(6), 1510–1517 (2020).
Shah, U. H., Hong, K.-S. & Choi, S. H. Open-loop vibration control of an underwater system: Application to refueling machine. IEEE-ASME Trans. Mechatron. 22(4), 1622–1632 (2017).
Pham, P.-T., Kim, G.-H., Nguyen, Q. C. & Hong, K.-S. Control of a non-uniform flexible beam: Identification of first two modes. Int. J. Control Autom. Syst. 19(11), 3698–3707 (2021).
Lin, J. & Chao, W. S. Vibration suppression control of beam-cart system with piezoelectric transducers by decomposed parallel adaptive neuro-fuzzy control. J. Vib. Control 15(12), 1885–1906 (2009).
Qiu, Z. C. Adaptive nonlinear vibration control of a Cartesian flexible manipulator driven by a ballscrew mechanism. Mech. Syst. Signal Proc. 30, 248–266 (2012).
Hong, K.-S., Chen, L.-Q., Pham, P.-T. & Yang, X.-D. Control of Axially Moving Systems (Springer, 2021).
Hong, K.-S. & Pham, P.-T. Control of axially moving systems: A review. Int. J. Control Autom. Syst. 17(12), 2983–3008 (2019).
Sun, C., He, W. & Hong, J. Neural network control of a flexible robotic manipulator using the lumped spring-mass model. IEEE Trans. Syst. Man Cybern. Syst. 47(8), 1863–1874 (2017).
Khot, S. M., Yelve, N. P., Tomar, R., Desai, S. & Vittal, S. Active vibration control of cantilever beam by using PID based output feedback controller. J. Vib. Control 18(3), 366–372 (2012).
Pham, P. T., Kim, G.-H. & Hong, K.-S. Vibration control of a Timoshenko cantilever beam with varying length. Int. J. Control Autom. Syst. 20(1), 175–183 (2022).
Liu, Z. & Liu, J. PDE Modeling and Boundary Control for Flexible Mechanical System 137–171 (Springer, 2020).
Ji, N., Liu, Z., Liu, J. & He, W. Vibration control for a nonlinear three-dimensional Euler-Bernoulli beam under input magnitude and rate constraints. Nonlinear Dyn. 91(4), 2551–2570 (2018).
Zhang, Y., Liu, J. & He, W. Vibration control for a nonlinear three-dimensional flexible manipulator trajectory tracking. Int. J. Control 89(8), 1641–1663 (2016).
Do, K. D. & Pan, J. Boundary control of three-dimensional inextensible marine risers. J. Sound Vib. 327(3–5), 299–321 (2009).
Do, K. D. Boundary control design for extensible marine risers in three-dimensional space. J. Sound Vib. 388, 1–19 (2017).
Ge, S. S., He, W., How, B. V. E. & Choo, Y. S. Boundary control of a coupled nonlinear flexible marine riser. IEEE Trans. Control Syst. Technol. 18(5), 1080–1091 (2009).
He, W., Yang, C., Zhu, J., Liu, J. K. & He, X. Active vibration control of a nonlinear three-dimensional Euler–Bernoulli beam. J. Vib. Control 23(19), 3196–3215 (2017).
Ji, N. & Liu, J. Adaptive neural network control for a nonlinear Euler–Bernoulli beam in three-dimensional space with unknown control direction. Int. J. Robust Nonlinear Control 29(13), 4494–4514 (2019).
Ji, N. & Liu, J. Vibration and event-triggered control for flexible nonlinear three-dimensional Euler–Bernoulli beam system. J. Comput. Nonlinear Dyn. 15(11), 111007 (2020).
Liu, Z., Liu, J. & He, W. Boundary control of an Euler–Bernoulli beam with input and output restrictions. Nonlinear Dyn. 92(2), 531–541 (2018).
Zhu, W. D., Ni, J. & Huang, J. Active control of translating media with arbitrarily varying length. J. Vib. Acoust. 123(3), 347–358 (2001).
Zhu, W. D. & Ni, J. Energetics and stability of translating media with an arbitrarily varying length. J. Vib. Acoust. 122(3), 295–304 (2000).
Ghayesh, M. H. & Farokhi, H. Nonlinear dynamical behavior of axially accelerating beams: Three-dimensional analysis. J. Comput. Nonlinear Dyn. 11(1), 011010 (2016).
Hardy, G. H., Littlewood, J. E. & Polya, G. Inequalities (Cambridge University Press, 1959).
Rahn, C. D. Mechanical Control of Distributed Noise and Vibration (Springer, 2001).
Hong, K.-S. & Bentsman, J. Direct adaptive control of parabolic systems: Algorithm synthesis and convergence and stability analysis. IEEE Trans. Autom. Control 39(10), 2018–2033 (1994).
Queiroz, M. S., Dawson, D. M., Nagarkatti, S. P. & Zhang, F. Lyapunov Based Control of Mechanical Systems (Birkhauser, 2000).
Acknowledgements
This work was supported by the Korea Institute of Energy Technology Evaluation and Planning under the Ministry of Trade, Industry and Energy, Korea (South) (grant no. 20213030020160). We acknowledge Ho Chi Minh City University of Technology (HCMUT), VNU-HCM for supporting this study.
Author information
Authors and Affiliations
Contributions
P.-T. Pham derived the entire mathematical equations and wrote the first draft manuscript, Q. C. Nguyen reviewed the manuscript, M. Yoon reviewed the manuscript, and K.-S. Hong conceived the idea, supervised the project, and revised the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
The proof of Lemma 4 is shown in here. By using Lemmas 1–2, we obtain
According to (A.1)-(A.11), the lower bound of V0 and V1 are given by
Based on (A.12) and (A.13), the lower bound of the Lyapunov function candidate is obtained as follows.
where \(\lambda_{1} = \min \left( {\lambda_{11} ,\lambda_{12} ,...,\lambda_{19} } \right)\) and \(\alpha_{i}\),\(\beta_{j}\), and \(\delta_{k}\) (\(i = 1,2,...,6\), \(j = 1,2,...,9\), and \(k = 1,2,...,4\)) are selected to guarantee that \(\lambda_{1n}\) (\(i = 1,2,...,9\)) satisfy
Similarly, the upper bound of the Lyapunov function candidate can be obtained by using (A.1)-(A.11), that is
where \(\lambda_{2} = \max \left( {\lambda_{21} ,\lambda_{22} ,...,\lambda_{211} } \right)\) and
Based on (A.14–A.23) and (A.24–A.25), Lemma 4 is proven.
Appendix B
The proof of Lemma 5 is shown here. The time derivative of V0 is derived as follows.
For notational convenience, ε is used instead of \((u_{x} + w_{x}^{2} /2\)\(+ v_{x}^{2} /2)\) (i.e., ε is the axial strain given in (3)). Substituting the dynamic model in (5)-(12) into (B.1) yields
By using the boundary conditions and \(P(l) = 0\), (B.2) can be rewritten as
The time derivative of V1 is derived as follows.
Using the dynamic model and boundary conditions in (5)-(12) yields
According to (B.3) and (B.5), the time derivative of V is derived as follows.
By using integration by parts and Lemma 1, the following inequality and equation are obtained.
where δ5 is a positive constant. It is noted that the inequalities \(w_{x}^{4} \ll w_{x}^{2}\) and \(v_{x}^{4} \ll v_{x}^{2}\) are used in (B.7). By letting βi satisfy the following conditions
and using Lemmas 1 and 2 for the terms \(\int_{0}^{l} {\dot{y}w_{t} dx}\), \(\int_{0}^{l} {e_{{\text{y}}} w_{t} dx}\), \(\int_{0}^{l} {\dot{z}v_{t} dx}\), and \(\int_{0}^{l} {e_{{\text{z}}} v_{t} dx}\) of (B.6), we obtain
where
In (B.10–B.12), δi (i = 6, 7, 8, 9) are positive constants. Substituting the control laws in (15) and (16) into (B.11) and (B.12), respectively, yields
where
If the following conditions hold
then (B.10) can be rewritten as follows.
Inequality (B.23) leads to the following result
where \(\lambda_{3} = \min \left( {\lambda_{31} ,\lambda_{32} ,...,\lambda_{311} } \right)\) and coefficients \(\alpha_{i}\), \(\beta_{j}\), and \(\delta_{k}\) (i = 1, 2,…, 6, j = 1, 2,…,9, and k = 1, 2,…,8) satisfy the conditions:
Based on Lemma 4, the following inequality is derived
where \(\lambda = \lambda_{3} /\lambda_{2}\). Accordingly, Lemma 5 is proven.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pham, PT., Nguyen, Q.C., Yoon, M. et al. Vibration control of a nonlinear cantilever beam operating in the 3D space. Sci Rep 12, 13811 (2022). https://doi.org/10.1038/s41598-022-16973-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-16973-y
- Springer Nature Limited
This article is cited by
-
On resonances and transverse and longitudinal oscillations in a hoisting system due to boundary excitations
Nonlinear Dynamics (2023)
-
Adaptive Control of a Flexible Varying-length Beam with a Translating Base in the 3D Space
International Journal of Control, Automation and Systems (2023)
-
Experimental Investigation of Pulse Width Modulation-Based Electromagnetic Vibration Attenuation of a Ferromagnetic Flexible Cantilever Beam (FCB)
Journal of Vibration Engineering & Technologies (2023)