
Abstract
In this paper, the vibration control problem for the nonlinear three-dimensional Euler–Bernoulli beam with input magnitude and rate constraints is addressed. By using the backstepping method with smooth hyperbolic tangent function, a boundary control scheme is designed to suppress vibration of the nonlinear three-dimensional Euler–Bernoulli beam and to satisfy the input magnitude and rate constraints. It is proved that the proposed control scheme can handle the vibration and input magnitude and rate constraints simultaneously. Finally, numerical simulations illustrate the effectiveness of the proposed control.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, a number of researchers are devoted to design control laws and stability analysis of partial differential equation systems and many researchers have done a lot of significant work in this field [1,2,3,4,5,6,7]. In [8], the vibration control design is proposed to suppress the vibration of a flexible Euler–Bernoulli beam under the boundary output constraint. In [9], the boundary stabilization of a one-dimensional tip-force destabilized shear beam equation is considered with boundary control. In [10], the finite-dimensional backstepping control and Lyapunov’s direct method are applied in boundary control law design. An adaptive boundary control is developed in [11] to suppress the belt’s vibration. In [12], boundary control law is designed on the original PDE dynamics to reduce the hose’s vibration. A hybrid control scheme which combines the advantages of task-space and joint-space control is presented in [13]. In [14], the sliding mode control (SMC) with the backstepping approach is developed to deal with the disturbance in the boundary feedback stabilization design of heat PDE–ODE system. To suppress the vibration of the nonuniform system in [15], full state feedback boundary control is developed for a class of axially moving nonuniform system. In [16], boundary vibration suppression for an axially moving belt with high acceleration/deceleration is studied. In [17], robust adaptive control applied at the top boundary is developed for a thruster assisted position mooring system via Lyapunov’s direct method.
In practice, many researchers do not take the control input constraints into account. However, constraint problem is a very important problem for the research because of physical limits of the controller. Researchers are supposed to pay more attention on it. In [18], state feedback boundary control with an auxiliary system is designed, which is proposed to compensate for the input constraint. The anti-windup design in [19] is proposed for the boundary control problem of a flexible manipulator. By using the backstepping method in [20], a boundary control scheme with smooth hyperbolic function is proposed based on the original PDEs to regulate the hose’s vibration with input constraint. In [21], a neural network (NN) controller approximated by a radial basis function neural network (RBFNN) is designed to suppress the vibration of a flexible robotic manipulator system with input deadzone. In [22], boundary control law is designed to regulate angular position and suppress elastic vibration simultaneously. And smooth hyperbolic functions are used to satisfy input constraints. These above works are all talking about how to solve the input constraint problem. However, they do not solve input magnitude and rate constraints simultaneously. In [23], the paper studies the control problem of spacecraft under control input magnitude and rate constraints, but it aims at ordinary differential equation.
In this work, we study the vibration suppression problem for the nonlinear three-dimensional Euler–Bernoulli beam with input magnitude and rate constraints. The backstepping method with smooth hyperbolic tangent function is proposed to control the effect of the input magnitude and input rate constraints. The system stability is tested on the basis of the Lyapunov’s direct method. The main contributions in this paper are summarized below: (1) Boundary control system with smooth hyperbolic tangent function by using backstepping method is designed to stabilize the nonlinear three-dimensional Euler–Bernoulli beam under the condition of input magnitude and rate constraints; (2) the system stability analysis is on the basis of the Lyapunov’s direct method without simplification.
The rest of this paper is organized as follows. An Euler–Bernoulli beam with a payload in the three-dimensional space with input magnitude and rate constraints is shown in Sect. 2. In Sect. 3, a boundary control scheme is designed and analyzed. In Sect. 4, numerical simulations are demonstrated to show the effectiveness of the proposed controller. A conclusion is drawn in Sect. 5.
2 System statement
2.1 Dynamics analysis
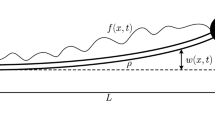
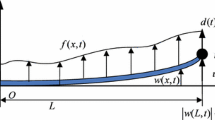
In this paper, we study Euler–Bernoulli beam with a payload in the three-dimensional space with input magnitude and rate constraints. The effect of gravity is ignored due to the flexibility of the beam. In the engineering field, the model of three-dimensional Euler–Bernoulli beam has been widely used in many areas, such as the flexible marine risers in [18] and flexible aerial refueling hose in [20]. The system is shown in Fig. 1.

A nonlinear three-dimensional Euler–Bernoulli beam with a payload
In Fig. 1, OUVW is the fixed global inertial coordinate. The bending stiffness, the axial stiffness, and the tension of the beam are represented by EI, EA, and T. \(\rho \) represents the mass per meter of the link. The length of the link is represented by l. The mass of the payload at the top of the beam is represented by m. \(U_u \), \(U_v \), \(U_w \) and \(\dot{U}_u \), \(\dot{U}_v \), \(\dot{U}_w\) are the inputs and the input rates generated at the top of the beam by the controllers, respectively.
Remark 1
For clarity, the following notations are used throughout this article:
The model of the nonlinear three-dimensional Euler–Bernoulli beam with a payload is given by [24].
\(\forall (s,t)\in [0,l]\times [0,\infty )\), and the boundary conditions are shown as follows:
2.2 Preliminaries
Lemma 1
[25] Let \(\varphi (s,t)\in R\) be a function defined on \(s\in \left[ {0,l} \right] \) and \(t\in \left[ {0,\infty } \right] \) that satisfies the boundary conditions \(\varphi (0,t)=0,\forall t\in \left[ {0,\infty } \right) \), then the following inequalities hold:
Lemma 2
[26] Let \(\varphi _1 (s,t),\varphi _2 (s,t)\in R\) with \(s\in \left[ {0,l} \right] \) and \(t\in \left[ {0,\infty } \right] \), then the following inequalities hold:
3 Control design and stability analysis
In this paper, the usual block diagram of the closed-loop control of the nonlinear three-dimensional Euler–Bernoulli beam is given as follows (Fig. 2).

the usual block diagram of the closed-loop control of the nonlinear three-dimensional Euler–Bernoulli beam system
3.1 Control design
The control objective is to suppress elastic vibration of the nonlinear three-dimensional Euler–Bernoulli beam in the presence of input magnitude and rate constraints. The backstepping method with smooth hyperbolic tangent function is used to design control laws \(U_u\), \(U_v\), \(U_w\). The Lyapunov’s direct method is adopted to analyze the closed-loop stability of the system.
In this paper, the control inputs with magnitude constraints are described as:
In this paper, the control inputs with rate constraints are described as:
As the usual backstepping approach, we define the variables as follows:
Step 1 We consider the Lyapunov function as
where
Differentiating the Lyapunov function \(V_1 \left( t \right) \), we can obtain
where
Substituting (1)–(3) into \(A_1 \), we can obtain
Then, integrating \(A_2 -A_4\) by parts, we can obtain
Noticing that (6)–(8) and combining \(A_1 -A_4 \), we can have
where
The derivative of \(V_2 \left( t \right) \) is
where
Substituting (1) into\(B_1 \), we obtain
Then, integrating \(B_1\) by parts, we obtain
Similarly, substituting (2)–(3) into \(B_2 -B_3\), respectively, and then integrating \(B_2 -B_3\) by parts, we can obtain
Then, integrating \(B_4 \)by parts, we obtain
Noticing that
Combining \(B_1 -B_4\) and noticing that (6)–(8), we have
Noting that (6)–(8), the derivative of (24) is
By combining (49), we can get
Noting that (18)–(20), we can obtain
where
Choosing the virtual control laws as
where \(c_1 >0\), \(c_2 >0\), \(c_3 >0\),we have
Step 2 Then, we consider a Lyapunov function candidate
Then, we design the auxiliary system as
Noting that (18)–(20) and (58)–(60), the derivative of (57) is
Applying (21)–(23) into (61), we can obtain
Then, we choose the virtual control laws as
where \(c_4 >0\), \(c_5 >0\), \(c_6 >0\), we can obtain
Step 3 Then, we consider a Lyapunov function candidate
Then, we design the another auxiliary system as
Noting that (21)–(23) and (68)–(70), the derivative of (67) is
Then, we choose the virtual control laws as
where \(c_7 >0\), \(c_8 >0\), \(c_9 >0\), we can obtain
Substituting \(d_{11} ,d_{12} ,d_{13} ,d_{21} ,d_{22} ,d_{23} ,d_{31} ,d_{32} ,d_{33} ,D\) into (75), we can get
Noticing that \(d_{11} =\dot{u}_l +\beta l{u}'_l \), \(d_{12} =\dot{v}_l +\beta l{v}'_l\), \(d_{13} =\dot{w}_l +\beta l{w}'_l \), we have
Applying the inequality \(2\left[ {{w}'(s,t)} \right] ^{2}\le \left[ {{u}'(s,t)} \right] ^{2},2\left[ {{w}'(s,t)} \right] ^{2}\le \left[ {{v}'(s,t)} \right] ^{2}\) in [27], we can get
3.2 Stability analysis
Rewritten (25) as
Applying the inequality \(2\left[ {{w}'(s,t)} \right] ^{2}\le \left[ {{u}'(s,t)} \right] ^{2},2\left[ {{w}'(s,t)} \right] ^{2}\le \left[ {{v}'(s,t)} \right] ^{2}\) in [27] and lemma 2, we have
where \(\delta \) is a constant.
Let \(\delta \) satisfy \(T-\frac{{\hbox {EA}}}{2\delta }\ge 0\) and \(\frac{1}{4}-\delta \ge 0\), we can obtain
where
Similarly, we can obtain
Let \(\beta \) satisfy \(\beta \rho l<\sigma _1 \), we have \(0<\beta \rho l<m_1 \). Let \(m_1 =\sigma _1 -\beta \rho l\), \(m_2 =\sigma _2 +\beta \rho l\), we can get
We conclude
Therefore, we can further obtain
where \(\lambda _1 =\min (m_1 ,1)=m_1 \), \(\lambda _2 =\max (m_2 ,1)=m_2\) are two positive constants.
From (78), we can obtain
Therefore,
where
The parameters are selected to satisfy the following conditions
We further obtain
where \(\lambda =\frac{\lambda _3 }{\lambda _2 }>0\).
Then, multiplying (93) by \(\hbox {e}^{\lambda t}\) and integrating the inequality, we can get
Applying Lemma 1 in (81), we can obtain
Through clear up the above three inequalities, we can obtain
Furthermore, considering (98)–(100), we can further obtain
Moreover, considering (9)–(11), we obtain
and

Displacement of the Euler–Bernoulli beam in U direction in case 1

Displacement of the Euler–Bernoulli beam in V direction in case 1

Displacement of the Euler–Bernoulli beam in W direction in case 1

Displacement of the Euler–Bernoulli beam in U direction in case 2

Displacement of the Euler–Bernoulli beam in V direction in case 2

Displacement of the Euler–Bernoulli beam in W direction in case 2

Displacement of the Euler–Bernoulli beam at the length of l in U direction in case 1and case 2

Displacement of the Euler–Bernoulli beam at the length of l in V direction in case 1and case 2

Displacement of the Euler–Bernoulli beam at the length of l in W direction in case 1and case 2

Control input when \(u_M =8\) for case 2

Control inputs for case 3

Control input rate constraints when \(v_M =25\) for case 2

Control input rates for case 3
4 Numerical simulations
In this section, in order to demonstrate the effectiveness of the proposed model-based boundary control laws (9)–(11), we choose the finite difference method to carry out the numerical simulation. The current method to realize the simulation of PDE model is to discretize the PDE model. In the discretization process, the sampling time \(\Delta t=T\) and the x axis spacing \(\Delta x=\hbox {d}x\) should satisfy the certain relationship \(\Delta t\le \frac{1}{2}\Delta x^{2}\) in [28]. The parameters of the Euler–Bernoulli beam in the three-dimensional space are listed in Table 1. Let \(u_M >0\), \(v_M >0\) be the given constants. The constraints on the input signals \(U_u\), \(U_v \), \(U_w\) are given by \(\left| {U_u } \right| \le u_M\), \(\left| {U_v } \right| \le u_M \), \(\left| {U_w } \right| \le u_M\). The input rate constraints are given by \(\left| {\dot{U}_u } \right| \le v_M \),\(\left| {\dot{U}_v } \right| \le v_M \), \(\left| {\dot{U}_w } \right| \le v_M \). The input constraints are \(u_M =8\). The input rate constraints are \(v_M =25\). The initial conditions are chosen as \(u(s,0)=v(s,0)=w(s,0)=\frac{s}{2l}\), \(\dot{u}(s,0)=\dot{v}(s,0)=\dot{w}(s,0)=0\).
For analyzing and verifying the control performance, the dynamic responses of the system are simulated in the following three cases:
Case 1: Without control input.
Case 2: With the proposed control: We choose the control parameters as \(\beta =0.05, c_1 =10, c_2 =10, c_3 =8.2, c_4 =3 , c_5 =3, c_6 =3, c_7 =3, c_8 =3, c_9 =3\).
Case 3: With the control method in [24]:
and the control parameters are chosen as: \(k_1 =15\), \(k_2 =15\), \(k_3 =5\).
The simulation results are presented in Figs. 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, and 15. Figs. 3, 4, and 5 show the displacements of the beam in U, V, W direction for case 1, and the displacements of the beam for case 2 are shown in Figs. 6, 7, and 8. The displacements of the beam at the length of l for case 1 and case 2 are shown in Figs. 9, 10, and 11. We can clearly see that the proposed control scheme for case 2 can regulate the displacements for the nonlinear three-dimensional Euler–Bernoulli beam.
Control inputs for case 2 and case 3 are shown in Figs. 12 and 13, respectively. From Figs. 12 and 13, we can see that the input amplitude for case 2 is smaller than the input amplitude for case 3, and the input value for case 3 is larger than the input constraints. Control input rates for case 2 and case 3 are shown in Figs. 14 and 15, respectively. From Fig. 14, we can clearly see that the control input rates can be confined in \(v_M =25\).
From above analysis, we can conclude that the control system proposed in this paper can satisfy the input magnitude and rate constraints, respectively.
5 Conclusions
In this paper, boundary control systems are proposed to suppress the vibration of the nonlinear three-dimensional Euler–Bernoulli beam with input magnitude and rate constraints. To suppress the vibration of the nonlinear three-dimensional Euler–Bernoulli beam with constrained inputs and input rates, backstepping method with smooth hyperbolic tangent function is developed. In the controller design, two auxiliary systems are used to handle the impacts of the constrained input and input rates. Boundary control laws are designed using Lyapunov’s direct method. In addition, the proposed control laws have been illustrated to stabilize the beam under input magnitude and rate constraints. The closed-loop system finally has a good control performance. We can see that the control system with boundary control works well when the input magnitude and rate constraints are relatively small from simulation results.
References
Guo, F., Liu, Y., Zhao, Z.J., Luo, F.: Adaptive vibration control of a flexible marine riser via the backstepping technique and disturbance adaptation. Trans. Inst.Meas. Control. 014233121668401 (2017)
He, W., Zhang, S.: Control design for nonlinear flexible wings of a robotic aircraft. IEEE Trans. Control Syst. Technol. 25(1), 351–357 (2017)
He, W., Zhang, S., Ge, S.S.: Adaptive control of a flexible crane system with the boundary output constraint. IEEE Trans. Industr. Electron. 61(8), 4126–4133 (2014)
Xu, G.Q.: Boundary feedback exponential stabilization of a Timoshenko beam with both ends free. Int. J. Control 78(4), 286–297 (2005)
Yang, H.J., Liu, J.K., Lan, X.: Observer design for a flexible-link manipulator with PDE model. J. Sound Vib. 341, 237–245 (2015)
Wang, J.M., Su, L.L., Li, H.X.: Stabilization of an unstable reaction-diffusion PDE cascaded with a heat equation. Syst. Control Lett. 76, 8–18 (2015)
How, B.V., Ge, S.S., Choo, Y.S.: Active control of flexible marine risers. J. Sound Vib. 320(4), 758–776 (2009)
He, W., Ge, S.S.: Vibration control of a flexible beam with output constraint. IEEE Trans. Industr. Electron. 62(8), 5023–5030 (2015)
Liu, J.J., Chen, X., Wang, J.M.: Sliding mode control to stabilization of a tip-force destabilized shear beam subject to boundary control matched disturbance. J. Dyn. Control Syst. 22(1), 1–12 (2016)
Liu, Y., Zhao, Z.J., He, W.: Boundary control of an axially moving accelerated/decelerated belt system. Int. J. Robust Nonlinear Control 26(17), 3849–3866 (2016)
Liu, Y., Zhao, Z.J., He, W.: Stabilization of an axially moving accelerated/decelerated system via an adaptive boundary control. ISA Trans. 64, 394–404 (2016)
Liu, Z.J., Liu, J.K., He, W.: Dynamic modeling and vibration control of a flexible aerial refueling hose. Aerosp. Sci. Technol. 55, 92–102 (2016)
Smith, A.M., Yang, C., Ma, H., Culverhouse, P., Cangelosi, A., Burdet, E.: Novel hybrid adaptive controller for manipulation in complex perturbation environments. PLoS ONE 10(6), e0129281 (2015)
Wang, J.M., Liu, J.J., Ren, B., Chen, J.: Sliding mode control to stabilization of cascaded heat PDE-ODE systems subject to boundary control matched disturbance. Automatica 52, 23–34 (2015)
Zhao, Z.J., Liu, Y., Guo, F., Fu, Y.: Modelling and control for a class of axially moving nonuniform system. Int. J. Syst. Sci. 48(4), 849–861 (2017)
Zhao, Z.J., Liu, Y., He, W., Luo, F.: Adaptive boundary control of an axially moving belt system with high acceleration/deceleration. IET Control Theory Appl. 10(11), 1299–1306 (2016)
He, W., Zhang, S., Ge, S.S.: Robust adaptive control of a thruster assisted position mooring system. Automatica 50(7), 1843–1851 (2014)
He, W., He, X.Y., Ge, S.S.: Vibration control of flexible marine riser systems with input saturation. IEEE/ASME Trans. Mechatron. 21(1), 254–265 (2016)
Liu, Z., Liu, J., He, W.: Adaptive boundary control of a flexible manipulator with input saturation. Int. J. Control 89(6), 1–21 (2016)
Liu, Z.J., Liu, J.K., He, W.: Vibration control of a flexible aerial refueling hose with input saturation. Int. J. Syst. Sci. 48, 1–13 (2017)
He, W., Ouyang, Y., Hong, J.: Vibration control of a flexible robotic manipulator in the presence of input deadzone. IEEE Trans. Industr. Inf. 13(1), 48–59 (2017)
Liu, Z.J., Liu, J.K., He, W.: Partial differential equation boundary control of a flexible manipulator with input saturation. Int. J. Syst. Sci. 48(1), 53–62 (2017)
Zou, A.M., Kumar, K.D., Ruiter, A.H.J.: Robust attitude tracking control of spacecraft under control input magnitude and rate saturations. Int. J. Robust Nonlinear Control 26(4), 799–815 (2016)
He, W., Yang, C., Zhu, J., Liu, J.K., He, X.: Active vibration control of a nonlinear three-dimensional Euler-Bernoulli beam. J. Vib. Control (2016). https://doi.org/10.1177/1077546315627722
Hardy, G.H., Littlewood, J.E., Pólya, G.: Inequalities, pp. 115–138. Cambridge at the University Press, Cambridge (1964)
Rahn, C.D.: Mechatronic Control of Distributed Noise and Vibration. Springer, Berlin (2001)
Nguyen, Q.C., Hong, K.S.: Simultaneous control of longitudinal and transverse vibrations of an axially moving string with velocity tracking. J. Sound Vib. 331(13), 3006–3019 (2012)
Abhyankar, N.S., Hall, E.K., Hanagud, S.V.: Chaotic vibrations of beams: numerical solution of partial differential equations. J. Appl. Mech. 60(1), 167–174 (1993)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant Number 61374048).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ji, N., Liu, Z., Liu, J. et al. Vibration control for a nonlinear three-dimensional Euler–Bernoulli beam under input magnitude and rate constraints. Nonlinear Dyn 91, 2551–2570 (2018). https://doi.org/10.1007/s11071-017-4031-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-4031-y